Anbei mein AVRootloader.
- unterstützt alle selbstprogramierbaren 8Bit-AVRs
- 1-Wire und 2-Wire RS232 Modus, invertierbar
- Baudraten je nach XTAL von 600 bis zu 256000 Baud per USB-RS232
- XTEA Verschlüsselung für FLASH/EEPROM Schreiben
- 16Bit CRC für die komplette Datenübertragung, Senden & Empfangen
- FLASH schreiben/löschen mit implizitem Verify
- separates FLASH Verify
- EEPROM schreiben/lesen, schreiben mit implizitem Verify
- SRAM schreiben/lesen
- Baudrate Detektion, Baudrate kann aber auch fest eingestellt werden
- WatchDog Unterstützung
- fertige PC-Software mit HEX-Editoren für EEPROM & SRAM/Registerfile/IO
Ports
- ATmega128 bei 115200 Baud in 16 sec mit Verschlüsselung 22 Sekunden
- im ZIP Datei AVRootloader.txt enthält Anleitung
- je nach Konfiguration zwischen 344 bis 906 Bytes Codegröße, letzters
mit XTEA Entschlüsselungsfunktion
Gruß Hagen
Hallo Hagen,
mal 'ne andere Frage, womit hast Due die Windows-Applikation
programmiert?
Nur eine EXE, das gefällt mir und die Optik ist Dir auch ganz gut
gelungen.
Danke.
Gast
@Peter: Ich habe sie nach Datenblatt des ATTiny461 und ATMega88-168
programmiert. Ist sie etwa falsch ?
@Gast: Ja ist Delphi 5. Der HEX-Editor ist von Mirkes.de wobei ich
diesen nur empfehlen kann weil es der einzigste freie für Delphi auf dem
Markt ist.
COM Port Zugriff habe ich in eigenes Objekt implementiert und benutzt
Overlapped-IO.
Gruß Hagen
@Werner,
BAT54C sind SMD in SOT23, keine Z-Dioden, sind Schottky Dioden. Ist
eventuell beim Eagle Symbol nicht so gut erkennebar ?!
Wichtig ist der 2k Widerstand, bei Peters Bootloader wurde dort ein 4k7
angegeben. Ich habe diese bei meinen Tests mit ATmega128, ATmega168 und
ATtiny461 dann auf 2k reduziert. Als RS232 habe ich die RS232 meines
Laptops, der Dockingstation des Laptops und ein USB-RS232.Kabel
getestet. Mit dem 2k ging es besser, aber ich benutze auf AVR Seite ja
auch nur den interne PullUp statt einem externen. Das hat dann alles
funktioniert mit Baudrate von 600 bis 256000 Baud, vorrausgesetzt der
Takt des AVRs ist hoch genug für die hohen Baudraten. Den ATtiny461 habe
ich mit internem RC Oszillator + PLL laufen, sind dann 16MHz. Den
ATMega128 mit externem Quarz bei 15.97MHz.
@Peter,
ich habe noch mal in das ATmega168 Datenblatt geschaut und ich meine das
ich keinen Fehler mit dem Watchdog gemacht habe. Im Datenblatt Seite 48
ist exakt die Sequenz angegeben die ich auch benutzt habe, eben mit dem
Unterschied das WDE über die ODER Verknüpfung gesetzt wird, ist auf
Seiet 47 ebenfalls beschrieben.
Testen konnte ich den WatchDog eben nur für die genannten 3 AVRs und da
hat er funktioniert.
Nur beim ATTiny461 sind par Ungereimtheiten die aber nichts direkt damit
zu tuen haben. Wenn man bei dem Teil die WDTON Fuse setzt und dann
wieder löscht so wird der WatchDog solange mit ständig gesetzem WDE Bit
laufen bis man dem AVR den Saft abdreht. Ein RESET setzt das WDE Bit
noch lange nicht zurück. Anderst ausgedrückt: löscht man die WDTON Fuse
dann muß man dem AVR den Saft abdrehen damit das auch eine Wirkung
erzielt. Ein einfaches RESET reicht nicht aus. Dh. nach dem Löschen von
WDTON verhält sich der AVR noch solange als ob WDTON gesetzt ist bis er
keinen Saft mehr hat !! Das hat mich Stunden an Fehlersuche gekostet und
ich war schon der Meinung ich habe den ATTiny461 geschrottet.
Gruß Hagen
Hagen Re wrote:
> @Peter,> ich habe noch mal in das ATmega168 Datenblatt geschaut und ich meine das> ich keinen Fehler mit dem Watchdog gemacht habe.
Hab ich ja nicht behauptet, sondern das es die gleiche Sequenz ist, die
ich als letztes gepostet hatte. Sie sollte daher funktionieren.
Ich hatte vorher ne andere, die nicht funktioniert hat.
Man darf beim ersten Schreiben nicht die WDP-Bits anders setzen, dann
wirds ignoriert.
Steht aber nirgends im Datenblatt. Hat mich auch einige Zeit gekostet.
Den Rest des Codes habe ich noch nicht verdaut.
Ich hab da immer Probleme mit so großen monolitischen Brocken, daher
unterteile ich gerne alles in kleine Häppchen. Auch wenn dann vielleicht
ein paar CALLs und RETs mehr an Code entstehen.
Dein Code ist ja auch äußerst sparsam kommentiert.
Die Umleitung des Bootloader-Reset bei den ATtinyxxx/ATmega48 machst Du
vermutlich schon in der EXE.
Ich habs deswegen im AVR gemacht, damit selbst bei Empfangsfehlern kein
Aussperren möglich ist. Ist ja auch nicht viel Code.
Zumindest das Löschen sollte aber von oben nach unten erfolgen.
Peter
Hi Peter,
>Ich hatte vorher ne andere, die nicht funktioniert hat.>Man darf beim ersten Schreiben nicht die WDP-Bits anders setzen, dann>wirds ignoriert. Steht aber nirgends im Datenblatt.
Hm das es ignoriert werden soll wusste ich auch nicht. In irgendeinem
der Datenblätter steht aber das man die WDP Bits erst setzen sollte wenn
man vorher das WDCE Bit einmalig gesetzt hat da ansonsten der WatchDog
Prescaler beim Verkürzen der Zeitspanne schon vorzeitig auslössen
könnte.
>Den Rest des Codes habe ich noch nicht verdaut.>Ich hab da immer Probleme mit so großen monolitischen Brocken, daher>unterteile ich gerne alles in kleine Häppchen. Auch wenn dann vielleicht>ein paar CALLs und RETs mehr an Code entstehen.
Ja verstehe ich. Der Bootloader sollte so kompakt wie möglich werden und
da sind Optimierungen über die einzelnen Blöcke hinaus manchmal
notwendig. Es ist schon blöde wenn wegen 2 Bytes zuviel an Code der
Bootloader eine ganze FLASH Page mehr benötigt.
>Dein Code ist ja auch äußerst sparsam kommentiert.>Die Umleitung des Bootloader-Reset bei den ATtinyxxx/ATmega48 machst Du>vermutlich schon in der EXE.
Ja, das ist aber auch abgesichert. Bei solchen AVRs wird erstmal der
letzte FLASH Block gelöscht. Dann die 1. Page Programmiert. Der
Bootloader arbeitet dabei immer mit einer CRC Prüfsumme beim Übertragen
der Befehle und den darauf folgenden Daten der 1. Page. Nachdem der
Bootloader die 1. Page programmiert hat wird auch immer gleich ein
Verify gemacht. Dh. das FLASHEN/Löschen von Pages und Schreiben in den
EEPROM enthält ein implizites Verify.
Benutzt man die Verschlüsselung so hat man sogar eine 64 Bit Prüfsumme
inkusive über den XTEA mit Doppel-CBC Modus. Wenn dabei nur 1 Bit falsch
sein sollte so propagiert sich dieser Bit Fehler durch alle
nachfolgenden Datenblöcke bis zum letzten Datenblock. Der letzte
Datenblock enthält eine 32 Bit Signatur (ersten 4 Bytes des Passwortes).
Ich hatte noch darüber nachgedacht per DEFINES zuschaltbar eine ähnlich
Vorgehensweise wie bei deinem Bootloader umzusetzen, aber so langsam
verbraucht das Projekt einfach zuviel Zeit. Es fragt sich wie
gering/hoch sind die Wahrscheinlichkeiten.
Das mit der Souceformatierung ist so'ne Sache, jeder hat da seine
Vorlieben. Ich mage es in gewisssen Projekttypen wenn ich nicht so viel
zersplitterte Sourcedateien habe da man so den Überblick hat. Das
Einlesen/Überblicken ist für Neulinge dann einfacher.
Gruß Hagen
Hallo Hagen,
hast Du vor Deine Delphi-Sourcen auch zu posten? Ich würde mir gerne mal
ansehen, wie Du die Übertragung der Dateien zu Kontroller realisiert
hast. Ich bin im Augenblick dabei ein kleines Programm zu entwickeln,
dass EEPROM-Inhalte an den Kontroller übertragen soll, aber irgendwie
bekomme ich das nicht vernünftig hin.
Gruß
Frank
Hallo Hagen,
ich wollte deinen bootloader auf einen m168 ausprobieren, aber leider
komme ich nicht zum Erfolg.
a) Hardware: habe einen FTDI232BM zwischen dem mega168 und USB hängen
der mega168 ist im 256word boot mode gefused.
b) SW
1
; copyright HR
2
3
.nolist
4
5
; supported devices
6
;.include "can128def.inc" ; AT90CAN128
7
;.include "can32def.inc" ; AT90CAN32
8
;.include "can64def.inc" ; AT90CAN64
9
;.include "m1280def.inc" ; ATmega1280
10
;.include "m1281def.inc" ; ATmega1281
11
;.include "m128def.inc" ; ATmega128
12
;.include "m161def.inc" ; ATmega161
13
;.include "m162def.inc" ; ATmega162
14
;.include "m163def.inc" ; ATmega163
15
;.include "m164Pdef.inc" ; ATmega164P
16
;.include "m165def.inc" ; ATmega165
17
;.include "m165Pdef.inc" ; ATmega165P
18
.include "m168def.inc" ; ATmega168
19
;.include "m168Pdef.inc" ; ATmega168P
20
;.include "m169def.inc" ; ATmega169
21
;.include "m169Pdef.inc" ; ATmega169P
22
;.include "m16def.inc" ; ATmega16
23
;.include "m2560def.inc" ; ATmega2560
24
;.include "m2561def.inc" ; ATmega2561
25
;.include "m323def.inc" ; ATmega323
26
;.include "m324Pdef.inc" ; ATmega324P
27
;.include "m3250def.inc" ; ATmega3250
28
;.include "m3250Pdef.inc" ; ATmega3250P
29
;.include "m325def.inc" ; ATmega325
30
;.include "m325Pdef.inc" ; ATmega325P
31
;.include "m3290def.inc" ; ATmega3290
32
;.include "m3290Pdef.inc" ; ATmega3290P
33
;.include "m329def.inc" ; ATmega329
34
;.include "m329Pdef.inc" ; ATmega329P
35
;.include "m32def.inc" ; ATmega32
36
;.include "m406def.inc" ; ATmega406
37
;.include "m48def.inc" ; ATmega48
38
;.include "m48Pdef.inc" ; ATmega48P
39
;.include "m640def.inc" ; ATmega640
40
;.include "m644def.inc" ; ATmega644
41
;.include "m644Pdef.inc" ; ATmega644P
42
;.include "m6450def.inc" ; ATmega6450
43
;.include "m645def.inc" ; ATmega645
44
;.include "m6490def.inc" ; ATmega6490
45
;.include "m649def.inc" ; ATmega649
46
;.include "m64def.inc" ; ATmega64
47
;.include "m8515def.inc" ; ATmega8515
48
;.include "m8535def.inc" ; ATmega8535
49
;.include "m88def.inc" ; ATmega88
50
;.include "m88Pdef.inc" ; ATmega88P
51
;.include "m8def.inc" ; ATmega8
52
;.include "pwm2Bdef.inc" ; AT90PWM2B
53
;.include "pwm2def.inc" ; AT90PWM2
54
;.include "pwm3Bdef.inc" ; AT90PWM3B
55
;.include "pwm3def.inc" ; AT90PWM3
56
;.include "tn13def.inc" ; ATtiny13
57
;.include "tn2313def.inc" ; ATtiny2313
58
;.include "tn24def.inc" ; ATtiny24
59
;.include "tn25def.inc" ; ATtiny25
60
;.include "tn261def.inc" ; ATtiny261
61
;.include "tn44def.inc" ; ATtiny44
62
;.include "tn45def.inc" ; ATtiny45
63
;.include "tn461def.inc" ; ATtiny461
64
;.include "tn84def.inc" ; ATtiny84
65
;.include "tn85def.inc" ; ATtiny85
66
;.include "tn861def.inc" ; ATtiny861
67
;.include "usb1286def.inc" ; AT90USB1286
68
;.include "usb1287def.inc" ; AT90USB1287
69
;.include "usb162def.inc" ; AT90USB162
70
;.include "usb646def.inc" ; AT90USB646
71
;.include "usb647def.inc" ; AT90USB647
72
; unsupported devices, no self programming or sram to small
73
;.include "1200def.inc" ; AT90S1200
74
;.include "2313def.inc" ; AT90S2313
75
;.include "2323def.inc" ; AT90S2323
76
;.include "2343def.inc" ; AT90S2343
77
;.include "4414def.inc" ; AT90S4414
78
;.include "4433def.inc" ; AT90S4433
79
;.include "4434def.inc" ; AT90S4434
80
;.include "8515def.inc" ; AT90S8515
81
;.include "8535def.inc" ; AT90S8535
82
;.include "AT86RF401def.inc" ; AT86RF401
83
;.include "m103def.inc" ; ATmega103
84
;.include "tn11def.inc" ; ATtiny11
85
;.include "tn12def.inc" ; ATtiny12
86
;.include "tn15def.inc" ; ATtiny15
87
;.include "tn22def.inc" ; ATtiny22
88
;.include "tn26def.inc" ; ATtiny26
89
;.include "tn28def.inc" ; ATtiny28
90
91
#message "compile for" __PART_NAME__
92
93
.ifndef PageSize
94
.error "Device don't support Bootloader !"
95
.else
96
97
98
99
.equ UseWDR = 0 ; set to 0/1 to de/activate WatchDog
100
.equ UseAutobaud = 1 ; set to 0/1 to de/activate Baudrate Detection
101
.equ UseVerify = 1 ; set to 0/1 to de/activate Verify FLASH Command, FLASH write/erase includes implicit verify, can be deactivated
102
.equ UseE2Write = 1 ; set to 0/1 to de/activate EEPROM Write Command
103
.equ UseE2Read = 1 ; set to 0/1 to de/activate EEPROM Read Command
104
.equ UseSRAM = 0 ; set to 0/1 to de/activate SRAM Commands
105
.equ UseCrypt = 0 ; set to 0/1 to de/activate cryptography
106
.equ UseCryptFLASH = 0 ; set to 0/1 to de/activate only use cryptography for writing to FLASH
107
.equ UseCryptE2 = 0 ; set to 0/1 to de/activate only use cryptography for writing to EEPROM
108
.equ UartInvert = 1 ; set to 1 to invert UART levels, for RS232 drivers such as MAX232
109
110
.equ RX_PORT = PORTD ; Receive Port and Pin
111
.equ RX = PD0
112
.equ TX_PORT = PORTD ; Transmit Port and Pin
113
.equ TX = PD1
114
115
.set XTAL = 14745600 ; only important for BootDelay if Autobaud is used
116
.set BootDelay = XTAL / 3 ; 300ms
117
.set BootBaudrate = 115200 ; only used if no Baudrate Detection activated, XTAL is important
118
.set BootVersion = 1 ; Version 1
119
.set BootCodeSize = 494 ; compile and set to value in [.cseg] Used, compile again
c) error Meldung im flash Windowsprogramm:
30.03.08-22:24:34-875 > Connecting...
30.03.08-22:24:34-968 > Switch to 2-Wire mode
30.03.08-22:24:39-328 > Device connected
30.03.08-22:24:39-359 > programming Device...
30.03.08-22:24:39-375 > execute compiled data
30.03.08-22:24:39-375 > selected options in compiled file:
30.03.08-22:24:39-375 > - programming FLASH
30.03.08-22:24:39-375 > - erase FLASH during programming
30.03.08-22:24:39-375 > - full verify FLASH after programing
30.03.08-22:24:39-375 > - programming EEPROM
30.03.08-22:24:39-546 > ICOM: read error.
30.03.08-22:24:39-578 > Device disconnected
hast du eine Idee?
Gut, das heist 90% der wichtigen Arbeit geht schonmal, er hat eine
2-Wire Verbindung erkannt und alle Device-Infos sind korrekt empfangen.
Ich habe die Timeouts sehr knapp bemessen. Bei den Zeiten für das
Programmieren des FLASHs und EEPROMs habe ich fast alle Datenblätter
duchwühlt und die maximalen Zeiten angenommen. Leider scheint es so zu
sein das manche AVRs längere Zeiten benötigen als im Datenblatt
angegeben.
Ich habe nun mal die wichtigsten Timeouts in der INI konfigurierbar
gemacht. In der Section [Timeouts] kannst du das einstellen. Erhöhe als
erstes den Timeout für Flash=25. Bis auf "Buffer" und "Base" Timeout
kann man eigentlich alle Timouts nach oben setzen ohne das sich was an
den Gesamtprogrammierzeiten verändern sollte. Der Timeout "Base" ist
speziell, normalerweise berechnet die Software den BaseTimeout nach der
eingestellten Baudrate, also den Timeout für 1 Zeichen bis es komplett
übertragen wurde. Mit dem Wert in "Base" kann man nun die minimale
Wartezeit für diesen Timeout einstellen. Bei hohen Baudraten kann also
der Timeout für 1 Zeichen unter zb. 25 Millisekunden betragen. Möchte
man das auf 25 ms limitieren dann stellt man dies in "Base=25" ein.
In AVRootloader.asm habe ich noch eine klitzekleine Verbesserung bei der
XTEA Entschlüsselung die uns 6 Bytes FLASH einspart eingebaut.
Desweiteren habe ich beim 2-Wire die Ansteuerung so verändert das der
RX-PIN mit Pullup arbeitet falls man beide PINs RX und TX auf den
gleichen Port gelegt hat.
Gruß Hagen
Ach übrigens, das Full Verify kannst du eigentlich immer abhacken. Die
FLASH löschen und schreiben und EEPROM schreiben Funktionen haben ein
implizites Verify integriert. Das zusätzliche Full Verify dient
eigentlich nur dazu um überprüfen zu können ob das schon geflashte
Program auf dem AVR mit dem aktuellen HEX File identisch ist.
Und da du noch par Bytes Platz hast empfehle ich dir die Watchdog
Unterstützung zu aktivieren. Der Watchdog wird damit nicht explizit
aktiviert aber falls du per WachtDog aus deiner Applikation in den
Bootloader springen möchtest oder generell den WatchDog eingeschaltet
hast dann ist das sehr hilfreich.
Ich benutz eigentlich zwei Arten um aus der Anwendung in den Bootloader
zu springen. Das ist sehr hilfreich beim Automatischen Programmieren des
AVRs. Bei den ATtinys überwache ich per PinChange ISR den RX Pin und
nutz eine ISR wie nachfolgende
1
// Pinchange ISR für PB6, bei LowLevel springen wir den Bootloader an
2
__attribute__((naked))ISR(PCINT_vect){
3
4
if(PINB&(1<<PB6)){
5
asmvolatile("reti");
6
}else{
7
asmvolatile("rjmp __vectors");
8
}
9
}
10
11
intmain(void){
12
13
MCUSR=0;
14
WDTCR=(1<<WDE)|(1<<WDCE);
15
WDTCR=0;
16
// RX Pin auf Eingang mit Pullup
17
DDRB=0;
18
PORTB=(1<<PB6)
19
// PinChange on PB6, Bootloader Pin
20
GIMSK=(1<<PCIE1);
21
PCMSK1=(1<<PCINT14);
22
sei();
23
24
..blabla
25
while(1){
26
}
27
}
Das hat den Vorteil das man die laufende Anwendung durch die PC-Software
automatisch in den Bootlaoder kommt. Da es ohne Watchdog per direktem
RJMP geht kann man über den SRAM Befehl der PC-Software den aktuellen
Inhalt des SRAMs und IO/PORT Bereiches auslesen und analysieren.
Ansonsten gehts auch über den WatchDog.
1
// Pinchange ISR für PB6, bei LowLevel springen wir den Bootloader an
Hallo Hagen,
super vielen Dank für dein schnelles update.
Ich habe deinen neuen Bootloader auf den mega168 mit gleichen settings
geflasht. Das flashen mit dem neuen Windows programm hat auf anhieb
geklappt. Ich brauchte keine weiteren timings anpacken. Baudrate war
256000b/s (FTDI chip).
Wollte dann rausfinden welches der minimum timeout Wert ist und bliebt
dann bei Flash=13 hängen. Alles über 13 war OK. Flash und Eeprom konnte
beides gleich gut geschrieben werden.
Mir ist allerdings aufgefallen, das ich das EEPROM nur mit max. 38400b/s
auslesen konnte ("EEPROM Content"). Hohere Baudratenwerte resultierten
zu einem "ICOM: read error". Auch ist unter "EEPROM Content" der "write
to devive" Button dekativiert, wenn ich ein externes *.eep file geladen
habe.
Bei "SRAM content" sieht es genau so aus. Leider nur bis 38400b/s ist
das auslesen möglich.
Crypted habe ich auch geflashed und hat auch geklappt. Einen minimalen
Geschwindigkeitunterschied habe ich bemerkt, aber dieser war klein 2,22s
zu 2,63sek bei 256000b/s.
...
Du hast zwar geschrieben, das der Bootloader so gut wie fertig ist, aber
ich würde trotzdem gerne paar kosmetische Wünsche äußern.
a)
Bei den folgenden settings brauche ich genau 514 bytes Bootcode size.
Kann man das vieleicht noch um 2 bytes drücken, damit es in die 256words
boot block passt? Gibt es da noch Optimierungsmöglichkeiten?
.equ UseWDR = 0
.equ UseAutobaud = 1
.equ UseVerify = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseSRAM = 1
.equ UseCrypt = 0
.equ UseCryptFLASH = 0
.equ UseCryptE2 = 0
.equ UartInvert = 1
b) eine Fortschrittsanzeige beim flashen wäre nett. Es wird zwar
"working" angezeigt und er hat 16kb in 2,2sek reingeflashed, aber wenn
ein Laufbalken keine Mühe machen würde, wäre das klasse.
vielen Dank für den tollen Loader + Windows Application. Großes
Dankeschön auch an Peter, der viel dazu beigetragen hat.
mfg.
chris
@Chris,
>Mir ist allerdings aufgefallen, das ich das EEPROM nur mit max. 38400b/s>auslesen konnte...
Erhöhe den Wert für [Timeouts] Buffer=10 oder Base=50.
Anbei mal die neuste Version. Ich habe das Fehlerhandling dahingehend
geändert das man sieht in welcher internen Funktion eine Exception
ausgelösst wurde. Das vereinfacht uns die Suche nach der richtigen
Stelle für die wir den Timeout anpasssen müssen. Leider ist es so das
Windows ganz unterschiedlich nach Treiber des Seriellen Gerätes die
Timeouts benötigt. Ohne Timeouts geht es nicht und mit zu großen
Timeouts verplempern die Gerätetreiber mehr Zeit als der Rest der Arbeit
kostet.
Teste es nochmal mit der neusten Version und sage mir was für eine
Fehlermeldung kommt. Dann kann ich dir genau sagen welchen Timeoutwert
wir erhöhen müssen.
>Crypted habe ich auch geflashed und hat auch geklappt. Einen minimalen>Geschwindigkeitunterschied habe ich bemerkt, aber dieser war klein 2,22s>zu 2,63sek bei 256000b/s.
Bei einem ATMega128 ist der Unterschied 16 sec. zu 22 sec. wobei der
ATMega mit 16Mhz läuft. Leider ist eben sichere Kryptography per
Software auf dem AVR immer aufwendig. Der XTEA ist da schon schnell im
Vergleich zu zb. DES oder AES. Man kann ungefähr 700 Takte pro Datenbyte
rechnen.
>Bei den folgenden settings brauche ich genau 514 bytes Bootcode size.>Kann man das vieleicht noch um 2 bytes drücken, damit es in die 256words>boot block passt? Gibt es da noch Optimierungsmöglichkeiten?
Kenn ich und mich nervt das dann auch sehr ;)
Du kannst UseVerify=0 setzen. Wie schonmal gesagt ist diese Option für
den Hobby-Betrieb meistens überflüssig. Alles an Datenübertragung ist
per 16Bit CRC abgesichert. Zuerst überträgt man 2 Bytes Kommandocode
dann darüber eine 2 Bytes CRC. Sollte also da schon ein Bitfehler
aufgetreten sein merkt das die Software schon frühzeitig. Bei den
Komandos du danach noch weitere Daten senden werden diese wiederum per
CRC abgesichert.
Nachdem man also einen FLASH/EEPROM Datenbuffer gesendet hat wird der
Befehl zum Schreiben der Daten in den FLASH/EEPROM gesendet. Beide
Fuktionen schreiben die Daten weg und verifizieren anschließend die
geschriebenen Daten, indem diese Funktionen den FLASH/EEPROM erneut
auslesen, mit den Daten im Buffer. Somit hat man schon ein implizites
Verify das sehr schnell geht da keine Daten erneut zum AVR gesendet
werden müssen. Die einzigste Schwachstelle an dem Konzept ist als die
CRC Prüfsumme über die empfangenen Daten. UU. kann es vorkommen das
mehrere Bitfehler gleichzeitg auftreten und die CRC Prüfsumme versagt.
Dann schreibt man quasi fehlerhafte Daten in den FLASH und das implizite
Verify merkt davon nichts. Bei meinen Test mit absichtlich schlecht
gewählten Baudraten und somit ständigen Fehlern hat der AVR nicht ein
einzigstes Mal den Datenübertragungsfehler nicht bemerkt. Bei meinen
Test war nur eine Baudrate von 256000 kritisch (bei 16Mhz Takt mit
interner PLL und RC-Oszi auf ATtiny461). Im Besonderen ist das Lesen von
Daten vom AVR bei 256000 Baud kritisch. Die interne Zeitschleife ist
dann sehr kurz und benötigt bei 16Mhz nur 33 Takte.
Ich würde dir also raten wieder auf 128000/115200 Baud runter zu gehen.
Wenn du das mal genauer analysierst (also die Programmierzeiten) so
wirst du feststellen das die USB-RS232-Treiber keinen großen
Geschwindigkeitsvorteile bringen. Bei mir ist es sogar so das eine
normale COM-Schnitstelle bei 115200 leicht schneller ist als ein
USB-RS232-Dongle bei 256000. Davon mal abgesehen, erzeugt dieser
USB-RS232 Treiber auf meinem System bei dieser Baudrate sporadisch einen
Bluescreen (das sind die einzigsten Bluescreens die ich seit Jahren
gesehen habe auf meinem System!)
Ansonsten könntest du UseAutobaud=0 setzen, du benutzt ja einen externen
Quarz.
Oder du verkürzt BootSign: db. "BOOT" auf zb. "BT". Dann gehst du in
AVRootloader.INI und ändert in [System] Sign=BT um.
Was anderes fällt mir nicht ein, es gibt aus meiner Sicht keine anderen
Möglichkeiten des Code noch kürzer zu machen ohne das man was an der
Funktionalität verändert.
>b) eine Fortschrittsanzeige beim flashen wäre nett. Es wird zwar>"working" angezeigt und er hat 16kb in 2,2sek reingeflashed, aber wenn>ein Laufbalken keine Mühe machen würde, wäre das klasse.
Nicht so einfach möglich, auf Grund des Datenkonzeptes schon. Denn wenn
wir mit verschlüsselten Daten arbeiten dann wird alles in eine binäre
"Scriptdatei" compiliert, passiert auch bei unverschlüsselten Daten,
aber die Verschlüsselung war der Grund für diese Scriptdateien. Eine
solche Scriptdatei ist quasi eine Liste aller Befehle + Daten die an den
AVR gesendet werden. Vorteil ist eben das ich das als Basis für weitere
Features benutzen wollte, zb. man kann extern solche Scripte erzeugen
und durch meine Software ausführen lassen.
Nun das verschlüsselte Format verschlüsselt nicht nur die Daten und ihre
wahre Größe sondern auch die Addresen an die diese Daten geflasht werden
sollen. Da meine Sofwtare beim Erzeugen solcher Dateien auch "Lücken" im
FLASH die nur mit 0xFF gefüllt werden erkennt und entfernt (dh. es
werden nur Pages programmiert die nicht vollständig mit 0xFF gefüllt
sind, solche Pages werden per Erasekommando nur gelöscht).
Es gibt also konzeptionell gesehen keine so einfache Möglichkeit einen
Fortschrittsbalken zu bauen, bzw. wenn dann würde er eher nach der
Anzahl der Befehle funktionieren und keinen zeitlichen Zusammenhang zur
Gesamtdauer der Befehle enthalten.
Ich denke mal drüber nach, aber dann kann es nur so sein das ich die
Anzahl der abzuarbeitende Befehle/Kommandos dafür benutze.
>Auch ist unter "EEPROM Content" der "write>to devive" Button dekativiert, wenn ich ein externes *.eep file geladen>habe.
Hm geht schon nur gewusst wie ;) Ich habe diesen "Fehler" aber in obiger
Version beseitigt. Normalerweise ist es nämlich so das du im HEX Editor
Daten veränderst. Diese werden rot markiert dargestellt. Im
EEPROM-HEX-Editor kannst du per rechten Mausklick ein Popupmenu öffen
mit dem du diese Selektion auch selber setzen kannst. Markiere einfach
mal im EEPROM die Addressen 0x0000 bis 0x001F. Dann Rechten Mausklick
und im Popup "Select Cells" auswählen. Wenn du nun "Write to Device"
oder "Save to File" anklickst so werden nur diese ausgewählten Zellen
programmiert bzw. gespeichert. Alle anderen nicht markierten Zellen
werden im AVR nicht verändert. Lange Rede kurzer Sinn: Man kann also von
einem AVR den EEPROM auslesen. Dann markiert/editiert man nur einen
ausgewählten Bereich davon und speichert das in eine EEP Datei. Nun
wählt man diese EEP Datei samt HEX Datei für den FLASH auf der 1. Page
der Sofwtare. Dann drückt man "Copile" und erzeugt eine ACY-Datei. Wird
diese Datei ausgeführt dann werden nur die EEPROM Zellen programmiert
die man vorher manuell ausgewählt hat.
Sinn ist es das man selektive Konfigurationen in das EEPROM schreiben
kann.
In der neusten Version wird wenn nichts in den HEX-Editoren selektiert
ist alles geschrieben. Beim SRAM Content aber nur der SRAM Bereich. Das
violette Registerfile und der grüne IO-Bereich wird nicht geschrieben.
Den IO-Bereich musst du also weiterhin explizit editieren.
>vielen Dank für den tollen Loader + Windows Application. Großes>Dankeschön auch an Peter, der viel dazu beigetragen hat.
Ja dem schließe ich mich an, habe viel gelernt.
Gruß Hagen
Hallo Hagen,
deine ausführlichen Antworten sind wirklich bemerkenswert. Du steckst ne
menge Zeit da rein, aber ich denke ich habe nun alles soweit hinbekommen
und verstanden.
>Erhöhe den Wert für [Timeouts] Buffer=10 oder Base=50.>Anbei mal die neuste Version. Ich habe das Fehlerhandling dahingehend>geändert das man sieht in welcher internen Funktion eine Exception>ausgelösst wurde.
Deine neue Windows Applikation gibt mir folgende Meldung aus, wenn Base
auf 25 steht.
Connecting...
31.03.08-21:48:09-064 > Switch to 2-Wire mode
31.03.08-21:48:09-846 > Device connected
31.03.08-21:48:09-877 > read EEPROM...
31.03.08-21:48:09-908 > CmdReadEeprom.ReadByte(1) ICOM: read error.
31.03.08-21:48:09-924 > Device disconnected
Durch Erhöhung des Wertes auf 50 funktioniert es gut. Es gibt keine
Fehlermeldung mehr. Allerdings auch genau ab 50, Werte <50 resultieren
im oben genannten Fehler. Dies habe ich bis max. Baudrate getestet.
>>Bei den folgenden settings brauche ich genau 514 bytes Bootcode size.>>Kann man das vieleicht noch um 2 bytes drücken, damit es in die 256words>>boot block passt? Gibt es da noch Optimierungsmöglichkeiten?>Kenn ich und mich nervt das dann auch sehr ;)>Du kannst UseVerify=0 setzen.
Ja, du hast recht. Sieht so aus, das der "normale" flashvorgang reicht
um eine recht hohe Fhashwahrscheinlichkeit zu erreichen.
Das verkürzen des Boot sign von "BOOT" auf "BT" würde in meinem Fall
wirklich helfen, wow. :) Wenn dieses keine weiteren Auswirkungen hat,
würde ich jetzt einfach mal dauerhaft bei mir so einstellen.
>>b) eine Fortschrittsanzeige beim flashen wäre nett. Es wird zwar>>"working" angezeigt und er hat 16kb in 2,2sek reingeflashed, aber wenn>>ein Laufbalken keine Mühe machen würde, wäre das klasse.>Nicht so einfach möglich, auf Grund des Datenkonzeptes schon.
Das ist absolut kein Thema. Sowas ist auch wirklich nur "nice to have".
Es gibt ja ein feedback im Protocol was einem anzeigt ob alles geklappt
hat.
>>Auch ist unter "EEPROM Content" der "write>>to devive" Button dekativiert, wenn ich ein externes *.eep file geladen>>habe.>Hm geht schon nur gewusst wie ;) Ich habe diesen "Fehler" aber in obiger>Version beseitigt. Normalerweise ist es nämlich so das du im HEX Editor>Daten veränderst. Diese werden rot markiert dargestellt.
ja, ich habe mittlerweile auch rausgefunden, wie man den Editor richtig
bedient. :) trotzdem sehr hilfreich das man jetzt ohne Änderung des
Inhaltes sofort die EEPROM Inhalt schreiebn kann. Sowas brauche ich
recht regelmäßig da ich ein Parameterimage im EEPROm ablege.
vielen Dank und ich hoffe das dies auch anderen Leuten geholfen hat.
cu
chris
>Das verkürzen des Boot sign von "BOOT" auf "BT" würde in meinem Fall>wirklich helfen, wow. :)
Kürzer geht halt nicht mehr, es sollten also mindestens 2 Zeichen sein
und der komplette String sollte eine gerade Anzahl an Zeichen haben.
Dieser String dient einerseits als Identifier/Passwort, andererseits
auch zum "Testen" der Verbindung. Wenn es also möglich ist sollte der
String schon länger sein da so Übertragungsfehler auf Grund einer leicht
daneben liegenden Auto-Baudrate besser erkannt werden.
>Durch Erhöhung des Wertes auf 50 funktioniert es gut. Es gibt keine>Fehlermeldung mehr. Allerdings auch genau ab 50, Werte <50 resultieren>im oben genannten Fehler. Dies habe ich bis max. Baudrate getestet.
Das deutet auf schon oben genanntes Verhalten der verschiedenen
RS232-USB-Treiber hin. Normalerweise benötigt der AVR maximal 10 Takte
bis er anfängt die ersten Datenbytes aus dem EEPROM an den PC zu senden.
Also niemals 50ms an Zeit. Der Timeout entsteht beim ersten zu
empfangenden Datenbyte beim Auslesen des EEPROMs, gleich nach dem Senden
der 2 Kommandobytes + 2 Bytes CRC. Sowas kann nur passieren weil der
USB-RS232-Treiber oder das USB-Hardware-Protokoll Zeitverzögerungen
einbaut.
Du solltest also in deinem Falle den Timeout "Base" immer auf minimal
50ms stehen lassen, denn bei deiner Hardware/Treiber kommen quasi 50 +
1000000/Baudrate * Datenbytes Zeitverzögerung raus. Rechnet man das
Verhältnis aus so sieht man das dise 50ms weit über der Zeit liegen die
man für ganze Datenpackete ansich benötigen würde. Deshalb nutz ich die
gute alte UART meines Laptops ;)
Eventuell müsstest du auch "Buffer" auf 50ms setzen, aber das erhöht
drastisch die Programmierzeiten !
Vielleicht findest du ja einen Dreh wie man den USB-RS232-Treiber dazu
überedet mit kürzeren Zeitverzögerungen zu arbeiten.
Ich arbeite zZ. mit
Base=25
Erase=5
Flash=10
Eeprom=10
Buffer=1
und normaler UART bei 115200 Baud ohne Probleme.
Gruß hagen
Hier die neuste Version, geändert wurden:
- Anleitung zur Benutzung der Verschlüsselung und der prekompilierten
ACY- Dateien beigefügt
- Wenn AVRootloader.exe eine Verbindung herstellen möchte so zieht er
den DTR-Pin der RS232 auf High-Pegel. Damit kann man über DTR eine
Stromversorgung zb. eines Treibers machen, aber bitte RS232
Spezifikationen beachten
- unter Win2k/Win95 wurde das Fenster der AVRootloade.exe nicht in den
Vordergund geholt. Stattdessen blinkte nur das Icon in der Tastleiste.
Dieses Problem wurde behoben (ist aber auch Standardverhalten auf diesen
Windowsversionen)
- Darstellungsprobleme im SRAM-Content HEX-Editor beseitigt
- mit rechten Mausklick in diese HEX-Editoren öffnet sich ein Popup-Menu
mit dem man zb. selektierte Zellen im Editor rot markieren kann. Beim
Zurückschreiben in den AVR oder beim Speichern in eine Datei werden dann
nur diese selektierten Zellen berücksichtigt. Mit diesem Feature kann
man zb. selektive EEPROM Dateien erzeugen die nur ausgeählte
Speicheraddressen schreiben.
- die AVR Device Liste in AVRootloader.asm (.includes) wurde auf den
neusten Stand gebracht
- die Datei AVRootloader.dev wurde ebenfalls auf den neusten Stand
gebracht, möchte man diese neu erzeugen lassen so muß AVRStudio im
System korrekt installiert sein. Löscht die aktuelle AVRootloader.dev
Datei und startet die Anwendung. Aus den XML Part Description Files des
AVR Studios wird dann eine neue AVRootloader.dev erzeugt.
- Howto für selektive EEPROM Updates hinzugefügt
Gruß Hagen
Leider war noch ein Fehler drinnen, ich hasse das wenn man unter
Zeitdruck arbeitet.
Die Funktion "make Password" veränderte die Formatierung des Passwortes
in der AVRootloader.asm und in der AVRootloader.ini falsch. Jetzt ist's
richtig ;)
Danke an Wolfgang der mich darauf aufmerksam gemacht hat.
Gruß Hagen
@Hagen
Mal 'ne einfache Frage, ich überlege schon seit Tagen, wofür man einen
Bootloader mit Verschlüsselung benötigt. Wer soll da wo Daten klauen und
vor allem wie?
Wäre froh, wenn Du mir das erklärst, damit ich wieder schlafen kann ;-)
@ Neugieriger
Z.Bsp. wenn du mehrere Geraete im Umlauf hast und bei einer
Programaenderung nicht selbst von Standort zu Standort wandern und diese
updaten willst.
@Hagen Re
Danke für Dein Programm. Werde es in meiner naechsten grösseren Serie
mal einsetzen.
Ja ich weiß.
Ich habe aber eine Anwendung wo ich bis zu 10 Controller parallel
betreiben will. Diese laufen alle mit der gleichen software. Ist nur
blöd immer jeden einzeln zu programmieren. Vielleicht hat jemand ja eine
Idee.
Möglich ist sowas aber nicht mit dem Bootloader wie er jetzt ist,
vielleicht sogar ja doch. Wenn alle AVR Bootloader als BootSign: einen
anderen Wert hätten, zb. AVR1 hat "BOOT1" AVR2 hat "BOOT2" usw. Alle
liegen sie per 1-Wire auf dem gleichen Bus und die 1-Wire-RS232 wäre der
Master. Dann könnte eine Point-to-Point Kommunikation von mehreren
Geräten quasi im Halb-Duplex funktionieren, eben so wie auf einem
1-Wire-Bus. Die PC-Software müsste dann nacheinander erst die Signatur
"BOOT1" senden und warten bis sich der entsprechende AVR meldet. Dann
wird dieser Programmiert, danach sendet der PC nun "BOOT2" und verbindet
mit AVR2 usw. usw.
Gruß Hagen
Ich hatte an etwas ähnliches gedacht.
Komfortabler wäre es doch wenn mann in der Windows Software die Anzahl
der Controller angeben könnte, damit die Windows Software dann je nach
Anzahl der Controller, nacheinander die Abfrage tätigt (also z.B.
BOOT1,BOOT2..) Alle Controller lauschen auf der RX Leitung und
aktivieren den TX Zweig zum Antworten nur wenn sie gefragt werden.
Danach deaktivieren sie diesen wieder. Wenn die Windows Software alle
Antworten gesammelt hat kann die Programmierung ja parallel laufen. Oder
ist solches nicht möglich?
Damit müssen doch die Bootloader wieder unterschiedlich sein. Im
zweifelsfall reicht es ja vielleicht unterschiedliche Passwörter zu
nehmen. Es reagiert dann jeweils nur der Controller, wo das Passwort
passt.
Hardwaremäßig ist es am einfachsten im 1-Wire-Modus zu arbeiten, das
geht ohne Umprogrammierung der Software (AVR-Bootloader) jetzt schon.
Das BootSign: aktuell der Wert "BOOT" ist das was du unter Passwort
verstehst. Das lässt sich in der PC-Software in AVRootloader.ini jetzt
schon ändern.
Man müsste die PC-Software so umprogrammmieren das sie diesen Wert
autom. inkrementiert.
Allerdings ist es schon richtig das man bei diesem Verfahren die
AVRootloader.asm individuell programmieren müsste.
Vorstellbar wäre es diese Software so zu erweitern das eine Serialnummer
im EEPROM abgelegt wird. Am Anfang installiert man auf den AVR diese
Software und programmiert diese Serialnummer individuell, also immer nur
ein AVR an der 1-Wire Hardware angeschlossen. Nach diesem Setup kann man
alle AVRs parallel am 1-Wire hängen. Die PC Software fragt nun wie beim
Original-1-Wire diese Serialnummer=ID ab und ermittelt auf diese Weise
alle AVRs die am 1-Wire-Bus hängen. Danach kann man per PC-Software
selektiv all Geräte flashen oder eben eine Auswahl oder alle in einem
Rutsch sequientiell nacheinander.
Gruß Hagen
Wenn man sich die Anforderung von James ansieht und daraus ableitet,
welcher Aufwand schon beim Programmieren der einzelnen Bootloader zu
betreiben wäre, oder den Aufwand, der seitens Hagen notwendig wäre, dann
würde ich mal ein back-to-the-roots anregen.
Warum nicht einfach ein Lötpad in der Nähe eines jeden Controllers und
diesen mal kurz mit einer Prüfspitze berühren. Parallel dazu einen
Taster, der die Betriebsspannung aus-einschaltet und fertig, oder
einfach den Pin vom Controller aus überwachen, so wie Hagen es oben
dargestellt hat.
Das geht doch ratz-fatz...
Ich fände es gut, wenn die Windowssoftware noch ein "simples" Terminal
Program mitbringen würde. Da ich über dieselbe serielle Schnittstelle
programiere wie die, auf der ich Statusmeldungen ausgebe fände ich es
gut, wenn das in einer Software wäre.
Was hälst du davon?
Werner
Hatte ich auch schon dran gedacht aber es stellt sich die entscheidende
Frage wie solls gehen ? Der Bootloader sollte primär vollkomman
unabhängig zur eigentlichen Anwendungssofwtare sein. Die PC-Software
wäre demnach eine Kombination aus Bootloader-Software für den
AVR-Bootloader und Terminal-Software für die Anwendung. Soweit
unproblematisch wenn dieses Terminal vollkommen separat funktioniert.
Dh. also eigener Verbindungsaufbau usw. da ja nicht mit dem Bootloader
connected wird sondern mit der installierten Anwendung. Die Anwendung im
AVR muß also selber die UART Kommunikation machen unabhängig vom
Bootloader.
Dazu hatte ich angedacht eine 1-Wire Bibliothek die per Interrupts
arbeitet vorzusehen die man dann in die eigene Anwendung einbinden
könnte. Nur die liebe Zeit ist das Problem. Ich programmiere in meiner
Freizeit nur Dinge die ich auch selber benötige, verständlich oder ?
Wenn also irgendeiner eine solch fertige Library mir anbietet dann bin
ich gerne bereit meine PC-Software dahingehend anzupassen. Das ist im
Grunde kein großer Aufwand.
Ich habe mir auch schon AVR309 (IgorPlug-USB) angeschaut und als
untauglich verworfen da dort keine Kommunikationstimeouts unterstützt
werden die aber für das Bootloaderprotokoll essentiell sind.
>Da ich über dieselbe serielle Schnittstelle>programiere wie die, auf der ich Statusmeldungen ausgebe fände ich es>gut, wenn das in einer Software wäre.
Siehst du, Du machst es so. Ich zb. habe am gleichen 1-Wire-Pin
normalerweise eine LED, also Ausgang dran, im aktuellen Projekt.
Wenn sich bei mir also der Bedarf nach so einer Schnittstelle andeutet
würde ich das auch in die gleiche PC-Software integrieren, logisch.
Gruß Hagen
Ich arbeite mit den "normalen" Uart-Routinen aus meinem Hauptprogramm.
Da ich "genügend" I/O habe benutze ich auch den 2-Draht Modus.
Aber schön zu hören, dass das vielleicht noch kommt ;-)
Wenn ich das richtig verstanden habe, ist der normale Ablauf doch wie
folgt
- PC Software starten
- Connect to device
- AVR einschalten bzw. resetten
- PC Software connected
- danach kann ich programmieren
Manchmal habe ich nun, dass die PC Software zwar in den connected Modus
wechselt, aber die alte Anwendung auf dem AVR trotzdem gestartet wird.
Dann kann ich natürlich nicht programmieren.
Würde es hierbei etwas bringen, die Wartezeit des Bootloader
hochzusetzten, oder was läuft hier schief?
Werner
Ja, Wartezeit hochsetzen. Die PC-Software sendet beim Connect (egal ob
manuell mit Connect-Button ausgelösst oder durch Button
"Program"/"Erase" etc.pp. automatisch ausgelösst) permanent ein
#0#0#0#0#13BOOT. #0#0#0#0 steht für Kommando "Restart Bootloader", #13
ist das Zeichen für die AutoBaud Funktion und "BOOT" das Passwort/die
Signature. Das Interval dieses Packetes definiert sich über die
Baudrate, je höher die Baudrate desto höher kann das
Wiederholungsinterval werden. Der AVR-Bootloader versucht nun innerhalb
von zb. 300ms (default und fix) darauf zu reagieren. Nun kann es
vorkommen das das Timing so ungünstig ist das sich diese Intervalle auf
eine Art überschneiden das keinerlei Connect möglich ist. Dann einfach
nochmal RESET/POWER OFF drücken. Oder aber in der Applikation so wie
oben schon angedeutet auf Pegelwechsel am RX-PIN reagieren. Dann würde
die Applikation solange in den Bootloader springen bis die PC-Software
aufhört irgendwas zu senden. In diesem Falle kann man das BootDelay im
AVR-Bootloader als defakto deaktiviert ansehen und die PC-Software
steuert den AVR fern.
Alternativ könnte ich das BootDelay so abändern das nicht exakt x
Milliskunden im Gesamten gewartet wird, also fester Timeout, sondern das
wenn nach x Millisekunden rein garnichts passiert ist ein Timeout
entsteht. D.h. würde das BootDelay zb. auf 300ms stehen und nach 200ms
kommt irgendein Impuls auf Rx rein so verlängert sich das Delay um
weitere 300ms. Somit würde der Bootloader solange im Delay bleiben bis
entweder eine gültige Verbindung zustande kam (Bootloader startet) oder
aber die PC-Software für mindestens 300ms Ruhe gibt (Applikation
startet). Ist also keine PC-Software aktiv so startet die Applikation
nach 300ms, ist eine PC-Software aktiv so läuft der Connect-Prozess so
lange bis die PC-Software "aufgibt" und 300ms später startet die
Applikation, oder es aber zu einer gültigen Verbindung kommt (nochmal in
anderen Worten;).
Solche Probleme lassen sich nur dann umgehen wenn man zusätzliche
Steuerleitungen mit diesen Funktionen vorsieht. Eine Möglichkeit habe
ich jetzt schon integriert. Der DTR Ausgang der RS232 wird beim Beginn
eines Connects in der PC-Software auf HIGH-Peel gezogen (ist
normalerweise -12 bzw. -6 oder sogar 0 Volt, je nach RS232 Hardware).
Man könnte also den DTR über eine Shottky wie beim 1-Wire an einen Pin
des AVRs legen. DTR wird momentan so geschaltet damit man aus diesem Pin
quasi eine Spannungsversorgung eines Pegelwandlers (2x Transistor)
aufbauen kann.
Ich hatte auch schon vorgesehen das der RTS Pin ebenfalls kurzeitigt
seinen Pegel verändert, von HIGH auf LOW und wieder HIGH. Über eine
Shottky wie beim 1-Wire direkt an den RESET des AVRs. Die PC-Software
pulst diesen Pin nun vor jedem Connect-Versuch. Habe ich aber wieder
rausgenommen und kann wenn gewünscht wieder eingebaut werden.
Aber genau der Punkt das man auch nur mit wenigen Kabeln arbeiten kann
ist primäres Ziel gewesen bei diesem Bootloader ;)
Gruß Hagen
Hallo Hagen,
ich wollte jetzt mal auch Deine tollen Bootloader benutzen,
an einem ATMEGA162,
nachdem ich n halben Tag gesucht habe und endlich gefunden hab,
das ich ja n MAX232 davorgeschaltet habe und natürlich dann:
.equ UartInvert = 1
setzen muß, bin ich jetzt ein Stück weiter,
Aber leider funktioniert das Programmieren nicht:
18.04.08-18:02:02-958 > Switch to 2-Wire mode
18.04.08-18:02:03-083 > Device connected
18.04.08-18:02:04-833 > programming Device...
18.04.08-18:02:04-833 > execute compiled data
18.04.08-18:02:04-833 > selected options in compiled file:
18.04.08-18:02:04-833 > - programming FLASH
18.04.08-18:02:04-942 > CmdFlash.ResCheck() Error: Verify failed
Ich hab schon verschiedene Baudraten und Timeouts probiert, daran schein
es nicht zu liegen.
Hast Du evtl. n Tip ?
Die Idee mit dem Terminal ist mir auch gleich aufgefallen, ich hab hier
ZOC in Verwendung, und wenn das gestartet ist kommt die AVRootloader.exe
nicht mehr an die COM, also Programm beenden, AVRootloader.exe aufrufen,
programmieren, usw.,
Ne integrierte Lösung wär schon nicht schlecht,
muß ja kein ausgewachsenes Terminal sein, nur Ein- und Ausgaben.
Da ich meißtens ein CommandLineInterface in meine größeren AVRs
integriere wäre das echt hilfreich.
Danke und Grüße,
Micha
Hm, das sieht übel aus. Es bedeutet das dein AVR kaputt geflasht ist.
Mal davon abgesehen das auch ein Fehler im Bootloader voehanden sein
könnte ;)
Nach dem Programmieren einer FLASH Page wird der FLASH sofort wieder
ausgelesen und mit den soeben programmierten Daten im SRAM Buffer
verglichen. Sollte es dabei zu einer Inkonsistenz kommen wird der Fehler
"Verify failed" zurückgeliefert. Also schlägt bei dir das implizite
Verify zu und meint das dein FLASH nicht sauber programmiert werden
kann. Gehen wir davon aus das der Bootloader keinen Fehler macht, deine
Hardware ansonsten sauber ist (keine Spannungseinbrüche in der
Versorgung zb.) dann heist dies das dein AVR defekt ist.
Wenn du den ISP noch dran hast dann solltest du erstmal versuchen deinen
AVR damit zu flashen. Es sollte dann ebenfalls ein Verify Fehler
auftreten. Dann wäre dein AVR FLASH definitiv kaputt. Am besten flasht
du alle Zellen einmal auf 0x00 und einmal auf 0xFF um sicher zu gehen.
Wenn kein Verify Fehler per ISP auftritt dann muß ein Fehler im
Bootloader vorliegen, kann aber beim besten Willen nicht sagen was dort
falsch sein sollte.
>Die Idee mit dem Terminal ist mir auch gleich aufgefallen, ich hab hier>ZOC in Verwendung, und wenn das gestartet ist kommt die AVRootloader.exe>nicht mehr an die COM, also Programm beenden, AVRootloader.exe aufrufen,>programmieren, usw.,
Ja ich weiß :) Ich hatte als ich began mit dem Bootloader schon die
gleiche Idee aber immer wieder verworfen. Es ist eben eine Bootlaoder
Software und keine Applikationsbezogene Software. Ich denke nochmal
drüber nach verspeche aber nichts, es stehen erstmal andere Änderungen
an.
1.) die Funktionalität des Bootloaders wird in ein Interface gepackt.
Die Funktionalität der Kommunikationsschnittstelle (bisher COM-Port) ist
schon längst in einem solchen Interface. Das Ganze kommt in eine DLL.
Nun kann man mit allen Standard-Programmiersprachen für Windows die
Interfaces, also COM, DCOM unterstützen auf diese Interfaces der DLL
zugreifen. Somit ist die komplette Bootloader Funktionalität auch aus
eigenen Programmen heraus nutzbar. Man kann so auf einfache Weise
entweder das Kommunikations-Interface durch ein egenes ersetzen, zb.
direkter USB Treiber, AVR309 wenn man möchte etc.pp. Oder man kann
eigene Befehle die man in den AVR-Bootloader integriert hat mit dem
Bootloader Interface erweitern.
2.) es wird eine PIN geben. In den ersten par EEPROM Zellen des AVRs
kann in Zukunft eine PIN programmiert werden. Der Bootloader bekommt ein
neues Kommando bei dem man diese PIN dem Bootloader mitteilen muß damit
er alle anderen Kommandos überhaupt akzeptiert. So kann man jeden AVR
individuell mit dieser PIN schützen. Kann sie nach Eingabe der PIN über
das EEPROM Kommando neu schreiben oder löschen. Statt PIN könnte man
sagen Serialnummer die als programmierbares Passwort benutzt wird.
Damit gibt es also insgesamt drei verschiedene Schutzmaßnahmen die der
Bootloader unterstützt. Das BootSign -> "BOOT" das als harcoded Passwort
für alle AVRs mit gleichem Bootloader dienen kann. Die PIN die im EEPROM
individuell für jeden AVR programmiert werden kann, zb. auch durch die
Endkunden. Und schlußendlich die Verschlüsselung samt 128 Bit Passwort
um Fernupdates gesichert durchführen zu können. Natürlich ist die
Unterstützung einer solchen PIN ebenfalls konfigurierbar.
3.) das Verfahren des Boot Timeouts wird leicht geändert.
4.) Vieleicht, aber nur vieleicht ! Ein Standalone Bootloader für den
PC. Mit der jetzigen PC Software würde man dann eine eigene EXE
kompilieren die die verschlüsselte ACY-Datei (HEX für FLASH/EEPROM)
enthält. Das GUI dieser Anwendung würde wie ein Setup-Assistent
aussehen, die automatische Ermittlung der Schnittstelle enthalten und
auch autom. die eingebundene ACY-Datei flashen.
Gruß Hagen
Hallo Hagen,
Danke für Deine schnelle und ausführliche Antwort,
da können wir ja noch einiges erwarten von Deinem Projekt, :-)
die Idee mit der DLL ist sehr gut, da ich nämlich hier schon ein
Sourceproject für ein Terminal-programm habe, allerdings in C,
aber vielleicht kann man dann beide irgendwie verheiraten, :-))
bzgl. meinem AVR, gottseidank hatte ich noch den ISP dran,
war ja noch am Bootloader-basteln,
also das Programmieren/Verify über ISP funktioniert stabil und
problemlos,
sowohl alles FFFF (kriegt man ja durch erase schnell hin :-)), als auch
alles 0000, oder die Applikation selbst, wie gesagt über ISP ist alles
ok.
still any ideas ?? :-))
Grüße,
Michae
Uff. Versorgt der ISP den AVR mit Spannung ? Das Problem was ich sehe
ist das die Routine die den FLASH programmiert ihre Daten aus dem SRAM
bekommt. Damit wird der Pagebuffer befüllt und anschließend der Program
Befehl ausgeführt. Danach lädt der AVR nochmal die soeben programmierten
Zellen aus dem FLASH und vergleicht sie mit den Daten im SRAM. Es gibt
also nur 4 Möglichkeiten wo ein Fehler passieren kann.
1.) FLASH Programmierung, dh. dein FLASH ist wirklich defekt oder kann
nicht sauber programmiert werden weil deine Spannungsversorgung schlecht
ist
2.) SRAM Daten verändern sich willkürlich zwischen der
FLASH-Programierphase und FLASH Verifyphase. Auch das könnte an einer
Spannungsversorgung liegen
3.) meine Software im AVR hat an dieser Stelle noch einen Bug. Das halte
ich aber für unwahrscheinlich, ich hatte bisher noch nie einen solchen
Verify Fehler selbst mit einem Projekt bei dem die Spannungsversorgung
sehr heikel ist (Solar-Panel -> 1.2V NiMH Akku -> Stepup auf 3.0 Volt).
4.) Datenübertragung, dh. alles läuft im AVR korrekt ab, am Ende wird
der Returncode SUCCESS gesendet aber als ERRORVERIFY empfangen. Das ist
aber enorm unwahrscheinlich da diese Fehlercodes sich im oberen Nibble
komplett unterscheiden -> $3x -> $Cx.
Wie gesagt bisher hatte ich bei meinen Projekten (ATtiny45, ATtiny461,
ATmega168) keinerlei Probleme.
Mache mal folgendes:
1.) AVRootloader.asm -> UseSRAM = 1, UseE2Read=1, UseE2Write=1 setzen,
neu compilieren und installieren, WICHTIG! vergiß nicht BootCodeSize=???
anzupassen so wie es in der Readme steht.
2.) AVRootloader.exe starten und über Button "Connect to device" eine
Verbindung herstellen
3.) auf Page "Device Information" überprüfen ob alle Angaben mit deinem
AVR übereinstimmen
4.) auf Page "SRAM Content" gehen und Button "Read from Device" drücken
5.) in dem grünen Bereich des HEX Editor gehen und rechten Mausklick
machen, im Popup "Clear Cells" drücken
6.) auf Button "Write to device" klicken
7.) auf Button "Read from device" klicken und schauen ob alle Zellen im
grünen Bereich weiterhin auf 0x00 stehen (bis auf die letzten par Bytes
-> Stack)
8.) nun alle Zellen im grünen Bereich auf 0xFF setzen und Steps 6.-7.
wiederholen
Du musst dann immer exakt das wieder aus dem SRAM auslesen was du vorher
dort hineingeschrieben hast. Sollte das nicht der Fall sein so hast du
ein Kommunikationsproblem, zb. mit dem MAX-Treiber.
Die gleichen Tests kannst du auch mit dem EEPROM machen -> Page "EEPROM
Content". Hier wird wie beim FLASH ebenfalls das implizite Verify
durchgeführt.
Gruß Hagen
>die Idee mit der DLL ist sehr gut, da ich nämlich hier schon ein>Sourceproject für ein Terminal-programm habe, allerdings in C,>aber vielleicht kann man dann beide irgendwie verheiraten, :-))
Ich möchte keine falschen Erwartungen wecken. zZ. verifiziere ich
erstmal ob mein angedachtes Konzept auch funktioniert. Ich werde mit
Interfaces arbeiten und das in deiner DLL. Alle Programmiersprachen die
Windows-COM-Interfaces unterstützen können dann darauf zugreifen (also
keine IDispatch-Interfaces!) Das unterscheidet sich zu einer normalen
DLL gewaltig da meine DLL quasi nur ein Objekt exportiert und keine
Funktionen. Jeder der sich mit Interfaces auskennt weiß welche Vorteile
das hat es bedeutet aber auch das diese DLL eher wie ein OCX/ActiveX
funktioniert statt wie eine normale DLL mit exportierten Funktionen.
Desweiteren könnte man diese Interfaces benutzen um auf die
COM-RS232-Schitstelle zu zugreifen um damit dann deine
Terminal-Geschichte zu machen. Das hat aber dann keinen Zusammenhang zum
eigentlichen Bootloader sondern bietet nur die Anbindung der RS232. Ich
sehe nämlich einen ziemlichen Aufwand in dem Punkt wie man Bootloader
uund Terminalclient in der eigenen Applikation miteineraner verbindet.
Der Bootloader arbeitet per Pollling in der Kommunikation und
unterdrückt jede asynchrone Verarbeitung per ISRs. Der Terminal Client
in der Applikation sollte so in keinem Falle arbeiten, dieser sollte
Interrrupt-gesteeurt funktionieren. Zusätzlich noch das problem das je
nach Kommunikationshardware, also 1-Wire/2-Wire/invertiert/nicht
invertiert, müsste der Terminalclient in der Applikation alle diese
Modis auch unterstützen. Es macht ja keinen Sinn wenn der Bootloader im
1-Wire läuft und das Terminal nur im invertierten 2-Wire Modus
funktioniert.
Ich bin eventl. gerne bereit einen kleinen Terminal-Srver in der
PC-Software zu integrierten die aufbauend auf den aktuellen
Verbindungsparametern die der Bootloader zuvor ausgehandelt hat sich mit
dem AVR nach dem Start der Applikation weiterhin zu verbinden, bzw.
verbunden zuz bleiben. D.h. man verbindet erstmal zum Bootloader (zwecks
AutoBaud, Autodetektion 1-Wire/2-Wire). Man bleibt verbunden wechselt zu
terminal Page und Startet die Applikation im AVR. Diese Applikation
müsste sich die Baudrate etc.pp. aus den internen Registern des AVRs
holen und ihrerseits eine Terminalkommunikationssoftware initialisieren.
Bisdahin aber nicht weiter. Dh. die UART-Kommunikation in der eigenen
Awnedung um den terminalclient zu implementieren wäre nicht meine
Aufgabe.
Gruß Hagen
Hallo Hagen,
der AVR wird nicht vom ISP versorgt, sondern von einem 7805 gespeist,
das "self-made" Board habe ich schon Jahre im Einsatz, eigentlich nie
irgendwelche Ungereimtheiten bzgl. Spannung gehabt.
Allerdings hängt dort am exterenen Memoryinterface des AVRs ein
Parallel-Flash für Datenspeicherung.
Das sollte aber eigentlich kein Problem sein, so lange das SRE-Bit nicht
gesetzt ist.
Das mit dem SRAM würd ich ja gern probieren, da schein aber noch ein
Problem mit dem PC-Programm zu sein, die Buttons "Read from device" usw.
sind nicht im sichtbarem Bereich, auch wenn ich das Programmfenster
maximiert habe,
ebenfalls sind im Hauptfenster die Browserknöpfe verschwunden, egal wie
groß ich die Fenster mache. (siehe angehängte Bilder)
Sieht nach einem Fontgröße-/art-Problem aus, ich schätze mal das
PC-Programm setzt keine Fonts selber sodaß die "default" Systemfonts
genommen werden,
und die sind von PC zu PC verschieden.
Bei meinem PC auf Arbeit waren alle Buttons zu sehen, wie gewünscht,
beim PC hier zuhause, wie gesagt, komm ich an einige Buttons nicht ran.
bzgl. Terminal, der letzte Abschnitt von Deiner vorherigen Mail bringt
mich auf einen Gedanken:
Wie wäre es wenn dein PC Programm eine virtuelle COM anbietet, damit
kann dann JEDES Terminalprogramm benutzt werden.
die COM-Parameter werden vom PC Programm einfach übernommen, und es
werden die Zeichen, die nichts mit der Bootloader-Kommunikation zu tun
haben, einfach durchgereicht. Allerdings weiß ich nicht wie es
programm-technisch schwierig ist eine virtuelle COM zu implementieren.
Also du hast ja Probleme ;)
Erstmal müssen wir die PC-Software bei dir richtig zum laufen bringen.
Welches Betriebsystem hast du ? Welche Einstellungen hast du bei der
Darstellung, Fonts, Scalierung etc.pp. ? Du bist der Erste der solche
Probleme hat.
Ich habe das Program mit Delphi 5 programmiert und verlasse mich darauf
das Delphis VCL da alles richtig macht, sprich Ausrichtung der Controls
usw. Das es damit Probleme geben soll ist mir neu, immerhin arbeite ich
damit professionell seit dem es Delphi auf dem Markt gibt.
Schick mir doch mal ne PN so das du mir per EMail noch mehr Screenshots
schicken kannst. Du must da auch nicht auf die Bildgröße achten, mein
Postfach ist ziemlich groß.
Also ich habe das bei mir mal versucht zu reproduzieren, Systemfonts,
Scrollbars, Bildschirmscalierung etc.pp. verändert, bekomme es aber nie
hin das so ein Fehler auftritt wie der bei dir.
Probiere doch mal die EXE aus dem Attachment. Ich habe den Font, den
BIDI-Mode und die Autoscalierung und einige andere Werte geändert. Denke
zwar nicht das das hilft aber probieren können wir es ja mal.
Ich bräuchte also als erstes von dir noch mehr Infos über dein System.
>Das mit dem SRAM würd ich ja gern probieren, da schein aber noch ein>Problem mit dem PC-Programm zu sein, die Buttons "Read from device" usw.
Falls es mit der geänderten Version geht dann probiere das mit dem SRAM
und EEPROM aus, damit wir wissen ob es an der Kommunikation liegt.
>bzgl. Terminal, der letzte Abschnitt von Deiner vorherigen Mail bringt>mich auf einen Gedanken:>Wie wäre es wenn dein PC Programm eine virtuelle COM anbietet, damit>kann dann JEDES Terminalprogramm benutzt werden.>die COM-Parameter werden vom PC Programm einfach übernommen, und es>werden die Zeichen, die nichts mit der Bootloader-Kommunikation zu tun>haben, einfach durchgereicht. Allerdings weiß ich nicht wie es>programm-technisch schwierig ist eine virtuelle COM zu implementieren.
Ich soll einen Windows Kernelmode Treiber mal eben programmieren ?
Vergiß es ganz schnell, den Streß will ich nicht nochmal haben.
Es ist ja kein Problem für mich, aufsetztend auf die schon bestehende
COM-Verbindung ein Terminal laufen zu lassen, das ist das geringste
Problem. Das was die Sache so zeitaufwendig macht ist die nötige
Bibliothek die wir auf AVR Seite benötigen um sie in die eigene
AVR-Applikation einbinden zu können. Und exakt diese Bibliothek werde
ich in nächster Zeit nicht programmieren.
In der PC-Software wäre das ein Kinderspiel, einfach Verbindung zum
Bootloader, Run-Kommando senden das die Applikation durch den Bootloader
im AVR gesteartet wird und dann übernimmt die Terminalbibliothek die
Kontrolle über die RS232. Nur, damit ich die PC-Software dann ordentlich
testen kann müsste ich für den AVR eben auch diese Bibliothek
programmieren und das mache ich jetzt nicht. Und sowas blind, ohne reale
Tests zu programmieren, um dann einen erhöhten Support zu haben, weil
Nichts ohne Test sofort in der Praxis laufen kann, mache ich ebenfalls
nicht. Es ist Hobby und ich muß mir ganz genau überlegen welches meiner
Projekte, von den vielen, ich mal endlich fertig bekommen will. Dazu
gehört dieses Terminal eben nicht, weil ich es nicht brauche. Denke das
das wohl nachvollziehbar ist, oder ?
Schick mir ne PN, und wir können dann eine Zusammenarbeit anstreben.
Wenn du die Tests und die Terminalbibliothek für den AVR übernimmst,
baue ich die entsprechende Funktionalität in die PC-Software sofort ein.
Gruß Hagen
Hallo Hagen,
nur ganz schnell bevor ich ins Bett gehe,
das angehängte PC Programm funktioniert, alle Buttons sind sichtbar,
so wie auch auf meinem Arbeits-PC,
ich hab hier das normale Windows XP mit Sp2 zum Laufen, also nichts
exotisches,
alles weitere per PN
Grüße,
Micha
SMTP error from remote mailer after RCPT TO:.....:
host mx0.gmx.net [213.165.64.100]: 550 5.1.1 ... User is unknown
{mx094}
Du musst mir schon deine richtige EMail Addresse geben. Oder melde dich
hier im Forum als registrierter Benutzer an, dann geht das auch per PN
indem du meinen Namen anklickst (ist dann blau)
>ich hab hier das normale Windows XP mit Sp2 zum Laufen, also nichts...
ich entwickle die PC-Software auch auf diesem System, und läuft. Du
musst also irgendwas anders eingestellt haben.
Gruß Hagen
Für alle die es interessiert. Das Problem vom Micha konnte eingegrenzt
werden.
Der ATmega162 kann im Kompatibilitätsmodus als ATmega161 laufen. Meine
PC-Software ermittelt alle nötigen Parameter wie FLASH/EEPROM/SRAM
Position/Größe aus den ATMEL Part Decsrption XMLs die beim AVR Studio
enthalten sind. In diesen XMLs ist der ATmega161comp unvollständig bzw.
fehlerhaft beschrieben, es fehlen die Infos für die BootPages.
Desweiteren benutzt mein Bootloader aus Effizienzgründen eine spezielle
Berechnung der Signatur der AVRs. Diese Berechnung reduziert die 3 Bytes
Signatur auf eine 1 Bytes Signatur. Das funktioniert auch wunderbar bis
eben auf den Punkt ATmega161. Dessen Signatur überschneidet sich dann
mit der Signatur des neueren ATtiny88.
31=1E9311, ATtiny88 , 8192, 64, 512, 256, 64, 0, 0, 0, 0
31=1E9401, ATmega161 , 16384, 512, 1024, 96, 128, 8, 0, 0, 0
31=1E9401, ATmega161comp, 16384, 512, 1024, 96, 128, 0, 0, 0, 0
34=1E9404, ATmega162 , 16384, 512, 1024, 256, 128, 2, 4, 8, 16
Losung dieser Probleme mit der aktuellen Version sieht so aus:
1.) .DEV Datei so abändern
31=1E9311, ATtiny88 , 8192, 64, 512, 256, 64, 0, 0, 0, 0
3E=1E9401, ATmega161 , 16384, 512, 1024, 96, 128, 8, 0, 0, 0
3F=1E9401, ATmega161comp, 16384, 512, 1024, 96, 128, 2, 4, 8, 16
34=1E9404, ATmega162 , 16384, 512, 1024, 256, 128, 2, 4, 8, 16
also aus 31 wird 3E/3F beim ATmega161/comp, beim ATmega161comp müssen
die letzten 4 Zahlen synchron wie beim ATMega162 geändert werden
2.) in AVRootloader.inc
.set SIGNATURE_CRC = (SIGNATURE_000 << 3) + (SIGNATURE_001 << 4) +
SIGNATURE_002
ersetzen mit
.set SIGNATURE_CRC = 0x3E oder 0x3F je nachdem ob man ATmega161 oder
ATmega161comp benutzt wird
3.) in AVRootloader.asm muß beim ATmega162 im Kompatibilitätsmodus
.include "m161def.inc" ; ATmega161
Inkludiert werden, nicht m162def.inc !!
Da dieses Problem nur mit dem ATMega162/161comp. auftritt wird es
erstmal keinen HotFix geben, das Teil ist eh abgekündigt.
Gruß Hagen
Version 2.0
Die SIGNATURE_CRC wurde entfernt. Der neue ATtiny88 überschneidet sich
mit dem ATmega161 beim Verfahren der Version 1.0. Nötige Änderung dafür
ist in AVRootloader.asm -> BootSign: die 4 Bytes. Die PC-Software kann
aber weiterhin mit der Version 1.0 benutzt werden, ist also
abwärtskompatibel.
AVRootloader.dev aktualisert auf die neusten AVRs und beim ATMega161/
ATmega161comp. (ATmega162 im 161 Kompatibilitätsmodus) Fehler aus den
AVR Studio XML Dateien beseitigt. ATMEL hat dort falsche Angaben
gemacht.
Die PC-Software ist intern komplett neu geschrieben worden. Wer
Interesse hat kann die AVRootloader.DLL benutzen um die komplette
Funktionalität der PC-Software (ohne GUI) in seine eigene Anwendung zu
integrieren. Diese DLL implementiert die Funktionalität über Interfaces,
sollte also auch über andere Programmiersprachen nutzbar sein. Delphi
Header in AVRootIntf.pas. Über diese Schnittstelle kann man auch eigene
Communications-Interfaces vorgeben über die dann die AVRootloader
Schnittstelle kommuniziert, zb. AVR309 USB oä.
Über AVRootloader.ini in Section [Timeouts] RTSPulse=? kann man das
Verhalten beim Verbindungsaufbau der PC-Software von der RTS-Leitung der
RS232 einstellen. Man kann über diese Option also den RTS PIN der RS232
zb. für x Millisekunden von HIGH auf LOW und wieder HIGH ziehen. Damit
könnte man, über Serienwiderstand und Shottky Diode den RTS Pin auf den
RESET Pin des AVRs klemmen. Bei jedem Verbindungsaufbau der PC-Software
zum Bootloader wird somit autom. der AVR in den Reset versetzt.
Wer möchte kann ein Copyright String oä. in AVRootloader.asm einbauen.
Dieser String wird dann in der PC-Software in der Device Information
angezeigt.
Das geht so:
BootSign: .db "BOOT"
BootInfo: .db SIGNATURE_001, SIGNATURE_002, BootVersion, BootPages
BootMsg: .db SUCCESS, "Hello World"
BootEnd:
Wichtig ist das das erste Byte immer SUCCESS ist.
Das Timeout-Handling in der Baudratedetektion wurde geändert. Sollte
innerhalb des Timeouts, zb. 250ms, eine gültige Baudrate detektiert
worden sein so verlängert sich der Timeout ab diesem Moment um weitere
250ms. Entweder der Bootloader empfängt das korrekte BootSign: (zb.
BOOT) und springt in den Kommandomodus oder aber die Baudrate-Detektion
startet erneut mit weiteren 250ms. Wenn also Ruhe auf der RX-Leitung
ist, so startet die Applikation wie gewohnt nach dem Timeout. Wenn aber
eine PC-Software versucht eine Verbindung aufzubauen so bleibt der
Bootloader solange in der Baudrate-Detektion bis die PC-Software aufhört
eine Verbindung aufzubauen. Diese Vorgehensweise macht das Verfahren
wesentlich robuster. In Version 1.0 war der Timeout ein Gesamt-Timeout
des Verbindungsversuches. Nach den zb. 250ms wurde immer die Applikation
gestartet, egal ob eine PC-Software einen Verbindungsaufbau versuchte
oder nicht.
Gruß Hagen
Nochmal zurück zu Michaels Problem mit dem ATMega162 im ATMega161
Kompatibiliätsmodus.
Zuerst zur Lösung des Problemes:
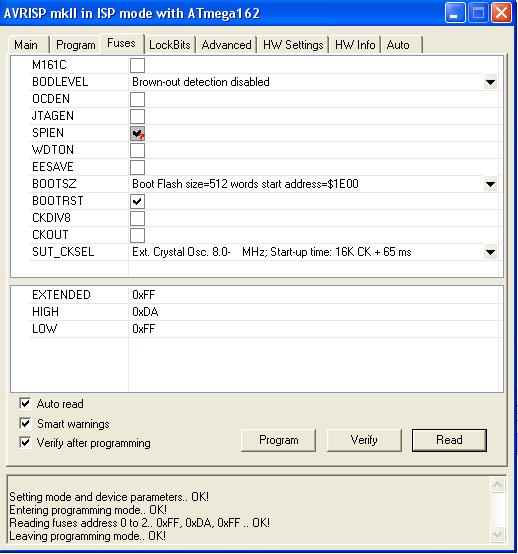
1.) in AVRootloader.asm
.include "m161def.inc" ; ATmega161
.equ RWWSRE = 4 ; activate for ATmega162 in ATmega161 compatibility
mode
einfügen. Wichtig ist das das RWWSRE Bit manuell nachträglich deklariert
werden muß.
2.) in AVR-Studio Fuses
M161C=Häckchen
BOOTSZ=Boot Flash size=512 words start address=$1E00
BOOTRST=Häckchen
3.) AVR-Studio Lockbits
BLB0 und BLB1 nicht setzen.
Erklärung:
Der ATMega161 kennt das "Read While Write" Feature des SPM Befehles
nicht. Der ATMega162 kennt diese Feature aber. Lässt man den ATMega162
im Kompatibilitätsmodus arbeiten als 161'er dann muß man nach dem
Programmieren einer FLASH Page denoch diese Page wieder für den
Lesezugriff freischalten. Da aber in m161def.inc das nötige RWWSRE Bit
nicht deklariert ist wurde also die geschriebene FLASH Page nicht zum
Lesen freigeschaltet. Das anschließende Verify musste somit scheitern.
Zum Glück betrifft die nur das Sorgenkind ATMega161 bzw. den
Kompatibilitäsmodus des ATMega162. Die PC-Software erkennt nun korrekt
einen ATmega161. Die Problematik entstand weil der ATMega162 im m161
Modus das Extended IO ausblendet und somit die SRAM Startaddresse von
0x0100 auf 0x0060 vorverlagert und einiges der Peripherie deaktiviert.
Man kann also nicht den Bootloader so compilieren das er als ATmega162
läuft und die Fuse des M161C Modus setzen. Man muß den Bootloaer auf dem
M162 wirklich als M161 compilieren, aber dann unterscheiden sich die
Programmierbefehle (SPM) trotzdem. Kurz gesagt: der ATMega162 im M161C
Modus ist nicht vollständig kompatibel zum ATMega161, der SPM Befehl
funktioniert dann weiterhin wie bei einem ATmega162.
Gruß Hagen
Es tut mir ja leid, aber ein neues Update. Mit bestimmten HEX Files, bei
denen die Speicherblöcke nicht linear aufsteigend in ihrer Addresse
vorlagen, kam es zu Fehlern. Die PC-Software hat also HEX Files falsch
interpretiert. Unter normalen Umständen dürfte das aber kein Problem
sein da die meisten Tools wie WinAVR GCC oder AVR Studio solche HEX
Files immer mit linear nachfolgenden Addressen erzeugen.
Mit der neuen Version ist das natürlich gefixt.
Gruß Hagen
Hallo,
hast Du zufällig irgendwo eine Anleitung wie man den Loader in seine
eigene Delphi-app einbauen kann?
Ich komme da nicht recht weiter, würde gerne einen "One-Button" upload
von meiner Software aus einbauen, Comport ist da schon bekannt.
Ich müsste also nur dem Loader den Comport übergeben und eine Datei zum
flashen. Irgendwelche Tipps?
Louis
Ja, das geht. Der Bootloader relevante Teil befindet sich auch in der
AVRootloader.dll. Du kannst diese DLL in deine Delphi Anwendung
einbinden, das sähe so aus wie im Attachment gezeigt.
Als erstes entpackst du diese ZIP zb. nach c:\programme\atmel\ mit
Ordnern. Dann startest du Delphi und öffnest das Project1.dpr im Pfad
..\AVRootlaoder\Test DLL\. Darin zeige ich wie man die AVRootloader.dll
über die Unit AVRootIntf.pas benutzen könnte. Ist alles auf ein Minimum
reduziert damit man die Funktionweise besser sehen kann. Im Grunde für
ein bischen erfahrenen Laien echt einfach.
Du benötigst später deine EXE, die AVRootloader.dll, AVRootloader.dev
und die von dir compilierte *.ACY Datei zu deiner *.HEX und *.EEP Datei.
Eine ACY Datei enthält das HEX für den FLASH (Programm) wie auch die
EEPROM Daten aus der *.EEP Datei wenn man das möchte. Die Daten im ACY
sind natürlich mit dem Paswort und XTEA verschlüselt. Im DEMO prjekt
kannst du solch eine ACY Datei ezeugen lassen und sie dann
Programmieren.
Die AVRootloade.asm habe ich so angepasst das sie für einen ATmega162 im
1-Wire-RS232 mit sicherer Verschlüsselung arbeitet. Das musst du an
deine Bedürfnisse anpassen, steht aber in der Readme drinnen wie und
was. Das Test.hex das ich mitliefere ist für einen ATmega162.
Ich würde das DEMO an deiner Stelle also soweit reduzieren das man nur
noch den "Program" Button hat. Eventuell sogar ganz ranehmen und die
Aktion gleich nach dem Start der Anwendung ausführen. Mit der normale
PC-Bootloader-Software im Ordner \AVRootloader\Windows\ kannst du nun
deine *.ACY Dateien verschlüsselt erzeugen und sie dann mit deinem
Program in den AVRladen lassen. Also alles wie die Buttons "Connect",
"Erase", "Compile" raus. Die Methoden .GetACYFileName und
.GetEEPROMFileName liefern immer '' zurück. Nur die Methode
.GetFLASHFileName gibt den Namen deiner *.ACY Datei zurück.
Minimalistisch sähe es so aus:
Im Attachment mal das Test project für den ATmega162 das ich benutze.
8Mhz interner Takt, an PD0 der 1-Wire-RS232 RX, wenn man 2-Wire testen
möchte dann an PD1 der TX Pin und an PD3 eine LED mit Vorwiderstand nach
VCC.
Vergiß niemals die Lockbits entsprechend zu setzen. Also nach dem Upload
der Bootloader Software die Lockbits so setzen das ein Auslesen des AVRs
nicht mehr möglich ist. Ansonsten hat das alles ja keinen Nutzen ;)
Gruß Hagen
Naja andererseits kannst du dir auch die Arbeit sparen und meine fertige
PC-Software benutzen, rufe sie in deinem Falle mit folgenden Parametern
auf
AVRootloader.exe -PCOM2 -B112500 -Dc:\pfad_zu_deinen_ACY_files\
-Ftest.acy -Apc
Damit startest du meine PC-Software, diese versucht eine Verbindung über
COM2 mit 112500 Baud und flasht Test.ACY das im Pfad
c:\pfad_zu_deinen_ACY_files\ liegt und schließt die PC-Software nach
erfolgereicher Aktion wieder automatisch -> Parameter -Apc.
Die Erklärung dieser Kommandozeilenparameter findest du in
AVRootloader.txt.
Möchtest du eine unverschlüsselte HEX/EEP Datei auf diese Weise in einen
AVR uploaden der nur mit verschlüsselten Daten arbeitet dann füge den
Parameter -K5441C8CA4DDF8EEA19AAAFD877AEB488 noch hinzu. Natürlich den
Key den du in deinem Bootlaoder auch benutzt. Sollte einer dieser
Parameter nicht übergeben worden sein so lädt die PC-Software die
nötigen Einstellugen aus der INI-Datei AVRootloader.ini. Man könnte also
auch einfach "AVRootloader.exe -Apc" aufrufen und sollte dann vorherig
einmalig alle Parameter im GUI der Software voreingestellt haben.
Vergiß auch nicht ein neues Passwort zu erzeugen, damit du nicht das im
Source vordefinierte benutzt, macht ja keinen Sinn wenn jeder dein
Passwort kennt ;) Dazu startest du meine PC-Software und drückst den
"Make Password" Button auf der ersten Seite. Daraufhin wird per Zufall
ein Passwort erzeugt und auch gleich in AVRootloader.asm geschrieben.
Alternativ kannst du auch noch dieses neue Passwort in die
AVRootlaoder.ini schreiben lassen. Und es wird auch noch in die
Zwischenablage kopiert, also einfach STRG+EINFG drücken wenn du es
woanderst sichern möchtest.
Gruß Hagen
Vielen vielen Dank für die ausführliche Info! Echt super, dann kann ich
ja gleich loslegen :)
Ich habe nur ein kleines Problemchen: Meine Hardware meldet sich nicht,
ich flashe den Bootloader nach dem Compilergang, das klappt wunderbar.
Aber leider bekomme ich keine Verbindung.
Ich habe einen Mega644p mit 16 MHz, habe BOOTRST gesetzt, BOOTSZ0 und
BOOTSZ1 nicht.
Mit dem Fastboot von Peter Danegger klappt es an der Hardware prima,
Deiner läuft offenbar nicht. Was könnte ich da falsch machen?
Habe den normalen Uart0 an, also PD0 und PD1 als Pins.
Uartinvert habe ich beide ausprobiert.
Irgendwelche Tipps?
Louis
1.) in AVRootloader.asm
.include "m644Pdef.inc"
.equ UseWDR = 1
.equ UseAutobaud = 1
.equ UseVerify = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseSRAM = 0
.equ UseCrypt = 1
.equ UseCryptFLASH = 1
.equ UseCryptE2 = 1
.equ UartInvert = 1
.equ RX_PORT = PORTD
.equ RX = PD0
.equ TX_PORT = PORTD
.equ TX = PD1
.set XTAL = 16000000
.set BootDelay = XTAL/4
.set BootBaudrate = 115200
.set BootVersion = 2
.set BootCodeSize = 852
nun neu kompilieren, und HEX file auf AVR uploaden. Fuse auf "First Boot
Start" und BOOTRST setzen. Boot Flash size=512 words Boot start
address=$7E00 ($FC00)
Danach AVR über RS232, du benutzt doch einen Pegelwandler ? falls nicht
und du benutzt direkt die RS232 Leitungen dann UartInvert=0 setzen.
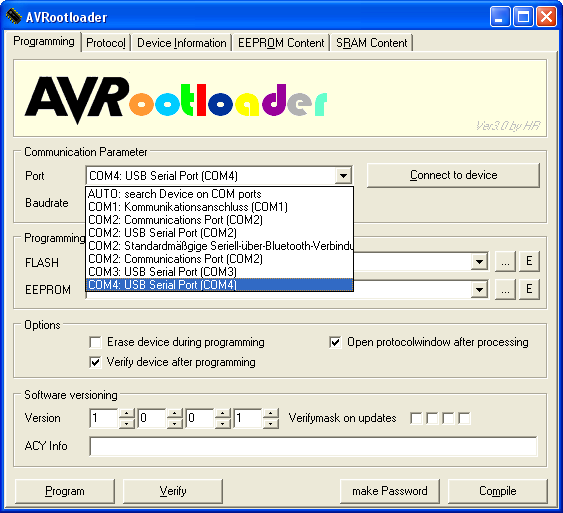
PC-Software starten, und richtigen COM Port auswählen und Baudrate
einstellen 112500 ist ein guter Wert. Nun Button "Connect to Device"
drücken und eventuell den AVR reset'en. Im "Protocol" Window sollte dann
stehen das er auf 2-Wire Modus gewechselt ist.
Wenn er dann eine Verbindung hat kannst du in "Device Information" alle
wichtigen Einstellungen zum AVR sehen.
Als nächsten Test "EEPROM Content" und "Read from Device" ausprobieren.
Und dann mal einige Änderungen von Hand im HEX Editor machen und "Write
to Device" drücken.
>> Deiner läuft offenbar nicht.
bei dir nicht ;)
Hast du sonst igrendwas in AVRootloader.asm verändert ? zb. BootSign:
"BOOT" oder sowas ?
Gruß Hagen
Arg...es war der Programmer, der Hat Mist geschrieben, am Ende fehlte
etwas, anscheinend ist der defekt. Ich habe es jetzt aber am Laufen,
wunderbar!
Encryption läuft auch, genau das habe ich gesucht. Super, vielen vielen
Dank!
Louis
Hi Louis,
beachte bitte folgendes damit es auch kryptographisch sicher ist:
1.) erzeuge mit der PC-Software einen neuen Schlüssel
- steht dann in AVRootloader.asm bei BootKey: drinnen, 16 Bytes
- steht wenn du möchtest in AVRootloader.ini in Password=?? drinnen
2.) stelle sicher das die Option UseSRAM=0 ist. Ansonsten kann nämlich
ein cleverer Angreifer den Bootloader ausnutzen um ihn zu knacken indem
er gezielt den SRAM und damit IO/Register Bereiche manipuliert.
3.) stelle sicher das UseCryptFLASH=1 ist, ansonten bei UseCryptFLASH=0
kann man verschlüsselte wie auch unverschlüsselte Daten schreiben, und
somit auch ein eigenes Program das den Bootlaoder FLASH ausliest und
somit auch den BootKey:, es sei denn das LPM/SPM in der Application
Section verboten wird über die Fuses.
4.) wenn du deine/meine Bootloader-PC-Software deinen Kunden gibts
stelle sicher das dort in der AVRoiotloader.ini bzw. nirgends der
Schlüssel gespeichert ist
5.) liefere ausschließlich nur verschlüsselte ACY Dateien aus
Falls du mit Delphi meine AVRootloader.dll benutzt wäre ich für ein
Feedback sehr dankbar, ich würde gerne sehen was daraus wird ;)
Gruß Hagen
Hallo Hagen,
danke für die Tipps, ich habe sie jetzt bei einem Exemplar mal
angewandt, das Teil ist jetzt sozusagen dicht und nur noch durch meine
Software beschreibbar. Das ist genau das, was ich gesucht habe, jeder
kann ein Update flashen, aber nur eins dass von mir kommt und geprüft
ist. So kann auch keiner den Code knacken und sehen wie die Software
arbeitet. perfekt.
Mein Mega64 wird nach Abschluss mit beiden Lockbits gelockt, das sollte
so bombensicher sein.
Ich gebe bescheid wenn ich die Software soweit habe, noch ist sie nicht
100% fertig.
Louis
>Mein Mega64 wird nach Abschluss mit beiden Lockbits gelockt, das sollte>so bombensicher sein.
Aber nicht den Fehler machen, wie ich aus Überschwenglichkeit, alle
Lockbits zu setzen, auch diejenigen die dem Bootloader den LPM/SPM
Befehl sperren ;)
Gruß Hagen
Hehe, nene, so doof bin ich nun auch wieder nicht..
Btw, was genau bedeutet eigentlich SPM und LPM? Steht überall im
datasheet, nur die Erklärung fehlt...
Louis
SPM - Store Program Memory
LPM - Load Program Memory
Weist auf die beiden gleichnamigen Assembler Mnemonics, mit denen sich
der Mikrocontroller selbst den Flash schreiben bzw. aus seinem eigenen
Flash (innerhalb des Programms) lesen kann.
Ich habe die sehr nette AVRootloader fuer ein ATmega32 implimentiert. Es
funksioniert auch schon, aber nicht alles wie es beschreibt ist.
"Make Password" ohne in AVRootloader.ini zu spechern tut nichts. Was
heist "in die Zwischenablage kopiert und kann so anderenorts gespeichert
werden"?
Bei mir wird nichts weiter abgefragt un nichts gespeichert.
Muss in AVRootloader "Password = " stehen mit blank?
Doch, tut es: Das Kennwort wird in die .asm-Datei des Loaders
gespeichert, (ganz unten...) Beim Assembler-Lauf wird es dann in den
Code eingefügt, der Loader muss es ja irgendwo her wissen wenn er einsam
und alleine in seinem Megaxxx seitzt und auf Programme wartet.
Das Passwort selbst wird in die Zwischenablage kopiert, öffne Notepad
und drücke STRG+V, dann siehst Du es.
Das Kennwort solltest Du GUT aufbewahren, ist es weg kannst Du keine
Software mehr laden!
Louis
> Muss in AVRootloader "Password = " stehen mit blank?
Jain ;) Entweder
[System]
Password=
mit oder ohne Leerzeichen ist egal da diese intern entfernt werden, oder
[System]
Password=0A5ED11C8B0FA36F7C4F1EE20526904B
oder
Password=$0A,$5E,$D1,$1C,$8B,$0F,$A3,$6F,$7C,$4F,$1E,$E2,$05,$26,$90,$4B
Alle Sonderzeichen, auch Spaces werden entfernt und das was übrig bleibt
sind die HEX-Chars und das wird als Passwort benutzt. Ob man A..F groß
oder klein schreibt ist egal.
Wenn kein Passwort in der INI Datei gespeichert wurde fragt die
PC-Software per Dialogbox das Passwort ab wenn es benötigt wird. Das
Passwort in die INI Datei zu speichern erleichtert dem Programmierer
also die Arbeit. Bei der Installation der Software bei deinen Kunden
sollte das Password nicht gespeichert werden, logisch.
Beantwortet man die Frage "Do you want to save Password in INI-File ?"
mit NEIN/NO dann wird das Password in der INI Datei gelöscht.
Danach wird die AVRootloader.asm Datei mit dem neuen Passwort
modifiziert und zusätzlich ins Clipboard kopiert. Du kannst es also per
Paste irgendwo selber abspeichern.
Um das Passwort nicht zu verlieren bietet es sich an die geänderte
AVRootloader.asm zu sichern, im Projektbackup das ja jeder Programmierer
auch macht ?!
Nach "Make Password" muß also AVRootloader.asm neu kompiliert werden.
Gruß Hagen
Hallo,
also der Bootloader ist eine tolle Sache. Hab diesen erfolgreich auf
einen ATmega8 im Einsatz. Jetzt wollte ich diesen auf einen ATtiny85
auch benutzen.
Leider kommt beim Flashen folgender Fehler:
Cmd.WriteFlash.ResCheck() Error: Verify failed
Folgendes habe ich bereits probiert:
1. Informationen lesen, funktioniert Software erkennt den ATtiny85
2. EEPROM lesen, schreiben, schauen ob sich was zufällig ändert.
Funktioniert auch.
3. Wie 2. nur mit SRAM.
4. Flashen via ISP funktioniert.
5. Anderer ATtiny85 gleiches Problem
6. Verschiedene Baudraten, keine Erfolg
Im Anhang die ASM die ich benutze.
Vieleicht hat jemand eine Lösung.
letzte Version der PC-Bootloader Software downloaden.
Mit welchem Entwicklungswerkzeug hast du dein HEX erzeugt ? Also das was
du über den Bootloader flashen möchtest.
In den älteren Versionen der PC-Software war bei der Interpretation der
Daten im HEX File ein Fehler. Sobald im HEX File die Addressen nicht
linear sortiert gespeichert wurden gabs mit der alten Version Probleme.
Wenn man mit AVR Studio oder WinAVR GCC arbeitet entstand dieses Problem
nicht.
Alternativ in der AVRootloader.INI die Section [Timeouts] modifizieren,
sprich größere Timeouts wählen.
Ich tippe aber auf ersteres Problem. Kannst ja mal das HEX File posten.
Übrigens kannst du das UseVeritfy = 0 sezten und so par Bytes Code
sparen was dazu führt das die 518 Bytes in deinem Falle unter 512 Bytes
sinken und du somit eine Flashpage (64 Bytes) weniger für den Bootloader
verbrauchst. Beim Schreiben vom FLASH/EEPROM ist schon eine Prüfsumme
enthalten und auch ein integrierter Lesetest der soeben programmierten
Daten, ergo: ein implizites Verify. Das zusätzliche externe Verify das
mit UseVerify=1 aktiviert wird dient nur als zusätzliche Absicherung
bzw. um testen zu können ob der FLASH eines schon programmierten AVRs
mit einem HEX File übereinstimmt. Wenn man also nur sichergehen möchte
das die aktuelle Programmierung korrekt verlief dann recith das
impliziete Verify aus und man kann mit UseVerify=0 einiges an Code
sparen (der natürlich dann deiner Anwednung zugute kommt).
Gruß Hagen
Hallo,
Danke für die Antwort. Also die AVRootloader.exe ist vom 06.05.08 und
ist ca. 940KB groß. Die HEX erzeuge ich mit avr-gcc 4.2.2. Das mit der
UseVerify ist z.Z. noch aktiv weil eben dieser Fehler auftritt. Das mit
den Timeout's werde ich noch probieren. Gibt es denn einen offiziellen
(ich nen das mal so) Downloadplatz?
Gruß Daniel
Ok, aktuellste Version hast du und HEX sieht auch sauber aus. Bleiben
noch zwei Möglichkeiten
a) erhöhe die Timeouts, denke aber nicht das das was ändert
b) dein AVR könnte defekt sein, bzw. dessen Spanungsversorgun instabil.
Versuche den AVR mal über ISP zu flashen.
Connecte mal mit dem Bootloader und poste hier alle was im Info Fenster
angezeigt wird, vielleicht kann ich ja daraus was erkennen.
Downloadplace ist hier dieser Thread ;)
Gruß Hagen
Daniel wrote:
> Leider kommt beim Flashen folgender Fehler:> Cmd.WriteFlash.ResCheck() Error: Verify failed
Ich tippe mal auf Selbstprogrammierfuse nicht gesetzt.
Peter
Hallo Hagen,
ich bin von dein Bootloader voll begeistert.
Mit meinem ATmega8535 habe ich gleich probiert.
Funktioniert soweit, bis auf die Lockbits.
Setze ich keine Lockbits kann ich mein FLASH-Programm problemlos immer
wieder neu beschreiben.
Möchte ich mein Programm vor dem Auslesen schützen, so setze ich dann im
Programmer BOOTLOCK02. Damit kann ich das Auslesen mit einem ext.
Programmer verhindern. Leider geht dein EXE-Prog. dann nicht.
Fehlermeldung kommt:
Cmd.SetAddr. readByte() ICOM: read error
Besteht die Möglichkeit, mit deinem EXE-Prog. nur den FLASH zu schreiben
ohne das das Programm immer erst auf EEPROM oder FLASH lesen will? Was
ja nicht geht, weil ich den Ausleseschutz aktiviert habe.
Grüße
Hallo Hagen,
zwischenzeitlich habe ich mal dein Delphi-Programm ausprobiert.
Bei der Function "Button2Click..." habe ich "FLoader.DoProgram(False,
False)" probiert und bekommen die gleichen Rückmeldungen wie unter
Einstellungen von "True":
Connection : 2-Wire
Device name : ATmega8535
Device signature : 1E9308
SRAM size : 512 Byte
EEPROM size : 512 Byte
FLASH size : 8192 Byte
FLASH size for application : 7680 Byte
FLASH pagesize : 64 Byte
Bootloader size : 512 Byte
Buffersize for data : 472 Byte
SRAM start address : 96
Bootloader version : 2
Use bootsection : Yes
Cryptography supported : No
Device connected
Program...
execute compiled data
selected options in compiled file:
- programming FLASH
- erase FLASH during programming
- full verify FLASH after programing
Cmd.WriteFlash.ResCheck() Error: Verify failed
Grüße
@Elektroniker
Ich habe das Datenblatt des ATMega8535 nicht zur Hand aber die Fuses
müssen so programmiert werden das
- das Auslesen per ISP etc.pp. nicht mehr möglich ist
- das die korrekte Bootsection eingestellt wird, also >= 512 Bytes = 256
Words
- evntl. den SPM Befehl aus der Application Section verboten wird
- evntl. der LPM Befehl aus der Application Section verboten wird
- der Code in der Boot Section, eg. der Bootloader, per SPM und LPM
Zugriff auf die Application Section und mindestens per LPM Zugriff auf
die Boot Section hat
Der Bootloader muß also per SPM + LPM in die Application Section Zugriff
haben. Du kannst den SPM ZUgriff des Bootloaders in die eigene Boot
Section verhindern damit sich der Bootloader nicht selber löschen kann.
Aber in jedem Fall muß der Bootloader per LPM den kompletten FLASH
auslesen können. Einerseits weil der Bootloader nach dem Programmieren
des FLASH/EEPROM per LPM diesen wieder ausliest und mit den soeben
programmierten Daten im SRAM-Buffer vergleicht, ergo implizites Verify
beim Programmieren. Und andererseits weil der Bootloader am Ende im
FLASH eine Tabelle mit wichtigen Daten enthält die er auslesen können
muß, also solche Daten wie Signatur und Identifier.
Lange Rede kurzer Sinn: ich schätze du hast zu viele Lockbits gesetzt
und damit den Bootloader ausgesperrt.
Gruß Hagen
>Bei der Function "Button2Click..." habe ich "FLoader.DoProgram(False,>False)" probiert und bekommen die gleichen Rückmeldungen wie unter>Einstellungen von "True":
Der Parameter "VerifyFlash" = TRUE kann nur dann von Relevanz sein wenn
die Datei die du flashen möchtest eine reine HEX Datei ist. Ist es aber
eine "precompilierte" ACY-Datei dann entscheiden die Optionen die bei
ihrer Kompilierung gesetzt waren. Erkennen kannst du das ganz einfach am
letzten Punkt im Protokoll
>selected options in compiled file:>- programming FLASH>- erase FLASH during programming>- full verify FLASH after programing
full verify FLASH after programming ist VerifyFLASH=TRUE bei einer
HEX-Datei oder die vergleichbare Checkbox in der
PC-Bootloader-Applikation bei der Erstellung einer ACY-Datei.
Ändert aber nichts an der Sache, da der Bootloader schon während des
impliziten Verifys gleich nach der Programmierung aussteigt. Dieses
Verify kann nicht deaktiviert werden per PC-Software, höchstens indem
man die AVRootloader.ASM Datei umschreibt.
Es gibt also im AVRootloader gleich zwei Arten des Verify. Das implizite
Verify wie vorher ausgiebig beschrieben. Und das separate und zu jeder
Zeit nachträglich durchführbare Verify, wie bei den vielen anderen
Bootloadern üblich. Letzeres benötigt man eigentlich nur um verifizieren
zu können ob der Inhalt einer gegebenen HEX Datei mit dem Kontext im AVR
übereinstimmt.
Gruß Hagen
Hallo Hagen,
danke für die schnellen und ausführlichen Anworten.
Mit dem Mega8535 kann man nicht so viele Fuses setzen. Meine gesetzten
Fuses:
BOOTRST, BOOTSZ1 und BOOTLOCK02
Wird BOOTLOCK02 nicht gesetzt, dann funktionioert alles. Leider auch das
Auslesen des Programms über den externen Programmer. Aber das möchte ich
verhindern.
Ich bin nochmal alle Postings in diesem Thread durchgegangen. Du hattest
am 06.05.2008 geschrieben:
>Vergiß niemals die Lockbits entsprechend zu setzen. Also nach dem Upload>der Bootloader Software die Lockbits so setzen das ein Auslesen des AVRs>nicht mehr möglich ist. Ansonsten hat das alles ja keinen Nutzen ;)
Wie kann man dein Bootloader einstellen, dass der die Lockbits setzt?
Und wenn die gesetzt werden, dann kann ich mit dein EXE-Prog. nicht mehr
auf den µC zugreifen, weil dann doch die gleiche Fehlermeldung kommen
müsste, als wenn das BOOTLOCK02 gesetz würde?
Soviel ich verstanden habe, werden die Lockbits immer gelöscht (egal vom
Bootloader oder über ext. Programmer), wenn das FLASH gelöscht oder neu
beschrieben wird.
Leider geht es nicht mit EXE-Progr. weil er gleich den Inhalt lesen
möchte und nicht vorher löscht oder neu beschreibt. Könnte das nicht
abgeändert werden, wenn ich den µC FLASH neu beschreiben möchte?
Oder?
Zum Delphi-Programm:
Ich finde es super, dass Du es in Delphi geschrieben hast und ich
programmiere selber nur in Pascal/Delphi und Assembler. Leider wissen
nicht soviele Leute von der tollen Programmiersprache Delphi/Pascal
gegenüber den Anderen. Ich brauche eigentlich nichts weiter ausführen.
Auf jedenfall hast Du mir schon mit deinem Delphi-Tipp erstmal geholfen
und werde es später noch vertiefen. Wenn Fragen diesbzgl. auftreten,
stell ich diese hier im Forum gerne rein.
Grüße
>Soviel ich verstanden habe, werden die Lockbits immer gelöscht (egal vom>Bootloader oder über ext. Programmer), wenn das FLASH gelöscht oder neu>beschrieben wird.>Leider geht es nicht mit EXE-Progr. weil er gleich den Inhalt lesen>möchte und nicht vorher löscht oder neu beschreibt. Könnte das nicht>abgeändert werden, wenn ich den µC FLASH neu beschreiben möchte?>Oder?
Nee da hast du was falsch verstanden. Der Bootloader selber setzt die
Fuses nicht, das kann er garnicht. Man könnte für neuere AVRs die
verschiedene Fuses per Program setzen können, diese Funktionalität in
den Bootloader implementieren, aber dabei sehe ich keinen wirklichen
Nutzen.
Du programmierst über ISP/JTAG/DW die AVRootloader.HEX in den AVR,
natürlich vorher kompiliert für deinen AVR mit deinen gewünschten
Optionen. BOOTSZ Fuse setzen damit der AVR beim RESET den Bootloader
startet. Danach mit PC verbinden und PC-Bootloader starten und als Test
mal EEPROM/SRAM auslesen und schreiben. Wenn das geht kannst du die
Lockfuses setzen. Das dürfte schon reichen denn nun kann man den
ISP/JTAG nur noch aktivieren wenn man den AVR vollständig löscht.
Also mit AVRStudio so:
BOOTSZ=Boot Flash size=256 words Boot address=$0F00
Lockbits:
LB=Further programming and verification disabled
BLB0=SPM prohibited in Application Section
BLB1=No lock on SPM and LPM in Boot Section
Ergibt Lockbits=0x38
Man kann also den ATMega8535 schon so konfigurieren das es ziemlich
sicher ist.
Die Frage ist also mit welchem Programmiertool du den AVR flash'st.
Gruß Hagen
Hallo Allerseits,
bei Verwendung von 'BootMsg' unbedingt darauf achten, dass der Text eine
UNGERADE Anzahl von Zeichen enthält.
Ansonsten hängt der Assembler ein NullByte an.
Dieses Byte wird auch ausgegeben und verwirrt das PC-Programm.
Das PC-Prog erkennt den connect nur zum Teil. Das Senden der 'BootSign'
wird eingestellt, das Programm selbst geht aber nicht in den Zustand
"connected".
Grüße JoJo
>bei Verwendung von 'BootMsg' unbedingt darauf achten, dass der Text eine>UNGERADE Anzahl von Zeichen enthält.>Ansonsten hängt der Assembler ein NullByte an.>Dieses Byte wird auch ausgegeben und verwirrt das PC-Programm.
Das lässt sich im PC-Program sehr einfach abstellen, werde das demnächst
mal bereinigen. BootMsg kann man auch nur verwenden wenn der Bootloader
ohne Verschlüsselung arbeitet.
>Das PC-Prog erkennt den connect nur zum Teil. Das Senden der 'BootSign'>wird eingestellt, das Programm selbst geht aber nicht in den Zustand>"connected".
Könntest du mir genauer erklären was du damit meinst ?
Ich interpretiere deine Aussage so das die PC-Software den
Connection-Aufbau einstellt, sprich in den Connect-Status wechselt,
obwohl der Bootloader im AVR immer noch im Connectaufbau verbleibt.
Eigentlich ist das aber sehr unwahrscheinlich. Die PC-Software sendet
permanent das BootSign. Solange bis der AVR die richtige Baudrate
detektiert hat und das empfangene BootSign mit dem im AVR im FLASH
gespeicherten verglichen hat und Übereinstimmung existiert. Danach
sendet der AVR seine BootInfo an die PC-Software. Diese geht erst in den
Connect Status wenn sie diese BootInfo sauber empfangen hat und die
darin enthaltenen Angaben auch stimmig sind. Dh. normalerweise geht der
AVR als erster in den Connect-Status und erst danach die PC-Software.
Von daher ist es also unwahrscheinlich das die PC-Software schon im
Connectstatus ist der AVR aber noch nicht.
Sollte es zu dem Fall kommen das der AVR nach Senden der BootInfo im
Connectstatus ist die PC-Software aber die empfangene BootInfo nicht
erkennt dann beginnt der Connectionaufbau von vorne. Die PC-Software
sendet also weiterhin #0#0#13 + BootSign. Der AVR der schon in der
Kommandoschleife ist, also connected, erkennt aber die beiden #0#0
Zeichen als Restart-Kommando. Bei diesem Kommando springt also der AVR
wieder an den Anfang des Bootloaders und befindet sich dann wieder im
Connection Aufbau Status. Dh. selbst wenn der AVR schon im Connectstatus
ist die PC-Software aber noch nicht so synchronisiert sich der AVR
spätestens beim nächsten Connectionaufbau der PC-Software neu.
Je länger also BootSign gewählt wird desto wahrscheinlicher kann die
PC-Software und der AVR einen Fehler in der autom. Baudrate-Erkennung
oder Datenübertragung erkennen. Es ist also von Vorteil für die
Stabilität wenn BootSign länger gewählt wird.
Gruß Hagen
>AVR antwortet mit:>[94][06][02][08][30] = 4 Byte 'BootInfo' + Success>[48][65][6C][6C][6F][20][57][6F][72][6C][64][30] = 11 Byte 'BootMsg' +>Success>[C2][94][06][02][08][30] = 1 Byte ??? + 4 Byte 'BootInfo' + Success>[48][65][6C][6C][6F][20][57][6F][72][6C][64][30] = 11 Byte 'BootMsg' +>Success
Was mich wundert ist das der AVR zweimal die BootInfo sendet. Das
unbekannte Byte 0xC2 ist ein Fehlercode.
Im Attachment mal eine geänderte Version der AVRootloader.exe. In dieser
behandle ich die evntl. auftretenden Nullterminatoren der BootMsg.
Gruß Hagen
Hallo Hagen,
mit der neuen Version von 'AVRootloader.exe' läuft es einwandfrei.
Das BootMsg nur ohne Verschlüsselung verwendbar ist war mir vorher nicht
klar.
Besten Dank für die schnelle Hilfe.
Gruß JoJo
BootMsg liegt zwischen BootInfo und BootKey. Bei der Aushandlung der
Verschlüsselung zwischen Bootloader und PC Software wird ein verschl.
Prüfcode benutzt. Dieser besteht aus BootInfo und ersten 4 Zeichen von
BootKey. Bevor die verschl. Daten an den AVR gesendet werden, muß dieser
Prüfsummen-Block an den AVR gesendet werden. Nur wenn die entl.
Prüfsumme identisch zu BootInfo + 4 Zeichen BootKey ist, kann der AVR
programmiert werden, bzw. akzeptiert der Bootloader die
Programmierungskommandos.
Liegt nun eine BootMsg zwischen BootInfo und BootKey so verändert dies
die Signatur.
Gruß Hagen
Hallo Hagen,
endlich bin ich wieder dazugekommen weiter zu machen.
Das Problem wurde mit LOCKBIT1 und LOCKBIT2 gelöst, d.h. diese Bits
werden gesetzt. Die BOOTLOCK01/02/11/12 dürfen nicht gesetzt werden, ist
nur ein Bit gesetzt, dann kann der Bootloader nicht richtig mit dem
Zielsystem verbinden.
Auf jedenfall arbeitet es sehr gut.
Danke nochmal für die ausführlichen Antworten.
Als Programmer nehme ich den ISP2-USB von E-LAB. Ein sehr gutes Teil mit
vielen Möglichkeiten.
Grüße
Hallo Hagen,
ich muß gestehen daß ich Deinen Code noch nicht so ganz verstehe. Den
anfänglichen Verbindungsaufbau durch Vergleich von [BootSign] und
anschließender Übertragung der [BootInfo]+ SUCCESS, sowie optionaler
[BootMsg] + SUCCESS zum PC habe ich soweit begriffen. Doch wie geht's
weiter? Ich glaube erkannt zu haben daß zuerst eine komplette Page ins
SRAM abgelegt wird, die im AVR berechnete CRC16 mit der vom PC
verchickten CRC16 verifiziert wird und anschließend der eigentliche
,Erase-Flash'-Vorgang gestartet wird.
OK,ich weiß - eigentlich läßt sich Dein Bootloader ohne nennenswerte
Modifikationen verwenden. Das ist bei meinem Projekt (Funkvernetztes
Multicontrollersystem) so nicht möglich. Ich würde mich deshalb sehr
freuen wenn Du mir das Protokoll im Detail beschreiben könntest.
Viele Grüße
Marcus
@ Hagen Re
Wie ich dem Quelltext entnehme, wird der ciphertext nach den ersten 16
Runden mit dem Initialisierungvektor (bzw. danach mit dem jeweiligen
vorherigen Ciphertext) xored um nach den zweiten 16 Runden nocheinmal
xored zu werden.
Ich würde gerne mal wissen wie Du darauf gekommen bist und ob Du bitte
einen Link mit einer Kryptoanalyse oder irgendeine andere Referenz dazu
nennen könntest?
@ Hagen Re
Also ich habe im Moment zwei Verständnisprobleme:
1. In Deine Datei AVRootloader.txt lese ich " Das zweifache XOR'ing des
Feedback vor den ersten 16 Runden und vor den zweiten 16 Runden
verändert den XTEA auf eine Weise das eine Alles oder Nichts
Entschlüsselung entsteht. Ändert sich also nur 1 Bit in den Daten so
wird der komplette Datenblock und alle auf ihn nachfolgenden Datenblöcke
falsch entschlüsselt."
Wenn ich CBC mode richtig verstanden habe, wäre das aber auch mit einem
einmaligen XOR vor jedem 32 Runden Zyklus gegeben. (Gemäß der unten
angegebenen Beschreibung von CBC in wikipedia).
2. Die Terminologie weicht von der mir bekannten ab.
Was ist mit Feedback gemeint? Wo bleibt der Initialization Vector?
Als Referenz bitte ich Dich, wenn möglich die beiden Seiten aus
Wikipedia zu verwenden:
CBC: http://de.wikipedia.org/wiki/Cipher_Block_Chaining_Mode
bzw. http://en.wikipedia.org/wiki/Block_cipher_modes_of_operation
XTEA: http://de.wikipedia.org/wiki/Extended_Tiny_Encryption_Algorithm
bzw. http://en.wikipedia.org/wiki/XTEA
@Klugscheisser:
1.) XTEA ist eine Stromverschlüsselung. Normalerweise benutzt man bei
diesen Ciphern keine Feedbackoperationen sondern wendet sie direkt auf
den Datenstrom an. Dabei wird mit XTEA aus einem Key ein Schlüsselstrom
erzeugt, quasi wie bei einem Pseudozufallsgenerator der Seed und der
Zufallsbitstrom, und dieser wird einfach per XOR mit den Daten
verknüpft.
2.) CBC ist ein Feedbackmodus der für die Blockverschlüsselungen
sinnvoll ist. CBC ist dabei ein sogenannter selbstsynchronisierender
Feedbackmodus, es gibt auch noch andere. Eine Blockverschlüsselung
zerlegt die Nachricht in Datenblöcke a zb. 8 Bytes und verschlüsselt
dann mit dem Cipher diese Blöcke, jeweils immer komplett separat ohen
Abhängigkeiten zwischen den einzelnen Blöcken. Das wäre der ECB Modus ->
Electronic Code Book Cipher Mode. CBC verknüpft nun diese Datenblöcke
untereinander. Angenommen wie haben eine Nachricht aus 4 Datenblöcken a
8 Bytes. Der zu entschlüsselnde Ciphertext wurde aber mit einem
Bitfehler empfangen der sich im 2. Datenblock befindet. Wird nun
entschlüsselt so passiert beim CBC folgendes: 1. Datenblock wird korrekt
entschlüsselt. 2. Datenblock wird auf Grund des Bitfehlers komplett
falsch entschlüsselt. 3. Datenblock kann unter Umständen ebenfalls noch
falsch entschlüselt werden, aber der 4. Datenblock wird wieder korekt
entschlüsselt.
Dh. Selbstsynchronisation bei einem Feedback Modus heist das sich ein
Bitfehler in einem Datenblock maximal diesen Datenblock + dem
nachfolgenden Datenblock falsch entschlüsselt. Alle nachfolgenden
Datenblöcke, wenn ohne Fehler empfangen, werden auch wieder korrekt
entschlüsselt.
3.) angenommen unser Ciphertext umfasst 10 Datenblöcke. Der 10.
Datenblock enthält eine Prüfsumme oder einen bekannten Identifier oä.
Wir möchten nun das wenn in einem der 10 Datenblöcke ein Bitfehler
entstanden ist das der letzte 10. Prüfsummendatenblock mit 100%
Sicherheit auch komplet zerstört wird. Dh. wir möchten das ein Bitfehler
im Ciphertext sich bis zum letzten Datenblock propagiert.
Dies zerstört die Selbstsynchronisation des CBC-Modus, dh. die
Selbstsynchronisation des CBCs ist für unserer Zwecke unerwünscht. Denn
4.) wie wollen mit XTEA nicht nur Daten schützen sondern deren
Integrität sicherstellen. Und dazu kann man sogennate CMACs benutzen,
also Message Authentification Codes basierend auf
Ciphern/Verschlüsselungen.
5.) Da XTEA eine Stromverschlüsselung ist habe aber die Plaintextdaten
keinen Einfluß auf den internen Zustand des Ciphers. Dh. der Copher
produziert nur vom Passwort abhängige Schlüsselströme. Bei einem
Blockcipher stellt der äußere Feedbackmodus, hier CBC, aber sicher das
der Ciphertext sowohl vom Passwort wie aber auch Datenstrom abhängig
ist. Und exakt das benötigen wir auch um überhaupt einen CMAC aufbauen
zu können, also die Abhängigkeit alle nachfolgenden verschlüsselten
Datenbytes vom Schlüsselstrom wie auch von den vorherig verschlüsselten
Datenbytes.
6.) also benutzt meine XTEA implementierung einen Feedbackmodus der im
Grunde genommen für XTEA als Stromverschlüsselung normalerweise garnicht
benutzt wird. Würde man diesen äußeren CBC Feedback nur anwenden nachdem
ein Datenblock durch XTEA verschlüsselt wurde dann würden sich die
Datenbytes der Nachricht aber nicht auf die internen Zustandsregister
des XYTEAs nicht auswirken. Es fehlt also eine grundlegende Bedingung um
mit XTEA+CBC einen CMAC errechnen zu können. Deshalb arbeitet mein XTEA
so das er die 32 Runden in 2x 16 Runden XTEA splittet. Der CBC Modus
wird nun zweimal angewendet, einmal vor der Entschlüsselung des
Datenblockes, für die ersten 16 Runden. Dann wird das
CBC-Feedback-Register erneut mit dem internen XTEA Registern
xor-verknüpft und nochmals die zweiten 16 Runden XTEA angewendet. Nun
ist sichergestellt das auf kryptographisch sichere Weise der Datenstrom
der Nachrichtenbytes in den internen Status des XTEAs eingearbrieitet
wurde. Wir können nun mit diesem XTEA Daten verschlüsseln wie auch die
Integrität der Daten durch einen CMAC überprüfen. Denn ein empfangener
Bitfehler führt mit 100% sicherheit immer dazu das alle nachfolgenden
Datenbits bishin zum letzen Datenblock fehlerhaft entschlüsselt werden
müssen.
Nun der Bootloader verschlüsselt mehrere FLASH Pages in folgender Weise:
1.) ein 8 Bytes Datenblock aus ZUfall wird erzeugt + 8 Bytes BootInfo
Signatur + ersten 4 Bytes des Schlüssel. Dieser Datenblock wird als
allerrster zum AVR gesendet und initialsiert die Entschlüsselung. Durch
die Zufallsbytes und der Eigenschaft der vollständigen Propagation
meiner XTEA+2xCBC Implementierung heist dies das unsere kompletter
Ciphertext randomisiert wurde. Also selbst wenn man die exakt gleiche
HEX Datei mit dem exakt gleichen Key merhmals verschlüsseln würde so
wäre der Ciphertext immer komplett anderst. Dies verhindert solche
Angriffe wie Known Plain-/Ciphertext/Reply/Exchange Attacks.
Zusätzlich serialisiert man das HEX auf den spezifischen AVR da die
nächsten 4 Bytes identisch zur BootInfo sein müssen. Dh. ein verschl.
HEX kann nur entschlüsselt werden wenn die im ersten Block enthaltene
BootInfo (Signatur des Bootloaders + AVR) identisch ist. Die letzen 4
Bytes im Datenblock sind die ersten 4 Bytes des Passwortes, also 32Bit.
Der AVR entschlüsselt also diesen ersten Datenblock und nur wenn diese 4
Schlüsselbytes identisch zum Key sind kann korrekt entschlüsselt werden.
Man detektiert somit also entweder einen Datenübertragungsfehler mit
1/2^32 Wahrscheinlichkeit oder aber man erkennt das mit einem falschen
Passwort gearbeitet wurde. Wichtig dabei ist es das dem Angreifer
keinerlei Möglichkeiten in die Hand gegeben werden einen Ciphertext
schneller als bei einer Brute Force Attacke brechen zu können und auch
das der Angreifer unsere "Prüfsummenlogik" mißbrauchen kann um seine
Brute Force Attacke zu beschleunigen. Das stellt der Zufallsseed und das
unbekannte Passwort als Verifier sicher.
2.) Nun sendet der AVR Blockweise die zu programmierenden FLASH Daten.
Dabei sind diese Daten in Blöcke a max. nutzbarere SRAM für Buffer
aufgesplittet. Bei einem SRAM mit 256 Bytes und einer FLASH Pagesize von
64 Bytes wird dieser Buffer also 192 Bytes groß sein und man kann 3
FLASH Pages am Stück übertragen. Der XTEA Cipher wird dabei nicht mehr
neu initialisiert sondern arbeitet mit der Initialisierung im Step 1.)
immer weiter. Somit hängt der Erfolg der korrekten Entschlüseelung
dieser Datenblöcke von allen vorherigen Datenblöcken ab. Der PC sendet
nun 192 Bytes an Daten die ge-flasht werden sollen und hängt als letzten
8 Bytes Datenblock wiederum einen Spezialdatenblock an. In diesem wird
auf die Addresse des FLASHs in dem die Daten geflasht werden sollen
verschlüsselt. Also auch die Addresse wohin man die Daten schreiben soll
sind verschlüselt gespeichert. Neben dieser Addresse (3 Bytes) sind in
diesem Datenblock wiederum die ersten 4 Bytes des Keys verschlüsselt,
quasi als Prüfsumme. Da mein XTEA+2xCBC, wenn er mit einem Bitfehler
dekodiert, alle nachfolgenden Datenbytes ebenfalls falsch dekodiert,
wird somit diese 4 Bytes Prüfsumme ebenfalls falsch dekodiert. Man kann
also mit einer Entschlüsselung nicht nur die Daten schützen sondern
sparrt sich einen extra Prüfsummen Algorithmus zu implementieren der
auch kryptographsich sicher sein muß ! Eine CRC ist ja kryptographsich
nicht sicher man müsste schon mit einem HMAC-> Hash Message
Authenfication Code arbeiten und somit würden wie einen Hashalgo. wie
SHA1 oä. implementieren müssen. Das sparen wir uns mit meiner
abgewandelten Form des XTEAs.
Einen kryptographischen Beweis der Sicherheit meiner Abwandlung kann und
werde ich dir nicht liefern können. Aber wenn du mal genau drüber
anchdenkst ist das auch nötig da ich nur die bekiannten Verfahren
entsprechend kombiniert habe. Ich gehe also davon aus das meine
Abwandlung nicht die Eigenschaften des XTEAs noch CBCs kryptrographisch
negativ beeinflusst. Immerhin wende ich wie gehabt CBC vor der
Entschlüsselung an, das ist Standard. Dann nach der Hälfte der
Entschlüsselung wende ich CBC erneut an und beeinflusse nur indirekt
über die XOR Operation den internen Status des XTEAs, das hat keinen
Einfluß auf die Sicherheit vom XTEA da wir nur die zu entschl. Daten
modifizieren.
Sogesehen basiert mein 2x CBC zwar auf CBC hat aber längst nicht mehr
die Eigenschaften eines normalen CBC Modus.
Gruß Hagen
PS: ich habe jetzt nicht nochmal alles quergelesen, Tip- und
Rechtschreibfehler kannste behalten ;)
Ich musste bei der Konstruktion verschiedene Aspekte berücksichtigen
1.) Algo. muß auf AVR performant und Resourcenschonend sein
2.) alle mir bekannten Angriffe müssen ausgeschlossen sein. Also zb. das
der Angreifer mal eben zwei Datenblöcke austauschen kann ohne das der
Bootloader dies detektieren kann. Denn sonst wäre es möglich "gezielt"
eine/mehrere verschl. Nachrichten neu zu rekombinieren, ohne das der
Angreifer überhaupt Ahnung davon haben muß was er da an Daten vor sich
hat.
3.) der Bootloader muß sicherstellen können das das verschl. HEX für
seinen Prozessor/Bootloadertypus erzeugt wurde.
4.) der Bootloader soll erkennen ob die Daten mit dem korrekten Passwort
verschlüsselt wurden
5.) oberste Priorität hat die Integrität der zu flashenden Daten. Dh. es
muß ausgeschlossen sein das der Bootloader falsche Daten flasht.
Also aus meiner Sicht, und ich habe mittlerweile über 5 Jahre
intensivste praktische Erfahrungen mit der Kryptographie, sehe ich zZ.
keinen erfolgversprechenden Angriff auf die durch meinen AVRootloader
geschützen Daten.
An der Dokumentation des kompletten Kommando-/Daten-/Verschl-
Protokolles muß ich noch arbeiten. Bitte habt Verständnis das das noch
ein bischen Zeit benötigt. Es ist für mich ein Aufwand von 6 Stunden
sowas zu programmieren aber ein Aufwand von weit mehr Stunden sowas zu
dokumentieren und nachfollziehbar zu erklären warum es so und nicht
anders konstruiert wurde.
Gruß Hagen
>Vielleicht erlaubst Du mir doch die Bitte, doch den Quellcode der>Windows-Software zu posten. Das wäre nett. (oder habe ich was>übersehen?)
Hm, logisch betrachtet hat das Eine nichts mit dem Anderen zu tuen.
Meine Intention die Windows-Software nicht frei verfügbar zu machen ist
nicht in der Kryptograhie begründet, also zb. einer Hintertür die ich
hätte einprogramieren können. Es ist eine Frage des Supportaufwandes und
eben auch der Kontrolle der Verbreitung des AVRootloaders. Ich würde
also vorschlagen das du mir eine PN sendest und wir dann per EMail
aushandeln ob und wie du meine Sourcen benutzen/bekommen kannst. Die PC
Software wurde mit Delphi5 also PASCAL programmiert.
>Wir können nun mit diesem XTEA Daten verschlüsseln wie auch die>Integrität der Daten durch einen CMAC überprüfen. Denn ein empfangener>Bitfehler führt mit 100% sicherheit immer dazu das alle nachfolgenden>Datenbits bishin zum letzen Datenblock fehlerhaft entschlüsselt werden>müssen.
Diese Aussage von mir ist nicht ganz korrekt. Denn eine 100%'tige
Propagation von Fehlern kann es garnicht bei dem Verfahren geben. Wenn
der letzte 8 Bytes Datenblock falsch entschlüsselt wurde dann haben wir
mit 1/2^64 Wahrscheinlichkeit eine falsche Fehlerantwort vom System
bekommen. Logisch da das interne Feedbackregister für den 2x CBC nur 8
Bytes und der interene Status des XTEAs ebenfalls nur 8 Bytes groß ist.
Somit ist dies identisch zu einer 64 Bit breiten Prüfsumme.
Der letze 8 Bytes Datenblock der nach den zu flashenden Daten gesendet
wird besteht aus folgenden Daten:
3 Bytes Addresse an die diese Daten geflasht/geeepromt werden sollen
1 Byte Datenblock-Längen-Korregier-Byte. Angenommen wir möchten nur 5
Bytes im FLASH speichern dann haben wir das Problem das XTA+2x CBC aber
immer mit volständigen 8 Bytes großen Datenblöcken arbeiten muß. Wir
müssen also diese 5 Bytes mit 3 Bytes Zufall auffüllen. Bei der
ENtschlüsselung benötigen wir dann die Information das von den soeben
entschl. 8 Bytes nur 5 Bytes von relevanz sind. Nun dieses
Datenbblöck-Längen-Korrekturbyte macht dies, es würde dann den Wertt 3
enthalten der dann am Ende der XTEA Prozedur von der
Datenlängenvariablen subtrahiert wird. Dies hat den Vorteil das wir nur
1 Byte an Datenmenge verbrauchen denn ansonsten müsste man eine
Längenangabe der zu flashenden Daten benutzen und das wären mehr als 1
Byte an Information die jedesmal pro Packet gespeichert werden müssen.
Davon abgesehen kann der Korrekturfaktor nur den Wert 0 bis 7 annehmen
und somit verbleiben 5 Bits ind diesem Byte die man noch anders benutzen
könnte, als Flags zb.
4 Bytes Verifier, das sind die ersten 4 Bytes des BootKey. Dieser wird
nach der ENtschlüsselung mit dem Bootkey verglichen und nur wenn
identisch arbeitet das System weiter.
Beim allerersten empfangen Datenblock (16 Bytes) besteht der letzte
Datenblock mit fast identischen Aufbau wie vorher beschrieben. Nur mit
dem Unterschied das in den ersten 4 Bytes nun die BootInfo gespeichert
wurde, statt Addresse + Korrektufaktor. Somit ist die
Überprüfungsfunktion dieser "Prüfsumme" bei der Initialsierung wie auch
Datenentschlüsselung fast identisch.
Dh. alle Datenblöcke im verschl. HEX File sind vom allerersten
Initialiserungsdatenblock abhängig und somit auch von den allerersten 8
Bytes des verschlüsselten Zufallsseeds.
Gruß Hagen
>1. In Deine Datei AVRootloader.txt lese ich " Das zweifache XOR'ing des>Feedback vor den ersten 16 Runden und vor den zweiten 16 Runden>verändert den XTEA auf eine Weise das eine Alles oder Nichts>Entschlüsselung entsteht. Ändert sich also nur 1 Bit in den Daten so>wird der komplette Datenblock und alle auf ihn nachfolgenden Datenblöcke>falsch entschlüsselt."
Alles oder Nichts aus Sicht der aktuellen Position eines Bitfehlers oder
Bitmanipulation. Würde also das allererste Datenbit gekippt im
Ciphertext dann soll der AVR die komplette Nachricht bis hin zum
"Prüfsummen"block komplett fehlerhaft entschlüsseln. Sogesehen: man kann
nur Alles oder Nichts korrekt entschlüsseln. Wir benötigen dieses
Feature für den CMAC.
>2. Die Terminologie weicht von der mir bekannten ab.>Was ist mit Feedback gemeint? Wo bleibt der Initialization Vector?
Feedback, das ist das zusätzlich mötige 8 Bytes Register das bei fast
jedem Cipher-Feedbackmodus nötig ist. Feedback heist dann das über
dieses Register und meistens per XOR Operation eine Verknüpfung der
Datenblöcke untereinadner erfolgt. Würde man dies nicht machen, also im
ECB Modus arbeiten dann kann man verschiedene Angriffe durchführen ohne
den Cipher real brechen zu müssen. Zb. wir haben eine verschl.
Banküberweisund die aus 2 Datenblöcken bestünde. Im ersten Datenblöck
steht Absender + Betrag drinnen. Im 2. Datenblock steht der Empfänger.
Wir veranlassen als Angreifer die Zielperson uns eine Banküberweisung zu
machen, auf unser Konto. Wir fangen aber jede der verschl.
Banküberweisungen der Zielperson ab. Diese tätigt nun eine Überweisung
der Miete. Wir fangen diese Nachricht ab und ersetzen den letzen
Datenblock mit dem Datenblock unserer Banküberweisung die an uns gehen.
Schon geht die Miete auf unser Konto. Das ist möglich weil die
Datenblöcke eben vollständig separat voneinander durch ECB verschlüsselt
wurden.
Der InitVector ist hardcoded alles Nullen. Denn real betrachtet senden
wir ja als ersten 16 Bytes Datenblock einen verschl. Block bei dem die
ersten 8 bytes verschlüselster Zufall ist. Damit ist das real der
InitVector aber eben verschlüsselt. Denn es ist ja egal ob wir den IV am
Anfang mit lesbaren/ungeschützen Zufall benutzen oder aber einfach den
ersten zu entschlüsselenden Datenblock per Zufall erzeugen und diesen
dann als quasi "nachfolgenden" IV benutzen. Vorteil ist dabei das wir
das System kryptogaphisch damit stärken, ich vertrete also die
Auffassung das es besser ist mit einem fixen IV also Nullen o.ä. zu
benutzen und dafür den ersten oder sogar noicht den 2. Datenblock
einfach mit Zufall zu füllen und verschlüsselt zu speichern. In beiden
Fällen haben wir technsich betrachtet den gleichen Aufwand nur ist bei
meiner Methode der IV auch noch durch den Cipher geschützt.
Gruß Hagen.
Die zweistufige CBC Verknüpfung hat den Vorteil das man nur ein 8 Bytes
großes Feedback Register benötigt. Wollte man die gleichen Features mit
anderen Ciphermodis, die auch dafür konstrueirt wurden (also für CMAC)
implementieren, dann benötigt man größere Register, also mehr an
Variablen. Das wird für die Optimierung auf dem AVR den Registerdruck
auf die CPU erhöhen und somit mehr Resourcen verbrauchen und damit die
Performance reduzieren. Es ist dann einfacher XTEA als Funktion jeweils
mit auf 16 reduzierten Rundenanzahl auf zwei Aufrufe zu implementieren.
Und dann eben im Zwischenschritt das CBC-Feedbackregister erneut zu
manipulieren.
Mein XTEA benutzt also ein Feedbackmodus der auf CBC als Operation
basiert aber im Grunde ganz andere Eigenschaften des Gesamtsystemes
erzeugt. Damit ist es kein CBC mehr basiert aber analytisch auf dem
Kryptobeweis des CBCs.
Gruß Hagen
@ Hagen Re
Ich möchte Dir nochmals für die Mühe danken, die Du Dir mit der
Beantwortung der Fragen machst.
Mein eigener Bootloader wird sicherlich um einiges anders aussehen.
Dennoch lese ich Deinen Code und Deine Antworten mit grossem Interesse.
XTEA wird es halt auf jeden Fall, da der Code dafür wirklich extrem
klein sein kann.
Das Du die Verbreitung der Windows-SW kontrollieren möchtest akzeptiere
ich selbstverständlich. Wäre halt nett gewesen, ist aber nicht
notwendig.
Melde dich hier an und sende mir eine PN und dann kannst du die Sourcen
haben. Ich bin immer daran interessiert wenn sich dritte Personen die
Zeit nehmen und meine Sourcen analysieren und somit eventuelle Fehler
finden und beseitigt werden. Dasa erhöht ja die Anwendungssicherheit und
verifiziert meine Arbeit. Davon abgesehen könnten wir so per EMail noch
mehr Erfahrungen und Wissen austauschen und eventuell kann auch ich dir
gerade bei den Kryptosachen noch par Tipps geben.
>XTEA wird es halt auf jeden Fall, da der Code dafür wirklich extrem>klein sein kann.
Falls du ihn kürzer als meine Implementierung bekommst dann wäre ich dir
sehr dankbar wenn du mich daran partizipieren ließest.
Gruß Hagen
Hi Hagen,
habe heute mittag deine Soft runtergeladen, a bissel gelesen (bin
lesefaul)
parameter geaender (auf 2te rs232 des 128 mit max232)
Bootloder programmiert und funktioniert !,
!!! VIELEN DANK FUER DIE TOLLE SOFT !!!!
vlg
Charly
Ich habe da noch eine kleine Frage:
Man kann ja einen Bootstring angeben, der z.B die Hardwareversion
enthalten kann.
Wenn ich jetzt mit der DLL eine neue Software in den Controller laden
möchte, und der Bootstring nicht korrekt ist (z.B. falsches Gerät für
die Software), kommt bei mir keine Fehlermeldung, sondern es passiert
nichts.
Kann ich irgendwie abfragen, welcher Bootstring in der Hardware steckt
bevor ich mit dem Upload beginne? So könnte ich dann je nach Bootstring
eine andere Software auf den Controller laden.
Louis
Hi Louis,
du beziehst dich auf obigen Post mit der BootMsg: ?
Du benutzt die AVRootIntf.DLL und allozierst mit OpenAVRootloader(...)
ein IAVRootloader Interface. Dieses Interface hat mehere Sub-Interfaces
wie .CommandSet: ICommandSet oder eben .Device: IDevice. Über dieses
.Device Member des AVRootloader Interfaces kommst du an die .Info:
WideString ran. Nach dem also über .DoConnect() eine Verbindung
aufgebaut ist, kann man auf diese Info = BootMsg zugreifen. Oder aber in
deinem IApplication Interface die "Callback-.Methode" .Changed. Diese
Methode .Changed wird immer dann aufgerufen wenn sich zb. im
Verbindungsstatus verändert hat.
Alle Daten in .Device stehen auch nach einen .Disconnect() weiter zur
Verfügung. Erst beim nächsten .DoConnect() werden diese Daten
aktualisiert. Du kannst also ohne Probleme auf .Info zugreifen um damit
deine AVRs noch mehr zu serialisieren usw. Du hast über .Device Zugriff
auf alle Daten die auch meine PC-Software anzeigen kann.
Gruß Hagen
1
// connected Device Information, part of IAVRootloader
Aber beachte dabei das mit der Nutzung von BootMsg: keine XTEA
Verschlüsselung mehr nutzbar ist. Man könnte aber mit wenigen Änderungen
im Source BootMsg auch mit Verschlüsselung benutzen. Das habe ich aber
nicht weiter ausgebaut da der Trick mit BootMsg: quasi nur ein
Abfallprodukt war. Warum mit BootMsg: die Verschl. nicht mehr richtig
funktioniert habe ich in einem der verherigen Postings erklärt.
Gruß Hagen
Hallo hagen,
kann man den bootloader auch in externen anwendungen verwenden???
Habe ein VB 2008 Programm indem würde ich gerne eine update funktion
einbauen und dann die firmware flashen.
Kannst mir bitte mal n code exampel schicken oder so???
danke
Uff ich denke VB2008 sollte DLLs laden können und mit statischen
Interfaces umgehen können. Ich habe nur ein Beispiel für Delphi
beigepackt und mit VB2008 kenne ich mich im Grunde nicht aus. Meine Zeit
als ich mit Basic zu tun hatte war ja vor 20 Jahren, oder länger.
Du müsstest dann nur noch die Interfaces in AVRootIntf.pas nach VB
portieren. Ich habe dabei sehr darauf geachtet möglichst mit den
Standard Datentypen zu hantieren und alles stdcall deklariert wie es bei
COM/DCOM/ActiveX Controls nach MS Standard üblich ist.
Allerdings sind es eben statisch importierbare Interfaces und keine von
IDispatch ableiteten Interfaces wie bei leicht zu importierenden
COM/ActiveX Controls. Dazu hätte ich eine TypeLib bauen müssen und das
war mir einfach zuviel Overhead.
Ich meine du solltest es einfach mal probieren und wenn du möchtest
können wir bei EMail dann gemeinsam über deine Sourcen schauen. Also
verstehen würde ich ein VB Script schon nur dir jetzt ein
funktionierendes Beispiel liefern nicht. Dazu müsste ich mich erst
einarbeiten und das kostet zuviel Zeit.
Aber gehen solltes es wenn VB2008 DLLs importieren kann und Interfaces
unterstützt, was ich denke auch so ist.
Gruß Hagen
Hallöle!
Ich habe hier folgendes Problem:
Habe alle Einstellungen wie in AVRootloader.txt beschrieben gemacht,
kompiliert und mangels eines "AVRStudio-kompatiblen Brenners"
mit einem STK200-Parallelport-Brenner unter Bascom in den Controller
(Mega32) geschubst.
Ging auch gut und hat auch gefunzt. Allerdings nur EINMAL!
Scheinbar hat die zu brennende hex-Datei die Bootloader-Datei wieder
überschrieben.
Ich kann mich erinnern, dass man beim Microsyl-Bootloader erst einige
Einstellungen (Fusebits setzen) durchführen musste um den Bootloader in
einem geschützten Bereich zu verschieben/installieren zu können,
so dass er nach dem brennen immer noch da ist.
Könnte mir bitte jemand die Anleitung posten, wie ich das anstelle
(ihn im "Bootsector" zu installieren).
Ich würde den Bootloader gern als Ersatz für den Parallelportbrenner
benutzen, da auch teurere Notebooks nicht mehr zwingend nen Parallelport
haben.
Mit nem USB-RS232-Kabel funktioniert der nämlich Bootloader tadellos.
Danke
Du musst bei allem Megas die BOOTSZ Fuses entsprechend setzen. Wenn du
mit AVRStudio das ASM kompilierst dann wird im Message-Window auch
angezeigt welche BOOTSZ Fuses du setzen musst. Das hängt ja von der
Größe des compilierten Bootloaders ab. Zusätzlich kannst du dann noch
die Lock-Fuses setzen um den Mega dicht zu machen.
Leider kann ich dir aber nicht exakt sagern welche Einstellungen du bei
deinem Programmer treffen musst.
Machst du diese Einstellung nicht, so kannst du einmal die
AVRootloader.HEX programmieren und dann darüber nur einmal ein eigenes
Progranm über den Bootloader laden. Danach springt der AVR immer sofort
das eigen Program an und nicht zuerst den Bootloader.
Gruß Hagen
Hallo Hagen,
können wir Deine AVRootIntf.DLL etwas ausbauen ?
Es wäre schön wenn man zum Beispiel die Com Port Geschichte auch umgehen
kann um direkt über USB zu Flaschen (Stichwort: FTDI o. LPC...).
Aktuell wollte ich nämlich gerade einen Intel HEX Loader nachbauen hab
aber Deinen Thread gesehen und glaube das ich mir das sparen könnte.
Und ich hab gesehen wir nutzen beide Pascal könnte Dich also
unterstützen.
Gruß Gerry
@Gerry:
>Es wäre schön wenn man zum Beispiel die Com Port Geschichte auch umgehen>kann um direkt über USB zu Flaschen (Stichwort: FTDI o. LPC...).
Garnicht nötig, wird schon unterstützt ;)
Konzeptionell sind in AVRRootloader.DLL drei Interface implementiert.
1.) IAVRRootloader
dieses Interface wurde durch mich entwickelt und setzt die abstrakte
highlevel Schnittstelle der Bootloader Funktionen um. Es enthält also
das Kommunikationsprotokoll des Bootlaoders usw.
2.) ICOM
dieses Interface erledigt die serielle Kommunikation. Es ist die
Verbindungsschnittstelle zwischen IAVRRootloader und dem seriellen
COM-Port.
Auch dieses Interface habe ich komplett durchimplementiert.
3.) IApplication
Diese abstrakte Schnittstelle muß der Programmierer der die beiden
vorherigen Schnittstellen anwenden möchte implementieren. Es übernimt
die Aufgabe der Abfrage alle Parameter.
Einer der Parameter die das IAVRootloader Interface vom IApplication
Interface abfragt ist das Kommunikations-Interface, also die ICOM
Implementierung.
Wenn man nun per USB kommunizieren möchte so braucht man nur ein eigenes
ICOM Interface zu bauen das nicht auf dem COM Port aufsetzt sondern auch
USB.
Das eigene IApplication Interface wird in der Methode
function OpenCommunication: ICOM; stdcall;
also ein eigenes ICOM Objekt zurückgeben das dann auf die USB
Schnittstelle aufsetzt. Normalerweise wird jetzt die Funktion OpenCOM(),
importiert aus der DLL, aufrufen, und damit meine standardmäßige
Implementierung auf dem seriellen COM Port.
Du musst also in deinem IApplication Interface (Callbacks) nur die
OpenCommunication() abändern und dort eine eigene Implementierung eines
ICOM Interfaces das auf USB aufsetzt.
Gruß Hagen
@Gerry:
soweit erstmal so gut. Man muß aber nun noch überprüfen ob das
eigentliche Kommunikationsprotokoll des Bootloaders für USB auch
konzeptionell tauglich ist. Im zb. ICOM Interface sind zb. die Timeouts
der Kommunikation einstellbar. Davon macht das IAVRootloader Interfcae
intern regen Gebrauch, da nur so sicherzustellen war das alle performant
und denoch stabil läuft.
Auch die einzelnen Protokollschritte des Bootloaders sind auf ein
serielles Protokoll, wie die RS232, aufsetzend. Ich denke aber das es
relativ einfach sein müsste auch auf USB aufsetzen zu können, Hauptsache
es ist ein serielles USB Protokoll, und das ist imer der Fall.
Denoch muß die überprüft werden und das geht im Grunde nur wenn man
erstens Ahanung vom USB hat und zweitens es praktisch auch versucht.
Gruß Hagen
Hallo Hagen,
hab gerade gesehen das der Bootloader in ASM ist.
Tja und ASM ist für mich nur kryptisch. Da ja die Komunikation nicht
über uart läuft müste also der Bootloader umgeschrieben werden und das
kann ich definitiv nicht in ASM.
Gerry
Ja der AVR Teil ist in Assembler, das ist eine zwingende Voraussetzung
wenn man sowas effizient haben möchte, bzw. das letzte Quentchen an
Optimierung haben möchte.
Die obige Vorgehensweise macht dann Sinn wenn man zb. per USB direkt
einen USB-Serial-Wandler ansprechen möchte. Auf AVR Seite hat man ja
sowieso alles auf RS232. Möchte man dies aber abändern dann muß man
natürlich auch den Assembler Source des Bootloaders anpassen. Das werde
ich aber mit Sicherheit nicht machen wollen ;)
Allerdings dürfte auch das garnicht mal so schwierig zu ändern sein, es
gibt defakto nur 3 Stellen im Source die angepasst werden müssten.
1.) Baudrate-Detektion gleich am Anfang im Source
2.) die Sub-Funktion getc() um ein Zeichen vom der RS232 zu lesen
3.) und putc() um ein Zeichen in die RS232 zu schreiben
Man könnte durch die Änderung der letzten beiden Punkte zb. auch die
HW-UART der AVRs benutzen, oder eben auf USB Hardware zugreifen, falls
sie im AVR vorhanden ist.
Gruß Hagen
Hagen Re wrote:
> Die obige Vorgehensweise macht dann Sinn wenn man zb. per USB direkt> einen USB-Serial-Wandler ansprechen möchte. Auf AVR Seite hat man ja> sowieso alles auf RS232. Möchte man dies aber abändern dann muß man> natürlich auch den Assembler Source des Bootloaders anpassen. Das werde> ich aber mit Sicherheit nicht machen wollen ;)
Nun bei mir läuft nichts über Uart :) Alles schön Parallel
>> Allerdings dürfte auch das garnicht mal so schwierig zu ändern sein, es> gibt defakto nur 3 Stellen im Source die angepasst werden müssten.> 1.) Baudrate-Detektion gleich am Anfang im Source> 2.) die Sub-Funktion getc() um ein Zeichen vom der RS232 zu lesen> 3.) und putc() um ein Zeichen in die RS232 zu schreiben>
Ja, ABER in ASM ;)
Kein Problem, werd wohl Ende der Woche meinen BL fertig haben.
Schade so erfindet man das Rad jedesmal neu.
>Kein Problem, werd wohl Ende der Woche meinen BL fertig haben.>Schade so erfindet man das Rad jedesmal neu.
Naja, es hängt halt von den Prioritäten ab die man sich setzt. Man hat
dann zwar zwei Räder aber für jeweils unterschiedliche Konzepte. Eine
wichtige Priorität in meinem Bootloader war es eben ihn sehr kompakt zu
bekommen und das geht mit zb. C eben längst nicht so kompakt wie in
Assembler. Ich habe bewusst den Punkt der Portierbarkeit, der Lesbarkeit
für viele Anwender, zurückgestellt. Das ist eben dann der Nachteil den
ich in Kauf nehmen musste. Ansich kein Nachteil für mich und dem Wunsch
im Hobby einen eigenen Bootloader zu haben. Aber eben für diejenigen
Nutzer denen ich im Nachinein frei den Bootloader zur Verfügung gestellt
habe und kein Assembler verstehen.
Gruß Hagen
tolle Arbeit!!!!!!!!!!!! richtig genial!!!!!!!!!!!
Nun zu meinem Problem. Habe einen ATMEGA162. Wenn ich die
Verschlüsselung deaktiviere also UseCrypt=0 dann kann ich den hex über
den Bootloader auf den ATMEGA162 flashen, wenn ich aber UseCrypt=1 setzt
und dann versuche die acy-Datei drauf zu flshen bringt er mir die
Meldung cmd.SetBuffer.ResCheck(2) Error: Decryption failed. Kann jemand
damit etwas anfangen?
Jo ich ;)
Wie hast du die ACY Datei erzeugt ? Normalerweise geht das so:
1.) AVR mit RS232 verbinden
2.) PC-Bootloader starten
2.1.) dort dein HEX als FLASH-File eintragen/Auswählen
2.2.) nun Compile Button drücken
2.3.) PC Software verbindet mit AVR und fragt somit alle Informationen
ab
2.4.) nun wird aus der HEX Datei eine ACY Datei erzeugt
2.5.) PC Software trennt sich vom AVR
So ist sichergestellt das das ACY File auch zum Bootloader im AVR passt.
Nur auf AVRs die den gleichen Bootloader installiert haben kann dieses
ACY installiert werden.
Wichtig dabei ist das das Passwort das die PC Software benutzt, steht
wenn man es möchte in AVRootloader.INI unter Password, identisch mit dem
Passwort in AVRootloader.ASM ist und diese ASM erneut auch compiliert
wurde.
Ich schätze das gerade letzeres bei dir nicht der Fall ist.
Also starte PC Software und drücke Button "Make Pasword". Danach erzeugt
die Software per Zufall ein 16 Bytes Schlüssel. Dieser wird in die
Zwischenablage kopiert, in die AVRootloader.INI gespeichert wenn du es
wünscht und auch sofort in die AVRootloader.ASM Datei geschrieben.
Danach mit AVRStudio diese AVRootloader.ASM erneut kompilieren und das
daraus entstehende HEX File auf den AVR installieren.
Sollte das Passwort der ACY Datei nicht identisch zum Passwort im AVR
sein, oder die verschlüsselten AVR-Device-Informationen im ACY File
nicht identisch zum Bootloader im AVR sein, dann tritt dieser Fehler den
du beschrieben hast auf.
Gruß Hagen
Ach und nochwas:
du hast die AVRootloader.ASM mit Verschlüsselung konfiguriert, also
UseCrypt=1
UseCryptFLASH=1
UseCryptEEPROM=1
UseSRAM=0
und ein neues Passwort erzeugt hast, per PC Software, und alles im
AVRStudio neu kompiliert hast.
Flashe nun AVRootloader.HEX in den AVR und setze die Fuses. Dann
startest du die PC Software und verbindest m it dem AVR -> Button
"Connect". Nun wählst du als FLASH File deine HEX Datei aus und drückst
den Button "Program". Die PC Software wird nun im Hintergrund erkennen
das der AVR nur mit Verschlüsselung programmierbar ist und somit dein
HEX File live im Hintergrund erstmal in eine im Speicher liegende ACY
Datei compilieren und diese dann flashen. Wenn das bei dir geht dann
hast du vorher mit falschen Passwörtern gearbeitet ;)
Gruß Hagen
ja die Postings habe ich gesehen, wie gesagt ohne Crypt geht alles nur
mit Encrypt geht nix.
Habe es genauso noch ein paar mal gemacht, er bringt immer den gleichen
Fehler. Psswort ist das gleiche, habe ich schon überprüft. Ich habe die
include m162def.inc ausgewählt.
Uff mal im Ernst, warum muß ich immer die Probleme Anderer lösen, geht
nicht gegen Dich oder Andere. Ist eher ne Frage das ich ein bischen
jammern möchte ;)
Also zeige mal den Anfang der Konfiguration der AVRootloader.ASM und
dann alles an Daten am Ende, also ab BootInfo: dieser Datei.
Könte es sein das du eine BootMsg, wie obem im Thread beschrieben,
benutzt ?
Achso, die Fuses sehen gut aus.
Gruß Hagen
>HAbe so gemacht und das hex ausgesucht, er hat nicht erkannt das es ein>hex ist und wieder die gleiche FEhlermeldung gebracht.
Doch hat er erkannt sonst würde im Log nicht dieser Fehler auftauchen.
Poste auch mal bitte den kompletten Inhalt des Log-Memos.
Gruß Hagen
@Luis:
>Man kann ja einen Bootstring angeben, der z.B die Hardwareversion>enthalten kann.>Wenn ich jetzt mit der DLL eine neue Software in den Controller laden>möchte, und der Bootstring nicht korrekt ist (z.B. falsches Gerät für>die Software), kommt bei mir keine Fehlermeldung, sondern es passiert>nichts.
Du könntest das aber jetzt schon ohne Änderungen an der Software machen.
Dafür gibt es zwei Wege:
1.) ohne Verschlüsselung:
Du benutzt für dein Gerät eine eigene BootVersion. Also in
AVRootloader.ASM die BootVersion verändern, auf größer 2. Nun startest
du die PC-Software, wählst dort dein HEX+EEP File für das Gerät aus und
kompilierst eine ACY-Datei. Wenn man eine ACY-Datei kompiliert dann
verbindet die PC-Software erstmal mit dem Bootloader im AVR und fragt
dort die BootInfo ab, also auch die BootVersion. Diese Daten stehen dann
im ACY-File und diese wird verteilt. Später programmiert man den AVR mit
dieser ACY-Datei und nur wenn die BootInfo im AVR identisch zu den Daten
im ACY-File sind kann diese den AVR programmieren.
2.) mit Verschlüsselung:
Du erzeugst für dein Gerät eine neue AVRootloader.ASM Datei mit einem
nur für diese Geräte gültigen Passwort, und Verschlüsselung ist
eingestellt. Dazu in der PC-Software den Button "Make Password" drücken
und das .ASM im AVRStudio erneut kompilieren.
Danach mit der PC-Software aus deinem HEX+EEP File eine ACY-Datei
erzeugen. Auch in diesem Moment steht im ACY die Kopie der BootInfo aus
dem AVR aber zusätzlich werden alle Daten mit dem Passwort
verschlüsselt. Diese ACY Datei kann dann später nur auf den Geräten
installiert werden die das gleiche Passwort benutzen. Zusätzlich können
deine Kunden nun über die PC-Software und voreingestellte Parameter (zb.
per Windows-Verknüpfung) in einem Rutsch diese verschl. ACY-Datei
programmieren. Aber nur du kannst, weil du als Einziger das Passwort
kennst, solche ACY-Dateien für deine Geräte erzeugen. ABER! beachte das
du in diesem Fall keine BootMsg: benutzen darfst, sonst geht das mit der
Verschl. nicht.
Gruß Hagen
Danke Hagen, es lag an der BootMsg! Habe ich jetzt raus gemacht und es
geht! Es soll nicht nur bei danke bleiben. Möchte dich für deine
Bemühungen entschädigen. Ich schreib dir gleich ne PN
Hallo Hagen,
hab heute Deinen Bootloader mal ausprobiert und habe keine Problem damit
gehabt. Compiliert, gelinkt, geflasht und dann gebootloaded ... Einfach
klasse!
Vielen vielen Dank für Deine Arbeit!
Beste Grüße,
Michael
Hallo Hagen,
ich versuche deine AVRootloader.dll mit einem VB Express Programm
anzusprechen.
Die DLL kann ich wie folgt einbinden.
1
Public Declare Function OpenAVRootloader Lib "AVRootLoader.dll" Alias "OpenAVRootloader" () As String
Das Programm meldet mir aber sobald ich die Funktion verwende einen
Fehler.
Ich weiß nicht genau was oder ob die Funktion von dir was zurück gibt.
und was ich ihr übergeben muss.
Hast du vielleicht eine Schnittstellenbeschreibung zu der DLL?
Ich glaube das würde auch anderen helfen, die versuchen mit VB, C/C++
oder C# usw. die DLL anzusprechen.
Ich kann leider überhaupt kein Delphi.
Vielleicht kannst du auch kurz erläutern wie die prinzipielle
Vorgehensweise bei der Initialisierung der Verbindung ist.
MfG Andy :)
PS: Der Bootloader ist echt klasse. Auch die Anleitung wie man ihn
benutzt und einrichtet.
So wie du das versucht hast kann das nicht funktionieren.
Diese Funktion erwartet ein Interface und gibt auch ein Interface
zurück. Das sind ähnliche "Datenstrukturen" wie Objekte, genauer gesagt
sind es Schnittstellen von Objekten. Dafür gibt es einen Standard von MS
damit eben verschiedene Programmiersprachen über diesen Weg kompatibel
sein können.
Leider kenne ich mich in diesem Fall nur mit Delphi/PASCAL sehr gut aus,
vielleicht noch ein bischen C. Aber wie es heutzutage in VB, ergo BASIC
geht weiß ich leider auch nicht.
Ein erfahrener Programmierer in VB und Delphi sollte in der Lage sein an
Hand der AVRootIntf.pas Source diese zu portieren.
Die einzigen beiden normal exportierten Funktionen in der DLL sind also
Funktionen die solche Interface-Objekte erzeugen und zurückgeben. Die
eigentliche Schnittstelle steckt dann als Methoden in diesen Interfaces.
Deren Deklaration, also Namen, Typen, Parameter, Rückgabewerte und
Aufrufkonventionen (stdcall, cdecl usw.) kann man in der AVRootIntf.pas
Source nachlesen. Dieser Source ist damit auch die Dokumentation der
DLL.
Gruß Hagen
Ok danke.
Ich hab in der VB Hilfe auch schon was zu diesen Interface Typen
gefunden.
Ich werds einfach weiter versuchen.
Wenn ich was zustande bekomme werde ich berichten.
Grüße
Melde dich per PN bei mir, einfach auf den blauen Namen klicken bei
meinen Postings.
Ein bischen kenne ich mich ja schon mit VB aus und somit könnte ich dir
helfen bei der Translation nach VB. Ich habe es halt nicht installiert
und normalerweise rücke ich auch nur Sourcen raus die ich auf
Korrektheit verifiziert habe. Per EMail könnten wir quasi gemeinsam am
Problem arbeiten, bis es läuft. So hätte auch ich einen Vorteil dabei.
Gruß Hagen
Hallo Hagen,
Ich habe eben Deinen Bootloader in der Version vom 19.9.08 (soviel ich
gesehen habe die aktuellste) auf einem Crumb256 Modul von chip45
getestet.
Ich muss sagen, das ist der erste Bootloader der auf Anhieb bei mir
gelaufen ist, alle Achtung!
Der Crumb256 hat ja bereits einen FTDI-Chip mit drauf der auf USART0
verdrahtet ist. Ich habe also Deinen Code einfach auf die dem USART0
zugeordneten Pins auf Port E, Pins 0 und 1 geändert und siehe da,
funktioniert.
Aber ein kleines Poblem ist noch aufgetaucht:
Vorsichtshalber hatte ich zunächst in AVRootloader.exe nur 38400 Baud
ausgewählt. Das Programmieren des Flash-Speichers klappte auch
problemlos, nur das Auslesen des EEPROMs oder SRAMs endete immer mit der
Fehlermeldung "Cmd.ReadEeprom.ReadByte(1) ICOM: read error" bzw.
"Cmd.ReadRam.ReadByte(1) ICOM: read error".
Versuche mit dem Parameter Base in "AVRootloader.ini" und verschiedenen
Baudrates ergaben, dass die Defaulteinstellung "Base = 50" nur für
115200 Baud passt, dann funktioniert alles fehlerfrei.
Wenn ich aber z.B. nur mit 38200 Baud arbeiten will, muss ich Base
deutlich erhöhen. Mit 100 funktioniert's sicher, die genaue Grenze habe
ich nicht ermittelt.
Gruß Gerd
Je geringer die Baudrate desto höher sollte der Wert in Base sein. Dies
ist das Basistimeout zum Warten auf 1 ASCII Zeichen beim Empfang über
die Schnittstelle. Intern werden die Timeouts aus der Baudrate
errechnet, allerdings ohne die Berücksichtigung der eventl. zusätzlichen
Timeouts die durch den USB und dessen Treiber entstehen. Deren
Berechnungsmethoden sind nicht öffentlich und höchstwarscheinlich von
Hersteller zu Hersteller auch noch unterschiedlich.
Letzendlich wird man über die Parameter in der INI einen Kompromiß für
die eigene Hardware/Treiber Kombination finden müssen der einerseits die
Gesamtperformance des Bootloaders nicht so sehr negativ beeinflusst und
andererseits die Stabilität des Bootloaders (Anzahl Timoutfehler)
negativ beeinträchtigt. Ich bevorzuge natürlich die Stabilität und
Zuverlässigkeit statt die um par Bruchteile einer Sekunde schnellere
Programmierzeiten.
>Fehlermeldung "Cmd.ReadEeprom.ReadByte(1) ICOM: read error" bzw.>"Cmd.ReadRam.ReadByte(1) ICOM: read error".
Exakt diese Fehlermeldungen beeinflußt man über den Wert Base in der INI
Datei. Sie entstehen weil die PC-Software voeher ein Kommando an den AVR
gesendet hat und nun auf eine Antoert vom AVR warten muß. Minimal wartet
die PC-Software den Wert in Base in Millisekunden oder die Zeitspanne
die sich aus der Baudrate und der Übertragung von 1 ASCII Zeichen
ergäbe.
Gruß Hagen
Hallo Hagen !
Erstmal dickes lob für den AVRootloader ! Ist echt spitze !
Ich hab ein kleines Problem bei der Implementierung eines anderen Icom
Interfaces !
Und zwar will ich auf einen ftdi232 per D2xx-Treiber zugreifen.
Ich komme aber mit der einbindung als ICom nicht ganz klar !
Wie genau muß ich denn die funktion Opencommunication in der AVRootinf
anpassen bzw. wie kann ich die neue funktion richtig einbinden.
Delphi meldet mir immer:
Error: Application.OpenCommunication provides no communication interface
Die Funktion zum öffnen der Kommunikation über D2xx hab ich übrigens aus
den Delphi-Quellen auf der Homepage von FTDI (D2xxappl.pas)!
Wäre klasse wenn du oder jemand anderes eine Antwort hätte !
Gruß Stefan
function ReadCRC(const ProcName: WideString = ''): Bool; stdcall;
44
end;
Natürlich implementierst du alle Methoden durch.
2.) du stellst ja eine IApplication Schnittstelle zur Verfügung, als
ebenfalls ein Object wie zb. ein TForm das die IApplication
implementiert. Deren Methode function OpenCommunication: ICOM; stdcall;
sähe dann so aus:
1
function TForm1.OpenCommunication: ICOM;
2
begin
3
Result := TCOM.Create('COM1', Self);
4
end;
Obiges TCOM Objekt ist ein Copy aus meinen internen Sourcen zum Zugriff
auf die RS232.
3.) falls du Fragen bzgl. den Methoden, Parameter und Arbeitsweise der
ICOM Methoden hast, dann frag.
Gruß Hagen
Hallo Hagen !
Danke für die schnelle und ausführliche Antwort !
Leider hab ich tatsächlich ein paar Verständigungsprobleme bezüglich der
ICom-Schnittstelle !
Wenn ich das richtig interpretiert habe setzt deine TCom Methode auf der
Icom Methode auf und führt den Verbindungsaufbau zum AVR anschließend
über deine Dll aus, oder ?!
Vielleicht habe ich mich auch nicht richtig ausgedrückt:
Für den FTDI gibt es zwei Arten von Treiber. Einen der die
Com-Schnittstelle emuliert (benutze ich bisher und funktioniert soweit
gut) und einen proprietären USB-Treiber der eine Eigene dll für den
Verbindungsaufbau mitbringt. Dieser enthält bereits Methoden um eine
Verbindung zum FTDI aufzubauen (allerdings nicht über eine
Com-Schnittstelle, sondern über zb. die ID des FTDI).
Ich habe mir das so vorgestellt das ich die Verbindung zum FTDI über die
Dll von FTDI herstelle und die Datenübertragung dann von deiner dll
ausführen lasse. Oder habe ich da einen Denkfehler drin ?
Ich hab als anhang mal den Delphi-Source von FTDI angehängt aus dem ich
die Datenverbindung übernommen habe.
Ich kann mir gut vorstellen das du genug zu tun hast, aber vielleicht
findest du ja mal die Zeit einen Blick darein zu werfen und mir
vielleicht einen anhaltspunkt zu geben wie ich das implementieren kann.
Ich werde es auf jedenfall weiter versuchen und wenn ich eine Lösung
gefunden habe diese auch weitergeben da es bestimmt genügend Leute gibt
die Ihren AVR per USB(FTDI) ansteuern möchten.
Ich bin natürlich trotzdem über jeden Hinweis dankbar !
Gruß Stefan
Hi Stefan,
als erstes vorweg: möchtest du mit geringsten Aufwand arbeiten dann
benutze den Virtuellen COM Port Treiber den der FTDI liefert. Dann musst
du diesen nur im System installieren und kannst sofort mit dem
bestehenden AVRootloader damit arbeiten, also ohne irgendwelche
Programmierung.
Die Frage ist eben was für Vorteile du dir durch die direkte Ansteuerung
des FTDIs auf Windows Seite erhoffst. Schneller als der viruelle COM
über RS232 wirds wohl nicht gehen (denke ich zumindest) und der Aufwand
den virtuellen COM Port Treiber im System zu instalieren (ohne brauchst
du ja nur die FTDI-DLL) ist auch nicht so enorm.
Die Schnittstellen des AVRootloaders bestehen aus vier Interfaces:
IApplication, muß durch den Benutzer (also dir) implementiert werden.
Par Postings weiter oben findest du einen Delphi Source der das
demonstiert.
ICOM, das ist die native Schnittstelle zum eigentlichen
Kommunikationstreiber unter WIndows. Für den Zugriff auf RS232 = COM
Schnittstellen habe ich schon alles implementiert. Für den direkten
Zugriff auf zb. deine FTDI-DLL musst du diese ICOM Schnittstelle durch
ein eigenes Objekt implementieren. Eine beispielhafte Deklaration eines
solchen Objektes habe ich im vorherigen Post schon aufgezeigt (meine
Implementierung für die RS232).
IAVRootloader, ist der eigentliche Bootloader Code. Dieser greift auf
das übergebene IApplication Interface zu um zb. Parameter, Einstellungen
und Ausgaben im eigenen GUI zu machen. Desweiteren fragt er das
Kommunikations-Interface = ICOM Objekt bei IApplication ab und benutzt
dieses um mit der eigentlichen Kommunikationshardware zu reden.
IDevice, ist ein Sub-Interface von IAVRootloader und nur eine
Strukturierung der vielen Methoden des Bootloader Interfaces. IDevice
stellt quasi gruppiert alle Informationen zum verbundenen AVR dar.
Schau dir also mal meine Beispiel-Anwednung par Postings weiter oben an.
Dann beginnst du deine eigenes ICOM Objekt zu bauen und gibts es statt
dem Aufruf OpenCOM() als Resultat in deiner IApplication Schnittstelle
bei der Methode .OpenCommunication() zurück.
Gruß Hagen
Hallo Hagen !
Der Hauptvorteil soll eigentlich darin liegen das ich keine virtuellen
Com-Ports mehr benutzen muß, sondern die angeschlossenen AVR's über ihre
ID identifizieren und direkt ansteuern kann. Bei den virtuellen
Com-Ports ist oftmals das Problem, das sich die Portnummer ändern und du
nacher 10 reservierte Com-Ports im System hast und außerdem nicht mehr
weißt unter welchem Comport der AVR jetzt zu erreichen ist !
Ich werde mich jetzt mal nen bißchen mit der ICom auseinandersetzen !
Danke und Gruß
Stefan
implementiert.
Ist das so richtig ?
Was bedeutet 'const ProcName: WideString ' ? bzw was muß ich hier
übergeben ?
Außerdem bekomme ich bei
FWCRC: TCRCDef;
FRCRC: TCRCDef;
eine Fehlermeldung über nicht definierte Variablen !
Gruß Stefan
> ist das so richtig ?
Ja.
> Was bedeutet 'const ProcName: WideString ' ?> bzw was muß ich hier übergeben ?
Musst du nicht benutzen, ist nur für eine gezieltere Fehlerbehandlung
nötig.
Zb. hat die ICOM Schnittstelle die Methode:
ReadByte(CRCFlags, ProcName);
und wird in verschiedenen higher-Level Funktionen des IAVRootloader
Interfaces benutzt. Zb. so
Res := FCOM.ReadByte([], 'Cmd.ReadEeprom.ReadByte(3) ');
19
except
20
on E: ECOMReadError do Res := Buf[0]
21
else raise;
22
end;
Falls also TCOM.ReadByte() einen Fehler meldet, Timeout oder so wird
.ReadByte() eine Exception auslösen und in dieser wird der Wert in
ProcName als Message mit eingebaut. Sowas geht mit anderen Sprachen wie
.NET und C# schon automatisch, allerdings erzeugen die auch einen
trace-baren Aufrufstack und mit Delphi erzeugt man optimierten Nativcode
der durch die Registeroptimierung der Parameter oft ohne Stack auskommt.
Ergo denke ich pragmatisch und baue so einen Paramater ein, im Hobby
kann man ja so vorgehen.
> Außerdem bekomme ich bei FWCRC: TCRCDef; FRCRC: TCRCDef;> eine Fehlermeldung über nicht definierte Variablen !
Ähm, du hast ja nicht meinen vollständigen Source und damit auch nicht
meine Unit CRC.pas.
Das Beste wird es sein du schickst mir einen PN oder lädst dir von hier
http://www.michael-puff.de/Developer/Delphi/Importe/Hagen_Reddmann/ mein
Delphi Encryption Compendium. In diesem enthalten ist meine CRC.pas
Unit, kannste sowieso immer gebrauchen da sie alle Cyclic Redundance
Checksum unterstützt.
Gruß Hagen
Nochwas, wir betrachten mal
FCOM.WriteWord($0500 + Pages, [crcReset, crcSend], '');
Das sendet das Kommando zum EEPROM schreiben. Die CRCFlags bedeuten nun
folgendes:
1.) crcReset, setzt die FWCRC: TCRCDef Struktur zurück, also resetet die
Schreib CRC auf $0000. Und das bevor die CRC über die Bytes $05 $00
gesendet werden.
2.) nun wird das Byte $05 und ($00 + Pages) gesendet über COM und auch
darüber die FWCRC updated.
3.) crcSwend bedeutet das WriteWord() als letztes die berechnete CRC
über COM sendet
In Summasumarum werden also 4 Bytes gesendet
$05 = Kommando Write Eeprom
Pages = Anzahl zu schreibender Pages
CRC = CRC16
CRC
Die zu programmierenden Daten wurden schon vor diesem Kommando in den
SRAM Buffer im AVR geschrieben und ebenso die Anzahl der Bytes die in
diesem Buffer gültig sind. Ebenso die Addresse an die diese Daten
geschriben werden sollen.
Angenommen man hat vorher mit dem SetBuffer() Kommando also die
Datenbytes $FF $FF $FF $FF gesendet und möchte nun aber mit dem
WriteEeprom Kommando ($05) aber 512 Bytes im Eeprom schreiben dann würde
man einfach das Kommando
$05 $80 crc crc
absetzen.
Die Sequenz um ab Addresse $012345 512 Bytes mit $FF im Eeprom zu
befüllen sähe also so aus
1.) SetAddr() -> $FF $01 $23 $45 crc crc
2.) SetBuffer() -> $FE $00 $00 $04 crc crc $FF $FF $FF $FF crc crc
3.) WriteEeprom() -> $05 $80 crc crc
Jedesmal wenn die CRC gesendet wurde wird sie neu initialisiert.
SetAddr() benutzt 24 Bit lineare Addressen, egal ob SRAM/EEPROM/FLASH
gelesen/geschrieben wird.
Das erste Byte ist immer das Kommando. Verschiedene Kommandos bestehen
aus 2 oder 4 Bytes + 2 Bytes CRC danach. Also auch die Kommandos sind
mit CRC separat abgesichert. Je nach Kommando werden danach entweder
weitere Daten gesenedet oder empfangen oder das Kommando ist schon
fertig, arbeitet also ohne Daten. Falls Daten gesendet oder empfangen
werden so sind diese ebenfalls mit der 16 Bit CRC abgesichert.
Tjo, soweit zum grundsätzlichen Aufbau der Kommando/Daten des
Protokolles.
Übrigens alles ist Big-Endian !!
WriteWord($FF00) sendet also $FF $00
WriteLong($01020304) sendet $01 $02 $03 $04
Gruß Hagen
Es wird schnell ersichtlich das man mit der obigen Methode den
Kommunikationsaufwand reduzieren kann. Ich hatte mal eine Testversion
meiner PC-Bootloader-Software geschrieben die die zu programmierenden
Daten für den FLASH und EEPROM nach sich wiederholenden Sequenzen
analysierte und dann mit der obigen Methode quasi eine Komprimierung
durchführte. Solange man viele solcher Sequenzen hat konnte man 25-50%
an Kommunikation damit einsparen. Leider zeigte aber die Realität, also
normale Programme für AVRs, das man dieses Ratio eben nicht erreichen
kann. Also habe ich in der aktuellen Version der PC-Software darauf
verzichtet und benutze diese Feature nur mein zb. Löschen des EEPROMs.
Die ansosten einzige Optimierung in dieser Richtung ist beim Schreiben
des FLASHs. Sollten dort komplette Pages im HEX auftauchen die alle mit
$FF gefüllt sind so werden diese nur durch ein EraseFlash() Kommando
programmiert. Auch dieses Kommando -> $02 Pages crc crc, kann mehrere
Pages am Stück löschen.
Gruß Hagen
Hallo Hagen,
habe ein Problem mit dem AVRootloader,
ruft man das Prg. per Komandozeile auf funktioniert es nicht
wenn im Pfad ein Leerzeichen ist (oder bin ich zu dumm ? )
z.B. -Dc:\programme\avr tools\ -Ftest.hex ergibt
c:\programme\avr\test.hex
koenntest du das bitte pruefen & event. beheben ? vielen Dank !!!
vlg
Charly
@Charly:
Uff, das ist so ein Feature von Delphis RTL das ich schon seit langem
hasse. Es kann solche Parameter nicht korrekt auswerten, Leerzeichen
stellen einen Separator zwischen mehreren Parametern dar.
Das müsste ich definitiv im Source ändern, wird aber dann heissen das
ich die Kommandozeile aufwendig von Hand parsen müsste, statt eben auf
fertige Funktionen der RTL zurück zu greifen.
Vorerst musst du den Ordner umbenennen zb. in avr_tools, also mit
Unterstrich statt Leerzeichen.
Mal sehen, es könnte demnächst sowieso eine Version 3.0 kommen.
Gruß Hagen
Mal ne kleine Umfrage meinerseits.
Was für Erweiterungen und Verbesserungen schweben euch noch vor ?
- Versionsverwaltung der geflashten Software
- Updates überprüfen diese Versionsnummer
- diese Versionsnummer wird nur bei Verschlüsselung überprüft, also
durch den AVR selber mit verschlüsselten Daten. Manipulationen sind
ausgeschlossen. Dieses Feature würde nur vorhanden sein bei aktvierter
Verschlüsselung. Nur dort macht es auch kryptographisch einen Sinn,
alles andere wäre nur informativ. Das bedeutet das im vorgefertigten und
verschlüsselten ACY File die Versionsnummer der verschlüsselten HEX
Datei gespeichert wird. Im ACY File steht das alles geschützt drinnen.
Diese Daten werden beim Kunden zum AVR gesendet und dieser überprüft die
aktuell installierte Version mit der gerade empfangen Versionsnummer.
Nur wenn es eine neuere Version ist wird eine Programmierung des FLASHs
zugelassen. Die Versionsnummer könnte in den letzten Zellen im
Anwendungs-FLASH gespeichert werden, quasi so wie der Einsprungsvektor
bei den kleinen AVRs. Es würden also zb. 4 Bytes vom Anwendungs-FLASH
weniger zur Verfügung stehen.
- Bug beseitigen mit der BootMsg: im Zusammenhang mit der
Verschlüsselung
- Bug beseitigen mit der Kommandozeile
- Autodetektion des COM Ports bzw. Serielle Schnittstellen
- separate Bootloader-EXE die nur vorgefertigte ACY Dateien
programmieren kann, quasi die jetzige Bootloader Software in
abgespeckter Version. Dafür enthält diese EXE, quasi wie ein
selbstextrahierendes ZIP, schon die ACY Datei.
- Auswahlbox für das BootSign: in die PC-Software integrieren. Welchen
Sinn hat das ? Nun, wenn man den Bootloader auf 1-Wire benutzt dann kann
man jetzt schon mehrere AVRs am gleichen 1-Wire-Bus auf einer Platine
verdrahten. Werden diese mit dem Bootloader programmiert, benutzen aber
alle eine andere BootSign: dann kann man mit der PC-Software über einen
Draht alle AVRs programmieren. Man könnte also zb. 10 baugleiche AVRs
auf einer Platine per 1-Wire-Bus verbinden. Alle benötigen im Grunde die
gleiche Anwendungssoftware. Man muß also nur 10 Versionen von
AVRootloader.ASM komplieren mit jeweils anderen BootSign: zB. BOOT00 bis
BOOT09. Dann programmiert man diese 10 unterschiedlichen Bootloader in
diese AVRs. Danach kann man sie alle über die PC-Software programmieren.
Entweder indem man diese 10 BootSign in einer Auswahlbox von Hand
auswählt und dann jeden AVR einzeln programmiert oder aber die
PC-Software geht automatisch alle Einträge in dieser Auswahlbox durch
und versucht alle mit der gleichen Software zu programmieren.
- bitte keinen Vorschlag wie "Terminal" integrieren ;)
Gruß Hagen
@Henry:
>"" ?>-D"c:\programme\avr tools\"
Nee geht nicht, habs sicherheisthalber probiert. Um eine Änderung im
Source, wie oben beschrieben käme ich also nicht rum. Nur kann ich dann
ja gleich alles richtig machen, statt mit Tricks zu arbeiten. Ist halt
schade das das es die Delphi RTL nicht gleich richtig macht.
Gruß Hagen
Hallo Hagen !
Hab mir deine CRC.pas runtergeladen und integriert.
Implementieren muß ich hier aber nichts weiter, da die Funktionen
bereits in der ICom implementiert sind, oder ?!?
Außerdem hab ich noch ein paar Fragen:
Die d2xx.dll besitzt keine Flush funktion, dafür aber Purge_Buffer_In
und Purge_Buffer_Out. Welche muß ich hier verwenden und wie kann ich die
Flush Funktion Implementieren.
Außerdem ist keine Echo Funktionalität vorgesehen. Wird diese zwingend
benötigt ?
Und zu guter Letzt noch die drei Proceduren ReadCrc,WriteCRC und
ResetCRC.
Hier stehe ich momentan leider komplett auf dem schlauch was die
Implementierung angeht.
Zur Version 3.0:
Die Idee mit der Versionsnummer finde ich super !
- Autodetektion des COM Ports bzw. Serielle Schnittstellen
Wie stellst du dir das vor ? Einfach das alle Ports die im System
vorhanden sind und genutzt werden im Programm aufgelistet werden(hab ich
bei mir schon implementiert), oder willst du ne erkennung einbauen an
welchem ComPort der AVR hängt ?
Ansonsten weiterso und nochmal Danke für deine wirklich ausführliche
Hilfe!
Gruß Stefan
Die .Flush() Funktion sollte beide Buffer vollständig senden oder
empfangen, nicht Purgen.
1
procedure TCOM.Flush;
2
begin
3
if FHandle <> 0 then
4
FlushFileBuffers(FHandle);
5
end;
versuche es mal mit einer Leermethode also ohne Implementierung.
> Außerdem ist keine Echo Funktionalität vorgesehen. Wird diese zwingend> benötigt ?
Würde ich einbauen, da nicht sooo schwierig. Alle Methoden die mit
.Read??? und .Write??? beginnen landen intern immer bei .ReadData() und
.WriteData()
Also nur in diesen beiden Methoden findet die komplexere Komunikation,
CRC Berechnung und auch der EchoMode statt.
Bei .EchoMode=TRUE musst du also in .WriteData() nur exakt die Bytes
wieder sofort einlesen die du gesendet hast und verwerfen, überprüfen
mit den gesendeten Bytes.
> ... ReadCrc,WriteCRC und ResetCRC.
Ganz einfach:
1
procedure TCOM.WriteCRC;
2
var
3
CRC: Word;
4
begin
5
CRC := CRCDone(FWCRC);
6
InternalWriteData(@CRC, SizeOf(CRC)); // WriteData() ohne CRC berechnung
7
CRCDone(FWCRC);
8
end;
9
10
procedure TCOM.ResetCRC;
11
begin
12
CRCDone(FWCRC);
13
CRCDone(FRCRC);
14
end;
15
16
function TCOM.ReadCRC(const ProcName: WideString): Bool;
17
begin
18
ReadWord([], ProcName);
19
Result := CRCDone(FRCRC) = 0;
20
end;
>..Autodetektion des COM Ports bzw. Serielle Schnittstellen>Wie stellst du dir das vor ?
1.) alle COM Ports im System ermitteln, samt FriendlyName, also sowas
"COM4: Bluetooth serieller Kommunikationsanschluß"
2.) COM Port ComboBox wird umgebaut zu einer reinen DropDown Liste. Also
keine manuelle Eingabe eines COM Ports merh möglich. Zusätzlich wird es
in dieser Liste einen Eintrag wie "AUTO" geben. Ist dieser ausgewählt so
versucht die Software bei einem Connect() alle in der Liste vorkommenden
Ports anzusprechen und mit einem evntl. angeschlossen AVR zu
kommunizieren. Das geht natürlich nur dann wenn der AVR aus der
Anwendungssoftware in den Bootloader gesprungen ist. Dazu gibt es
mehrere Möglichkeiten:
a) man überwacht per PinChange den Bootloader-RX/1-Wire-Pin und springt
dann aus der PinChange-ISR direkt in den RESET Vektor zum Bootloader
oder benutzt den WatchDog um einen RESET auszulösen. Oder man benutzt
den RTS Pin der RS232, konfiguriert in der .INI Datei das Verhalten der
RTS Leitung entsprechend und verbindet die RTS Leitung mit RESET am
Board oder legt sie an einen extra Pin am AVR der wiederum mit
PinChange-ISR überwacht wird.
Wichtig bei dieser Auto-Detektion des Ports ist es also das der AVR in
den Bootloader springt auf Verlangen der PC-Software. Ansonsten muß man
permanter den RESET-Taster.
Gruß Hagen
@JoJo:
Warum dann aber nicht auf den Wert in BootSign: in der Applikation
reagieren ?
Die PC-Software sendet bei einem Connect() wiederholt den Wert
0x00,0x00,0x00,0x00, "BOOT"
bzw. das was in BootSign: drinnen steht, bis
a) der Bootloader reagert mit einer Rückmeldung
b) der Connect() Versuch in der PC-Software manuell beendet wird
c) eine gewisse Anzahl von Connect() Versuchen abgelaufen ist (* neue
Version wird das so machen müssen wenn sie ein AUTO Connect()
durchführt)
Desweiteren muß klar sein das die Baudrate stimmen muß. Die eigene
Anwendung hängt also am UART und erwartet eine Kommunikation mit der
richtigen Baudrate, ganz im Gegensatz mit dem Bootloader der eine
Baudrate-Detektion besitzt.
Ich denke also das dein angedachtes Feature schon jetzt mit dem
Bootloader geht, du musst nur richtig konfigurieren ;)
Der Connect() ist ein zeimlich Timining kritischer Prozess, sowohl im
AVR wie auch auf PC Seite.
gruß Hagen
Hallo Hagen,
das habe ich auch gedacht und schon probiert.
Gescheitert bin ich aber daran dem AVRootloader
im Sign=BOOT den Code für <LF> einzufügen.
In meinem Fall ist der Befehl zum Einsprung in den Bootloader
auch etwas länger als 4 Zeichen z.B.: ":System:Firmware:Update".
Dadurch würde dann der Bootloader unnötig aufgebläht.
Ich habe mir bisher mit einer Batchdatei geholfen.
Das klappt aber je nach Rechner und Auslastung mehr schlecht als recht.
Zuverlässiger ist dann zuerst den AVRootloader zu starten,
aber nicht "Connecten" und dann den Batch zu starten.
Das ganze ist auch als Wunsch für die neue Version zu verstehen.
Ich bin mit dem Loader bisher auch prima klargekommen.
Danke für Deine Arbeit.
JoJo
@Jojo,
Du möchtest also in der PC-Software das sie bei einem Connect folgendes
macht
1.) einen konfigurierbaren String über RS232 senden
2.) eine kurze Zeit warten
3.) mit der bisherigen Vorgehensweise weitermacht
Hm, könnte ich so ändern wenn du dich bereit erklärst diese neue Version
speziell auf dieses Feature hin zeitnah zu testen ;-)
Gruß Hagen
Genau.
Ob die Wartezeit zwischen 1) und 3) notwendig ist kann ich zur Zeit
nicht beurteilen.
Da dieses Feature nicht jeder braucht sehe ich auch kein Problem darin,
das in der "Ini"- Datei zu "verstecken". Ist ein Eintrag vorhanden dann
wird dieser String einmalig gesendet. Wenn nicht dann nicht.
Ob und wie man in diesen String Steuerzeichen (Escape-Sequenzen, CR, LF
etc.) mit einbauen kann ist mir noch nicht ganz klar.
Zum Testen: Kein Problem wenn mich nicht gerade der Grippevirus
erwischt.
Gruß JoJo
>Ob und wie man in diesen String Steuerzeichen (Escape-Sequenzen, CR, LF>etc.) mit einbauen kann ist mir noch nicht ganz klar.
Kommt eh, auch für die BootSigns als ESCaped Sequence. Etwa so
Test/0a/0dString//
eräbe dann
test
<lf><cr>
String
/
> das in der "Ini"- Datei zu "verstecken"
nur so geplant.
Gruß hagen
@JoJo: hier zum Testen ;)
@Andere:
neuste Version 3.0, was hat sich geändert ?
- Versionsverwaltung für eure eigene Software in AVRootloader.ASM
eingebaut. Die Versionsnummer ist 4 Bytes groß und wird in den letzten 4
Bytes im Anwendungsflash gespeichert. Bei AVRs mit Bootsektion exakt die
4 Bytes vor BootStart, also letzten 4 Bytes des nutzbaren FLASHs für
eure Anwendung. Bei AVRs ohne Bootsektion steht in den letzten 2 Bytes
der JMP zu Main. Deshalb steht die Version in den 4 Bytes davor. Ihr
könnt also in eurer Software per LPM auf diese Versionsnummer zugreifen.
Der Bootloader sendet diese Versionsnumer beim Connect zur PC-Software.
Diese stellt die Versionsnummer im "Device Information" Fenster dar. In
AVRootloader.ASM könnt ihr per UseVersioning=1 die Versionsverwaltung
aktivieren. Wird die Verschlüsselung als Updatemöglichkeit benutzt kann
bei einem Update eurer AVRs mit einem kompiliertem ACY File eine
Versionsnummernprüfung erfolgen. Dabei vergleicht der Bootloader im AVR
die im ACY verschlüsselt gespeicherte neue Versionsnummer mit der
aktuell installierten Versionsnummer. Ist die neue kleiner als die alte
wird ein Fehler zurückgemeldet und der AVR kann nicht programmiert
werden. In der PC-Software sind 4 Eingabefelder in denen ihr eure
Versionsnummer eingeben könnt die bei der Kompilation einer ACY Datei
benutzt werden soll. Über die "Verify Mask" könnt ihr bestimmen welche
Teile der Versionsnummer im AVR überprüft werden sollen. Somit könnt
ihr ein "Back-Update" des AVRs durchführen indem ihr einfach eine ACY
Datei kompiliert und alle 4 Checkboxen abhackt. Diese Versionsverwaltung
ist kryptographisch sicher, also nur ihr als Besitzer des Paßwortes
bestimmt das Verhalten der Versionsverwaltung. Alle Daten sind
verschlüsselt, sowohl in der erzeugten ACY Datei wie auch bei der
Datenübertragung zum AVR. Nur der Bootloader im AVR entschlüsselt und
vergleicht diese Versionsnummern. Diese geschützte Versionsverwaltung
funktioniert beim Schreiben des FLASHs wie auch EEPROMs. Dafür muß aber
die zwingende Verschlüsselung des FLASHs und EEPROMs in AVRootloader.ASM
aktiviert sein.
- Autodetektion der COM Ports auf dem PC. Dabei werden die installierten
und verfügbaren COM Ports im System ermittelt und mit ihren FriendlyName
angezeigt.
- Autodetektion des COM Ports an dem der Bootloader angeschlossen ist.
In der COM Port Auswahlliste einfach "AUTO" auswählen. Diese könnt ihr
auch in der Kommandozeile nutzen. Ist AUTO gewählt und es wird eine
Verbindung aufgebaut dann versucht die PC-Software jeden COM Port in der
Auswahlliste. Die Anzahl der Trials bei diesem Versuch pro COM Port kann
in der AVRootloader.INI -> [System] -> ConnectTrials=? eingestellt
werden. Damit dies aber funktioniert muß euer Gerät autom. in den
Bootloader wechseln können. Es gibt mehrere Wege, zb. PinChange ISR am
RX Pin des Bootloader, oder RTS-Leitung der RS232 am RESET des AVRs und
RTSPulse/RTSInterval in AVRBootloader.ini entsprechend konfiguriert.
- Neu ist die Möglichkeit das die PC-Software bei der Verbindung einen
definierbaren String sendet. Eure Anwendung im AVR, die selber die UART
benutzt, kann diesen Befehl dann benutzen um in den Bootloader zu
springen. Dazu konfiguriert ihr in AVRootloader.INI -> [System] ->
AppCmd= . Der Wert in AppCmd kann Sonderzeichen enthalten zb. so
AppCmd=RunBoot/0ATest//
Ein Backslash mit anschließend einem HEXadecimalen Wert, immer zwei
Zeichen lang. Ein Doppelslash hebt den ESCapecode auf.
VORSICHT! ihr könnt nicht das Zeichen #13 -> /0D benutzen, leider. Das
liegt daran das die Baudrate Detection im Bootloader dieses
Sonderzeichen auswertet. Wollt ihr es denoch benutzen so müsst ihr den
Bootloader ohne "Baudrate Detection" konfigurieren, also mit fest
eingestellter Baudrate (was meistens dann auch Sinn macht).
- Auswahlbox für das BootSign in PC-Software eingebaut. Man kann, wenn
man 1-Wire Kommunikation benutzt, alle AVRs eines Gerätes am gleichen
1-Wire-Pin verdrahten. Alle AVRs, können unterschiedliche Typen sein,
benutzen den AVRootloader. Nun kann man mit der PC-Software all diese
AVRs updaten.
- Fehler beim Auswerten der Kommandozeile beseitigt, Leerzeichen im Pfad
wurde als Separator erkannt.
- Fehler bei der BootMsg beseitigt. Die BootMsg wurde in AVRotloader.asm
verschoben und kann nun auch mit der Verschlüsselung benutzt werden.
- Der Wert im Eingabefeld "ACY Info" in der PC-Software wird beim
Kompilieren einer ACY Datei in diese lesbar gespeichert. Neben diesem
Wert auch die lesbare Versionsnummer. Mit einem einfachen Texteditor
kann man diese Infos aus einer ACY Datei auslesen.
- Kompatibilität zum Bootloader Version 1 und 2 sollte gewährleistet
sein.
- einige kleinere Darstellungsfehler beseitigt
- alle Dateien wie AVRootloader.dev und AVRootloader.ASM wurden auf die
neusten AVRs aktualisiert (AVR Studio 4.15 Build 623)
- neuer Parameter -SBOOT für die Kommandozeile eingebaut, damit kann man
das BootSign für den Bootloader-Connect vorgeben
- für diejenigen die die AVRootloader.DLL benutzen. Diese ist nicht
kompatibel zur alten Version !
Testen konnte ich das Ganze zZ. nur auf einem ATmega162, also mit einem
AVR mit Bootsektion. Es wäre lieb wenn einer, der zZ. mit einem ATTiny
den Bootloader benutzt, die neuste Version testet. Speziell BootMsg,
UseVersioning mit/ohne Verschlüsselung, danke.
Gruß Hagen
Hallo Hagen,
das ging ja fix.
Hier mein vorläufiges Ergebnis: ES KLAPPT, aber...
- Anzeige der verfügbaren Schnittstellen: Com2 erscheint 4mal (siehe
Bild)
- Beschreibung für AppCmd in Bootloader.txt: Backslash soll Slash heißen
- AppCmd wird jetzt immer vor Bootsign gesendet.
Ich bin von einmalig AppCmd und anschließend "unendlich oft" BootSign
ausgeganngen. So stört es aber auch nicht.
(Evtl. währe ein Parameter wie bei RTSInterval möglich - muss nicht)
Mein Wunsch ist damit zur vollsten Zufriedenheit erfüllt.
Besten Dank für Deine Arbeit.
JoJo
@JoJo:
> Anzeige der verfügbaren Schnittstellen: Com2 erscheint 4mal
Echt blödes Betriebssystem. Tja was kann ich tun, ich weiß es nicht !
Denn es scheint keine Methode zu geben die gerade im System aktiven
Schnittstellen mit ihrem FriendlyName abfragen zu können. Ich habe nun
mittlerweile 4 verschiebene Vorgehensweisen zur Ermittlung der aktiven
COM Ports implementiert und getestet (alle aus dem WEB, zb. MSDN) Keine
hat davon richtig funktioniert, also habe ich mir selber eine
zusammengestrickt. Ich gehe nur über die Registry. Das Problem ist nun,
ich kann zwar ermitteln welche COM Ports im System aktiv sind, aber ich
kann deren eindeutigen FriendlyName nicht ermitteln. So wie bei dir,
kann es vorkommen das über einen längeren Zeitraum verschiedene
Installationen erfolgten. Oder das zb. ein USB-Seriell-Wandler an
verschienden USB-Hubs angeschlossen wurde. Jedesmal kann dann der
gleiche COM Port für ein anderes Gerät benutzt werden. Diese Infos
stecken in der Registry und ich lese sie aus. Dummerweise weiß ich zwar
das es einen aktiven COM2 im System gibt (auch aus der Regustry) kann
aber die möglichen installierten Treiber/Geräte aber nur über den
Portnamen zuordnen. Installierte Treiber können es aber eben mehrere zu
einem Port sein, welcher davon aktiv ist kann man nicht aus der Registry
auslesen, bzw. ich habe keinen Trick im WEB dafür gefunden.
Ich bin kurz davor alles wieder umzubauen auf mein altes GUI, dh.
FriendlyName wieder aus der Anzeige raus zu nehmen. Denn was nützt es
wenn man den COM2 zb. dreimal sieht, mit drei unterschiedlichen
FriendlyNames, und damit dann doch wieder keinerlei sinnvolle
Information mehr hat welches Gerät nun real angeschlossen ist.
> AppCmd wird jetzt immer vor Bootsign gesendet.
Ja, ich dachte mir das dies der beste Kompromiß ist. Denn es könnte ja
sein das die Applikation selber nicht beim ersten Senden von AppCmd
richtig reagiert. Für meinen Bootloader im AVR ist dieses AppCmd egal,
solange AppCmd kein #13 enthält und nichts mit BootSign überreinstimt !!
Ich habe diese Änderung ja nur für dich, als bisher einzigen Nutzer,
eingebaut.
Gruß Hagen
Mir würde es schon reichen wenn nur die vorhandenen Schnittstellen in
der Liste auftauchen. In meinem Fall also Com1 bis Com4, egal wie die
sonst noch genannt werden. Hauptsache in der Liste sind keine ComPorts
vorhanden, die nicht im System vorhanden sind.
Viele Programme zählen einfach Com1..Com255 in der Liste auf. Ist ja
auch am einfachsten.
Ich habe übrigens mit einem Mega168 getestet.
JoJo
Ich habe den Friendlyname der COM Ports wieder rausgenommen.
Es gibt keine Methode die Liste der aktiven COM Ports (aus der Registry)
mit der Liste der möglichen COM Ports + FriendlyName zu synchronisieren.
Auf meinen Rechnern ist die Registry und Installationen sauber, deshalb
tratt dieses Problem so nicht auf.
Zusätzlich habe ich einen weiteren Parameter für die Kommandozeile
eingebaut, Parameter -V. Dieser setzt die Daten für die
Versionsverwaltung. Das könnte so aussehen
-V0102F01A0F
Daraus wird Version 1.2.240.26 und alle Verify Checkboxen angehackt. Der
letzte 2 Zeichen HEXadezimal Wert im Parameter gibt die Bitkodierung
dieser Checkboxen vor.
Gruß Hagen
Hallo Hagen !
Für die Comports hab ich dir ne Routine, funktioniert bei mir
einwandfrei !
Nur die Friendlynames sind nicht eingebaut, aber das ist für dich sicher
nen klax !
1
function StrX(const Trenner:Char; s:string; x:integer):string; //Sucht X-ten String in s
2
var sl:TStringList;
3
begin sl:=TStringList.Create;// Die Liste nimmt die einzelnen Strings auf
4
// siehe Online.Hilfe ExtractStrings (so kommen die Strings in sl
5
// -1 weil jede sl mit 0 beginnt
6
if ExtractStrings([Trenner],[' '],PChar(s),sl)>= x-1 then
7
// z.B. Leerzeichen am Anf.ignorieren Quelle Liste
if (not Success) and (GetLastError = ERROR_INSUFFICIENT_BUFFER) then
46
begin
47
GetMem(PortsPtr, BytesNeeded);
48
try
49
Success := EnumPorts(
50
nil,
51
1,
52
PortsPtr,
53
BytesNeeded,
54
BytesNeeded,
55
Returned);
56
57
for I := 0 to Returned - 1 do
58
begin
59
InfoPtr := PPortInfo1(DWORD(PortsPtr) + I * SizeOf(TPortInfo1));
60
TempStr := InfoPtr^.pName;
61
if Copy(TempStr, 1, 3) = 'COM' then //begin //Hier ist der Filter angegeben, der nur ComPorts ausgibt
62
if ComDa((StrX(#58,TempStr,1))) = true then
63
ComboBox1.Items.Add(StrX(#58,TempStr,1)); //Strings in einer TComboBox hinzufügen
64
// end;
65
end;
66
finally
67
FreeMem(PortsPtr);
68
end;
69
end;
70
if not Success then MessageBox(Handle, 'Die COM-Port-Liste konnte nicht erstellt werden.', PChar(Application.Title), MB_OK or MB_ICONWARNING);
71
end;
Vielleicht klappt es ja damit ! Hab ich auch irgendwo aus dem internet !
Ansonst mal wieder respekt wie schnell du sowas umsetzt !
Coole Sache !
Gruß Stefan
Hello Hagen,
I am sorry but I do not speak German language. For a few days (weeks) I
am looking for suitable AVR bootloader with TEA (XTEA) encryption. Your
bootloader is realy the best I have seen till now. I have tried it for a
few hours on ATMEGA128. Transfers to flash with or without encryption
worked well on uprocessor in STK500 behaind HW COM. In my application I
use Lantronix XPORT, on PC I have installed virtual COM. Where is my
problem: When I transfer file without encryption, LAN connectivity
switches on and file is transfered well. Everything is all right. But
when I try to transfer encrypted file, bootloader is connected, LAN is
connected too, but LAN activity is not blinking and bootloader is
"working". Have you ever tried this kind of transfer? What can be wrong?
Thank you for your shareing of code, it had to take much time and much
work.
Best regards
Petr
Hi Petr,
i know less about you special hardware setup, it is very uncommon to me.
To get more information i need some error protocol output from my
bootloader software. Normaly the connection process is always the same,
even if cryptography is used. I do not see any point why it should
differently work with and without cryptography. The only suggestion, or
even my opinion, where that the XPORT LAN-protocol, to transfer the
virtual COM port data, must be wrong or probable the timing is quit
different. Try to increment the values in AVRootloader.ini in section
[Timeouts], especialy value for Base. But iff you get no
correspondending error messages, eg. timout errors in my bootloader
software this suggestion would by pretty useless.
Best regards, Hagen
Hi Hagen,
if AVRootloader is in state "working" it is impossible close the window
of loader. I was waiting for long time and after it I obtained protocol
I enlose:
20.01.09-07:19:38-441 > Connecting on port COM4...
20.01.09-07:19:38-551 > Switch to 2-Wire mode
20.01.09-07:19:38-671 > Device connected
20.01.09-07:19:41-976 > Program...
20.01.09-07:19:41-976 > execute compiled data
20.01.09-07:19:41-976 >
$70,$06,$C8,$F7,$06,$AD,$AE,$04,$EE,$83,$3D,$81,$50,$3F,$31,$DC 1.0.0.1
20.01.09-07:19:41-976 > selected options in compiled file:
20.01.09-07:19:41-976 > - programming FLASH
20.01.09-07:19:41-976 > - FLASH data are encrypted
20.01.09-07:26:07-020 > Cmd.SetBuffer.ReadByte() ICOM: read error.
During state "working" I can not see any activity on the line. I will
try to catch start of the communication to the terminal and after it I
will be back here. Increasing of timeout has no influence to the result.
Regards
Petr
Hallo Hagen !
Hab auch nochmal nen bißchen gesucht und hab diese Seite gefunden:
http://www.delphipraxis.net/topic140097,0.html
(COM Ports im System auslesen)
Die benutzt zwar die Jedi winApi.dll, dafür scheint aber alles zu
funktionieren ! zeigt bei mir nur verbundene, vorhandene Com-Ports incl.
FriendlyName an !
Gruß Stefan
@Stefan,
danke dir, kannte ich aber schon und habe alle Methoden probiert. Der
Weg übers SetupAPI funktioniert leider nicht richtig. Also das was es
anzeigt ist zwar richtig (aktive Ports und FriendlyName) aber es zeigt
nicht alle aktiven Ports im System an. Zb. mit Bluetooth und USB Wandler
soll es ein Problem haben. Kann man irgendwo bei MSDN nachlesen.
Meine obige gepostete Methode funktioniert sehr gut, solange man keine
Friendlynames benötigt. Und mit der letzten Version benötige ich sie
auch nicht mehr, da dieses Feature raus ist.
Der Trick mit dem testweisen Öffenen des COM Ports ist absolut nicht das
was ich möchte. Es kann durchaus sein das ein COM Ports durch eine
andere Anwendung geöffnet ist und diesen Port möchte ich denoch in der
Liste anzeigen.
Grundsätzlich sehe ich es im Hobby nicht ein den "Mist" den andere
Entwickler verzapft haben ausbessern zu wollen. Dazu ist mir, und vielen
anderen Benutzern des Bootloaders, dieses Feature einfach zu unwichtig.
Wenn man sich mal den Aufwand, nur par COM Ports im System zu ermitteln,
anschaut dann ist dieser nicht gerecht fertigt. Ein vorausschauender
Systementwickler berücksichtig im Besonderen die Useablity dessen was er
erschafft für die darauf aufsetzenden Entwickler. So entsteht ein gutes
OS und kein MS-Windows. Es ist Aufgabe vom OS solche Daten sauber und
möglichst einfach abfragbar zur Verfügung zu stellen. Wenn aber für
diese Abfrage ein 250-Zeiler benötigt wird dann stimmt da was am Konzept
und Umsetzung des OS nicht. Nun, und ich werde mich nicht hinsetzen,
viel Zeit verschwenden, um diese Schwachstelle auszubügeln.
Ergo: AVRootloader zeigt keine Friendlynames an, fertig, Thema
abgegessen ;)
Sorry musste aber mal Luft raus lassen.
Gruß Hagen
@Hagen
Vielen Dank für dieses Update. Super!
Ich hätte aber noch eine Anregung an das Optische. Ist zwar nicht so
wichtig aber durchaus nützlich. Und zwar eine Fortschrittsanzeige.
Natürlich wenn der Aufwand dafür nich zu groß ist.
Hallo Hagen !
Ist doch kein Problem, wenn man die FriendlyNames nicht gescheit
einlesen kann ist das ja nun wirklich nicht dein Problem. Da hast du
absolut recht !
Für mich ist das Feature sowieso eher nebensächlich !
Ich kämpfe ja immernoch mit der TCom Implementation ! :-)
Du hast geschrieben das die neue AVRootloader.dll nicht mehr zur alten
kompatibel ist ! Betrifft das auch meine TCom Function oder hat das
ausschließlich mit der Versionsabfrage zu tun ?
Übrigens: Tolles Update !! Die Version 3.0 gefällt mir sehr gut !
Gruß Stefan
Hallo Hagen,
super Projekt! Ich würde Deinen Bootloader auch gerne einsetzen, aber da
muss ich wohl eine Änderung vornehmen und möchte im Vorfeld fragen, ob
Du das für machbar hältst:
Ich möchte den Bootloader per DMX-Schnittstelle nutzen, d.h. vor dem
UART des Controllers sitzt ein RS485 Pegelwandler (Standardteil). Rx und
Tx sind seperat angeschlossen, allerdings muss ich nun den Pegelwandler
von Empfangen auf Senden umstellen können. Reicht das in deinem Code an
ein/zwei Stellen die entsprechenden Ports zu setzen, oder wird das
Deiner Meinung nach ein größeres Unterfangen???
MfG, roeben
@Stefan:
>Du hast geschrieben das die neue AVRootloader.dll nicht mehr zur alten>kompatibel ist ! Betrifft das auch meine TCom Function oder hat das>ausschließlich mit der Versionsabfrage zu tun ?
Ja und Nein ;) Einfach die AVRootIntf.pas bei dir neu einbinden als
Header. Es betrifft das IApplication Interface (muß weitere Parameter
zurückliefern) und den TTimeout Record, enthält ebenfalls neue Felder.
Allerdings, schäm mich :( habe ich schon wieder par kleinere
Veränderungen am Bootloader gemacht. Diesen werde ich nach einer
gewissen Wartezeit hier ebenfalls veröffentlichen. Es nutzt ja nichts
das Forum wegen par unwichtigen Änderungen ständig voll zu müllen. Ich
warte also noch ab ob irgendwelche Fehler oder Verbesserungswünsche
eintrudeln und veröffentlich dann die neuste Version.
Essentiell gehts um das XPORT Problem vom Petr. Ich denke das der XPORT
mit großen Datenpacketen ein Problem hat. Also wurde mein AVRootloader
dahingehend geändert das man die maximale Packetgröße der
Datenübertragung konfigurieren kann.
@roeben:
>Ich möchte den Bootloader per DMX-Schnittstelle nutzen, d.h. vor dem>UART des Controllers sitzt ein RS485 Pegelwandler (Standardteil). Rx und>Tx sind seperat angeschlossen, allerdings muss ich nun den Pegelwandler>von Empfangen auf Senden umstellen können. Reicht das in deinem Code an>ein/zwei Stellen die entsprechenden Ports zu setzen, oder wird das>Deiner Meinung nach ein größeres Unterfangen???
Sollte sehr einfach gehen:
1.) vor der Baudrate Detektion, also gleich am Anfang auf Empfang
stellen
2.) bei putc: nach den rcall waitf auf Senden stellen
3.) bei getc: die erste schleife leicht abändern und auf Empfang
stellen. Hier sollte der rjmp getc auf eine neue Addresse nach deinem
Umstellen auf Empfang zeigen
etwa so:
1
putc: rcall waitf
2
rcall waitf
3
sbi RS485_PORT, PinRX_TX
4
ldi cnt, 10
5
com paral
1
getc: cbi RS485_PORT, PinRX_TX
2
get0: rx_1
3
rjmp get0
und am Anfang des Booloaders vor
1
cbi RS485_PORT, PinRX_TX
2
sbi RS485_DDR, PinRX_TX
3
4
.if UseAutobaud
5
; baudrate detection
6
abd: ldi cmdl, byte3(BootDelay / 6)
Das dürfte es gewesen sein. Ich bitte dich um zwei Dinge
1.) baue deine Änderungen, wenn sie so funktionieren sollten, per
DEFINES und bedingter Comilierung in den AVRootloader.ASM ein. Also wie
bei RX_PORT/TX_PORT/RX/TX zwei neue Defines. Die obigen Änderungen,
falls sie funktionieren dann per bedingte Compilerswitches einbauen. Und
finally UseRS485 als Compilerswitch.
2.) veröffentliche deine Änderungen, wenn sie denn funktionieren, bitte
hier im Forum oder maile sie mir, das ich sie übernehmen kann. So haben
alle was davon.
Gruß Hagen
@Hagen: Hab gerade die Test-Dll vom AVRootloder 3.0 getestet !
Leider bekomme ich mehrere Fehler:
[Fehler] Unit1.pas(43): E2003 Undefinierter Bezeichner: 'GetAppCmd'
[Fehler] Unit1.pas(43): E2003 Undefinierter Bezeichner: 'GetAppVersion'
[Fehler] Unit1.pas(43): E2003 Undefinierter Bezeichner: 'GetACYInfo'
[Fehler] Unit1.pas(43): E2211 Deklaration von 'OpenCommunication'
unterscheidet sich von der Deklaration in Interface 'IApplication'
Gruß Stefan
Datei AVRootIntf.pas mal anschauen, das sind die besagten Änderungen.
Das was ich dir per Mail geschickt habe ist alles auf diese neue Version
compiliert. Du musst also nur deine Sourcen updaten.
Gruß Hagen
@Stefan:
jetzt hab ichs kapiert ;) Du musst in deiner Application natürlich diese
neuen Methoden des Interfaces auch deklarieren und implementieren. Dh.
in deinem TForm hast du als Schnittstelle IApplication angegeben, hast
aber diese neuen Methoden nicht im TForm deklariert. Der Compiler
meckert es also an. Die function OpenCommunication(Index: Integer):
ICOM; stdcall; hats einen neuen Parameter Index um die Autodetektion des
COM Ports zu realisieren. Index beginnt dabei immer bei 1 und zählt
hoch, so lange bis der IAVRootloader eine Verbindung herstellen konnnte
oder aber die Methode .OpenCommunication() den Rückgabewert auf nil
setzt, eg. Result := nil;
Meine .OpenCommunication sieht also so aus:
1
function TMainForm.OpenCommunication(Index: Integer): ICOM;
2
var
3
PortName: String;
4
begin
5
Result := nil;
6
if AnsiCompareText(Port, 'AUTO') = 0 then
7
begin // Auto Detection
8
if Index >= CBPort.Items.Count then
9
begin
10
Output('Error: no Device found', ocError);
11
Exit;
12
end;
13
PortName := CBPort.Items[Index];
14
try
15
Result := OpenCOM('\\.\' + PortName, Self);
16
except
17
Output(Format('Info: can not open port %s', [PortName]), ocInfo);
18
raise EAbort.Create('');
19
end;
20
end else
21
begin // one COM Port is selected
22
if Index > 1 then Exit;
23
PortName := Port;
24
try
25
Result := OpenCOM('\\.\' + PortName, Self);
26
except
27
raise Exception.CreateFmt('Error: can not open port %s', [PortName]);
28
end;
29
end;
30
try
31
Result.SetParams(Baudrate);
32
except
33
raise Exception.CreateFmt('Error: can not setup baudrate to %d', [Baudrate]);
34
end;
35
Output('Connecting on port ' + PortName + '...', ocInfo);
Hallo Hagen !
Danke für die erklärung der OpenComunication Function ! jetzt bin ich
schon wieder nen bißchen weiter ! :-)
Aber was ich eigentlich gemeint habe waren nicht die Sourcen die du mir
gemailt hast, sondern die Test-Dll aus dem AVRootloader.Zip !
Da hast du zwar die Anpassungen bezüglich der Ausgabe der Versionsnummer
usw. gemacht, aber die Implementierung der GetAppVersion usw. wohl nicht
vervollständigt ?! Ich kann Sie bei mir auf jedenfall nicht kompilieren
ohne besagte Fehlermeldungen !
Gruß Stefan
Hallo in die große Runde,
erstmal ein großes Lob für diesen super Bootloader! Respekt!
Nun zu einem kleinen Problem was ich habe.
Ich habe hier einen Attiny45 mit der neusten AVRootloader Version den
ich per 1-Wire (PB3) flashen möchte. Das funktioniert auch ohne Probleme
mit der in der pdf gezeigten Schaltung. Nun möchte ich aber einen FTDI
benutzen.
Ich habe dafür entsprechend im Bootloader folgende Zeile angepasst und
neu geflashed.
.equ UartInvert = 1
Bei der Schaltung habe ich einfach die Dioden entfernt. RX hängt also
direkt an PB3 und TX über den 2k Widerstand auch an PB3.
Nun leider funktioniert die Kommunikation gar nicht. Auf dem Oszi konnte
ich nach erstem Test keine Antwort des Tiny sehen. Irgendwann ist der
Pin dann einfach ein Ausgang und HIGH.
Meine zweite Frage wäre noch, wie die Verschaltung aussehen müssten,
wenn man mehrere Controller programmieren möchte. Das Vorgehen mit dem
BootSign hab ich verstanden.
Ich würde mal vermuten, dass vor jeden uC mit einem Widerstand am
1-Wire-Bus hängt oder? Sonst könnten sich die Controller ja gegenseitig
kurzschließen.
Vielen Dank!
PS: Danke nochmal für die tolle Software!
Grüße
Nachtrag:
Also ich hab folgendes probiert: UartInvert = 0 und mit der FTDI
Software eingestellt, dass die TX/RX Leitungen invertiert werden sollen.
Es klappt sofort!
Kann es sein, dass es dann ein Softwarefehler ist, wenn UartInvert = 1
und 1-Wire-Mode gleichzeitig an sind?
>Kann es sein, dass es dann ein Softwarefehler ist, wenn UartInvert = 1>und 1-Wire-Mode gleichzeitig an sind?
Denke ich nicht, es müsste funktionieren. Definieren wir erstmal:
- RX_out ist Output des FTDI für die empfangenen Daten
- TX_in in Input des FTDI für die zu sendenden Daten
Serienwiderstand 2k zwischen RX_out und TX_In. TX_In an AVR Pin.
Nun liegt bei 1-Wire, bei keiner Aktvität immer der Pullup nach VCC am
Pin an. Durch die Verschaltung am FTDI zieht aber RX_out über den 2K den
TX_In auf LOW Pegel.
Schaue also mal ob dein 2k Serienwiderstand in der richtgen Leitung ist.
Ich habe aber selber noch nicht diese Kombination getestet und es könnte
also durchaus sein das es damit noch Softwareprobleme gibt.
Wenn du mehrere AVRs über 1-Wire programmieren möchtest dann sollte
UartInvert=0 sein.
Jeder AVR könnte aus Sicherheitsgründen einen Serienwiderstand von zb.
220-470 Ohm am Pin haben, je nach VCC.
Normalerweise sollten die sich aber nicht in die Query kommen wenn alle
Bootloader der AVRs im definierten Zustand sind, dh. sie warten alle
erstmal das Connect Commando ab.
Wenn nun die AVRs alle unterschiedliche BootSign: haben dann reagiert
immer nur derjenige AVR der mit der jeweiligen BootSign: angesprochen
wurde, alle anderen AVRs lauschen nur auf der Leitung. Es gibt aber
denoch das Problem das durch dummen Zufall, während gerade ein AVR
programmiert wird, die Connect Sequenz im Datenstrom auftauchen könnte.
Somit würde ein zweiter AVR in die bestehende Verbindung zwischen
funken. Man sollte also die BootSign: der AVRs möglichst lang wählen und
so das die Wahrscheilichkeit das diese als Daten im normalen Datenstrom
vorkommen sehr gering ist.
Angenommen die BootSign's benutzen nur Großbuchstaben, sind 8 Zeichen
lang dann beträgt die Wahrscheinlichkeit für eine Fehldetektion 1 zu
229607785695641627262976 = 256^5 * 26^8. 256^5 für die ersten 5 Bytes ->
0x00,0x00,0x00,0x00,0x0D gefolgt von den 8 Buchstaben der Bootsign.
Alles bezogen auf die Übertragung von 13 normalen Datenbytes im
Datenstrom = 20282409603651670423947251286016 mögliche Kombinationen.
Die Bootsign der AVRs selber sollten sich stark voneinander
unterscheiden.
Die Bootloader Software ist im Grunde nicht dafür konstruiert worden,
ich weiß aber das es real funktioniert und wie man sieht ist es auch
bischen Wahrscheinlichkeitsrechnung ;)
Gruß Hagen
Hallo Hagen,
danke für deine ausführliche Antwort.
>- RX_out ist Output des FTDI für die empfangenen Daten>- TX_in in Input des FTDI für die zu sendenden Daten
Finde ich persönlich verwirrend, da RX für receive und TX für transmit
steht. D.h. RX ist der Empfangspin des FTDI und der TX der Sendepin des
FTDI. Bezogen auf den zweiten Kommunikationspartner genau umgekehrt,
aber das ist ja erstmal Konventionssache.
Der Widerstand ist in der Sendeleitung des FTDI, er verhindern ja z.B.
dass ein Kurzschluss entsteht, wenn der Tiny grad Sender ist. Tiny z.B.
High und FTDI Low. Passt soweit auch von der Schaltung. Einen
Pullupwiderstand gibt es ja gar nicht (abgesehen vom internen Pullup der
ja bestimmt aktiviert ist, wenn der Tiny Empfänger ist). Habe den
Nachmittag ein bisschen getestet und der Tiny meldet sich einfach nicht
im 1-Wire Modus mit aktivierter Invertierung.
Aber mit der Invertierung der Signale im FTDI klappt ja alles wunderbar.
>Normalerweise sollten die sich aber nicht in die Query kommen wenn alle>Bootloader der AVRs im definierten Zustand sind, dh. sie warten alle>erstmal das Connect Commando ab.
Das müsste aber voraussetzen, dass der Tiny Pin im Hauptprogramm nur als
Eingang genutzt wird oder? Weil wenn das BootSign keine Übereinstimmung
findet, laden die Tinys ja das Hauptprogramm und wenn dort eben der Pin
ein Ausgang ist, funken alle anderen uC dem einen der geflasht werden
soll in die quere. Oder wird der Bootvorgang angehalten, wenn ein
Connect Commando erkannt wurde, das BootSign aber nicht stimmt?
Die Sache mit den langen BootSigns ist ein guter Tip! Vielleicht mache
ich mal einen Testaufbau. Gibt es eigentlich eine Beschränkung in der
Zeichenanzahl des BootSign?
Nette Grüße
Mark
>Gibt es eigentlich eine Beschränkung in der Zeichenanzahl des BootSign?
ja, 256 Zeichen. 256 deshalb weil der Zähler beim Senden/Empfangen ein
8Bit Register ist. Würde man dies auf 0 setzen == 256 mod 256, dann kann
man 256 Zeichen als Maximalanzahl betrachten.
> Finde ich persönlich verwirrend, da RX für receive und TX für transmit
Ich habe in der Benamung nur die Sendrichtung mit angegeben, ergor
stimmen unsere Sichtweise ansonsten überein. Da ich aber weiß das hier
desöfteren Interpreatationsfehler gemacht werden, wollte ich nur sicher
gehen.
probiere mal folgende Modifikation:
Hallo Hagen !
Hab jetzt erstmal die Anbindung des FTDI per D2xx.dll auf Eis gelegt.
Ich bekomme trotz identischer Implementierung der vorhandenen FT_W32
functionen immernoch, für mich unerklärliche, Fehlermeldungen. Außerdem
funktioniert die Einbindung über VCP-Treiber ja zufriedenstellend.
Einziger Wehrmutstropfen war die fehlende automatische Erkennung des
richtigen Devices, die ich ja jetzt durch den Anmeldestring ersetzten
kann.
Damit wären wir dann bei meinem nächsten Problem. Da die Test-Dll
veraltet ist fehlt mir die Implementierung der neuen Funktionen.
Könntest du die wohl hier posten oder mir als PN zukommen lassen ?!
Ich habe übrigens noch einen Verbesserungsvorschlag für die
AVRootloader.asm ! Kannst du die so verändern, das bei aktivierter
Versionsverwaltung automatisch die Verschlüsselung aktiviert wird ?
Damit bin ich nämlich erstmal ganz schön auf die Schnautze gefallen !
:-)
(Ja ja, wer nicht lesen kann und so...)
Gruß Stefan
Hab gerade ein riesen Problem mit der Versionsüberprüfung !!
Immer wenn ich die Option im AVR aktiviere bekomme ich keinen Connect
mehr !!
Hab schon alle möglichen Konfigurtionen ausprobiert, auch
unterschiedliche BootSize und BootReset. Alles andere funktioniert
einwandfrei, nur wenn ich die Versionsprüfung aktiviere geht nichts mehr
!!
Irgendwelche Vorschläge ???
Gruß Stefan
@Hagen
Danke für die Modifikation! Kann ich aber erst in ca. einer Woche
testen, da ich jetzt erstmal eine Woche nicht mehr zu Hause bin. Melde
dann aber wies aussieht.
Grüße Mark
@Stefan:
>Hab gerade ein riesen Problem mit der Versionsüberprüfung !!>Irgendwelche Vorschläge ???
Welcher AVR, welche Konfiguration ?
Das Versioning funktioniert mit und ohne Verschlüsselung. Aber nur mit
aktivierter Verschlüsselung wird ein Update an Hand seiner
verschlüsselten neuen Versionnummer in der ACY Datei auch überprüft.
Ohne Verschlüsselung ist das Versioning ein informativer Wert, muß also
manuell verifiziert werden und kann jederzeit auch downgraded werden.
>Ich habe übrigens noch einen Verbesserungsvorschlag für die>AVRootloader.asm ! Kannst du die so verändern, das bei aktivierter>Versionsverwaltung automatisch die Verschlüsselung aktiviert wird ?
Also nein ;) da je nach Konfiguration so mehrere Möglichkeiten
entstehen.
Gruß Hagen
> Welcher AVR, welche Konfiguration ?
Atmega8, und an der Konfiguration hat sich nichts geändert zum
AVRootloader2 ! Habs mit und ohne Autobaud, mit und ohne Verschlüßelung,
usw. probiert ! Der AVR hängt übrigens an nem FT232R !
> Das Versioning funktioniert mit und ohne Verschlüsselung.
Dann hab ich das wohl falsch verstanden ! :-)
> Also nein ;) da je nach Konfiguration so mehrere Möglichkeiten> entstehen.
Hat sich ja dann auch erledigt, da es ja auch ohne Verschlüßelung
funktioniert ! Hatte halt die Verschlüßelung in Verdacht weshalb das bei
mir nicht funktioniert! Muß aber wohl woanders dran liegen !
Ich werde nacher nochmal nen paar Tests machen !
Gruß Stefan
Hallo Hagen !
Also hab mal noch nen paar Tests gemacht !
Ergebnis beim Versioning bleibt das gleiche ! Sobald es aktiviert ist
kein Connect.
Dann hab ich mal unter AppCMD einen Wert =Test eingegeben. Ergebnis:
Kein Connect !!!
Also schließe ich daraus das die Probleme irgendwo in der kommunikation
mit dem FTDI liegen müßen, da du und auch andere Benutzer anscheinend
keine Probleme haben !
Gibt es jemanden hier der den neuen AVRootloader zusammen mit einem FTDI
erfolgreich betreibt ?
Hab schon nen bißchen mit den Timeouts gespielt, leider ohne Ergebnis !!
Werde jetzt mal ne alte schaltung mit RS232 raussuchen und da mal
testen.
Gruß Stefan
@all
Also erstmal entwarnung was den FTDI angeht ! Der hat damit nichts zu
tun !
@Hagen
Das problem liegt beim irgendwo beim Reset des AVR ! Wenn ich per Hand
einen Reset ausübe(was in meiner Schaltung leider nicht verbaut ist)
bekomme ich problemlos einen Connect. Ohne den Reset bekomme ich keine
Verbindung !
Konfig:
- ATMega8 mit 10 MHZ-Kristall
- Nur der Rootloader installiert !
- Bootsize und Bootreset sind programmiert
- mit und ohne Autobaud getestet
Ohne Versioning und AppCmd klappt der Connect immer, mit einem der
beiden aktiviert geht nichts mehr !
Woran kann das liegen ?
Gruß Stefan
@Stefan:
benutze mal die Version im Attachment. Setze in AVRootloader.INI den
Wert in [System] -> Debug=1.
Mache einen Connect und schaue im Protokol nach was beim Wert "Received:
" angezeigt wird.
Je nach Konfiguration den AVRootloader.ASM sollte folgendes angezeigt
werden (in HEX)
1.) ohne Versioning, ohne BootMsg
4 Bytes BootInfo, 1 Byte SUCCESS Code $3x wobei X die Features anzeigen
2.) mit Versioning, ohne BootMsg
4 Bytes BootInfo, 4 Bytes Version ($FF,$FF,$FF,$FF bei ungeflashten
AVR), 1 Byte SUCCESS Code
3.) ohne Versioning, mit BootMsg
x Bytes BootMsg immer gerade Anzahl Bytes, 4 Bytes BootInfo, 1 Byte
SUCCESS Code
4.) mit Versioning, mit BootMsg
x Bytes BootMsg, 4 Bytes BootInfo, 4 Bytes Version, 1 Byte SUCCESS
- wenn die BootMsg definiert wurde dann wird sie immer als erstes
gesendet
- wenn es eine Version gibt dann wird sie als letztes gesendet und er
SUCCESS Code muß >= $38 sein, Version ist immer 4 Bytes, und bei AVRs
ohne geflashte Anwednung immer $FF,$FF,$FF,$FF
- BootInfo wird immer dazwischen gesendet und ist 4 Bytes
Der SUCCESS Code ist immer $30
+ $08 wenn UseVersioning = 1
+ $04 wenn UseCryptE2 = 1
+ $02 wenn UseCryptFASH = 1
+ $01 wenn UseCrypt = 1
Das System in der PC-Software geht nun so vor:
Warte auf Zeichen von RS232 bis Timeout von [Timeouts].Base eintritt.
Solange kein Timeout Fehler baue einen String aus allen empfangenen
Zeichen auf.
Nach einem Timeout zeige bei [System].Debug=1 in INI Datei den
empfangenen Sring HEX-formatiert im Protocol Fenster an.
Analysere nun diesen String:
- steht am Ende ein gültiger SUCCESS Code ?
- ist der SUCCESS Code mit UseVersiong konfiguriert ? wenn ja
vorhergenenden 4 Bytes als Verson interpretieren und wegschneiden, wenn
neun nur SUCCESS Code wegschneiden.
- nun stehen am Ende 4 Bytes an BootInfo, auswerten und auf
Plausibilität prüfen und wegschneiden.
- nun ist dieser String entweder leer oder enthält die BootMsg.
Gruß Hagen
Hallo Hagen
hab das mal alles der Reihe nach durchprobiert !
> 1.) ohne Versioning, ohne BootMsg>> 4 Bytes BootInfo, 1 Byte SUCCESS Code $3x wobei X die Features anzeigen
$93 $07 $03 $10 $37
> 2.) mit Versioning, ohne BootMsg>> 4 Bytes BootInfo, 4 Bytes Version ($FF,$FF,$FF,$FF bei ungeflashten> AVR), 1 Byte SUCCESS Code
nur recieved: !! hier findet auch vorher kein switch to 2-wire mode..
statt
> 3.) ohne Versioning, mit BootMsg>> x Bytes BootMsg immer gerade Anzahl Bytes, 4 Bytes BootInfo, 1 Byte> SUCCESS Code
abwechselnd:
recived: $C2 $C2 $C2
recived: $C2 $C2
egal was ich bei AppCmd eingebe !
> 4.) mit Versioning, mit BootMsg>> x Bytes BootMsg, 4 Bytes BootInfo, 4 Bytes Version, 1 Byte SUCCESS
wieder abwechselnd:
recived: $C2 $C2 $C2
recived: $C2 $C2
habs mit und ohne AutoBaud versucht ! Und hab auch mal den Timeout enorm
erhöht (500 !), gleiches Ergebnis !
Kannst du damit was anfangen ?
Gruß Stefan
$C2 = ERRORCRC, der AVR Bootloader scheint also zu antworten was
bedeuten würde das er schon längst in der Command FSM läuft, also
connected ist.
Probiere mal als AppCmd
1.)
AppCmd=/00/00/00/00
2.)
AppCmd=test/00/00/00/00
wir senden also par Nullen mehr, also Kommando "Restart Bootloader".
Du kannst auch längere Sequenzen aus Nullen ausprobieren.
Woher dein Problem nun rührt kann ich dir auch nicht sagen. Du meinst
also das mit der alten Version 2.0 keinerlei Probleme mit deiner HW
entsteht, aber mit der neuen wie oben beschrieben.
Wenn du AVRootloader.asm in AVRStudio kompilierst dann gibts keine
Fehler oder Warnungen ?
Ausgewählte BootSign stimt mir der im ASM überein ?
Gruß Hagen
PS: ich sleber habe nun schon mit ATMega162 und ATiny461 alle Optionen
getestet, Laptop-RS232 mit 1-Wire, geht wunderbar.
Hagen du bist der Beste !!
Sobald ich in der AppCmd ein /00 einsetze geht es !!!
Und zwar beide Funktionen !!!
Und wenn du nicht weißt woran das liegt, dann weiß ich das schon lange
nicht !
Ist mir persönlich aber egal, ich kann mit der Lösung leben !!
Vielen Dank !!!
Gruß Stefan
PS: Wenn du mir jetzt noch die Implementation der 3 neuen Funktionen für
die Test-Dll zukommen lassen könntest, wäre das Spitze !! :-)
>PS: Wenn du mir jetzt noch die Implementation der 3 neuen Funktionen für>die Test-Dll zukommen lassen könntest, wäre das Spitze !! :-)
Ist doch im letzten ZIP drinnen ? oder was meinst du ?
Gruß Hagen
> Ist doch im letzten ZIP drinnen ? oder was meinst du ?
Sorry ! Hab mich vielleicht falsch ausgedrückt ! Meinte den Aufruf der
Funktionen in der Test-Unit !
Also sowas in der Richtung:
1
function TForm1.GetACYFileName: WideString;
2
begin
3
Result := ExtractFilePath(ParamStr(0)) + 'test.acy';
4
end;
Ich will die Functionen ja auch gerne in mein eigenes programm
übernehmen !
>Das Problem mit dem FTDI scheint ein Timing Problem zu sein.>>Hast du mal mehre Nullen zusätzlich getestet ?
Ja hab ich ! Bis zu 12x /00 hintereinander ! Macht aber keinen
Unterschied ! 1x /00 reicht aus ! Ist schon komisch, oder ?!?
Gruß Stefan