Anbei mein AVRootloader.
- unterstützt alle selbstprogramierbaren 8Bit-AVRs
- 1-Wire und 2-Wire RS232 Modus, invertierbar
- Baudraten je nach XTAL von 600 bis zu 256000 Baud per USB-RS232
- XTEA Verschlüsselung für FLASH/EEPROM Schreiben
- 16Bit CRC für die komplette Datenübertragung, Senden & Empfangen
- FLASH schreiben/löschen mit implizitem Verify
- separates FLASH Verify
- EEPROM schreiben/lesen, schreiben mit implizitem Verify
- SRAM schreiben/lesen
- Baudrate Detektion, Baudrate kann aber auch fest eingestellt werden
- WatchDog Unterstützung
- fertige PC-Software mit HEX-Editoren für EEPROM & SRAM/Registerfile/IO
Ports
- ATmega128 bei 115200 Baud in 16 sec mit Verschlüsselung 22 Sekunden
- im ZIP Datei AVRootloader.txt enthält Anleitung
- je nach Konfiguration zwischen 344 bis 906 Bytes Codegröße, letzters
mit XTEA Entschlüsselungsfunktion
Gruß Hagen
Hallo Hagen,
mal 'ne andere Frage, womit hast Due die Windows-Applikation
programmiert?
Nur eine EXE, das gefällt mir und die Optik ist Dir auch ganz gut
gelungen.
Danke.
Gast
@Peter: Ich habe sie nach Datenblatt des ATTiny461 und ATMega88-168
programmiert. Ist sie etwa falsch ?
@Gast: Ja ist Delphi 5. Der HEX-Editor ist von Mirkes.de wobei ich
diesen nur empfehlen kann weil es der einzigste freie für Delphi auf dem
Markt ist.
COM Port Zugriff habe ich in eigenes Objekt implementiert und benutzt
Overlapped-IO.
Gruß Hagen
@Werner,
BAT54C sind SMD in SOT23, keine Z-Dioden, sind Schottky Dioden. Ist
eventuell beim Eagle Symbol nicht so gut erkennebar ?!
Wichtig ist der 2k Widerstand, bei Peters Bootloader wurde dort ein 4k7
angegeben. Ich habe diese bei meinen Tests mit ATmega128, ATmega168 und
ATtiny461 dann auf 2k reduziert. Als RS232 habe ich die RS232 meines
Laptops, der Dockingstation des Laptops und ein USB-RS232.Kabel
getestet. Mit dem 2k ging es besser, aber ich benutze auf AVR Seite ja
auch nur den interne PullUp statt einem externen. Das hat dann alles
funktioniert mit Baudrate von 600 bis 256000 Baud, vorrausgesetzt der
Takt des AVRs ist hoch genug für die hohen Baudraten. Den ATtiny461 habe
ich mit internem RC Oszillator + PLL laufen, sind dann 16MHz. Den
ATMega128 mit externem Quarz bei 15.97MHz.
@Peter,
ich habe noch mal in das ATmega168 Datenblatt geschaut und ich meine das
ich keinen Fehler mit dem Watchdog gemacht habe. Im Datenblatt Seite 48
ist exakt die Sequenz angegeben die ich auch benutzt habe, eben mit dem
Unterschied das WDE über die ODER Verknüpfung gesetzt wird, ist auf
Seiet 47 ebenfalls beschrieben.
Testen konnte ich den WatchDog eben nur für die genannten 3 AVRs und da
hat er funktioniert.
Nur beim ATTiny461 sind par Ungereimtheiten die aber nichts direkt damit
zu tuen haben. Wenn man bei dem Teil die WDTON Fuse setzt und dann
wieder löscht so wird der WatchDog solange mit ständig gesetzem WDE Bit
laufen bis man dem AVR den Saft abdreht. Ein RESET setzt das WDE Bit
noch lange nicht zurück. Anderst ausgedrückt: löscht man die WDTON Fuse
dann muß man dem AVR den Saft abdrehen damit das auch eine Wirkung
erzielt. Ein einfaches RESET reicht nicht aus. Dh. nach dem Löschen von
WDTON verhält sich der AVR noch solange als ob WDTON gesetzt ist bis er
keinen Saft mehr hat !! Das hat mich Stunden an Fehlersuche gekostet und
ich war schon der Meinung ich habe den ATTiny461 geschrottet.
Gruß Hagen
Hagen Re wrote:
> @Peter,> ich habe noch mal in das ATmega168 Datenblatt geschaut und ich meine das> ich keinen Fehler mit dem Watchdog gemacht habe.
Hab ich ja nicht behauptet, sondern das es die gleiche Sequenz ist, die
ich als letztes gepostet hatte. Sie sollte daher funktionieren.
Ich hatte vorher ne andere, die nicht funktioniert hat.
Man darf beim ersten Schreiben nicht die WDP-Bits anders setzen, dann
wirds ignoriert.
Steht aber nirgends im Datenblatt. Hat mich auch einige Zeit gekostet.
Den Rest des Codes habe ich noch nicht verdaut.
Ich hab da immer Probleme mit so großen monolitischen Brocken, daher
unterteile ich gerne alles in kleine Häppchen. Auch wenn dann vielleicht
ein paar CALLs und RETs mehr an Code entstehen.
Dein Code ist ja auch äußerst sparsam kommentiert.
Die Umleitung des Bootloader-Reset bei den ATtinyxxx/ATmega48 machst Du
vermutlich schon in der EXE.
Ich habs deswegen im AVR gemacht, damit selbst bei Empfangsfehlern kein
Aussperren möglich ist. Ist ja auch nicht viel Code.
Zumindest das Löschen sollte aber von oben nach unten erfolgen.
Peter
Hi Peter,
>Ich hatte vorher ne andere, die nicht funktioniert hat.>Man darf beim ersten Schreiben nicht die WDP-Bits anders setzen, dann>wirds ignoriert. Steht aber nirgends im Datenblatt.
Hm das es ignoriert werden soll wusste ich auch nicht. In irgendeinem
der Datenblätter steht aber das man die WDP Bits erst setzen sollte wenn
man vorher das WDCE Bit einmalig gesetzt hat da ansonsten der WatchDog
Prescaler beim Verkürzen der Zeitspanne schon vorzeitig auslössen
könnte.
>Den Rest des Codes habe ich noch nicht verdaut.>Ich hab da immer Probleme mit so großen monolitischen Brocken, daher>unterteile ich gerne alles in kleine Häppchen. Auch wenn dann vielleicht>ein paar CALLs und RETs mehr an Code entstehen.
Ja verstehe ich. Der Bootloader sollte so kompakt wie möglich werden und
da sind Optimierungen über die einzelnen Blöcke hinaus manchmal
notwendig. Es ist schon blöde wenn wegen 2 Bytes zuviel an Code der
Bootloader eine ganze FLASH Page mehr benötigt.
>Dein Code ist ja auch äußerst sparsam kommentiert.>Die Umleitung des Bootloader-Reset bei den ATtinyxxx/ATmega48 machst Du>vermutlich schon in der EXE.
Ja, das ist aber auch abgesichert. Bei solchen AVRs wird erstmal der
letzte FLASH Block gelöscht. Dann die 1. Page Programmiert. Der
Bootloader arbeitet dabei immer mit einer CRC Prüfsumme beim Übertragen
der Befehle und den darauf folgenden Daten der 1. Page. Nachdem der
Bootloader die 1. Page programmiert hat wird auch immer gleich ein
Verify gemacht. Dh. das FLASHEN/Löschen von Pages und Schreiben in den
EEPROM enthält ein implizites Verify.
Benutzt man die Verschlüsselung so hat man sogar eine 64 Bit Prüfsumme
inkusive über den XTEA mit Doppel-CBC Modus. Wenn dabei nur 1 Bit falsch
sein sollte so propagiert sich dieser Bit Fehler durch alle
nachfolgenden Datenblöcke bis zum letzten Datenblock. Der letzte
Datenblock enthält eine 32 Bit Signatur (ersten 4 Bytes des Passwortes).
Ich hatte noch darüber nachgedacht per DEFINES zuschaltbar eine ähnlich
Vorgehensweise wie bei deinem Bootloader umzusetzen, aber so langsam
verbraucht das Projekt einfach zuviel Zeit. Es fragt sich wie
gering/hoch sind die Wahrscheinlichkeiten.
Das mit der Souceformatierung ist so'ne Sache, jeder hat da seine
Vorlieben. Ich mage es in gewisssen Projekttypen wenn ich nicht so viel
zersplitterte Sourcedateien habe da man so den Überblick hat. Das
Einlesen/Überblicken ist für Neulinge dann einfacher.
Gruß Hagen
Hallo Hagen,
hast Du vor Deine Delphi-Sourcen auch zu posten? Ich würde mir gerne mal
ansehen, wie Du die Übertragung der Dateien zu Kontroller realisiert
hast. Ich bin im Augenblick dabei ein kleines Programm zu entwickeln,
dass EEPROM-Inhalte an den Kontroller übertragen soll, aber irgendwie
bekomme ich das nicht vernünftig hin.
Gruß
Frank
Hallo Hagen,
ich wollte deinen bootloader auf einen m168 ausprobieren, aber leider
komme ich nicht zum Erfolg.
a) Hardware: habe einen FTDI232BM zwischen dem mega168 und USB hängen
der mega168 ist im 256word boot mode gefused.
b) SW
1
; copyright HR
2
3
.nolist
4
5
; supported devices
6
;.include "can128def.inc" ; AT90CAN128
7
;.include "can32def.inc" ; AT90CAN32
8
;.include "can64def.inc" ; AT90CAN64
9
;.include "m1280def.inc" ; ATmega1280
10
;.include "m1281def.inc" ; ATmega1281
11
;.include "m128def.inc" ; ATmega128
12
;.include "m161def.inc" ; ATmega161
13
;.include "m162def.inc" ; ATmega162
14
;.include "m163def.inc" ; ATmega163
15
;.include "m164Pdef.inc" ; ATmega164P
16
;.include "m165def.inc" ; ATmega165
17
;.include "m165Pdef.inc" ; ATmega165P
18
.include "m168def.inc" ; ATmega168
19
;.include "m168Pdef.inc" ; ATmega168P
20
;.include "m169def.inc" ; ATmega169
21
;.include "m169Pdef.inc" ; ATmega169P
22
;.include "m16def.inc" ; ATmega16
23
;.include "m2560def.inc" ; ATmega2560
24
;.include "m2561def.inc" ; ATmega2561
25
;.include "m323def.inc" ; ATmega323
26
;.include "m324Pdef.inc" ; ATmega324P
27
;.include "m3250def.inc" ; ATmega3250
28
;.include "m3250Pdef.inc" ; ATmega3250P
29
;.include "m325def.inc" ; ATmega325
30
;.include "m325Pdef.inc" ; ATmega325P
31
;.include "m3290def.inc" ; ATmega3290
32
;.include "m3290Pdef.inc" ; ATmega3290P
33
;.include "m329def.inc" ; ATmega329
34
;.include "m329Pdef.inc" ; ATmega329P
35
;.include "m32def.inc" ; ATmega32
36
;.include "m406def.inc" ; ATmega406
37
;.include "m48def.inc" ; ATmega48
38
;.include "m48Pdef.inc" ; ATmega48P
39
;.include "m640def.inc" ; ATmega640
40
;.include "m644def.inc" ; ATmega644
41
;.include "m644Pdef.inc" ; ATmega644P
42
;.include "m6450def.inc" ; ATmega6450
43
;.include "m645def.inc" ; ATmega645
44
;.include "m6490def.inc" ; ATmega6490
45
;.include "m649def.inc" ; ATmega649
46
;.include "m64def.inc" ; ATmega64
47
;.include "m8515def.inc" ; ATmega8515
48
;.include "m8535def.inc" ; ATmega8535
49
;.include "m88def.inc" ; ATmega88
50
;.include "m88Pdef.inc" ; ATmega88P
51
;.include "m8def.inc" ; ATmega8
52
;.include "pwm2Bdef.inc" ; AT90PWM2B
53
;.include "pwm2def.inc" ; AT90PWM2
54
;.include "pwm3Bdef.inc" ; AT90PWM3B
55
;.include "pwm3def.inc" ; AT90PWM3
56
;.include "tn13def.inc" ; ATtiny13
57
;.include "tn2313def.inc" ; ATtiny2313
58
;.include "tn24def.inc" ; ATtiny24
59
;.include "tn25def.inc" ; ATtiny25
60
;.include "tn261def.inc" ; ATtiny261
61
;.include "tn44def.inc" ; ATtiny44
62
;.include "tn45def.inc" ; ATtiny45
63
;.include "tn461def.inc" ; ATtiny461
64
;.include "tn84def.inc" ; ATtiny84
65
;.include "tn85def.inc" ; ATtiny85
66
;.include "tn861def.inc" ; ATtiny861
67
;.include "usb1286def.inc" ; AT90USB1286
68
;.include "usb1287def.inc" ; AT90USB1287
69
;.include "usb162def.inc" ; AT90USB162
70
;.include "usb646def.inc" ; AT90USB646
71
;.include "usb647def.inc" ; AT90USB647
72
; unsupported devices, no self programming or sram to small
73
;.include "1200def.inc" ; AT90S1200
74
;.include "2313def.inc" ; AT90S2313
75
;.include "2323def.inc" ; AT90S2323
76
;.include "2343def.inc" ; AT90S2343
77
;.include "4414def.inc" ; AT90S4414
78
;.include "4433def.inc" ; AT90S4433
79
;.include "4434def.inc" ; AT90S4434
80
;.include "8515def.inc" ; AT90S8515
81
;.include "8535def.inc" ; AT90S8535
82
;.include "AT86RF401def.inc" ; AT86RF401
83
;.include "m103def.inc" ; ATmega103
84
;.include "tn11def.inc" ; ATtiny11
85
;.include "tn12def.inc" ; ATtiny12
86
;.include "tn15def.inc" ; ATtiny15
87
;.include "tn22def.inc" ; ATtiny22
88
;.include "tn26def.inc" ; ATtiny26
89
;.include "tn28def.inc" ; ATtiny28
90
91
#message "compile for" __PART_NAME__
92
93
.ifndef PageSize
94
.error "Device don't support Bootloader !"
95
.else
96
97
98
99
.equ UseWDR = 0 ; set to 0/1 to de/activate WatchDog
100
.equ UseAutobaud = 1 ; set to 0/1 to de/activate Baudrate Detection
101
.equ UseVerify = 1 ; set to 0/1 to de/activate Verify FLASH Command, FLASH write/erase includes implicit verify, can be deactivated
102
.equ UseE2Write = 1 ; set to 0/1 to de/activate EEPROM Write Command
103
.equ UseE2Read = 1 ; set to 0/1 to de/activate EEPROM Read Command
104
.equ UseSRAM = 0 ; set to 0/1 to de/activate SRAM Commands
105
.equ UseCrypt = 0 ; set to 0/1 to de/activate cryptography
106
.equ UseCryptFLASH = 0 ; set to 0/1 to de/activate only use cryptography for writing to FLASH
107
.equ UseCryptE2 = 0 ; set to 0/1 to de/activate only use cryptography for writing to EEPROM
108
.equ UartInvert = 1 ; set to 1 to invert UART levels, for RS232 drivers such as MAX232
109
110
.equ RX_PORT = PORTD ; Receive Port and Pin
111
.equ RX = PD0
112
.equ TX_PORT = PORTD ; Transmit Port and Pin
113
.equ TX = PD1
114
115
.set XTAL = 14745600 ; only important for BootDelay if Autobaud is used
116
.set BootDelay = XTAL / 3 ; 300ms
117
.set BootBaudrate = 115200 ; only used if no Baudrate Detection activated, XTAL is important
118
.set BootVersion = 1 ; Version 1
119
.set BootCodeSize = 494 ; compile and set to value in [.cseg] Used, compile again
c) error Meldung im flash Windowsprogramm:
30.03.08-22:24:34-875 > Connecting...
30.03.08-22:24:34-968 > Switch to 2-Wire mode
30.03.08-22:24:39-328 > Device connected
30.03.08-22:24:39-359 > programming Device...
30.03.08-22:24:39-375 > execute compiled data
30.03.08-22:24:39-375 > selected options in compiled file:
30.03.08-22:24:39-375 > - programming FLASH
30.03.08-22:24:39-375 > - erase FLASH during programming
30.03.08-22:24:39-375 > - full verify FLASH after programing
30.03.08-22:24:39-375 > - programming EEPROM
30.03.08-22:24:39-546 > ICOM: read error.
30.03.08-22:24:39-578 > Device disconnected
hast du eine Idee?
Gut, das heist 90% der wichtigen Arbeit geht schonmal, er hat eine
2-Wire Verbindung erkannt und alle Device-Infos sind korrekt empfangen.
Ich habe die Timeouts sehr knapp bemessen. Bei den Zeiten für das
Programmieren des FLASHs und EEPROMs habe ich fast alle Datenblätter
duchwühlt und die maximalen Zeiten angenommen. Leider scheint es so zu
sein das manche AVRs längere Zeiten benötigen als im Datenblatt
angegeben.
Ich habe nun mal die wichtigsten Timeouts in der INI konfigurierbar
gemacht. In der Section [Timeouts] kannst du das einstellen. Erhöhe als
erstes den Timeout für Flash=25. Bis auf "Buffer" und "Base" Timeout
kann man eigentlich alle Timouts nach oben setzen ohne das sich was an
den Gesamtprogrammierzeiten verändern sollte. Der Timeout "Base" ist
speziell, normalerweise berechnet die Software den BaseTimeout nach der
eingestellten Baudrate, also den Timeout für 1 Zeichen bis es komplett
übertragen wurde. Mit dem Wert in "Base" kann man nun die minimale
Wartezeit für diesen Timeout einstellen. Bei hohen Baudraten kann also
der Timeout für 1 Zeichen unter zb. 25 Millisekunden betragen. Möchte
man das auf 25 ms limitieren dann stellt man dies in "Base=25" ein.
In AVRootloader.asm habe ich noch eine klitzekleine Verbesserung bei der
XTEA Entschlüsselung die uns 6 Bytes FLASH einspart eingebaut.
Desweiteren habe ich beim 2-Wire die Ansteuerung so verändert das der
RX-PIN mit Pullup arbeitet falls man beide PINs RX und TX auf den
gleichen Port gelegt hat.
Gruß Hagen
Ach übrigens, das Full Verify kannst du eigentlich immer abhacken. Die
FLASH löschen und schreiben und EEPROM schreiben Funktionen haben ein
implizites Verify integriert. Das zusätzliche Full Verify dient
eigentlich nur dazu um überprüfen zu können ob das schon geflashte
Program auf dem AVR mit dem aktuellen HEX File identisch ist.
Und da du noch par Bytes Platz hast empfehle ich dir die Watchdog
Unterstützung zu aktivieren. Der Watchdog wird damit nicht explizit
aktiviert aber falls du per WachtDog aus deiner Applikation in den
Bootloader springen möchtest oder generell den WatchDog eingeschaltet
hast dann ist das sehr hilfreich.
Ich benutz eigentlich zwei Arten um aus der Anwendung in den Bootloader
zu springen. Das ist sehr hilfreich beim Automatischen Programmieren des
AVRs. Bei den ATtinys überwache ich per PinChange ISR den RX Pin und
nutz eine ISR wie nachfolgende
1
// Pinchange ISR für PB6, bei LowLevel springen wir den Bootloader an
2
__attribute__((naked))ISR(PCINT_vect){
3
4
if(PINB&(1<<PB6)){
5
asmvolatile("reti");
6
}else{
7
asmvolatile("rjmp __vectors");
8
}
9
}
10
11
intmain(void){
12
13
MCUSR=0;
14
WDTCR=(1<<WDE)|(1<<WDCE);
15
WDTCR=0;
16
// RX Pin auf Eingang mit Pullup
17
DDRB=0;
18
PORTB=(1<<PB6)
19
// PinChange on PB6, Bootloader Pin
20
GIMSK=(1<<PCIE1);
21
PCMSK1=(1<<PCINT14);
22
sei();
23
24
..blabla
25
while(1){
26
}
27
}
Das hat den Vorteil das man die laufende Anwendung durch die PC-Software
automatisch in den Bootlaoder kommt. Da es ohne Watchdog per direktem
RJMP geht kann man über den SRAM Befehl der PC-Software den aktuellen
Inhalt des SRAMs und IO/PORT Bereiches auslesen und analysieren.
Ansonsten gehts auch über den WatchDog.
1
// Pinchange ISR für PB6, bei LowLevel springen wir den Bootloader an
Hallo Hagen,
super vielen Dank für dein schnelles update.
Ich habe deinen neuen Bootloader auf den mega168 mit gleichen settings
geflasht. Das flashen mit dem neuen Windows programm hat auf anhieb
geklappt. Ich brauchte keine weiteren timings anpacken. Baudrate war
256000b/s (FTDI chip).
Wollte dann rausfinden welches der minimum timeout Wert ist und bliebt
dann bei Flash=13 hängen. Alles über 13 war OK. Flash und Eeprom konnte
beides gleich gut geschrieben werden.
Mir ist allerdings aufgefallen, das ich das EEPROM nur mit max. 38400b/s
auslesen konnte ("EEPROM Content"). Hohere Baudratenwerte resultierten
zu einem "ICOM: read error". Auch ist unter "EEPROM Content" der "write
to devive" Button dekativiert, wenn ich ein externes *.eep file geladen
habe.
Bei "SRAM content" sieht es genau so aus. Leider nur bis 38400b/s ist
das auslesen möglich.
Crypted habe ich auch geflashed und hat auch geklappt. Einen minimalen
Geschwindigkeitunterschied habe ich bemerkt, aber dieser war klein 2,22s
zu 2,63sek bei 256000b/s.
...
Du hast zwar geschrieben, das der Bootloader so gut wie fertig ist, aber
ich würde trotzdem gerne paar kosmetische Wünsche äußern.
a)
Bei den folgenden settings brauche ich genau 514 bytes Bootcode size.
Kann man das vieleicht noch um 2 bytes drücken, damit es in die 256words
boot block passt? Gibt es da noch Optimierungsmöglichkeiten?
.equ UseWDR = 0
.equ UseAutobaud = 1
.equ UseVerify = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseSRAM = 1
.equ UseCrypt = 0
.equ UseCryptFLASH = 0
.equ UseCryptE2 = 0
.equ UartInvert = 1
b) eine Fortschrittsanzeige beim flashen wäre nett. Es wird zwar
"working" angezeigt und er hat 16kb in 2,2sek reingeflashed, aber wenn
ein Laufbalken keine Mühe machen würde, wäre das klasse.
vielen Dank für den tollen Loader + Windows Application. Großes
Dankeschön auch an Peter, der viel dazu beigetragen hat.
mfg.
chris
@Chris,
>Mir ist allerdings aufgefallen, das ich das EEPROM nur mit max. 38400b/s>auslesen konnte...
Erhöhe den Wert für [Timeouts] Buffer=10 oder Base=50.
Anbei mal die neuste Version. Ich habe das Fehlerhandling dahingehend
geändert das man sieht in welcher internen Funktion eine Exception
ausgelösst wurde. Das vereinfacht uns die Suche nach der richtigen
Stelle für die wir den Timeout anpasssen müssen. Leider ist es so das
Windows ganz unterschiedlich nach Treiber des Seriellen Gerätes die
Timeouts benötigt. Ohne Timeouts geht es nicht und mit zu großen
Timeouts verplempern die Gerätetreiber mehr Zeit als der Rest der Arbeit
kostet.
Teste es nochmal mit der neusten Version und sage mir was für eine
Fehlermeldung kommt. Dann kann ich dir genau sagen welchen Timeoutwert
wir erhöhen müssen.
>Crypted habe ich auch geflashed und hat auch geklappt. Einen minimalen>Geschwindigkeitunterschied habe ich bemerkt, aber dieser war klein 2,22s>zu 2,63sek bei 256000b/s.
Bei einem ATMega128 ist der Unterschied 16 sec. zu 22 sec. wobei der
ATMega mit 16Mhz läuft. Leider ist eben sichere Kryptography per
Software auf dem AVR immer aufwendig. Der XTEA ist da schon schnell im
Vergleich zu zb. DES oder AES. Man kann ungefähr 700 Takte pro Datenbyte
rechnen.
>Bei den folgenden settings brauche ich genau 514 bytes Bootcode size.>Kann man das vieleicht noch um 2 bytes drücken, damit es in die 256words>boot block passt? Gibt es da noch Optimierungsmöglichkeiten?
Kenn ich und mich nervt das dann auch sehr ;)
Du kannst UseVerify=0 setzen. Wie schonmal gesagt ist diese Option für
den Hobby-Betrieb meistens überflüssig. Alles an Datenübertragung ist
per 16Bit CRC abgesichert. Zuerst überträgt man 2 Bytes Kommandocode
dann darüber eine 2 Bytes CRC. Sollte also da schon ein Bitfehler
aufgetreten sein merkt das die Software schon frühzeitig. Bei den
Komandos du danach noch weitere Daten senden werden diese wiederum per
CRC abgesichert.
Nachdem man also einen FLASH/EEPROM Datenbuffer gesendet hat wird der
Befehl zum Schreiben der Daten in den FLASH/EEPROM gesendet. Beide
Fuktionen schreiben die Daten weg und verifizieren anschließend die
geschriebenen Daten, indem diese Funktionen den FLASH/EEPROM erneut
auslesen, mit den Daten im Buffer. Somit hat man schon ein implizites
Verify das sehr schnell geht da keine Daten erneut zum AVR gesendet
werden müssen. Die einzigste Schwachstelle an dem Konzept ist als die
CRC Prüfsumme über die empfangenen Daten. UU. kann es vorkommen das
mehrere Bitfehler gleichzeitg auftreten und die CRC Prüfsumme versagt.
Dann schreibt man quasi fehlerhafte Daten in den FLASH und das implizite
Verify merkt davon nichts. Bei meinen Test mit absichtlich schlecht
gewählten Baudraten und somit ständigen Fehlern hat der AVR nicht ein
einzigstes Mal den Datenübertragungsfehler nicht bemerkt. Bei meinen
Test war nur eine Baudrate von 256000 kritisch (bei 16Mhz Takt mit
interner PLL und RC-Oszi auf ATtiny461). Im Besonderen ist das Lesen von
Daten vom AVR bei 256000 Baud kritisch. Die interne Zeitschleife ist
dann sehr kurz und benötigt bei 16Mhz nur 33 Takte.
Ich würde dir also raten wieder auf 128000/115200 Baud runter zu gehen.
Wenn du das mal genauer analysierst (also die Programmierzeiten) so
wirst du feststellen das die USB-RS232-Treiber keinen großen
Geschwindigkeitsvorteile bringen. Bei mir ist es sogar so das eine
normale COM-Schnitstelle bei 115200 leicht schneller ist als ein
USB-RS232-Dongle bei 256000. Davon mal abgesehen, erzeugt dieser
USB-RS232 Treiber auf meinem System bei dieser Baudrate sporadisch einen
Bluescreen (das sind die einzigsten Bluescreens die ich seit Jahren
gesehen habe auf meinem System!)
Ansonsten könntest du UseAutobaud=0 setzen, du benutzt ja einen externen
Quarz.
Oder du verkürzt BootSign: db. "BOOT" auf zb. "BT". Dann gehst du in
AVRootloader.INI und ändert in [System] Sign=BT um.
Was anderes fällt mir nicht ein, es gibt aus meiner Sicht keine anderen
Möglichkeiten des Code noch kürzer zu machen ohne das man was an der
Funktionalität verändert.
>b) eine Fortschrittsanzeige beim flashen wäre nett. Es wird zwar>"working" angezeigt und er hat 16kb in 2,2sek reingeflashed, aber wenn>ein Laufbalken keine Mühe machen würde, wäre das klasse.
Nicht so einfach möglich, auf Grund des Datenkonzeptes schon. Denn wenn
wir mit verschlüsselten Daten arbeiten dann wird alles in eine binäre
"Scriptdatei" compiliert, passiert auch bei unverschlüsselten Daten,
aber die Verschlüsselung war der Grund für diese Scriptdateien. Eine
solche Scriptdatei ist quasi eine Liste aller Befehle + Daten die an den
AVR gesendet werden. Vorteil ist eben das ich das als Basis für weitere
Features benutzen wollte, zb. man kann extern solche Scripte erzeugen
und durch meine Software ausführen lassen.
Nun das verschlüsselte Format verschlüsselt nicht nur die Daten und ihre
wahre Größe sondern auch die Addresen an die diese Daten geflasht werden
sollen. Da meine Sofwtare beim Erzeugen solcher Dateien auch "Lücken" im
FLASH die nur mit 0xFF gefüllt werden erkennt und entfernt (dh. es
werden nur Pages programmiert die nicht vollständig mit 0xFF gefüllt
sind, solche Pages werden per Erasekommando nur gelöscht).
Es gibt also konzeptionell gesehen keine so einfache Möglichkeit einen
Fortschrittsbalken zu bauen, bzw. wenn dann würde er eher nach der
Anzahl der Befehle funktionieren und keinen zeitlichen Zusammenhang zur
Gesamtdauer der Befehle enthalten.
Ich denke mal drüber nach, aber dann kann es nur so sein das ich die
Anzahl der abzuarbeitende Befehle/Kommandos dafür benutze.
>Auch ist unter "EEPROM Content" der "write>to devive" Button dekativiert, wenn ich ein externes *.eep file geladen>habe.
Hm geht schon nur gewusst wie ;) Ich habe diesen "Fehler" aber in obiger
Version beseitigt. Normalerweise ist es nämlich so das du im HEX Editor
Daten veränderst. Diese werden rot markiert dargestellt. Im
EEPROM-HEX-Editor kannst du per rechten Mausklick ein Popupmenu öffen
mit dem du diese Selektion auch selber setzen kannst. Markiere einfach
mal im EEPROM die Addressen 0x0000 bis 0x001F. Dann Rechten Mausklick
und im Popup "Select Cells" auswählen. Wenn du nun "Write to Device"
oder "Save to File" anklickst so werden nur diese ausgewählten Zellen
programmiert bzw. gespeichert. Alle anderen nicht markierten Zellen
werden im AVR nicht verändert. Lange Rede kurzer Sinn: Man kann also von
einem AVR den EEPROM auslesen. Dann markiert/editiert man nur einen
ausgewählten Bereich davon und speichert das in eine EEP Datei. Nun
wählt man diese EEP Datei samt HEX Datei für den FLASH auf der 1. Page
der Sofwtare. Dann drückt man "Copile" und erzeugt eine ACY-Datei. Wird
diese Datei ausgeführt dann werden nur die EEPROM Zellen programmiert
die man vorher manuell ausgewählt hat.
Sinn ist es das man selektive Konfigurationen in das EEPROM schreiben
kann.
In der neusten Version wird wenn nichts in den HEX-Editoren selektiert
ist alles geschrieben. Beim SRAM Content aber nur der SRAM Bereich. Das
violette Registerfile und der grüne IO-Bereich wird nicht geschrieben.
Den IO-Bereich musst du also weiterhin explizit editieren.
>vielen Dank für den tollen Loader + Windows Application. Großes>Dankeschön auch an Peter, der viel dazu beigetragen hat.
Ja dem schließe ich mich an, habe viel gelernt.
Gruß Hagen
Hallo Hagen,
deine ausführlichen Antworten sind wirklich bemerkenswert. Du steckst ne
menge Zeit da rein, aber ich denke ich habe nun alles soweit hinbekommen
und verstanden.
>Erhöhe den Wert für [Timeouts] Buffer=10 oder Base=50.>Anbei mal die neuste Version. Ich habe das Fehlerhandling dahingehend>geändert das man sieht in welcher internen Funktion eine Exception>ausgelösst wurde.
Deine neue Windows Applikation gibt mir folgende Meldung aus, wenn Base
auf 25 steht.
Connecting...
31.03.08-21:48:09-064 > Switch to 2-Wire mode
31.03.08-21:48:09-846 > Device connected
31.03.08-21:48:09-877 > read EEPROM...
31.03.08-21:48:09-908 > CmdReadEeprom.ReadByte(1) ICOM: read error.
31.03.08-21:48:09-924 > Device disconnected
Durch Erhöhung des Wertes auf 50 funktioniert es gut. Es gibt keine
Fehlermeldung mehr. Allerdings auch genau ab 50, Werte <50 resultieren
im oben genannten Fehler. Dies habe ich bis max. Baudrate getestet.
>>Bei den folgenden settings brauche ich genau 514 bytes Bootcode size.>>Kann man das vieleicht noch um 2 bytes drücken, damit es in die 256words>>boot block passt? Gibt es da noch Optimierungsmöglichkeiten?>Kenn ich und mich nervt das dann auch sehr ;)>Du kannst UseVerify=0 setzen.
Ja, du hast recht. Sieht so aus, das der "normale" flashvorgang reicht
um eine recht hohe Fhashwahrscheinlichkeit zu erreichen.
Das verkürzen des Boot sign von "BOOT" auf "BT" würde in meinem Fall
wirklich helfen, wow. :) Wenn dieses keine weiteren Auswirkungen hat,
würde ich jetzt einfach mal dauerhaft bei mir so einstellen.
>>b) eine Fortschrittsanzeige beim flashen wäre nett. Es wird zwar>>"working" angezeigt und er hat 16kb in 2,2sek reingeflashed, aber wenn>>ein Laufbalken keine Mühe machen würde, wäre das klasse.>Nicht so einfach möglich, auf Grund des Datenkonzeptes schon.
Das ist absolut kein Thema. Sowas ist auch wirklich nur "nice to have".
Es gibt ja ein feedback im Protocol was einem anzeigt ob alles geklappt
hat.
>>Auch ist unter "EEPROM Content" der "write>>to devive" Button dekativiert, wenn ich ein externes *.eep file geladen>>habe.>Hm geht schon nur gewusst wie ;) Ich habe diesen "Fehler" aber in obiger>Version beseitigt. Normalerweise ist es nämlich so das du im HEX Editor>Daten veränderst. Diese werden rot markiert dargestellt.
ja, ich habe mittlerweile auch rausgefunden, wie man den Editor richtig
bedient. :) trotzdem sehr hilfreich das man jetzt ohne Änderung des
Inhaltes sofort die EEPROM Inhalt schreiebn kann. Sowas brauche ich
recht regelmäßig da ich ein Parameterimage im EEPROm ablege.
vielen Dank und ich hoffe das dies auch anderen Leuten geholfen hat.
cu
chris
>Das verkürzen des Boot sign von "BOOT" auf "BT" würde in meinem Fall>wirklich helfen, wow. :)
Kürzer geht halt nicht mehr, es sollten also mindestens 2 Zeichen sein
und der komplette String sollte eine gerade Anzahl an Zeichen haben.
Dieser String dient einerseits als Identifier/Passwort, andererseits
auch zum "Testen" der Verbindung. Wenn es also möglich ist sollte der
String schon länger sein da so Übertragungsfehler auf Grund einer leicht
daneben liegenden Auto-Baudrate besser erkannt werden.
>Durch Erhöhung des Wertes auf 50 funktioniert es gut. Es gibt keine>Fehlermeldung mehr. Allerdings auch genau ab 50, Werte <50 resultieren>im oben genannten Fehler. Dies habe ich bis max. Baudrate getestet.
Das deutet auf schon oben genanntes Verhalten der verschiedenen
RS232-USB-Treiber hin. Normalerweise benötigt der AVR maximal 10 Takte
bis er anfängt die ersten Datenbytes aus dem EEPROM an den PC zu senden.
Also niemals 50ms an Zeit. Der Timeout entsteht beim ersten zu
empfangenden Datenbyte beim Auslesen des EEPROMs, gleich nach dem Senden
der 2 Kommandobytes + 2 Bytes CRC. Sowas kann nur passieren weil der
USB-RS232-Treiber oder das USB-Hardware-Protokoll Zeitverzögerungen
einbaut.
Du solltest also in deinem Falle den Timeout "Base" immer auf minimal
50ms stehen lassen, denn bei deiner Hardware/Treiber kommen quasi 50 +
1000000/Baudrate * Datenbytes Zeitverzögerung raus. Rechnet man das
Verhältnis aus so sieht man das dise 50ms weit über der Zeit liegen die
man für ganze Datenpackete ansich benötigen würde. Deshalb nutz ich die
gute alte UART meines Laptops ;)
Eventuell müsstest du auch "Buffer" auf 50ms setzen, aber das erhöht
drastisch die Programmierzeiten !
Vielleicht findest du ja einen Dreh wie man den USB-RS232-Treiber dazu
überedet mit kürzeren Zeitverzögerungen zu arbeiten.
Ich arbeite zZ. mit
Base=25
Erase=5
Flash=10
Eeprom=10
Buffer=1
und normaler UART bei 115200 Baud ohne Probleme.
Gruß hagen
Hier die neuste Version, geändert wurden:
- Anleitung zur Benutzung der Verschlüsselung und der prekompilierten
ACY- Dateien beigefügt
- Wenn AVRootloader.exe eine Verbindung herstellen möchte so zieht er
den DTR-Pin der RS232 auf High-Pegel. Damit kann man über DTR eine
Stromversorgung zb. eines Treibers machen, aber bitte RS232
Spezifikationen beachten
- unter Win2k/Win95 wurde das Fenster der AVRootloade.exe nicht in den
Vordergund geholt. Stattdessen blinkte nur das Icon in der Tastleiste.
Dieses Problem wurde behoben (ist aber auch Standardverhalten auf diesen
Windowsversionen)
- Darstellungsprobleme im SRAM-Content HEX-Editor beseitigt
- mit rechten Mausklick in diese HEX-Editoren öffnet sich ein Popup-Menu
mit dem man zb. selektierte Zellen im Editor rot markieren kann. Beim
Zurückschreiben in den AVR oder beim Speichern in eine Datei werden dann
nur diese selektierten Zellen berücksichtigt. Mit diesem Feature kann
man zb. selektive EEPROM Dateien erzeugen die nur ausgeählte
Speicheraddressen schreiben.
- die AVR Device Liste in AVRootloader.asm (.includes) wurde auf den
neusten Stand gebracht
- die Datei AVRootloader.dev wurde ebenfalls auf den neusten Stand
gebracht, möchte man diese neu erzeugen lassen so muß AVRStudio im
System korrekt installiert sein. Löscht die aktuelle AVRootloader.dev
Datei und startet die Anwendung. Aus den XML Part Description Files des
AVR Studios wird dann eine neue AVRootloader.dev erzeugt.
- Howto für selektive EEPROM Updates hinzugefügt
Gruß Hagen
Leider war noch ein Fehler drinnen, ich hasse das wenn man unter
Zeitdruck arbeitet.
Die Funktion "make Password" veränderte die Formatierung des Passwortes
in der AVRootloader.asm und in der AVRootloader.ini falsch. Jetzt ist's
richtig ;)
Danke an Wolfgang der mich darauf aufmerksam gemacht hat.
Gruß Hagen
@Hagen
Mal 'ne einfache Frage, ich überlege schon seit Tagen, wofür man einen
Bootloader mit Verschlüsselung benötigt. Wer soll da wo Daten klauen und
vor allem wie?
Wäre froh, wenn Du mir das erklärst, damit ich wieder schlafen kann ;-)
@ Neugieriger
Z.Bsp. wenn du mehrere Geraete im Umlauf hast und bei einer
Programaenderung nicht selbst von Standort zu Standort wandern und diese
updaten willst.
@Hagen Re
Danke für Dein Programm. Werde es in meiner naechsten grösseren Serie
mal einsetzen.
Ja ich weiß.
Ich habe aber eine Anwendung wo ich bis zu 10 Controller parallel
betreiben will. Diese laufen alle mit der gleichen software. Ist nur
blöd immer jeden einzeln zu programmieren. Vielleicht hat jemand ja eine
Idee.
Möglich ist sowas aber nicht mit dem Bootloader wie er jetzt ist,
vielleicht sogar ja doch. Wenn alle AVR Bootloader als BootSign: einen
anderen Wert hätten, zb. AVR1 hat "BOOT1" AVR2 hat "BOOT2" usw. Alle
liegen sie per 1-Wire auf dem gleichen Bus und die 1-Wire-RS232 wäre der
Master. Dann könnte eine Point-to-Point Kommunikation von mehreren
Geräten quasi im Halb-Duplex funktionieren, eben so wie auf einem
1-Wire-Bus. Die PC-Software müsste dann nacheinander erst die Signatur
"BOOT1" senden und warten bis sich der entsprechende AVR meldet. Dann
wird dieser Programmiert, danach sendet der PC nun "BOOT2" und verbindet
mit AVR2 usw. usw.
Gruß Hagen
Ich hatte an etwas ähnliches gedacht.
Komfortabler wäre es doch wenn mann in der Windows Software die Anzahl
der Controller angeben könnte, damit die Windows Software dann je nach
Anzahl der Controller, nacheinander die Abfrage tätigt (also z.B.
BOOT1,BOOT2..) Alle Controller lauschen auf der RX Leitung und
aktivieren den TX Zweig zum Antworten nur wenn sie gefragt werden.
Danach deaktivieren sie diesen wieder. Wenn die Windows Software alle
Antworten gesammelt hat kann die Programmierung ja parallel laufen. Oder
ist solches nicht möglich?
Damit müssen doch die Bootloader wieder unterschiedlich sein. Im
zweifelsfall reicht es ja vielleicht unterschiedliche Passwörter zu
nehmen. Es reagiert dann jeweils nur der Controller, wo das Passwort
passt.
Hardwaremäßig ist es am einfachsten im 1-Wire-Modus zu arbeiten, das
geht ohne Umprogrammierung der Software (AVR-Bootloader) jetzt schon.
Das BootSign: aktuell der Wert "BOOT" ist das was du unter Passwort
verstehst. Das lässt sich in der PC-Software in AVRootloader.ini jetzt
schon ändern.
Man müsste die PC-Software so umprogrammmieren das sie diesen Wert
autom. inkrementiert.
Allerdings ist es schon richtig das man bei diesem Verfahren die
AVRootloader.asm individuell programmieren müsste.
Vorstellbar wäre es diese Software so zu erweitern das eine Serialnummer
im EEPROM abgelegt wird. Am Anfang installiert man auf den AVR diese
Software und programmiert diese Serialnummer individuell, also immer nur
ein AVR an der 1-Wire Hardware angeschlossen. Nach diesem Setup kann man
alle AVRs parallel am 1-Wire hängen. Die PC Software fragt nun wie beim
Original-1-Wire diese Serialnummer=ID ab und ermittelt auf diese Weise
alle AVRs die am 1-Wire-Bus hängen. Danach kann man per PC-Software
selektiv all Geräte flashen oder eben eine Auswahl oder alle in einem
Rutsch sequientiell nacheinander.
Gruß Hagen
Wenn man sich die Anforderung von James ansieht und daraus ableitet,
welcher Aufwand schon beim Programmieren der einzelnen Bootloader zu
betreiben wäre, oder den Aufwand, der seitens Hagen notwendig wäre, dann
würde ich mal ein back-to-the-roots anregen.
Warum nicht einfach ein Lötpad in der Nähe eines jeden Controllers und
diesen mal kurz mit einer Prüfspitze berühren. Parallel dazu einen
Taster, der die Betriebsspannung aus-einschaltet und fertig, oder
einfach den Pin vom Controller aus überwachen, so wie Hagen es oben
dargestellt hat.
Das geht doch ratz-fatz...
Ich fände es gut, wenn die Windowssoftware noch ein "simples" Terminal
Program mitbringen würde. Da ich über dieselbe serielle Schnittstelle
programiere wie die, auf der ich Statusmeldungen ausgebe fände ich es
gut, wenn das in einer Software wäre.
Was hälst du davon?
Werner
Hatte ich auch schon dran gedacht aber es stellt sich die entscheidende
Frage wie solls gehen ? Der Bootloader sollte primär vollkomman
unabhängig zur eigentlichen Anwendungssofwtare sein. Die PC-Software
wäre demnach eine Kombination aus Bootloader-Software für den
AVR-Bootloader und Terminal-Software für die Anwendung. Soweit
unproblematisch wenn dieses Terminal vollkommen separat funktioniert.
Dh. also eigener Verbindungsaufbau usw. da ja nicht mit dem Bootloader
connected wird sondern mit der installierten Anwendung. Die Anwendung im
AVR muß also selber die UART Kommunikation machen unabhängig vom
Bootloader.
Dazu hatte ich angedacht eine 1-Wire Bibliothek die per Interrupts
arbeitet vorzusehen die man dann in die eigene Anwendung einbinden
könnte. Nur die liebe Zeit ist das Problem. Ich programmiere in meiner
Freizeit nur Dinge die ich auch selber benötige, verständlich oder ?
Wenn also irgendeiner eine solch fertige Library mir anbietet dann bin
ich gerne bereit meine PC-Software dahingehend anzupassen. Das ist im
Grunde kein großer Aufwand.
Ich habe mir auch schon AVR309 (IgorPlug-USB) angeschaut und als
untauglich verworfen da dort keine Kommunikationstimeouts unterstützt
werden die aber für das Bootloaderprotokoll essentiell sind.
>Da ich über dieselbe serielle Schnittstelle>programiere wie die, auf der ich Statusmeldungen ausgebe fände ich es>gut, wenn das in einer Software wäre.
Siehst du, Du machst es so. Ich zb. habe am gleichen 1-Wire-Pin
normalerweise eine LED, also Ausgang dran, im aktuellen Projekt.
Wenn sich bei mir also der Bedarf nach so einer Schnittstelle andeutet
würde ich das auch in die gleiche PC-Software integrieren, logisch.
Gruß Hagen
Ich arbeite mit den "normalen" Uart-Routinen aus meinem Hauptprogramm.
Da ich "genügend" I/O habe benutze ich auch den 2-Draht Modus.
Aber schön zu hören, dass das vielleicht noch kommt ;-)
Wenn ich das richtig verstanden habe, ist der normale Ablauf doch wie
folgt
- PC Software starten
- Connect to device
- AVR einschalten bzw. resetten
- PC Software connected
- danach kann ich programmieren
Manchmal habe ich nun, dass die PC Software zwar in den connected Modus
wechselt, aber die alte Anwendung auf dem AVR trotzdem gestartet wird.
Dann kann ich natürlich nicht programmieren.
Würde es hierbei etwas bringen, die Wartezeit des Bootloader
hochzusetzten, oder was läuft hier schief?
Werner
Ja, Wartezeit hochsetzen. Die PC-Software sendet beim Connect (egal ob
manuell mit Connect-Button ausgelösst oder durch Button
"Program"/"Erase" etc.pp. automatisch ausgelösst) permanent ein
#0#0#0#0#13BOOT. #0#0#0#0 steht für Kommando "Restart Bootloader", #13
ist das Zeichen für die AutoBaud Funktion und "BOOT" das Passwort/die
Signature. Das Interval dieses Packetes definiert sich über die
Baudrate, je höher die Baudrate desto höher kann das
Wiederholungsinterval werden. Der AVR-Bootloader versucht nun innerhalb
von zb. 300ms (default und fix) darauf zu reagieren. Nun kann es
vorkommen das das Timing so ungünstig ist das sich diese Intervalle auf
eine Art überschneiden das keinerlei Connect möglich ist. Dann einfach
nochmal RESET/POWER OFF drücken. Oder aber in der Applikation so wie
oben schon angedeutet auf Pegelwechsel am RX-PIN reagieren. Dann würde
die Applikation solange in den Bootloader springen bis die PC-Software
aufhört irgendwas zu senden. In diesem Falle kann man das BootDelay im
AVR-Bootloader als defakto deaktiviert ansehen und die PC-Software
steuert den AVR fern.
Alternativ könnte ich das BootDelay so abändern das nicht exakt x
Milliskunden im Gesamten gewartet wird, also fester Timeout, sondern das
wenn nach x Millisekunden rein garnichts passiert ist ein Timeout
entsteht. D.h. würde das BootDelay zb. auf 300ms stehen und nach 200ms
kommt irgendein Impuls auf Rx rein so verlängert sich das Delay um
weitere 300ms. Somit würde der Bootloader solange im Delay bleiben bis
entweder eine gültige Verbindung zustande kam (Bootloader startet) oder
aber die PC-Software für mindestens 300ms Ruhe gibt (Applikation
startet). Ist also keine PC-Software aktiv so startet die Applikation
nach 300ms, ist eine PC-Software aktiv so läuft der Connect-Prozess so
lange bis die PC-Software "aufgibt" und 300ms später startet die
Applikation, oder es aber zu einer gültigen Verbindung kommt (nochmal in
anderen Worten;).
Solche Probleme lassen sich nur dann umgehen wenn man zusätzliche
Steuerleitungen mit diesen Funktionen vorsieht. Eine Möglichkeit habe
ich jetzt schon integriert. Der DTR Ausgang der RS232 wird beim Beginn
eines Connects in der PC-Software auf HIGH-Peel gezogen (ist
normalerweise -12 bzw. -6 oder sogar 0 Volt, je nach RS232 Hardware).
Man könnte also den DTR über eine Shottky wie beim 1-Wire an einen Pin
des AVRs legen. DTR wird momentan so geschaltet damit man aus diesem Pin
quasi eine Spannungsversorgung eines Pegelwandlers (2x Transistor)
aufbauen kann.
Ich hatte auch schon vorgesehen das der RTS Pin ebenfalls kurzeitigt
seinen Pegel verändert, von HIGH auf LOW und wieder HIGH. Über eine
Shottky wie beim 1-Wire direkt an den RESET des AVRs. Die PC-Software
pulst diesen Pin nun vor jedem Connect-Versuch. Habe ich aber wieder
rausgenommen und kann wenn gewünscht wieder eingebaut werden.
Aber genau der Punkt das man auch nur mit wenigen Kabeln arbeiten kann
ist primäres Ziel gewesen bei diesem Bootloader ;)
Gruß Hagen
Hallo Hagen,
ich wollte jetzt mal auch Deine tollen Bootloader benutzen,
an einem ATMEGA162,
nachdem ich n halben Tag gesucht habe und endlich gefunden hab,
das ich ja n MAX232 davorgeschaltet habe und natürlich dann:
.equ UartInvert = 1
setzen muß, bin ich jetzt ein Stück weiter,
Aber leider funktioniert das Programmieren nicht:
18.04.08-18:02:02-958 > Switch to 2-Wire mode
18.04.08-18:02:03-083 > Device connected
18.04.08-18:02:04-833 > programming Device...
18.04.08-18:02:04-833 > execute compiled data
18.04.08-18:02:04-833 > selected options in compiled file:
18.04.08-18:02:04-833 > - programming FLASH
18.04.08-18:02:04-942 > CmdFlash.ResCheck() Error: Verify failed
Ich hab schon verschiedene Baudraten und Timeouts probiert, daran schein
es nicht zu liegen.
Hast Du evtl. n Tip ?
Die Idee mit dem Terminal ist mir auch gleich aufgefallen, ich hab hier
ZOC in Verwendung, und wenn das gestartet ist kommt die AVRootloader.exe
nicht mehr an die COM, also Programm beenden, AVRootloader.exe aufrufen,
programmieren, usw.,
Ne integrierte Lösung wär schon nicht schlecht,
muß ja kein ausgewachsenes Terminal sein, nur Ein- und Ausgaben.
Da ich meißtens ein CommandLineInterface in meine größeren AVRs
integriere wäre das echt hilfreich.
Danke und Grüße,
Micha
Hm, das sieht übel aus. Es bedeutet das dein AVR kaputt geflasht ist.
Mal davon abgesehen das auch ein Fehler im Bootloader voehanden sein
könnte ;)
Nach dem Programmieren einer FLASH Page wird der FLASH sofort wieder
ausgelesen und mit den soeben programmierten Daten im SRAM Buffer
verglichen. Sollte es dabei zu einer Inkonsistenz kommen wird der Fehler
"Verify failed" zurückgeliefert. Also schlägt bei dir das implizite
Verify zu und meint das dein FLASH nicht sauber programmiert werden
kann. Gehen wir davon aus das der Bootloader keinen Fehler macht, deine
Hardware ansonsten sauber ist (keine Spannungseinbrüche in der
Versorgung zb.) dann heist dies das dein AVR defekt ist.
Wenn du den ISP noch dran hast dann solltest du erstmal versuchen deinen
AVR damit zu flashen. Es sollte dann ebenfalls ein Verify Fehler
auftreten. Dann wäre dein AVR FLASH definitiv kaputt. Am besten flasht
du alle Zellen einmal auf 0x00 und einmal auf 0xFF um sicher zu gehen.
Wenn kein Verify Fehler per ISP auftritt dann muß ein Fehler im
Bootloader vorliegen, kann aber beim besten Willen nicht sagen was dort
falsch sein sollte.
>Die Idee mit dem Terminal ist mir auch gleich aufgefallen, ich hab hier>ZOC in Verwendung, und wenn das gestartet ist kommt die AVRootloader.exe>nicht mehr an die COM, also Programm beenden, AVRootloader.exe aufrufen,>programmieren, usw.,
Ja ich weiß :) Ich hatte als ich began mit dem Bootloader schon die
gleiche Idee aber immer wieder verworfen. Es ist eben eine Bootlaoder
Software und keine Applikationsbezogene Software. Ich denke nochmal
drüber nach verspeche aber nichts, es stehen erstmal andere Änderungen
an.
1.) die Funktionalität des Bootloaders wird in ein Interface gepackt.
Die Funktionalität der Kommunikationsschnittstelle (bisher COM-Port) ist
schon längst in einem solchen Interface. Das Ganze kommt in eine DLL.
Nun kann man mit allen Standard-Programmiersprachen für Windows die
Interfaces, also COM, DCOM unterstützen auf diese Interfaces der DLL
zugreifen. Somit ist die komplette Bootloader Funktionalität auch aus
eigenen Programmen heraus nutzbar. Man kann so auf einfache Weise
entweder das Kommunikations-Interface durch ein egenes ersetzen, zb.
direkter USB Treiber, AVR309 wenn man möchte etc.pp. Oder man kann
eigene Befehle die man in den AVR-Bootloader integriert hat mit dem
Bootloader Interface erweitern.
2.) es wird eine PIN geben. In den ersten par EEPROM Zellen des AVRs
kann in Zukunft eine PIN programmiert werden. Der Bootloader bekommt ein
neues Kommando bei dem man diese PIN dem Bootloader mitteilen muß damit
er alle anderen Kommandos überhaupt akzeptiert. So kann man jeden AVR
individuell mit dieser PIN schützen. Kann sie nach Eingabe der PIN über
das EEPROM Kommando neu schreiben oder löschen. Statt PIN könnte man
sagen Serialnummer die als programmierbares Passwort benutzt wird.
Damit gibt es also insgesamt drei verschiedene Schutzmaßnahmen die der
Bootloader unterstützt. Das BootSign -> "BOOT" das als harcoded Passwort
für alle AVRs mit gleichem Bootloader dienen kann. Die PIN die im EEPROM
individuell für jeden AVR programmiert werden kann, zb. auch durch die
Endkunden. Und schlußendlich die Verschlüsselung samt 128 Bit Passwort
um Fernupdates gesichert durchführen zu können. Natürlich ist die
Unterstützung einer solchen PIN ebenfalls konfigurierbar.
3.) das Verfahren des Boot Timeouts wird leicht geändert.
4.) Vieleicht, aber nur vieleicht ! Ein Standalone Bootloader für den
PC. Mit der jetzigen PC Software würde man dann eine eigene EXE
kompilieren die die verschlüsselte ACY-Datei (HEX für FLASH/EEPROM)
enthält. Das GUI dieser Anwendung würde wie ein Setup-Assistent
aussehen, die automatische Ermittlung der Schnittstelle enthalten und
auch autom. die eingebundene ACY-Datei flashen.
Gruß Hagen
Hallo Hagen,
Danke für Deine schnelle und ausführliche Antwort,
da können wir ja noch einiges erwarten von Deinem Projekt, :-)
die Idee mit der DLL ist sehr gut, da ich nämlich hier schon ein
Sourceproject für ein Terminal-programm habe, allerdings in C,
aber vielleicht kann man dann beide irgendwie verheiraten, :-))
bzgl. meinem AVR, gottseidank hatte ich noch den ISP dran,
war ja noch am Bootloader-basteln,
also das Programmieren/Verify über ISP funktioniert stabil und
problemlos,
sowohl alles FFFF (kriegt man ja durch erase schnell hin :-)), als auch
alles 0000, oder die Applikation selbst, wie gesagt über ISP ist alles
ok.
still any ideas ?? :-))
Grüße,
Michae
Uff. Versorgt der ISP den AVR mit Spannung ? Das Problem was ich sehe
ist das die Routine die den FLASH programmiert ihre Daten aus dem SRAM
bekommt. Damit wird der Pagebuffer befüllt und anschließend der Program
Befehl ausgeführt. Danach lädt der AVR nochmal die soeben programmierten
Zellen aus dem FLASH und vergleicht sie mit den Daten im SRAM. Es gibt
also nur 4 Möglichkeiten wo ein Fehler passieren kann.
1.) FLASH Programmierung, dh. dein FLASH ist wirklich defekt oder kann
nicht sauber programmiert werden weil deine Spannungsversorgung schlecht
ist
2.) SRAM Daten verändern sich willkürlich zwischen der
FLASH-Programierphase und FLASH Verifyphase. Auch das könnte an einer
Spannungsversorgung liegen
3.) meine Software im AVR hat an dieser Stelle noch einen Bug. Das halte
ich aber für unwahrscheinlich, ich hatte bisher noch nie einen solchen
Verify Fehler selbst mit einem Projekt bei dem die Spannungsversorgung
sehr heikel ist (Solar-Panel -> 1.2V NiMH Akku -> Stepup auf 3.0 Volt).
4.) Datenübertragung, dh. alles läuft im AVR korrekt ab, am Ende wird
der Returncode SUCCESS gesendet aber als ERRORVERIFY empfangen. Das ist
aber enorm unwahrscheinlich da diese Fehlercodes sich im oberen Nibble
komplett unterscheiden -> $3x -> $Cx.
Wie gesagt bisher hatte ich bei meinen Projekten (ATtiny45, ATtiny461,
ATmega168) keinerlei Probleme.
Mache mal folgendes:
1.) AVRootloader.asm -> UseSRAM = 1, UseE2Read=1, UseE2Write=1 setzen,
neu compilieren und installieren, WICHTIG! vergiß nicht BootCodeSize=???
anzupassen so wie es in der Readme steht.
2.) AVRootloader.exe starten und über Button "Connect to device" eine
Verbindung herstellen
3.) auf Page "Device Information" überprüfen ob alle Angaben mit deinem
AVR übereinstimmen
4.) auf Page "SRAM Content" gehen und Button "Read from Device" drücken
5.) in dem grünen Bereich des HEX Editor gehen und rechten Mausklick
machen, im Popup "Clear Cells" drücken
6.) auf Button "Write to device" klicken
7.) auf Button "Read from device" klicken und schauen ob alle Zellen im
grünen Bereich weiterhin auf 0x00 stehen (bis auf die letzten par Bytes
-> Stack)
8.) nun alle Zellen im grünen Bereich auf 0xFF setzen und Steps 6.-7.
wiederholen
Du musst dann immer exakt das wieder aus dem SRAM auslesen was du vorher
dort hineingeschrieben hast. Sollte das nicht der Fall sein so hast du
ein Kommunikationsproblem, zb. mit dem MAX-Treiber.
Die gleichen Tests kannst du auch mit dem EEPROM machen -> Page "EEPROM
Content". Hier wird wie beim FLASH ebenfalls das implizite Verify
durchgeführt.
Gruß Hagen
>die Idee mit der DLL ist sehr gut, da ich nämlich hier schon ein>Sourceproject für ein Terminal-programm habe, allerdings in C,>aber vielleicht kann man dann beide irgendwie verheiraten, :-))
Ich möchte keine falschen Erwartungen wecken. zZ. verifiziere ich
erstmal ob mein angedachtes Konzept auch funktioniert. Ich werde mit
Interfaces arbeiten und das in deiner DLL. Alle Programmiersprachen die
Windows-COM-Interfaces unterstützen können dann darauf zugreifen (also
keine IDispatch-Interfaces!) Das unterscheidet sich zu einer normalen
DLL gewaltig da meine DLL quasi nur ein Objekt exportiert und keine
Funktionen. Jeder der sich mit Interfaces auskennt weiß welche Vorteile
das hat es bedeutet aber auch das diese DLL eher wie ein OCX/ActiveX
funktioniert statt wie eine normale DLL mit exportierten Funktionen.
Desweiteren könnte man diese Interfaces benutzen um auf die
COM-RS232-Schitstelle zu zugreifen um damit dann deine
Terminal-Geschichte zu machen. Das hat aber dann keinen Zusammenhang zum
eigentlichen Bootloader sondern bietet nur die Anbindung der RS232. Ich
sehe nämlich einen ziemlichen Aufwand in dem Punkt wie man Bootloader
uund Terminalclient in der eigenen Applikation miteineraner verbindet.
Der Bootloader arbeitet per Pollling in der Kommunikation und
unterdrückt jede asynchrone Verarbeitung per ISRs. Der Terminal Client
in der Applikation sollte so in keinem Falle arbeiten, dieser sollte
Interrrupt-gesteeurt funktionieren. Zusätzlich noch das problem das je
nach Kommunikationshardware, also 1-Wire/2-Wire/invertiert/nicht
invertiert, müsste der Terminalclient in der Applikation alle diese
Modis auch unterstützen. Es macht ja keinen Sinn wenn der Bootloader im
1-Wire läuft und das Terminal nur im invertierten 2-Wire Modus
funktioniert.
Ich bin eventl. gerne bereit einen kleinen Terminal-Srver in der
PC-Software zu integrierten die aufbauend auf den aktuellen
Verbindungsparametern die der Bootloader zuvor ausgehandelt hat sich mit
dem AVR nach dem Start der Applikation weiterhin zu verbinden, bzw.
verbunden zuz bleiben. D.h. man verbindet erstmal zum Bootloader (zwecks
AutoBaud, Autodetektion 1-Wire/2-Wire). Man bleibt verbunden wechselt zu
terminal Page und Startet die Applikation im AVR. Diese Applikation
müsste sich die Baudrate etc.pp. aus den internen Registern des AVRs
holen und ihrerseits eine Terminalkommunikationssoftware initialisieren.
Bisdahin aber nicht weiter. Dh. die UART-Kommunikation in der eigenen
Awnedung um den terminalclient zu implementieren wäre nicht meine
Aufgabe.
Gruß Hagen
Hallo Hagen,
der AVR wird nicht vom ISP versorgt, sondern von einem 7805 gespeist,
das "self-made" Board habe ich schon Jahre im Einsatz, eigentlich nie
irgendwelche Ungereimtheiten bzgl. Spannung gehabt.
Allerdings hängt dort am exterenen Memoryinterface des AVRs ein
Parallel-Flash für Datenspeicherung.
Das sollte aber eigentlich kein Problem sein, so lange das SRE-Bit nicht
gesetzt ist.
Das mit dem SRAM würd ich ja gern probieren, da schein aber noch ein
Problem mit dem PC-Programm zu sein, die Buttons "Read from device" usw.
sind nicht im sichtbarem Bereich, auch wenn ich das Programmfenster
maximiert habe,
ebenfalls sind im Hauptfenster die Browserknöpfe verschwunden, egal wie
groß ich die Fenster mache. (siehe angehängte Bilder)
Sieht nach einem Fontgröße-/art-Problem aus, ich schätze mal das
PC-Programm setzt keine Fonts selber sodaß die "default" Systemfonts
genommen werden,
und die sind von PC zu PC verschieden.
Bei meinem PC auf Arbeit waren alle Buttons zu sehen, wie gewünscht,
beim PC hier zuhause, wie gesagt, komm ich an einige Buttons nicht ran.
bzgl. Terminal, der letzte Abschnitt von Deiner vorherigen Mail bringt
mich auf einen Gedanken:
Wie wäre es wenn dein PC Programm eine virtuelle COM anbietet, damit
kann dann JEDES Terminalprogramm benutzt werden.
die COM-Parameter werden vom PC Programm einfach übernommen, und es
werden die Zeichen, die nichts mit der Bootloader-Kommunikation zu tun
haben, einfach durchgereicht. Allerdings weiß ich nicht wie es
programm-technisch schwierig ist eine virtuelle COM zu implementieren.
Also du hast ja Probleme ;)
Erstmal müssen wir die PC-Software bei dir richtig zum laufen bringen.
Welches Betriebsystem hast du ? Welche Einstellungen hast du bei der
Darstellung, Fonts, Scalierung etc.pp. ? Du bist der Erste der solche
Probleme hat.
Ich habe das Program mit Delphi 5 programmiert und verlasse mich darauf
das Delphis VCL da alles richtig macht, sprich Ausrichtung der Controls
usw. Das es damit Probleme geben soll ist mir neu, immerhin arbeite ich
damit professionell seit dem es Delphi auf dem Markt gibt.
Schick mir doch mal ne PN so das du mir per EMail noch mehr Screenshots
schicken kannst. Du must da auch nicht auf die Bildgröße achten, mein
Postfach ist ziemlich groß.
Also ich habe das bei mir mal versucht zu reproduzieren, Systemfonts,
Scrollbars, Bildschirmscalierung etc.pp. verändert, bekomme es aber nie
hin das so ein Fehler auftritt wie der bei dir.
Probiere doch mal die EXE aus dem Attachment. Ich habe den Font, den
BIDI-Mode und die Autoscalierung und einige andere Werte geändert. Denke
zwar nicht das das hilft aber probieren können wir es ja mal.
Ich bräuchte also als erstes von dir noch mehr Infos über dein System.
>Das mit dem SRAM würd ich ja gern probieren, da schein aber noch ein>Problem mit dem PC-Programm zu sein, die Buttons "Read from device" usw.
Falls es mit der geänderten Version geht dann probiere das mit dem SRAM
und EEPROM aus, damit wir wissen ob es an der Kommunikation liegt.
>bzgl. Terminal, der letzte Abschnitt von Deiner vorherigen Mail bringt>mich auf einen Gedanken:>Wie wäre es wenn dein PC Programm eine virtuelle COM anbietet, damit>kann dann JEDES Terminalprogramm benutzt werden.>die COM-Parameter werden vom PC Programm einfach übernommen, und es>werden die Zeichen, die nichts mit der Bootloader-Kommunikation zu tun>haben, einfach durchgereicht. Allerdings weiß ich nicht wie es>programm-technisch schwierig ist eine virtuelle COM zu implementieren.
Ich soll einen Windows Kernelmode Treiber mal eben programmieren ?
Vergiß es ganz schnell, den Streß will ich nicht nochmal haben.
Es ist ja kein Problem für mich, aufsetztend auf die schon bestehende
COM-Verbindung ein Terminal laufen zu lassen, das ist das geringste
Problem. Das was die Sache so zeitaufwendig macht ist die nötige
Bibliothek die wir auf AVR Seite benötigen um sie in die eigene
AVR-Applikation einbinden zu können. Und exakt diese Bibliothek werde
ich in nächster Zeit nicht programmieren.
In der PC-Software wäre das ein Kinderspiel, einfach Verbindung zum
Bootloader, Run-Kommando senden das die Applikation durch den Bootloader
im AVR gesteartet wird und dann übernimmt die Terminalbibliothek die
Kontrolle über die RS232. Nur, damit ich die PC-Software dann ordentlich
testen kann müsste ich für den AVR eben auch diese Bibliothek
programmieren und das mache ich jetzt nicht. Und sowas blind, ohne reale
Tests zu programmieren, um dann einen erhöhten Support zu haben, weil
Nichts ohne Test sofort in der Praxis laufen kann, mache ich ebenfalls
nicht. Es ist Hobby und ich muß mir ganz genau überlegen welches meiner
Projekte, von den vielen, ich mal endlich fertig bekommen will. Dazu
gehört dieses Terminal eben nicht, weil ich es nicht brauche. Denke das
das wohl nachvollziehbar ist, oder ?
Schick mir ne PN, und wir können dann eine Zusammenarbeit anstreben.
Wenn du die Tests und die Terminalbibliothek für den AVR übernimmst,
baue ich die entsprechende Funktionalität in die PC-Software sofort ein.
Gruß Hagen
Hallo Hagen,
nur ganz schnell bevor ich ins Bett gehe,
das angehängte PC Programm funktioniert, alle Buttons sind sichtbar,
so wie auch auf meinem Arbeits-PC,
ich hab hier das normale Windows XP mit Sp2 zum Laufen, also nichts
exotisches,
alles weitere per PN
Grüße,
Micha
SMTP error from remote mailer after RCPT TO:.....:
host mx0.gmx.net [213.165.64.100]: 550 5.1.1 ... User is unknown
{mx094}
Du musst mir schon deine richtige EMail Addresse geben. Oder melde dich
hier im Forum als registrierter Benutzer an, dann geht das auch per PN
indem du meinen Namen anklickst (ist dann blau)
>ich hab hier das normale Windows XP mit Sp2 zum Laufen, also nichts...
ich entwickle die PC-Software auch auf diesem System, und läuft. Du
musst also irgendwas anders eingestellt haben.
Gruß Hagen
Für alle die es interessiert. Das Problem vom Micha konnte eingegrenzt
werden.
Der ATmega162 kann im Kompatibilitätsmodus als ATmega161 laufen. Meine
PC-Software ermittelt alle nötigen Parameter wie FLASH/EEPROM/SRAM
Position/Größe aus den ATMEL Part Decsrption XMLs die beim AVR Studio
enthalten sind. In diesen XMLs ist der ATmega161comp unvollständig bzw.
fehlerhaft beschrieben, es fehlen die Infos für die BootPages.
Desweiteren benutzt mein Bootloader aus Effizienzgründen eine spezielle
Berechnung der Signatur der AVRs. Diese Berechnung reduziert die 3 Bytes
Signatur auf eine 1 Bytes Signatur. Das funktioniert auch wunderbar bis
eben auf den Punkt ATmega161. Dessen Signatur überschneidet sich dann
mit der Signatur des neueren ATtiny88.
31=1E9311, ATtiny88 , 8192, 64, 512, 256, 64, 0, 0, 0, 0
31=1E9401, ATmega161 , 16384, 512, 1024, 96, 128, 8, 0, 0, 0
31=1E9401, ATmega161comp, 16384, 512, 1024, 96, 128, 0, 0, 0, 0
34=1E9404, ATmega162 , 16384, 512, 1024, 256, 128, 2, 4, 8, 16
Losung dieser Probleme mit der aktuellen Version sieht so aus:
1.) .DEV Datei so abändern
31=1E9311, ATtiny88 , 8192, 64, 512, 256, 64, 0, 0, 0, 0
3E=1E9401, ATmega161 , 16384, 512, 1024, 96, 128, 8, 0, 0, 0
3F=1E9401, ATmega161comp, 16384, 512, 1024, 96, 128, 2, 4, 8, 16
34=1E9404, ATmega162 , 16384, 512, 1024, 256, 128, 2, 4, 8, 16
also aus 31 wird 3E/3F beim ATmega161/comp, beim ATmega161comp müssen
die letzten 4 Zahlen synchron wie beim ATMega162 geändert werden
2.) in AVRootloader.inc
.set SIGNATURE_CRC = (SIGNATURE_000 << 3) + (SIGNATURE_001 << 4) +
SIGNATURE_002
ersetzen mit
.set SIGNATURE_CRC = 0x3E oder 0x3F je nachdem ob man ATmega161 oder
ATmega161comp benutzt wird
3.) in AVRootloader.asm muß beim ATmega162 im Kompatibilitätsmodus
.include "m161def.inc" ; ATmega161
Inkludiert werden, nicht m162def.inc !!
Da dieses Problem nur mit dem ATMega162/161comp. auftritt wird es
erstmal keinen HotFix geben, das Teil ist eh abgekündigt.
Gruß Hagen
Version 2.0
Die SIGNATURE_CRC wurde entfernt. Der neue ATtiny88 überschneidet sich
mit dem ATmega161 beim Verfahren der Version 1.0. Nötige Änderung dafür
ist in AVRootloader.asm -> BootSign: die 4 Bytes. Die PC-Software kann
aber weiterhin mit der Version 1.0 benutzt werden, ist also
abwärtskompatibel.
AVRootloader.dev aktualisert auf die neusten AVRs und beim ATMega161/
ATmega161comp. (ATmega162 im 161 Kompatibilitätsmodus) Fehler aus den
AVR Studio XML Dateien beseitigt. ATMEL hat dort falsche Angaben
gemacht.
Die PC-Software ist intern komplett neu geschrieben worden. Wer
Interesse hat kann die AVRootloader.DLL benutzen um die komplette
Funktionalität der PC-Software (ohne GUI) in seine eigene Anwendung zu
integrieren. Diese DLL implementiert die Funktionalität über Interfaces,
sollte also auch über andere Programmiersprachen nutzbar sein. Delphi
Header in AVRootIntf.pas. Über diese Schnittstelle kann man auch eigene
Communications-Interfaces vorgeben über die dann die AVRootloader
Schnittstelle kommuniziert, zb. AVR309 USB oä.
Über AVRootloader.ini in Section [Timeouts] RTSPulse=? kann man das
Verhalten beim Verbindungsaufbau der PC-Software von der RTS-Leitung der
RS232 einstellen. Man kann über diese Option also den RTS PIN der RS232
zb. für x Millisekunden von HIGH auf LOW und wieder HIGH ziehen. Damit
könnte man, über Serienwiderstand und Shottky Diode den RTS Pin auf den
RESET Pin des AVRs klemmen. Bei jedem Verbindungsaufbau der PC-Software
zum Bootloader wird somit autom. der AVR in den Reset versetzt.
Wer möchte kann ein Copyright String oä. in AVRootloader.asm einbauen.
Dieser String wird dann in der PC-Software in der Device Information
angezeigt.
Das geht so:
BootSign: .db "BOOT"
BootInfo: .db SIGNATURE_001, SIGNATURE_002, BootVersion, BootPages
BootMsg: .db SUCCESS, "Hello World"
BootEnd:
Wichtig ist das das erste Byte immer SUCCESS ist.
Das Timeout-Handling in der Baudratedetektion wurde geändert. Sollte
innerhalb des Timeouts, zb. 250ms, eine gültige Baudrate detektiert
worden sein so verlängert sich der Timeout ab diesem Moment um weitere
250ms. Entweder der Bootloader empfängt das korrekte BootSign: (zb.
BOOT) und springt in den Kommandomodus oder aber die Baudrate-Detektion
startet erneut mit weiteren 250ms. Wenn also Ruhe auf der RX-Leitung
ist, so startet die Applikation wie gewohnt nach dem Timeout. Wenn aber
eine PC-Software versucht eine Verbindung aufzubauen so bleibt der
Bootloader solange in der Baudrate-Detektion bis die PC-Software aufhört
eine Verbindung aufzubauen. Diese Vorgehensweise macht das Verfahren
wesentlich robuster. In Version 1.0 war der Timeout ein Gesamt-Timeout
des Verbindungsversuches. Nach den zb. 250ms wurde immer die Applikation
gestartet, egal ob eine PC-Software einen Verbindungsaufbau versuchte
oder nicht.
Gruß Hagen
Nochmal zurück zu Michaels Problem mit dem ATMega162 im ATMega161
Kompatibiliätsmodus.
Zuerst zur Lösung des Problemes:
1.) in AVRootloader.asm
.include "m161def.inc" ; ATmega161
.equ RWWSRE = 4 ; activate for ATmega162 in ATmega161 compatibility
mode
einfügen. Wichtig ist das das RWWSRE Bit manuell nachträglich deklariert
werden muß.
2.) in AVR-Studio Fuses
M161C=Häckchen
BOOTSZ=Boot Flash size=512 words start address=$1E00
BOOTRST=Häckchen
3.) AVR-Studio Lockbits
BLB0 und BLB1 nicht setzen.
Erklärung:
Der ATMega161 kennt das "Read While Write" Feature des SPM Befehles
nicht. Der ATMega162 kennt diese Feature aber. Lässt man den ATMega162
im Kompatibilitätsmodus arbeiten als 161'er dann muß man nach dem
Programmieren einer FLASH Page denoch diese Page wieder für den
Lesezugriff freischalten. Da aber in m161def.inc das nötige RWWSRE Bit
nicht deklariert ist wurde also die geschriebene FLASH Page nicht zum
Lesen freigeschaltet. Das anschließende Verify musste somit scheitern.
Zum Glück betrifft die nur das Sorgenkind ATMega161 bzw. den
Kompatibilitäsmodus des ATMega162. Die PC-Software erkennt nun korrekt
einen ATmega161. Die Problematik entstand weil der ATMega162 im m161
Modus das Extended IO ausblendet und somit die SRAM Startaddresse von
0x0100 auf 0x0060 vorverlagert und einiges der Peripherie deaktiviert.
Man kann also nicht den Bootloader so compilieren das er als ATmega162
läuft und die Fuse des M161C Modus setzen. Man muß den Bootloaer auf dem
M162 wirklich als M161 compilieren, aber dann unterscheiden sich die
Programmierbefehle (SPM) trotzdem. Kurz gesagt: der ATMega162 im M161C
Modus ist nicht vollständig kompatibel zum ATMega161, der SPM Befehl
funktioniert dann weiterhin wie bei einem ATmega162.
Gruß Hagen
Es tut mir ja leid, aber ein neues Update. Mit bestimmten HEX Files, bei
denen die Speicherblöcke nicht linear aufsteigend in ihrer Addresse
vorlagen, kam es zu Fehlern. Die PC-Software hat also HEX Files falsch
interpretiert. Unter normalen Umständen dürfte das aber kein Problem
sein da die meisten Tools wie WinAVR GCC oder AVR Studio solche HEX
Files immer mit linear nachfolgenden Addressen erzeugen.
Mit der neuen Version ist das natürlich gefixt.
Gruß Hagen
Hallo,
hast Du zufällig irgendwo eine Anleitung wie man den Loader in seine
eigene Delphi-app einbauen kann?
Ich komme da nicht recht weiter, würde gerne einen "One-Button" upload
von meiner Software aus einbauen, Comport ist da schon bekannt.
Ich müsste also nur dem Loader den Comport übergeben und eine Datei zum
flashen. Irgendwelche Tipps?
Louis
Ja, das geht. Der Bootloader relevante Teil befindet sich auch in der
AVRootloader.dll. Du kannst diese DLL in deine Delphi Anwendung
einbinden, das sähe so aus wie im Attachment gezeigt.
Als erstes entpackst du diese ZIP zb. nach c:\programme\atmel\ mit
Ordnern. Dann startest du Delphi und öffnest das Project1.dpr im Pfad
..\AVRootlaoder\Test DLL\. Darin zeige ich wie man die AVRootloader.dll
über die Unit AVRootIntf.pas benutzen könnte. Ist alles auf ein Minimum
reduziert damit man die Funktionweise besser sehen kann. Im Grunde für
ein bischen erfahrenen Laien echt einfach.
Du benötigst später deine EXE, die AVRootloader.dll, AVRootloader.dev
und die von dir compilierte *.ACY Datei zu deiner *.HEX und *.EEP Datei.
Eine ACY Datei enthält das HEX für den FLASH (Programm) wie auch die
EEPROM Daten aus der *.EEP Datei wenn man das möchte. Die Daten im ACY
sind natürlich mit dem Paswort und XTEA verschlüselt. Im DEMO prjekt
kannst du solch eine ACY Datei ezeugen lassen und sie dann
Programmieren.
Die AVRootloade.asm habe ich so angepasst das sie für einen ATmega162 im
1-Wire-RS232 mit sicherer Verschlüsselung arbeitet. Das musst du an
deine Bedürfnisse anpassen, steht aber in der Readme drinnen wie und
was. Das Test.hex das ich mitliefere ist für einen ATmega162.
Ich würde das DEMO an deiner Stelle also soweit reduzieren das man nur
noch den "Program" Button hat. Eventuell sogar ganz ranehmen und die
Aktion gleich nach dem Start der Anwendung ausführen. Mit der normale
PC-Bootloader-Software im Ordner \AVRootloader\Windows\ kannst du nun
deine *.ACY Dateien verschlüsselt erzeugen und sie dann mit deinem
Program in den AVRladen lassen. Also alles wie die Buttons "Connect",
"Erase", "Compile" raus. Die Methoden .GetACYFileName und
.GetEEPROMFileName liefern immer '' zurück. Nur die Methode
.GetFLASHFileName gibt den Namen deiner *.ACY Datei zurück.
Minimalistisch sähe es so aus:
Im Attachment mal das Test project für den ATmega162 das ich benutze.
8Mhz interner Takt, an PD0 der 1-Wire-RS232 RX, wenn man 2-Wire testen
möchte dann an PD1 der TX Pin und an PD3 eine LED mit Vorwiderstand nach
VCC.
Vergiß niemals die Lockbits entsprechend zu setzen. Also nach dem Upload
der Bootloader Software die Lockbits so setzen das ein Auslesen des AVRs
nicht mehr möglich ist. Ansonsten hat das alles ja keinen Nutzen ;)
Gruß Hagen
Naja andererseits kannst du dir auch die Arbeit sparen und meine fertige
PC-Software benutzen, rufe sie in deinem Falle mit folgenden Parametern
auf
AVRootloader.exe -PCOM2 -B112500 -Dc:\pfad_zu_deinen_ACY_files\
-Ftest.acy -Apc
Damit startest du meine PC-Software, diese versucht eine Verbindung über
COM2 mit 112500 Baud und flasht Test.ACY das im Pfad
c:\pfad_zu_deinen_ACY_files\ liegt und schließt die PC-Software nach
erfolgereicher Aktion wieder automatisch -> Parameter -Apc.
Die Erklärung dieser Kommandozeilenparameter findest du in
AVRootloader.txt.
Möchtest du eine unverschlüsselte HEX/EEP Datei auf diese Weise in einen
AVR uploaden der nur mit verschlüsselten Daten arbeitet dann füge den
Parameter -K5441C8CA4DDF8EEA19AAAFD877AEB488 noch hinzu. Natürlich den
Key den du in deinem Bootlaoder auch benutzt. Sollte einer dieser
Parameter nicht übergeben worden sein so lädt die PC-Software die
nötigen Einstellugen aus der INI-Datei AVRootloader.ini. Man könnte also
auch einfach "AVRootloader.exe -Apc" aufrufen und sollte dann vorherig
einmalig alle Parameter im GUI der Software voreingestellt haben.
Vergiß auch nicht ein neues Passwort zu erzeugen, damit du nicht das im
Source vordefinierte benutzt, macht ja keinen Sinn wenn jeder dein
Passwort kennt ;) Dazu startest du meine PC-Software und drückst den
"Make Password" Button auf der ersten Seite. Daraufhin wird per Zufall
ein Passwort erzeugt und auch gleich in AVRootloader.asm geschrieben.
Alternativ kannst du auch noch dieses neue Passwort in die
AVRootlaoder.ini schreiben lassen. Und es wird auch noch in die
Zwischenablage kopiert, also einfach STRG+EINFG drücken wenn du es
woanderst sichern möchtest.
Gruß Hagen
Vielen vielen Dank für die ausführliche Info! Echt super, dann kann ich
ja gleich loslegen :)
Ich habe nur ein kleines Problemchen: Meine Hardware meldet sich nicht,
ich flashe den Bootloader nach dem Compilergang, das klappt wunderbar.
Aber leider bekomme ich keine Verbindung.
Ich habe einen Mega644p mit 16 MHz, habe BOOTRST gesetzt, BOOTSZ0 und
BOOTSZ1 nicht.
Mit dem Fastboot von Peter Danegger klappt es an der Hardware prima,
Deiner läuft offenbar nicht. Was könnte ich da falsch machen?
Habe den normalen Uart0 an, also PD0 und PD1 als Pins.
Uartinvert habe ich beide ausprobiert.
Irgendwelche Tipps?
Louis
1.) in AVRootloader.asm
.include "m644Pdef.inc"
.equ UseWDR = 1
.equ UseAutobaud = 1
.equ UseVerify = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseSRAM = 0
.equ UseCrypt = 1
.equ UseCryptFLASH = 1
.equ UseCryptE2 = 1
.equ UartInvert = 1
.equ RX_PORT = PORTD
.equ RX = PD0
.equ TX_PORT = PORTD
.equ TX = PD1
.set XTAL = 16000000
.set BootDelay = XTAL/4
.set BootBaudrate = 115200
.set BootVersion = 2
.set BootCodeSize = 852
nun neu kompilieren, und HEX file auf AVR uploaden. Fuse auf "First Boot
Start" und BOOTRST setzen. Boot Flash size=512 words Boot start
address=$7E00 ($FC00)
Danach AVR über RS232, du benutzt doch einen Pegelwandler ? falls nicht
und du benutzt direkt die RS232 Leitungen dann UartInvert=0 setzen.
PC-Software starten, und richtigen COM Port auswählen und Baudrate
einstellen 112500 ist ein guter Wert. Nun Button "Connect to Device"
drücken und eventuell den AVR reset'en. Im "Protocol" Window sollte dann
stehen das er auf 2-Wire Modus gewechselt ist.
Wenn er dann eine Verbindung hat kannst du in "Device Information" alle
wichtigen Einstellungen zum AVR sehen.
Als nächsten Test "EEPROM Content" und "Read from Device" ausprobieren.
Und dann mal einige Änderungen von Hand im HEX Editor machen und "Write
to Device" drücken.
>> Deiner läuft offenbar nicht.
bei dir nicht ;)
Hast du sonst igrendwas in AVRootloader.asm verändert ? zb. BootSign:
"BOOT" oder sowas ?
Gruß Hagen
Arg...es war der Programmer, der Hat Mist geschrieben, am Ende fehlte
etwas, anscheinend ist der defekt. Ich habe es jetzt aber am Laufen,
wunderbar!
Encryption läuft auch, genau das habe ich gesucht. Super, vielen vielen
Dank!
Louis
Hi Louis,
beachte bitte folgendes damit es auch kryptographisch sicher ist:
1.) erzeuge mit der PC-Software einen neuen Schlüssel
- steht dann in AVRootloader.asm bei BootKey: drinnen, 16 Bytes
- steht wenn du möchtest in AVRootloader.ini in Password=?? drinnen
2.) stelle sicher das die Option UseSRAM=0 ist. Ansonsten kann nämlich
ein cleverer Angreifer den Bootloader ausnutzen um ihn zu knacken indem
er gezielt den SRAM und damit IO/Register Bereiche manipuliert.
3.) stelle sicher das UseCryptFLASH=1 ist, ansonten bei UseCryptFLASH=0
kann man verschlüsselte wie auch unverschlüsselte Daten schreiben, und
somit auch ein eigenes Program das den Bootlaoder FLASH ausliest und
somit auch den BootKey:, es sei denn das LPM/SPM in der Application
Section verboten wird über die Fuses.
4.) wenn du deine/meine Bootloader-PC-Software deinen Kunden gibts
stelle sicher das dort in der AVRoiotloader.ini bzw. nirgends der
Schlüssel gespeichert ist
5.) liefere ausschließlich nur verschlüsselte ACY Dateien aus
Falls du mit Delphi meine AVRootloader.dll benutzt wäre ich für ein
Feedback sehr dankbar, ich würde gerne sehen was daraus wird ;)
Gruß Hagen
Hallo Hagen,
danke für die Tipps, ich habe sie jetzt bei einem Exemplar mal
angewandt, das Teil ist jetzt sozusagen dicht und nur noch durch meine
Software beschreibbar. Das ist genau das, was ich gesucht habe, jeder
kann ein Update flashen, aber nur eins dass von mir kommt und geprüft
ist. So kann auch keiner den Code knacken und sehen wie die Software
arbeitet. perfekt.
Mein Mega64 wird nach Abschluss mit beiden Lockbits gelockt, das sollte
so bombensicher sein.
Ich gebe bescheid wenn ich die Software soweit habe, noch ist sie nicht
100% fertig.
Louis
>Mein Mega64 wird nach Abschluss mit beiden Lockbits gelockt, das sollte>so bombensicher sein.
Aber nicht den Fehler machen, wie ich aus Überschwenglichkeit, alle
Lockbits zu setzen, auch diejenigen die dem Bootloader den LPM/SPM
Befehl sperren ;)
Gruß Hagen
Hehe, nene, so doof bin ich nun auch wieder nicht..
Btw, was genau bedeutet eigentlich SPM und LPM? Steht überall im
datasheet, nur die Erklärung fehlt...
Louis
SPM - Store Program Memory
LPM - Load Program Memory
Weist auf die beiden gleichnamigen Assembler Mnemonics, mit denen sich
der Mikrocontroller selbst den Flash schreiben bzw. aus seinem eigenen
Flash (innerhalb des Programms) lesen kann.
Ich habe die sehr nette AVRootloader fuer ein ATmega32 implimentiert. Es
funksioniert auch schon, aber nicht alles wie es beschreibt ist.
"Make Password" ohne in AVRootloader.ini zu spechern tut nichts. Was
heist "in die Zwischenablage kopiert und kann so anderenorts gespeichert
werden"?
Bei mir wird nichts weiter abgefragt un nichts gespeichert.
Muss in AVRootloader "Password = " stehen mit blank?
Doch, tut es: Das Kennwort wird in die .asm-Datei des Loaders
gespeichert, (ganz unten...) Beim Assembler-Lauf wird es dann in den
Code eingefügt, der Loader muss es ja irgendwo her wissen wenn er einsam
und alleine in seinem Megaxxx seitzt und auf Programme wartet.
Das Passwort selbst wird in die Zwischenablage kopiert, öffne Notepad
und drücke STRG+V, dann siehst Du es.
Das Kennwort solltest Du GUT aufbewahren, ist es weg kannst Du keine
Software mehr laden!
Louis
> Muss in AVRootloader "Password = " stehen mit blank?
Jain ;) Entweder
[System]
Password=
mit oder ohne Leerzeichen ist egal da diese intern entfernt werden, oder
[System]
Password=0A5ED11C8B0FA36F7C4F1EE20526904B
oder
Password=$0A,$5E,$D1,$1C,$8B,$0F,$A3,$6F,$7C,$4F,$1E,$E2,$05,$26,$90,$4B
Alle Sonderzeichen, auch Spaces werden entfernt und das was übrig bleibt
sind die HEX-Chars und das wird als Passwort benutzt. Ob man A..F groß
oder klein schreibt ist egal.
Wenn kein Passwort in der INI Datei gespeichert wurde fragt die
PC-Software per Dialogbox das Passwort ab wenn es benötigt wird. Das
Passwort in die INI Datei zu speichern erleichtert dem Programmierer
also die Arbeit. Bei der Installation der Software bei deinen Kunden
sollte das Password nicht gespeichert werden, logisch.
Beantwortet man die Frage "Do you want to save Password in INI-File ?"
mit NEIN/NO dann wird das Password in der INI Datei gelöscht.
Danach wird die AVRootloader.asm Datei mit dem neuen Passwort
modifiziert und zusätzlich ins Clipboard kopiert. Du kannst es also per
Paste irgendwo selber abspeichern.
Um das Passwort nicht zu verlieren bietet es sich an die geänderte
AVRootloader.asm zu sichern, im Projektbackup das ja jeder Programmierer
auch macht ?!
Nach "Make Password" muß also AVRootloader.asm neu kompiliert werden.
Gruß Hagen
Hallo,
also der Bootloader ist eine tolle Sache. Hab diesen erfolgreich auf
einen ATmega8 im Einsatz. Jetzt wollte ich diesen auf einen ATtiny85
auch benutzen.
Leider kommt beim Flashen folgender Fehler:
Cmd.WriteFlash.ResCheck() Error: Verify failed
Folgendes habe ich bereits probiert:
1. Informationen lesen, funktioniert Software erkennt den ATtiny85
2. EEPROM lesen, schreiben, schauen ob sich was zufällig ändert.
Funktioniert auch.
3. Wie 2. nur mit SRAM.
4. Flashen via ISP funktioniert.
5. Anderer ATtiny85 gleiches Problem
6. Verschiedene Baudraten, keine Erfolg
Im Anhang die ASM die ich benutze.
Vieleicht hat jemand eine Lösung.
letzte Version der PC-Bootloader Software downloaden.
Mit welchem Entwicklungswerkzeug hast du dein HEX erzeugt ? Also das was
du über den Bootloader flashen möchtest.
In den älteren Versionen der PC-Software war bei der Interpretation der
Daten im HEX File ein Fehler. Sobald im HEX File die Addressen nicht
linear sortiert gespeichert wurden gabs mit der alten Version Probleme.
Wenn man mit AVR Studio oder WinAVR GCC arbeitet entstand dieses Problem
nicht.
Alternativ in der AVRootloader.INI die Section [Timeouts] modifizieren,
sprich größere Timeouts wählen.
Ich tippe aber auf ersteres Problem. Kannst ja mal das HEX File posten.
Übrigens kannst du das UseVeritfy = 0 sezten und so par Bytes Code
sparen was dazu führt das die 518 Bytes in deinem Falle unter 512 Bytes
sinken und du somit eine Flashpage (64 Bytes) weniger für den Bootloader
verbrauchst. Beim Schreiben vom FLASH/EEPROM ist schon eine Prüfsumme
enthalten und auch ein integrierter Lesetest der soeben programmierten
Daten, ergo: ein implizites Verify. Das zusätzliche externe Verify das
mit UseVerify=1 aktiviert wird dient nur als zusätzliche Absicherung
bzw. um testen zu können ob der FLASH eines schon programmierten AVRs
mit einem HEX File übereinstimmt. Wenn man also nur sichergehen möchte
das die aktuelle Programmierung korrekt verlief dann recith das
impliziete Verify aus und man kann mit UseVerify=0 einiges an Code
sparen (der natürlich dann deiner Anwednung zugute kommt).
Gruß Hagen
Hallo,
Danke für die Antwort. Also die AVRootloader.exe ist vom 06.05.08 und
ist ca. 940KB groß. Die HEX erzeuge ich mit avr-gcc 4.2.2. Das mit der
UseVerify ist z.Z. noch aktiv weil eben dieser Fehler auftritt. Das mit
den Timeout's werde ich noch probieren. Gibt es denn einen offiziellen
(ich nen das mal so) Downloadplatz?
Gruß Daniel
Ok, aktuellste Version hast du und HEX sieht auch sauber aus. Bleiben
noch zwei Möglichkeiten
a) erhöhe die Timeouts, denke aber nicht das das was ändert
b) dein AVR könnte defekt sein, bzw. dessen Spanungsversorgun instabil.
Versuche den AVR mal über ISP zu flashen.
Connecte mal mit dem Bootloader und poste hier alle was im Info Fenster
angezeigt wird, vielleicht kann ich ja daraus was erkennen.
Downloadplace ist hier dieser Thread ;)
Gruß Hagen
Daniel wrote:
> Leider kommt beim Flashen folgender Fehler:> Cmd.WriteFlash.ResCheck() Error: Verify failed
Ich tippe mal auf Selbstprogrammierfuse nicht gesetzt.
Peter
Hallo Hagen,
ich bin von dein Bootloader voll begeistert.
Mit meinem ATmega8535 habe ich gleich probiert.
Funktioniert soweit, bis auf die Lockbits.
Setze ich keine Lockbits kann ich mein FLASH-Programm problemlos immer
wieder neu beschreiben.
Möchte ich mein Programm vor dem Auslesen schützen, so setze ich dann im
Programmer BOOTLOCK02. Damit kann ich das Auslesen mit einem ext.
Programmer verhindern. Leider geht dein EXE-Prog. dann nicht.
Fehlermeldung kommt:
Cmd.SetAddr. readByte() ICOM: read error
Besteht die Möglichkeit, mit deinem EXE-Prog. nur den FLASH zu schreiben
ohne das das Programm immer erst auf EEPROM oder FLASH lesen will? Was
ja nicht geht, weil ich den Ausleseschutz aktiviert habe.
Grüße
Hallo Hagen,
zwischenzeitlich habe ich mal dein Delphi-Programm ausprobiert.
Bei der Function "Button2Click..." habe ich "FLoader.DoProgram(False,
False)" probiert und bekommen die gleichen Rückmeldungen wie unter
Einstellungen von "True":
Connection : 2-Wire
Device name : ATmega8535
Device signature : 1E9308
SRAM size : 512 Byte
EEPROM size : 512 Byte
FLASH size : 8192 Byte
FLASH size for application : 7680 Byte
FLASH pagesize : 64 Byte
Bootloader size : 512 Byte
Buffersize for data : 472 Byte
SRAM start address : 96
Bootloader version : 2
Use bootsection : Yes
Cryptography supported : No
Device connected
Program...
execute compiled data
selected options in compiled file:
- programming FLASH
- erase FLASH during programming
- full verify FLASH after programing
Cmd.WriteFlash.ResCheck() Error: Verify failed
Grüße
@Elektroniker
Ich habe das Datenblatt des ATMega8535 nicht zur Hand aber die Fuses
müssen so programmiert werden das
- das Auslesen per ISP etc.pp. nicht mehr möglich ist
- das die korrekte Bootsection eingestellt wird, also >= 512 Bytes = 256
Words
- evntl. den SPM Befehl aus der Application Section verboten wird
- evntl. der LPM Befehl aus der Application Section verboten wird
- der Code in der Boot Section, eg. der Bootloader, per SPM und LPM
Zugriff auf die Application Section und mindestens per LPM Zugriff auf
die Boot Section hat
Der Bootloader muß also per SPM + LPM in die Application Section Zugriff
haben. Du kannst den SPM ZUgriff des Bootloaders in die eigene Boot
Section verhindern damit sich der Bootloader nicht selber löschen kann.
Aber in jedem Fall muß der Bootloader per LPM den kompletten FLASH
auslesen können. Einerseits weil der Bootloader nach dem Programmieren
des FLASH/EEPROM per LPM diesen wieder ausliest und mit den soeben
programmierten Daten im SRAM-Buffer vergleicht, ergo implizites Verify
beim Programmieren. Und andererseits weil der Bootloader am Ende im
FLASH eine Tabelle mit wichtigen Daten enthält die er auslesen können
muß, also solche Daten wie Signatur und Identifier.
Lange Rede kurzer Sinn: ich schätze du hast zu viele Lockbits gesetzt
und damit den Bootloader ausgesperrt.
Gruß Hagen
>Bei der Function "Button2Click..." habe ich "FLoader.DoProgram(False,>False)" probiert und bekommen die gleichen Rückmeldungen wie unter>Einstellungen von "True":
Der Parameter "VerifyFlash" = TRUE kann nur dann von Relevanz sein wenn
die Datei die du flashen möchtest eine reine HEX Datei ist. Ist es aber
eine "precompilierte" ACY-Datei dann entscheiden die Optionen die bei
ihrer Kompilierung gesetzt waren. Erkennen kannst du das ganz einfach am
letzten Punkt im Protokoll
>selected options in compiled file:>- programming FLASH>- erase FLASH during programming>- full verify FLASH after programing
full verify FLASH after programming ist VerifyFLASH=TRUE bei einer
HEX-Datei oder die vergleichbare Checkbox in der
PC-Bootloader-Applikation bei der Erstellung einer ACY-Datei.
Ändert aber nichts an der Sache, da der Bootloader schon während des
impliziten Verifys gleich nach der Programmierung aussteigt. Dieses
Verify kann nicht deaktiviert werden per PC-Software, höchstens indem
man die AVRootloader.ASM Datei umschreibt.
Es gibt also im AVRootloader gleich zwei Arten des Verify. Das implizite
Verify wie vorher ausgiebig beschrieben. Und das separate und zu jeder
Zeit nachträglich durchführbare Verify, wie bei den vielen anderen
Bootloadern üblich. Letzeres benötigt man eigentlich nur um verifizieren
zu können ob der Inhalt einer gegebenen HEX Datei mit dem Kontext im AVR
übereinstimmt.
Gruß Hagen
Hallo Hagen,
danke für die schnellen und ausführlichen Anworten.
Mit dem Mega8535 kann man nicht so viele Fuses setzen. Meine gesetzten
Fuses:
BOOTRST, BOOTSZ1 und BOOTLOCK02
Wird BOOTLOCK02 nicht gesetzt, dann funktionioert alles. Leider auch das
Auslesen des Programms über den externen Programmer. Aber das möchte ich
verhindern.
Ich bin nochmal alle Postings in diesem Thread durchgegangen. Du hattest
am 06.05.2008 geschrieben:
>Vergiß niemals die Lockbits entsprechend zu setzen. Also nach dem Upload>der Bootloader Software die Lockbits so setzen das ein Auslesen des AVRs>nicht mehr möglich ist. Ansonsten hat das alles ja keinen Nutzen ;)
Wie kann man dein Bootloader einstellen, dass der die Lockbits setzt?
Und wenn die gesetzt werden, dann kann ich mit dein EXE-Prog. nicht mehr
auf den µC zugreifen, weil dann doch die gleiche Fehlermeldung kommen
müsste, als wenn das BOOTLOCK02 gesetz würde?
Soviel ich verstanden habe, werden die Lockbits immer gelöscht (egal vom
Bootloader oder über ext. Programmer), wenn das FLASH gelöscht oder neu
beschrieben wird.
Leider geht es nicht mit EXE-Progr. weil er gleich den Inhalt lesen
möchte und nicht vorher löscht oder neu beschreibt. Könnte das nicht
abgeändert werden, wenn ich den µC FLASH neu beschreiben möchte?
Oder?
Zum Delphi-Programm:
Ich finde es super, dass Du es in Delphi geschrieben hast und ich
programmiere selber nur in Pascal/Delphi und Assembler. Leider wissen
nicht soviele Leute von der tollen Programmiersprache Delphi/Pascal
gegenüber den Anderen. Ich brauche eigentlich nichts weiter ausführen.
Auf jedenfall hast Du mir schon mit deinem Delphi-Tipp erstmal geholfen
und werde es später noch vertiefen. Wenn Fragen diesbzgl. auftreten,
stell ich diese hier im Forum gerne rein.
Grüße
>Soviel ich verstanden habe, werden die Lockbits immer gelöscht (egal vom>Bootloader oder über ext. Programmer), wenn das FLASH gelöscht oder neu>beschrieben wird.>Leider geht es nicht mit EXE-Progr. weil er gleich den Inhalt lesen>möchte und nicht vorher löscht oder neu beschreibt. Könnte das nicht>abgeändert werden, wenn ich den µC FLASH neu beschreiben möchte?>Oder?
Nee da hast du was falsch verstanden. Der Bootloader selber setzt die
Fuses nicht, das kann er garnicht. Man könnte für neuere AVRs die
verschiedene Fuses per Program setzen können, diese Funktionalität in
den Bootloader implementieren, aber dabei sehe ich keinen wirklichen
Nutzen.
Du programmierst über ISP/JTAG/DW die AVRootloader.HEX in den AVR,
natürlich vorher kompiliert für deinen AVR mit deinen gewünschten
Optionen. BOOTSZ Fuse setzen damit der AVR beim RESET den Bootloader
startet. Danach mit PC verbinden und PC-Bootloader starten und als Test
mal EEPROM/SRAM auslesen und schreiben. Wenn das geht kannst du die
Lockfuses setzen. Das dürfte schon reichen denn nun kann man den
ISP/JTAG nur noch aktivieren wenn man den AVR vollständig löscht.
Also mit AVRStudio so:
BOOTSZ=Boot Flash size=256 words Boot address=$0F00
Lockbits:
LB=Further programming and verification disabled
BLB0=SPM prohibited in Application Section
BLB1=No lock on SPM and LPM in Boot Section
Ergibt Lockbits=0x38
Man kann also den ATMega8535 schon so konfigurieren das es ziemlich
sicher ist.
Die Frage ist also mit welchem Programmiertool du den AVR flash'st.
Gruß Hagen
Hallo Allerseits,
bei Verwendung von 'BootMsg' unbedingt darauf achten, dass der Text eine
UNGERADE Anzahl von Zeichen enthält.
Ansonsten hängt der Assembler ein NullByte an.
Dieses Byte wird auch ausgegeben und verwirrt das PC-Programm.
Das PC-Prog erkennt den connect nur zum Teil. Das Senden der 'BootSign'
wird eingestellt, das Programm selbst geht aber nicht in den Zustand
"connected".
Grüße JoJo
>bei Verwendung von 'BootMsg' unbedingt darauf achten, dass der Text eine>UNGERADE Anzahl von Zeichen enthält.>Ansonsten hängt der Assembler ein NullByte an.>Dieses Byte wird auch ausgegeben und verwirrt das PC-Programm.
Das lässt sich im PC-Program sehr einfach abstellen, werde das demnächst
mal bereinigen. BootMsg kann man auch nur verwenden wenn der Bootloader
ohne Verschlüsselung arbeitet.
>Das PC-Prog erkennt den connect nur zum Teil. Das Senden der 'BootSign'>wird eingestellt, das Programm selbst geht aber nicht in den Zustand>"connected".
Könntest du mir genauer erklären was du damit meinst ?
Ich interpretiere deine Aussage so das die PC-Software den
Connection-Aufbau einstellt, sprich in den Connect-Status wechselt,
obwohl der Bootloader im AVR immer noch im Connectaufbau verbleibt.
Eigentlich ist das aber sehr unwahrscheinlich. Die PC-Software sendet
permanent das BootSign. Solange bis der AVR die richtige Baudrate
detektiert hat und das empfangene BootSign mit dem im AVR im FLASH
gespeicherten verglichen hat und Übereinstimmung existiert. Danach
sendet der AVR seine BootInfo an die PC-Software. Diese geht erst in den
Connect Status wenn sie diese BootInfo sauber empfangen hat und die
darin enthaltenen Angaben auch stimmig sind. Dh. normalerweise geht der
AVR als erster in den Connect-Status und erst danach die PC-Software.
Von daher ist es also unwahrscheinlich das die PC-Software schon im
Connectstatus ist der AVR aber noch nicht.
Sollte es zu dem Fall kommen das der AVR nach Senden der BootInfo im
Connectstatus ist die PC-Software aber die empfangene BootInfo nicht
erkennt dann beginnt der Connectionaufbau von vorne. Die PC-Software
sendet also weiterhin #0#0#13 + BootSign. Der AVR der schon in der
Kommandoschleife ist, also connected, erkennt aber die beiden #0#0
Zeichen als Restart-Kommando. Bei diesem Kommando springt also der AVR
wieder an den Anfang des Bootloaders und befindet sich dann wieder im
Connection Aufbau Status. Dh. selbst wenn der AVR schon im Connectstatus
ist die PC-Software aber noch nicht so synchronisiert sich der AVR
spätestens beim nächsten Connectionaufbau der PC-Software neu.
Je länger also BootSign gewählt wird desto wahrscheinlicher kann die
PC-Software und der AVR einen Fehler in der autom. Baudrate-Erkennung
oder Datenübertragung erkennen. Es ist also von Vorteil für die
Stabilität wenn BootSign länger gewählt wird.
Gruß Hagen
>AVR antwortet mit:>[94][06][02][08][30] = 4 Byte 'BootInfo' + Success>[48][65][6C][6C][6F][20][57][6F][72][6C][64][30] = 11 Byte 'BootMsg' +>Success>[C2][94][06][02][08][30] = 1 Byte ??? + 4 Byte 'BootInfo' + Success>[48][65][6C][6C][6F][20][57][6F][72][6C][64][30] = 11 Byte 'BootMsg' +>Success
Was mich wundert ist das der AVR zweimal die BootInfo sendet. Das
unbekannte Byte 0xC2 ist ein Fehlercode.
Im Attachment mal eine geänderte Version der AVRootloader.exe. In dieser
behandle ich die evntl. auftretenden Nullterminatoren der BootMsg.
Gruß Hagen
Hallo Hagen,
mit der neuen Version von 'AVRootloader.exe' läuft es einwandfrei.
Das BootMsg nur ohne Verschlüsselung verwendbar ist war mir vorher nicht
klar.
Besten Dank für die schnelle Hilfe.
Gruß JoJo
BootMsg liegt zwischen BootInfo und BootKey. Bei der Aushandlung der
Verschlüsselung zwischen Bootloader und PC Software wird ein verschl.
Prüfcode benutzt. Dieser besteht aus BootInfo und ersten 4 Zeichen von
BootKey. Bevor die verschl. Daten an den AVR gesendet werden, muß dieser
Prüfsummen-Block an den AVR gesendet werden. Nur wenn die entl.
Prüfsumme identisch zu BootInfo + 4 Zeichen BootKey ist, kann der AVR
programmiert werden, bzw. akzeptiert der Bootloader die
Programmierungskommandos.
Liegt nun eine BootMsg zwischen BootInfo und BootKey so verändert dies
die Signatur.
Gruß Hagen
Hallo Hagen,
endlich bin ich wieder dazugekommen weiter zu machen.
Das Problem wurde mit LOCKBIT1 und LOCKBIT2 gelöst, d.h. diese Bits
werden gesetzt. Die BOOTLOCK01/02/11/12 dürfen nicht gesetzt werden, ist
nur ein Bit gesetzt, dann kann der Bootloader nicht richtig mit dem
Zielsystem verbinden.
Auf jedenfall arbeitet es sehr gut.
Danke nochmal für die ausführlichen Antworten.
Als Programmer nehme ich den ISP2-USB von E-LAB. Ein sehr gutes Teil mit
vielen Möglichkeiten.
Grüße
Hallo Hagen,
ich muß gestehen daß ich Deinen Code noch nicht so ganz verstehe. Den
anfänglichen Verbindungsaufbau durch Vergleich von [BootSign] und
anschließender Übertragung der [BootInfo]+ SUCCESS, sowie optionaler
[BootMsg] + SUCCESS zum PC habe ich soweit begriffen. Doch wie geht's
weiter? Ich glaube erkannt zu haben daß zuerst eine komplette Page ins
SRAM abgelegt wird, die im AVR berechnete CRC16 mit der vom PC
verchickten CRC16 verifiziert wird und anschließend der eigentliche
,Erase-Flash'-Vorgang gestartet wird.
OK,ich weiß - eigentlich läßt sich Dein Bootloader ohne nennenswerte
Modifikationen verwenden. Das ist bei meinem Projekt (Funkvernetztes
Multicontrollersystem) so nicht möglich. Ich würde mich deshalb sehr
freuen wenn Du mir das Protokoll im Detail beschreiben könntest.
Viele Grüße
Marcus
@ Hagen Re
Wie ich dem Quelltext entnehme, wird der ciphertext nach den ersten 16
Runden mit dem Initialisierungvektor (bzw. danach mit dem jeweiligen
vorherigen Ciphertext) xored um nach den zweiten 16 Runden nocheinmal
xored zu werden.
Ich würde gerne mal wissen wie Du darauf gekommen bist und ob Du bitte
einen Link mit einer Kryptoanalyse oder irgendeine andere Referenz dazu
nennen könntest?
@ Hagen Re
Also ich habe im Moment zwei Verständnisprobleme:
1. In Deine Datei AVRootloader.txt lese ich " Das zweifache XOR'ing des
Feedback vor den ersten 16 Runden und vor den zweiten 16 Runden
verändert den XTEA auf eine Weise das eine Alles oder Nichts
Entschlüsselung entsteht. Ändert sich also nur 1 Bit in den Daten so
wird der komplette Datenblock und alle auf ihn nachfolgenden Datenblöcke
falsch entschlüsselt."
Wenn ich CBC mode richtig verstanden habe, wäre das aber auch mit einem
einmaligen XOR vor jedem 32 Runden Zyklus gegeben. (Gemäß der unten
angegebenen Beschreibung von CBC in wikipedia).
2. Die Terminologie weicht von der mir bekannten ab.
Was ist mit Feedback gemeint? Wo bleibt der Initialization Vector?
Als Referenz bitte ich Dich, wenn möglich die beiden Seiten aus
Wikipedia zu verwenden:
CBC: http://de.wikipedia.org/wiki/Cipher_Block_Chaining_Mode
bzw. http://en.wikipedia.org/wiki/Block_cipher_modes_of_operation
XTEA: http://de.wikipedia.org/wiki/Extended_Tiny_Encryption_Algorithm
bzw. http://en.wikipedia.org/wiki/XTEA
@Klugscheisser:
1.) XTEA ist eine Stromverschlüsselung. Normalerweise benutzt man bei
diesen Ciphern keine Feedbackoperationen sondern wendet sie direkt auf
den Datenstrom an. Dabei wird mit XTEA aus einem Key ein Schlüsselstrom
erzeugt, quasi wie bei einem Pseudozufallsgenerator der Seed und der
Zufallsbitstrom, und dieser wird einfach per XOR mit den Daten
verknüpft.
2.) CBC ist ein Feedbackmodus der für die Blockverschlüsselungen
sinnvoll ist. CBC ist dabei ein sogenannter selbstsynchronisierender
Feedbackmodus, es gibt auch noch andere. Eine Blockverschlüsselung
zerlegt die Nachricht in Datenblöcke a zb. 8 Bytes und verschlüsselt
dann mit dem Cipher diese Blöcke, jeweils immer komplett separat ohen
Abhängigkeiten zwischen den einzelnen Blöcken. Das wäre der ECB Modus ->
Electronic Code Book Cipher Mode. CBC verknüpft nun diese Datenblöcke
untereinander. Angenommen wie haben eine Nachricht aus 4 Datenblöcken a
8 Bytes. Der zu entschlüsselnde Ciphertext wurde aber mit einem
Bitfehler empfangen der sich im 2. Datenblock befindet. Wird nun
entschlüsselt so passiert beim CBC folgendes: 1. Datenblock wird korrekt
entschlüsselt. 2. Datenblock wird auf Grund des Bitfehlers komplett
falsch entschlüsselt. 3. Datenblock kann unter Umständen ebenfalls noch
falsch entschlüselt werden, aber der 4. Datenblock wird wieder korekt
entschlüsselt.
Dh. Selbstsynchronisation bei einem Feedback Modus heist das sich ein
Bitfehler in einem Datenblock maximal diesen Datenblock + dem
nachfolgenden Datenblock falsch entschlüsselt. Alle nachfolgenden
Datenblöcke, wenn ohne Fehler empfangen, werden auch wieder korrekt
entschlüsselt.
3.) angenommen unser Ciphertext umfasst 10 Datenblöcke. Der 10.
Datenblock enthält eine Prüfsumme oder einen bekannten Identifier oä.
Wir möchten nun das wenn in einem der 10 Datenblöcke ein Bitfehler
entstanden ist das der letzte 10. Prüfsummendatenblock mit 100%
Sicherheit auch komplet zerstört wird. Dh. wir möchten das ein Bitfehler
im Ciphertext sich bis zum letzten Datenblock propagiert.
Dies zerstört die Selbstsynchronisation des CBC-Modus, dh. die
Selbstsynchronisation des CBCs ist für unserer Zwecke unerwünscht. Denn
4.) wie wollen mit XTEA nicht nur Daten schützen sondern deren
Integrität sicherstellen. Und dazu kann man sogennate CMACs benutzen,
also Message Authentification Codes basierend auf
Ciphern/Verschlüsselungen.
5.) Da XTEA eine Stromverschlüsselung ist habe aber die Plaintextdaten
keinen Einfluß auf den internen Zustand des Ciphers. Dh. der Copher
produziert nur vom Passwort abhängige Schlüsselströme. Bei einem
Blockcipher stellt der äußere Feedbackmodus, hier CBC, aber sicher das
der Ciphertext sowohl vom Passwort wie aber auch Datenstrom abhängig
ist. Und exakt das benötigen wir auch um überhaupt einen CMAC aufbauen
zu können, also die Abhängigkeit alle nachfolgenden verschlüsselten
Datenbytes vom Schlüsselstrom wie auch von den vorherig verschlüsselten
Datenbytes.
6.) also benutzt meine XTEA implementierung einen Feedbackmodus der im
Grunde genommen für XTEA als Stromverschlüsselung normalerweise garnicht
benutzt wird. Würde man diesen äußeren CBC Feedback nur anwenden nachdem
ein Datenblock durch XTEA verschlüsselt wurde dann würden sich die
Datenbytes der Nachricht aber nicht auf die internen Zustandsregister
des XYTEAs nicht auswirken. Es fehlt also eine grundlegende Bedingung um
mit XTEA+CBC einen CMAC errechnen zu können. Deshalb arbeitet mein XTEA
so das er die 32 Runden in 2x 16 Runden XTEA splittet. Der CBC Modus
wird nun zweimal angewendet, einmal vor der Entschlüsselung des
Datenblockes, für die ersten 16 Runden. Dann wird das
CBC-Feedback-Register erneut mit dem internen XTEA Registern
xor-verknüpft und nochmals die zweiten 16 Runden XTEA angewendet. Nun
ist sichergestellt das auf kryptographisch sichere Weise der Datenstrom
der Nachrichtenbytes in den internen Status des XTEAs eingearbrieitet
wurde. Wir können nun mit diesem XTEA Daten verschlüsseln wie auch die
Integrität der Daten durch einen CMAC überprüfen. Denn ein empfangener
Bitfehler führt mit 100% sicherheit immer dazu das alle nachfolgenden
Datenbits bishin zum letzen Datenblock fehlerhaft entschlüsselt werden
müssen.
Nun der Bootloader verschlüsselt mehrere FLASH Pages in folgender Weise:
1.) ein 8 Bytes Datenblock aus ZUfall wird erzeugt + 8 Bytes BootInfo
Signatur + ersten 4 Bytes des Schlüssel. Dieser Datenblock wird als
allerrster zum AVR gesendet und initialsiert die Entschlüsselung. Durch
die Zufallsbytes und der Eigenschaft der vollständigen Propagation
meiner XTEA+2xCBC Implementierung heist dies das unsere kompletter
Ciphertext randomisiert wurde. Also selbst wenn man die exakt gleiche
HEX Datei mit dem exakt gleichen Key merhmals verschlüsseln würde so
wäre der Ciphertext immer komplett anderst. Dies verhindert solche
Angriffe wie Known Plain-/Ciphertext/Reply/Exchange Attacks.
Zusätzlich serialisiert man das HEX auf den spezifischen AVR da die
nächsten 4 Bytes identisch zur BootInfo sein müssen. Dh. ein verschl.
HEX kann nur entschlüsselt werden wenn die im ersten Block enthaltene
BootInfo (Signatur des Bootloaders + AVR) identisch ist. Die letzen 4
Bytes im Datenblock sind die ersten 4 Bytes des Passwortes, also 32Bit.
Der AVR entschlüsselt also diesen ersten Datenblock und nur wenn diese 4
Schlüsselbytes identisch zum Key sind kann korrekt entschlüsselt werden.
Man detektiert somit also entweder einen Datenübertragungsfehler mit
1/2^32 Wahrscheinlichkeit oder aber man erkennt das mit einem falschen
Passwort gearbeitet wurde. Wichtig dabei ist es das dem Angreifer
keinerlei Möglichkeiten in die Hand gegeben werden einen Ciphertext
schneller als bei einer Brute Force Attacke brechen zu können und auch
das der Angreifer unsere "Prüfsummenlogik" mißbrauchen kann um seine
Brute Force Attacke zu beschleunigen. Das stellt der Zufallsseed und das
unbekannte Passwort als Verifier sicher.
2.) Nun sendet der AVR Blockweise die zu programmierenden FLASH Daten.
Dabei sind diese Daten in Blöcke a max. nutzbarere SRAM für Buffer
aufgesplittet. Bei einem SRAM mit 256 Bytes und einer FLASH Pagesize von
64 Bytes wird dieser Buffer also 192 Bytes groß sein und man kann 3
FLASH Pages am Stück übertragen. Der XTEA Cipher wird dabei nicht mehr
neu initialisiert sondern arbeitet mit der Initialisierung im Step 1.)
immer weiter. Somit hängt der Erfolg der korrekten Entschlüseelung
dieser Datenblöcke von allen vorherigen Datenblöcken ab. Der PC sendet
nun 192 Bytes an Daten die ge-flasht werden sollen und hängt als letzten
8 Bytes Datenblock wiederum einen Spezialdatenblock an. In diesem wird
auf die Addresse des FLASHs in dem die Daten geflasht werden sollen
verschlüsselt. Also auch die Addresse wohin man die Daten schreiben soll
sind verschlüselt gespeichert. Neben dieser Addresse (3 Bytes) sind in
diesem Datenblock wiederum die ersten 4 Bytes des Keys verschlüsselt,
quasi als Prüfsumme. Da mein XTEA+2xCBC, wenn er mit einem Bitfehler
dekodiert, alle nachfolgenden Datenbytes ebenfalls falsch dekodiert,
wird somit diese 4 Bytes Prüfsumme ebenfalls falsch dekodiert. Man kann
also mit einer Entschlüsselung nicht nur die Daten schützen sondern
sparrt sich einen extra Prüfsummen Algorithmus zu implementieren der
auch kryptographsich sicher sein muß ! Eine CRC ist ja kryptographsich
nicht sicher man müsste schon mit einem HMAC-> Hash Message
Authenfication Code arbeiten und somit würden wie einen Hashalgo. wie
SHA1 oä. implementieren müssen. Das sparen wir uns mit meiner
abgewandelten Form des XTEAs.
Einen kryptographischen Beweis der Sicherheit meiner Abwandlung kann und
werde ich dir nicht liefern können. Aber wenn du mal genau drüber
anchdenkst ist das auch nötig da ich nur die bekiannten Verfahren
entsprechend kombiniert habe. Ich gehe also davon aus das meine
Abwandlung nicht die Eigenschaften des XTEAs noch CBCs kryptrographisch
negativ beeinflusst. Immerhin wende ich wie gehabt CBC vor der
Entschlüsselung an, das ist Standard. Dann nach der Hälfte der
Entschlüsselung wende ich CBC erneut an und beeinflusse nur indirekt
über die XOR Operation den internen Status des XTEAs, das hat keinen
Einfluß auf die Sicherheit vom XTEA da wir nur die zu entschl. Daten
modifizieren.
Sogesehen basiert mein 2x CBC zwar auf CBC hat aber längst nicht mehr
die Eigenschaften eines normalen CBC Modus.
Gruß Hagen
PS: ich habe jetzt nicht nochmal alles quergelesen, Tip- und
Rechtschreibfehler kannste behalten ;)
Ich musste bei der Konstruktion verschiedene Aspekte berücksichtigen
1.) Algo. muß auf AVR performant und Resourcenschonend sein
2.) alle mir bekannten Angriffe müssen ausgeschlossen sein. Also zb. das
der Angreifer mal eben zwei Datenblöcke austauschen kann ohne das der
Bootloader dies detektieren kann. Denn sonst wäre es möglich "gezielt"
eine/mehrere verschl. Nachrichten neu zu rekombinieren, ohne das der
Angreifer überhaupt Ahnung davon haben muß was er da an Daten vor sich
hat.
3.) der Bootloader muß sicherstellen können das das verschl. HEX für
seinen Prozessor/Bootloadertypus erzeugt wurde.
4.) der Bootloader soll erkennen ob die Daten mit dem korrekten Passwort
verschlüsselt wurden
5.) oberste Priorität hat die Integrität der zu flashenden Daten. Dh. es
muß ausgeschlossen sein das der Bootloader falsche Daten flasht.
Also aus meiner Sicht, und ich habe mittlerweile über 5 Jahre
intensivste praktische Erfahrungen mit der Kryptographie, sehe ich zZ.
keinen erfolgversprechenden Angriff auf die durch meinen AVRootloader
geschützen Daten.
An der Dokumentation des kompletten Kommando-/Daten-/Verschl-
Protokolles muß ich noch arbeiten. Bitte habt Verständnis das das noch
ein bischen Zeit benötigt. Es ist für mich ein Aufwand von 6 Stunden
sowas zu programmieren aber ein Aufwand von weit mehr Stunden sowas zu
dokumentieren und nachfollziehbar zu erklären warum es so und nicht
anders konstruiert wurde.
Gruß Hagen
>Vielleicht erlaubst Du mir doch die Bitte, doch den Quellcode der>Windows-Software zu posten. Das wäre nett. (oder habe ich was>übersehen?)
Hm, logisch betrachtet hat das Eine nichts mit dem Anderen zu tuen.
Meine Intention die Windows-Software nicht frei verfügbar zu machen ist
nicht in der Kryptograhie begründet, also zb. einer Hintertür die ich
hätte einprogramieren können. Es ist eine Frage des Supportaufwandes und
eben auch der Kontrolle der Verbreitung des AVRootloaders. Ich würde
also vorschlagen das du mir eine PN sendest und wir dann per EMail
aushandeln ob und wie du meine Sourcen benutzen/bekommen kannst. Die PC
Software wurde mit Delphi5 also PASCAL programmiert.
>Wir können nun mit diesem XTEA Daten verschlüsseln wie auch die>Integrität der Daten durch einen CMAC überprüfen. Denn ein empfangener>Bitfehler führt mit 100% sicherheit immer dazu das alle nachfolgenden>Datenbits bishin zum letzen Datenblock fehlerhaft entschlüsselt werden>müssen.
Diese Aussage von mir ist nicht ganz korrekt. Denn eine 100%'tige
Propagation von Fehlern kann es garnicht bei dem Verfahren geben. Wenn
der letzte 8 Bytes Datenblock falsch entschlüsselt wurde dann haben wir
mit 1/2^64 Wahrscheinlichkeit eine falsche Fehlerantwort vom System
bekommen. Logisch da das interne Feedbackregister für den 2x CBC nur 8
Bytes und der interene Status des XTEAs ebenfalls nur 8 Bytes groß ist.
Somit ist dies identisch zu einer 64 Bit breiten Prüfsumme.
Der letze 8 Bytes Datenblock der nach den zu flashenden Daten gesendet
wird besteht aus folgenden Daten:
3 Bytes Addresse an die diese Daten geflasht/geeepromt werden sollen
1 Byte Datenblock-Längen-Korregier-Byte. Angenommen wir möchten nur 5
Bytes im FLASH speichern dann haben wir das Problem das XTA+2x CBC aber
immer mit volständigen 8 Bytes großen Datenblöcken arbeiten muß. Wir
müssen also diese 5 Bytes mit 3 Bytes Zufall auffüllen. Bei der
ENtschlüsselung benötigen wir dann die Information das von den soeben
entschl. 8 Bytes nur 5 Bytes von relevanz sind. Nun dieses
Datenbblöck-Längen-Korrekturbyte macht dies, es würde dann den Wertt 3
enthalten der dann am Ende der XTEA Prozedur von der
Datenlängenvariablen subtrahiert wird. Dies hat den Vorteil das wir nur
1 Byte an Datenmenge verbrauchen denn ansonsten müsste man eine
Längenangabe der zu flashenden Daten benutzen und das wären mehr als 1
Byte an Information die jedesmal pro Packet gespeichert werden müssen.
Davon abgesehen kann der Korrekturfaktor nur den Wert 0 bis 7 annehmen
und somit verbleiben 5 Bits ind diesem Byte die man noch anders benutzen
könnte, als Flags zb.
4 Bytes Verifier, das sind die ersten 4 Bytes des BootKey. Dieser wird
nach der ENtschlüsselung mit dem Bootkey verglichen und nur wenn
identisch arbeitet das System weiter.
Beim allerersten empfangen Datenblock (16 Bytes) besteht der letzte
Datenblock mit fast identischen Aufbau wie vorher beschrieben. Nur mit
dem Unterschied das in den ersten 4 Bytes nun die BootInfo gespeichert
wurde, statt Addresse + Korrektufaktor. Somit ist die
Überprüfungsfunktion dieser "Prüfsumme" bei der Initialsierung wie auch
Datenentschlüsselung fast identisch.
Dh. alle Datenblöcke im verschl. HEX File sind vom allerersten
Initialiserungsdatenblock abhängig und somit auch von den allerersten 8
Bytes des verschlüsselten Zufallsseeds.
Gruß Hagen
>1. In Deine Datei AVRootloader.txt lese ich " Das zweifache XOR'ing des>Feedback vor den ersten 16 Runden und vor den zweiten 16 Runden>verändert den XTEA auf eine Weise das eine Alles oder Nichts>Entschlüsselung entsteht. Ändert sich also nur 1 Bit in den Daten so>wird der komplette Datenblock und alle auf ihn nachfolgenden Datenblöcke>falsch entschlüsselt."
Alles oder Nichts aus Sicht der aktuellen Position eines Bitfehlers oder
Bitmanipulation. Würde also das allererste Datenbit gekippt im
Ciphertext dann soll der AVR die komplette Nachricht bis hin zum
"Prüfsummen"block komplett fehlerhaft entschlüsseln. Sogesehen: man kann
nur Alles oder Nichts korrekt entschlüsseln. Wir benötigen dieses
Feature für den CMAC.
>2. Die Terminologie weicht von der mir bekannten ab.>Was ist mit Feedback gemeint? Wo bleibt der Initialization Vector?
Feedback, das ist das zusätzlich mötige 8 Bytes Register das bei fast
jedem Cipher-Feedbackmodus nötig ist. Feedback heist dann das über
dieses Register und meistens per XOR Operation eine Verknüpfung der
Datenblöcke untereinadner erfolgt. Würde man dies nicht machen, also im
ECB Modus arbeiten dann kann man verschiedene Angriffe durchführen ohne
den Cipher real brechen zu müssen. Zb. wir haben eine verschl.
Banküberweisund die aus 2 Datenblöcken bestünde. Im ersten Datenblöck
steht Absender + Betrag drinnen. Im 2. Datenblock steht der Empfänger.
Wir veranlassen als Angreifer die Zielperson uns eine Banküberweisung zu
machen, auf unser Konto. Wir fangen aber jede der verschl.
Banküberweisungen der Zielperson ab. Diese tätigt nun eine Überweisung
der Miete. Wir fangen diese Nachricht ab und ersetzen den letzen
Datenblock mit dem Datenblock unserer Banküberweisung die an uns gehen.
Schon geht die Miete auf unser Konto. Das ist möglich weil die
Datenblöcke eben vollständig separat voneinander durch ECB verschlüsselt
wurden.
Der InitVector ist hardcoded alles Nullen. Denn real betrachtet senden
wir ja als ersten 16 Bytes Datenblock einen verschl. Block bei dem die
ersten 8 bytes verschlüselster Zufall ist. Damit ist das real der
InitVector aber eben verschlüsselt. Denn es ist ja egal ob wir den IV am
Anfang mit lesbaren/ungeschützen Zufall benutzen oder aber einfach den
ersten zu entschlüsselenden Datenblock per Zufall erzeugen und diesen
dann als quasi "nachfolgenden" IV benutzen. Vorteil ist dabei das wir
das System kryptogaphisch damit stärken, ich vertrete also die
Auffassung das es besser ist mit einem fixen IV also Nullen o.ä. zu
benutzen und dafür den ersten oder sogar noicht den 2. Datenblock
einfach mit Zufall zu füllen und verschlüsselt zu speichern. In beiden
Fällen haben wir technsich betrachtet den gleichen Aufwand nur ist bei
meiner Methode der IV auch noch durch den Cipher geschützt.
Gruß Hagen.
Die zweistufige CBC Verknüpfung hat den Vorteil das man nur ein 8 Bytes
großes Feedback Register benötigt. Wollte man die gleichen Features mit
anderen Ciphermodis, die auch dafür konstrueirt wurden (also für CMAC)
implementieren, dann benötigt man größere Register, also mehr an
Variablen. Das wird für die Optimierung auf dem AVR den Registerdruck
auf die CPU erhöhen und somit mehr Resourcen verbrauchen und damit die
Performance reduzieren. Es ist dann einfacher XTEA als Funktion jeweils
mit auf 16 reduzierten Rundenanzahl auf zwei Aufrufe zu implementieren.
Und dann eben im Zwischenschritt das CBC-Feedbackregister erneut zu
manipulieren.
Mein XTEA benutzt also ein Feedbackmodus der auf CBC als Operation
basiert aber im Grunde ganz andere Eigenschaften des Gesamtsystemes
erzeugt. Damit ist es kein CBC mehr basiert aber analytisch auf dem
Kryptobeweis des CBCs.
Gruß Hagen
@ Hagen Re
Ich möchte Dir nochmals für die Mühe danken, die Du Dir mit der
Beantwortung der Fragen machst.
Mein eigener Bootloader wird sicherlich um einiges anders aussehen.
Dennoch lese ich Deinen Code und Deine Antworten mit grossem Interesse.
XTEA wird es halt auf jeden Fall, da der Code dafür wirklich extrem
klein sein kann.
Das Du die Verbreitung der Windows-SW kontrollieren möchtest akzeptiere
ich selbstverständlich. Wäre halt nett gewesen, ist aber nicht
notwendig.
Melde dich hier an und sende mir eine PN und dann kannst du die Sourcen
haben. Ich bin immer daran interessiert wenn sich dritte Personen die
Zeit nehmen und meine Sourcen analysieren und somit eventuelle Fehler
finden und beseitigt werden. Dasa erhöht ja die Anwendungssicherheit und
verifiziert meine Arbeit. Davon abgesehen könnten wir so per EMail noch
mehr Erfahrungen und Wissen austauschen und eventuell kann auch ich dir
gerade bei den Kryptosachen noch par Tipps geben.
>XTEA wird es halt auf jeden Fall, da der Code dafür wirklich extrem>klein sein kann.
Falls du ihn kürzer als meine Implementierung bekommst dann wäre ich dir
sehr dankbar wenn du mich daran partizipieren ließest.
Gruß Hagen
Hi Hagen,
habe heute mittag deine Soft runtergeladen, a bissel gelesen (bin
lesefaul)
parameter geaender (auf 2te rs232 des 128 mit max232)
Bootloder programmiert und funktioniert !,
!!! VIELEN DANK FUER DIE TOLLE SOFT !!!!
vlg
Charly
Ich habe da noch eine kleine Frage:
Man kann ja einen Bootstring angeben, der z.B die Hardwareversion
enthalten kann.
Wenn ich jetzt mit der DLL eine neue Software in den Controller laden
möchte, und der Bootstring nicht korrekt ist (z.B. falsches Gerät für
die Software), kommt bei mir keine Fehlermeldung, sondern es passiert
nichts.
Kann ich irgendwie abfragen, welcher Bootstring in der Hardware steckt
bevor ich mit dem Upload beginne? So könnte ich dann je nach Bootstring
eine andere Software auf den Controller laden.
Louis
Hi Louis,
du beziehst dich auf obigen Post mit der BootMsg: ?
Du benutzt die AVRootIntf.DLL und allozierst mit OpenAVRootloader(...)
ein IAVRootloader Interface. Dieses Interface hat mehere Sub-Interfaces
wie .CommandSet: ICommandSet oder eben .Device: IDevice. Über dieses
.Device Member des AVRootloader Interfaces kommst du an die .Info:
WideString ran. Nach dem also über .DoConnect() eine Verbindung
aufgebaut ist, kann man auf diese Info = BootMsg zugreifen. Oder aber in
deinem IApplication Interface die "Callback-.Methode" .Changed. Diese
Methode .Changed wird immer dann aufgerufen wenn sich zb. im
Verbindungsstatus verändert hat.
Alle Daten in .Device stehen auch nach einen .Disconnect() weiter zur
Verfügung. Erst beim nächsten .DoConnect() werden diese Daten
aktualisiert. Du kannst also ohne Probleme auf .Info zugreifen um damit
deine AVRs noch mehr zu serialisieren usw. Du hast über .Device Zugriff
auf alle Daten die auch meine PC-Software anzeigen kann.
Gruß Hagen
1
// connected Device Information, part of IAVRootloader
Aber beachte dabei das mit der Nutzung von BootMsg: keine XTEA
Verschlüsselung mehr nutzbar ist. Man könnte aber mit wenigen Änderungen
im Source BootMsg auch mit Verschlüsselung benutzen. Das habe ich aber
nicht weiter ausgebaut da der Trick mit BootMsg: quasi nur ein
Abfallprodukt war. Warum mit BootMsg: die Verschl. nicht mehr richtig
funktioniert habe ich in einem der verherigen Postings erklärt.
Gruß Hagen
Hallo hagen,
kann man den bootloader auch in externen anwendungen verwenden???
Habe ein VB 2008 Programm indem würde ich gerne eine update funktion
einbauen und dann die firmware flashen.
Kannst mir bitte mal n code exampel schicken oder so???
danke
Uff ich denke VB2008 sollte DLLs laden können und mit statischen
Interfaces umgehen können. Ich habe nur ein Beispiel für Delphi
beigepackt und mit VB2008 kenne ich mich im Grunde nicht aus. Meine Zeit
als ich mit Basic zu tun hatte war ja vor 20 Jahren, oder länger.
Du müsstest dann nur noch die Interfaces in AVRootIntf.pas nach VB
portieren. Ich habe dabei sehr darauf geachtet möglichst mit den
Standard Datentypen zu hantieren und alles stdcall deklariert wie es bei
COM/DCOM/ActiveX Controls nach MS Standard üblich ist.
Allerdings sind es eben statisch importierbare Interfaces und keine von
IDispatch ableiteten Interfaces wie bei leicht zu importierenden
COM/ActiveX Controls. Dazu hätte ich eine TypeLib bauen müssen und das
war mir einfach zuviel Overhead.
Ich meine du solltest es einfach mal probieren und wenn du möchtest
können wir bei EMail dann gemeinsam über deine Sourcen schauen. Also
verstehen würde ich ein VB Script schon nur dir jetzt ein
funktionierendes Beispiel liefern nicht. Dazu müsste ich mich erst
einarbeiten und das kostet zuviel Zeit.
Aber gehen solltes es wenn VB2008 DLLs importieren kann und Interfaces
unterstützt, was ich denke auch so ist.
Gruß Hagen
Hallöle!
Ich habe hier folgendes Problem:
Habe alle Einstellungen wie in AVRootloader.txt beschrieben gemacht,
kompiliert und mangels eines "AVRStudio-kompatiblen Brenners"
mit einem STK200-Parallelport-Brenner unter Bascom in den Controller
(Mega32) geschubst.
Ging auch gut und hat auch gefunzt. Allerdings nur EINMAL!
Scheinbar hat die zu brennende hex-Datei die Bootloader-Datei wieder
überschrieben.
Ich kann mich erinnern, dass man beim Microsyl-Bootloader erst einige
Einstellungen (Fusebits setzen) durchführen musste um den Bootloader in
einem geschützten Bereich zu verschieben/installieren zu können,
so dass er nach dem brennen immer noch da ist.
Könnte mir bitte jemand die Anleitung posten, wie ich das anstelle
(ihn im "Bootsector" zu installieren).
Ich würde den Bootloader gern als Ersatz für den Parallelportbrenner
benutzen, da auch teurere Notebooks nicht mehr zwingend nen Parallelport
haben.
Mit nem USB-RS232-Kabel funktioniert der nämlich Bootloader tadellos.
Danke
Du musst bei allem Megas die BOOTSZ Fuses entsprechend setzen. Wenn du
mit AVRStudio das ASM kompilierst dann wird im Message-Window auch
angezeigt welche BOOTSZ Fuses du setzen musst. Das hängt ja von der
Größe des compilierten Bootloaders ab. Zusätzlich kannst du dann noch
die Lock-Fuses setzen um den Mega dicht zu machen.
Leider kann ich dir aber nicht exakt sagern welche Einstellungen du bei
deinem Programmer treffen musst.
Machst du diese Einstellung nicht, so kannst du einmal die
AVRootloader.HEX programmieren und dann darüber nur einmal ein eigenes
Progranm über den Bootloader laden. Danach springt der AVR immer sofort
das eigen Program an und nicht zuerst den Bootloader.
Gruß Hagen
Hallo Hagen,
können wir Deine AVRootIntf.DLL etwas ausbauen ?
Es wäre schön wenn man zum Beispiel die Com Port Geschichte auch umgehen
kann um direkt über USB zu Flaschen (Stichwort: FTDI o. LPC...).
Aktuell wollte ich nämlich gerade einen Intel HEX Loader nachbauen hab
aber Deinen Thread gesehen und glaube das ich mir das sparen könnte.
Und ich hab gesehen wir nutzen beide Pascal könnte Dich also
unterstützen.
Gruß Gerry
@Gerry:
>Es wäre schön wenn man zum Beispiel die Com Port Geschichte auch umgehen>kann um direkt über USB zu Flaschen (Stichwort: FTDI o. LPC...).
Garnicht nötig, wird schon unterstützt ;)
Konzeptionell sind in AVRRootloader.DLL drei Interface implementiert.
1.) IAVRRootloader
dieses Interface wurde durch mich entwickelt und setzt die abstrakte
highlevel Schnittstelle der Bootloader Funktionen um. Es enthält also
das Kommunikationsprotokoll des Bootlaoders usw.
2.) ICOM
dieses Interface erledigt die serielle Kommunikation. Es ist die
Verbindungsschnittstelle zwischen IAVRRootloader und dem seriellen
COM-Port.
Auch dieses Interface habe ich komplett durchimplementiert.
3.) IApplication
Diese abstrakte Schnittstelle muß der Programmierer der die beiden
vorherigen Schnittstellen anwenden möchte implementieren. Es übernimt
die Aufgabe der Abfrage alle Parameter.
Einer der Parameter die das IAVRootloader Interface vom IApplication
Interface abfragt ist das Kommunikations-Interface, also die ICOM
Implementierung.
Wenn man nun per USB kommunizieren möchte so braucht man nur ein eigenes
ICOM Interface zu bauen das nicht auf dem COM Port aufsetzt sondern auch
USB.
Das eigene IApplication Interface wird in der Methode
function OpenCommunication: ICOM; stdcall;
also ein eigenes ICOM Objekt zurückgeben das dann auf die USB
Schnittstelle aufsetzt. Normalerweise wird jetzt die Funktion OpenCOM(),
importiert aus der DLL, aufrufen, und damit meine standardmäßige
Implementierung auf dem seriellen COM Port.
Du musst also in deinem IApplication Interface (Callbacks) nur die
OpenCommunication() abändern und dort eine eigene Implementierung eines
ICOM Interfaces das auf USB aufsetzt.
Gruß Hagen
@Gerry:
soweit erstmal so gut. Man muß aber nun noch überprüfen ob das
eigentliche Kommunikationsprotokoll des Bootloaders für USB auch
konzeptionell tauglich ist. Im zb. ICOM Interface sind zb. die Timeouts
der Kommunikation einstellbar. Davon macht das IAVRootloader Interfcae
intern regen Gebrauch, da nur so sicherzustellen war das alle performant
und denoch stabil läuft.
Auch die einzelnen Protokollschritte des Bootloaders sind auf ein
serielles Protokoll, wie die RS232, aufsetzend. Ich denke aber das es
relativ einfach sein müsste auch auf USB aufsetzen zu können, Hauptsache
es ist ein serielles USB Protokoll, und das ist imer der Fall.
Denoch muß die überprüft werden und das geht im Grunde nur wenn man
erstens Ahanung vom USB hat und zweitens es praktisch auch versucht.
Gruß Hagen
Hallo Hagen,
hab gerade gesehen das der Bootloader in ASM ist.
Tja und ASM ist für mich nur kryptisch. Da ja die Komunikation nicht
über uart läuft müste also der Bootloader umgeschrieben werden und das
kann ich definitiv nicht in ASM.
Gerry
Ja der AVR Teil ist in Assembler, das ist eine zwingende Voraussetzung
wenn man sowas effizient haben möchte, bzw. das letzte Quentchen an
Optimierung haben möchte.
Die obige Vorgehensweise macht dann Sinn wenn man zb. per USB direkt
einen USB-Serial-Wandler ansprechen möchte. Auf AVR Seite hat man ja
sowieso alles auf RS232. Möchte man dies aber abändern dann muß man
natürlich auch den Assembler Source des Bootloaders anpassen. Das werde
ich aber mit Sicherheit nicht machen wollen ;)
Allerdings dürfte auch das garnicht mal so schwierig zu ändern sein, es
gibt defakto nur 3 Stellen im Source die angepasst werden müssten.
1.) Baudrate-Detektion gleich am Anfang im Source
2.) die Sub-Funktion getc() um ein Zeichen vom der RS232 zu lesen
3.) und putc() um ein Zeichen in die RS232 zu schreiben
Man könnte durch die Änderung der letzten beiden Punkte zb. auch die
HW-UART der AVRs benutzen, oder eben auf USB Hardware zugreifen, falls
sie im AVR vorhanden ist.
Gruß Hagen
Hagen Re wrote:
> Die obige Vorgehensweise macht dann Sinn wenn man zb. per USB direkt> einen USB-Serial-Wandler ansprechen möchte. Auf AVR Seite hat man ja> sowieso alles auf RS232. Möchte man dies aber abändern dann muß man> natürlich auch den Assembler Source des Bootloaders anpassen. Das werde> ich aber mit Sicherheit nicht machen wollen ;)
Nun bei mir läuft nichts über Uart :) Alles schön Parallel
>> Allerdings dürfte auch das garnicht mal so schwierig zu ändern sein, es> gibt defakto nur 3 Stellen im Source die angepasst werden müssten.> 1.) Baudrate-Detektion gleich am Anfang im Source> 2.) die Sub-Funktion getc() um ein Zeichen vom der RS232 zu lesen> 3.) und putc() um ein Zeichen in die RS232 zu schreiben>
Ja, ABER in ASM ;)
Kein Problem, werd wohl Ende der Woche meinen BL fertig haben.
Schade so erfindet man das Rad jedesmal neu.
>Kein Problem, werd wohl Ende der Woche meinen BL fertig haben.>Schade so erfindet man das Rad jedesmal neu.
Naja, es hängt halt von den Prioritäten ab die man sich setzt. Man hat
dann zwar zwei Räder aber für jeweils unterschiedliche Konzepte. Eine
wichtige Priorität in meinem Bootloader war es eben ihn sehr kompakt zu
bekommen und das geht mit zb. C eben längst nicht so kompakt wie in
Assembler. Ich habe bewusst den Punkt der Portierbarkeit, der Lesbarkeit
für viele Anwender, zurückgestellt. Das ist eben dann der Nachteil den
ich in Kauf nehmen musste. Ansich kein Nachteil für mich und dem Wunsch
im Hobby einen eigenen Bootloader zu haben. Aber eben für diejenigen
Nutzer denen ich im Nachinein frei den Bootloader zur Verfügung gestellt
habe und kein Assembler verstehen.
Gruß Hagen
tolle Arbeit!!!!!!!!!!!! richtig genial!!!!!!!!!!!
Nun zu meinem Problem. Habe einen ATMEGA162. Wenn ich die
Verschlüsselung deaktiviere also UseCrypt=0 dann kann ich den hex über
den Bootloader auf den ATMEGA162 flashen, wenn ich aber UseCrypt=1 setzt
und dann versuche die acy-Datei drauf zu flshen bringt er mir die
Meldung cmd.SetBuffer.ResCheck(2) Error: Decryption failed. Kann jemand
damit etwas anfangen?
Jo ich ;)
Wie hast du die ACY Datei erzeugt ? Normalerweise geht das so:
1.) AVR mit RS232 verbinden
2.) PC-Bootloader starten
2.1.) dort dein HEX als FLASH-File eintragen/Auswählen
2.2.) nun Compile Button drücken
2.3.) PC Software verbindet mit AVR und fragt somit alle Informationen
ab
2.4.) nun wird aus der HEX Datei eine ACY Datei erzeugt
2.5.) PC Software trennt sich vom AVR
So ist sichergestellt das das ACY File auch zum Bootloader im AVR passt.
Nur auf AVRs die den gleichen Bootloader installiert haben kann dieses
ACY installiert werden.
Wichtig dabei ist das das Passwort das die PC Software benutzt, steht
wenn man es möchte in AVRootloader.INI unter Password, identisch mit dem
Passwort in AVRootloader.ASM ist und diese ASM erneut auch compiliert
wurde.
Ich schätze das gerade letzeres bei dir nicht der Fall ist.
Also starte PC Software und drücke Button "Make Pasword". Danach erzeugt
die Software per Zufall ein 16 Bytes Schlüssel. Dieser wird in die
Zwischenablage kopiert, in die AVRootloader.INI gespeichert wenn du es
wünscht und auch sofort in die AVRootloader.ASM Datei geschrieben.
Danach mit AVRStudio diese AVRootloader.ASM erneut kompilieren und das
daraus entstehende HEX File auf den AVR installieren.
Sollte das Passwort der ACY Datei nicht identisch zum Passwort im AVR
sein, oder die verschlüsselten AVR-Device-Informationen im ACY File
nicht identisch zum Bootloader im AVR sein, dann tritt dieser Fehler den
du beschrieben hast auf.
Gruß Hagen
Ach und nochwas:
du hast die AVRootloader.ASM mit Verschlüsselung konfiguriert, also
UseCrypt=1
UseCryptFLASH=1
UseCryptEEPROM=1
UseSRAM=0
und ein neues Passwort erzeugt hast, per PC Software, und alles im
AVRStudio neu kompiliert hast.
Flashe nun AVRootloader.HEX in den AVR und setze die Fuses. Dann
startest du die PC Software und verbindest m it dem AVR -> Button
"Connect". Nun wählst du als FLASH File deine HEX Datei aus und drückst
den Button "Program". Die PC Software wird nun im Hintergrund erkennen
das der AVR nur mit Verschlüsselung programmierbar ist und somit dein
HEX File live im Hintergrund erstmal in eine im Speicher liegende ACY
Datei compilieren und diese dann flashen. Wenn das bei dir geht dann
hast du vorher mit falschen Passwörtern gearbeitet ;)
Gruß Hagen
ja die Postings habe ich gesehen, wie gesagt ohne Crypt geht alles nur
mit Encrypt geht nix.
Habe es genauso noch ein paar mal gemacht, er bringt immer den gleichen
Fehler. Psswort ist das gleiche, habe ich schon überprüft. Ich habe die
include m162def.inc ausgewählt.
Uff mal im Ernst, warum muß ich immer die Probleme Anderer lösen, geht
nicht gegen Dich oder Andere. Ist eher ne Frage das ich ein bischen
jammern möchte ;)
Also zeige mal den Anfang der Konfiguration der AVRootloader.ASM und
dann alles an Daten am Ende, also ab BootInfo: dieser Datei.
Könte es sein das du eine BootMsg, wie obem im Thread beschrieben,
benutzt ?
Achso, die Fuses sehen gut aus.
Gruß Hagen
>HAbe so gemacht und das hex ausgesucht, er hat nicht erkannt das es ein>hex ist und wieder die gleiche FEhlermeldung gebracht.
Doch hat er erkannt sonst würde im Log nicht dieser Fehler auftauchen.
Poste auch mal bitte den kompletten Inhalt des Log-Memos.
Gruß Hagen
@Luis:
>Man kann ja einen Bootstring angeben, der z.B die Hardwareversion>enthalten kann.>Wenn ich jetzt mit der DLL eine neue Software in den Controller laden>möchte, und der Bootstring nicht korrekt ist (z.B. falsches Gerät für>die Software), kommt bei mir keine Fehlermeldung, sondern es passiert>nichts.
Du könntest das aber jetzt schon ohne Änderungen an der Software machen.
Dafür gibt es zwei Wege:
1.) ohne Verschlüsselung:
Du benutzt für dein Gerät eine eigene BootVersion. Also in
AVRootloader.ASM die BootVersion verändern, auf größer 2. Nun startest
du die PC-Software, wählst dort dein HEX+EEP File für das Gerät aus und
kompilierst eine ACY-Datei. Wenn man eine ACY-Datei kompiliert dann
verbindet die PC-Software erstmal mit dem Bootloader im AVR und fragt
dort die BootInfo ab, also auch die BootVersion. Diese Daten stehen dann
im ACY-File und diese wird verteilt. Später programmiert man den AVR mit
dieser ACY-Datei und nur wenn die BootInfo im AVR identisch zu den Daten
im ACY-File sind kann diese den AVR programmieren.
2.) mit Verschlüsselung:
Du erzeugst für dein Gerät eine neue AVRootloader.ASM Datei mit einem
nur für diese Geräte gültigen Passwort, und Verschlüsselung ist
eingestellt. Dazu in der PC-Software den Button "Make Password" drücken
und das .ASM im AVRStudio erneut kompilieren.
Danach mit der PC-Software aus deinem HEX+EEP File eine ACY-Datei
erzeugen. Auch in diesem Moment steht im ACY die Kopie der BootInfo aus
dem AVR aber zusätzlich werden alle Daten mit dem Passwort
verschlüsselt. Diese ACY Datei kann dann später nur auf den Geräten
installiert werden die das gleiche Passwort benutzen. Zusätzlich können
deine Kunden nun über die PC-Software und voreingestellte Parameter (zb.
per Windows-Verknüpfung) in einem Rutsch diese verschl. ACY-Datei
programmieren. Aber nur du kannst, weil du als Einziger das Passwort
kennst, solche ACY-Dateien für deine Geräte erzeugen. ABER! beachte das
du in diesem Fall keine BootMsg: benutzen darfst, sonst geht das mit der
Verschl. nicht.
Gruß Hagen
Danke Hagen, es lag an der BootMsg! Habe ich jetzt raus gemacht und es
geht! Es soll nicht nur bei danke bleiben. Möchte dich für deine
Bemühungen entschädigen. Ich schreib dir gleich ne PN
Hallo Hagen,
hab heute Deinen Bootloader mal ausprobiert und habe keine Problem damit
gehabt. Compiliert, gelinkt, geflasht und dann gebootloaded ... Einfach
klasse!
Vielen vielen Dank für Deine Arbeit!
Beste Grüße,
Michael
Hallo Hagen,
ich versuche deine AVRootloader.dll mit einem VB Express Programm
anzusprechen.
Die DLL kann ich wie folgt einbinden.
1
Public Declare Function OpenAVRootloader Lib "AVRootLoader.dll" Alias "OpenAVRootloader" () As String
Das Programm meldet mir aber sobald ich die Funktion verwende einen
Fehler.
Ich weiß nicht genau was oder ob die Funktion von dir was zurück gibt.
und was ich ihr übergeben muss.
Hast du vielleicht eine Schnittstellenbeschreibung zu der DLL?
Ich glaube das würde auch anderen helfen, die versuchen mit VB, C/C++
oder C# usw. die DLL anzusprechen.
Ich kann leider überhaupt kein Delphi.
Vielleicht kannst du auch kurz erläutern wie die prinzipielle
Vorgehensweise bei der Initialisierung der Verbindung ist.
MfG Andy :)
PS: Der Bootloader ist echt klasse. Auch die Anleitung wie man ihn
benutzt und einrichtet.
So wie du das versucht hast kann das nicht funktionieren.
Diese Funktion erwartet ein Interface und gibt auch ein Interface
zurück. Das sind ähnliche "Datenstrukturen" wie Objekte, genauer gesagt
sind es Schnittstellen von Objekten. Dafür gibt es einen Standard von MS
damit eben verschiedene Programmiersprachen über diesen Weg kompatibel
sein können.
Leider kenne ich mich in diesem Fall nur mit Delphi/PASCAL sehr gut aus,
vielleicht noch ein bischen C. Aber wie es heutzutage in VB, ergo BASIC
geht weiß ich leider auch nicht.
Ein erfahrener Programmierer in VB und Delphi sollte in der Lage sein an
Hand der AVRootIntf.pas Source diese zu portieren.
Die einzigen beiden normal exportierten Funktionen in der DLL sind also
Funktionen die solche Interface-Objekte erzeugen und zurückgeben. Die
eigentliche Schnittstelle steckt dann als Methoden in diesen Interfaces.
Deren Deklaration, also Namen, Typen, Parameter, Rückgabewerte und
Aufrufkonventionen (stdcall, cdecl usw.) kann man in der AVRootIntf.pas
Source nachlesen. Dieser Source ist damit auch die Dokumentation der
DLL.
Gruß Hagen
Ok danke.
Ich hab in der VB Hilfe auch schon was zu diesen Interface Typen
gefunden.
Ich werds einfach weiter versuchen.
Wenn ich was zustande bekomme werde ich berichten.
Grüße
Melde dich per PN bei mir, einfach auf den blauen Namen klicken bei
meinen Postings.
Ein bischen kenne ich mich ja schon mit VB aus und somit könnte ich dir
helfen bei der Translation nach VB. Ich habe es halt nicht installiert
und normalerweise rücke ich auch nur Sourcen raus die ich auf
Korrektheit verifiziert habe. Per EMail könnten wir quasi gemeinsam am
Problem arbeiten, bis es läuft. So hätte auch ich einen Vorteil dabei.
Gruß Hagen
Hallo Hagen,
Ich habe eben Deinen Bootloader in der Version vom 19.9.08 (soviel ich
gesehen habe die aktuellste) auf einem Crumb256 Modul von chip45
getestet.
Ich muss sagen, das ist der erste Bootloader der auf Anhieb bei mir
gelaufen ist, alle Achtung!
Der Crumb256 hat ja bereits einen FTDI-Chip mit drauf der auf USART0
verdrahtet ist. Ich habe also Deinen Code einfach auf die dem USART0
zugeordneten Pins auf Port E, Pins 0 und 1 geändert und siehe da,
funktioniert.
Aber ein kleines Poblem ist noch aufgetaucht:
Vorsichtshalber hatte ich zunächst in AVRootloader.exe nur 38400 Baud
ausgewählt. Das Programmieren des Flash-Speichers klappte auch
problemlos, nur das Auslesen des EEPROMs oder SRAMs endete immer mit der
Fehlermeldung "Cmd.ReadEeprom.ReadByte(1) ICOM: read error" bzw.
"Cmd.ReadRam.ReadByte(1) ICOM: read error".
Versuche mit dem Parameter Base in "AVRootloader.ini" und verschiedenen
Baudrates ergaben, dass die Defaulteinstellung "Base = 50" nur für
115200 Baud passt, dann funktioniert alles fehlerfrei.
Wenn ich aber z.B. nur mit 38200 Baud arbeiten will, muss ich Base
deutlich erhöhen. Mit 100 funktioniert's sicher, die genaue Grenze habe
ich nicht ermittelt.
Gruß Gerd
Je geringer die Baudrate desto höher sollte der Wert in Base sein. Dies
ist das Basistimeout zum Warten auf 1 ASCII Zeichen beim Empfang über
die Schnittstelle. Intern werden die Timeouts aus der Baudrate
errechnet, allerdings ohne die Berücksichtigung der eventl. zusätzlichen
Timeouts die durch den USB und dessen Treiber entstehen. Deren
Berechnungsmethoden sind nicht öffentlich und höchstwarscheinlich von
Hersteller zu Hersteller auch noch unterschiedlich.
Letzendlich wird man über die Parameter in der INI einen Kompromiß für
die eigene Hardware/Treiber Kombination finden müssen der einerseits die
Gesamtperformance des Bootloaders nicht so sehr negativ beeinflusst und
andererseits die Stabilität des Bootloaders (Anzahl Timoutfehler)
negativ beeinträchtigt. Ich bevorzuge natürlich die Stabilität und
Zuverlässigkeit statt die um par Bruchteile einer Sekunde schnellere
Programmierzeiten.
>Fehlermeldung "Cmd.ReadEeprom.ReadByte(1) ICOM: read error" bzw.>"Cmd.ReadRam.ReadByte(1) ICOM: read error".
Exakt diese Fehlermeldungen beeinflußt man über den Wert Base in der INI
Datei. Sie entstehen weil die PC-Software voeher ein Kommando an den AVR
gesendet hat und nun auf eine Antoert vom AVR warten muß. Minimal wartet
die PC-Software den Wert in Base in Millisekunden oder die Zeitspanne
die sich aus der Baudrate und der Übertragung von 1 ASCII Zeichen
ergäbe.
Gruß Hagen
Hallo Hagen !
Erstmal dickes lob für den AVRootloader ! Ist echt spitze !
Ich hab ein kleines Problem bei der Implementierung eines anderen Icom
Interfaces !
Und zwar will ich auf einen ftdi232 per D2xx-Treiber zugreifen.
Ich komme aber mit der einbindung als ICom nicht ganz klar !
Wie genau muß ich denn die funktion Opencommunication in der AVRootinf
anpassen bzw. wie kann ich die neue funktion richtig einbinden.
Delphi meldet mir immer:
Error: Application.OpenCommunication provides no communication interface
Die Funktion zum öffnen der Kommunikation über D2xx hab ich übrigens aus
den Delphi-Quellen auf der Homepage von FTDI (D2xxappl.pas)!
Wäre klasse wenn du oder jemand anderes eine Antwort hätte !
Gruß Stefan
function ReadCRC(const ProcName: WideString = ''): Bool; stdcall;
44
end;
Natürlich implementierst du alle Methoden durch.
2.) du stellst ja eine IApplication Schnittstelle zur Verfügung, als
ebenfalls ein Object wie zb. ein TForm das die IApplication
implementiert. Deren Methode function OpenCommunication: ICOM; stdcall;
sähe dann so aus:
1
function TForm1.OpenCommunication: ICOM;
2
begin
3
Result := TCOM.Create('COM1', Self);
4
end;
Obiges TCOM Objekt ist ein Copy aus meinen internen Sourcen zum Zugriff
auf die RS232.
3.) falls du Fragen bzgl. den Methoden, Parameter und Arbeitsweise der
ICOM Methoden hast, dann frag.
Gruß Hagen
Hallo Hagen !
Danke für die schnelle und ausführliche Antwort !
Leider hab ich tatsächlich ein paar Verständigungsprobleme bezüglich der
ICom-Schnittstelle !
Wenn ich das richtig interpretiert habe setzt deine TCom Methode auf der
Icom Methode auf und führt den Verbindungsaufbau zum AVR anschließend
über deine Dll aus, oder ?!
Vielleicht habe ich mich auch nicht richtig ausgedrückt:
Für den FTDI gibt es zwei Arten von Treiber. Einen der die
Com-Schnittstelle emuliert (benutze ich bisher und funktioniert soweit
gut) und einen proprietären USB-Treiber der eine Eigene dll für den
Verbindungsaufbau mitbringt. Dieser enthält bereits Methoden um eine
Verbindung zum FTDI aufzubauen (allerdings nicht über eine
Com-Schnittstelle, sondern über zb. die ID des FTDI).
Ich habe mir das so vorgestellt das ich die Verbindung zum FTDI über die
Dll von FTDI herstelle und die Datenübertragung dann von deiner dll
ausführen lasse. Oder habe ich da einen Denkfehler drin ?
Ich hab als anhang mal den Delphi-Source von FTDI angehängt aus dem ich
die Datenverbindung übernommen habe.
Ich kann mir gut vorstellen das du genug zu tun hast, aber vielleicht
findest du ja mal die Zeit einen Blick darein zu werfen und mir
vielleicht einen anhaltspunkt zu geben wie ich das implementieren kann.
Ich werde es auf jedenfall weiter versuchen und wenn ich eine Lösung
gefunden habe diese auch weitergeben da es bestimmt genügend Leute gibt
die Ihren AVR per USB(FTDI) ansteuern möchten.
Ich bin natürlich trotzdem über jeden Hinweis dankbar !
Gruß Stefan
Hi Stefan,
als erstes vorweg: möchtest du mit geringsten Aufwand arbeiten dann
benutze den Virtuellen COM Port Treiber den der FTDI liefert. Dann musst
du diesen nur im System installieren und kannst sofort mit dem
bestehenden AVRootloader damit arbeiten, also ohne irgendwelche
Programmierung.
Die Frage ist eben was für Vorteile du dir durch die direkte Ansteuerung
des FTDIs auf Windows Seite erhoffst. Schneller als der viruelle COM
über RS232 wirds wohl nicht gehen (denke ich zumindest) und der Aufwand
den virtuellen COM Port Treiber im System zu instalieren (ohne brauchst
du ja nur die FTDI-DLL) ist auch nicht so enorm.
Die Schnittstellen des AVRootloaders bestehen aus vier Interfaces:
IApplication, muß durch den Benutzer (also dir) implementiert werden.
Par Postings weiter oben findest du einen Delphi Source der das
demonstiert.
ICOM, das ist die native Schnittstelle zum eigentlichen
Kommunikationstreiber unter WIndows. Für den Zugriff auf RS232 = COM
Schnittstellen habe ich schon alles implementiert. Für den direkten
Zugriff auf zb. deine FTDI-DLL musst du diese ICOM Schnittstelle durch
ein eigenes Objekt implementieren. Eine beispielhafte Deklaration eines
solchen Objektes habe ich im vorherigen Post schon aufgezeigt (meine
Implementierung für die RS232).
IAVRootloader, ist der eigentliche Bootloader Code. Dieser greift auf
das übergebene IApplication Interface zu um zb. Parameter, Einstellungen
und Ausgaben im eigenen GUI zu machen. Desweiteren fragt er das
Kommunikations-Interface = ICOM Objekt bei IApplication ab und benutzt
dieses um mit der eigentlichen Kommunikationshardware zu reden.
IDevice, ist ein Sub-Interface von IAVRootloader und nur eine
Strukturierung der vielen Methoden des Bootloader Interfaces. IDevice
stellt quasi gruppiert alle Informationen zum verbundenen AVR dar.
Schau dir also mal meine Beispiel-Anwednung par Postings weiter oben an.
Dann beginnst du deine eigenes ICOM Objekt zu bauen und gibts es statt
dem Aufruf OpenCOM() als Resultat in deiner IApplication Schnittstelle
bei der Methode .OpenCommunication() zurück.
Gruß Hagen
Hallo Hagen !
Der Hauptvorteil soll eigentlich darin liegen das ich keine virtuellen
Com-Ports mehr benutzen muß, sondern die angeschlossenen AVR's über ihre
ID identifizieren und direkt ansteuern kann. Bei den virtuellen
Com-Ports ist oftmals das Problem, das sich die Portnummer ändern und du
nacher 10 reservierte Com-Ports im System hast und außerdem nicht mehr
weißt unter welchem Comport der AVR jetzt zu erreichen ist !
Ich werde mich jetzt mal nen bißchen mit der ICom auseinandersetzen !
Danke und Gruß
Stefan
implementiert.
Ist das so richtig ?
Was bedeutet 'const ProcName: WideString ' ? bzw was muß ich hier
übergeben ?
Außerdem bekomme ich bei
FWCRC: TCRCDef;
FRCRC: TCRCDef;
eine Fehlermeldung über nicht definierte Variablen !
Gruß Stefan
> ist das so richtig ?
Ja.
> Was bedeutet 'const ProcName: WideString ' ?> bzw was muß ich hier übergeben ?
Musst du nicht benutzen, ist nur für eine gezieltere Fehlerbehandlung
nötig.
Zb. hat die ICOM Schnittstelle die Methode:
ReadByte(CRCFlags, ProcName);
und wird in verschiedenen higher-Level Funktionen des IAVRootloader
Interfaces benutzt. Zb. so
Res := FCOM.ReadByte([], 'Cmd.ReadEeprom.ReadByte(3) ');
19
except
20
on E: ECOMReadError do Res := Buf[0]
21
else raise;
22
end;
Falls also TCOM.ReadByte() einen Fehler meldet, Timeout oder so wird
.ReadByte() eine Exception auslösen und in dieser wird der Wert in
ProcName als Message mit eingebaut. Sowas geht mit anderen Sprachen wie
.NET und C# schon automatisch, allerdings erzeugen die auch einen
trace-baren Aufrufstack und mit Delphi erzeugt man optimierten Nativcode
der durch die Registeroptimierung der Parameter oft ohne Stack auskommt.
Ergo denke ich pragmatisch und baue so einen Paramater ein, im Hobby
kann man ja so vorgehen.
> Außerdem bekomme ich bei FWCRC: TCRCDef; FRCRC: TCRCDef;> eine Fehlermeldung über nicht definierte Variablen !
Ähm, du hast ja nicht meinen vollständigen Source und damit auch nicht
meine Unit CRC.pas.
Das Beste wird es sein du schickst mir einen PN oder lädst dir von hier
http://www.michael-puff.de/Developer/Delphi/Importe/Hagen_Reddmann/ mein
Delphi Encryption Compendium. In diesem enthalten ist meine CRC.pas
Unit, kannste sowieso immer gebrauchen da sie alle Cyclic Redundance
Checksum unterstützt.
Gruß Hagen
Nochwas, wir betrachten mal
FCOM.WriteWord($0500 + Pages, [crcReset, crcSend], '');
Das sendet das Kommando zum EEPROM schreiben. Die CRCFlags bedeuten nun
folgendes:
1.) crcReset, setzt die FWCRC: TCRCDef Struktur zurück, also resetet die
Schreib CRC auf $0000. Und das bevor die CRC über die Bytes $05 $00
gesendet werden.
2.) nun wird das Byte $05 und ($00 + Pages) gesendet über COM und auch
darüber die FWCRC updated.
3.) crcSwend bedeutet das WriteWord() als letztes die berechnete CRC
über COM sendet
In Summasumarum werden also 4 Bytes gesendet
$05 = Kommando Write Eeprom
Pages = Anzahl zu schreibender Pages
CRC = CRC16
CRC
Die zu programmierenden Daten wurden schon vor diesem Kommando in den
SRAM Buffer im AVR geschrieben und ebenso die Anzahl der Bytes die in
diesem Buffer gültig sind. Ebenso die Addresse an die diese Daten
geschriben werden sollen.
Angenommen man hat vorher mit dem SetBuffer() Kommando also die
Datenbytes $FF $FF $FF $FF gesendet und möchte nun aber mit dem
WriteEeprom Kommando ($05) aber 512 Bytes im Eeprom schreiben dann würde
man einfach das Kommando
$05 $80 crc crc
absetzen.
Die Sequenz um ab Addresse $012345 512 Bytes mit $FF im Eeprom zu
befüllen sähe also so aus
1.) SetAddr() -> $FF $01 $23 $45 crc crc
2.) SetBuffer() -> $FE $00 $00 $04 crc crc $FF $FF $FF $FF crc crc
3.) WriteEeprom() -> $05 $80 crc crc
Jedesmal wenn die CRC gesendet wurde wird sie neu initialisiert.
SetAddr() benutzt 24 Bit lineare Addressen, egal ob SRAM/EEPROM/FLASH
gelesen/geschrieben wird.
Das erste Byte ist immer das Kommando. Verschiedene Kommandos bestehen
aus 2 oder 4 Bytes + 2 Bytes CRC danach. Also auch die Kommandos sind
mit CRC separat abgesichert. Je nach Kommando werden danach entweder
weitere Daten gesenedet oder empfangen oder das Kommando ist schon
fertig, arbeitet also ohne Daten. Falls Daten gesendet oder empfangen
werden so sind diese ebenfalls mit der 16 Bit CRC abgesichert.
Tjo, soweit zum grundsätzlichen Aufbau der Kommando/Daten des
Protokolles.
Übrigens alles ist Big-Endian !!
WriteWord($FF00) sendet also $FF $00
WriteLong($01020304) sendet $01 $02 $03 $04
Gruß Hagen
Es wird schnell ersichtlich das man mit der obigen Methode den
Kommunikationsaufwand reduzieren kann. Ich hatte mal eine Testversion
meiner PC-Bootloader-Software geschrieben die die zu programmierenden
Daten für den FLASH und EEPROM nach sich wiederholenden Sequenzen
analysierte und dann mit der obigen Methode quasi eine Komprimierung
durchführte. Solange man viele solcher Sequenzen hat konnte man 25-50%
an Kommunikation damit einsparen. Leider zeigte aber die Realität, also
normale Programme für AVRs, das man dieses Ratio eben nicht erreichen
kann. Also habe ich in der aktuellen Version der PC-Software darauf
verzichtet und benutze diese Feature nur mein zb. Löschen des EEPROMs.
Die ansosten einzige Optimierung in dieser Richtung ist beim Schreiben
des FLASHs. Sollten dort komplette Pages im HEX auftauchen die alle mit
$FF gefüllt sind so werden diese nur durch ein EraseFlash() Kommando
programmiert. Auch dieses Kommando -> $02 Pages crc crc, kann mehrere
Pages am Stück löschen.
Gruß Hagen
Hallo Hagen,
habe ein Problem mit dem AVRootloader,
ruft man das Prg. per Komandozeile auf funktioniert es nicht
wenn im Pfad ein Leerzeichen ist (oder bin ich zu dumm ? )
z.B. -Dc:\programme\avr tools\ -Ftest.hex ergibt
c:\programme\avr\test.hex
koenntest du das bitte pruefen & event. beheben ? vielen Dank !!!
vlg
Charly
@Charly:
Uff, das ist so ein Feature von Delphis RTL das ich schon seit langem
hasse. Es kann solche Parameter nicht korrekt auswerten, Leerzeichen
stellen einen Separator zwischen mehreren Parametern dar.
Das müsste ich definitiv im Source ändern, wird aber dann heissen das
ich die Kommandozeile aufwendig von Hand parsen müsste, statt eben auf
fertige Funktionen der RTL zurück zu greifen.
Vorerst musst du den Ordner umbenennen zb. in avr_tools, also mit
Unterstrich statt Leerzeichen.
Mal sehen, es könnte demnächst sowieso eine Version 3.0 kommen.
Gruß Hagen
Mal ne kleine Umfrage meinerseits.
Was für Erweiterungen und Verbesserungen schweben euch noch vor ?
- Versionsverwaltung der geflashten Software
- Updates überprüfen diese Versionsnummer
- diese Versionsnummer wird nur bei Verschlüsselung überprüft, also
durch den AVR selber mit verschlüsselten Daten. Manipulationen sind
ausgeschlossen. Dieses Feature würde nur vorhanden sein bei aktvierter
Verschlüsselung. Nur dort macht es auch kryptographisch einen Sinn,
alles andere wäre nur informativ. Das bedeutet das im vorgefertigten und
verschlüsselten ACY File die Versionsnummer der verschlüsselten HEX
Datei gespeichert wird. Im ACY File steht das alles geschützt drinnen.
Diese Daten werden beim Kunden zum AVR gesendet und dieser überprüft die
aktuell installierte Version mit der gerade empfangen Versionsnummer.
Nur wenn es eine neuere Version ist wird eine Programmierung des FLASHs
zugelassen. Die Versionsnummer könnte in den letzten Zellen im
Anwendungs-FLASH gespeichert werden, quasi so wie der Einsprungsvektor
bei den kleinen AVRs. Es würden also zb. 4 Bytes vom Anwendungs-FLASH
weniger zur Verfügung stehen.
- Bug beseitigen mit der BootMsg: im Zusammenhang mit der
Verschlüsselung
- Bug beseitigen mit der Kommandozeile
- Autodetektion des COM Ports bzw. Serielle Schnittstellen
- separate Bootloader-EXE die nur vorgefertigte ACY Dateien
programmieren kann, quasi die jetzige Bootloader Software in
abgespeckter Version. Dafür enthält diese EXE, quasi wie ein
selbstextrahierendes ZIP, schon die ACY Datei.
- Auswahlbox für das BootSign: in die PC-Software integrieren. Welchen
Sinn hat das ? Nun, wenn man den Bootloader auf 1-Wire benutzt dann kann
man jetzt schon mehrere AVRs am gleichen 1-Wire-Bus auf einer Platine
verdrahten. Werden diese mit dem Bootloader programmiert, benutzen aber
alle eine andere BootSign: dann kann man mit der PC-Software über einen
Draht alle AVRs programmieren. Man könnte also zb. 10 baugleiche AVRs
auf einer Platine per 1-Wire-Bus verbinden. Alle benötigen im Grunde die
gleiche Anwendungssoftware. Man muß also nur 10 Versionen von
AVRootloader.ASM komplieren mit jeweils anderen BootSign: zB. BOOT00 bis
BOOT09. Dann programmiert man diese 10 unterschiedlichen Bootloader in
diese AVRs. Danach kann man sie alle über die PC-Software programmieren.
Entweder indem man diese 10 BootSign in einer Auswahlbox von Hand
auswählt und dann jeden AVR einzeln programmiert oder aber die
PC-Software geht automatisch alle Einträge in dieser Auswahlbox durch
und versucht alle mit der gleichen Software zu programmieren.
- bitte keinen Vorschlag wie "Terminal" integrieren ;)
Gruß Hagen
@Henry:
>"" ?>-D"c:\programme\avr tools\"
Nee geht nicht, habs sicherheisthalber probiert. Um eine Änderung im
Source, wie oben beschrieben käme ich also nicht rum. Nur kann ich dann
ja gleich alles richtig machen, statt mit Tricks zu arbeiten. Ist halt
schade das das es die Delphi RTL nicht gleich richtig macht.
Gruß Hagen
Hallo Hagen !
Hab mir deine CRC.pas runtergeladen und integriert.
Implementieren muß ich hier aber nichts weiter, da die Funktionen
bereits in der ICom implementiert sind, oder ?!?
Außerdem hab ich noch ein paar Fragen:
Die d2xx.dll besitzt keine Flush funktion, dafür aber Purge_Buffer_In
und Purge_Buffer_Out. Welche muß ich hier verwenden und wie kann ich die
Flush Funktion Implementieren.
Außerdem ist keine Echo Funktionalität vorgesehen. Wird diese zwingend
benötigt ?
Und zu guter Letzt noch die drei Proceduren ReadCrc,WriteCRC und
ResetCRC.
Hier stehe ich momentan leider komplett auf dem schlauch was die
Implementierung angeht.
Zur Version 3.0:
Die Idee mit der Versionsnummer finde ich super !
- Autodetektion des COM Ports bzw. Serielle Schnittstellen
Wie stellst du dir das vor ? Einfach das alle Ports die im System
vorhanden sind und genutzt werden im Programm aufgelistet werden(hab ich
bei mir schon implementiert), oder willst du ne erkennung einbauen an
welchem ComPort der AVR hängt ?
Ansonsten weiterso und nochmal Danke für deine wirklich ausführliche
Hilfe!
Gruß Stefan
Die .Flush() Funktion sollte beide Buffer vollständig senden oder
empfangen, nicht Purgen.
1
procedure TCOM.Flush;
2
begin
3
if FHandle <> 0 then
4
FlushFileBuffers(FHandle);
5
end;
versuche es mal mit einer Leermethode also ohne Implementierung.
> Außerdem ist keine Echo Funktionalität vorgesehen. Wird diese zwingend> benötigt ?
Würde ich einbauen, da nicht sooo schwierig. Alle Methoden die mit
.Read??? und .Write??? beginnen landen intern immer bei .ReadData() und
.WriteData()
Also nur in diesen beiden Methoden findet die komplexere Komunikation,
CRC Berechnung und auch der EchoMode statt.
Bei .EchoMode=TRUE musst du also in .WriteData() nur exakt die Bytes
wieder sofort einlesen die du gesendet hast und verwerfen, überprüfen
mit den gesendeten Bytes.
> ... ReadCrc,WriteCRC und ResetCRC.
Ganz einfach:
1
procedure TCOM.WriteCRC;
2
var
3
CRC: Word;
4
begin
5
CRC := CRCDone(FWCRC);
6
InternalWriteData(@CRC, SizeOf(CRC)); // WriteData() ohne CRC berechnung
7
CRCDone(FWCRC);
8
end;
9
10
procedure TCOM.ResetCRC;
11
begin
12
CRCDone(FWCRC);
13
CRCDone(FRCRC);
14
end;
15
16
function TCOM.ReadCRC(const ProcName: WideString): Bool;
17
begin
18
ReadWord([], ProcName);
19
Result := CRCDone(FRCRC) = 0;
20
end;
>..Autodetektion des COM Ports bzw. Serielle Schnittstellen>Wie stellst du dir das vor ?
1.) alle COM Ports im System ermitteln, samt FriendlyName, also sowas
"COM4: Bluetooth serieller Kommunikationsanschluß"
2.) COM Port ComboBox wird umgebaut zu einer reinen DropDown Liste. Also
keine manuelle Eingabe eines COM Ports merh möglich. Zusätzlich wird es
in dieser Liste einen Eintrag wie "AUTO" geben. Ist dieser ausgewählt so
versucht die Software bei einem Connect() alle in der Liste vorkommenden
Ports anzusprechen und mit einem evntl. angeschlossen AVR zu
kommunizieren. Das geht natürlich nur dann wenn der AVR aus der
Anwendungssoftware in den Bootloader gesprungen ist. Dazu gibt es
mehrere Möglichkeiten:
a) man überwacht per PinChange den Bootloader-RX/1-Wire-Pin und springt
dann aus der PinChange-ISR direkt in den RESET Vektor zum Bootloader
oder benutzt den WatchDog um einen RESET auszulösen. Oder man benutzt
den RTS Pin der RS232, konfiguriert in der .INI Datei das Verhalten der
RTS Leitung entsprechend und verbindet die RTS Leitung mit RESET am
Board oder legt sie an einen extra Pin am AVR der wiederum mit
PinChange-ISR überwacht wird.
Wichtig bei dieser Auto-Detektion des Ports ist es also das der AVR in
den Bootloader springt auf Verlangen der PC-Software. Ansonsten muß man
permanter den RESET-Taster.
Gruß Hagen
@JoJo:
Warum dann aber nicht auf den Wert in BootSign: in der Applikation
reagieren ?
Die PC-Software sendet bei einem Connect() wiederholt den Wert
0x00,0x00,0x00,0x00, "BOOT"
bzw. das was in BootSign: drinnen steht, bis
a) der Bootloader reagert mit einer Rückmeldung
b) der Connect() Versuch in der PC-Software manuell beendet wird
c) eine gewisse Anzahl von Connect() Versuchen abgelaufen ist (* neue
Version wird das so machen müssen wenn sie ein AUTO Connect()
durchführt)
Desweiteren muß klar sein das die Baudrate stimmen muß. Die eigene
Anwendung hängt also am UART und erwartet eine Kommunikation mit der
richtigen Baudrate, ganz im Gegensatz mit dem Bootloader der eine
Baudrate-Detektion besitzt.
Ich denke also das dein angedachtes Feature schon jetzt mit dem
Bootloader geht, du musst nur richtig konfigurieren ;)
Der Connect() ist ein zeimlich Timining kritischer Prozess, sowohl im
AVR wie auch auf PC Seite.
gruß Hagen
Hallo Hagen,
das habe ich auch gedacht und schon probiert.
Gescheitert bin ich aber daran dem AVRootloader
im Sign=BOOT den Code für <LF> einzufügen.
In meinem Fall ist der Befehl zum Einsprung in den Bootloader
auch etwas länger als 4 Zeichen z.B.: ":System:Firmware:Update".
Dadurch würde dann der Bootloader unnötig aufgebläht.
Ich habe mir bisher mit einer Batchdatei geholfen.
Das klappt aber je nach Rechner und Auslastung mehr schlecht als recht.
Zuverlässiger ist dann zuerst den AVRootloader zu starten,
aber nicht "Connecten" und dann den Batch zu starten.
Das ganze ist auch als Wunsch für die neue Version zu verstehen.
Ich bin mit dem Loader bisher auch prima klargekommen.
Danke für Deine Arbeit.
JoJo
@Jojo,
Du möchtest also in der PC-Software das sie bei einem Connect folgendes
macht
1.) einen konfigurierbaren String über RS232 senden
2.) eine kurze Zeit warten
3.) mit der bisherigen Vorgehensweise weitermacht
Hm, könnte ich so ändern wenn du dich bereit erklärst diese neue Version
speziell auf dieses Feature hin zeitnah zu testen ;-)
Gruß Hagen
Genau.
Ob die Wartezeit zwischen 1) und 3) notwendig ist kann ich zur Zeit
nicht beurteilen.
Da dieses Feature nicht jeder braucht sehe ich auch kein Problem darin,
das in der "Ini"- Datei zu "verstecken". Ist ein Eintrag vorhanden dann
wird dieser String einmalig gesendet. Wenn nicht dann nicht.
Ob und wie man in diesen String Steuerzeichen (Escape-Sequenzen, CR, LF
etc.) mit einbauen kann ist mir noch nicht ganz klar.
Zum Testen: Kein Problem wenn mich nicht gerade der Grippevirus
erwischt.
Gruß JoJo
>Ob und wie man in diesen String Steuerzeichen (Escape-Sequenzen, CR, LF>etc.) mit einbauen kann ist mir noch nicht ganz klar.
Kommt eh, auch für die BootSigns als ESCaped Sequence. Etwa so
Test/0a/0dString//
eräbe dann
test
<lf><cr>
String
/
> das in der "Ini"- Datei zu "verstecken"
nur so geplant.
Gruß hagen
@JoJo: hier zum Testen ;)
@Andere:
neuste Version 3.0, was hat sich geändert ?
- Versionsverwaltung für eure eigene Software in AVRootloader.ASM
eingebaut. Die Versionsnummer ist 4 Bytes groß und wird in den letzten 4
Bytes im Anwendungsflash gespeichert. Bei AVRs mit Bootsektion exakt die
4 Bytes vor BootStart, also letzten 4 Bytes des nutzbaren FLASHs für
eure Anwendung. Bei AVRs ohne Bootsektion steht in den letzten 2 Bytes
der JMP zu Main. Deshalb steht die Version in den 4 Bytes davor. Ihr
könnt also in eurer Software per LPM auf diese Versionsnummer zugreifen.
Der Bootloader sendet diese Versionsnumer beim Connect zur PC-Software.
Diese stellt die Versionsnummer im "Device Information" Fenster dar. In
AVRootloader.ASM könnt ihr per UseVersioning=1 die Versionsverwaltung
aktivieren. Wird die Verschlüsselung als Updatemöglichkeit benutzt kann
bei einem Update eurer AVRs mit einem kompiliertem ACY File eine
Versionsnummernprüfung erfolgen. Dabei vergleicht der Bootloader im AVR
die im ACY verschlüsselt gespeicherte neue Versionsnummer mit der
aktuell installierten Versionsnummer. Ist die neue kleiner als die alte
wird ein Fehler zurückgemeldet und der AVR kann nicht programmiert
werden. In der PC-Software sind 4 Eingabefelder in denen ihr eure
Versionsnummer eingeben könnt die bei der Kompilation einer ACY Datei
benutzt werden soll. Über die "Verify Mask" könnt ihr bestimmen welche
Teile der Versionsnummer im AVR überprüft werden sollen. Somit könnt
ihr ein "Back-Update" des AVRs durchführen indem ihr einfach eine ACY
Datei kompiliert und alle 4 Checkboxen abhackt. Diese Versionsverwaltung
ist kryptographisch sicher, also nur ihr als Besitzer des Paßwortes
bestimmt das Verhalten der Versionsverwaltung. Alle Daten sind
verschlüsselt, sowohl in der erzeugten ACY Datei wie auch bei der
Datenübertragung zum AVR. Nur der Bootloader im AVR entschlüsselt und
vergleicht diese Versionsnummern. Diese geschützte Versionsverwaltung
funktioniert beim Schreiben des FLASHs wie auch EEPROMs. Dafür muß aber
die zwingende Verschlüsselung des FLASHs und EEPROMs in AVRootloader.ASM
aktiviert sein.
- Autodetektion der COM Ports auf dem PC. Dabei werden die installierten
und verfügbaren COM Ports im System ermittelt und mit ihren FriendlyName
angezeigt.
- Autodetektion des COM Ports an dem der Bootloader angeschlossen ist.
In der COM Port Auswahlliste einfach "AUTO" auswählen. Diese könnt ihr
auch in der Kommandozeile nutzen. Ist AUTO gewählt und es wird eine
Verbindung aufgebaut dann versucht die PC-Software jeden COM Port in der
Auswahlliste. Die Anzahl der Trials bei diesem Versuch pro COM Port kann
in der AVRootloader.INI -> [System] -> ConnectTrials=? eingestellt
werden. Damit dies aber funktioniert muß euer Gerät autom. in den
Bootloader wechseln können. Es gibt mehrere Wege, zb. PinChange ISR am
RX Pin des Bootloader, oder RTS-Leitung der RS232 am RESET des AVRs und
RTSPulse/RTSInterval in AVRBootloader.ini entsprechend konfiguriert.
- Neu ist die Möglichkeit das die PC-Software bei der Verbindung einen
definierbaren String sendet. Eure Anwendung im AVR, die selber die UART
benutzt, kann diesen Befehl dann benutzen um in den Bootloader zu
springen. Dazu konfiguriert ihr in AVRootloader.INI -> [System] ->
AppCmd= . Der Wert in AppCmd kann Sonderzeichen enthalten zb. so
AppCmd=RunBoot/0ATest//
Ein Backslash mit anschließend einem HEXadecimalen Wert, immer zwei
Zeichen lang. Ein Doppelslash hebt den ESCapecode auf.
VORSICHT! ihr könnt nicht das Zeichen #13 -> /0D benutzen, leider. Das
liegt daran das die Baudrate Detection im Bootloader dieses
Sonderzeichen auswertet. Wollt ihr es denoch benutzen so müsst ihr den
Bootloader ohne "Baudrate Detection" konfigurieren, also mit fest
eingestellter Baudrate (was meistens dann auch Sinn macht).
- Auswahlbox für das BootSign in PC-Software eingebaut. Man kann, wenn
man 1-Wire Kommunikation benutzt, alle AVRs eines Gerätes am gleichen
1-Wire-Pin verdrahten. Alle AVRs, können unterschiedliche Typen sein,
benutzen den AVRootloader. Nun kann man mit der PC-Software all diese
AVRs updaten.
- Fehler beim Auswerten der Kommandozeile beseitigt, Leerzeichen im Pfad
wurde als Separator erkannt.
- Fehler bei der BootMsg beseitigt. Die BootMsg wurde in AVRotloader.asm
verschoben und kann nun auch mit der Verschlüsselung benutzt werden.
- Der Wert im Eingabefeld "ACY Info" in der PC-Software wird beim
Kompilieren einer ACY Datei in diese lesbar gespeichert. Neben diesem
Wert auch die lesbare Versionsnummer. Mit einem einfachen Texteditor
kann man diese Infos aus einer ACY Datei auslesen.
- Kompatibilität zum Bootloader Version 1 und 2 sollte gewährleistet
sein.
- einige kleinere Darstellungsfehler beseitigt
- alle Dateien wie AVRootloader.dev und AVRootloader.ASM wurden auf die
neusten AVRs aktualisiert (AVR Studio 4.15 Build 623)
- neuer Parameter -SBOOT für die Kommandozeile eingebaut, damit kann man
das BootSign für den Bootloader-Connect vorgeben
- für diejenigen die die AVRootloader.DLL benutzen. Diese ist nicht
kompatibel zur alten Version !
Testen konnte ich das Ganze zZ. nur auf einem ATmega162, also mit einem
AVR mit Bootsektion. Es wäre lieb wenn einer, der zZ. mit einem ATTiny
den Bootloader benutzt, die neuste Version testet. Speziell BootMsg,
UseVersioning mit/ohne Verschlüsselung, danke.
Gruß Hagen
Hallo Hagen,
das ging ja fix.
Hier mein vorläufiges Ergebnis: ES KLAPPT, aber...
- Anzeige der verfügbaren Schnittstellen: Com2 erscheint 4mal (siehe
Bild)
- Beschreibung für AppCmd in Bootloader.txt: Backslash soll Slash heißen
- AppCmd wird jetzt immer vor Bootsign gesendet.
Ich bin von einmalig AppCmd und anschließend "unendlich oft" BootSign
ausgeganngen. So stört es aber auch nicht.
(Evtl. währe ein Parameter wie bei RTSInterval möglich - muss nicht)
Mein Wunsch ist damit zur vollsten Zufriedenheit erfüllt.
Besten Dank für Deine Arbeit.
JoJo
@JoJo:
> Anzeige der verfügbaren Schnittstellen: Com2 erscheint 4mal
Echt blödes Betriebssystem. Tja was kann ich tun, ich weiß es nicht !
Denn es scheint keine Methode zu geben die gerade im System aktiven
Schnittstellen mit ihrem FriendlyName abfragen zu können. Ich habe nun
mittlerweile 4 verschiebene Vorgehensweisen zur Ermittlung der aktiven
COM Ports implementiert und getestet (alle aus dem WEB, zb. MSDN) Keine
hat davon richtig funktioniert, also habe ich mir selber eine
zusammengestrickt. Ich gehe nur über die Registry. Das Problem ist nun,
ich kann zwar ermitteln welche COM Ports im System aktiv sind, aber ich
kann deren eindeutigen FriendlyName nicht ermitteln. So wie bei dir,
kann es vorkommen das über einen längeren Zeitraum verschiedene
Installationen erfolgten. Oder das zb. ein USB-Seriell-Wandler an
verschienden USB-Hubs angeschlossen wurde. Jedesmal kann dann der
gleiche COM Port für ein anderes Gerät benutzt werden. Diese Infos
stecken in der Registry und ich lese sie aus. Dummerweise weiß ich zwar
das es einen aktiven COM2 im System gibt (auch aus der Regustry) kann
aber die möglichen installierten Treiber/Geräte aber nur über den
Portnamen zuordnen. Installierte Treiber können es aber eben mehrere zu
einem Port sein, welcher davon aktiv ist kann man nicht aus der Registry
auslesen, bzw. ich habe keinen Trick im WEB dafür gefunden.
Ich bin kurz davor alles wieder umzubauen auf mein altes GUI, dh.
FriendlyName wieder aus der Anzeige raus zu nehmen. Denn was nützt es
wenn man den COM2 zb. dreimal sieht, mit drei unterschiedlichen
FriendlyNames, und damit dann doch wieder keinerlei sinnvolle
Information mehr hat welches Gerät nun real angeschlossen ist.
> AppCmd wird jetzt immer vor Bootsign gesendet.
Ja, ich dachte mir das dies der beste Kompromiß ist. Denn es könnte ja
sein das die Applikation selber nicht beim ersten Senden von AppCmd
richtig reagiert. Für meinen Bootloader im AVR ist dieses AppCmd egal,
solange AppCmd kein #13 enthält und nichts mit BootSign überreinstimt !!
Ich habe diese Änderung ja nur für dich, als bisher einzigen Nutzer,
eingebaut.
Gruß Hagen
Mir würde es schon reichen wenn nur die vorhandenen Schnittstellen in
der Liste auftauchen. In meinem Fall also Com1 bis Com4, egal wie die
sonst noch genannt werden. Hauptsache in der Liste sind keine ComPorts
vorhanden, die nicht im System vorhanden sind.
Viele Programme zählen einfach Com1..Com255 in der Liste auf. Ist ja
auch am einfachsten.
Ich habe übrigens mit einem Mega168 getestet.
JoJo
Ich habe den Friendlyname der COM Ports wieder rausgenommen.
Es gibt keine Methode die Liste der aktiven COM Ports (aus der Registry)
mit der Liste der möglichen COM Ports + FriendlyName zu synchronisieren.
Auf meinen Rechnern ist die Registry und Installationen sauber, deshalb
tratt dieses Problem so nicht auf.
Zusätzlich habe ich einen weiteren Parameter für die Kommandozeile
eingebaut, Parameter -V. Dieser setzt die Daten für die
Versionsverwaltung. Das könnte so aussehen
-V0102F01A0F
Daraus wird Version 1.2.240.26 und alle Verify Checkboxen angehackt. Der
letzte 2 Zeichen HEXadezimal Wert im Parameter gibt die Bitkodierung
dieser Checkboxen vor.
Gruß Hagen
Hallo Hagen !
Für die Comports hab ich dir ne Routine, funktioniert bei mir
einwandfrei !
Nur die Friendlynames sind nicht eingebaut, aber das ist für dich sicher
nen klax !
1
function StrX(const Trenner:Char; s:string; x:integer):string; //Sucht X-ten String in s
2
var sl:TStringList;
3
begin sl:=TStringList.Create;// Die Liste nimmt die einzelnen Strings auf
4
// siehe Online.Hilfe ExtractStrings (so kommen die Strings in sl
5
// -1 weil jede sl mit 0 beginnt
6
if ExtractStrings([Trenner],[' '],PChar(s),sl)>= x-1 then
7
// z.B. Leerzeichen am Anf.ignorieren Quelle Liste
if (not Success) and (GetLastError = ERROR_INSUFFICIENT_BUFFER) then
46
begin
47
GetMem(PortsPtr, BytesNeeded);
48
try
49
Success := EnumPorts(
50
nil,
51
1,
52
PortsPtr,
53
BytesNeeded,
54
BytesNeeded,
55
Returned);
56
57
for I := 0 to Returned - 1 do
58
begin
59
InfoPtr := PPortInfo1(DWORD(PortsPtr) + I * SizeOf(TPortInfo1));
60
TempStr := InfoPtr^.pName;
61
if Copy(TempStr, 1, 3) = 'COM' then //begin //Hier ist der Filter angegeben, der nur ComPorts ausgibt
62
if ComDa((StrX(#58,TempStr,1))) = true then
63
ComboBox1.Items.Add(StrX(#58,TempStr,1)); //Strings in einer TComboBox hinzufügen
64
// end;
65
end;
66
finally
67
FreeMem(PortsPtr);
68
end;
69
end;
70
if not Success then MessageBox(Handle, 'Die COM-Port-Liste konnte nicht erstellt werden.', PChar(Application.Title), MB_OK or MB_ICONWARNING);
71
end;
Vielleicht klappt es ja damit ! Hab ich auch irgendwo aus dem internet !
Ansonst mal wieder respekt wie schnell du sowas umsetzt !
Coole Sache !
Gruß Stefan
Hello Hagen,
I am sorry but I do not speak German language. For a few days (weeks) I
am looking for suitable AVR bootloader with TEA (XTEA) encryption. Your
bootloader is realy the best I have seen till now. I have tried it for a
few hours on ATMEGA128. Transfers to flash with or without encryption
worked well on uprocessor in STK500 behaind HW COM. In my application I
use Lantronix XPORT, on PC I have installed virtual COM. Where is my
problem: When I transfer file without encryption, LAN connectivity
switches on and file is transfered well. Everything is all right. But
when I try to transfer encrypted file, bootloader is connected, LAN is
connected too, but LAN activity is not blinking and bootloader is
"working". Have you ever tried this kind of transfer? What can be wrong?
Thank you for your shareing of code, it had to take much time and much
work.
Best regards
Petr
Hi Petr,
i know less about you special hardware setup, it is very uncommon to me.
To get more information i need some error protocol output from my
bootloader software. Normaly the connection process is always the same,
even if cryptography is used. I do not see any point why it should
differently work with and without cryptography. The only suggestion, or
even my opinion, where that the XPORT LAN-protocol, to transfer the
virtual COM port data, must be wrong or probable the timing is quit
different. Try to increment the values in AVRootloader.ini in section
[Timeouts], especialy value for Base. But iff you get no
correspondending error messages, eg. timout errors in my bootloader
software this suggestion would by pretty useless.
Best regards, Hagen
Hi Hagen,
if AVRootloader is in state "working" it is impossible close the window
of loader. I was waiting for long time and after it I obtained protocol
I enlose:
20.01.09-07:19:38-441 > Connecting on port COM4...
20.01.09-07:19:38-551 > Switch to 2-Wire mode
20.01.09-07:19:38-671 > Device connected
20.01.09-07:19:41-976 > Program...
20.01.09-07:19:41-976 > execute compiled data
20.01.09-07:19:41-976 >
$70,$06,$C8,$F7,$06,$AD,$AE,$04,$EE,$83,$3D,$81,$50,$3F,$31,$DC 1.0.0.1
20.01.09-07:19:41-976 > selected options in compiled file:
20.01.09-07:19:41-976 > - programming FLASH
20.01.09-07:19:41-976 > - FLASH data are encrypted
20.01.09-07:26:07-020 > Cmd.SetBuffer.ReadByte() ICOM: read error.
During state "working" I can not see any activity on the line. I will
try to catch start of the communication to the terminal and after it I
will be back here. Increasing of timeout has no influence to the result.
Regards
Petr
Hallo Hagen !
Hab auch nochmal nen bißchen gesucht und hab diese Seite gefunden:
http://www.delphipraxis.net/topic140097,0.html
(COM Ports im System auslesen)
Die benutzt zwar die Jedi winApi.dll, dafür scheint aber alles zu
funktionieren ! zeigt bei mir nur verbundene, vorhandene Com-Ports incl.
FriendlyName an !
Gruß Stefan
@Stefan,
danke dir, kannte ich aber schon und habe alle Methoden probiert. Der
Weg übers SetupAPI funktioniert leider nicht richtig. Also das was es
anzeigt ist zwar richtig (aktive Ports und FriendlyName) aber es zeigt
nicht alle aktiven Ports im System an. Zb. mit Bluetooth und USB Wandler
soll es ein Problem haben. Kann man irgendwo bei MSDN nachlesen.
Meine obige gepostete Methode funktioniert sehr gut, solange man keine
Friendlynames benötigt. Und mit der letzten Version benötige ich sie
auch nicht mehr, da dieses Feature raus ist.
Der Trick mit dem testweisen Öffenen des COM Ports ist absolut nicht das
was ich möchte. Es kann durchaus sein das ein COM Ports durch eine
andere Anwendung geöffnet ist und diesen Port möchte ich denoch in der
Liste anzeigen.
Grundsätzlich sehe ich es im Hobby nicht ein den "Mist" den andere
Entwickler verzapft haben ausbessern zu wollen. Dazu ist mir, und vielen
anderen Benutzern des Bootloaders, dieses Feature einfach zu unwichtig.
Wenn man sich mal den Aufwand, nur par COM Ports im System zu ermitteln,
anschaut dann ist dieser nicht gerecht fertigt. Ein vorausschauender
Systementwickler berücksichtig im Besonderen die Useablity dessen was er
erschafft für die darauf aufsetzenden Entwickler. So entsteht ein gutes
OS und kein MS-Windows. Es ist Aufgabe vom OS solche Daten sauber und
möglichst einfach abfragbar zur Verfügung zu stellen. Wenn aber für
diese Abfrage ein 250-Zeiler benötigt wird dann stimmt da was am Konzept
und Umsetzung des OS nicht. Nun, und ich werde mich nicht hinsetzen,
viel Zeit verschwenden, um diese Schwachstelle auszubügeln.
Ergo: AVRootloader zeigt keine Friendlynames an, fertig, Thema
abgegessen ;)
Sorry musste aber mal Luft raus lassen.
Gruß Hagen
@Hagen
Vielen Dank für dieses Update. Super!
Ich hätte aber noch eine Anregung an das Optische. Ist zwar nicht so
wichtig aber durchaus nützlich. Und zwar eine Fortschrittsanzeige.
Natürlich wenn der Aufwand dafür nich zu groß ist.
Hallo Hagen !
Ist doch kein Problem, wenn man die FriendlyNames nicht gescheit
einlesen kann ist das ja nun wirklich nicht dein Problem. Da hast du
absolut recht !
Für mich ist das Feature sowieso eher nebensächlich !
Ich kämpfe ja immernoch mit der TCom Implementation ! :-)
Du hast geschrieben das die neue AVRootloader.dll nicht mehr zur alten
kompatibel ist ! Betrifft das auch meine TCom Function oder hat das
ausschließlich mit der Versionsabfrage zu tun ?
Übrigens: Tolles Update !! Die Version 3.0 gefällt mir sehr gut !
Gruß Stefan
Hallo Hagen,
super Projekt! Ich würde Deinen Bootloader auch gerne einsetzen, aber da
muss ich wohl eine Änderung vornehmen und möchte im Vorfeld fragen, ob
Du das für machbar hältst:
Ich möchte den Bootloader per DMX-Schnittstelle nutzen, d.h. vor dem
UART des Controllers sitzt ein RS485 Pegelwandler (Standardteil). Rx und
Tx sind seperat angeschlossen, allerdings muss ich nun den Pegelwandler
von Empfangen auf Senden umstellen können. Reicht das in deinem Code an
ein/zwei Stellen die entsprechenden Ports zu setzen, oder wird das
Deiner Meinung nach ein größeres Unterfangen???
MfG, roeben
@Stefan:
>Du hast geschrieben das die neue AVRootloader.dll nicht mehr zur alten>kompatibel ist ! Betrifft das auch meine TCom Function oder hat das>ausschließlich mit der Versionsabfrage zu tun ?
Ja und Nein ;) Einfach die AVRootIntf.pas bei dir neu einbinden als
Header. Es betrifft das IApplication Interface (muß weitere Parameter
zurückliefern) und den TTimeout Record, enthält ebenfalls neue Felder.
Allerdings, schäm mich :( habe ich schon wieder par kleinere
Veränderungen am Bootloader gemacht. Diesen werde ich nach einer
gewissen Wartezeit hier ebenfalls veröffentlichen. Es nutzt ja nichts
das Forum wegen par unwichtigen Änderungen ständig voll zu müllen. Ich
warte also noch ab ob irgendwelche Fehler oder Verbesserungswünsche
eintrudeln und veröffentlich dann die neuste Version.
Essentiell gehts um das XPORT Problem vom Petr. Ich denke das der XPORT
mit großen Datenpacketen ein Problem hat. Also wurde mein AVRootloader
dahingehend geändert das man die maximale Packetgröße der
Datenübertragung konfigurieren kann.
@roeben:
>Ich möchte den Bootloader per DMX-Schnittstelle nutzen, d.h. vor dem>UART des Controllers sitzt ein RS485 Pegelwandler (Standardteil). Rx und>Tx sind seperat angeschlossen, allerdings muss ich nun den Pegelwandler>von Empfangen auf Senden umstellen können. Reicht das in deinem Code an>ein/zwei Stellen die entsprechenden Ports zu setzen, oder wird das>Deiner Meinung nach ein größeres Unterfangen???
Sollte sehr einfach gehen:
1.) vor der Baudrate Detektion, also gleich am Anfang auf Empfang
stellen
2.) bei putc: nach den rcall waitf auf Senden stellen
3.) bei getc: die erste schleife leicht abändern und auf Empfang
stellen. Hier sollte der rjmp getc auf eine neue Addresse nach deinem
Umstellen auf Empfang zeigen
etwa so:
1
putc: rcall waitf
2
rcall waitf
3
sbi RS485_PORT, PinRX_TX
4
ldi cnt, 10
5
com paral
1
getc: cbi RS485_PORT, PinRX_TX
2
get0: rx_1
3
rjmp get0
und am Anfang des Booloaders vor
1
cbi RS485_PORT, PinRX_TX
2
sbi RS485_DDR, PinRX_TX
3
4
.if UseAutobaud
5
; baudrate detection
6
abd: ldi cmdl, byte3(BootDelay / 6)
Das dürfte es gewesen sein. Ich bitte dich um zwei Dinge
1.) baue deine Änderungen, wenn sie so funktionieren sollten, per
DEFINES und bedingter Comilierung in den AVRootloader.ASM ein. Also wie
bei RX_PORT/TX_PORT/RX/TX zwei neue Defines. Die obigen Änderungen,
falls sie funktionieren dann per bedingte Compilerswitches einbauen. Und
finally UseRS485 als Compilerswitch.
2.) veröffentliche deine Änderungen, wenn sie denn funktionieren, bitte
hier im Forum oder maile sie mir, das ich sie übernehmen kann. So haben
alle was davon.
Gruß Hagen
@Hagen: Hab gerade die Test-Dll vom AVRootloder 3.0 getestet !
Leider bekomme ich mehrere Fehler:
[Fehler] Unit1.pas(43): E2003 Undefinierter Bezeichner: 'GetAppCmd'
[Fehler] Unit1.pas(43): E2003 Undefinierter Bezeichner: 'GetAppVersion'
[Fehler] Unit1.pas(43): E2003 Undefinierter Bezeichner: 'GetACYInfo'
[Fehler] Unit1.pas(43): E2211 Deklaration von 'OpenCommunication'
unterscheidet sich von der Deklaration in Interface 'IApplication'
Gruß Stefan
Datei AVRootIntf.pas mal anschauen, das sind die besagten Änderungen.
Das was ich dir per Mail geschickt habe ist alles auf diese neue Version
compiliert. Du musst also nur deine Sourcen updaten.
Gruß Hagen
@Stefan:
jetzt hab ichs kapiert ;) Du musst in deiner Application natürlich diese
neuen Methoden des Interfaces auch deklarieren und implementieren. Dh.
in deinem TForm hast du als Schnittstelle IApplication angegeben, hast
aber diese neuen Methoden nicht im TForm deklariert. Der Compiler
meckert es also an. Die function OpenCommunication(Index: Integer):
ICOM; stdcall; hats einen neuen Parameter Index um die Autodetektion des
COM Ports zu realisieren. Index beginnt dabei immer bei 1 und zählt
hoch, so lange bis der IAVRootloader eine Verbindung herstellen konnnte
oder aber die Methode .OpenCommunication() den Rückgabewert auf nil
setzt, eg. Result := nil;
Meine .OpenCommunication sieht also so aus:
1
function TMainForm.OpenCommunication(Index: Integer): ICOM;
2
var
3
PortName: String;
4
begin
5
Result := nil;
6
if AnsiCompareText(Port, 'AUTO') = 0 then
7
begin // Auto Detection
8
if Index >= CBPort.Items.Count then
9
begin
10
Output('Error: no Device found', ocError);
11
Exit;
12
end;
13
PortName := CBPort.Items[Index];
14
try
15
Result := OpenCOM('\\.\' + PortName, Self);
16
except
17
Output(Format('Info: can not open port %s', [PortName]), ocInfo);
18
raise EAbort.Create('');
19
end;
20
end else
21
begin // one COM Port is selected
22
if Index > 1 then Exit;
23
PortName := Port;
24
try
25
Result := OpenCOM('\\.\' + PortName, Self);
26
except
27
raise Exception.CreateFmt('Error: can not open port %s', [PortName]);
28
end;
29
end;
30
try
31
Result.SetParams(Baudrate);
32
except
33
raise Exception.CreateFmt('Error: can not setup baudrate to %d', [Baudrate]);
34
end;
35
Output('Connecting on port ' + PortName + '...', ocInfo);
Hallo Hagen !
Danke für die erklärung der OpenComunication Function ! jetzt bin ich
schon wieder nen bißchen weiter ! :-)
Aber was ich eigentlich gemeint habe waren nicht die Sourcen die du mir
gemailt hast, sondern die Test-Dll aus dem AVRootloader.Zip !
Da hast du zwar die Anpassungen bezüglich der Ausgabe der Versionsnummer
usw. gemacht, aber die Implementierung der GetAppVersion usw. wohl nicht
vervollständigt ?! Ich kann Sie bei mir auf jedenfall nicht kompilieren
ohne besagte Fehlermeldungen !
Gruß Stefan
Hallo in die große Runde,
erstmal ein großes Lob für diesen super Bootloader! Respekt!
Nun zu einem kleinen Problem was ich habe.
Ich habe hier einen Attiny45 mit der neusten AVRootloader Version den
ich per 1-Wire (PB3) flashen möchte. Das funktioniert auch ohne Probleme
mit der in der pdf gezeigten Schaltung. Nun möchte ich aber einen FTDI
benutzen.
Ich habe dafür entsprechend im Bootloader folgende Zeile angepasst und
neu geflashed.
.equ UartInvert = 1
Bei der Schaltung habe ich einfach die Dioden entfernt. RX hängt also
direkt an PB3 und TX über den 2k Widerstand auch an PB3.
Nun leider funktioniert die Kommunikation gar nicht. Auf dem Oszi konnte
ich nach erstem Test keine Antwort des Tiny sehen. Irgendwann ist der
Pin dann einfach ein Ausgang und HIGH.
Meine zweite Frage wäre noch, wie die Verschaltung aussehen müssten,
wenn man mehrere Controller programmieren möchte. Das Vorgehen mit dem
BootSign hab ich verstanden.
Ich würde mal vermuten, dass vor jeden uC mit einem Widerstand am
1-Wire-Bus hängt oder? Sonst könnten sich die Controller ja gegenseitig
kurzschließen.
Vielen Dank!
PS: Danke nochmal für die tolle Software!
Grüße
Nachtrag:
Also ich hab folgendes probiert: UartInvert = 0 und mit der FTDI
Software eingestellt, dass die TX/RX Leitungen invertiert werden sollen.
Es klappt sofort!
Kann es sein, dass es dann ein Softwarefehler ist, wenn UartInvert = 1
und 1-Wire-Mode gleichzeitig an sind?
>Kann es sein, dass es dann ein Softwarefehler ist, wenn UartInvert = 1>und 1-Wire-Mode gleichzeitig an sind?
Denke ich nicht, es müsste funktionieren. Definieren wir erstmal:
- RX_out ist Output des FTDI für die empfangenen Daten
- TX_in in Input des FTDI für die zu sendenden Daten
Serienwiderstand 2k zwischen RX_out und TX_In. TX_In an AVR Pin.
Nun liegt bei 1-Wire, bei keiner Aktvität immer der Pullup nach VCC am
Pin an. Durch die Verschaltung am FTDI zieht aber RX_out über den 2K den
TX_In auf LOW Pegel.
Schaue also mal ob dein 2k Serienwiderstand in der richtgen Leitung ist.
Ich habe aber selber noch nicht diese Kombination getestet und es könnte
also durchaus sein das es damit noch Softwareprobleme gibt.
Wenn du mehrere AVRs über 1-Wire programmieren möchtest dann sollte
UartInvert=0 sein.
Jeder AVR könnte aus Sicherheitsgründen einen Serienwiderstand von zb.
220-470 Ohm am Pin haben, je nach VCC.
Normalerweise sollten die sich aber nicht in die Query kommen wenn alle
Bootloader der AVRs im definierten Zustand sind, dh. sie warten alle
erstmal das Connect Commando ab.
Wenn nun die AVRs alle unterschiedliche BootSign: haben dann reagiert
immer nur derjenige AVR der mit der jeweiligen BootSign: angesprochen
wurde, alle anderen AVRs lauschen nur auf der Leitung. Es gibt aber
denoch das Problem das durch dummen Zufall, während gerade ein AVR
programmiert wird, die Connect Sequenz im Datenstrom auftauchen könnte.
Somit würde ein zweiter AVR in die bestehende Verbindung zwischen
funken. Man sollte also die BootSign: der AVRs möglichst lang wählen und
so das die Wahrscheilichkeit das diese als Daten im normalen Datenstrom
vorkommen sehr gering ist.
Angenommen die BootSign's benutzen nur Großbuchstaben, sind 8 Zeichen
lang dann beträgt die Wahrscheinlichkeit für eine Fehldetektion 1 zu
229607785695641627262976 = 256^5 * 26^8. 256^5 für die ersten 5 Bytes ->
0x00,0x00,0x00,0x00,0x0D gefolgt von den 8 Buchstaben der Bootsign.
Alles bezogen auf die Übertragung von 13 normalen Datenbytes im
Datenstrom = 20282409603651670423947251286016 mögliche Kombinationen.
Die Bootsign der AVRs selber sollten sich stark voneinander
unterscheiden.
Die Bootloader Software ist im Grunde nicht dafür konstruiert worden,
ich weiß aber das es real funktioniert und wie man sieht ist es auch
bischen Wahrscheinlichkeitsrechnung ;)
Gruß Hagen
Hallo Hagen,
danke für deine ausführliche Antwort.
>- RX_out ist Output des FTDI für die empfangenen Daten>- TX_in in Input des FTDI für die zu sendenden Daten
Finde ich persönlich verwirrend, da RX für receive und TX für transmit
steht. D.h. RX ist der Empfangspin des FTDI und der TX der Sendepin des
FTDI. Bezogen auf den zweiten Kommunikationspartner genau umgekehrt,
aber das ist ja erstmal Konventionssache.
Der Widerstand ist in der Sendeleitung des FTDI, er verhindern ja z.B.
dass ein Kurzschluss entsteht, wenn der Tiny grad Sender ist. Tiny z.B.
High und FTDI Low. Passt soweit auch von der Schaltung. Einen
Pullupwiderstand gibt es ja gar nicht (abgesehen vom internen Pullup der
ja bestimmt aktiviert ist, wenn der Tiny Empfänger ist). Habe den
Nachmittag ein bisschen getestet und der Tiny meldet sich einfach nicht
im 1-Wire Modus mit aktivierter Invertierung.
Aber mit der Invertierung der Signale im FTDI klappt ja alles wunderbar.
>Normalerweise sollten die sich aber nicht in die Query kommen wenn alle>Bootloader der AVRs im definierten Zustand sind, dh. sie warten alle>erstmal das Connect Commando ab.
Das müsste aber voraussetzen, dass der Tiny Pin im Hauptprogramm nur als
Eingang genutzt wird oder? Weil wenn das BootSign keine Übereinstimmung
findet, laden die Tinys ja das Hauptprogramm und wenn dort eben der Pin
ein Ausgang ist, funken alle anderen uC dem einen der geflasht werden
soll in die quere. Oder wird der Bootvorgang angehalten, wenn ein
Connect Commando erkannt wurde, das BootSign aber nicht stimmt?
Die Sache mit den langen BootSigns ist ein guter Tip! Vielleicht mache
ich mal einen Testaufbau. Gibt es eigentlich eine Beschränkung in der
Zeichenanzahl des BootSign?
Nette Grüße
Mark
>Gibt es eigentlich eine Beschränkung in der Zeichenanzahl des BootSign?
ja, 256 Zeichen. 256 deshalb weil der Zähler beim Senden/Empfangen ein
8Bit Register ist. Würde man dies auf 0 setzen == 256 mod 256, dann kann
man 256 Zeichen als Maximalanzahl betrachten.
> Finde ich persönlich verwirrend, da RX für receive und TX für transmit
Ich habe in der Benamung nur die Sendrichtung mit angegeben, ergor
stimmen unsere Sichtweise ansonsten überein. Da ich aber weiß das hier
desöfteren Interpreatationsfehler gemacht werden, wollte ich nur sicher
gehen.
probiere mal folgende Modifikation:
Hallo Hagen !
Hab jetzt erstmal die Anbindung des FTDI per D2xx.dll auf Eis gelegt.
Ich bekomme trotz identischer Implementierung der vorhandenen FT_W32
functionen immernoch, für mich unerklärliche, Fehlermeldungen. Außerdem
funktioniert die Einbindung über VCP-Treiber ja zufriedenstellend.
Einziger Wehrmutstropfen war die fehlende automatische Erkennung des
richtigen Devices, die ich ja jetzt durch den Anmeldestring ersetzten
kann.
Damit wären wir dann bei meinem nächsten Problem. Da die Test-Dll
veraltet ist fehlt mir die Implementierung der neuen Funktionen.
Könntest du die wohl hier posten oder mir als PN zukommen lassen ?!
Ich habe übrigens noch einen Verbesserungsvorschlag für die
AVRootloader.asm ! Kannst du die so verändern, das bei aktivierter
Versionsverwaltung automatisch die Verschlüsselung aktiviert wird ?
Damit bin ich nämlich erstmal ganz schön auf die Schnautze gefallen !
:-)
(Ja ja, wer nicht lesen kann und so...)
Gruß Stefan
Hab gerade ein riesen Problem mit der Versionsüberprüfung !!
Immer wenn ich die Option im AVR aktiviere bekomme ich keinen Connect
mehr !!
Hab schon alle möglichen Konfigurtionen ausprobiert, auch
unterschiedliche BootSize und BootReset. Alles andere funktioniert
einwandfrei, nur wenn ich die Versionsprüfung aktiviere geht nichts mehr
!!
Irgendwelche Vorschläge ???
Gruß Stefan
@Hagen
Danke für die Modifikation! Kann ich aber erst in ca. einer Woche
testen, da ich jetzt erstmal eine Woche nicht mehr zu Hause bin. Melde
dann aber wies aussieht.
Grüße Mark
@Stefan:
>Hab gerade ein riesen Problem mit der Versionsüberprüfung !!>Irgendwelche Vorschläge ???
Welcher AVR, welche Konfiguration ?
Das Versioning funktioniert mit und ohne Verschlüsselung. Aber nur mit
aktivierter Verschlüsselung wird ein Update an Hand seiner
verschlüsselten neuen Versionnummer in der ACY Datei auch überprüft.
Ohne Verschlüsselung ist das Versioning ein informativer Wert, muß also
manuell verifiziert werden und kann jederzeit auch downgraded werden.
>Ich habe übrigens noch einen Verbesserungsvorschlag für die>AVRootloader.asm ! Kannst du die so verändern, das bei aktivierter>Versionsverwaltung automatisch die Verschlüsselung aktiviert wird ?
Also nein ;) da je nach Konfiguration so mehrere Möglichkeiten
entstehen.
Gruß Hagen
> Welcher AVR, welche Konfiguration ?
Atmega8, und an der Konfiguration hat sich nichts geändert zum
AVRootloader2 ! Habs mit und ohne Autobaud, mit und ohne Verschlüßelung,
usw. probiert ! Der AVR hängt übrigens an nem FT232R !
> Das Versioning funktioniert mit und ohne Verschlüsselung.
Dann hab ich das wohl falsch verstanden ! :-)
> Also nein ;) da je nach Konfiguration so mehrere Möglichkeiten> entstehen.
Hat sich ja dann auch erledigt, da es ja auch ohne Verschlüßelung
funktioniert ! Hatte halt die Verschlüßelung in Verdacht weshalb das bei
mir nicht funktioniert! Muß aber wohl woanders dran liegen !
Ich werde nacher nochmal nen paar Tests machen !
Gruß Stefan
Hallo Hagen !
Also hab mal noch nen paar Tests gemacht !
Ergebnis beim Versioning bleibt das gleiche ! Sobald es aktiviert ist
kein Connect.
Dann hab ich mal unter AppCMD einen Wert =Test eingegeben. Ergebnis:
Kein Connect !!!
Also schließe ich daraus das die Probleme irgendwo in der kommunikation
mit dem FTDI liegen müßen, da du und auch andere Benutzer anscheinend
keine Probleme haben !
Gibt es jemanden hier der den neuen AVRootloader zusammen mit einem FTDI
erfolgreich betreibt ?
Hab schon nen bißchen mit den Timeouts gespielt, leider ohne Ergebnis !!
Werde jetzt mal ne alte schaltung mit RS232 raussuchen und da mal
testen.
Gruß Stefan
@all
Also erstmal entwarnung was den FTDI angeht ! Der hat damit nichts zu
tun !
@Hagen
Das problem liegt beim irgendwo beim Reset des AVR ! Wenn ich per Hand
einen Reset ausübe(was in meiner Schaltung leider nicht verbaut ist)
bekomme ich problemlos einen Connect. Ohne den Reset bekomme ich keine
Verbindung !
Konfig:
- ATMega8 mit 10 MHZ-Kristall
- Nur der Rootloader installiert !
- Bootsize und Bootreset sind programmiert
- mit und ohne Autobaud getestet
Ohne Versioning und AppCmd klappt der Connect immer, mit einem der
beiden aktiviert geht nichts mehr !
Woran kann das liegen ?
Gruß Stefan
@Stefan:
benutze mal die Version im Attachment. Setze in AVRootloader.INI den
Wert in [System] -> Debug=1.
Mache einen Connect und schaue im Protokol nach was beim Wert "Received:
" angezeigt wird.
Je nach Konfiguration den AVRootloader.ASM sollte folgendes angezeigt
werden (in HEX)
1.) ohne Versioning, ohne BootMsg
4 Bytes BootInfo, 1 Byte SUCCESS Code $3x wobei X die Features anzeigen
2.) mit Versioning, ohne BootMsg
4 Bytes BootInfo, 4 Bytes Version ($FF,$FF,$FF,$FF bei ungeflashten
AVR), 1 Byte SUCCESS Code
3.) ohne Versioning, mit BootMsg
x Bytes BootMsg immer gerade Anzahl Bytes, 4 Bytes BootInfo, 1 Byte
SUCCESS Code
4.) mit Versioning, mit BootMsg
x Bytes BootMsg, 4 Bytes BootInfo, 4 Bytes Version, 1 Byte SUCCESS
- wenn die BootMsg definiert wurde dann wird sie immer als erstes
gesendet
- wenn es eine Version gibt dann wird sie als letztes gesendet und er
SUCCESS Code muß >= $38 sein, Version ist immer 4 Bytes, und bei AVRs
ohne geflashte Anwednung immer $FF,$FF,$FF,$FF
- BootInfo wird immer dazwischen gesendet und ist 4 Bytes
Der SUCCESS Code ist immer $30
+ $08 wenn UseVersioning = 1
+ $04 wenn UseCryptE2 = 1
+ $02 wenn UseCryptFASH = 1
+ $01 wenn UseCrypt = 1
Das System in der PC-Software geht nun so vor:
Warte auf Zeichen von RS232 bis Timeout von [Timeouts].Base eintritt.
Solange kein Timeout Fehler baue einen String aus allen empfangenen
Zeichen auf.
Nach einem Timeout zeige bei [System].Debug=1 in INI Datei den
empfangenen Sring HEX-formatiert im Protocol Fenster an.
Analysere nun diesen String:
- steht am Ende ein gültiger SUCCESS Code ?
- ist der SUCCESS Code mit UseVersiong konfiguriert ? wenn ja
vorhergenenden 4 Bytes als Verson interpretieren und wegschneiden, wenn
neun nur SUCCESS Code wegschneiden.
- nun stehen am Ende 4 Bytes an BootInfo, auswerten und auf
Plausibilität prüfen und wegschneiden.
- nun ist dieser String entweder leer oder enthält die BootMsg.
Gruß Hagen
Hallo Hagen
hab das mal alles der Reihe nach durchprobiert !
> 1.) ohne Versioning, ohne BootMsg>> 4 Bytes BootInfo, 1 Byte SUCCESS Code $3x wobei X die Features anzeigen
$93 $07 $03 $10 $37
> 2.) mit Versioning, ohne BootMsg>> 4 Bytes BootInfo, 4 Bytes Version ($FF,$FF,$FF,$FF bei ungeflashten> AVR), 1 Byte SUCCESS Code
nur recieved: !! hier findet auch vorher kein switch to 2-wire mode..
statt
> 3.) ohne Versioning, mit BootMsg>> x Bytes BootMsg immer gerade Anzahl Bytes, 4 Bytes BootInfo, 1 Byte> SUCCESS Code
abwechselnd:
recived: $C2 $C2 $C2
recived: $C2 $C2
egal was ich bei AppCmd eingebe !
> 4.) mit Versioning, mit BootMsg>> x Bytes BootMsg, 4 Bytes BootInfo, 4 Bytes Version, 1 Byte SUCCESS
wieder abwechselnd:
recived: $C2 $C2 $C2
recived: $C2 $C2
habs mit und ohne AutoBaud versucht ! Und hab auch mal den Timeout enorm
erhöht (500 !), gleiches Ergebnis !
Kannst du damit was anfangen ?
Gruß Stefan
$C2 = ERRORCRC, der AVR Bootloader scheint also zu antworten was
bedeuten würde das er schon längst in der Command FSM läuft, also
connected ist.
Probiere mal als AppCmd
1.)
AppCmd=/00/00/00/00
2.)
AppCmd=test/00/00/00/00
wir senden also par Nullen mehr, also Kommando "Restart Bootloader".
Du kannst auch längere Sequenzen aus Nullen ausprobieren.
Woher dein Problem nun rührt kann ich dir auch nicht sagen. Du meinst
also das mit der alten Version 2.0 keinerlei Probleme mit deiner HW
entsteht, aber mit der neuen wie oben beschrieben.
Wenn du AVRootloader.asm in AVRStudio kompilierst dann gibts keine
Fehler oder Warnungen ?
Ausgewählte BootSign stimt mir der im ASM überein ?
Gruß Hagen
PS: ich sleber habe nun schon mit ATMega162 und ATiny461 alle Optionen
getestet, Laptop-RS232 mit 1-Wire, geht wunderbar.
Hagen du bist der Beste !!
Sobald ich in der AppCmd ein /00 einsetze geht es !!!
Und zwar beide Funktionen !!!
Und wenn du nicht weißt woran das liegt, dann weiß ich das schon lange
nicht !
Ist mir persönlich aber egal, ich kann mit der Lösung leben !!
Vielen Dank !!!
Gruß Stefan
PS: Wenn du mir jetzt noch die Implementation der 3 neuen Funktionen für
die Test-Dll zukommen lassen könntest, wäre das Spitze !! :-)
>PS: Wenn du mir jetzt noch die Implementation der 3 neuen Funktionen für>die Test-Dll zukommen lassen könntest, wäre das Spitze !! :-)
Ist doch im letzten ZIP drinnen ? oder was meinst du ?
Gruß Hagen
> Ist doch im letzten ZIP drinnen ? oder was meinst du ?
Sorry ! Hab mich vielleicht falsch ausgedrückt ! Meinte den Aufruf der
Funktionen in der Test-Unit !
Also sowas in der Richtung:
1
function TForm1.GetACYFileName: WideString;
2
begin
3
Result := ExtractFilePath(ParamStr(0)) + 'test.acy';
4
end;
Ich will die Functionen ja auch gerne in mein eigenes programm
übernehmen !
>Das Problem mit dem FTDI scheint ein Timing Problem zu sein.>>Hast du mal mehre Nullen zusätzlich getestet ?
Ja hab ich ! Bis zu 12x /00 hintereinander ! Macht aber keinen
Unterschied ! 1x /00 reicht aus ! Ist schon komisch, oder ?!?
Gruß Stefan
eigentlich nicht ;)
Wenn der Bootloader sich schon in seiner FSM befindet so benötigt er
exakt 0x00,0x00,0x00,0x00 um quasi einen Restart von sich selber zu
machen um erneut in die Baudraten Detektion zu springen. Gleich nach
diesen Nullen muß also 0x0D folgen, an Hand dessen die Baudrate
Detektion die Baudrate ermittelt.
Wenn aber die FSM schon aktiv ist und hat schon 1 Kommando Byte
verarbeitet dann reichen die 4 Null-Bytes nicht aus um ein gültiges
Restart Kommando zu dekodieren. Der Bootloader antwortet mit ERRORCRC
oder ERRORCOMMAND, hauptsache er macht nicht irgendwas unanständiges
(eben der Grund warum alle Kommandos separat mit CRC abgesichert sind).
Am besten ist es 7-8 solcher Nullen zu senden, und das ist in meiner
inoffiziellen Version auch schon gefixt.
Der Bootloader war bei dir aber schon in seiner FSM, weil du entweder
nach dem vorherigen Test den AVR nicht reset hast oder das
"RunApplication" Kommando der PC-Software nicht ordentlich ausgeführt
wurde. Es kann durchaus sein das der FTDI Treiber/FTDI selber sofort
alle Daten im Buffer löscht wenn die PC-Software nach dem Senden dieses
Kommandos sofort die VCom schließt. Ich rufe zwar FlushFileBuffers auf,
aber solche Probleme habe ich schon bei einigen Treibern gesehen.
Also wenn du mal testest dann prüfe auch mal ob deine Anwendung nach
einem Disconnect der PC-Software auch automatisch gestartet wird.
Die Aufrufe der neuen Methoden in IApplication sind trivial. Habe nur
wenig Zeit das Beispiel zu korregieren (weswegen es in den letzen ZIPs
auch nicht mehr drinnen ist). Beim nächsten offiziellen Update packe
ichs mit bei.
Gruß Hagen
Hallo.
ich habe das jetzt auch mal bei mir getestet.
Aber ich bekomme leider keine Verbindung zum AVR.
Folgende Einstellungen habe ich in der asm gemacht:
1
.include "m644def.inc"
2
3
#message "compile for" __PART_NAME__
4
5
.ifndef PageSize
6
.error "Device don't support Bootloader !"
7
.else
8
9
10
.equ UseWDR = 1 ; set to 0/1 to de/activate WatchDog Support
11
.equ UseAutobaud = 1 ; set to 0/1 to de/activate Baudrate Detection
12
.equ UseVerify = 0 ; set to 0/1 to de/activate Verify FLASH Command, FLASH write/erase includes implicit verify, can be deactivated
13
.equ UseE2Write = 0 ; set to 0/1 to de/activate EEPROM Write Command
14
.equ UseE2Read = 0 ; set to 0/1 to de/activate EEPROM Read Command
15
.equ UseSRAM = 0 ; set to 0/1 to de/activate SRAM Commands
16
.equ UseCrypt = 0 ; set to 0/1 to de/activate cryptography
17
.equ UseCryptFLASH = 0 ; set to 0/1 to de/activate only use of cryptography for writing to FLASH
18
.equ UseCryptE2 = 0 ; set to 0/1 to de/activate only use of cryptography for writing to EEPROM
19
.equ UseVersioning = 0 ; set to 0/1 to de/activate Versioning for Application Software
20
.equ UartInvert = 0 ; set to 1 to invert UART levels, for RS232 drivers such as MAX232
21
22
23
.equ RX_PORT = PORTD ; Receive Port and Pin
24
.equ RX = PD0
25
.equ TX_PORT = PORTD ; Transmit Port and Pin
26
.equ TX = PD1
27
28
.set XTAL = 16000000 ; only important for BootDelay if Autobaud is used
29
.set BootDelay = XTAL/4 ; 250ms
30
.set BootBaudrate = 115200 ; only used if no Baudrate Detection activated, XTAL is important
31
.set BootVersion = 3 ; Version 3, must be not changed
32
.set BootCodeSize = 406 ; compile and set to value in [.cseg] Used, compile again
Fuses gesetzt auf:
BOOTSZ: Boot Flash size = 1024 words Boot address =$7C00
SUT_CKSEL: Ext. Crystal Osc. 8.0 - Mhz Start-up time: 16k CK+65ms
Quarz: 16Mhz.
Als Port ist bei mir Com10 und Baud habe ich mal auf 2400 gestellt.
Habe habe ich falsch gemacht ?
Danke, Markus
Hallo.
Hab den Fehler gefunden.
.equ UartInvert = 0 muss 1 sein.
Ich nutzte den FTDI 232RL.
Jetzt geht es wunderbar und schön schnell.
Danke für dieses gute Programm.
lg, markus
@Markus:
> BOOTSZ: Boot Flash size = 1024 words Boot address =$7C00> .set BootCodeSize = 406
Die BootCodeSize hast du nach der 1. Kompilation aus AVRStudio so
aktualisert ?
Wenn ja dann benötigt dein Bootloader 1024 Word = 2048 Bytes an FLASH.
Real verbraucht der Bootloader davon aber nur 406 Bytes. Somit stehen
1642 Bytes an FLASH ungenutzt zur Verfügung.
Ich empfehle dir also diesen verschwendeten Platz mit dem Bootloader in
anderer Konfiguration auszunutzen, setze
.equ UseWDR = 1
.equ UseAutobaud = 1
.equ UseVerify = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseSRAM = 0
.equ UseCrypt = 1
.equ UseCryptFLASH = 1
.equ UseCryptE2 = 1
.equ UseVersioning = 1
.equ UartInvert = 1
UseCryptFLASH/UseCryptE2 kannst du auch auf 0 setzen wenn du möchtest
das man den AVR mit oder ohne Verschlüsselung benutzen kann.
Wenn dann würde ich aber nur UseCryptE2=0 setzen, man kann also mit oder
ohne Verschlüsselung den EEPROM schreiben. Bei UsCryptFLASH=1 kann der
FLASH nur mit Verschlüsselung geschrieben werden. Das erhöht die
Sicherheit enorm. Besonders eben auch die Datenintegrität und ihre
Überprüfung wird mit der Verschlüsselung weitaus besser sein, da diese
quasi eine 64Bit secure Prüfsumme benutzt, neben der 16Bit CRC die
sowieso immer über die Daten berechnet wird.
Erzeuge vor der Kompilation mit der PC-Software ein neues Passwort mit
der PC-Software -> Button "Make Password".
Setze BootSign: auf einen längeren Wert, zb. BOOTLOADER, um die
Wahrscheinlichkeit einer Fehlanmeldung stark zu reduzieren.
Setze in BootMsg: einen für dich aussagekräftigen Titel/Copyright.
Selbst wenn du alle diese Features aktivierst wirst du maximal 950 Bytes
von den 2048 zur Verfügung stehenden Bytes des FLASHs verbrauchen.
Dh. der Bootloader ist für die großen ATMegas so klein das er mehrmals
in die minimale FLASH Size für eine Bootpage reinpasst.
Du könntest noch eine 1Kb Lookup Tabelle für deine Anwendung in diesem
FLASH unterbringen.
Gruß Hagen
> Am besten ist es 7-8 solcher Nullen zu senden, und das ist in meiner> inoffiziellen Version auch schon gefixt.
Also dazu kann ich nur sagen, das der Connect jetzt mit jeder Version
funktioniert ! sobald ich in AppCMD 1x /00 setze !!
> Der Bootloader war bei dir aber schon in seiner FSM, weil du entweder> nach dem vorherigen Test den AVR nicht reset hast oder das> "RunApplication" Kommando der PC-Software nicht ordentlich ausgeführt> wurde. Es kann durchaus sein das der FTDI Treiber/FTDI selber sofort> alle Daten im Buffer löscht wenn die PC-Software nach dem Senden dieses> Kommandos sofort die VCom schließt. Ich rufe zwar FlushFileBuffers auf,> aber solche Probleme habe ich schon bei einigen Treibern gesehen.
Bei der Theorie muß ich dich leider enttäuschen ! Hab die letzten Tests
sowohl mit FTDI als auch mit Max232 getestet, bei beiden das exakt
gleiche verhalten !!
> Also wenn du mal testest dann prüfe auch mal ob deine Anwendung nach> einem Disconnect der PC-Software auch automatisch gestartet wird.
Das funktioniert einwandfrei !
> Die Aufrufe der neuen Methoden in IApplication sind trivial.
Für dich vielleicht ! :-)
> Habe nur wenig Zeit das Beispiel zu korregieren (weswegen es in den> letzen ZIPs> auch nicht mehr drinnen ist). Beim nächsten offiziellen Update packe> ichs mit bei.
Kein Problem ! Muß meine App. halt noch nen bißchen warten ! Ich werds
überleben !
Gruß Stefan
@Stefan:
>Bei der Theorie muß ich dich leider enttäuschen ! Hab die letzten Tests>sowohl mit FTDI als auch mit Max232 getestet, bei beiden das exakt>gleiche verhalten !!
Was benutzt du als BootSign: ?
Bzw. poste mal alles was in der ASM nach BootInfo: steht und die Section
[BootSign] aus der INI Datei.
Gruß Hagen
Das Einzige was mir auffällt ist die Baudrate von 256000. Takt im AVR
sollte mindestens 7.68MHz sein ist dann aber schon Fehleranfällig bei
der Baudratedetektion. Hast du mal mit geringerer Baudrate probiert ?
>Hast du mal mit geringerer Baudrate probiert ?
Ja klar ! 256000 war nur mal zum Testen ob es damit auch geht !:-)
Aber durch die BaudRate-Detection sollte es ja eigentlich auch egal sein
was da drin steht !?
>Aber durch die BaudRate-Detection sollte es ja eigentlich auch egal sein>was da drin steht !?
Jain ;) ganz egal ist es nicht, bei der Rechnung XTAL / Baudrate - 29
darf kein Wert kleiner 1 rauskommen. Aber selbst wenn 1 rauskäme so wäre
das schon sehr kritisch (Abtasttheorem).
Dh. je geringer die Taktfrequenz des AVRs und je
ungenauer/kurzzeit-instabiler desto geringer sollte die Baudrate
eingestellt werden.
Je geringer der Wert bei XTAL/Baudrate-29 ist desto exakter sollte die
Taktfrequenz durch die Baudrate teilbar sein, also ohne Rest.
Je geringer aber die Baudrate ist desto längere Timeouts muß die
PC-Software benutzen. Je größer diese Timeouts sind desto langammer ist
der Verbindungsaufbau. Die Wahrscheinlichkeit für ein ungünstiges
Connect-Timing steigt.
Gruß Hagen
OK ! Neue Erkenntnisse !
Feste BaudRate-BootSign(10Zeichen)-AppCmd(leer):
Connect funktioniert ! Aber nur das letzte Zeichen vom BootSign wird
angezeigt !
BaudRate-Detection-BootSign(10Zeichen)-AppCmd(leer):
Connect funktioniert ! Aber es wird abwechselnd das komplette BootSign
oder das letzte Zeichen ausgegeben !!!
Gruß Stefan
Und gleich noch was merkwürdiges hinterher !
Mit deiner Debug-AVRootloader Datei kommen abwechselnd das komplette
BootSign oder die letzten 2 Zeichen !!!
Mit deiner AVRootloader 3.1(bzw. 3.0 mit neuestem update) Datei kommen
abwechselnd das komplette BootSign oder das letzte Zeichen !!!
Übrigens sowohl mit FTDI als auch Max232 !
Gruß Stefan
> Mit deiner Debug-AVRootloader Datei kommen abwechselnd das komplette> BootSign oder die letzten 2 Zeichen !!!>> Mit deiner AVRootloader 3.1(bzw. 3.0 mit neuestem update) Datei kommen> abwechselnd das komplette BootSign oder das letzte Zeichen !!!
Sorry, da war ich ein bißchen voreilig !!
Hatte bei der AVRootloader 3.1 noch ein /00 im AppCMD stehen, dadurch
fehlte hier ein Zeichen !!
Also die beiden Versionen reagieren identisch !!
Gruß Stefan
Wo wird was angezeigt ? Beim Wert "Ident:" oder "Received:" ?
Beim Ident muß immer stehen:
AppCmd + $00 $00 $00 $00 $0D + BootSign
Bei Received darf niemals das BootSign drinnen stehen. Wenn das der Fall
sein sollte dann empfängt die PC-Software teilweise Daten die sie selber
abgesendet hat, und das darf überhaupt nicht sein, egal ob 1-Wire oder
nicht.
Lade dir mal aus dem WEB bei sysinternals.com den PortMon und sniff mal
real alles das mit was über die COM geht.
Deine Angaben sind teilweise sehr verwirrend für mich, kosten mir Zeit
und bringen im Endeffekt nichts. Es wäre auch gut wenn du bei solchen
Sachen die Ausgabe im Protkollfenster mit postest, dann kann ich mir
wesentlich besser ein Bild machen.
Gruß Hagen
> Wo wird was angezeigt ? Beim Wert "Ident:" oder "Received:" ?
Steht bei recived ! eine Kennzeichnung Ident hab ich noch nirgens
gesehen !!
> Beim Ident muß immer stehen:> AppCmd + $00 $00 $00 $00 $0D + BootSign
So eine meldung hab ich noch nie gesehen !
> Bei Received darf niemals das BootSign drinnen stehen. Wenn das der Fall> sein sollte dann empfängt die PC-Software teilweise Daten die sie selber> abgesendet hat, und das darf überhaupt nicht sein, egal ob 1-Wire oder> nicht.
Dann hab ich wohl nen riesen Problem !! Weil genau da steht das nämlich
drin.
29.01.09-18:22:25-812 > Device disconnected
29.01.09-18:22:26-640 > Connecting on port COM1...
29.01.09-18:22:26-703 > Switch to 2-Wire mode
29.01.09-18:22:26-765 > received:
$48,$61,$6C,$6C,$6F,$21,$21,$21,$21,$61,$61,$00,$93,$07,$03,$10,$FF,$FF,
$FF,$FF,$39
29.01.09-18:22:26-765 > Device connected
> Lade dir mal aus dem WEB bei sysinternals.com den PortMon und sniff mal> real alles das mit was über die COM geht.
Werd ich gleich mal versuchen !
> Deine Angaben sind teilweise sehr verwirrend für mich, kosten mir Zeit> und bringen im Endeffekt nichts. Es wäre auch gut wenn du bei solchen> Sachen die Ausgabe im Protkollfenster mit postest, dann kann ich mir> wesentlich besser ein Bild machen.
OK ! Ich gelobe Besserung ! Will es dir ja nicht noch schwerer machen
als du es mit mir eh schon hast ! :-)
Danke
Stefan
Hab mal 2 Scans mit Portmon gemacht.
Test2: AppCmd(leer)-> Connect
Test3: AppCmd(AppCMD)-> kein Connect
Sag mal, arbeiter der AVRootloader eigentlich mit einem WDR wenn er
keinen Connect bekommt, oder versucht er es immer weiter ?
Gruß Stefan
$48,$61,$6C,$6C,$6F,$21,$21,$21,$21,$61,$61,$00,
$93,$07,$03,$10,
$FF,$FF,$FF,$FF,
$39
$48,$61,$6C,$6C,$6F,$21,$21,$21,$21,$61,$61,$00, -> in ASCII
"Hallo!!!!aa" ist deine BootMsg:
Danach kommen 4 Bytes BootInfo: wobei $93,$07 -> ATmega8, $03 =
BootVersion 3 und $10 = Anzahl der FLASH Pages die der Bootlaoder
benötigt $10 * 64 = 1024 Bytes.
Nun kommen 4 Bytes Versionsnummer, $FFFFFFFF heist noch keine Anwendung
drinen.
Als letztes Byte $39 = SUCCESSCODE, du hast UseVersiong=1 und UseCrypt=1
aber UseCryptFLASH = 0 und UseCryptE2 = 0. Somit kannst du
unverschlüsselt wie auch verschlüsselt mit dem Bootloader kommunizieren.
Allerdings benuzt die PC-Software in diesem Fall immer keine
Verschlüsselung.
Sooo, mal abgesehen das du das Zeichen ! zu lieben scheinst, ich sehe in
diesen Daten nichts vom BootSign: Das BootSign: steht per Standard auf
"BOOT".
Zitat:
>> Bei Received darf niemals das BootSign drinnen stehen. Wenn das der Fall>> sein sollte dann empfängt die PC-Software teilweise Daten die sie selber>> abgesendet hat, und das darf überhaupt nicht sein, egal ob 1-Wire oder>> nicht.>Dann hab ich wohl nen riesen Problem !! Weil genau da steht das nämlich>drin.
Das was ich sehe ist eine perfekte Antwort des Bootloaders im AVR.
>Sag mal, arbeiter der AVRootloader eigentlich mit einem WDR wenn er>keinen Connect bekommt, oder versucht er es immer weiter ?
Nein nicht mit dem WDT. Ein WDR würde ja bedeuten das er sich immer
wieder
selber aufruft.
Solange der Bootloader in der Wartephase auf einen Connect ist und er am
RX Pin irgendwas empfängt (toggelt) wartet er solange bis er ein
gültiges Connect empfangen hat. Dh. er versucht die Baudrate zu
berechnen und wartet auf den Wert in BootSign. Sobald sich am RX Pin
nichts mehr tut wird nach einem Timeout die Anwendung gestartet. Deshalb
ist das #define XTAL und BootDelay wichtig.
Wenn also im Normalfalle der Bootloader per RESET/Poweron angesprungen
wurde und sich in BootDelay Millisekunden nichts am RX Pin getan hat
dann wird die Anwendung gestartet.
Wenn sich aber in dieser Zeitspanne was am RX Pin tut so wird quasi
diese Zeitspanne erneut gewartet, eben ein Timeout. Solange also irgend
eine PC-Software was in dieser Phase was sendet gibt es nur zwei
Möglichkeiten aus dieser Schleife rauszukommen: a) für BootDelay
Millisekunden hört die Software auf was zu senden oder b) sie sendet den
korrekte BootSign Sequenz und der Bootloader antwortet zB. mit den Daten
wie du sie oben gepostet hast.
Der Watchdog wird mit UseWDT unterstützt. Aber auch nur um die WDT
Zeiten zu verlängern damit der Bootloader nicht durch den WDT gestört
wird. Man kann ja den WDT per WDTON Fuse permanent aktivieren und würde
der Bootoader nicht das berücksichtigen so stört der WDT den Bootloader.
Finally: ich sehe in deinen geposteten Daten keinerlei Fehler.
Die Daten in den .LOG Files vom PortMon mal bitte auf HEX stellen, bei
Sonderzeichen macht PortMon ein '.' und somit wie0 man nicht was das
bedeutet. -> Menu -> Options -> Show HEX.
Gruß Hagen
Hallo Hagen !
OK, das mit dem BootSign hab ich wohl gründlich falsch verstanden
gehabt, Sorry !
Inwieweit beeinflußt eigentlich die Einstellung der Baudrate im Program
den Verbindungsaufbau ?
Hab nämlich festgestellt das bei AppCmd(leer) der Verbindungsaufbau mit
115200 Baud tadellos funktioniert, aber bei zunemender Zeichenanzahl in
der AppCmd ich mit der Baudrate runtermuß um sporadisch noch einen
Connect zu bekommen. Sprich Connect funktioniert dann nur noch zu 30-40%
!
Hab im Anhang nochmal 2 Test, diesmal mit Hex !
Gruß Stefan
In Test4_PortMon.LOG hast du zweimal einen Connect aufgezeichnet. Der 1.
davon hat super funktioniert, ab Zeile 22.
Beim 2. Connect, ab Zeile 76 reagiert der AVR erst auf den zweiten
Connect versuch. Er ist beim ersten noch in er FSM und antwortet deshalb
mit C2 C2 -> ErrorCRC. Ein Command kann minimal 4 Bytes lang sein, bei
2x Fehler C2 (ERRORCRC) hat er also 8 Bytes empfangen. Das stimmt
insoweit mit der Anzahl der voeher gesendeten Bytes über ein, sind 9
Bytes im Connect String.
Danach, beim zweiten Senden des Connect Strings, verbindet er sauber.
Das heist der AVR ist schon in der Command-FSM, denn das ist er einzige
Punkt an dem ein ERRORCRC gesendet wird.
Test5_PortMon.log ist da schon erheblich interessanter.
Nach senden des Connect Strings, Zeile 22 zb., wird vom AVR die Bytes 80
00 empfangen. Nur woher kommen die ? Vom AVR garantiert nicht. Es
scheint so auszusehen das irgendwas auf deinem Board nicht stimmig ist.
Es gibt kein Kommando das mit den gesendeten Bytes für "AppCmd"
übereinstimmen würde und der AVR würde mit C2 oder C3 darauf reagieren
müssen, wenn er in seiner FSM wäre. Einzige Erklärung die ich noch habe,
wenn es tatsächlich am Bootloader läge, ist das irgendeines der Bytes,
bzw. sogar mehrere, innerhalb der Baudrate Detektion, als 0D Sequenz
erkannt wird. Er arbeitet dann mit falscher Baudrate und sendet wiederum
ein C2, aber wir sehen es als 80 00 mit anderer Baudrate.
Wenn man den AVRootloader.ASM nun mit fester Baudrate programmieren
würde, zb. 112500, dann müsste beim gleichen Test wie in
Test5_PortMon.log was anderes rauskommen.
Die Gefahr das die Baudrate Detektion andere Bytessequenzen
fälschlicherweise als 0D Sequenz interpretiert ist gegeben und führt
zwangsläufig dazu das der AVR eine andere Baudrate detektiert.
Ich weiß es nicht warum es bei dir nicht sauber funktioniert. Es ist ja
nun nicht so das es mit dem FTDI nicht funktionieren würde, das
bestetigten ja die positiven Rückmeldungen hier im Forum.
Gruß Hagen
Sag mal, wenn du AVRootloader.ASM kompiliert hast, dann hast du doch aus
dem Message Window vom AVRStudio den Wert aus CSeg Used in das ASM bei
BootCodeSize eingetragen und mit AVRStudio erneut kompiliert. Dann hast
du dir den Output im Message Window nochmal genauer angeschaut und dort
den Hinweis gesehen auf welche Bootfuses du den AVR setzen solltest.
Nach dem Flashen des HEX über ISP hast du auch die Boot Fuses
entsprechend eingestellt, richtig.
Denn ich denke auch da könntest du einen Fehler gemacht haben. Dieser
Fehler könnte sein das der Bootloaderr Code im FLASH an einer falschen
Addresse gespeichert wurde im Vergleich zu den eingestellten Bootfuses.
Das würde dann nämlich bedeuten das nach einem RESET der AVR mitten in
den Bootloader springen könnte und es so zu erklären ist warum der AVR
ständig in der Command FSM drinnen ist statt in der Baudrate Detektion +
BootSign Überprüfung zu warten.
Gruß Hagen
Hagen Re wrote:
> Sag mal, wenn du AVRootloader.ASM kompiliert hast, dann hast du doch aus> dem Message Window vom AVRStudio den Wert aus CSeg Used in das ASM bei> BootCodeSize eingetragen und mit AVRStudio erneut kompiliert. Dann hast> du dir den Output im Message Window nochmal genauer angeschaut und dort> den Hinweis gesehen auf welche Bootfuses du den AVR setzen solltest.> Nach dem Flashen des HEX über ISP hast du auch die Boot Fuses> entsprechend eingestellt, richtig.
AVRASM: AVR macro assembler 2.1.30 (build 592 Nov 7 2008 12:38:17)
Copyright (C) 1995-2008 ATMEL Corporation
C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.asm(68): Including file 'C:\Programme\Atmel\AVR
Tools\AvrAssembler2\Appnotes\m8def.inc'
C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.asm(126): compile for ATmega8
C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.asm(164): Including file 'C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.inc'
C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.asm(161): WARNING: actual settings compromise security !
C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.inc(114): Please program Boot Fuse to Third Boot Start !
C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.asm(955): No EEPROM data, deleting C:\Dokumente und
Einstellungen\Stefan\Desktop\AVRootloader_3_0\AVRootloader\AVR\AVRootloa
der.eep
ATmega8 memory use summary [bytes]:
Segment Begin End Code Data Used Size Use%
---------------------------------------------------------------
[.cseg] 0x001c00 0x001f3a 792 34 826 8192 10.1%
[.dseg] 0x000060 0x000060 0 0 0 1024 0.0%
[.eseg] 0x000000 0x000000 0 0 0 512 0.0%
Assembly complete, 0 errors. 0 warnings
->
BootSZ1 = 0 BooTSZ0 = 1 BootRST = 0
Hab mal die Baudrate-Detection raus genommen und mit 115200 und 19200
getestet! gleiches Ergebnis ! sobald was in der AppCmd drin steht kein
Connect ! Aber ... mache ich zwischen den Connect-Versuchen einen Reset,
dann bekommt er beim nächsten versuch 1x einen Connect !
Es sieht also so aus als ob ich irgendein problem mit dem 'Internen
Reset' bzw. des Ablaufs der ConnectRoutine im AVR habe. Und was mich
wirklich irritiert ist halt die Tatsache das es ohne AppCmd funktioniert
und mit eben nicht ! Bzw. wenn er connectet dann mal mit vollem BootSign
oder nur mit dem letztn Buchstaben. Siehe Test4 ab Zeile 23 und ab Zeile
81 ! So geht das dann immer im Wechsel !
Gruß Stefan
Hallo Hagen !
kannst du dir mal die angehängte LogDatei anschauen.
Beim ersten Connectversuch war AppCMD leer. Beim zweiten Versuch ab
Zeile 123 war AppCMD = /00 ! Die empfangenen Zeichen sind in beiden
Fällen identisch außer das Sie im ersten Fall hintereinander stehen und
im zweiten Fall untereinander. Kannst du mir sagen woran das liegen
könnte ? bzw. kann ich diese /00 nicht einfach auf AVR-Seite Hardcoden
??
GRuß Stefan
Hi Stefan,
probiere mal die neuste Version im Attachment aus. Ich habe den
Verbindungsaufbau verändert.
Bisher würde bei einem Connect Versuch erstmal auf 1-Wire eingestellt.
Dann wurde der Connect-String gesendet und versucht exakt diesen Wert
sofort wieder vom COM Port zu lesen. Schlug dies fehl so wurde auf
2-Wire Mode umgeschaltet. DIese Vorgehensweise birgt aber ein Problem.
Wenn nämlich der AVR den 2-Wire Modus benutzt so empfängt der PC ja
sofort den Signature-String des AVRs statt dem soeben gesendeten
Connect-String. Der AVR ist also schon in seiner FSM drinnen, aber die
PC-Software schaltet erst jetzt in den 2-Wire Modus. Darauf hin versucht
sie erneut einen Connect im 2-Wire Modus und sendet erneut den
Connect-String. Das ist der Grund warum bei dir diese Probleme
auftraten.
Nun ist das geändert. Die PC-Software geht erstmal von 2-Wire Modus aus.
Sendet den Connect-String und empfängt die komplette Antwort. Dieser
String kann nun am Anfang den Connect-String selber enthalten, ergo
1-Wire Modus muß benutzt werden. Aus den empfangen Daten wird der vorher
gesendete Connect-String entfernt und der Rest dieser Daten ist die
Signature des AVRs die er gesendet hat.
Der Verbindngsaufbau und die Unterscheidung zwischen 1/2-Wire ist nun
wesentlich stabiler und schneller.
Gruß Hagen
Hier die neuste Version 4
Neuerungen:
- RS485/Profibus Unterstützung, dh. im Halbduplex Verfahren kann man
RS485 Treiber benutzen die einen Data Enable (DE) Eingang besitzen. Im
AVRootloader.asm einfach UseRS485=1, DE_PORT und DE setzen. Möchte man
invertierte Pegel nutzen dann noch UseRS485invert=1 setzen. Diese
Funktionalität konnte ich aber leider noch nicht testen ;(
- verändertes Verhalten des Watchdog Timers. Wird UseWDT=1 gesetzt so
wird der WDT im Bootloader explizit aktiviert und auf 2 Sekunden Timeout
gesetzt. Tritt nach 2 Sekunden ein WDT auf so wird ein RESET
durchgeführt. Somit ist die Stabilität des Bootloaders verbessert worden
wenn zb. ein ungeplanter Verbindungsabbruch auftreten sollte. Bitte
beachten das in der eigenen Anwendung auf den WDT reagiert werden muß,
oder er deaktiviert wird. Wie das geht zeigt das Testprojekt im Ordner
\test\.
- Mit UseSaveMCUCSR=1 wird der Wert aus dem Reset-Register MCUCSR in den
Stack gespeichert (RAMEND) bevor er in den WDT Routinen gelöscht wird.
Somit stehen diese Informationen für die Anwendung zur Verfügung. Wie
man das zb. in WinAVR GCC benutzen kann sieht man im Beispiel Projekt im
Ordner \test\
- Mit UseBootMode=0/1/2/3/4 kann man das Startverhalten des Bootloaders
beeinflussen. Über diese Konfiguration wird eingestellt das der
Bootloader zb. nur bei einem Power Up, externen Reset, Watchdog Reset
oder per Jump aus der Anwendung gestartet wird. Mit diesen Bootmodis
kann man die Startup Zeit der Anwendung beeinflussen. eg. verkürzen und
nur auf ausgewählte Ereignisse fixieren.
- Mit UseBootVector=1 wird am Ende des FLASHs ein Sprungvektor zum
Einsprungspunkt des Bootloaders erzeugt. Über diesen Vektor kann man aus
der eigenen Anwednung universell für alle AVR Typen die diesen
Bootloader benutzen den Bootloader aufrufen. Man muß also nicht explizit
die Startadresse des Bootloaders mehr berechnen.
- Mit UseSpecialFuncs=1 werden am Ende des Bootloaders verschiedene
zusätzliche Funktionen und eine Sprungtabelle eingebunden. Diese
Spezialfunktionen können aus der eigenen Anwendung heraus aufgerufen
werden. Sie können auch durch eigenen Code/Lookup Tabelle erweitert
werden.
Der normale Anteil an Code des Bootloaders ist so kompakt das er auf
größeren ATMegas mehrmals in die kleinste Bootsektion reinpasst. Man
verschwendet also in diesem Fall ungenutzen FLASH den man nun für diese
Spezialfunktionen aus der Anwendung heraus benutzen kann.
Zur Demonstration wurden die Funktionen zur Abfrage der AppVersion und
BootMsg/BootInfo eingebaut. Wie man diese benutzt kann man im Test
Projekt im Ordner \test\ für WinAVR GCC anschauen und austesten.
- im Ordner \test\ ein Test-Projekt in WinAVR GCC zur Demonstration der
Bootloader Funktionalität. Im Headerfile AVRootloader.h eine universelle
Schnitstelle zum Bootloader.
- durch einige Optimierungen im Code konnte der benötigte FLASH
reduziert werden
- mehr Kommentierungen
Bugfixes/Veränderungen:
- die AVR Typen ATMega161/ATMega163/ATMega323 benötigen bei der
Ausführung des SPM Befehles ein spezielles programmtechnisches Vorgehen.
Diese wurde gefixt und eingebaut.
- der Connect Prozess wurde verändert. Die Abfrage/das Warten auf das
BootSign von der PC-Software benutzt nun einen Timeout innerhalb
BootDelays. Bei der alten Version mit UseAutobaud=1 konnte es an dieser
Stelle zu einer Endlosschleife kommen, der Bootloader verblieb also bei
einem Kommunikationsabbruch endlos in dieser Schleife.
- im neuen Connect Prozess erwartet der Bootloader nach dem Empfang des
BootSign eine 16 CRC über diese BootSign. Dies inkrementiert die
Stabilität des Connect Prozess und beseitigt gleichzeitig ein Problem
beim Connect. Bei der alten Version konnte man beim BootSign "BOOT" zb.
auch mit einem Wert wie "BOOT1234" einen Connect bekommen. Die
zusätzlichen Zeichen "1234" störten die Command-FSM des Bootloaders und
es stellt auch ein Sicherheitsrisiko dar wenn man das BootSign als
Passwort betrachtet.
- wenn UseVersioning=1, UseCrypt=1 und UseCryptFLASH=1 war so wird ja
die AppVersion Nummer auf cryptographisch sichere Weise bei einem Update
per ACY Datei überprüft. Diese Überprüfung war nicht ganz korrekt. Ist
gefixt.
PC-Software:
- die Kommunikationsgeschwindigkeit wurde durch Optimierungen
beschleunigt.
- einige Fehler in der Bedienung etc.pp. beseitigt
- neue Einstellungen in der AVRootloader.ini
* [System]-AppCmd, [System]-AppCmdResponse, [Timeouts]-AppCmd.
über diese Einstellung kann man der Software mitteilen das sie bei einem
Connect erstmal das AppCmd an die eigene Anwednung zu senden hat. Wenn
nun in AppCmdResponse ein Wert steht so wartet die Software auf den
Empfang dieses Wertes. Eure Anwendung muß also dann dieses Response
senden und startet dann den Bootloader per Watchdog oder direktem
Sprung.
Nach Empfang des Response wartet die Software [Timeuts]-AppCmd
Millisekunden bevor sie mit dem Connect weiter macht. Startet man den
Bootloader in der eigenen Anwendung zb. per Watchdog und Endlosschleife
dann entsteht ein minimaler Timout von 17ms. Damit die PC-Software
ebenfalls diese Zeitspanne wartet kann man zB. Timeouts.AppCmd=20
setzen.
* [Timeouts]-KeepAlive ist ein Interval in Millisekunden in dem die
PC-Software beim Bootloader nachfragt ob er noch aktiv ist. Hat man mit
UseWDT=1 den Watchdog aktiviert so muß dieser spätestens nach 2 Sekunden
periodisch zurückgesetzt werden. Exakt das macht die PC-Software im
Interval von KeepAlive. Das hat mehrere Vorteile. Die PC-Software
bekommt mit wenn eine Verbindung zum Bootloader unterbrochen wurde und
trennt die Verbindung automatisch. Der Bootloader seinerseits erkennt
das die Verbindung zur PC-Software getrennt wurde und wird spätestens
nach 2 Sekunden durch einen Watchdog Timeout terminiert. Zudem
inkementiert es auch die Stabilität des Bootloaders auf unvorhergesehene
Ereignisse. Ich empfehle also mit UseWDT=1 zu arbeiten.
* [Timeouts].Options. Dies ist ein Bitkodierter Wert. Bit 0 = 1 ist der
Debugmode der PC-Software. Bit 1=2 bestimmt das Verhalten im Connect
Prozess beim Senden der BootSign. Ist dieses Bit gesetzt so benutzt die
Software die alte Methode beim Senden des BootSign, also ohne CRC
Prüfsumme. Damit wird die Kompatibilität zum alten AVRootloader.asm
gewährleistet. Für die neuste Version darf dieses Bit nicht gesetzt
sein.
- der neue Connect Prozess geht von einer 2-Wire Verbindung aus und
schaltet erst während des Connects dynamsich auf 1-Wire um wenn dieser
benutzt wird. In der alten Version war es umgekehrt. Diese Veränderung
verbessert die Connect Performance und Stabilität.
- XPORT (TCP/IP zu RS232-Wandler) wird sauber unterstützt. Der Grund
einiger Änderungen in der Kommunikation. Bei Interesse gibt noch Tipps
wie man den XPORT ordentlich konfiguriert von mir.
Tipps:
Wird so wie im Testprojekt im Ordner \test\ der PinChange am RX Pin
benutzt um 1.) aus dem Power Down Sleep Mode aufzuwachen und 2.) den
Bootloader zu starten dann sollte man in AVRootloader.ini folgende
Einstellungen treffen
[system]
AppCmd=/AA
AppCmdResponse=
[timeouts]
AppCmd=20
Somit sendet die PC-Software erstmal das Zeichen 0xAA um den PinChange
in der ISR zu bedienen. Innerhalb dieser ISR wird der Bootlaoder per
Watchdog Reset gestartet mit minimalem Timeout von 17ms. Die PC-Software
wartet nun ihrerseits 20 ms und somit wird der gesammte Connect Prozess
verbessert da das Timing ideal aufeinander abgestimmt ist.
Lese Readme.txt im Ordner \test\ ;)
Wenn ich die Spezialfunktionen in Special.inc erweitert vergesst nicht
am Ende des Sources euren Sprungvektor einzubauen. Desweiteren muß die
.org Direktive aktualisiert werden. In AVRootloader.h könnt ihr sehen
wir ihr dann eure Funktionen aufrufen könnt.
Mit der Spezialfunktion "GetBootMsg" kann man nicht nur die BootMsg aus
dem FLASH auslesen sondern auch alles was danach kommt. Also auch
BootKey: das Passwort der Verschlüsselung. Das ist kein
Sicherheitsrisiko wenn ihr alle korrekt konfiguriert habt. Also
UseSRAM=0, UseCryptFFLASH=1, UseCrypt=1. Desweiteren liefert nur ihr
vorkompilierte ACY Dateien an eure Kunden aus. Somit ist jeder
Anwendungscode der programmiert wird durch euch authorisiert.
Gruß Hagen
@Hagen:
Ein fettes Dankeschön für den riesigen Ehrgeiz, den du hier in das
Projekt investierst! Absolut fettes Tool!
Vielleicht kann ich die Tage ja einige Funktionen testen.
Eine Sache ist mir noch aufgefallen. Ich benutze ja den 1-Wire Betrieb
auf einem ATtiny45 mit einem FTDI. Wenn ich in meiner Software den
1-Wire Pin als Ausgang nutze, dann erkennt die PC-Flash-Software in
einem Großteil der Fälle immer den 2-Wire Betrieb. In den Bootloader
komme ich durch das Trennen der Betriebsspannung. Den Resetpin benutze
ich als 1-Wire-Pin. Die Verbindung kommt zu Stande aber eben im 2-Wire
Betrieb, wodurch dann das Flashen fehlschlägt. Vielleicht hast du ja
eine Idee, woran es liegen könnte.
Grüße
Hm, der Reset Pin hat der einen internen Pullup ?
Der FTDI ist ein Pegelwandler und ich habe mit Use1Wire und
UseUartInvert=1 einige Probleme hardwaretechnischer Art gehabt. Zu
Testzwecken benutzte ich den Spare-RS232 vom STK500. Wenn man den RX-TX
per Brücke verschaltet dann empfängt die PC-Software korrekterweise das
was sie vorher gesendet hat. Überbrückt man RX-TX aber mit zb. einem 2k7
Widerstand so empfängt die Software nichts mehr. Warum dies so ist weiß
ich bisher auch noch nicht, es sollte ja kein Problem damit geben. Aber
exakt diese Minimalbeschaltung benötigt man wenn man 1-Wire mit
TTL-RS232 benutzen möchte.
Du kannst bei der neuen Version mal in der AVRootloader.INI
[Timeouts]-Options=1 setzen, bzw. auf 3 wenn du mit der alten
AVRootloader.asm testen möchtest (diese empfehle ich dir aber nicht da
gerade im Connect Prozess einige Änderungen erfolgten)
Mit diesen Änderungen siehst du dann im Protocol-Window der PC-Software
was sie sendet und was sie empfängt. Bei 1-Wire müsste bei "received
data:" erstmal das stehen was bei "send ident:" gesendet wurde. Plus am
Ende die Antwort des Bootloaders die mit 0x3? enden muß.
Hast du den 1-Wire in deiner Konfiguration überhaupt schonmal zum laufen
gebracht ?
Du könntest mir per PN, eg. Mail mal den Output des Protocolwindows
mailen. Vieleicht sehe ich ja mehr.
Gruß Hagen
@Hagen
Pullup am Resetpin ist auch drin. Überprüfe es aber morgen nochmal.
Ja die 1-Wire Konfiguration mit dem FTDI habe ich in den Griff bekommen.
Jedoch nur indem ich UseUartInvert=0 gesetzt habe und mit dem
Konfigurationsprogramm (MProg) von FTDI den FT232R so programmiert habe,
dass die RX/TX Leitungen invertiert werden. (Siehe Anlage)
Mit UseUartInvert=1 und 1-Wire tut sich gar nichts. Am Oszi sieht man,
dass der uC kein einziges Bit sendet.
Also die PC Software empfängt immer nur ihr eigenes Signal, wenn der Pin
ein hochohmiger Eingang ist. Ist er ein Ausgang, so liegt das
entsprechende Signal des uC am RX des Pegelwandlers. Der Widerstand ist
ja zwangsläufig nötig, da der TX des Pegelwanlders ja ein Ausgang ist.
Im 1-Wire Betrieb ist der uC Pin ja zumindest zeitweise auch ein Ausgang
und damit es dann keinen Kurzschluss gibt muss der Widerstand her.
Da die Verbindung ja korrekt Aufgebaut wird, nur eben der falsche
Wire-Modus erkannt wird, muss der uC Pin am Anfang nach dem
Wiederanlegen der Spannung ein Ausgang sein. Somit merkt deine Software,
dass die eigenen gesendeten Daten nicht ankommen. Der uC empfängt alles
korrekt und meldet sich dann zurück. Sehr strange. Also wenn man es
einfach mehrmals probiert, dann erkennt er irgendwann mit Glück den
1-Wire und man kann flashen^^
Ich schaue mir mal morgen die Sache mit deinen weiter angeführten Ideen
an
LG Mark
Liegt nicht an dir, es lag am Source. Es tut mir ja immer leid wenn mir
sowas passiert, sieht immer nach Schnellschuß aus, aber irgendwann
einmal muß ich an den Sourcen was kaputt repariert haben.
Im Attachment die gefixte Version. Ich habe sie nun in allen Modis
getestet. 1/2 -Wire, invertiert und nicht invertiert, direkt an RS232,
an USB-RS232 Wandler und am XPORT über TCP/IP.
So langsam überblicke ich die ganzen RS232 Kabel auf meinem Schreibtisch
nicht mehr ;)
Du nimmst einen zb. 2k7 Widerstand und schließt diesen zwischen RX und
TX am FTDI. Am RX Pin den RX des AVRs.
In deinem Falle ist es so das 1-Wire identisch zum zb. Dallas 1-Wire
oder I2C arbeitet. Der AVR zieht den RX/TX Pin aktiv nach Masse als
Ausgang. Ansonsten setzt er den Pin als Eingang. Der 2k7 Widerstand am
TX-FTDI zieht die Leitung auf VCC und ist also sowas ähnliches wie ein
externer Pullup und Stromegrenzung. Bei dieser Verschaltung benötigt man
keine Serienwiderstand falls man zb. mehrere AVRs an einer Leitung legen
möchte. Der AVR kann auch mit geringerer VCC betrieben werden als der
TX-FTDI Ausgang liefert.
Bei 1-Wire an nativer RS232, also ohne Pegelwandler, liegt ebenfalls ein
2k7 Widerstand zwischen RX und TX an der DB9. Auch dieser dient zur
Strombegrenzung und die internen Bodydioden des AVRs begrenzen negative
Spannung gegen Masse. Desweiteren zieht die TX Leitung ebenfalls den
RX-Pin gegen -15V. Der Bootloader benutzt hier Strong/Weak-High-Pegel
statt eben Strong-Low-Pegel wie bei dir. 1-Wire-native-RS232 läuft bei
mir bis auf 1.8 Volt VCC runter.
Gruß Hagen
Hallo Hagen,
mir ist gerade folgendes bei der aktuellen Version aufgefallen:
unter Win98se folgt dem 'Connect' sofort darauf wieder ein 'Disconnect'.
Auch im Debug-Modus ist kein Grund erkennbar.
Ausprobiert auf zwei Win98-PC und drei WinXP-PC mit identischem AVR-Chip
(M168).
Mit den Parametern UseBootMode=0, UseWDR=1 und UseSaveMCUCSR=0 überlebt
das MCUCSR beim M168 ohne besondere Tricks, beim M128 ist es immer
gelöscht (wie beschrieben).
Wäre es nicht einfacher bei UseWDR=1 immer das gerettete MCUCSR zu
restaurieren? - Dann könnte die Applikation immer gleich sein,
unabhängig davon ob ein Bootloader vorhanden ist oder nicht.
Gruß JoJo
>Wäre es nicht einfacher bei UseWDR=1 immer das gerettete MCUCSR zu>restaurieren? - Dann könnte die Applikation immer gleich sein,>unabhängig davon ob ein Bootloader vorhanden ist oder nicht.
Geht nicht, habe ich probiert. Man kann es nur löschen aber nicht wieder
neu setzen (M162). Wenn ich nur das WDRF lösche dann würde es für die
Anwendung nicht möglich sein darauf zu reagieren.
>Mit den Parametern UseBootMode=0, UseWDR=1 und UseSaveMCUCSR=0 überlebt>das MCUCSR beim M168 ohne besondere Tricks, beim M128 ist es immer>gelöscht (wie beschrieben).
Hm, das sollte eigentlich nicht der Fall sein. Bei UseWDR=1 lösche ich
es ja immer mit xout MCUCSR, zerol.
Ok, Fehler gefunden in der AVRootloader.inc auf folgendes abändern
; some redefinition of register names or bits
.ifndef MCUCSR
.equ MCUCSR = MCUSR
.endif ; .ifndef MCUCSR
Dämliche ständige Umbenammung der Registernamen durch Atmel. Wenn man
mal eine Librariy universell programmieren möchte muß man ständig seine
Registernamen per umdefinieren.
>unter Win98se folgt dem 'Connect' sofort darauf wieder ein 'Disconnect'.>Auch im Debug-Modus ist kein Grund erkennbar.>Ausprobiert auf zwei Win98-PC und drei WinXP-PC mit identischem AVR-Chip>(M168).
Das deutet darauf hin das die Windows Timer nicht sauber funktionieren.
Im Attachment die Version habe ich mal gefixt und im Debug Modus zeige
ich an ob die Timer sauber arbeiten.
In der INI in der Sektion [Timeouts] KeepAlive=500 setzen.
Es sollte jetzt periodisch "send keepalive" zu sehen sein. Wird die
Verbindung abnormal unterbrochen steht dann "keepalive failed".
Hm, könnte auch am MCUSR-Fehler liegen. Denn wenn im MCUSR/MCUCSR
Register das WDRF gesetzt ist und nicht vor dem Zugriff auf WDTCR
gelsöcht wird vereigert die MCU die neuen Einstellungen. Da durch den
Fehler in der AVRootloader.inc nicht MCUSR sondern MCUCR manipuliert
wurde, wurde auch der WDT nicht korrekt programmiert. Sicherlich stand
er noch auf 17ms Timeout und hat somit den Bootloader terminiert. Ich
denke das es daran liegen wird.
Gruß Hagen
Hi Hagen, ich bins wieder ;)
Habe deine Version 4 getestet und das UartInvert-Problem ist behoben :)
Dafür habe ich aber ein neues Problem. (Benutze die Version vom
09.02.2009) Ob es mit dem Bootloader zusammenhängt weiß ich nicht.
Benutze den ATtiny45 mit der Konfig:
1-Wire auf dem deaktivierten Resetpin. Vcc = 3,3V, Intern 8Mhz. Der Pin
ist nur auf ein Lötauge ausgeführt (Keine weiteren Bauteile dran).
Flashen geht ohne Probleme, dass Programm läuft dann auch sofort an.
Wenn ich jetzt aber die Versorgungsspannung aus- und wieder anschalte,
passiert nischt mehr. Das Programm läuft nicht mehr an. Das kann ich
daran sehen, dass ich im Programm einen Pin als Ausgang setze und HIGH
ausgebe. So nun habe ich aber eine Lösung gefunden, den uC zu laden des
Programms zu bewegen. Pullup-Widerstand am 1-Wire-Pin nach Vcc. Kannst
du mir sagen, warum das so ist? Die RESET-Funktion des Pins ist doch mit
dem FUSE-Bit ausgeschaltet.
PS: In der Software schalte ich den Watchdog sofort ab. Wie gesagt,
sobald das Programm einal läuft geht es. Schalte ich den uC einmal aus,
fährt er aber nicht mehr hoch.
Hier die Konfig aus der asm
UseWDR = 1
UseSaveMCUCSR = 0
UseE2Write = 1
UseE2Read = 1
UseCrypt = 1
UseCryptFLASH = 1
UseCryptE2 = 1
UseVerify = 0
UseVersioning = 1
UseBootVector = 0
UseSpecialFuncs = 0
UseSRAM = 0
UseAutobaud = 0
UseUartInvert = 1
UseRS485 = 0
RX/TX = PB5 (Deaktivierter Resetpin)
Hat es irgendwas mit dem Fix für das MCUCSR Register zu tun?
Nette Grüße
Mark
Um sicher zu gehen immer die neuste Version benutzen.
Du benutzt 1-Wire-TTL-Pegel und da ist es wichtig das extern ein Pullup
angeschlossen ist. Normalerweise ist das der Fall über den 2k7
Widerstand zwischen deinem RX-TX Pin am Pegelwandler. Der Pegelwandler
zieht den TX-Pin ja auf High wenn nichts gesendet wird. Exakt das könnte
das Problem bei dir sein. Der interne Pullup am Pin ist deaktivert damit
der 1-Wire-Source so funktionieren kann das beim Schalten auf Ausgang
der Pin Low-Pegel hat.
Problematisch wird es wenn man diesen vom AVR abtrennt, dann floated der
Eingang. Es ist also in jedem Falle empfehlenswert einen ext. Pullup am
Pin anzuschließen, da der interne nicht benutzt werden kann.
Gruß Hagen
Ah ok, dann ist klar was los ist. Ist intern der Pullup auch bei
UartInvert=0 abgeschaltet? Könnte man nicht den Pullup eingeschaltet
haben und bevor du den Pin als Ausgang benutzt ihn eben abschalten? Oder
soll das Aufgrund des kleinen Codes so sein? Wären ja aber auch nur eine
Hand voll ASM Befehle. Dann könnte man sich den ext. Widerstand sparen.
Ich Frage deshalb, weil ich sieben PCB Boards mit je 16 tinys schon
fertig habe. Aufgrund von Zeitdruck ist da ein neufräsen nicht möglich,
wohingegen die Platinen (bis auf die eine zum Testen) noch nicht
bestückt sind.
PS: Ich kann den neusten Bootloader nicht aufspielen, da auf der
Testplatine schon alles bestückt ist.. ISP ist da bei den 16 vernetzten
Tinys nicht drinne ;)
Besten Dank für die Erklärung! Achja, kannst du den Schaltplan für
1-Wire dann bitte updaten? Da ist kein Pullup drinne. Führt dann wie bei
mir heute dazu, dass es mal geht und mal nicht ;)
Beste Grüße
Mark
Hab grad mal in deinen Quellcode geguckt.
; initialize ports
cbi RX_DDR, RX
.if UseUartInvert && Use1Wire
cbi RX_PORT, RX
.else
sbi RX_PORT, RX <<--- Pullup an für Uartinvert=0//1-Wire :)
.endif ; .if UseUartInvert && Use1Wire
Sehe ich das richtig, dass für UartInvert=0 der Pullup tatsächlich
aktiviert ist? Das wäre für mich ja perfekt :) Dann stelle ich den FTDI
wieder auf invertierenden Modus um, und die Sache läuft :)
Grüße
Ja, bei 1-Wire und UseUartInvert=0 ist der interne Pullp aktiv. Bei
1-Wire mit UseUartInvert=1 ist er nicht drinne. Das hat tatsächlich
Gründe in der Codegröße und dem Timing. Du kannst versuchen ihn am
Anfang des Bootloaders zu aktivieren und in putc: dann ein/ausschalten:
1
; send char
2
putc:
3
de_0
4
cbi TX_PORT, TX
5
rcall waitf
6
rcall waitf
7
ldi cnt, 10
8
com paral
9
put3:
10
tx_out
11
rcall waitf
12
lsr paral
13
brcs put4
14
tx_0
15
put4:
16
rcall put5
17
dec cnt
18
brne put3
19
de_1
20
sbi TX_PORT, TX
21
put5:
22
ret
Sind 4 Bytes mehr Code und ob das wirklch geht weiß ich nicht.
Denn man müsste eigentlich ständig zwischen Eingang+Pullup und
Ausgang+Lowpegel umschalten. Dazu müsste aber die komplette putc und
waitf Routine umgeschrieben werden und deren Timing würde sich um 1 Takt
verändern. Diese Veränderung in der Zyklenanzahl hat es aber insich und
muß im komplettten Timing der UART Routinen bis hin zur Baudrate
Detektion berücksichtigt werden. Gehen tut grundsätzlich ja alles, aber
die Zeit und der Aufwand ist das Problem.
>Achja, kannst du den Schaltplan für 1-Wire dann bitte updaten?
Nö. der ist ja für 1-Wire mit UseUartInvert=0, also direkt an der RS232.
Man kann sogar noch die beiden Dioden rausnehmen, geht auch. Mit dieser
abgespeckten Schaltung habe ich 1-Wire mit UseUartInvert=0 und 1
erfolgreich getestet. Allerdings mit einem echten RS232-Pegelwandler von
Maxim. Kann schon sein das der FTDI sich da anders verhält. Ist ebenso
beim Spare-RS232 auf dem STK500 so, die haben da eine Schutzbeschaltung
eingebaut.
>PS: Ich kann den neusten Bootloader nicht aufspielen, da auf der>Testplatine schon alles bestückt ist.. ISP ist da bei den 16 vernetzten>Tinys nicht drinne ;)
Du hast also schon fest eine alte Version des Bootloaders drauf ?
Bedenke das je nach Version du in der AVRootloader.ini dann [Timeouts]
Options=2 setzen musst. Damit der Connect mit der alten BootSign Methode
arbeitet.
Gruß Hagen
>Das hat tatsächlich Gründe in der Codegröße und dem Timing.
Oki
>Diese Veränderung in der Zyklenanzahl hat es aber insich und>muß im komplettten Timing der UART Routinen bis hin zur Baudrate>Detektion berücksichtigt werden.
Reicht ja, dass ich es jetzt weis^^
>Nö. der ist ja für 1-Wire mit UseUartInvert=0, also direkt an der RS232.
Ein Vermerk, dass die Beschaltung eben nur für den Mode gilt, kann nicht
schaden.
>Du hast also schon fest eine alte Version des Bootloaders drauf ?
Es ist schon die Version 4 nur eben nicht der letzte Fix mit dem MCUCSR
Register.
>>Du hast also schon fest eine alte Version des Bootloaders drauf ?>Es ist schon die Version 4 nur eben nicht der letzte Fix mit dem MCUCSR>Register.
Du nutzt ATMega8, kein Problem bei diesem da dessen Register MCUCSR
heist.
ATTiny45 ist wiederum ein Problem dessen Register heist MCUSR.
Das sind so die miesen Stolperfallen durch Atmel die einem
Programmiererleben die Munition für Herzinfarkte liefern ;)
By the Way: großen Respekt für die Entwickler vom WinAVR GCC die solche
Probleme der Standardisierung mit Sicherheit auch kennen werden.
>>Nö. der ist ja für 1-Wire mit UseUartInvert=0, also direkt an der RS232.>Ein Vermerk, dass die Beschaltung eben nur für den Mode gilt, kann nicht>schaden.
Ich werde das Schematik anpassen wenn ich die Zeit dafür finde.
Grundsätzlich geht es eben auch ohne "Pullup" wenn man den
Serienwiderstand zwischen RX/TX am Pegelwandler mit betrachtet. Sauber
ist es nicht, das stimmmt.
Gruß Hagen
Hallo Hagen,
sorry das ich mich erst jetzt melde.
Das Problem mit Win98 besteht weiterhin (keepalive failed, terminate
connection). Falls Du noch eine Idee bezüglich der Timer hast dann gut,
ansonsten werde ich wohl über eine Verschrottung der Werkstattrechner
nachdenken müssen. Vielleicht gibt es ja dafür auch noch eine
"Abwrackprämie".
Gruß JoJo
> keepalive failed, terminate connection
das bedeutet "create timer" und "release timer" und "send keepalive"
sisht du in dem Protokoll. Das heist die Timer funktionieren, nur der
Bootloader im AVR antwortet nicht auf das Keepalive Kommando. Falsch
Version ? falsch konfiguriert ?
Was seht bei [timeouts] ? Mal Wert Base auf 50 oder 100 hochgesetzt ?
Neuste Version mit dem BugFix für das MCUCSR benutzt ?
Gruß Hagen
Ja, das Problem tritt ja auch nur bei den Win98-Rechnern auf.
Bei den WinXP-Rechnern läuft alles einwandfrei. Bootloader ist auch neu
compiliert. Win98-Protokoll als Anlage.
Gruß JoJo
>12.02.09-17:00:51-090 > send appcmd $0A 0A 2A 52 53 54 0A>12.02.09-17:00:51-090 > send ident $00 00 00 00 00 00 00 00 00 0D 42 4F 4F
54
>12.02.09-17:00:51-200 > send appcmd $0A 0A 2A 52 53 54 0A>12.02.09-17:00:51-200 > send ident $00 00 00 00 00 00 00 00 00 0D 42 4F 4F
54
>12.02.09-17:00:51-260 > received data $C2 94 06 04 08 30
1.) nimm mal bitte die $0A aus deinem AppCmd raus, mindestens das 0A
Zechen am Ende des AppCmd.
Die Zeichen 0A,0B,0D,0F,85,87,C3,E1 werden von der Baudrate Detektion
erkannt und an Hand dieser die Baudrate berechnet.
Grundsätzlich betrachtet dürfte das kein Problem darstellen da die
neuste Version nur eine Verbindung akzeptiert wenn sie das exakte
BootSign empfängt und anschließend eine gültige 2 Bytes CRC über diese
BootSign.
2.) der AVR antwortet mit
C2 -> Error CRC
94 06 04 08 -> BootInfo
30 -> SUCCESS Code
Das er überhaupt C2 absendet deutet darauf hin das du garnicht die
neuste Version auf deinen AVRs installiert hast. Denn nur mit der alten
Version kann es zu solchen Synchronisationsproblemen der internen FSM
beim Verbindungsaufbau kommen, in Verbindung mit dem Connect Aufbau der
neusten Version. Das er rausfliegt ist dann nämlich logisch.
Der alte Source empfängt nach dem BootSign noch 2 Bytes der CRC über
dieses BootSign für die neue Version. Diese landen erstmal als Kommandos
in der FSM des Bootloaders. Er erwartet noch 2 weitere Bytes die die CRC
darstellen. Das erste mal nach einem Connect bei dem die PC-Software ein
Befehl absendet ist beim Keepalive wenn du nur verbindst. Der AVR
empfängt die ersten 2 Bytes dieses Befehles als 2 Bytes CRC des
vorherigen Befehles und sendet ErrorCRC als Antwort, meine PC-Software
disconnected dann.
3.) du benutzt "BOOT" als BootSign was der Standard der alten Version
ist. Die neuste benuzt "BOOTLOADER".
(und ich benutze dabei nur meine Glaskugel und mein Hirn)
Ergo wie oben in einigen Postings zu lesen war:
1.) Setze [Timeouts] Options=3 oder =2 um den alten Verbindungsaufbau
zur alten Version des Bootloaders zu aktivieren. Dann dürfte es sauber
laufen.
2.) du hast auf deinen AVRs mit Sicherheit die alte Version installiert.
Wenn du updatest dann [Timeouts] Options=1 oder =0 setzen.
3.) man erkennt an Hand solcher Fehler das die interne FSM sehr stabil
gegen Protokollfehler ist. Schlimmer wäre es nämlich wenn sie in einem
solchen Fall zb. den FLASH löscht oder falsch programmiert.
Gruß Hagen
Hallo Hagen,
beim mir funktionieren die Versionen 2,3 und 4 deines Bootloaders
bestens und waren bisher auch sehr wertvoll für mich.
Die PC-Seite ist ein Acer-Notebook und die AVT-Seite ein Mega32 mit FTDI
FT232R.
Jedoch mit einem Asus Netbook bekomme ich leider keinen Connect mit der
selben AVR Hardware. Habe alle Versionen durchprobiert.
Mit deiner am 26.01.2009 geposteten Version (V3.0), mit Debug=1 zeigt
das Protocol für den Acer folgendes:
22.02.09-15:55:34-393 > Connecting on port COM3...
22.02.09-15:55:34-453 > Switch to 2-Wire mode
22.02.09-15:55:34-513 > received: $95,$02,$03,$08,$37
22.02.09-15:55:34-533 > Device connected
Beim Asus Netbook bekomme ich die gleiche Sequenz ad infinitum aber kein
Connect, bis ich Abort Connect drücke.
22.02.09-11:55:16-187 > Connecting on port COM3...
22.02.09-11:55:16-265 > Switch to 2-Wire mode
22.02.09-11:55:16-328 > received: $95,$02,$03,$08,$37
22.02.09-11:55:16-390 > received: $95,$02,$03,$08,$37
22.02.09-11:55:16-468 > received: $95,$02,$03,$08,$37
Meine Einstellungen sind:
.equ UseWDR = 1
.equ UseAutobaud = 0 .equ UseVerify = 1 .equ UseE2Write = 1
.equ UseE2Read = 1 .equ UseSRAM = 0 .equ UseCrypt = 1
.equ UseCryptFLASH = 1
.equ UseCryptE2 = 1
.equ UseVersioning = 0 .equ UartInvert = 1
.
.
.set XTAL = 16000000
.set BootDelay = XTAL/4
.set BootBaudrate = 115200
.set BootVersion = 3
.set BootCodeSize = 824
Hi Heinrich,
lade dir mal die neuste Version
Beitrag "Re: AVR-Bootloader mit Verschlüsselung"
Entpacke sie in einen separaten Ordner, wir sind nur an der neuen
PC-Software interessiert.
Im Ordner \Windows\ ist die neuste PC-Software. Setze alle Parameter
deren AVRootloader.ini auf die in deiner aktuellen AVRootloader.ini.
Zusätzlich [Timeouts] Options=3. Der Parameter Debug= der alten Version
ist entfernt worden und befindet sich als Bit in Options.
Nun starte diese neue Version und versuch eine Verbindung zum AVR mit
alten Bootloader.
Wenn das nicht funktioniert versuche sukzessive in [Timeouts] die Werte
für Base und Connect zu erhöhen. Zb. Base=100 und Connect=50 oä.
Bei solchen virtuellen Treiber wie dem FTDI eg. USB-Serialwandler sollte
Base auf minimal 50ms stehen.
Ein weiteres Problemfeld könnte der virtuelle Treiber des FTDIs auf
diesem Notebook sein. Mal reinstallieren.
Achso, und schau mal in die Datei AVRootloader.dev rein und suche nach
9502=, dort muß bei dir dann folgendes stehen
9502=1E9502, ATmega32 , 32768, 1024, 2048, 96, 128, 4, 8, 16, 32
Nur die AVRs in dieser Datei werden erkannt. Man kann also durch die
Editierung dieser Datei bestimmte AVRs ausschließen oder neue AVRs
nachträglich dem Bootloader mitteilen.
Gruß Hagen
Ich sehe gerade du hast UseAutoBaud=0 gesetzt. Es könnte sein das das
Timing des AVR-RS232 und FTDI-RS232 nicht exakt übereinstimmt. Deshalb
normalerweise immer UseAutobaud=1 setzen. Ich weiß nicht wie der FTDI
sein Timing erzeugt, es ist eigentlich unlogisch das das vom USB Host
abhängen sollte, aber vorstellbar ist heutzutage alles.
Andererseits empfängt ja die PC-Software eine gültige Rückmeldung vom
AVR. Ich denke also das mit der neuen PC-Sofwtare und höheren
Timeouts.Base das problem beseitigt sein sollte.
Gruß Hagen
Hallo Hagen,
der Connect geht jetzt mit deiner neuen PC-Version auf beiden Notebooks.
In der INI musste ich nix ändern. Ich werde jetzt noch Testen ob die
neue PC-Version auch mit allen anderen Bootloader Versionenen auf beiden
PC's funktioniert.
Deine Unterstützung ich echt super und das auch noch am Sonntag.
Gruß Heinrich
Alle PC-Bootloader sollten vollständig abwärtskompatibel sein. Nur bei
der neusten Version muß man in der .INI bei [Timeouts] Options=0 oder 2
setzen wenn man mit der alten oder neuen AVRootoader.ASM arbeitet. Dh.
das Bit #1 = 2 muß in Options bei der neusten PC-Software gesetzt sein
wenn man mit dieser eine ältere AVRootloader.ASM verbinden möchte.
Options=0 muß gesetzt sein wenn mit der neuen PC-Software auch mit der
neusten AVRootloader.ASM verbunden werden soll. Der Hintergrund ist eine
Änderung beim Verbinden mit dem Bootloader. In der neusten Version
erwartet der Bootloader nach dem Empfang des BootSigns noch eine 16 Bit
CRC über das zuvor empfangene BootSign. Dies beseitigt ein kleineres
Problem der älteren Versionen und macht den Verbindungsaufbau stabiler
und sicherer (wenn man das BootSign als Passwort betrachtet).
Ansonsten ist jede Version zu 100% abwärtskompatibel, was ich auch als
wichtig erachte wenn man zb. schon fertige Geräte mit älteren
AVRootloader Versionen updaten möchte.
Allerdings, wie du siehst, habe ich einiges an den PC-Softwares
verbessert um den Gesamtprozess der Kommunikation stabiler und auch
performanter zu machen.
Am Kommunikationsprotokoll selber hat sich, bis auf zwei Punkte, rein
garnichts geändert. Die zwei Punkte sind:
1.) neues Kommando 0xFD hinzugekommen. Dies ist nun das offizielle
"KeepAlive" Kommando und im Grunde nur ein Platzhalter. Dh. im
AVRootloader.ASM musste dafür garnichts geändert werden, es wird auf PC
Seite erwartet das der AVR mit 0xC3 = unbekanntes Kommando, antwortet.
Es dient nur dazu den Watchdog Timer im AVR zurückzusetzen. Dieser wird
bei jedem Kommmando zurückgesetzt falls UseWDT=1 gesetzt ist.
2.) bei UseVersioning=1 hat sich der Aufbau des ersten verschlüsselten
Initialisierungs-Blockes verändert. Statt 16 Bytes hat dieser Datenblock
dann 24 Bytes Größe. In den zusätzlichen 8 bytes ist die
Versionsnummernüberprüfung verschlüsselt kodiert. Da die alten
Bootloader Versionen das Versioning nicht unterstützen ist auch hier die
Abwärtskompatibilität sicher gestellt.
Ansonsten ist es eh immer so das nur verschlüsselte ACY Dateien
geupdated werden können die 1 zu 1 zur jeweiligen Bootloaderversion
erzeugt wurden. Dh. PC-Software-Version 3 kann nur ACY erzeugen für
Bootloader Version 3. Eine ACY erstellt mit Version 3 kann nicht auf
AVRs mit Bootloader Version 4 oder 2 installiert werden. Das mag im
ersten Moment eine starke Restriktion darstellen aber hier gilt aus
meiner Sicht die kryptographsiche Sicherheit als Priorität. Wenn
gewünscht kann das aber durchaus verändert werden, so daß die
PC-Software für den Bootloader der aktuell verbunden ist eine
versionerichtige ACY Datei kompiliert. Das aalles gilt aber nur bei
aktivierter Verschlüsselung.
Gruß Hagen
Hallo zusammen,
ich habe den Bootloader erfolgreich auf einem ATTiny25 installiert und
er funktioniert soweit sehr gut. Ich benutze den 1-wire Mode an PB0.
Wenn ich aber PB5 zuschalte (RSTDISBL) dann kann ich keine Verbindung
mehr zum Bootloader herstellen. Ich wollte aber gern PB0 freimachen und
PB5 benutzen. Hat einer eine Ahnung woran das liegen kann? Desweiteren
bekomme ich auch keinen Zugang wenn die Taktfrequenz des Tiny nur 1 MHz
beträgt. Ist das einfach zu wenig für die Baudrate Detektion?
Gruß Rene
Es ist zum Verrücktwerden...
ich kriege es einfach nicht hin.
Habe den atmega128 und probiere es gerade mit dem JTAGmkII es zum laufen
zu bewegen. aber es klappt einfach nicht.
Habe einen ftr232 und da die RX/TX auf den µP gelegt RX->TX TX->RX
in den Dateien die entsprechenden änderungen gemacht, aber es klappt
alles nicht.
UART zwischen PC und µP klappt, aber sobald ich einen Bootloader
reinmachen will, funktioniert es nichtmehr.
Wie muß ich denn die Fusebits im AVR Stuio setzen?
Ich hoffe das mir einer helfen kann...
Gruß
Horst
@Rene
Hast du vor dem Setzen des RSTDISBL Flags, Hagens ASM Datei geändert,
dass PB5 der 1-Wire-Pin ist und vorher auch geflashed?
Habe den Bootloader auf einem ATtiny45 laufen. Benutze aber eine feste
Baudrate von 115200 mit internen 8Mhz.
Ja habe ich, aber auch wenn ich den 1 Wire an PB0 lasse und nur RSTDISBL
setze geht es schon nicht mehr. Das finde ich sehr komisch. Benutzt du
PB5 (Reset) für 1-Wire? Kannst du das mal für mich überprüfen?
Gruß Rene
Ja ich benutze den Resetpin. Um in den Bootloader zu kommen, musst du
erst auf "Connect" gehen, dann die Spannung kurzzeitig unterbrechen. So
gehts bei mir. Wenn das geht, kannst du auch nen Pin-Change-Interrupt
nehmen um aus der Applikation in den Bootloader z.B. per Watchdogreset
zu kommen.
Hmm, genauso mache ich es. Hast du das 1-Wire Interface aus dem Archiv?
Benutzt du einen externen Pullup mit welchem Wert? Fragen über Fragen.
;-)
Gruß Rene
@Rene und allen anderen:
Wenn ihr solche Probleme habt dann postet hier doch bitte
- eure Konfiguration aus AVRootloader.asm, also alle UseXYZ=?, BootSign
usw. Einstellungen
- macht einen Verbindungsversuch mit der PC-Software (Button Connect...)
mit in der AVRootloader.INI eingestellten Option "Debug=1" bzw. bei
neuster Version Optionen=1. Im Protokoll Fenster (Memo) die ganzen
Meldungen hier per Copy&Paste einfügen
- beschreibt eure Hardware, also 1/2-Wire, direkt an RS232 oder an
MAX/FTDI Pegelwandler
- beschreibt welche Fuses ihr gesetzt habt, am Besten so wie sie
AVRStudio benennt, nicht AVRDude oder andere Programme die das wieder
anders handeln
Habe ich diese Infos dann kann ich auch konkreter helfen.
So Rene, wenn du UseUartInvert=1 hast dann musst du einen PullUp nach
VCC vom PB0 legen.
Gruß hagen
Hallo Hagen,
danke für deine ausführlichen infos zu den Versionen und deren
Kompatibilität. Ich bin jetzt aber etwas verwirrt und zwar aus folgendem
Grund:
Ich kann mich mit deinem PC-Bootloader V4.0 vom 10.2.09 trotz Option=0
mit einem AVRootloader welcher mit V2.0 erzeugt wurde verbinden und eine
mit V.2 erzeugte ACY erfolgreich flashen.
>Ich kann mich mit deinem PC-Bootloader V4.0 vom 10.2.09 trotz Option=0>mit einem AVRootloader welcher mit V2.0 erzeugt wurde verbinden und eine>mit V.2 erzeugte ACY erfolgreich flashen.
Ja geht auch beides ;) Aber man sollte bei der V4.0 Version den Connect
Prozess eben auf V3 und drunter einstellen, ist besser. Ohne diese
Änderung gehts auch, aber die FSM im Bootloader kommt durcheinander und
meldet einmalig ErrorCRC für das nächste Kommando das die PC-Software
sendet. Da alle Kommandos der PC-Software beim Fehler ErrorCRC bis zu 6
mal versuchen ihren Befehl auszuführen, gehts auch ohne diese
Einstellung. Dh. bei jeder Aktion der PC-Software gibt es ma. sechs
Versuche wenn ein CRC Fehler aufgetreten ist. Das macht die Sache so
stabil.
Und natürlich kannst du ein ACY, erzeugt mit einer älteren Version,
defakto mit jeder anderen Version auf einen AVR mit der gleichen Version
flashen lassen. Auch das ist so beabsichtigt und habe ich oben auch so
gemeint. Man kann nicht ein ACY mit zb. Version 3 auf einen AVR mit
Version 2 flashen. Man kann nicht mit PC-Software Verson 4 ein ACY für
AVR mit Version zb. 3 erzeugen. Aber ausführen kann jede
PC-Software-Version jede ACY Version.
Man muß da differenzieren zwischen ein ACY erzeugen, quasi kompilieren,
und als Script später auszuführen (Program Button). ACY Dateien sind
also sowas wie binäre Scripte deren Datenblöcke verchlüsselt sein können
und nur von AVRs akzeptiert werden die die gleiche Version wie die des
ACY haben, mit dem gleichen Passwort verschlüsselt wurden und wenn
UseVersioning=1 gesetzt ist muß deren Versionsnummer gleich oder höher
als die des AVRs sein.
Gruß Hagen
Korrektur: Ich habe nochmal in meine ToDo-Liste nachgeschaut und es ist
bei den ACY Files so:
Ab Version 3 kann man für jede beliebige AVR-Bootloader Version ein ACY
kompilieren/erzeugen. Die PC-Software benötgt ja erstmal eine Verbindung
zum Bootloader wenn sie eine ACY Datei erzeugen soll. Sie benutzt also
immer die Optionen und Versionsnummer die auf dem AVR installiert ist.
Man kann also, entgegen meinem vorherigen Statement, ohne
Versionskonflikte/Einschränkungen ACY Dateien erzuegen und ausführen
lassen. Das war aber bis zur Version 2 der PC-Software anders. Sorry für
diese Mißverständnisse aber so langsam bei der gewachsenen Komplexität
kann man auch mal durcheinander kommen ;)
Gruß Hagen
Hey Hagen,
ich habe jetzt nochmal einen Test mit InvertUart=0 und den Tinys
durchgeführt. Ausgangssituation war wieder, keine externe Beschaltung am
1-Wire Pin. Der FTDI wird bei bedarf mit einer Prüfspitze verbunden.
Mit InvertUart=1 ist der Pullup ja deaktiviert und der Tiny kam nicht
ins Hauptprogramm. Mit einem nachträglich Pullup war alles i.O. Ich habe
gedacht, dass bei InvertUart=0 der Widerstand entfallen kann. Nach dem
letzten Test weis ich es nun aber besser ^^ Statt eines Pullups braucht
man dringend einen Pulldown. Lässt man ihn weg, startet der uC wieder
nicht.
Was ich irgendwie nicht ganz verstehe ist, dass du in deinem Schaltplan
den 1-Wire Pin auch nur bei Bedarf über den Steckverbinder C1/C2
anschließt.
Startet denn dein uC bei unbeschalteten 1-Wire-Pin?
Es wäre natürlich cool, dass der uC auch hochfährt, wenn keine
Flankenänderung am Pin bei vorliegt.
Mir fällt noch ein Feature für die Programmiersoftware ein. Es wäre ganz
nützlich, wenn man eine andere Baudrate für das Senden des AppCmd
benutzen könnte als für das Flashen. Arbeite mit fester Bootloaderbaud
von 115200, in der Software aber mit 1,25Mbaud. Muss mir momentan mit
nem PinChangeInterrupt arbeiten, was nicht so praktisch ist. Würde
absolut reichen, wenn die AppBaud in der ini einstellbar wäre. Ist aber
nur ne Idee.
Grüße Mark
Ich benutze 1-wire direkt ohne Pegelwandler (max232 o.ä.) nur einen
Widerstand zwischen RXD und TXD. Wie gesagt benutze ich PB0 - 4 gehts
ohne Probleme. Sowie PB5 (RESET) ins Spiel kommt gehts nicht mehr.
Natürlich habe ich dann mit den neuen Einstellungen geflasht.
Die Fuse stehen so:
http://www.bogenschuetzen-moenchengladbach.de/share/Fuse.gif
Gruß Rene
@Mark:
Du benutzt aber immer den FTDI egal ob UseUartInvert=0 oder 1 ist. Neben
dem PullUp/Down wie du ihn benutzt könnte vielleicht noch die Erhöhung
des 2k7 Widerstandes zwischen RX-TX helfen. Auf alle Fälle benötigt man
bei UseUartInvert=1 einen externen PullUp der natürlich auch
entsprechend den Pegeln des FTDI + 2k7 Widerstandes dimensioniert ist.
Bei UseUartInvert=0 ist das im Grunde auch so, meine Empfehlung basiert
halt eben auf realen RS232 Pegeln von +-15 Volt bzw. +-10V bei USB-RS232
Wandlern.
In diesem Modus wird der Pin auf Weeak/Strong Pullup gewechselt beim
Empfangen und Senden.
Ich schätze mal das es am FDTI und seinen Pegeln liegen wird. An der
Software selber kann man nur noch wenig daran verändern, bzw. ganz
allgmein gesprochen kann man daran wenig was ändern. Das ist bei einer
I2C/1-Wire Software ebenfalls so.
Das mit der unterschiedlichen Baudrate:
Programmierbar ist im Grunde alles, nichts ist unmöglich solange es der
Physik unterliegt ;) Aber konzeptionell wäre es eine größere
Veränderungen in der PC-Software. Sobald das IApplication Objekt ein
IAVRootloader Protokollobjekt erzeugt, hat die Applikation schon ein
ICOM = Kommunikationsobjekt mit entsprechend eingestellter Baudrate
erzeugt. Das IAVRootloader-Protokollobjekt hat dann im späteren Verlauf
keine Zugriffe auf diese Funktionalität, es kann nur die
Senden/Empfangen Funktionen benutzen. Das nennt sich Kapselung in der
OOP und soll eine striktere Hierarchisierung im Source des
Programmierers bewirken und somit logischen Fehlern vorbeugen. Lange
Rede kurzer Sinn: konzeptionell ist dein Wunsch nicht vorgesehen worden
und das bedeutet einen höheren zeitlichen Aufwand für mich. Wenn es dir
nichts ausmacht lege ichs erstmal in die ToDo Liste für die nächste
Version ab ;)
Gruß Hagen
@Rene:
das sieht erstmal gut soweit aus, also da wo es korrekt läuft ;)
Beim 2. Protokoll kann man sehr gut erkennen das der AVR nicht
antwortet.
Es gibt nun einige Vorschläge um das Problem systematisch anzugehen:
1.) setze UseVersioning=0
2.) setze BootMsg auf leer -> BootMsg: ;.db "deine Nachticht", bloß das
Semikolon rein
Ich denke aber das dies nicht das Problem beseitigt.
3.) baue einen PullUp vom Pin nach VCC rein, 10-100K. Es könnte sein das
der Resetpin keinen Pullup verbaut hat oder dieser anders dimenstioniert
ist. Wobei bei meinem ATTiny461,44 und 85 benutze ichz auch immer den
Resetpin für den Bootloader, und das hat bisher immer funktioniert.
Ich meine das könnte am ehesten helfen.
Es muß ja einen Unterschied zwischen PB5 und den anderen Pins geben und
da fällt mir momentan nur der interne Pullup ein.
Wie programierst du eigentlich dann deinen Tiny45 im Nachinhein, per
Highvoltage-Parallel-Programming ? Bedenke das solange das Debugwire am
RESET noch aktiv ist das Verhalten des internen Pullups an PB5 sich
unterscheidet, irgendsowas läutet mir im Hirn gerade rum.
Wenn du aber den RESET als gleichwertigen Pin gefust hast dann sollte
Debugwire und ISP deaktiviert sein. Das bedeutet nur noch Highvoltage
Programming kann den AVR zurücksetzen.
Gruß Hagen
@Hagen
>Du benutzt aber immer den FTDI egal ob UseUartInvert=0 oder 1 ist.
Korrekt :)
>könnte vielleicht noch die Erhöhung des 2k7 Widerstandes zwischen RX-TX >helfe
ehm... also vielleicht haben wir uns irgendwie missverstanden. Solange
der FTDI am Pin angeschlossen ist, funktioniert alles einwandfrei in
allen Modi auch ohne externen Widerstand sei es Pullup oder Pulldown.
Der Punkt ist, dass es nicht funktioniert wenn der FTDI ABGEKLEMMT ist.
Der uC springt dann nach einem Restart nicht vom Bootloader ins
Hauptprogramm (Vgl. in deinem Schaltplan C1/C2 NICHT verbunden).
Hintergrund ist einfach, dass ich einen Pin nicht dauerhaft für das
Programmieren "verschwenden" will.
Grüße
>Der Punkt ist, dass es nicht funktioniert wenn der FTDI ABGEKLEMMT ist.>Der uC springt dann nach einem Restart nicht vom Bootloader ins>Hauptprogramm (Vgl. in deinem Schaltplan C1/C2 NICHT verbunden).
Hm, dann floated der Pin. Aber das sollte nur bei UseUartInvert=1 der
Fall sein und deswegen auch der ext. Pullup.
Wenn die Pegel am Pin stabil sind dann sollte der Bootloader nach
BootDelay Millisekunden, standardmäßig 250ms die Anwendung aufrufen.
Nun kommt es darauf an ob du UseWDT=1 gesetzt hast. Wenn ja muß deine
Anwendung den Watchdog frühzeitig deaktivieren oder ihn selber
periodisch zurück setzen. Er steht auf 2 Sekunden Timeout. Das heist
auch das BootDelay in diesem Fall niemals größer 2 Sekunden gesetzt sein
darf.
Falls du eine LED am AVR hast dann schalte sie doch mal im Bootloader
ein und in deiner Anwednung wieder aus.
Gruß Hagen
Moin Moin,
ja UseWDT ist eingeschaltet und InvertUart=0 und im Hauptprogramm
deaktiviere ich den Watchdog sofort, daran liegts nicht. Auf dem Osi
kann ich sehen, dass der uC nach den 2s neustartet (kurzer Low-Pulse auf
dem 1-Wire-Pin alle 2s).
Also bei den Test fährt der Controller nur hoch, wenn ein Low-Pegel am
1-Wire Pin anliegt, sonst tut sich gar nichts. Kannst du mal gucken, ob
du es nicht tatsächlich so programmiert hast?
Hallo Hagen,
vielen Dank für deine Arbeit mit dem Bootloader.
Ich verwende ihn um einen ATTiny85 im 1-Wire-Modus(ohne Verschlüsselung)
zu flashen.
In meiner Applikation werden sofort nach dem Anlegen der Versorgung
Taktsignale mit 22ms Periode auf den INT0 Eingang gegeben.
Ursprünglich sollte dieser Eingang auch als 1-Wire-Eingang genutzt
werden.
Das hat aber nicht funktioniert - die Applikation wurde nie ausgeführt.
Ich vermute das durch die Taktsignale der Bootloader ständig getriggert
wurde und nie in die Applikation gesprungen ist.
Habe dann einen - in der Applikation - als Ausgang beschalteten Port als
1-Wire-Port benutzt und so funktioniert es auch.
Gruß und schönes Wochenende
bandgap
Solange am Bootloader Pin sich irgendwas tut so lange verbleibt der
Bootloader in der Connect/Autobaud Schleife. Erst wenn für BootDelay
Millisekunden am Pin Ruhe ist springt er die Anwendung an. Das war in
älteren Versionen anders. Dort musste innerhalb von BootDelay
Millisekunden ein gültiger Connect String empfangen werden, ansonsten
sprang er die Applikation an. Nun, je nach Sichtweise verbessert oder
verschlechtert die eine oder andere Lösung das Gesamtverhalten und das
auch noch abhängig von Eurem eigenen HW-Aufbau.
Ich denke nochmal darüber nach und werde wahrscheinlich dieses Verhalten
konfigurierbar im ASM machen. Ansich kein großer Aufwand. Aber zuerst
mal versuche ich das Problem vom Mark C. nachzuvollziehen und zu lösen.
Danach werde ich erstmal dieses Projekt ruhen lassen, mitlerweile hat es
doch einiges an Zeit gekostet.
Gruß Hagen
Version 5.0
Ich hoffe das dies erstmal die letzte Version ist ;)
- das von Mark C. beschriebene Problem ist erstmal beseitigt
- mit UseResetDelay=0 oder 1 stellt man das Timeout Verhalten des
Bootloaders ein. Ist UseResetDelay=1 gesetzt so muß am RX Pin für
BootDelay Millisekunden Ruhe herrschen. Sobald sich am RX Pin was tut
wird der Timeout immer auf BootDelay Millisekunden verlängert.
Ist UseResetDelay=0 so handelt es sich bei BootDelay um ein
Gesamttimeout. Dh. nach spätestens BootDelay Millisekunden ohne
korrekten Verbindungsaufbau wird die programmierte Anwendung gestartet.
- UseSpecialWrite, UseSpecialWriteBoot, UseSpecialRead, UseSpecialMsg
sind neu. Mit ihnen steuert man welche der Spezialfunktionen für den
Zugriff durch die Anwendung eingebunden werden sollen.
UseSpecialWrite=1 bindet die Funkton write_flash(address, size, buffer)
ein. Mit dieser kann man den FLASH aus der Anwendung heraus
programmieren. Dabei muß man aber nich auf irgendwelche
Addressausrichtungen etc.pp. achten. Dh. man kann mit dieser Funktion
zb. 5 Bytes aus dem SRAM an eine FLASH Adresse schreiben ohne das
Pagealigment/boundary der FLASH-Pages beachten zu müssen.
UseSpecialWriteBoot=1 aktiviert die Möglichkeit in den Bootloader FLASH
Bereich schreiben zu können. Abgesichert wird das durch einen Magic Code
und die Lockbits müssen entsprechend gesetzt sein. Ob man das aktiviert
muß jeder selber wissen. Das M162 Test Projekt im Ordner \test\ macht
davon Gebrauch um das Passwort BootKey der Verschlüsselung aus der
Anwendung heraus zu ändern.
UseSpecialRead=1 aktiviert die Funktion read_flash(address, size,
buffer) mit der man einen Speicherbreich des FLASHs in den SRAM lesen
kann. Hilfreich ist dies wenn man per Lockbits der Applikation verbietet
den FLASH auslesen zu können, zb. Bootloader Section.
UseSpecialMsg=1 aktiviert die Funktion um auf die BootMsg: zugreifen zu
können. Also um zb. den Wert in BootMsg = Copyright oder BootInfo in der
eigenen Anwendung anzeigen zu lassen.
Das WinAVR GCC Test projekt für den M162 demonstriert den Zugriff auf
diese Anwendungsbezogenen Funktionen.
Gruß Hagen
Hallo,
ich habe den Bootloader in der Verion3 schon zum Laufen bekommen. Nun
probiere ich gerade an der neusten Verion 5 herum und habe Probleme, die
ich mir nicht erklären kann.
Ich bekomme eine Verbindung zum Bootloader - die wird aber nach ca. 250
ms sofort wieder beendet - warum ist das so?
Inhalt des Protokollfensters:
03.03.09-12:07:40-390 > Connecting on port COM28...
03.03.09-12:07:42-765 > Device connected
03.03.09-12:07:43-000 > Device disconnected
Device Information:
Connection : 2-Wire
Device name : ATtiny45
Device signature : 1E9206
SRAM size : 256 Byte
EEPROM size : 256 Byte
FLASH size : 4096 Byte
FLASH size for application : 3584 Byte
FLASH pagesize : 64 Byte
Bootloader size : 512 Byte
Buffersize for data : 216 Byte
SRAM start address : 96
Bootloader version : 5
Use bootsection : No
Versioning supported : Yes
Cryptography supported : No
Application software version : not defined
Application version address : 0x000DFA
Ich habe bereits versucht dem Problem durch Anpassen der Timeouts
entgegen zu wirken - bisher leider erfolglos. Bisher gelang nur das
Auslesen der Device Information.
Den ATtiny takte ich intern mit 128 kHz - deshalb nutzte ich für den
Bootloader auch nur 1200 Baud.
Hat jemand vielleicht einen Hinweis für mich?
Gruß Peter
Hallo...
hat schon mal jemand den RS485 getestet ?
Habe bei mir am AVR den SN75176 und am PC den Devantec USB-RS485.
Ich sehe das Daten gesendet werden und auch welche zurück kommen (LED's)
nur leider verbindet sie sich nicht.
lg, markus
@Peter:
Hallo,
-hast du sowohl auf dem AVR als auch auf dem PC die neue Version ?
-Aktiviere mal den Debug-Modus des Verbindungsaufbaus (über Timeouts,
Options=1) und poste mal den Connectaufbau.
- welche Option hast du bei UseResetDelay eingestellt ?
- hat der Verbindungsaufbau bei der Version 3 problemlos funktioniert ?
Gruß Stefan
@Stefan R.
Danke für deine Bemühungen. Ich habe in der Zwischenzeit schon weiter
geforscht und meine Befürchtung bestätigt -> es liegt am Watchdog.
Ich poste hier trotzdem nochmal die genauen Protocol-Ausgaben.
1
03.03.09-14:50:45-046 > Connecting on port COM28...
2
03.03.09-14:50:45-046 > Timeout.Connect = 50 ms
3
03.03.09-14:50:45-046 > Timeout.Base = 50 ms
4
03.03.09-14:50:45-046 > Timeout.Erase = 10 ms
5
03.03.09-14:50:45-046 > Timeout.Flash = 25 ms
6
03.03.09-14:50:45-046 > Timeout.Eeprom = 10 ms
7
03.03.09-14:50:45-046 > Timeout.Buffer = 1 ms
8
03.03.09-14:50:45-046 > Timeout.AppCmd = 0 ms
9
03.03.09-14:50:45-046 > Timeout.KeepAlive = 100 ms
Die Timeouts habe ich hier aus Verzweiflung abartig hoch gesetzt. Aber
wie gesagt - nun funktioniert es mit abgeschaltetem Watchdog-Support
(UseWDR=0). Ich hatte bei Version3 keine Probleme mit dem
Watchdog-Support - drum hatte ich diesen als Problemquelle
ausgeschlossen.
Ich werde jetzt weiter beforschen, warum hier der Watchdog-Reset
aufschlägt während der Bootloader läuft.
Übrigens; ich hatte UseResetDelay=1 da ich das für meine Anwendung auch
für sinnvoll gehalten hatte - und wie gesagt; das scheint ja auch nicht
mein Problem gewesen zu sein.
>> Die Timeouts habe ich hier aus Verzweiflung abartig hoch gesetzt. Aber> wie gesagt - nun funktioniert es mit abgeschaltetem Watchdog-Support> (UseWDR=0).
Na immerhin schon mal ein anfang !
> Ich werde jetzt weiter beforschen, warum hier der Watchdog-Reset> aufschlägt während der Bootloader läuft.
Autobaud, Bootdelay, XTal richtig gesetzt ??
> Übrigens; ich hatte UseResetDelay=1 da ich das für meine Anwendung auch> für sinnvoll gehalten hatte - und wie gesagt; das scheint ja auch nicht> mein Problem gewesen zu sein.
Versuch es trotzdem mal mit UseResetDelay=0, man weis ja nie ! :-)
Gruß Stefan
@Peter:
>ich habe den Bootloader in der Verion3 schon zum Laufen bekommen. Nun>probiere ich gerade an der neusten Verion 5 herum und habe Probleme, die>ich mir nicht erklären kann.>Ich bekomme eine Verbindung zum Bootloader - die wird aber nach ca. 250>ms sofort wieder beendet - warum ist das so?
1.) die PC-Software sendet alle Timeouts.KeepAlive Millisekunden ein
KeepAlive Kommand zum AVR Bootloader. Bei dir also alle 250ms. Das
KeepAlive Kommando ist nur ein Platzhalter und der AVR reagiert darauf
mit a) dem Rücksetzen des WDT, b) mit Antwort ERRORCOMMAND, also kein
gültiges Kommando. Wie ich oben schonmal beschrieben habe hat dieses
System zwei Vorteile. Erstens erkennt die PC-Software ob die Verbindung
zum AVR noch lebt und setzt dabei auch noch den interen WDT zurück und
zweites erkennt der AVR beim Ausbleiben dieses Kommandos das die
Verbindung getrennt wurde und lässt den WDT einen RESET durchführen.
2.) alle Anzeichen deuten darauf hin das ein sauberer Connect zum AVR
möglich ist. Probiere nun mal statt einem "manuellen Connnect" gleich
den AVR mit einer Software zu programmieren. Also sofort den "Program"
Button zu klicken statt erst den "Connect" Button. Damit testen wir ob
der AVR, wenn er beschäftigt ist, auch sofort per WDT einen RESET macht.
3.) der Auszug:
03.03.09-14:50:48-453 > send keepalive
03.03.09-14:50:49-453 > Timer released
03.03.09-14:50:49-453 > keepalive failed, terminate connection
zeigt deutlich das der AVR nicht auf das KeepAlive Kommando antwortet,
deine Annahme das der WDT zugeschlagen hat ist also sehr wahrscheinlich.
In Timeouts.KeepAlive hast du 100ms drinnen stehen, ändere das auf 250
oder 500. 100ms düften gehen sollten aber unnötig sein da der WDT auf 2
Sekunden eingestellt sein sollte. Falls nicht so wissen wir schonmal das
er schon früher als 100ms einen Timeout erzeugt.
4.) nun sollten wir mal nachrechnen welche Konsequenzen deine sehr
langsamme Baudrate für das System hat. Ich schätze mal das es damit
zusammenhängt. Dh. der Timeout des WDT ist schneller als die
eigentlichen Kommunikation längerer Kommando-/Datensequenzen bei 1200
Baud. Der WDT wird intern nur beim Warten auf ein Kommando zurückgesetzt
nicht während des Empfanges längerer Datensequenzen. Wir könnten nun
dieses Verhalten verändern indem wir im ASM folgends abändern:
bei putc:
[avr]
; send char
putc: xwdr
de_0
rcall waitf
[/avr]
bei getc:
[avr]
getc: xwdr
get9: rx_1
rjmp getc
[/avr]
und bei main: nun
[avr]
main: ldi paral, SUCCESS
mai1: rcall putc
movw crcl, zerol
; xwdr
rcall getw
[/avr]
das xwdr auskommentieren.
Mit diesen Änderungen setzen wir den WDT nicht bei nur bei jedem
Kommando zurück sondern vor jedem Senden und Empfangen eines Zeichens
über die UART.
Somit gilt der WDT Timeout relativ gesehen zur Baudrate immer für 1
Zeichen über die UART. Beim originalem Source gilt der WDT für eine
komplette Kommandosequenz inklusive allen übertragenen Datenblöcken. Und
das könnte bei 1200 Baud länger als 2 Sekunden dauern.
Ich denke das obige Änderungen dein Problem beseitigen sollten. Deine
Baudrate ist halt sehr langsam eingstellt ;)
Bis zur Version 3 wurde der WDT ganz anders genutzt als ab Version 4. Ab
dieser Version spielt der WDT eine aktiviere Rolle und soll
Verbindungsabrüche erkennen und den AVR zurück setzen und in der
PC-Software die Verbindung automatisch trennen.
Gruß Hagen
@Makrus:
>hat schon mal jemand den RS485 getestet ?
Nein leider noch nicht, du bist also Erster ;) Das ich es bisher noch
nicht slebrr testen könnte hatte ich aber schon oben geschrieben und
darauf hingewiesen.
>Habe bei mir am AVR den SN75176 und am PC den Devantec USB-RS485.>Ich sehe das Daten gesendet werden und auch welche zurück kommen (LED's)>nur leider verbindet sie sich nicht.
Du hast ~RE und DE mit dem DE_PIN am AVR verbunden. Laut Datenblatt
benötigen wir LOW-Pegel wenn wir was empfangen wollen und HIGH Pegel
wenn wir senden wollen. UseRS485Invert=0 setzen. Das Makro "de_1" setzt
dann ~RE und DE auf LOW.
Hast du die Aus/Eingänge A/B richtig herum angeschlossen ?
Nun können wir noch was am Timing des DE Pins verändern. In putc:
[avr]
; send char
putc: xwdr
de_0
rcall waitf
rcall waitf
ldi cnt, 10
...blabla
brne put3
de_1
put5: ret
[/avr]
können wir das "de_0" Makro sukzessive zwischen/hinter "rcall waitf"
verschieben. Vor dem Makro "de_1" können wir ein "rcall waitf" einbauen.
Somit verschieben wir sukzessive die Enablezeiten des RS485 Treibers.
Vieleicht hilft dies ja da zwar das SN75176 sehr kurze Propagationdelay
von par Nanosekunden hat aber der USB-RS485 eventuell ein länderes
Timing benötigt.
Gruß Hagen
Hallo Hagen,
folgende Settings:
UseUartInvert = 0
UseRS485 = 1
wenn ich USERS485Invert = 1 habe dann blinken meine TX und RX leds am
USB-RS485 wandler. Bei 0 blinkt nur die TX led.
RX = PD2
TX = PD3
DE = PD4
~RE und DE sind zusammen am PD4 angeschlossen.
(Nutze damit auch das DMX Protokoll)
habe deine Vorschläge mal ausprobiert, bringt aber keine Änderung.
lg, markus
@Markus:
Als erstes mal in AVRoorloader.ini [Timeouts] Options=1 setzen.
Dann schauen was bei "received data:" drinnen steht und eventl. hier
posten.
Mit den USB Dingern stehe ich so langsam auf Kriegsfuß da deren Treiber
immer so blöde Timingprobleme haben. Ergo: mal [Timeouts] Base=50 bis
100 setzen.
Gruß Hagen
@Markus:
Auf PC-Seite sitzt meine Bootloader Software und greift über einen VCOM
auf den FTDI zu. Der FTDI ist wie konfiguriert ? Müssen irgendwelche
Timings bei dem berücksichtigt werden ? Ich frage weil die RS485 im
AVRootloader nichts anderes wie Halbduplex RS232 ist mit der Erweiterung
das beim Senden einens Zeichens einfach ein Pin seinen Pegel wechselt.
Mehr nicht. Es werden keinen extra Timeouts oder Wartezeiten zwischen
dem Umschalten berücksichtigt noch Irgendwas auf höherer Protokolebene
wie Addressen oder so.
Ich frage mich nämlich ob der FTDI Treiber/HW vollständig transparent
für die PC-Software ihren DE/~RE Pin einstellt.
Gruß Hagen
@Hagen
Also am RX Pin des AVR sehe das Daten kommen (Oszi).
Nur am TX und DE Pin tut sich nix.
Mit einem USB 232TTL wandler geht es wenn ich direkt auf die RX/TX lege.
lg, markus
@Hagen
mit diesen Einstellungen sehe ich Daten auf RX und TX und auf DE. nur
leider kommt kein Connect zustande. Am USB Wandler blinkt auch nur die
TX Led
.equ UseUartInvert = 1
.equ UseRS485 = 1
.equ UseRS485Invert = 0
lg, markus
@Hagen
Hier noch ne Beschreibung.
Automatic Bus Turnaround
The RS485 bus features automatic direction turnaround. Under idle
conditions, where no data is being transmitted or received, the bus will
be in the high impedance listening mode. Any data that arrives on the
RS485 bus will be transmitted via the USB port to the PC. When the PC
transmits data the bus direction immediately turns around to transmit
the data out on the RS485 bus. When the PC stops transmitting data,
there is a 3uS delay to ensure that the final data high gets a firm
drive before setting the bus to idle (listening mode) again.
http://www.robot-electronics.co.uk/htm/usb_rs485_tech.htm
lg, markus
>FT_SetDataCharacteristics(ftHandle, FT_BITS_8, FT_STOP_BITS_2, FT_PARITY_NONE);
Der Bootloader benutzt 1 Stopbit, nicht 2.
>there is a 3uS delay to ensure
Das könnte das Problem sein. Der Bootloader benötigt keine 3µs um vom
Empfangen auf Senden zu schalten. Somit würde der FTDI nach dem Senden
die 3µs warten ohne Empfang und einige Daten verpassen. Man müsste also
im Bootloader ein 3µs Delay einbauen wenn der Bootloader anfängt zu
senden.
Wobei bei einer Baudrate von 115200 sind das in putc am Anfang schon
8.68µs.
Baue mal in getc: folgendes ein
[a]
getc: xwdr
rcall waitf
get5: rx_1
rjmp get5
[/a]
>mit diesen Einstellungen sehe ich Daten auf RX und TX und auf DE. nur>leider kommt kein Connect zustande. Am USB Wandler blinkt auch nur die>TX Led>.equ UseUartInvert = 1>.equ UseRS485 = 1>.equ UseRS485Invert = 0
Protokoll hier posten ;) Ich muß sehen was die PC-Software empfängt für
diese Einstellung. Grundsätzlich sind diese Einstellungen die ich als
korrekt erwartet hätte.
Ach und mit welchem XTAL arbeitet dein AVR ?
Gruß Hagen
Hallo Hagen,
danke für den Hinweis bei putc und getc noch ein xwdr einzufügen.
Das allein hat allerdings noch nich viel geholfen. Ich bekam zwar eine
stabile Verbindung - konnte dann aber FLASH und EEPROM nicht schreiben
(ICOM Error).
Ich habe dann zusätzlich noch den Watchdog-Timer auf 4 Sekunden erhöht.
Jetzt läuft alles wie es soll. Ausgezeichnet!
Schöne Grüße - Peter
>Ich habe dann zusätzlich noch den Watchdog-Timer auf 4 Sekunden erhöht.
Hm, das heist dann aber das die Programmierzeiten durch deinen so
niedrigen CPU_Clock so enorm langsam sind. In meinen EEPROM
Schreibroutinen habe ich das Zurücksetzen des WDT vor jedem
programmierten Byte schon vorgesehen und trotzdem gibts einen Timeout.
Naja, 128Khz, interner Oszillator, Schätzeisen, sind schon ziemlich
extreme Anforderungen für den Bootloader.
Gruß Hagen
Hallo Hagen,
ich hab schon wieder neue Sorgen. Der Bootloader funktioniert soweit
ganz gut - aber ein Verhalten kann ich mir noch nicht erklären;
nach einem Reset (getestet power up und external reset) startet die
Applikation nicht automatisch. Statt dessen scheint der Bootloader
ständig neu durchzustarten (zumindest wenn ich den Watchdog-Support
aktiviere).
Ich kann die Applikation nur starten, wenn ich die Bootloaderverbindung
aufbaue und dann wieder beende.
Ich hab mir jetzt schon Gedanken über das BootDelay gemacht. Aber daran
scheint es nicht zu liegen. Ich bin gerade dabei immer mehr durch den
Assembler-Code durchzusteigen. Trotzdem stelle ich mir jetzt die Frage,
ob mein Problem daher kommt, daß meine RX- und TX- Leitungen mit 10 K
pulled up sind. Kann ich mir aber nicht vorstellen.
Vielleicht ist ja das Problem bekannt - dann würde ich mich mal wieder
über einen Hinweis freuen. Ich werde derweilen mal genauer hinsehen, was
hier passiert ist.
Schöne Grüße - Peter
Das Problem hatte Mark C. auch schon mal. Du musst in deiner Anwendung
den Watchdog entweder selber periodisch zurücksetzen oder ihn
deaktivieren. Falls du WinAVR GCC benutzt dann schaue dir mal das Test
Projekt im ordner \test\ an.
Im AVRootloader.ASM habe ich dazu schon Änderungen eingebaut in der
AutoBaud und BootSign Detection Funktion so das dort immer der BootDelay
Timeout berücksichtigt wird.
Versuche mal UseResetDelay=0 zu setzen. Dann wird das BootDelay als
Timeout über alles benutzt. Dh. selbst wenn der RX Pin floated oder
andersweitig "getaktet" ist wird nach BootDelay Millisekunden die
Anwendung gestartet, falls kein gültiger Connect zustande kam. Das ist
ja der Grund warum man über UseResetDelay=0/1 das Timeout Verhalten des
Bootloaders in der Baudraten/BootSign Detektion verändern kann.
Wird UseResetDelay=1 gesetzt so verlängert sich der Timeout in diesen
beiden Funktionsteilen immer auf BootDelay Millisekunden solange der RX
Pin toggelt, eg. floated.
Beides kann erwünscht sein und hat seine Nachteile je nach Hardware.
PS: nochwas, du bist ja derjeninge mit den 128KHz CPU Takt, shit.
Überprüfe mal was BootDelay für einen Wert bekommt. 128000/4 = 32000 div
2^16 = 0. BootDelay steht bei dir auf 0 und das ist doof. Defakto ist
dein MCU Takt so gering das die Timeout Schleifen im Bootloader nicht
mehr die korrekte Timeoutzeit warten. Hm, muß ich erstmal drüber
nachdenken. Versuche mal BootDelay = 6 zu setzen.
Gruß Hagen
Hallo Hagen,
ich habe natürlich daran gedacht den Watchdog-Timer in meiner
Applikation abzuschalten. Das funktioniert ja auch.
Was sich hinter dem Parameter UseResetDelay verbirgt denke ich auch
verstanden zu haben.
Ja, aber dieses BootDelay... da ist mir noch nicht so ganz klar, wie du
damit den Timeout realisierst. Ich hatte gestern mit BootDelay = XTAL
und BootDelay = XTAL/4 getestet. Heute hab ich dann mal BootDelay = 6
probiert - na das ging natürlich nicht.
Ich hab nun wie gesagt versucht aus deinem Assembler-Code schlau zu
werden. Aber bisher tue ich mich da noch schwer. Vielleicht kannst du
mal ein bisschen beschreiben, wie du den Wert von BootDelay
verarbeitest.
Ich werde dann mal ne Debug-Session starten - vielleicht geht mir dann
ein Licht auf.
Viele Grüße - Peter
In der Baudraten/BootSign Detektion wird ein 24 Bit Wert dekrementiert.
das MSB dieses Wertes ist BootDelay/6. BootDelay/6 deshalb weil ein
Dekrementationschritt samt Abfrage 6 MCU Takte benötigt. Der Bootloader
wartet auf jeden Pegelwechsel am RX Pin und dekrementiert diesen 24 Bit
Wert. Ist er runtergezählt hat der Bootloader annäherend exakt
XTAL/BootDelay Millisekunden gewartet. Wenn also in BootDelay = XTAL/4
drinnen steht dann sind dies 1 Sekunde/4 = 250ms und in BootDelay steht
die Anzahl der Takte für 250ms. Bei der Initialisierung des 24 Bit
Zählers wird nur dessen MSB mit BootDelay/6 gesetzt. /6 weil die Anzahl
der MCU Takte um den 24 Bit Wert zu dekrementieren/abzufragen/RX Pin
abfragen 6 Takte benötigt.
Die Minimale Taktfrequenz in XTAL damit dieser Zähler korrekt für 250ms
arbeitet ist 4*6*2^16=1572864 ~1.6MHz. Also 1572864/4 = 393216 / 6 =
2^16 = 0x010000 und somit ist das MSB des 24 Bit Zählers = 1. Für einen
Timeout von 1 Sekunde sind es 1*6*2^16=393kHz.
Die Timeout Schleifen sind auf Grund ihrer Konstruktion also ungeeignet
für geringe XTAL Frequenzen. Das lässt sich aber abändern:
Gruß Hagen
Kostet 1 Word mehr an Code, dafür ist der Timeout auf 6 Takte exakt und
bei deinem kleinen XTAL besser. Vorher war es nur auf 2^16 Takte exakt.
Gruß Hagen
Hier eine korregierte Version.
Das RS485 Problem vom Markus C. wurde gefixt. Nun funktioniert der
Bootloader verifiziert auch mit RS485 Bussen. Getestet habe ich mit
einen FTDI FT232R an MAX487 -> SN75LBC176 an ATMega162 bis 256kBaud.
Das Problem mit extrem geringen XTAL Werten (siehe oben 128kHz) und den
Timeout Schleifen ist ebenfalls gefixt.
Desweiteren wurden einige Watchdog Reset Aufrufe anders plaziert.
Gruß Hagen
Hallo, Hagen,
erst sage ich besten Dank für deine Arbeit! Dein Bootloader funkzioniert
perfekt.
Nur habe ich festgestellt, dass mit letzte AVRootloader.exe habe ich
mein streng schiffrierte EEPROM aus Mega32 ohne Problem gelesen! Obwohl
schreiben kann ich nicht (natürlich ich habe keine gültige Password
angegeben).
Device Information---------------
Connection : 2-Wire
Device name : ATmega32, ATmega32A
Device signature : 1E9502
SRAM size : 2048 Byte
EEPROM size : 1024 Byte
FLASH size : 32768 Byte
FLASH size for application : 31744 Byte
FLASH pagesize : 128 Byte
Bootloader size : 1024 Byte
Buffersize for data : 1944 Byte
SRAM start address : 96
Bootloader version : 2
Use bootsection : Yes
Versioning supported : No
Cryptography supported : Yes
FLASH data must be encrypted : Yes
EEPROM data must be encrypted : Yes
Protocol------------------------
12.03.09-13:19:19-258 > Connecting on port COM1...
12.03.09-13:19:19-628 > Connecting on port COM4...
12.03.09-13:19:19-929 > Error: no Device found
12.03.09-13:19:26-757 > Connecting on port COM1...
12.03.09-13:19:27-137 > Connecting on port COM4...
12.03.09-13:19:27-307 > Device connected
12.03.09-13:20:00-736 > Reading EEPROM...
12.03.09-13:23:50-751 > Writing EEPROM...
12.03.09-13:23:50-811 > Cmd.SetBuffer.ResCheck(2) Error: Decryption
failed
12.03.09-13:24:13-835 > Reading EEPROM...
Also Reading geht anwandfrei ;-)
Habe Ahnung, dass genau so leicht kann man Flash einlesen.
mfg
Vladimir
Ja das ist richtig und auch Absicht so. Übrigens ist dieses Verhalten
seit Anbeginn im Bootloader so.
Einen kryptographischen Schutz beim Auslesen von Speichern die man per
Konfiguration auslesbar gemacht hat gibt es nicht.
Möchte man das Auslesen der Speicher verhindern so muß per Konfiguration
einfach diese Lesefunktion deaktiviert werden. Der beste
kryptographische Schutz ist es immer noch eine potentiell angreifbare
Funktion erst garnicht zu unterstützen, wo nichts ist kann nichts
geknackt werden.
Der FLASH kann gernerell nur geschrieben werden, ein Auslesen ist als
Funktion nicht vorhanden.
Das ist ua. der Grund für eine separate Verify-Funktion für den FLASH.
Mit dieser kann man ohne eine Lesefunktion zu haben denoch den Inhalt
des FLASHs überprüfen. Kryptographisch gesehen bedeutet dies das nur
Derjenige der das korrekte FLASH File extern besitzt auch die
Möglichkeit hat den aktuellen Inhalt des FALSHs zu überprüfen. Benutzt
man verschlüsselte ACY Dateien ist auch dieses Verify kryptograpisch
sicher für den Herausgeber dieser ACY. Ein Verify mit aktivierter
Verschlüsselung akzeptiert nur verschlüsselte Daten. Wenn also
UseCryptFLASH=1 ist kann nur mit verschlüsselten ACY Dateien ein Verify
gemacht werden.
Ein Auslesen des FLASHs ist im Bootloader nicht vorhanden auch nicht als
Backdoor oder so, egal ob mit oder ohne aktivierter Verschlüsselung.
Möglich wäre es schon das man den Bootloader so umschreibt das man Daten
nur lesen kann wenn vorher eine korrekte Authentifizierung übermittelt
wurde. Dies wäre sogar relativ einfach möglich.
Aber welchen Sinn würde das machen ?
Möchte man das Auslesen des EEPROMs seinen Kunden nicht gestatten dann
wird einfach UseE2Read=0 gesetzt und schon ist diese komplette Funktion
garnicht mehr im Bootloader vorhanden. Nichts Vorhandenes kann nicht
geknackt werden.
Eine Ausnahme ist UseSRAM=1. Diese dient zum "Mini-Debuggen" der
Anwendung. Mit ihr kann man zb. den aktuellen Inhalt des SRAMs, Register
und IO Ports auslesen und auch schreiben. Möchte man sichere
Kryptographie so muß UseSRAM=0 gesetzt werden.
Fazit: bei korrekter Konfiguration sehe ich keinen anderen Weg als den
AVR mit echt fetten Geschützen knacken zu müssen, also mit Reverse
Engineering auf Chip Ebene. Das Bootloader Protokoll und die
unterstützten Funktionen des Bootloader im Zusammenhang mit der
Arbeitsweise der verschlüsselten ACY Dateien, der verwendeten
Verschlüsselung und ihrer kryptographischen Komplexität und benutzten
Passwortlänge, ist aus meiner Sicht kryptographisch wasserdicht und
nicht knackbar mit praktisch vorhandenem Equipment, heutigem Wissenstand
und in praktikabler Zeit.
Aus meiner Sicht ist im Rahmen des Möglichen das kryptograpisch maximal
Machbare gemacht worden.
Bei mathematisch betrachtetem infinitimalem Aufwand ist jede
Verschlüsselung in unendlich kurzer Zeit knackbar.
>Habe Ahnung, dass genau so leicht kann man Flash einlesen.
Diese Vermutung kann ich also klar verneinen, es gibt keine Funktion zum
Lesen des FLASHs.
Gruß Hagen
Selbst solche erweitereten Angriffe wie den Strombedarf des AVRs und
damit der Bootloader Software zu überwachen dürften enormst schwierig
sein. Alle kryptographischen Operationen die zb. den Schlüssel aus dem
FALSH lesen oder ihn später dann im Algorithmus weiterverarbeiten sind
gleich gewichtet im Strombedarf. Dh. an Hand des Strombedarfes ist auf
Grund der symmmetrischen Operationen im XTEA Algorithmus kein Rückschluß
auf den verwendeten Schlüsselinhalt herzustellen. Diese Annahme von mir
ist aber mit Vorsicht zu genießen da ich nicht sicherstellen kann wie
Atmel seine Chips intern konstruiert hat. Es wäre aber schon sehr
fragwürdig das ein Opcode wie xor r1, r2 abhängig vom Inhalt in r1
und/odr r2 unterschiedlich Strombedarf bedeuten würde.
Gruß Hagen
Bei der Konfiguration
UseCrypt=1
UseCryptE2=1
UseE2Write=1
UseE2Read=1
kann man also
1.) nur verschlüsselte Daten in das EEPROM schreiben, nur der
Herausgeber des Modules ist also in der Lange den EEPROM zu schreiben
2.) alle Daten im EEPROM lesen, also auch die Endkunden können den
EEPROM lesen.
Dies dient auch einem ganz speziellem Zweck. Man kann auf sichere Art
die Veränderung der Konfigurationen im EEPROM updaten, der Kunde kann
sie sich auslesen aber eben nicht verändern. Damit dient diese
Funkionalität quasi als indirekte Kommunikationsschnittstelle zwischen
Herausgeber und Kunde.
Über diese Konfiguration hat man also einen kryptographsichen Writeonly
Schutz.
Soll der Kunde diese Daten nicht lesen können dann muß UseE2Read=0
konfiguriert werden. Das sichere Auslesen dieser Daten muß dann vom
Herausgeber über seine eigene Anwendung programmiert werden. Dies ist
dann auch flexibler durchführbar, zb. nur bestimmte Sektionen des
EEPROMs sind auslesbar für den Kunden.
Gruß Hagen
Hallo Hagen,
habe folgendes Problem, Tiny24, 1-wire, nur WDR und UartInvert ein.
Flashen geht, meine App. läuft auch, aber nur wenn der Bootloader
Connect wurde. Wenn der Loader ohne Connect verlassen wird, (wird er
auch und WDR wird auch abgeschaltet) hängt mein App. sich auf.
Es sieht so aus, als wenn er keine Interrups mehr ausführt, als wenn
noch ein Flag an ist. Bevor ich alles zerrlege, hast Dueine Idee?
Gruß Willi
Das Problem gab es hier schon mehrmals. Du brauchst extern einen
Pullup/Pulldown widerstand, wenn du den Programmierstecker nicht die
ganze Zeit am Pin anliegen hast. Für UartInvert=1 brauchst du einen
Pullup für UartInvert=0 einen Pulldown. Oder du passt diese neue
BootDelay-Funktion an.
Hoffe ich hab es richtig rum im Gedächtnis gehabt.
Bei UartInvert=1 und 1-Wire benötigst du einen externen Pullup. Ist im
Schematik auch zu sehen. Setze auch noch UseResetDelay=0.
Ansonsten ist es schwierig zu beurteilen wo das Problem liegt. Ich
könnte auf deinen Source mal einen Blick werfen, vielleicht liegts nur
an einem kitzekleinem Detail. Schicke ihn mir bitte per PN.
Ich habe nämlich gerade am Connect-Timeout usw. in den letzten Versionen
stark gearbeitet, da sollte es keinerlei Probleme mehr mit geben.
Übliche Verdächtige:
- Brownout nicht aktiviert
- VCC schlecht
- WDT nicht ordentlich deaktiviert oder benutzt
- SEI Aufruf vergessen
- ISRs nicht korrekt (Register sichern, wiederherstellen)
- extrem geringe Taktfrequenz
Gruß Hagen
Guten Morgen,
Hallo Mark, Hallo Hagen,
ich habe nicht das Problem mit dem PullUp bei UartInv=1 (PullUp ist
vorhanden). Der Bootloader wird ja auch nach 0,3 sek verlassen (hab
extra einen Pin in meiner App. gesetzt) dann sieht es so aus, als wenn
kein Interrups mehr ausgeführt werden. Mein Code ist folgender:
[[http://www.mikrocontroller.net/attachment/47695/DCC_Lockdecoder.zip]]
die Version
mit Tiny24 ohne Programierung.inc (ist sonst zu groß). Komisch ist nur,
das wenn der Bootloder 1x Connect und gleich wieder verlassen wird,
läuft meine App.. War gestern schon sehr spät, muß ich heute Abend
schaun, wo er hängen bleibt.
Bei dieser Gelegenheit gleich noch eine Frage: ich will den Loader für
meinen DCC Lokdecoder benutzen, hier kann er aber nur explizit aus
meiner Software aufgerufen werden ( weil der Lokdecoder ja ständig
keinen Kontakt zur Schiene hat und somit immer wieder einen PowerOnReset
bzw BrownOutReset macht) und da sind 0,3 sec Verzögerung nicht drinn.
Das würde ja mit Deinem Loader und Mode 4 "nur aus App starten" kein
Problem sein. Dann muß ich aber das erste mal meine App. und den Loader
in einem HEX zusammenfassen und in den Flash schreiben, sonst hab ich
ein "Henne-Ei" Problem. Hast Du hier noch einen Tip für mich?
Gruß Willi
>in einem HEX zusammenfassen und in den Flash schreiben, sonst hab ich>ein "Henne-Ei" Problem. Hast Du hier noch einen Tip für mich?
Nein hast du nicht das habe ich schon berücksichtigt ;)
Also du hast nur den Bootloader das erste mal geflasht. Alle Bytes im
FLASH vor dem Bootloader sind somit 0xFF. Der Bootloader reagiert nur
wenn in MCUCSR = 0x00 drinnen steht. Der Bootloader benutzt UseWDT=1.
Der AVR wird eingeschaltet und MCUCSR <> 0. Bootloader initialsiert WDT
und dabei wird MCUCSR = 0 gesetzt. Bootloader möchte Anwendung aufrufen
springt aber an eine Stelle im FLASH die mit 0xFF gefüllt ist,
genaugenommen springt er bei ATTinys an BootStart -2 und dort steht
0xFFFF statt einem RJMP MainApp. 0xFF ist so wie der NOP Code, ergo
läuft die MCU wieder in den Bootloader Code rein. Da nun aber MCUCSR = 0
ist bedeutet dies das der Bootloader aus der "Anwendung" heraus
aufgerufen wurde.
Ergo: im Bootmode=4 und UseWDT=1 wird der Bootloader auch aufgerufen
wenn keine Anwendung im FLASH installiert wurde. Und zwar beim zweiten
Aufruf des Bootoaders nach einem RESET, PowerUp, Brownout, WDT Reset.
Denoch erachte ich diese BootMode=4 als "gefährlich". Warum nicht auf
den WatchDog triggern ? Ist viel eleganter.
Denn wenn BootMode=4 und UseWDT=0 ist dann wird der Bootloader
tatsächlich nur durch eine Anwednung aufrufbar sein, es sei denn man
ändert AVRootloader.asm so ab das das MCUCSR Register gelöscht wird.
Benutzt du aber den WDT mit UseWDT=1 und BootMode=3 ist das wesentlich
cleverer. Du hast erstens ein wesentlich stabileres Verhalten des
Bootloader und deiner Anwednung auf unvorhersehbare Ereignisse. Zweitens
kannst du den Botloader per RJMP oder per WDT Timeout starten. Startest
du per WDT Timeout wird ein "echter" RESET des AVRs gemacht und somit
sind alle Register/Ports etcpp. immer korrekt initialisiert. Das könnte
auch dein Problem im aktuellen Projekt sein. Du rufst den Bootloader per
RJMP auf hast aber vorher schon bestimmte Einstellungen wie Timer etcpp.
getroffen. In deiner Main() deiner Anwednung verlässt du dich nun darauf
das alle Register und Ports wie nach einem RESET initialisiert wurden,
und initialsiierst sie demzufolge nicht explizit neu. Der Bootloader
kehrt selber per RJMP zu Main() zurück und somit übernimmmt dein Code
eine teilweise initialisierte Hardware vom vorherigen Aufruf der Main()
weil du den Bootlaoder per RJMP aufgerufen hast.
Ich empfehle immer den WDT zu benutzen, sowohl im Bootloader per
UseWDT=1 wie auch in der Anwendung beim Aufrufen des Bootloaders. In
deiner Anwednung elber kannst du den WDT ja deaktivieren, musst du sogar
wenn du ihn nicht für deine App benutzen möchtest.
Gruß Hagen
Vergessen: drittens könnte es theroretisch zu dem Fall kommen das der
Bootloader beim Programmieren einer neuen Anwendung Scheiße baut. Diese
halb geflashte Anwendung könnte somit später aufgerufen werden. Sie
läuft dann ab einem gewissen Punkt in den unprogrammierten FLASH rein
und somit am Ende in den Bootloader. Bei BootMode=4 und UseDT=0 und ohne
Zurücksetzen des MCUCSR Registers würde der AVR quasi tot geflasht sein.
Mit UseWDT=1 aber würde eine "fehlerhafte" Anwendung quasi nicht
reagieren und der durch den Bootloader programmierte Watchdog würde
spätestens nach 2 Sekunden einen RESET erzwingen der schlußendlich den
Bootloader aufruft. AVR nicht tot geflasht und der Bootloader
interagiert für die Anwednung als Failsave ;)
Gruß Hagen
Ich habe mal kurz den DCC Source angeschaut. Variable BitZaehler und
einige andere werden in Main nicht initialisiert. Diese Variablen werden
in den ISR mit Daten gefüllt aus denen später das DCC Kommando dekodiert
wird. Sind sie aber nicht initialisiert und mit Daten des vorherigen
Runs der Applikation gefüllt funktioniert der Code nicht mehr sauber.
Dh. der Code erwartet im Grunde das er aus einem RESET mit definierten
Startbedingungen heraus aufgerufen wird. Wurde der Bootloader aber per
RJMP aufgerufen so springt dieser selber per RJMP Main wieder in die
Anwendung. Der Bootloader sleber läuft korrekt da er jede Hardware die
er für sich benötigt initialisiert und ansonsten ohne ISRs oder andere
HW lauffähig ist. Das gilt dann aber nicht mehr für den DCC Dekoder.
Würdest du den Bootloader per WDT Timeout starten so wird ein RESET des
AVRs ausgelösst und dann der Bootloader gestartet. Dieser wiederum ruft
dann per RJMP Main den DCC Dekoder auf und dieser hat einen vollständig
neu initialsierten AVR vor sich.
Ändert aber nichts an der Sache das du die uninitialiserten Variablen
des DCC dekoders trotzdem im Main() korrekt initialisieren musst. Denn
diese vaiablen liegen in Register oder dem SRAM der ja durch den
Bootloader Code ebenfalls modifiziert wird.
Gruß Hagen
Hallo Hagen,
ich habe leider ein Probelm mit deinem Bootloader. Ich verwende einen
AtMega16 und einen FTDI 232 BM und kann keine Verbindung aufbauen um die
Software einzuspielen.
Das angepasste AssemblerFile ist im Anhang.
Der letzte Versuch war auch schon mit 9600 Baud fix eingestellt und
brachte auch keinen Erfolg.
Danke vielmals
Michael
Hallo Hagen,
ersteinmal Danke für die vielen und vor allem schnellen Tips!
Das mit meiner nicht initialisierten Variablen überprüf ich gleich
einmal, momentan hab ich den Bootloader aber noch mit WDT getestet! Die
Geschichte wie das in dem fertigen Projekt aussehen kann, darüber habe
ich mir bis jetzt nur ein paar Gedanken gemacht, aber nach Deinen
Erläuterungen, denke ich, das ich es dann über den WDT mache, ich würde
den dann in Abhängigkeit einer Variablen ein/ausschalten und somit die
Programmierfunktion im normalen Betrieb deaktivieren, das mit dem
durchlaufen des leeren Flash ist natürlich richtig daran habe ich nicht
gedacht.
Gruß willi
Ich nocheinmal,
die Variabelen werden alle Initialisiert, Bitzaehler wird vor jedem
gebrauch in der DCC Schleife gelöscht, ich habe die Variablen, welche eh
immer wieder vor gebrauch erst neu gesetzt werden im main nicht
nocheinmal gesetzt.
Aber schauen wir mal, das findet sich schon.
willi
@Michael:
>ich habe leider ein Probelm mit deinem Bootloader. Ich verwende einen>AtMega16 und einen FTDI 232 BM und kann keine Verbindung aufbauen um die>Software einzuspielen.>Das angepasste AssemblerFile ist im Anhang.
Welcher Anhang ?
Hast du UseUartInvert=1 gesetzt, wie im ASM gefordert wenn man einen
Pegelwandler wie den MAX oder FTDI benutzt ?
Gruß Hagen
Oh, sorry, hab ich vergessen, denn Anhang mit hochzuladen... Aber
jetzt...
Ja habe ich, bei meinem letzten Versuch habe ich die automatische
Baudrate deaktiviert und eine fixe Baudrate von 9600 eingestellt, hat
aber leider auch nicht funktioniert.
Danke
@Michael:
ich fasse also mal zusammen:
- ATMega16
- 8 Mhz Takt, entsprechend Fuses gesetzt, zb. CHKDIV8 ist nicht gesetzt
- FTDI Pegelwandler
- RX,TX liegt auf PORTD an PD0/PD1 und wurde am FTDI korrekt verbunden
- UseAutoBaud=1 wieder setzen, das korregiert evntl. Fehler beim XTAL
etcpp.
- UseSRAM=1 ist im Zusammenhang mit UseCrypt=1, UseCryptFLASH=1 ein
Sicherheitsrisiko, spielt zwar nichts zur Sache aber denoch wichtig zu
bemerken
- BOOTRST Fuse wurde gesetzt
- Boot Section Fuses wurde auf 1024 Bytes = 512 Words gesetzt
- in AVRootloader.exe auf dem PC wurde "BOOTLOADER" als BootSign
augewählt
- in AVRootloader.ini [Timeouts] Options =1 setzen und schauen was im
Protokollfenster als "received:" angezeigt wird. Den Inhalt des
Protokollfensters hier posten, nachdem du den Connect Button gedrückt
hast.
- auf dem PC wurde alles soweit vorbereitet das über den virtuellen COM
Port der FTDI erreichbar ist, eventl. noch mal testen ob das alles geht.
Dazu am FTDI den RX-TX Pin brücken und per PC-Software einen Connect
versuchen, sollte dann 1-Wire Modus erkennen und das empfangen was
gesendet wurde.
Falls du ein Oszi hast wird es Zeit es zu befeuern und mal zu schauen
was am RX Pin des AVRs ankommt.
Gruß Hagen
Hallo Hagen,
so, Fehler gefunden, lag bei mir. Mein Code+Bootloader war zu groß für
den Tiny24 und beim zusammenkürzen war dann doch ein Register nicht mehr
ordentlich initialisiert.
Habe jetzt folgenden Stand: Bootloader mit UseBootMode = 3, UseWDR = 1,
UseUartInvert = 1, RX=TX Port, feste Bautrate im AVR. App. läßt sich
problemlos laden und läuft auch. Aber der Bootloader wird immer
aufgerufen (bei Mode=3 sollte das aber nur nach einem WDT Reset
geschehen), wenn kein "Connect" wartet er "BootDelay" ab und startet
dann meine App.. Das sollte er eigentlich nicht. Er sollte nur gestartet
werden, wenn ich in meiner App. einen WDT Reset erzeuge (so wie Du oben
gezeigt hast). Nocheinmal zusammengefasst, momemtan schalte ich den WDT
sofort in meiner App. aus, das bedeutet, Der Loader solte eigentlich nur
beim leeren Flash aufgerufen werden, sobald meine App. im Flash ist gibt
es keinen WDT Reset mehr und somit sollte der Bootloader bei Mode = 3
immer sofort übersprungen werden, macht er aber nicht, er wartet immer
"BootDelay" ab und startet erst dann meine App..
Hast Du hier noch ein Tip für mich?
Gruß Willi
Habs gerade nochmal getestet und bei mir funktioniert das einwandfrei,
ATMega162.
Erklärung könnte sein das deine Anwendung irgendwie in den Bootloader
reinläuft.
Kannst du mal eine Minimal Anwendung bauen in der eine LED an einem Pin
ausgeschaltet wird. Im AVRootloader.asm lässt du diese LED dann leuchten
und zwar nach der Abfrage des UseBootMode und vor der Initialisierung
der Ports.
Wenn jetzt der Bootloader durchstartet beginnt diese LED zu leuchten.
Ohne die Minimal-App leuchtet sie also dauerhaft. Sobald die App
geflasht wurde leuchtet die LED nicht mehr. Die App sollte einen Pin
abfragen der extern auf LOW gezogen wird wenn der Bootloader gestartet
werden soll. Sie benutzt dann den WDT um den Boootloader zu starten. Du
kannst jetzt einen externen RESET, PowerUp usw. machen die LED darf
nicht leuchten. Erst wenn der Pin auf Low gezogen wird sollte sie für
BootDelay Millisekunden leuchten.
Gruß Hagen
Hallo Hagen,
danke für deine Antwort, ich habe die Einstellungen getroffen, leider
hilft dies nicht.
Ja ich habe schon mit dem Oszi gemessen, am RX Pin liegen die Pakete an,
jedoch sendet der uC nichts zurück. Die Kommunikation funktioniert
zwischen Pc und uC mit der "richtigen" Software, nur leider kann ich
keine Verbindung für ein Bootloaderupdate aufbauen.
Reicht es eigentlich nur den Bootloader in den AtMega zu laden und
anschließend das "richtige" Hex File mittels deinem Programm zu laden.
Oder muss von Beginn an das "richtige" Hex File mit kompiliert werden?
Danke schonmal für deine Antwort.
Michael
Hallo Michael
> Die Kommunikation funktioniert> zwischen Pc und uC mit der "richtigen" Software, nur leider kann ich> keine Verbindung für ein Bootloaderupdate aufbauen.
Wenn das funktioniert muß es auch mit Bootloader gehen. Ist also ein
Fehler in den Einstellungen. Mach mal folgendes:(wie Hagen oben schon
gesagt hat)
- in AVRootloader.ini [Timeouts] Options =1 setzen und schauen was im
Protokollfenster als "received:" angezeigt wird. Den Inhalt des
Protokollfensters hier posten, nachdem du den Connect Button gedrückt
hast.
> Reicht es eigentlich nur den Bootloader in den AtMega zu laden und> anschließend das "richtige" Hex File mittels deinem Programm zu laden.
Ja !
> Oder muss von Beginn an das "richtige" Hex File mit kompiliert werden?
Auf keinen Fall !
Gruß Stefan
Hallo Hagen,
Hallo Stefan,
ich habe die ini- Datei geändert und das Protokoll gespeichert befindet
sich im Anhang, bei diesem Versuch habe ich das asm- File mit euren
Tipps aktualisiert.
Welche Einstellung kann ich mit "UseBootVector" treffen?
Danke im Voraus
Michael
UseBootVector=1 speichert ganz am Ende des FLASH einen Sprung zu
BootStart. Da diese Address fix ist ist es nun ein leichtes einen
universellen Aufruf des Bootloaders aus der Applikation durchzuführen.
Wenn du den Bootloader aus deiner Anwendung heraus aufrufen möchtest
dann kannst du dies über einen Sprung über diesen Vektor oder per
Watchdog Timeout. Ich empfehle per WDT.
Schau dir das Test-Projekt im Ordner \test\ an, das sollte eigentlich
alles demonstrieren.
RESET per Pullup nach VCC und Taster an GND, ist schon richtig wie du
das machst.
Zurück zum eigentlichen Problem. Gehe mit dem Oszi an den TX Pin des
AVRs und schaue ob der AVR sendet. Oder setze UseRS485=1 und definiere
einen freien Pin bei DE_PORT und DE_PIN. Dieser Pin geht High wenn der
Bootloader sendet und Low wenn er empfängt. Falls du schon eine LED auf
deinem Board hast dann benutze deren Pin & Port für DE_PIN & DE_PORT. Du
solltest dann ein Blinken sehen wenn der AVR sendet, geringe Baudrate
dann aber einstellen.
Ich denke du hast irgendwas nicht korrekt konfiguriert oder mit deiner
HW stimmt was nicht.
An und für sich ist es eigentlich ganz simpel den Bootloader zum Laufen
zu bekommen. Ich weiß nicht wie einfacher ich noch alles bauen soll ;)
Wie hast du den AVR angeschlossen ? Erkläre mal deine Hardware.
Achso: in deinem Protokoll antwortet der AVR nicht. Trenne deinen FTDI
vom AVR und verbinde dessen RX-TX Leitung per Brücke. Versuche dann
erneut einen Connect über die PC-Software und sage mir was du im
Protokollfenster siehst.
Gruß Hagen
Hallo Hagen,
ich habe Rx und Tx miteinander verbunden und das Protokoll in den Anhang
gehängt.
Die Hardware funktioniert bestimmt, den Fehler können wir ausschließen,
denn der uC redet aktuell mit Matlab und bekommt davon wieder Befehle
zurück.
Danke
Michael
Juhu, es klappt, frag mich nicht wieso?
Ich debugge und gebe einen externen Reset und drücke anschließend im
Debugger Start ist die Verbindung da.
Werde es noch mal analysieren und dir dann bescheid geben.
Danke vielmals für deine Bemühungen und für diesen spitzen Bootloader
Michael
Hallo Hagen,
habe mein Problem mit dem Start des Bootloaders gefunden, der Loader
startet in Mode 3 auch bei einem Brown_Out_Reset. Kannst es ja Bitte
einmal überprüfen, ich habe folgenden Code in den T24 geladen:
Main:
MCUSR_ausgeben:
ldi w,0b11111111
out DDRA,w
pop w ; MCUSR holen (im Loader
gesichert)
rol w ; LEDs sind an A1 bis A5
(nichtA0-)
out PORTA,w
WDT_off: ; WDR ausschalten
(nachBootloader9
WDR
; Clear WDRF in MCUSR
; ldi w, (0<<WDRF)
; out MCUSR, w
; Write logical one to WDCE and
WDE
; Keep old prescaler setting to
prevent unintentional Watchdog Reset
; in w, WDTCSR
; ori w, (1<<WDCE)|(1<<WDE)
; out WDTCSR, w
; Turn off WDT
; ldi w, (0<<WDE)
; out WDTCSR, w
port_tog:
cbi Porta,5
nop
nop
sbi Porta,5
rjmp PC-4
LED 1-4 zeigen dann den MCU Status an. LED 5 toggelt wenn er fertig ist.
Folgendes verhalten:
1. ext Reset erzeugt -> Loader wird sofort verlassen, ist richtig
2. Brown_OUT_Reset -> Loader wird angesprungen, ist falsch
3. WDR_Reset erzeugt -> Loader wird angesprungen, ist Richtig
Danke Willi
Da es einige AVRs gibt die noch andere Reset Quellen haben als obige,
zb. USB-AVRs haben noch USBRF oder es gibt noch den JTAG-Reset JTRF oder
OCDRF = Onchip Debug Reset.
Allerdings baut die letzte Methode darauf das undefinierte Bits im
MCUCSR auf 0 stehen.
Gruß Hagen
Ich habe das einmal so abgeändert, kannst ja einmal schauen, ob das mit
dem rest von Deinem Code passt:
.if UseBootMode != 0
andi paral, (1 << WDRF) | (1 << BORF) | (1 << EXTRF) | (1 << PORF)
breq bm1
.ifdef BootModeFlag
sbrs paral,BootModeFlag
.endif
Jetzt wird Brown_OUT nur noch bei Mode 0 mit berücksichtigt. Mein Mode 3
läuft so auch.
Willi
welches Letzte ? Hast du mal das neue ZIP getestet ? Sollte eigentlich
funktionieren, es sei denn es ist tatsächlich so das undefiniert Bits im
MCUCSR auf 1 stehen.
Gruß Hagen
Ja das meine ich, es reicht schon das wie vorgeschlagen zu ersetzen:
"ändere es so ab:.if UseBootMode
.ifdef BootModeFlag
sbrc paral, BootModeFlag
.endif
cpse paral, zerol
jmpapp
.endif ; .if UseBootMode"
Eigentlich sind nur die Vier Bits wie oben im MCUSR vorhanden, aber wer
weiß was die nicht benutzten so machen. Das mit dem BORF geht doch auch.
Guten Morgen Willi
> Guten Morgen Willi
jo man sollte am Sonntag Abend nicht an 4 Projekten gleichzeitig basteln
(Fernsehen im Hintergrund, Unterhaltung mit Freundin, Arbeit am
Bootloader und meine DSSS Simulation). Habs wieder geändert auf deine
Version, hat den Vorteil das es Bulletproof ist und wenn man auf den
Spezial-AVRs deren Resetquellen benutzen möchte ist die Änderung im
Source trivial. Dachte halt im Übereifer das man noch par Bytes Code
einsparen könnte, falsch gedacht.
Gruß Hagen
>Eigentlich sind nur die Vier Bits wie oben im MCUSR vorhanden, aber wer>weiß was die nicht benutzten so machen. Das mit dem BORF geht doch auch.
Atmel ;) Aber der Source im letzten ZIP maskiert nur die bekannten Bits
aus, alle unbekanten werden auf 0 ausmaskiert. Somit ist das jetzt
sauber, aber das mit dem tst paral denke ich hätte auch funktioniert.
Der Unterschied ist eben das mit dem andi paral, (1 << WDRF) | (1 <<
EXTRF) | (1 << PORF) | (1 << BORF) wirklich nur auf diese Resetquellen
getriggert wird. Dh. im Klartext, lösst auf einem USB-AVR der USB Reset
aus so wird der Bootloader durch einen solchen Reset gestartet u.u.A.
einem direkten RJMP. Bei der Methode mit tst paral wird der Bootloader
aber durch einen USB-Reset nicht gestartet. Möchte man dieses Verhalten
erreichen so muß jetzt der Source manuell geändert werden und in die
andi Maskierung noch (1 << USBRF) hinzugefügt werden, gleiches gilt für
JTRF und OCDRF, die auch noch überschneidend definiert sind.
Andererseits gibts im MCUCSR noch ungenutzte Bits und die könnten da sie
undefiniert sind auch auf 1 stehen. Ohne Ausmaskierung dieser Bits würde
der Code dann auch nicht mehr das machen was er sollte.
Lange Rede kurzer Sinn: solche Fragen, nach der universellsten Lösung,
beschäftigen einen Programierer der ein Projekt pflegt das auf möglichst
allen AVRs laufen soll.
Gruß Hagen
Hi Hagen,
erstmal danke für die saubere Arbeit!
Habe festgestellt, dass die Implementierung des Bootloaders per ISP mit
dem neuen AVR-Studio (4.16) nicht mehr funktioniert (mega644P).
Ist dir das auch schon aufgefallen?
Mit 4.15 (letzte Version) gibt's keine Probleme.
[OT]
Übrigens scheint's den mega644 bei Reichelt nicht mehr zu geben, habe
unter dessen Bestellnummer den mega644P geliefert bekommen.
[/OT]
Version 6.0
Das von Thilo angesprochene Problem ist ein Fehler im neusten AVRStudio
4.16. Alle ASM Files die nicht bei .org 0 anfangen werden durch die
Programmiersoftware des AVRStudio nicht korrekt aus dem HEX File
ausgelesen. Soweit meine Vermutung zu diesem Problem.
In der AVRootloader aus dem Attachment habe ich mit einem kleinen Fix
dieses Problem behoben (AVRootloader.inc). Es werden einfach zwei Bytes
0xFF an Addresse 0 des FLASHs geschrieben. Beruhigend zu wissen das
nicht nur mir solche dämlichen Fehler unterlaufen ;)
Dies ist aber nicht der Grund gleich eine komplett neue Version zu
bauen. Es wurden einige Umbauten am Source getätigt mit Sicht auf den
XMega.
Das Problem mit dem UseBootMode und den verschienden Reset Sourcen der
unterschiedlichen AVRs wurde vollständig gelösst. Neu ist das man mit
UseBootMode=4 nun auch auf einen USB Reset bei USB AVRs triggern kann.
Zu beachten ist aber das einige dieser AVRs und deren Includes in \AVR
Assembler2\ nicht vollständig, eg. korrrekt definiert sind. Ein weiterer
Fehler im neuen AVR Studio den ich entdecken durfte.
Falls also beim Kompilieren von AVRootloader.asm für USB AVRs eine
Meldung kommt das USBRF nicht definiert wäre so sollte man erstmal das
entsprechende Include von Atmel mit dessen Datenblättern vergleichen und
eventuell das Flag USBRF von Hand deklarieren.
Desweiteren wurde natürlich die AVRootloader.dev Datei und das ASM um
alle neu im AVRStudio 4.16 hinzugekommenen AVRs aktualisiert.
Die Reihenfolge der einzelnen Codebestandteile des Bootloader wurde
geändert. Der eigentiche Bootloader Code beginnt bei BootStart und endet
nach BootKey.
Die kompletten Funktionen aus Special.inc samt der RJMP Vektortabelle
bei FLASHEND wurde an das Ende des FLASHs verschoben. Neu zu diesen
Funktionen ist die Funktion "dospm" verschoben wurden.
Dies alles dient zur Vorbereitung der Möglichkeit den Bootloader selber
updaten zu können. Im Minimalfall setzt man UseSpecialBootVect=1. In
diesem Moment wird in den letzten 16 Bytes des FLASHs die dospm Funktion
und eine 2 Entry Sprungtabelle kompiliert. Über die so eingebaute
"dospm" Funktion kann die Anwendung den SPM Opcode ausführen und über
diesen den Bootloader selber updaten. Natürlich müssen die Lockbits
entsprechend so gesetzt sein das die Bootsection per SPM geschrieben
werden darf.
Bei dieser Konfiguraton verbraucht man den geringsten FLASH und hat
denoch alle Möglichkeiten offen.
Oder man bindet die komfortableren Funktionen writeflash und readflash
mit ein. Sollte per Fuses das Lesen der Bootloader Section per LPM
deaktiviert worden sein so muß readflash sowieso mit eingelinkt werden.
Dazu UseSpecialRead=1 setzen. Mit der Funktion write_flash(),
UseSpecialWrite=1 und UseSpecialWriteBoot=1 hat man eine wesentlch
komfortablere Methode um den FLASH zu schreiben. Einfach x Bytes im SRAM
puffern und per write_flash() an die Zieladdresse schreiben lassen.
Diese Funktion kümmert sich dann autom. um das Page Aligment/Boundary,
IRQs und EEPROM Writes usw.
Geht man über die einfachere "dospm" Funktion muß man sich natürlich um
alles selber kümmern, spart aber bischen was an FLASH. Auf ATTinys ist
das alles natürlich unnötig da dort der SPM immer ausführbar ist
(SELFPRG Fuse).
Gruß Hagen
Hallo Hagen,
wirklich toller Bootloader den du programmiert hast.
Mir ist dennoch eine Kleinigkeit im Windows-Programm, zum Flashen der
Firmware, aufgefallen. Sobald man im EEPROM-Editor die Zeichen etwas
schneller tippt, scheint dieses einzufrieren. Dann lassen sich keine
Zeichen mehr bearbeitet.
Abhilfe schafft dann, die Verbindung zum Gerät zu unterbrechen und
anschließend wieder aufzubauen. Danach ist das EEPROM-Editor-Fenster
wieder bedienbar.
Weiterhin noch viel Erfolg mit dem großartigen Projekt "Bootloader"
Micha
@Micha,
konnte dein Problem nicht reproduzieren. Ich vermute du hast 1. die
Baudrate sehr gering eingestellt und 2. in AVRootloader.ini [Timeouts]
KeepAlive sehr klein eingestellt. Der Wert in KeepAlive sollte zwischen
250 bis 1000 ms betragen. Er bedeutet das alle KeepAlive Millisekunden
die Software im Hintergrund ein Packet an den AVR sendet. Wenn man also
verbunden ist entsteht so eine periodische Hintergrund Aktivität die je
nach Baudrate schnell oder langsam abgearbeitet wird. Falls du in deinem
AVR Bootloader UseWDT=0 gesetzt hast dann kannst du KeepAlive auch
weitaus höher setzen. Sollte UseWDT=1 sein so sollte KeepAlive nicht
1000 ms überscheiten da ja der WDT im AVR spätestens all 2 Sekunden
zurückgesetzt werden muß.
Gruß Hagen
@Hagen
Danke für deine Tests und die ausführliche Antwort. Ich betreibe den
Bootloader tatsächlich mit einer sehr geringen Baudrate von 1200Baud/s.
Der KeepAlive Timeout steht bei 250ms. Ich werde morgen probieren ob
eine Erhöhung des Timeout eine Verbesserung mit sich bringt. Den
Watchdog hab ich im Code manuell auf 4 Sekunden erhöht, damit dürfte ich
noch genug Luft für den KeepAlive Timeout haben.
MfG
Micha
Hallo Hagen
Versuch gerade deinen Bootloader auf einem mega32m1 mit externen clock
von 14,758 Mhz zu bekommen.
Der Chip meldet sich einfach nicht.
Habe das ganze auf einem mega16 mit internen clock von 8 Mhz probiert.
Da läuft alles wunderbar.
Das Programm kann ich für beide avr compilieren. keine Fehler.
Kannst du mir bitte weiterhelfen.
Vielen Dank im Voraus.
@Alex:
> Kannst du mir bitte weiterhelfen.
Und wie ?
Übliche Verdächtige:
1.) BootCodeSize nicht gesetzt, also erstmal auf 0 setzen, neu
kompilieren und das was im Messagewindow bei cseg [used] im AVRStudio
steht nach BootCodeSize schreiben, neu kompilieren und nicht stören
daran das in der neusten Version nun bei cseg [used] ein Wert der um +2
Bytes größer ist drinnen steht (AVRStudio 4.16 Bugfix)
2.) Fuses und Lockbits richtig ? Wenn du AVRootloader.ASM kompilierst
schaue in das Messagewindow vom AVRStudio was dort steht wie du die
Fuses setzen sollst. Exakt so im AVRStudio auch einstellen (BOOTSZ
Fuses)
Clock-Fuses korrekt ? CKDIV8 Fuse ?
3.) geht die Kommunikation ? also erstmal RX-TX am Dongle verbinden und
schauen das AVRootloader.exe bei [Timeouts] Options=1 eine 1-Wire
Verbindung erkennt. Im Protokoll Fenster siehst du das einmal das
empfangen wird was gesendet wurde. Mit diesem Test hat man also die
Kommunikation bis nach dem Dongle (MAX232, FTDI usw.) getestet. Bei
1-Wire RS232 Dongle aus 1-Wire.png ist das natürlich inklusive.
4.) nun in AVRootloader.asm UseRS485=1 setzen und DE_PORT/DE_PIN auf
einen Pin an dem zb. eine LED nach VCC angeschlossen wurde, oder
UseRS485Invert=1 setzen invertiert die Logik. Nun solltes du jedesmal
wenn der Bootloader selber sendet die LED aufleuchten sehen (evntl.
Baudrate geringer setzen)
5.) BootSign: ist identisch zum BootSign im AVRRootloader.exe ?
6.) UseAutoBaud=1 gesetzt ?
7.) BootDelay nicht zu knapp bemessen ?
8.) überschneiden sich RX/TX Pin/PORT mit dem ISP/DebugWire ? Wenn ja
könnte sich beides gegenseitig stören.
9.) eigene Hardware überprüfen, VCC stabil ?
10.) Schwingt der Quarz ?
Falls irgendwas von diesen Tipps dein Problem lösen sollte bitte teile
es mir mit, so kann ich bei ähnlichen Anfraen gezielter reagieren.
Gruß Hagen
Hallo Hagen.
Danke für die prompte Antwort.
Habe die aktuellste Version von dir genommen und da ging es auf anhieb.
Finde es ein bischen blöd im Forum die ganzen Beiträge durchzuschauen um
die aktuellste Version herauszufinden.
Aber dein Bootloader ist echt gut. Vielen vielen Dank.
MFG Alex
Hallo zusammen,
zunächst einmal SUPER, daß es mit diesem Bootloader prinzipiell extrem
einfach ist eine neue Software auch in das Pollin AVR-Net-I/O-Board zu
bekommen. Endlich kann ich meinen ISP-Programmer beiseite legen.
Soweit so gut. Konkret habe ich vor die EtherSex-Firmware mittels
AVRootloader aufzuspielen. Mit einem über die Webseite vom ethersex
erstellten image (Größe 72k) klappt das auch bestens, jedoch beinhaltet
die so erstellte Version außer einer HTML-Seite nichts - und das reicht
mir verständlicherweise nicht aus.
Daher habe ich mir mittels GIT das gesamte respository auf den
Linux-Rechner geladen. Compilieren klappt auch bestens, jedoch läßt sich
das erstellte HEX-File (trotz 55K Größe) partout nicht mittels
AVRootloader auf den ATMega32 aufspielen.
Ich bekomme immer folgende Fehlermeldung:
Hi,
vielleicht sind es einfach die Zeichen am Zeilenende ?
Mal mit einem Editor von UNIX nach Windows wandeln der Hex Datei ?
zB. mit Notepad++....
Gruß Sven
Zeige mal das HEX File.
Dieser Fehler bedeutet exakt das was er aussagt: das HEX File ist
ungültig und fehlerhaft. Entweder ist es kein gültiges Intel HEX Format,
oder es enthält Records die nicht im Standard definiert sind, oder in
den einzlenen Zeilen mit den Daten sind Sonderzeichen drinnen also kein
HEX, oder die CRC über eine Zeile stimmt nicht.
Das ich das jetzt nicht genauer in der Fehlermeldung aufgechlüsselt habe
möge man mir verzeihen, aber wann kommt solch ein Fehler schon vor.
Gruß Hagen
@Sven:
>vielleicht sind es einfach die Zeichen am Zeilenende ?>Mal mit einem Editor von UNIX nach Windows wandeln der Hex Datei ?
Nee das kann es nicht sein. Grundsätzlich baue ich solche Parser immer
so das es Sonderzeichen wo Sonderzeichen möglich sind auch ignoriert.
Dh. an irgendeiner Stelle, wo laut Standard klar definiert wurde was da
zu stehen hat, steht in seinem HEX File irgendwas was da nicht
hingehört.
Gruß Hagen
@Alex:
>Finde es ein bischen blöd im Forum die ganzen Beiträge durchzuschauen um>die aktuellste Version herauszufinden.
Ja ich weiß und ich hatte auch schonmal angedacht im Wiki ein Artikel zu
bauen. Aber die liebe Zeit reicht nicht aus.
So bleibt nur ein Tipp von mir: lese den Thread von Unten nach Oben,
dann wirst du mit Sicherheit die aktuellste Version als erstes finden.
Denn ich verspreche dir das ich chronologisch betrachtet nicht in der
Lage bin eine zukünftige Version schon in der Vergangenheit fertig zu
stellen ;)
Gruß Hagen
Hallo Hagen,
danke für die schnelen Rückantworten (auch Dank an Sven)
Hagen Re wrote:
> Dh. an irgendeiner Stelle, wo laut Standard klar definiert wurde was da> zu stehen hat, steht in seinem HEX File irgendwas was da nicht> hingehört.
Feature-Request: fehlerhafte Stelle anzeigen und genaueren Grund angeben
Da ich die Original Debian-Pakete OHNE jegwelche Änderungen verwende
kann ich mir eigentlich nicht vorstellen, daß der Compiler hier Murks
macht.
Aber vielleicht hilft dennoch folgender Hinweis:
In einer funktionierenden Datei endet diese beispielsweise mit:
1
:1066A000B1F6D363BA6B8B95869F12841FEB668617
2
:1066B0007FF6B6B56AB249D283E3D1713A62B66663
3
:0C66C000C8E77F006C0B23456810000049
4
:00000001FF
Eine nichtfunktionierende Datei sieht am Ende hingegen so aus:
1
:104E2000CE010E94DE2708C0E114F10419F0F70159
2
:104E3000C1937F019A9449F7E114F104A9F0F701B5
3
:104E4000108
gezeigt sind jeweils die letzten Zeilen. EVentuell hilft das ja noch zr
Fehlereingrenzung
Jo das hilft sehr, deine fehlerhafte HEX Datei wurde abgeschnitten, es
fehlt der Rest.
Letzte Zeile :104E4000108
Es folgen 0x10=16 Bytes die an Adresse 0x4e40 gespeichert werden sollen
da Recordtyp 0x00. Danach folgen die Datenbytes 0x10 und 0x8? aber wo
ist der Rest der angeblichen 16 Bytes und deren CRC ?
>Feature-Request: fehlerhafte Stelle anzeigen und genaueren Grund angeben
Jo das wäre sinnvoll aber aus der Abwägung diverser Zeitgründe heraus
nicht sofort.
Gruß Hagen
>>Feature-Request: fehlerhafte Stelle anzeigen und genaueren Grund angeben>> Jo das wäre sinnvoll aber aus der Abwägung diverser Zeitgründe heraus> nicht sofort.
OK, das passt schon. Dann werde ich in der Zwischenzeit mal in Erfahrung
bringen, warum das Paket der aktuellen DEBIAN-Installation (lenny, 5.0)
den Murks macht oder ob es das FTP-Programm zwischen Linux und
Windows-Rechner war. Ich werde berichten.
Hagen Re wrote:
> ...deine fehlerhafte HEX Datei wurde abgeschnitten, es fehlt der Rest.
In der Tat, auf dem Linux-System ist die Datei korrekt, packe ich sie
mit GZIP und transferiere sie dann und entpacke sie anschließend auf dem
WIndoff-System wieder ist sie auch auf diesem korrekt. Lediglich beim
direkten Transfer wird die Datei immer an der selben Stelle
abgeschnitten. Selbst wenn ich als Transferart BINARY einstelle passiert
dies. Nun ja, ganz herzlichen Dank für den Hinweis, aber da hätte ich im
Traum nicht dran gedacht, ist mir auch noch nie passiert. Aber nun
behelfe ich mir halt immer mit vorangegangenem GZIP und gut ist.
Nochmals Danke!
Den Feature-Request lasse ich natürlich trotzdem bestehen. :-)
Hello all,
I´m sorry, I dont know German language, my apologies.
Is there a way to get the email of Mr. Hagen, please, in order to
contact him? I would like to know more about the bootloader.
Best regards,
Luiz
luiz,catalan at gmail.com
Hallo,
ich versuche mit dem Bootloader einen Mega88 über einen FTDI FT232R zu
flashen, leider ohne Erfolg.
Die "üblichen Verdächtigen" habe ich schon durchgearbeitet.
Problem:
Der Bootloader funktioniert mit MAX232, aber nicht mit dem FT232R
Der AVRootloader findet zwar das Device korrekt, aber kann's nicht
Flashen.
Immer ähnliche Fehler:
Ab 115200baud kommt ab Version 4 auch keine Verbindung mehr zustande.
Es klappt auch, den 1-Wire-Modus wird zu erkennen, wenn ich RXD und TXD
verbinde. Mit H-Term kann ich über den FT232R Daten zum µC schicken und
bekomme auch Welche zurück. An der Schaltung kann es also eigentlich
nicht liegen, das
1
.equUseUartInvert=1
ist auch korrekt, denn beim MAX ist es auch nötig, und da funktioniert
es ja auch.
Bin ratlos!
Habe schon verschiedene Quarze, Einstellungen ausprobiert, immer der
gleiche Fehler.
Wäre sehr dankbar für jegliche Ratschläge!!
Gruß Jan
>wie berechnet sich auch F_CPU/x die 250ms?? Was für ein Teiler ist für >18,432MHz empfehlenswert?
XTAL/x, möchtest du 1 Sekunde / 4 = 250 Millisekunden warten so setze
BootDelay = XTAL/4 da 250ms = 1 Sekunde / 4 ist. Weist du wieviele Takte
eine MCU mit XTAL = 18,432MHz benötigt für 1 Sekunde ? Ich denke das
wird die Lampe zum leuchten zu bringen ;)
Die schlußendliche Wartezeit in BootDelay ist eher eine Funktion der
eingestellten Baudrate un damit immer ein Kompromiß. Je höher die
Baudrate und das BootDelay desto öfter kann die PC Software einen
kompletten Connectionstring wiederholt aussenden, ergo desto
wahrscheinlicher ein gültiger Verbindungsaufbau. Je geringer die
benutzte Baudrate und je kürzer das BootDelay desto weniger
Connectiongsrings kann die PC Software senden.
Nun zu deinem eigentlichen Problem:
Öffne AVRootloader.ini und setze in Sektion [Timeouts] das Topic "Base="
mal auf 100. Statt wie im Standard 50ms auf 100ms. Dieser Timeoutwert
ist bei Treibern wie dem des FTDI, virtueller COM Port, manchmal sehr
entscheidend. Die VCOM-Treiber sind in ihrem Timing angewiesen auf das
Gesamttiming der CPU, eg. Tasksheduler und laufende Task im
Gesamtcontext des Betriebsystemes.
Benutze bitte die aktuellste Version, diese ist zZ. Version 6.
Gruß Hagen
Ansonsten scheint es bei dir irgndwelche sporadischen
Timing-/Kommunikationsfehler zu geben. Die fehlermeldungen sind also
nicht speziell auf ein Modul, eg. eine spezielle Aktion/Kommando wie
Erase, Program, FLASH oder EEPROM etc.pp. bezogen sondern auf das Timing
oder Datenübertragung.
Deswegen kann ich dir nur den Tipp geben mal den Timeout.Base Wert in
der INI zu erhöhen. Ansonsten mal schauen ob deine Spannungsversorgung
des FTDI stabil ist. Ich weiß ja nicht ob dein FTDI Modul ein fertig
gekauftes oder selber aufgebautes ist, bei Selbstbau stellt sich die
Frage ob die USB Anbindung ordentlich terminiert ist.
Mit BootDelay=XTAL/4 habe ich gute Erfahrungen gemacht. Damit konnte ich
in diversen Projekten immer eine Verbindung aufbauen, speziell wenn
UseResetDelay=1 eingestellt ist. Also zb. ATTiny45/44/461 mit internem
RC-Oszillator und/oder 64MHz PLL Takt oder 20Mhz ext. Quarz bei
Baudraten von 4800 bis 112500 oder ATMega162 mit ext. Quarz, alles
jeweils in 1/2-Wire mit USB-RS232 Wandler, normaler RS232 mit/ohne MAX
Pegelkonverter oder sogar an XPORT TCP/IP-RS232 Wandler bis 256000 Baud
oder am USB-RS485 Bus. Hm, also im Grunde in jeder möglichen
Konfiguration und bisher in diesem Thread erwähnter Hardware.
Gruß Hagen
Hallo Hagen,
danke für die schnelle Antwort!
Ok, jetzt ist das mit dem Delay und dem Teiler klar - war mir wohl zu
einfach, um es zu verstehen :-)
Hatte auch schon mal mit den Timings herumprobiert.
Mit Basis 100 kommen folgende Fehler, je nach Baud:
unter 115200Baud Dieser:
...
das verbinde ich dann mit einem ca. 100mm langen Flachbandkabel an
folgendes Board:
http://www.minimexle.de/shop/links.php
Schaltplan siehe Bauanleitung MiniMEXLE V2.0 Seite 7 von 35.
Bye, Jan
Hast du vielleicht einen kommerziellen USB-RS232 Konverter rumliegen ?
Falls ja probiere es mal mit dem. Ich denke nämlich das irgendwas mit
deinem Aufbau nicht stimmt. Die Fehlermeldungen die du bekommst sind
nicht nachvollziehbar und an Stellen bei denen mit funktionierender
Datenübertragungen nie irgendwelche Fehler auftreten. Zb.
"Cmd.SetBuffer.ResCheck(2) Error: 00 operation failed", der Code 0x00
ist normalerweise garkein Fehlercode, Fehlercodes sind 0xC? kodiert. Dh.
an eine Stelle im Code erwartet die PC-Software einen Returncode wie
0x3? oder 0xC? bekommt aber ein falschen Code zurückgemeldet. Das kann
nur passieren wenn irgendwas bei der Datenübertragung schief gelaufen
ist. Denn es gibt nur zwei Gruppen von gültigen Returncodes, 0x3? die
SUCCESS-Codes und 0xC? die ERROR-Codes, kannst du in AVRootloadr.inc
nachlesen. Die PC-Software empfängt aber den Wert 0x00 als Returncode
und der ist falsch.
"Cmd.SetBuffer.WriteData() ICOM: write error." deutet darauf hin das ein
Timeout beim Schreiben=Senden von Daten auftrat. Nun ist es aber so das
normalerweise niemals Timeouts beim Schreiben passieren da die Treiber
ja gepuffert mit einem sehr großen Sendebuffer arbeiten. Dieser Fehler
dürfte garnicht auftreten und deutet eher daraufhin das der USB Kanal
hardwartechnisch gestört sein könnte. Deshalb meine Frage mit deinem
Aufbau.
Gruß Hagen
Hagen wrote:
> Hast du vielleicht einen kommerziellen USB-RS232 Konverter rumliegen ?
--> LogiLink USB zu RS232 Adapter und davon weiter mit
MAX-Adapterplatine funktioniert, so wie nur mit MAX-Adapter am COM des
PC
Muss wohl wirklich irgendwie an der FT232R Platine liegen, obwohl die
nun wirklich überschaubar ist und für puren Datentransfer in beide
Richtungen funktioniert.
Habe gerade eine andere Platine fertiggelötet, dort ist ein FT232BL
drauf, werd's gleich mal damit probieren, evtl. geht es ja bei dem
Layout.
Grüße, Jan
Hallo,
scheinbar liegt es ja an meiner kleinen Adapterplaine.
Kann jemand andere Werte für die Kondensatoren vorschlagen, mit denen es
erfolgreich funktioniert?
(Habe die Werte direkt aus dem Datenblatt von FTDI übernommen.)
Schaltplan siehe 4 Beiträge Schaltplan FTDI FT232RL (4 Beiträge zurück
nach oben).
Danke im Voraus,
Jan
>--> LogiLink USB zu RS232 Adapter und davon weiter mit>MAX-Adapterplatine funktioniert, so wie nur mit MAX-Adapter am COM des>PC
Probiere doch mal den 1-Wire-RS232 Adapter den ich im Bild 1-Wire.png im
ZIP beigelegt habe am LogiLink Adapter. Du kannst auch 2-Wire direkt an
der RS232-DB9 anschließen, habe ich auch schon so am Laufen. Dazu nur
einen 2k7 Widerstand in der TX-Leitung und RX direkt am Pin des AVRs.
Bei direktem Anschluß an der DB9 immer UseUartInvert=0 setzen.
Gruß Hagen
Hi Hagen,
nachdem der Thread mittlerweile, in meinen Augen, ein wenig
unübersichtlich geworden ist, spricht was dagegen, das ich einen Artikel
drüber anlege, anfange?
Grüße
Wolfgang
Nicht im Geringsten, ich wäre dir sogar sehr dankbar da meine Zeit sehr
knapp ist. Wenn du aber Fragen haben solltest dann melde dich bei mir
per PN damit ich dir eine ausführlichere Antwort geben kann. Ich bin bis
jetzt noch nichtmal zur Dokumentation des Protokolles gekommen.
Gruß Hagen
Habe heute meine andere Platine (USB<->433MHz) mit dem FTDI FT232BL in
Betrieb genommen. Da funktioniert der Rootloader 6.0 bestens!
Werde bei Gelegenheit mal die Adapterplatine für den FT232R neu Routen,
evtl. geht es ja dann.
Bye, Jan
So, hal mal den Artikel
http://www.mikrocontroller.net/articles/AVR-Bootloader_mit_Verschl%C3%BCsselung_von_Hagen_Re
"AVR-Bootloader mit Verschlüsselung von Hagen Re" angelegt und die
Historie aus diesem Thread, soweit nachvollziehbar rüber genommen.
Jetzt sollte man rangehen und die ganzen Connect-Möglichkeiten
(Schaltbläne mal auflisten, bzw. die mittlerweilen vielen Paramter
auflisten, erklären.
@Jan Spieler
> scheinbar liegt es ja an meiner kleinen Adapterplaine.> Kann jemand andere Werte für die Kondensatoren vorschlagen, mit denen es> erfolgreich funktioniert?> (Habe die Werte direkt aus dem Datenblatt von FTDI übernommen.)
Hallo Jan !
Mein Aufbau sieht eigentlich genauso aus, auch die Kondensatoren wie im
Datenblatt. Was für einen Ferrit nutzt du denn (abgesehen davon das du
ein Symbol von ner Diode genommen hast) ? Ich hab bei mir 10 µH !
Meine Kommunikation läuft mittlerweile sehr stabil auf 128.000 Baud.
Gruß Stefan
PS: Und immer den neuesten Bootloader verwenden ! Kann Wunder bewirken !
:-)
Stefan R. wrote:
> Was für einen Ferrit nutzt du denn (abgesehen davon das du> ein Symbol von ner Diode genommen hast) ?> Ich hab bei mir 10 µH !> Meine Kommunikation läuft mittlerweile sehr stabil auf 128.000 Baud.>> Gruß Stefan> PS: Und immer den neuesten Bootloader verwenden ! Kann Wunder bewirken !> :-)
Hallo Stefan,
vielen Dank für die Rückmeldung!!!
Ich habe bei Pollin folgenden Artikel bestellt:
1
Perlendrosseln 250 309
--> Die Diode fand sich nur grad so am schnellsten als passendes Package
(ich weis: schlechter Grund)
Leider ist bei Pollin keine Induktivität der Ferritperle angegeben!
Habe auch folgendes von Reichelt, kann ja mal die Ferritperle gegen die
Spule austauschen (einziges Problem --> SMD statt THT):
Erst mal vielen Dank für die Infos,
habe auch noch vor, mit dem Oszi die Spannungsversorgungspins des FTDI
zu prüfen, ob das Layout evtl. einen schlechten Einfluss hat. Bei meinem
FT232B-Board ist eine Massefläche zw. den Daten und VCC Leiterbahnen,
beim FT232R-Board nicht.
Hab heut leider keine Zeit mehr, aber morgen werd ich das mal prüfen und
die Induktivität einlöten.
Grüße,
Jan
> Ich habe bei Pollin folgenden Artikel bestellt:>
1
Perlendrosseln 250 309
> --> Die Diode fand sich nur grad so am schnellsten als passendes Package> (ich weis: schlechter Grund)> Leider ist bei Pollin keine Induktivität der Ferritperle angegeben!> Habe auch folgendes von Reichelt, kann ja mal die Ferritperle gegen die> Spule austauschen (einziges Problem --> SMD statt THT):>
Reichelt hat die auch als THT Bauteil: SMCC 10µ
> Erst mal vielen Dank für die Infos,> habe auch noch vor, mit dem Oszi die Spannungsversorgungspins des FTDI> zu prüfen, ob das Layout evtl. einen schlechten Einfluss hat. Bei meinem> FT232B-Board ist eine Massefläche zw. den Daten und VCC Leiterbahnen,> beim FT232R-Board nicht.
Ich glaub nicht das es am Layout liegt ! Die RX u. TX-Leitungen sind
nach meiner erfahrung relativ unempfindlich, außer du hättest
irgendwelche Bauteile die enorme EMV abstrahlen !
Gruß Stefan
@ All Perlendrossel von Pollin ist nicht für FT232R geeignet!!
Es lag an der Perlendrossel von Pollin. Ich habe diese gegen die
10µH-Induktivität getauscht und siehe da, Alles klappt bestens!!
Sogar bis 256.000baud!!
Danke nochmals für die Hilfe an Hagen und Stefan!
Wünsche noch schöne Oster-Tage,
Grüße, Jan
Hallo Hagen!
Ich würde bei mir gerne eine Art Zweites AppVersion einbauen (also eine
Zahl die im AVR gespeichert ist und die ich mittels Programm auslesen
kann)
Auf AVR Seite sehe ich da kein Problem, da ich einfach ne Kopie von
AppVersion nehmen kann, aber wie kann ich die aus Delphi heraus abfragen
?
Kannst du mir da vielleicht nen Tip geben ?
Wie weit ist eigentlich die Funktion um den Bootloader abzudaten ?
Funktioniert das schon ?
Viele Grüße
Stefan
Hallo,
super Bootloader.
Habe mit Tiny13 ein kleines Problem
Bekomme beim Versuch des programmieren folgende Fehlermeldung:
Error: Can not find RJMP to Main
Wo finde ich Beschreibung der Fehlermeldungen?
Vielen Dank im Voraus,
Grüße
Oliver
@Stefan,
die AppVersion besteht aus 4 bytes, wie eine IP Addresse, und der Wert
255 ist reserviert. Was spricht nun dagegen diese AppVersion als zwei 2
Bytes Versionsnummern zu betrachten ?
Aus Delphi heraus mit der AVRootloader.dll meinst du wohl. Das
IAVRootloader Interface unterstützt einige Sub-Interfaces. Das wären
IAVRootloader.COM: ICOM das Kommunikationsinterface, i.A. zur RS232 des
Betriebssystemes, das .Command: ICommand Interface zum Zugriff auf die
Lowlevel Kommandoebene eg. Protokoll des Bootloaders und das .Device:
IDevice Interface zum Zugriff auf alle Parameter des aktuell connected
AVRs. Letzeres ist das was du brauchst.
Das IDevice Interface sieht so aus:
1
IDevice=interface
2
['{9EC8A92B-F6BB-47F3-A9C9-DF8F4F481F49}']
3
functionSignature:Integer;stdcall;
4
functionName:WideString;stdcall;
5
functionInfo:WideString;stdcall;
6
functionFlashSize:Integer;stdcall;
7
functionAppFlashSize:Integer;stdcall;
8
functionAppVersion:Integer;stdcall;
9
functionAppVersionString:WideString;stdcall;
10
functionEepromSize:Integer;stdcall;
11
functionRamSize:Integer;stdcall;
12
functionRamStartAddress:Integer;stdcall;
13
functionPageSize:Integer;stdcall;
14
functionBufferSize:Integer;stdcall;
15
functionVersion:Integer;stdcall;
16
functionUseBootSection:Bool;stdcall;
17
functionRetCode:Byte;stdcall;
18
functionSupport:Integer;stdcall;
19
functionXMLFileName:WideString;stdcall;
20
end;
und die Methode .AppVersion: Integer ist das was du suchst.
Also mit
>Wie weit ist eigentlich die Funktion um den Bootloader abzudaten ?>Funktioniert das schon ?
Ja und Nein ;) Ja in dem Sinne das der Assemblerteil das schon voll
unterstützt. Er kann je nach Wunsch verschienden Funktionen einbinden
über die es mögich ist den Bootloader selber neu zu programmieren. Das
hatte ich oben im Thread schonmal beschrieben. Essentiell ist es so
gelösst das in der letzten FLASH Page diese Funktionen ausgerichtet
sind. Man kann also mit diesen Funktionen alle FLASH Pages bis zum Begin
der letzten FLASH Page mit diesen Funktionen auf sichere Weise neu
programmieren. Über die Sprungtabelle ganz am Ende des FLASHs kann die
eigene Anwendung diese Funktionen aufrufen.
Nein in dem Sinne das es noch keine vorgefertigte Anwendung für die AVRs
gibt die nun diese Funktionen benutzt um einen neuen Bootloader zu
programmieren.
Dh. konzeptionell bin ich von Anfang an davon ausgegangen das der
Bootloader selber sich nicht selbst updaten kann. Sondern das er erstmal
eine Update-Anwednung in den normalen App-FLASH programmiert, diese dann
startet und erst diese Anwendung updated den Bootloader. Die letzte
FLASH Page aller Botloader wäre dann immer identisch. Dieses Vorgehen
hat mehrere Vorteile aus Sicht der Sicherheit und Stabilität. 1.) würde
diese Anwendung im aktuellen Gerät keinen Schaden anrichten da sie
keinerlei Pins benötigt. 2.) würde diese Anwendung solange gestartet
werden wie sie im AVR ist und der neue Bootloader noch nicht
programmiert. 3.) würde diese Anendung universell für alle AVRs
funktionieren. 4.) das HEX File dieser Anwendung enthält am Ende als
Datenbereich im FLASH den neuen Bootloader. 5.) sie würde ein
Prüfsummenverfahren benutzen um sicherzustellen das der soeben
programmierte Bootloader mit dem in der Anwendung gespeicherten Kopie
identisch ist. Die gleiche Prüfsummenlogk kann auch benutzt werden um
beim Start der Anwendung zu überpüfen ob der neue Bootloader schon
installiert wurde.
Extern bräuchte man ein vorkompiliertes HEX File dieser Anwendung. Das
landet zusammen mit dem neuen Bootloader HEX in eine kleine EXE die beie
HEX Files merged. Diese HEX File könnte dann mit Hilfer der PC-Sowftare
in ein kryptographsich geschütztes ACY File umgewandelt werden und man
hat somit auch hier wieder den Updateschutzt integriert. Diese Funktion
des Zusammenfassens beider HEX Files könnte in die PC-Software
integriert werden.
So jedenfalls wäre mein Konzept. Allerdings brauche ich es perönlich
nunmal garnicht und stehe zur Auffassung das ein Bootloader einmal
konfiguriert wird und sich danach nie wieder ändert sobald er im Gerät
programmiert wurde.
Gruß Hagen
@Oliver:
>Error: Can not find RJMP to Main
Lass mich raten, dein Source ist in Assembler programiert und du benutzt
bei .org 0 im Source keinen Reset Vektor ?
Dh. an der ersten Addresse (0x0000) im Program steht normalerweise immer
ein RJMP Main, also ein Sprung zu deiner Hauptroutine des Programmes.
Die Addresse 0x0000 wird immer dann angesprungen wenn der AVR
gestartet/resetted wurde.
Meine PC-Software sucht nun nach diesem RJMP um die Startadresse der
Main zu berechnen. Denn bei den Tinys gibt es ja keine eigene Bootloader
Section im FLASH und deshalb wird getrickst indem die Software diese
RJMP Main in RJMP BootStart patcht. Der Orgiginale Sprung zu Main wird
in die 2 Bytes vor BootStart in das HEX File gepatcht. Somit weis der
Bootloader später wo er hinspringen muß wenn der die Anwendung starten
möchte.
Falls meine Vermutung richtig ist so baue mit
1
.org 0
2
rjmp Main
3
4
Main:
diesen Sprung bitte ein.
Ansonsten bliebe noch die Möglichkeit das dein HEX File beschädigt ist.
Gruß Hagen
Hallo Hagen !
> die AppVersion besteht aus 4 bytes, wie eine IP Addresse, und der Wert> 255 ist reserviert. Was spricht nun dagegen diese AppVersion als zwei 2> Bytes Versionsnummern zu betrachten ?
Stimmt eigentlich ! Daran hab ich noch garnicht gedacht !
>
1
>ifAVRootloader.DoConnect(True)then
2
>try
3
>Version:=AVRootloader.Device.AppVersion;
4
>finally
5
>AVRootloader.DoDisconnect;
6
>end;
7
>
Das hab ich schon implementiert ! Genauso wie die Neuprogrammierung der
AppVersion.
>So jedenfalls wäre mein Konzept. Allerdings brauche ich es perönlich>nunmal garnicht und stehe zur Auffassung das ein Bootloader einmal>konfiguriert wird und sich danach nie wieder ändert sobald er im Gerät>programmiert wurde.
Hast du eigentlich auch wieder Recht. Ist für mich auch nicht
ausschlaggebend. Hat mich nur interressiert, weil du es mal erwähnt
hattest.
Danke !
Gruß Stefan
Hallo an alle,
kann mir vielleicht irgendjemand ein paar Informationen geben, wie ich
mit der AVRootLoader.dll unter C++ umzugehen habe? In Delphi scheint das
ja alles ganz einfach zu sein - einfach den 'Header' unter 'uses'
angeben, die nötigen Methoden der IApplication implementieren und
fertig. Aber auch nach ausgiebiger Netzrecherche habe ich nicht
herausgefunden, wie man selbiges in C++ anzustellen hat.
Wie muss ich grundsätzlich vorgehen um diese DLL einzubinden, das
IApplication-Interface zu implementieren und letzten Endes ein
IAVRootloader Objekt zu erhalten?
Für jeden auch noch so kleinen Ansatz einer Hilfestellung wäre ich sehr
dankbar :)
Gruß
Marcel
Hi Marcel,
im Grunde exakt so wie in Delphi, mit dem Unterschied das diese
Interface Unit als C++ Header transliert werden muß. Im einfachsten
Falle einen Recordtyp deklarieren. Es müssen nun alle Methoden
angefangen bei IUnknown bis zu meinen Interfaces in exakt der gleichen
Reihenfolge als procedurale Member, Funktionszeiger, in diesem Record
deklariert werden.
Ich kenne mich in C++ und seiner Unterstützung für Interfaces nicht aus,
aber da diese Form der Interfaces eine unterstützte Methode bei
Microsoft Windows Produkten ist, siehe ActiveX,COM,DCOM usw., dürfte das
auch vom C++ unterstützt werden. Ich kann dir aber den grundsätzlichen
und internen Aufbau, sprich Funktionsweise von solchen Interfaces und
deren allozierten Objekten quasi in prozeduraler Sprache erklären.
Ein alloziertes interfaced Objekt ist ein Zeiger auf einen Record.
Dieser Speicherbereich enthält als erstes Member einen Zeiger auf die
VMT-> Virtual Method Table, also wiederum einen Record in dem alle
Methoden als Zeiger eingetragen sind. Jede dieser Methoden wird einen
impliziten unsichtbaren 1. Parameter erwarten, nämlich Self oder This,
der Zeiger auf diesen Record = alloziertes Objekt. Nach dem VMT zeiger
kommen schon private Member, quasi Objekt/Klassenbezogene Datenfelder.
Das ist quasi schon der ganze Trick der sich OOP nennt. Entscheidend ist
das der Compiler das als "Sprachfeature" uterstützt und nun zb. diesen
impliziten Parameter Self/This einer Objektmethode unsichtbar macht, das
er bei Interfaces abgeleitet von IUnknown automatisch die
Stanardmethoden ._AddRef und ._Release aufruft um eine
Referenzzählung/Lebenszeitzähler/Garbage Collection und wie das alles
bennant wird, machen zu können. Und als dritter wesentlicher Punkt wird
der Compiler eine Unterstützung von Typcast solcher Objekte
implementieren indem er transparent und unsichtbar für den Entwickler
die Methode ._QueryInterface() eines Objektes aufruft.
Nungut in Delphi/PASCAL sähe also ein manuell erzeugtes IUnknown
Interface/Objekt so aus:
Wie du siehst so schwierig ist das Konzept OOP als Umsetzung in unsere
Programmiersprachen garnicht.
Da meine DLL schon den ganzen Quatsch mit der Allozierung/Freigabe usw.
selber macht brauchts du eigentlich nur den richtigen Recordtyp für
deren VMTs zu deklarieren und musst dann den Zeiger auf das Objekt, ergo
IAVRootloader usw. alle den Methoden die du aufrufen möchtest als ersten
Param übergeben.
Aber das wäre der manuelle Weg und C++ sollte eigentlich von Hause aus
Interfaces unterstützen.
Schau auch mal hier rein dort habe ich ein anderes Beispiel gepostet:
http://www.delphipraxis.net/topic7357_waitcursor.html&highlight=forged+interfaces
In diesem Thread und folgende beschreibe ich wie und warum ich solche
Interfaces in meinem DEC Math benutzt habe:
http://www.delphipraxis.net/topic14699,0,asc,77.html
Du könntest also auch den manuellen prozeduralen Weg gehen und damit auf
die C++ Sprachfeatures für die Unterstützung von Objketen und deren
Interfaces ganz verzichten.
Leider kenne ich mich in diesem Punkt eben mit C++ nicht praktisch
konkret aus und würde hier auch PASCAL/JAVA oder sogar moderen BASIC
Dialekte dem C++ vorziehen.
Gruß Hagen
Übrigens findet man eine Menge im Netz zu C++ und Interfaces, zb. hier
http://www.learncpp.com/cpp-tutorial/126-pure-virtual-functions-abstract-base-classes-and-interface-classes/
ab Abschnitt "Interface-Classes".
Du musst halt nur darauf achten das die Interfaces in meiner DLL schon
abgeleitet von IUnknown (IInterface in Delphi) sind und damit die 3
vererbten Methoden .QueryInterface(), ._AddRef() und ._Release() nicht
vergessen.
Gruß Hagen
Hallo Hagen,
ich versuche einen ATmega128 per Bootloader(V6) zu flashen.
Das funktioniert immer genau 1 mal, danach kommt keine Verbindung zum
AVR mehr zustande.
Also wird vermutlich der Bootloader überschrieben.
Habe jetzt alle möglichen Lockbit-Kombinationen getestet, der Bootloader
wird trotzdem wohl jedesmal überschrieben.
Habe die Lockbits nach einem früheren Beispiel mit einem AtMega8535
programmiert = gleiches Ergebnis.
Also LB = disabled,BLB0=SPM prohibited in App.Sektion,BLB1=No lock on
SPM and LPM.(andere Kombinationen im Bootbereich auch erfolglos
getestet)
Bootflashsize and Bootreset sollten passen.
Irgendwie sehe ich den Baum vor lauten Wäldern nicht.
Gruß
bandgap
BOOTSZ Fuses nicht gesetzt. Dh. du hast die Boot Section nicht aktiviert
was dazu führt das der Bootloader nicht per RESET angesprungen wird.
Stattdessen startet der AVR bei Adresse 0x0000 und da ab diesen
Speicherzellen bis zum Bootloadercode alles der Opcode 0xFFFF steht,
gleich wie NOP, läuft der AVR in den Bootloader rein. Aber sobald der
Bootloader eine Anwendung geflasht hat wird er selber niemehr aufgerufen
es sei denn deine Anwendung macht dies. Dh. setze deine BOOTSZ Fuses
richtig, aktiviere damit die Bootloader Section im FLASH damit der
Bootloader beim RESET auch gestartet wird, dann klappt es auch und du
hast Zeit die Datenblätter im Bereich "Memory-Progarmming" nochmals zu
lesen ;)
Gruß Hagen
Hallo Hagen,
vielen Dank für die Hinweise. Der Fehler war in den Einstellungen der
PC-Software. Connect-Timeout war auf 0, der Verbindungsaufbau wurde
einfach zu schnell abgebrochen.
Hab ich jetzt auf 500ms geändert, funktioniert nun alles bestens.
Gruß
bandgap
Wenn der Connect-Timeout <= 0 ist wird stattdessen der Wert in Base
benutzt. Ein guter Wert für Base ist 50 Millisekunden. Aber diese
Timeouts sind keine direkte Erklärung für das Verhalten bei dir.
Denn der Verbindungsaufbau erfolgt immer von PC-Seite und wenn diese
einen Versuch startet dann im Normalfalle ohne zeitliches Ende, also nur
durch manuellen Eingriff des Benutzers wird dieser dann abgebrochen. Ich
kenne deine Konfiguration des Bootloaders leider nicht aber jenachdem
wie dieser konfiguriert ist, zb. UseAutoBaud=0 oder BootDelay sehr
klein, müssen stiktere Timings eingehalten werden.
Ein Überschreiben des Bootloaders ist eigentlich nicht möglich es sei
denn du hast die Spezialfunktionen so aktiviert und nutzt diese auch aus
deiner Anwendung heraus und überscheibst den Bootloader absichtlich.
Gruß Hagen
>Hab ich jetzt auf 500ms geändert, funktioniert nun alles bestens.
das bedeutet die PC-Software wartet jetzt 500ms auf eine Antwort vom
Bootloader. Entweder arbeitest du mit einer extrem geringen Baudrate
oder es ist noch irgendwas an der Kommunikation nicht sauber und stabil.
Normalerweise wird man im Connect Timeout einen Wert kleiner Base, also
so 10 oder 20 Milisekunden vorgeben damit man schneller einen Scan über
alle COM Port im AUTO Modus machen kann. Dh. diesee Einstellung ist
dafür gedacht noch schneller statt langsammer zu sein.
Ich empfehle dir also UseAutoBaud=1 zu setzen, BootDelay auf XTAL/4 =
250ms, UseResetDelay=1, UseWDT=1, UseBootMode=0. XTAL auf den richtigen
Wert des eingestellten Taktes.
Ein weiterer häufiger Fehler ist es BootCodeSize=0 zu setzen, bzw. nicht
korrekt berechnen zu lassen.
Sollte all dies nicht bei dir der Fall sein, dann kann es nur noch an
einer geringen Baudrate liegen oder eben schlechte Übertragung über die
RS232, sprich HW-Aufbau checken.
Gruß Hagen
Hallo Hagen,
ich habe die Einstellungen nochmal zurückgeändert nach deinen
Empfehlungen:
meine Einstellungen:
XTAL=7372800
Boot Delay=XTAL/4
UseBootMode=0
UseWDR=1
UseAutobaud=1
UseResetDelay=1
BootCodeSize liegt bei 516Bytes mit UseSRAM=1
RX_TX_Port=E => RS-232 / STK300
Controller Mega128
so kommt nur beim ersten Verbindungsaufbau eine problemlose Verbindung
zum Controller zustande.Nach dem flashen des Programms ist ein erneutes
Beschreiben des Controllers über den Bootloader nicht mehr möglich.
Es kommt keine Verbindung mehr zustande.Die PC-Software versucht über
COM1 und COM3(USB-Serial-Port) eine Verbindung zu erstellen bricht dann
aber mit :Error:no device found ab.
Wenn ich dann den BootDelay auf XTAL/2 hochsetze und den ConnectTimeout
auf 500ms so funktioniert der Verbindungsaufbau.(auch bei wiederholtem
flashen)
Mein erster Verdacht mit dem Überschreiben des Bootloader-Bereichs war
eine Schlussfolgerung aus der Tatsache das der erste Verbindungsaufbau
immer problemlos ist, wenn dann das erstemal über den Bootloader
geflasht wurde aber keine Verbindung mehr zustande kam.(Error:no device
found)
Grüße
bandgap
Ok, setze in der PC-Software als erstes mal den COM Port von AUTO auf
den Port an dem sich der AVR befindet. Probiere es dann nochmal mit
meinen empfohlenen Einstellungen. Möchtest du AUTO benutzen dann
verändere statt Connection Timeout den Wert in [System] ConnectTrials
auf zb. 6 oder mehr. Er steht jetzt auf 3 und das kann uU. ein
ungünstiges Timing im AUTO Modus bedeuten.
Wie startest du den Bootloader ? Durch einen RESET ?
Gruß Hagen
Hallo Haagen,
ich habe Heute Deinen Bootloader mal getestet,
voll cool, hat auf Anhieb funktioniert :-)
Jetzt wollte ich jedoch meinen Atmega8 via 1Wire flashen,
und da bekomme ich zwar eine Verbindung.
Connection : 1-Wire
Device name : ATmega8, ATmega8A
Device signature : 1E9307
SRAM size : 1024 Byte
EEPROM size : 512 Byte
FLASH size : 8192 Byte
FLASH size for application : 7680 Byte
FLASH pagesize : 64 Byte
Bootloader size : 512 Byte
Buffersize for data : 984 Byte
SRAM start address : 96
Bootloader version : 6
Use bootsection : Yes
Versioning supported : No
Cryptography supported : No
... doch leider wird diese sofort wieder abgebaut.
04.05.09-23:19:15-218 > Connecting on port COM2...
04.05.09-23:19:15-593 > Switch to 1-Wire mode
04.05.09-23:19:15-593 > Device connected
04.05.09-23:19:16-436 > Device disconnected
Als Anschaltung an RS232 habe ich die Schaltung aus dem Bild 1-Wire.png
verwendet.
UasUartInvert=0, direkt an RS232 das untere Bild ohne Schottky Dioden
einfach direkt auf die Schnittstelle.
Ich dachte mir, wenn das so einfach funzt brauche ich keinen MAX232 :-)
doch nun komme ich irgendwie nicht weiter.
PS:Kann es daran liegen das ich im Moment den internen Osczilator
verwende?
Schöne Grüße
Hannes
Hallo Hagen (jetzt auch richtig ;-))
sorry war mein Fehler, hab den Fehler jetzt gefunden!
Bei der Umstellung auf 1Wire habe ich vergessen
BootCodeSize von 432 auf 430 anzupassen.
Kaum macht man's, wie es beschrieben ist, so funzt es auch.
Schöne Grüße
und nochmals besten Dank für diesen coolen Bootloader.
Gruß Hannes
Schön das sich das Problem von selbst erledigt hat ;) Denoch kann ich
nicht nachvollziehen warum das an der falschen BootCodeSize gelegen
haben soll. Hast du irgendeine der UseSecialXXX Funktionen aktviert ?
Das wäre für mich jetzt die einzige Erklärung warum es zu Problemen
kommen sollte. Da du einen ATmega8 benutzt, der die Bootsections auch
unterstützt, berechnet das ASM an Hand des Wertes in BootCodeSize den
korrekten Reallocationspunkt, eg. Startadresse des Bootloaders. Nun,
beim AVRMega muß der natürlich an einer Grenze alloziert werden die mit
einer der programierbaren Bootsections begint. In deinem Falle also die
letzten 512 Bytes im FLASH. Ob in BootCodesize nun 432 oder 430 Bytes
drinnen steht macht ausschließlich nur dann einen Unterschied wenn man
die UseSecialXXX Funktionen aktiviert hat, in deinem Fall. Ich hoffe
also das dies der Fall ist ansonsten könnte ich mir nämlich nicht
erklären warum das bei dir nicht funktioniert haben sollte.
Die Standardvorgehensweise für die Installation des Bootloaders ist
folgende:
1.) ASM konfigurieren
2.) BootCodeSize=0 setzen
3.) kompilieren
4.) aus dem AVRStudio Message Window den Wert bei CSEG Used in
BootCodeSize setzen
5.) erneut das ASM kompilieren
6.) im Message Window nachschauen welche BOOTSZ Fuses man setzen soll
7.) HEX File in AVR flashen
8.) Fuses entsprechend setzen
9.) AVR mit PC verbinden, je nach Konfiguration
10.) Connect Versuch und Test Anwendung flashen lassen
Gruß Hagen
Dein Portmon.Log sagt mir folgendes:
- korrekter Verbindungsaufbau
- das erste mal sendet der PC das 0xFD00 Kommando und AVR antwortet auch
korrekt mit 0xC1 Fehlercode. Dieses Kommand ist das "Keep Alive"
Kommando das einerseits dazu dient das die PC-Software erkennt das der
AVR noch errichbar ist und andererseits den Watchdog Timer im AVR
zurücksetzt. Dh. wenn man UseWDT=1 hat so würde beim Ausbleiben dieses
Kommandos oder eben andere Kommandos der AVR nach ca. 2 Sekunden einen
Watchdog RESET durchführen.
- das zweite Keepalive Kommando das gesendet wurde wird aber durch den
AVR eben nicht mehr beantwortet. Daraufhin trennt die PC-Software
korrekterweise die Verbindung zum AVR.
Du hast also irgendeine ungewollte Verbindungsunterbrechung gehabt. Das
das nun an der leicht inkorrekten BootCodeSize gelegen haben soll, die
ja bei 512 Bytes Bootsection eh keinen Einfluß hätte, kann ich mir eben
nicht so recht vorstellen. Außnahme wäre halt die Aktivierung der
UseSpecialXXX Funktionen, nur müsstest du dann eine Kompilierwarnung
erhalten.
>PS:Kann es daran liegen das ich im Moment den internen Osczilator>verwende?
Eigentlich nicht, es sei denn du hast UseAutoBaud=0, XTAL zb. auf 8MHz
aber nicht die CKDIV8 Fuse programmiert. Dh. der AVR läuft real mit 1MHz
und die konfigurierte Baudrate wäre 8 mal langsammer als real nötig.
Aber das ist ja bei dir nicht der fall da du einen Connect bekommst.
Am besten ist es meinen Empfehlungen fürs erste zu folgen, hier im
Thread nachzulesen. Und ich empfehle immer UseAutoBaud=1 und UseWDT=1 zu
setzen. Mit UseAutoBaud=1 ist der MCU Takt fast irrelevant, falsche
Fuses oder falsche XTAL Einstellung würden dann nur den
Verbindungstimeout negativ beeinflussen.
Gruß Hagen
Hallo Hagen,
danke für die ausführliche Antwort.
>>UseSpecialXXX
ist bei mir deaktiviert
Auf die Antwort von Dir habe ich es nochmals versucht die BootCodeSize
zurückzuändert.
Doch "leider" funktioniert es jetzt trotzdem, d.h. wahrscheinlich hatte
ich tatsächlich ein anderes Problem und es hat sich zufällig mit
dem ändern der BootCodeSize in wohlgefallen aufgelöst.
Schöne Grüße
Hannes
Hallo Hagen,
jetzt hätte ich aber noch ein Frage.
Ich habe schon andere Bootloader getestet z.B. den von Peter Dannegger
(Auch sehr gut, nur das Verschlüsseln etc gefällt mir bei Deinem besser)
Damit ich jedoch ohne Reset mittels Bootloader flashen konnte,
mußte ich in meine Applikation eine Routine einbauen,
welche auf RX horchte und beim Empfang von 0xFF durch einen WD einen
Reset ausführte.
Funktionierte auch einwandfrei.
Jetzt ist nur die Frage, wie funktioniert das bei Dir,
dass Du in den Bootloader kommst während das Programm läuft.
Ich habe zwar die Funktion mit dem WD noch eingebaut, aber die horcht
auf RX und nicht auf den 1Wire Port PD5 welchen ich verwende.
Ich kann mir die Funktionsweise nicht erklären?!?
Wenn das Programm läuft ist doch der Bootloader komplett ohne Funktion
oder?
Schöne Grüße
Hannes
Hallo Hagen,
sorry aber anscheinend brauche ich es, dass ich was in das Forum
schreibt
damit bei mir entweder der Groschen fällt, oder es einfach funzt ;-)
Hab jetzt doch gefunden warum der autoconnect geht,
anscheinend aktivierst Du den WD im BL und wenn dieser nicht explizit
von
der Applikation deaktiviert oder bedient wird
erfolgt ein Reset.
Jetzt habe ich am Anfang meiner Applikation einfach den WD deaktiviert
:-)
Trotzdem schöne Grüße
Hannes
Andy F. schrieb:
> hab einen ATMEGA32 mit internen Takt , funkt da der bootloader?
Natürlich !
> wie muss ich denn den einstellen?
Was willst du jetzt wissen ? Wie du die Fuses programmieren mußt oder
welche Einstellungen im Bootloader ?
Bei den Fuses empfehle ich dir das Datenblatt vom Atmega32, und beim
Bootloader die wirklich ausführliche Anleitung, bzw. die Kommentare im
Bootloader selbst.
Keine Angst, so schwierig ist das garnicht !Sollte es wieder erwarten
nicht funktionieren, poste einfach deine Einstellungen nochmal !
Gruß Stefan
Hab die Fuses wie im Bild eingestellt und die Baudrate auf 2400 gestellt
und
dann kommt immer der Fehler Cannot setup baudrate to 2400
Den Port hab ich auf AUTO gestellt.
Wenn der PORT COM1 ist, tut sich nach minuten nichts.
kann das sein weil die baudrate zu größ ist?
denn wenn ich mit dem Mega32 was sende muss beim Hyperterminal 1200baud
eingestellt sein.
Hier der Log vom Programm
hab jetzt ext quarz mit 16Mhz am Mega32
im AVRootloader.asm hab ich bei Clock 16mhz eingestellt
und trotzdem kommt:
06.05.09-16:36:57-125 > Connecting on port COM1...
06.05.09-16:36:57-843 > Error: can not setup baudrate to 19200
06.05.09-16:36:57-906 > Error: can not setup baudrate to 19200
06.05.09-16:36:57-953 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-000 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-062 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-109 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-156 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-218 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-265 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-312 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-359 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-421 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-468 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-515 > Error: can not setup baudrate to 19200
06.05.09-16:36:58-578 > Error: no Device found
Was hast du da für einen COM Port bzw. Betriebsystem ?
Die fehlermeldung ist eindeutig, das Program kann über das Windows API
beim ausgewählten COM Port die eingstellte Baudrate nicht aktivieren.
19200 ist Standard und sollte von jedem COM Port unterstützt werden, von
deiner Hardware aber anscheinend nicht.
Überprüfe deine Hardware, deren Treiber, dein Betriebsystem oder benutze
eine Baudrate die dein Gerät auch unterstützt.
Gruß Hagen
@Hannes:
Die PC-Software unterstützt eine ganze Reihe an Möglichkeiten um den
Bootloader im AVR automatisch zu starten.
1.) Du kannst den RTS Pin der RS232 an den RESET des AVRs oder einen
anderen Pin legen. Angenommen du legst ihn an den RESET Pin dann kannst
du in der AVRootloader.ini mit den Einstellungen bei RTSPulse und
RTSInterval das exakte Timing, den Zeitpunkt, Logiklevel und Periode wie
die PC-Software die RTS Leitung der RS232, die am RESET liegt, steuert
einstellen.
Statt RESET Pin ginge natürlich auch ein anderer Pin der dann aber
innerhalb deiner Anwendung ausgewertet werden muß um in den Bootloader
zu springen oder per WDT einen RESET zu erzwingen.
2.) Wenn deine Awendung selber den UART benutzt dann kannst du auf
eigene, definierbare Kommandos zum Starten des Bootloaders reagieren.
Dazu werden in AVRootloader.ini die Werte in AppCmd und AppCmdResponse
und Timeouts.AppCmd konfiguriert. Die PC-Software sendet bei einem
Verbindungsaufbau als aller erstes den Wert=String in AppCmd. Zb.
AppCmd=startboot/0A/0D sendet den String startboot gefolgt von
Zeilenumbruch und Linefeed. Sonderzeichen also in der Form / + 2 HEX
zeichen. Sollte nun in AppCmdResponse ebenfalls was konfiguriert worden
sein so wartet die PC-Software nach Absenden des AppCmd auf diesen
AppCmdResponse. Zb. steht in AppCmdResponse=bootstart. Nach senden von
startboot wird deine Anwendung erstmal den Wert bootstart absenden und
dann zb. per WDT mit 17ms Timout den Bootloader starten. Es entsteht
durch den 17ms WDT eine kleine Zeitverzögerung und diese würdest du in
Timeouts.AppCmd=20 mit 20ms vorgeben. Also nach dem Empfang des
AppCmdResponse wird die PC-Software erstaml 20 Millisekunden warten
bevor sie mit dem eigentlichen Verbindungsversuch zum Bootloader
beginnt.
Steht in AppCmdResponse nichts drinnen so wartet die PC-Software
logischerweise nicht auf dieses sondern setzt bei der Warteschleife für
Timeouts.AppCmd fort. Ist dieses auf 0 so wird auch nicht gewartet.
Ich würde bei dieser Methode mit WDT in kürzester Periode arbeiten und
Timeouts.AppCmd=20 setzen um das Gesamttiming zu verbessern.
Statt in AppCmd mit einem kompletten Komando zu arbeiten könntest du
auch einfach zb. AppCmd=/55 setzen. Die Software sendet also den Wer
0x55 ab. Im 1-Wire Modus und ohne eigene UART Software an diesem Pin
würdest du den PinChange IRQ für diesen Pin benutzen. Innerhalb dessen
ISR schiebst du in ein Register die Daten rein und wenn dieses Register
eben 0x55 enthält, oder ähnliche Bitkombinationen, startest du den
Bootloader. So arbeite ich meistens noch mit der Erweiterung das ein
parallel laufender Timer diese Variable nach einer Zeit auf 0
zurücksetzt. Du kannst das natürlich erweitern wie du möchtest.
3.) sobald die PC-Software den COM Port öffnet und solange er geöffnet
ist wird die DTR Leitung der RS232 auf H Pegel gesetzt. Dies diente
primär als Mini-Stromversorgung für einen eventuell angeschlossenen
Pegelwandler, oder Pullup (max. erlaubte Ströme beachten). Auch diesen
Pin könntest du für diesen Zweck benutzen. Er ist aber nicht per
Konfiguration im Verhalten einstellbar.
Gruß Hagen
>Wenn das Programm läuft ist doch der Bootloader komplett ohne Funktion>oder?
Ja sicher, es läuft ja deine Anwendung. Ergo, wenn aus deiner Anwendung
heraus der Bootloader gestartet werden soll dann musst du auch in deiner
Anwendung den Bootloader-Pin überwachen und je nach obiger Methode
darauf reagieren.
Zusätzlich könntest du auch im AVRootloader.asm über die Einstellung
UseBootMode=? noch das Event festlegen bei dem der Bootloader
durchstarten soll. Zb. bei UseBootMode=3 würde der Bootloader nur
durchgestartet wenn entweder der WDT einen Reset ausgelösst hat oder der
AVR unprogrammiert ist, also noch keine Anwendung drauf ist oder der
Bootloader per direktem RJMP/JMP/CALL/RCALL gestartet wurde. Bei allen
anderen RESETs, wie Brownout, USB, JTAG, OnChipDebug, Ext. RESET,
Powerup würde der Bootloader sofort die installierte Anwendung starten.
Somit wartet der Bootloader dann nicht mehr und die Startupzeiten deiner
Anwendung beträgt diejenige die du über die Fuses eingstellt hast plus
par MCU Takte (ca. 16 Takte)
Aber Vorsicht, überlege dir dann genau den Programablauf. Wenn deine
Anwendung zb. den WDT deaktiviert und danach einen Programfehler hat,
zb. Endlosschleife dann wirst du den Bootloader nicht mehr starten
können und somit keine neue Anwendung über den Bootloader flashen
können. Denn der Bootloader reagiert ja nur auf einen WDT Reset oder
RJMP und beides trifft nicht mehr ein da deine derzeitig installiert
Anwendung einen Bug hat.
Gruß Hagen
Hallo Hagen!
Ich kämpfe gerade an zwei Fronten mit deinen Quellen ;-). Zum einen
machen die DEC Hash Funktionen in einer C++ Lib Probleme und ermittelt
mit jedem Start einen anderen Hash bei gleichen Ausgangswerten und
Konfigurationen und zum anderen mit deinem Bootloader. Zum zweiten mal
ein wenig ausführlicher:
Ich habe eine eigene Client Anwendung geschrieben, welche sich mit dem
AVR über ein eigenes Protokoll unterhält. Dieses enthält ein Reset über
den WDT um in deinen Bootloader zu kommen. Dieser hat 3 gesetzt, also
wartet er auch brav nach dem vom WDT ausgelösten Reset. Leider gibt es
Verzögerungen beim Schliessen des COM Ports in meinem Client,
instanziieren der Interface Klasse und anstossen des Verbindungsaufbaus
über dein Interface. Dadurch klappt das Update nur in max 1 von 40
Fällen. Von daher würde ich es gerne so umstellen, dass ich dein
Interface damit beauftrage anhand meines Protokolls den Reset auszulösen
und damit alles von dem Interface aus anstossen. Von daher wäre nun die
Frage: Die in 2. genannten INI Einstellungen, kann ich die auch bei
deinem Interface angeben? Wenn ja: wo?
Ansonsten wollte ich mal fragen, ob es möglich wäre das Interface vllt.
auf IStream oder ähnliches zu erweitern, so dass ich nicht gezwungen bin
die Firmware auf den Rechner abzulegen für die Übergabe an dein
Interface? Ich lade die Firmware in meinem Client runter bzw. der Client
bringt die letzte Firmware mit und somit würde ich die gerne "intern"
weitergeben ohne über externe (ausserhalb der App) Speicher zu gehen.
Und ansonsten nochmal dickes Lob an deine ganzen Projekte und Arbeiten:
die sind wirklich Klasse und von daher nochmals ein dickes Lob & Danke,
vor allem da du sie auch allen zur Verfügung stellst.
Hallo Hagen,
bitte entschuldige das ich so spät antworte.
(ich hatte das Verbindungsproblem)
Also ich habe jetzt in der PC-Software den Auto-Modus deaktiviert und
wie von dir empfohlen den COM-Port direkt angegeben.
Einstellungen komplett so wie von dir empfohlen - und es funktioniert
prima.
Wahrscheinlich gab es Timingprobleme des Rechner beim durchscannen der
Ports.(COM3:USB-Serial-Port)
Vielen Dank für deine Hilfe und die Zeit die du hier investierst.
Grüße
bandgap
@Andy F. meine Frage war eher rethorischer Art, also ein Hinweis für
dich das dort der Fehler nach meiner Meinung zu suchen ist. Solange der
Fehler kommt das er die Baudrate nicht einstellen kann (ein Fehler der
vom Treiber/OS kommt und nicht von meiner Software) wird meine Software
nicht in der lage sein den COM Port zu öffnen. Dh. es kommt im
Programablauf noch nichtmal zu den ersten Verbindungsaufbauschritten da
schon das Öffnen und Initialisieren des COM Port durch diesen Fehler
abgebrochen wird.
Sogesehen brauchen wir erst hier weiter machen wenn du dieses Problem
gelösst hast. Hast du schon mal in den Gerätemanager geschaut und
verifiziert das das System den COM Port auch als aktiv anzeigt ?
Gruß Hagen
@Robert,
>Wahrscheinlich gab es Timingprobleme des Rechner beim durchscannen der>Ports.(COM3:USB-Serial-Port)
das war eben auch meine Vermutung. Timingprobleme wird es immer geben,
genauer gesagt sind es Synchronisationsprobleme. Die Anforderungen sind
halt dergestalt das ein Kompromiß aus Baudrate, MCU Takt, Wartezeit im
Bootloader, Timing im HW-Kommunikationskanal, Verzögerungen in den
Treiber dieser Hardware, Timnings/Prioritäten im Tasksheduller des OS
und am Ende dieser Kette meine Software und das benutze Protokoll für
den Verbindungsaufbau. Sobald sich eine dieser Variablen ungünstig
verändert so entsteht der Fall das theoretisch ohne Probleme ein Connect
möglich wäre aber durch ungünstige sich überschneidende Intervale es
nicht zum richtigen Zeitpunkt zu einem Connect kommt. Es gibt nur eine
Antwort des Programmieres auf solche Probleme: entweder Umstellung auf
Ereignisbasierte Systeme, dh. wir lösen explizit und exakt ein Eregnis
aus das deterministisch exakt zu einer reproduzierbaren Reaktion führt:
in diesem Falle Bootoader startet, oder wie senden quasi mit Dauerfeuer
unseren Loginversuch bis der AVR antwortet. Letzeres ist aber unmöglich
wenn man eine ganze Reihe von COM Ports scannen möchte, da es dann eine
Frage der zeitlichen Dauer des Scannings wird. Naja, lange Rede kurze
Lösung: im AUTO Modus in der AVRootloader.ini bei solchen Problemen den
ConnectTrials Wert erhöhen, oder gleich die richtige Schnittstelle
auswählen.
Interesanterweise sind es immer die blöden USB-RS232, oder TCP/IP-RS232
Wandler die diese Probleme machen. Bei Benutzung der nach MS absolut
veralteten RS232 gehts bei mir immer ohne Probleme, egal welche
Baudrate, Konfiguration etc.pp.
Gruß Hagen
@Thomas:
vom Aufwand her und der Stabilität empfehle ich dir den RESET durch
meine PC-Software/DLL auslösen zu lassen. Die PC-Software lädt die
Einstellungen dazu aus der AVRootloader.ini Datei und übergibt sie dem
Interface als Parameter. Dh. für dich du kannst diese Parameter in
deiner Konfiguration speichern wie du es möchtest, lädst diese selber
und übergibts sie dem AVRootloader Objekt.
1.) dein Application Interface/Objekt alloziert bei OpenCOM() ein
Interface auf die Kommunikationsschnittstelle. Dieses Interface muß zb.
de Baudrate schon korrekt eingestellt bekommen haben durch deine
Anwendung. Gleiches gilt für die anderen Parameter dieser
Kommunikationsschnittstelle, eg. COM Port.
2.) bei den jeeiligen Aktionen die nun das AVRootloader Interface
ausführen soll fragt es bei deinem Application Interface die fehlenden
Parameter ab.
Siehe in AVRootIntf.pas die Dekalration von IApplication. Alle .GetXXX
Methoden sind exakt diese Abfrage Methoden von Parametern. Die findest
dort auch die Methoden .GetTimeouts um alle Timeouts aus der Sektion
[Timeouts] der INI Datei an den AVRootloader zurückzugeben, oder die
Methoden .GetAppCmd und .GetAppCmdResponse um die Kommandostring für
deine installierte Anwendung auf dem AVR um in den Botloader zu kommen,
abzufragen.
Der einzige Wermutstropfen bei der Sache ist die Festlegung auf eine
jeweilige Baudrate. Deine AVR Anwendung läuft mit einer vorgegebenen
Baudrate und diese muß auch für den Bootloader benutzt werden.
Ein Einbauen der IStream Schnittstelle halte ich für möglich aber im
Sinne von zeitlichen Aufwand in Relation zum Nutzen für mich und andere
für unökonomisch. Kurz gesagt: wenn dein Preis den du zahlst hoch genug
ist baue ich die den Bootloader so um das du damit zum Mond fliegen
kannst, aber das lohnt sich nicht. Statt einem IStream ist es ja jetzt
so das du eine HEX Datei zur Verfügung stellen musst ohne Änderungen am
jetzigen System. Damit geht die Verschlüsselung und alles andere.
Möchtest du dich nicht auf die schon fertige Umsetzung mit
AppCmd/AppCmdResponse und den RTS Geschichten verlassen dann besteht
durchaus auch die Möglichkeit das du über mein ICOM Interface, also
AVRootloader.COM: ICOM selber auf Lowlevel Ebene deine Daten für deine
AVR Anwendung sendest. Du hast alle Funktionen in ICOM die nötig sind um
über zb. die RS232 Daten zu senden und zu empfangen. Es spricht also
nichts dagegen das deine Applikation gemsicht mit AVRootoader über die
gleiche geöffnete ICOM Schnittstelle mit dem AVR kommunizieren.
Desweiteren enthält das AVRotloader Interface ein SubInterface mit Namen
.Command: ICommandSet. Dieses impelemtiert die
Bootloader-Protokoll-Kommandos. Auch diese kannst du benutzen um jedes
einzelene Bootloader Kommando auszuführen statt sich auf die HighLevel
Methoden wie .Program() .Erase() usw. verlassen zu müssen.
Und finally könntest du ein eigenes Kommunikationobjekt benutzen das nur
die ICOM Schnittstelle implementieren müsste. Somit kannst du quasi
deinen eigene Zwischenschicht bauen damit der AVRootloader zb. auf den
LPT oder andere Kommunikationshardware Zugriff bekommt. Bei
IApplication.OpenCommunication(): ICOM würdest du diese, deine
Implementierung der Schnittstelle zum neuen Gerät dem AVRootloader
mitteilen.
Defakto hast du also in AVRootIntf.pas alles was du benötigst um meine
PC-Software fast 1 zu 1 nachbauen zu können (fast:).
Die AppCmd/AppCmdresponse Geschichten habe ich hier im Thread erst vor
kurzem ausführlich beschrieben.
Gruß Hagen
Für all diejenigen die nicht den komplexen Weg über meine Interfaces und
die DLL gehen wollen oder können gibt es auch noch den Weg über mit
Übergabe von parametern an meine AVRootloader.exe das Program zu
steuern. Nachzulesen hier im Thread und in der AVRootloader.txt Datei.
Mit der Einschränkung der weniger flexiblen Einstellungsmöglichkeit kann
man über diese Paramater im Grunde auch alles machen.
Gruß Hagen
@ Hagen Re:
Ich hab' jetzt nicht den ganzen langen Thread durchforstet, daher frag'
ich dich einfach:
entweder habe ich Tomaten auf den Augen oder ich check's nicht, aber
dieselbe Einstellung wie auf dem Bild funktioniert auf mehreren mega644P
problemlos, '.inc' - File vom mega32 aktiviert (644 deaktiviert) läuft
nicht auf dem mega32 (16MHz) (siehe Protokoll). Benutzt wird RS232 mit
max232, µC und Verbindung ist OK.
Kannst du mir sagen was ich übersehen habe?
Was mir als erstes auffällt: Die BootCodeSize unterscheidet sich nicht
um 2 Bytes.
Diese sollte auf 0 gesetzt werden, dann erneut erstellen. Danach den
[used] Eintrag des Code Segmentes dort eintragen. Danach erneut
erstellen, dann sit der Eintrag unter [Used] zwar 2 Bytes grösser, aber
das sollte man ignorieren. Somit sollte es eigentlich eine Differenz
geben von 2 Bytes.
@Hagen: Das Update klappt nun alles, ich hatte einfach noch eine alte
Version und dadurch gab es die GetAppCmd, etc noch nicht in
IApplication. Dadurch kam es überhaupt zu der Frage. Wegen den DEC
Sachen mache ich einen Thread in der DP.net auf nächste Woche. Danke
nochmals!
Ich habe doch noch eine Frage: Ich habe nun das Versioning mit
eingeschaltet. Ich kann im AVR Code die App Version ermitteln, das
zeigst du ja in dem Beispielcode. Genauso über die Interfaces auf PC
Seite, aber ich habe noch nicht rausgefunden: wo wird die App Version
festgelegt und wo kann diese ändern? Muss ich in meinem "user Code"
einen bestimmten Offset mit einem uint32_t freihalten oder wird es im
BootLoader gespeichert? Wenn letzteres: wenn ich meine Update eigentlich
immer ohne BootLoader ausliefere, wie kann diesen dann aktualisieren?
Oder kann ich dies vom User Code aus im AVR?
Im AVR wird sie 4/6 bytes vor BootStart gespeichert, also im FLASH der
Anwendung logischer Weise und das in den letzten nutzbaren Bytes des
FLASHs. Man kann diese also auch mit einem hardcoded Addresszugiff in
der eigenen Anwednung auslesen (Adresse wird in der PC-Software bei den
Infos angezeigt). 4 Bytes vor Bootstart wenn der AVR eine eigene
Bootsection unterstützt, 6 bytes vor Bootstart wenn wir einen ATTiny oä.
ohne Bootsection benutzen. 6 Bytes weil ja noch der rjmp Main mit rein
muß. Die AppVersion wird also genauso wie bei den Tinys die Vektoren
durch die PC-Software beim Programmieren eines neuen HEX Files in dieses
HEX File live rein gepatcht. Man ändert die AppVersion also nicht auf
direkte Weise sondern beim flashen einer neuen Anwendung. Irgendwie auch
logsich da sich diese Version ja auf eine Anwendung, eh. Version eines
HEXs bezieht.
Sollten diese 4/6 Bytes im HEX File nicht alle auf 0xFF stehen gibt es
eine Fehlermeldung das die PC-Software nicht patchen konnte. Logisch da
sie davon ausgehen muß das diese Bytes dann von der Anwendung benutzt
werden und ergo die Anwendung zu groß für den zur Verfügung stehenden
FLASH ist.
Ist die Verschlüsselung aktiviert so gelten auch die 4 Checkboxen
welchen Teil der AppVersion der Bootloader überprüfen soll. Dh. eine
Überprüfung der aktuellen Version mit den Teilen der neuen Version und
ein eventuelles Unterbinden des Updates funktioniert nur mit der
Verschlüsselung. Auch das ist im Grunde logisch da nur so eine
kryptographische Sicherheit und damit unmanipulierbare
Versionsnummernprüfung überhaupt erst möglich ist. Also ohne
Verschlüsselung ist die AppVersion bei einem Update auf einen beliebigen
Wert einstellbar, mit Verschlüsselung überprüft der Bootloader erstmal
die Teile der neuen Version die man zur Prüfung per Checkboxen aktivert
hat. Diese müssen dann gleich oder höher der aktuell installierten
Version sein oder der AVR lässt kein Update zu.
In den Interfaces gibt es die Methode IApplication.GetAppVersion(Masked:
Bool): Integer. Diese Funktion sollte die neue Version als 4 Bytes
Integer zurück geben. Wenn Masked = TRUE ist dann die gleiche neue
Version aber diejenigen Bytes die nicht überprüft werden sollen müssen
auf 0xFF gesetzt werden. Dh. dann auch das jedes der 4 Bytes einen
Wertebereich von 0 bis 254 hat und der Wert 255 reserviert ist. SO
ähnlich arbeiten unsere IP Adressen.
Wenn also ein ACY File mit .DoCompile() oder .DoProgram() erzegt werden
soll so wird auch .GetAppVersion() zweimalig aufgerufen. Einmal
Masked=FALSE um das HEX File zu patchen und einmal Masked=TRUE um die zu
überprüfende Versionsnummer in den ersten verschlüsselten
Initialisierungdatenblock zu kodieren. Beide Versionsnumer, also die
schlußendliche im HEX File hineingepatchte und die teilweise zur
Überprüfung im Initialisierungblock sind verschlüsselt und können damit
im fertigen ACY File nicht manipuliert werden. Die aus dem
Initialisierungblock, der bei Verschlüsselung immer als erstes an den
AVR gesendet werden muß, wird nun mit der schon installierten überprüft.
Schlägt dies fehl akzeptiert der AVR keine weiteren Datenpackete und
unterbindet so das Programmieren des FLASHs. Hat ein Angreifer keinen
Zugriff auf die Register des AVRs so kann er nur noch per Brute Force
versuchen das 128 Bit Passwort zu knacken. Da dies aber weitaus weniger
wahrscheinlich zum Erfolg führt als den AVR als Hardware, also seine
Fuses/Die anzugreifen, ist dies relativ sehr sicher. Mehr ist
kryptographisch als Schutz nicht rauszuholen aus den AVRs, in Software.
Dieses Initialisierungpacket ist 16 oder 24 Bytes groß. 24 Bytes wenn
UseVersionng aktiviert. Die ersten 8 Bytes sind reine Zufallsbytes und
randomisieren somit wie ein Initvector die komplette Verschlüsselung auf
Grund der Verknüpfung aller Datenblöcke des HEX File über ein
Feedbackregister intern. Dh. wird das gleiche HEX File mit gleichen
Enistellungen (Passwort etc.pp) merhmals verschlüsselt so wird der
Output sich immer komplett unterscheiden. Dieser zufällige IV stellt
also sicher das eine ganze Reihe von kryptologischen Angriffen effektiv
unterbunden werden, zb. Austausch von verschlüsselten Datenblocken,
Manipulation einzelner Bits im Datenblock, Choosen Plain Text Angriffe
um das Passwort in Erfahrung zu bringen, Differentielle Krypoanalyse
usw. usf.
In den letzten 8 Bytes dieses Initialisierungsblockes stehen 4 Bytes die
aktuelle Versionsnummer des Bootloaders, der AVR Typ also alles was bei
BootInfo steht. An hand dieser Werte überprüft die Entschlüsselung ob
die nachfolgenden Daten exakt für diesen Bootloader und AVR bestimmt
sind. Die letzten 4 Bytes sinde eine Signatur die identisch zu den
ersten 4 Bytes des gewählten Passwortes sein müssen, nach der
Entschlüsselung. Somit eine geheime Signatur mit unbekannten und nicht
festen Inhalt da sie vom Passwort direkt abhängig ist und gleichermaßen
eine 32 Bit Prüfsumme. Da der XTEA Algorithmus eine 64 Bit breite
Blockverschlüsselung ist heist die das sie in meinem
Doppel-CBC-Feedback-Modus wie eine 64 Bit sichere Prüfsummenfunktion
arbeitet. Die Daten, also alle Datenblöcke einer Datenübertragung sind
am Ende mit einem solchen 8 Bytes Zusatzdatenblockes abgesichert. Ergo
benutzt die Verschlüsselung eine Prüfsumme vergleichbar zu einer 64 Bit
breiten CRC die mit einer Wahrscheinlichkeit von 32Bit sicher ene
Aussage treffen kann ob die vorherigen Daten korrekt und unmanipuliert
übertragen wurden. Bei den Datenpacketen zur Programmierung des FLASH
steht statt der 4 Bytes BootInfo in diesem Datenblock dann eine 24 Bit
Adresse drinnen. Das ist diejenige FLASH/EEPROM Adresse an den die
vorher empfangenen Daten, und die im SRAM Buffer entschlüsselt worden
sind, programmiert werden sollen. Dh. auch die Addressinformation wird
durch das kryptographische Protokoll geschützt und nicht manipulierbar
gesichert. Es hat den Vorteil das man Datenblöcke mit sich
wiederholbaren Muster nur einmal übertragen kann und in den eigentlichen
FLASH/EEPROM Programmierroutinen mehrmals linear hintereinander ab einer
Startadresse programmieren kann. Möchte man zb. 512 Bytes mit dem Inhalt
0x01 0x02 programmieren so überträgt man effektiv nur 2 Bytes, nämlich
0x01 und 0x02, plus die 3 Bytes Startadresse. Dann ruft man die
Programmfunktion für den EEPROM/FLASH einmalig auf und teilt ihr mit das
sie 256 mal diese 2 Bytes ab der Addresse programmieren soll. Teilweise
wird dieses Feature auch schon in der PC-Software benutzt, als Art
Komprimierung und Beschleunigung der Datenübertragung.
Mit IAVRootloader.Device.AppVersion: Integer, fragt man vom aktuell
verbundenen bzw. zu letzt verbundenem AVR die Versionsnummer ab. Ist
diese 0xFFFFFFFF und .Device.Supports & sfVersioning <> 0 dann wurde im
AVR noch nichts installiert.
Soweit zur Versonsnummer, der Verschlüsselung, wie und warum es so
funktioniert.
Gruß Hagen
Übrigens, die oben beschriebene Art der Versionsüberprüfung kann auch
angewendet werden wenn man nur den EEPROM per sicheren ACY updaten
möchte. Dh. ein kompiliertes und verschlüsseltes ACY File das nur EEPROM
Daten enhält kann über die Versionsprüfung auf einen AVR serialisiert
werden. Nur AVR mit der gleichen oder geringeren Versionsnummer der
Anwednung akzeptieren dann diese neuen EEPROM Daten. Das war auch einer
der Gründe es so zu machen wie es jetzt ist.
Ach und nochwas: das interne Feedback Register wird innerhalb der
merhfachen Übertragung verschiedener nachfolgender Datenpackte nicht
zurückgesetzt. Dh. auch wenn die PC-Software unser HEX File in kleinere
Packate a maximal SRAM Buffer der zur Verfügng steht zerlegt und dabei
jeden mit einem 8 Bytes Prüfsummenblock absichert, so besteht für einen
Angreifer keine Möglichkeit durch Austauschen dieser
Kommunikationsbedingten Zerlegung die Packete auszutauschen oder um zu
sortieren. Dh. sie müssen damit sie korrekt entschlüsselbar sind in der
exakten Reihenfolge gesendet werden.
Gruß Hagen
Hagen Re schrieb:
> @Thilo, folge mal Thomas seiner Vermutung, das ist auch meine.>> Gruß Hagen
Habe ich getestet. Keine Änderung.
Auch ein vorsichtshalber neuer µC brachte keine Änderung.
Wie gesagt: Austausch gegen einen m644P, Codegröße und .inc angepasst,
funktioniert. Mega32 nicht.
@Thilo:
mein Auftraggeber sagt immer: mache nicht deine Probleme zu meinen ;)
Du musst irgendwo einen Fehler gemacht haben. Gehe also alles nochmal
wie hier irgendwo im Thread beschrieben step by step durch.
Letztens erst trat der Fall auf das die RX/TX Pin/Port Einstellungen
nicht mit den benutzen Pins übereinstimte, hast du das überprüft ? Fuses
richtig ? Korrektes Include ? Mal in AVRootloader.ini [Timeouts] Options
= 2 gesetzt und den Inhalt des Protokollfensters hier gepostet, nach
einem Verbindungsversuch ?
Arbeitest du mit internem RC Oszillator oder externen Quarz ? Wenn
extern schwingt dieser ? Fuses richtig ?
Gruß Hagen
>mein Auftraggeber sagt immer: mache nicht deine Probleme zu meinen ;)
Hast ja Recht ... ;)
Ich kann's mir eben nicht erklären.
Ich nehme den m32 aus der Schaltung, stecke den m644 'rein, .inc und
Codegröße angepasst, sonst alles gleich => läuft problemlos.
Protokollfenster, Einstellungen und Fuses habe ich weiter oben als .jpeg
gepostet.
Danke für die Mühe! ;)
Edit: ich werde mal die Schaltung auf m644P aufrüsten.
Jetz habe ich das erstmal gesehen ! Der Output ist also von deinem M32.
Er programmiert deinen M32 bricht dann aber beim Verify mit einem
Lesefehler, eg. Timeout ab. Ändere mal in AVRootloader.ini [Timeouts]
Buffer= auf einen höheren Wert ab.
Dh. im Grunde läuft bei dir alles korrekt bis einschließlich Connect.
Dann gibts einen Timeout Fehler der nicht auftreten sollte.
Setze mal [Timeouts] Options=2 und dann nochmal das Protokoll hier
posten. Diese Option aktiviert den Debugmodus aus dem ich dann im
Protokoll mehr heraus lesen kann.
Gruß Hagen
Hallo Hagen!
Das Problem mit dem Verify Timeout hatte ich auch, ich habe aber nun
einfach das Verify abgeschaltet und mache dies nun auch nicht mehr. Aber
ich habe noch ein Problem und zwei Fragen:
1. DoConnect() hat einen Working Parameter - was bedeutet dieser? Du
bist in dem Thread nicht darauf eingegangen und hast ihn in deinen
Beispielen mal auf true gesetzt und mal auf den default (false).
2. ProcessMessages hat nun ja einen boolschen Rückgabewert. Wenn ich das
richtig sehe, dann kann ich dort true zurück geben um die aktuelle
Aktion abzubrechen und false wenn alles wie gehabt weiter werkeln soll.
Richtig?
3. Ich habe noch das Problem, dass er mir beim DoConnect() eine
Exception aus deiner DLL wirft ohne Message (ist leer). Diese wird
danach auch über Output gemeldet mit dem Code für einen Fehler
(ocError), aber weiterhin ist Msg leer. Danach ruft die DLL wieder
OpenCommunication auf, was dann natürlich schief geht, da der Port schon
noch von dir geöffnet ist (Access Denied, Code 5 von Windows zum
CreateFile() des COM Ports). Und dies dreht sich dann endlos, angefangen
mit der Exception aus DoConnect ohne Message.
Mit jedem Versuch setzt die DLL trotzdem erfolgreich mein App Command ab
zum resetieren des AVR, was dieser auch richtig macht - also irgendwer
in deiner DLL weiss noch um den offenen COM Port ;-).
Das Programm von dir macht es ohne Probleme, aber braucht mehrere
Anläufe zum absetzen des App Commands, vllt. gibt es intern auch diese
Probleme?
Alle o.g. Probleme treten nicht auf, wenn ich mich direkt verbinde und
Update, also ohne App Command, was z.b. direkt nach brennen des
Bootloaders der Fall ist.
Und eine letzte Frage, rein informativ: woher unterscheidest du bei der
AppCommand Funktion ob ich die Daten die du senden musst nun 2 Byte oder
1 Byte pro Zeichen sind?
Nachtrag: Wenn ich, wie von dir öfters beschrieben, in deinem Programm
die Options auf 2 setze, dann schafft er es nicht mehr, sich zu
verbinden. Die RxD Leitund des MC flasht die ganze Zeit, er selber
resetet auch ordentlich (AppCommand klappt) und bleibt im BootLoader,
aber er bekommt keine Verbindung zu stande. Bei Options=0 schafft er es,
er flasht vllt. erstmal eine Minute rum mit der RxD, aber er schafft
dann aber eine Kommunikation aufzubauen.
Ich kann bei Interesse dir auch alles mal zippen, von der Config deines
Progs, bis zu meiner Software, Client etc. Zum selbst ausprobieren
sollte ein beliebiger (bei mir ATMega 8) AVR 8 Bit reichen mit serieller
Verbindung.
Ok, Fehler zu erst:
Option=1 um den Debug Modus zu aktivieren
Option=2 um den alten Connect zu aktivieren
Option=3 für beides.
@Thilo: also Option auf 1 setzen und nicht 2. Da bin ich durcheinander
gekommen.
Der alte Connect bis Version 4 glaube ich, benutzt nach dem Senden des
BootSign keine 16 Bit CRC über diese BootSign. Beim neuen Connect, also
diese Option nicht gesetzt, wird über die BootSign noch eine CRC
berechnet und gesendet. Der neue Bootloader erwartet also diese CRC und
akzeptiert nur mit gültiger CRC einen Connect Versuch. Der alte
Bootloader kann auch mit dem neuen Verfahren zurecht kommen, wird aber
in der nachfolgenden Command FSM am Anfang aus dem Tritt geraten. Wenn
man also mit der neusten PC-Software eine Verbindung zu einem älteren
Bootloader machen möchte dann empfehle ich diese Option auf 2 zu setzen.
Unter Umständen geht das aber auch ohne diese Option.
@Thomas: sieht so aus als ob dein RS232 Timing sehr ungünstig ist, neben
den anderen oben besprochenen Dingen.
>1. DoConnect() hat einen Working Parameter - was bedeutet dieser?
Es gibt zwei Grundmodis, moConnected und moWorking. moConnected heist
einfach manuell verbunden und muß auch manuell mit DoDisconnect()
getrennt werden. Der Unterschied zwischen moConnected und moWorkng liegt
in deiner Callback Methode IApplication.Changed begründet. Ist
IAVRootloader.Mode = moConected dann solltest du andere Bedienelemente
enablen als im moWorking Modus. Als Beispiel hättest du einen Program
Button der in der Callback Methode .Changed disabled werden sollte wenn
der .Mode auf moWorking steht.
Mit dem Bool Parameter in .DoConnect() teilst du also im Vorhinein mit
ob du nur eine Verbindung aufbauen möchtest oder ob du eine Verbindung
aufbauen möchtest und gleich danach irgendeine Aktion durchführen
möchtest, also DoProgram() usw.
.DoConnect() und .DoDisconnect() Aufrufe können verschachtelt sein, als
2 DoConnect()s benötigen 2 DoDisconnect()s. Wird eine Methode wie
.DoProgram() aufgerufen ohne vorher connected zu sein so wird intern
autom. DoConnect() aufgerufen und nach Beendigung DoDisconnect().
>2. ProcessMessages hat nun ja einen boolschen Rückgabewert.
Korrekt. Alle deine Aufrufe von Methoden der Interfaces sollten zu
äußerst mit einem try except Schutzblock gekapselt sein. Wird in
.ProcessMessages TRUE zurück gegeben dann wird intern eine EAbort
Exception ausgelösst auf die du dann in deinem äußersten Schutzblock
reagieren solltest. Exception sind Außnahmebedingungen und die meisten
Programmierer verstehen ihr Konzept gründlich falsch. Es ist keine reine
Fehlerbehandlung sondern eben Ausnahme Bedingungen und was als Ausnahme
gilt ist reine Definitionssache. Sogesehen benutze ich die Exceptions
nicht nur als Fehlermeldungen sondern bewusst auch zur sauberen
Terminierung von Aktionen. Zb. eben das Abbrechen einer Aktion durch den
Benutzer. Das funktioniert solange gut wie man als programmeirer die zu
äußerst liegenden Codeblöcke auch mit try except Schutzblöcken sichert.
>3. Ich habe noch das Problem, dass er mir beim DoConnect() eine>Exception aus deiner DLL wirft ohne Message (ist leer).
Die .OpenCommunication() Methode hat einen Parameter Index.
.OpenCommuication() wird bei einem Connect Versuch in .DoConnect() quasi
als Callback aufgerufen. IAVRootloader ruft .OpenCommunication() mit dem
Index beginnend bei 0 auf. Kehrt .OpenCommunication() mit nil zu
IAVRootloder zurück bricht dieser den Connect Versuch ab. Bricht
.OpenComunication() mit einer Exception EAbort ab so wird IAVRootloader
den Index um +1 inkrementeren und wider .OpenCommunication() nun mit
Index =1 aufrufen. Somit kann über .OpenCommunication() eine nicht so
ganz offensichtliche "Schleife" aufgebaut werden und der ansich für dich
nicht frei zugreifbare Connect im IAVRootloader gesteuert werden.
Letzendlich dient es dazu im AUTO Modus, einem Scan der COM Ports, alle
COM Ports der Reihe nach ihrem Index durch zu iterieren bis ein gültiger
Connect zustande kommt. Dieses Vorgehen habe ich nachträglich als
Feature implementiert und deshalb die nicht ganz so offensichtliche
Arbeitsweise. Hier mal mein Sourcecode der .OpenCommuniation() Methode
in meiner PC-Software
Es ist ja so das das IAVRootloader Interface keinerlei Zugriff auf den
eigentlichen COM Port über das ICOM Interface bekommt. IAVRootloader
kann nur lesen und schreiben in dieses Interface/Port aber eben nicht
festlegen welchen Port, welche Hardware oder Einstellungen möglich sind.
Diese Aufgaben sind dem eigenen IApplication Interface vorbehalten. Dies
ist eine restriktive Form der Softwareprogrammierung, die konsequente
Modularisierung, Aufgabenteilung und Protektisierung um unabsichtliche
logische Fehler durch den Programmierer zu verhindern. Leider führt dies
dazu das manchesmal, wenn zu regide angewendet, das spätere
konzeptionelle Richtungsänderungen schwerer ohne größere Änderungen
umsetzbar sind.
Gruß Hagen
>Ich kann bei Interesse dir auch alles mal zippen, von der Config deines>Progs, bis zu meiner Software, Client etc. Zum selbst ausprobieren>sollte ein beliebiger (bei mir ATMega 8) AVR 8 Bit reichen mit serieller>Verbindung.
Danke für dieses nette Angebot, und ich wäre wirklich interessiert wenn
da nicht das Zeitproblem ist. Im Grunde habe ich ja selber schon alles
mal verwendet und weiß also wie es funktioniert ;-) Wenn du sichergehen
möchtest das ich mal über deine Arbeit drüber schaue um dir
Verbesserungen vorschlagen zu können dann würde ich das natürlich auch
machen.
>Und eine letzte Frage, rein informativ: woher unterscheidest du bei der>AppCommand Funktion ob ich die Daten die du senden musst nun 2 Byte oder>1 Byte pro Zeichen sind?
Diese Frage habe ich nicht ganz verstanden. In AppCmd/AppCmdResponse
wird ein String drinnen stehen der minimal 1 Zeichen bis zu x Zeichen
lang sein kann. Die Escaped Sequenzen also 3 Zeichen ala /3F werden
umgewandelt und raus kommt der fertige String der gesendet eg. empfangen
werden muß. Nun, IAVRootloader sendet AppCmd und wartet auf den Empfang
des AppCmdResponse. Dessen Länge in Bytes ist ja dann schon bekannt und
somit ist es einfach diese X Zeichen vom COM Port zu lesen und mit
AppCmdResponse zu vergleichen. Real ist es natürlich ein bischen anders
da ich dort Zeichenweise beginnend mit dem ersten Zeichen des gültigen
AppCmdResponse vergleiche und einen Zeichen-Index bei Erfolg
inkrementiere. Dh. sowas wie eine sliding Window Vergleichsroutine.
Hm, könnte es sein das du dich auf die Deklaration mit WideString
beziehst und die Unterscheidung zwischen Singlebyte/Multibytes String
meinst ? Ganz einfach: alle WideStrings werden als nicht translierbare
Singlebyte Strings interpretiert. 2 Bytes ASCII Formatirungen also
garnicht berücksichtigt.
Der Grund für die Verwendung von WideStrings ist einfach der das nur
dieser Typ für dynamische Strings über Prozess/Thread/Task-grenzen
hinweg im MS DCOM/COM/AQctiveX Standard erlaubt, eg. sinnvoll sind.
Würde ich meine DLL also in ein echtes ActiveX/COM Objekt umbauen wollen
so müsste ich nichts am bestehenden Code abändern aus dem Fakt der
dynamischen Allozierung. Dann wäre diese DLL als Inprozess/Outprocess
COM Server sofort benutzbar als ActiveX/COM Objekt in anderen Sprachen
die sich an die Regeln halten. Die Alternative zu Widestrings als
"binärer dynaqmsicher Datenkontainer" wären andere Interfaces/Objekte zu
benutzen, wie IStreams usw. Das ist aber viel komplizierter als mit
WideStrings zu arbeiten. Neuerdings gäbe es noch die Varianten aber in
diese ein Bytesarray zu allozieren kostet im Source mehr als eine simple
Zuweisung wie bei den WideStrings in Delphi. WideString sind in Delphi
kompatibel zu deren eigenen AnsiStrings.
Gruß Hagen
Hallo Hagen!
Danke für die Erklärungen, nun bin ich ganz gut informiert und vieles
ist nun auch sehr gut verständlich. Ich hatte bei der DoConnect
Exception mich schon recht gut gewundert, wie eine DLL mir eine Delphi
kompatible Exception werfen kann, da afaik Delphi dies nicht ordentlich
handelt mit externen Exceptions. Wäre es eine EAbort Exception, dann
hätte man ja vllt. wenigstens den Classname ermitteln können, aber die
gefangene ist einfach Exception, von daher kann es von Delphi vllt. eine
neu generierte sein nach auffangen der von dir generierten.
Ich werde zumindest demnächst nochmal weiter debuggen und schauen woher
das ganze stammt, es wäre doch wohl gelacht, wenn ich das nicht zum
stabilen laufen bekommen würde.
Ich kenne das mit der fehlenden Zeit selbst ganz gut, aber derzeit kann
ich mich mal gut dem Projekt widmen - da es ein privates Projekt ist,
ist das eine schöne Urlaubsbeschäftigung. Ich würde dich nur im Notfall
bitten dir den Quellcode anzuschauen - ein Notfall wäre, wenn ich nach 3
Tagen debuggen noch immer keinen Anhaltspunkt habe, warum das nicht
klappt oder die Exception mir weiter um die Ohren fliegt. Das Angebot
war eher dazu gedacht, dass du die Fehler besser nachvollziehen kannst,
da ich mit dem Verify das gleiche Problem hatte und dazu noch halt diese
Exception + hackliger Verbindungsaufbau mit deinem Programm. Aber
erstmal stehle ich dir ja schon genug Zeit mit den Beiträgen hier.
Und zu der AppCommand Frage, diese zielte eher darauf ab, da du ja einen
WideString haben willst. Dies ist zwar durch das ActiveX beste Wahl,
aber wenn ich dir nun einen zurück gebe, z.B. "test", dann wäre es im
Speicher folgender aufbau: 00 74 00 65 00 73 00 74. Woher weisst du nun,
dass du nur 74 65 73 74 senden musst und ich nicht vllt. Binärdaten
nutze in meinem Protokoll und du von daher 00 74 00 65 00 73 00 74
versenden müsstest?
Grüße,
Thomas
Ok, ganz einfach würdest du mit WideString die Bytes 00 74 00 65 00 73
00 74 versenden wollen dann stünde im WideString folgendes drinnen
00 00 00 74 00 00 00 65 00 00 00 73 00 00 00 74, expandiere also jedes
der Bytes um ein weiteres Nullbyte. Per see wandle ich alle WideString
Parameter von und nach ANSI Strings. Ich benutze also intern selber nur
die LongStrings/eg. AnsiStrings vom Delphi. WideString dient nur dazu um
in den Interfaces CMO/ActiveX konform zu sein und eben nicht die
aufwändigeren Alternativen nutzen zu müssen.
Beim Debuggung mit Delphi musst du aufpassen. Der JIT Debugger von
Borland zeigt dir auch abgefangende Exception an und hält auch dann.
Diese Exception könntest du leicht als Exception für dich interpretieren
werden aber intern in jedem Falle behandelt und interessieren dich somit
überhaupt nicht. Das liegt darin begründet das der Debugger zwar sich in
die globale Exceptionchain einlinken kann er aber eben nicht zum
Zeitpunkt des Auslösens einer Exceptions in der Lage ist zu ermitteln
bis zu welchem übergeordneten Sourcecode Bereich die Nicht Bearbeitung
dieser Exception reicht. Normalerweise bist du als Programmierer nur an
denjenigen Exceptions interessiert die bis in deinen Source hinein
unbearbeitet bleiben und dort abgefangen und behandelt werden sollten.
Zum Auslösezeitpunkt einer Exception könnte es aber so sein das in
meinem Source ich später diese Exception abfange, sie behandle und eine
andere neue Exception als Folge davon raise. Möchte man aber nun einen
Haltpunkt an exakt der Codestelle an der eine Exception ausgelösst wurde
dann kann zu diesem Zeitpunkt der Debugger eben nicht wissen das es sich
um eine Exception handelt die garnicht bis in deinen Source hinein
reichen wird da ich sie in meinem Source vollständig behandle.
Exceptions sind heutzutage ein Feature des Windows Betriebsystemes, mit
klar definierter Struktur und einigen hilfreichen API Funktionen.
Borland Delphi kannte noch vor dem Windows OS Exceptions, diese wurden
aber ganz anders umgesetzt. Egal, worauf ich hinaus will ist das Fakt
das der Borland Debugger auch andere Programme geschrieben in anderen
Sprachen und deren Exception Handling debuggen kann, solange sie sich am
MS Window Standard halten. In diesem Falle, und eben bei
Interprozess-Debugsessions stehen aber bestimmte Infos nicht mehr zur
Verfügung. Also zb. der Klassennamen der Objektimplementierung einer
Delphi Exception, selbst wenn sie in einer DLL mit Delphi geschrieben
ausgelösst wird. Das liegt einfach daran das die Delphi Exception
Klassen eben ein Feature nur von Delphi sind und nicht kompatible
Objektstrukturen zu anderen Sprachen, es gibt da ja keine Standards. Der
debugger kann die also anzeigen wo und das eine Exception ausglösst
wurde im Sinn der Funktionalität die das OS/Hardware zur Verfügung
stellt aber eben keine Informationen über den OOP Überbau den ein Source
benutzt um diese Exception in Objekte zu verkapseln.
Nebenbei bemerkt hätte der Delphidebugger sehr wohl die Möglichkeit auch
den Klassennamen von Exceptions aus anderen Prozessen/DLLs die selber
mit Delphi geschrieben wurden zu ermitteln und anzuzeigen. Die Windows
OS Exception Strukturen können nämlich durchaus erweiteret werden,
werden sie sogar, nämlich um zb. Zeiger auf die Exception Objekte, und
damit die OOP-mäßige Kapselung dieser Exceptions. Nur kommt man da an
die Grenze zwischen planmäßiger definierter Benutuung einer
Schnittstelle und einem Hack zum Auslesen anderer Prozessspeicher.
Sogesehen: die Aussage Delphi/Debugger würde dies nicht richtig
handhaben ist falsch ;) Er darf es gar nicht anders handhaben auch wenn
es möglich wäre, es existiert keine klar umrissene Schnittstelle solche
Informationen über Prozessgrenzen und Sprachgrenzen hinweg abfragen zu
können.
Gruß Hagen
Übrigens Exceptions dürfen auch in COM/ActiveX Interfaces über die
Grenzen der DLL/Prozesses/Tasks usw. weitergereicht werden. Man sollte
dies nicht machen aber zulässig ist es. Deshalb oft bei den COM/ActiveX
die umständliche alte Arbeitsweise über ein HRESULT als Rückgabe einer
Methode.
Die Punkte an denen manchesmal der JIT Debugger mit "externe Exception"
aussteigt sind von ganz spezieller Natur. Meistens sind es nämlich
Exception innerhalb des Kernels vom Windows ausgelösst um spezielle
Tricks zu ermöglichen. Exceptions sind nämlich hervorragende Mittel um
Hacking/Debugging zu erschweren. Nun, diese "seltene" Fälle in denen der
JIT Debugger aussteigt liegen darin begründet das diese Exception sich
eben nicht an den Standard in der Exceptionbehandlung halten den MS
vorgegeben hat.
Man kann also einen Debugger der selber ein Exceptionhandling benutz
dahin gehend austricksen das man in seinem eigenen Code dessen
Excpetionchain so umbiegt das eine Exception ausgelöst im eigenen Code
sich so verhält als wäre sie innerhalb des Debuggercodes ausgelösst. Das
führt dazu das der eigene Code die Kontrolle über den Debugger erlangen
kann und diese abschießt. Aber das ist Hardcore und sprengt diesen
Thread ;)
Gruß Hagen
Hallo Hagen!
Jo, danke. Manches davon war mir noch nicht bewusst - ich habe bisher
auch meistens immer beide Seiten programmiert bei irgendwelchen
Interfaces oder anderen Schnittstellen, so dass ich dort meistens mit
results gearbeitet hatte.
Ich meinte bei meinen Ausführungen nicht EExternalException sondern
bezog mich mit "externe Exception" auf Exceptions aus nicht meinem
Programmcode - somit u.a. aus deiner Interface DLL.
Ich werde mal debuggen und schauen. Wenn es Problem gibt, dann melde ich
mich nochmals.
Vielen Dank nochmals für deine Zeit und wie immer ausführlichen
Erklärungen!
Gruss,
Thomas
>Ich meinte bei meinen Ausführungen nicht EExternalException sondern>bezog mich mit "externe Exception" auf Exceptions aus nicht meinem>Programmcode - somit u.a. aus deiner Interface DLL.
Und eben diese siehst auch du in deinem Debugger. Ich empfinde diese
ebenfalls störend in der produktiven Entwicklung, aber aus oben
genannten Gründen kann der Debugger dies nicht unterscheiden. Naja,
möglich wäre es schon aber Borland hat keine GUI Schnittstelle
integriert um dies selektiv abzuschalten. Wahrscheinlich weil sie es
nicht sauber überprüfen können obwohl es doch sehr einfach wäre das
Modulhandle und damit die virtuelle Adresse des Modules in der die
Exception ausgelöst wird als Filterbedingung zu benutzen. Problematisch
bei einem solchen Filter ist eben der Fakt der realen Behandlng einer
solchen Exception. Wird sie im fremden Modul vollständig behandelt
bräuchtest du sie auch nicht sehen. Passiert dies nicht und du stepst
nicht durch dann landest du in deinem Source an einer Stelle die du dir
nicht erklären kannst wie du dahin gekommen bist. Aus deiner Sicht ist
die Kausalität nicht mehr vorhanden und ergo suchst du in deinem Code
bis in alle Ewigkeit nach dem Auslöser dieses Verhaltens. Borland hat da
wohl pragmatisch reagiert und zeigt alle Exceptions an weil sie
eventuell direkt in deinen Code springen könnten und baute somit auch
keine Filterung für solche Exceptions ein.
Das was du nun als Exception bekommst sind meine internen EAbort's die
ich zur Flußsteuerung benutze. Diese werden behandelt und wie ich es
oben schon sagte sehe ich Exception bischen weiter gefasst als nur pure
Fehlerbehandlungen.
Gruß Hagen
Hallo Hagen!
Zwischenzeitlich kann ich erfreuliches berichten: es läuft. Ich hatte
diese Verbindungsprobleme aus dem gleichen Grund wie dein Programm:
Options war noch 2 und nicht halt 1. Nun mit der neuen Connect Methode
von dir (also Options 0 oder 1) klappt nun auch alles wieder vorzüglich.
Ich war auch schon recht verwundert, da ich zuvor ein paar Updates ohne
Probleme fahren konnte. Die Exception war somit einfach nur die Meldung
über den ausgebliebenen Verbindungsaufbau. Komisch bleibt aber weiterhin
warum deine Output() Funktion anspringt mit einer leeren Message und dem
Code für einen Fehler. Du stellst doch den ausbleibenden
Verbindungsaufbau fest (Timeout), somit bist du doch Herr bzw. Generator
der Meldung. Alle meine weiteren Probleme die ich vorhin geschildert
hatte waren nur Folgefehler (Index war dann 2, erneuter Aufbau, anderer
Port/Enumeration, dadurch dann Code 5, Access denied - nun ist dies
alles klar).
Also, ergo, alles in Butter und derzeit läuft das Update schonmal
grundsätzlich. Nun bleibt nur noch die Frage, warum meine AppVersion
immer so komisch aussieht, obwohl ich doch alles gesetzt habe und auch
mein klein genug ist (noch rund 2,5 kB frei, 1 kB für Bootloader, also
1,5 kB frei). Deine App und das Interface ermitteln die App Version
korrekt, nur die von deinem test Beispiel übernommene Code ermittelt
wohl Müll. Auch der gesicherte MCUSR ist müllig. Aber das sind
Kleinigkeiten, die löse ich noch mit der Zeit.
/Nachtrag: Sprich ermitteln der AppVersion auf dem AVR mit dem Client
Code schlägt fehl. Special Read ist an, sonst würde er ja ins Nirvana
springen (war mein vorheriger Fehler ^^).
Das ganze Projekt wird eh wieder komplett veröffentlicht, es ist "nur"
ein Update des bisherigen Projektes
(http://blog.mütze1.de/?page_id=231).
Also nochmals vielen Dank für deine Hilfe. Und ich werde mich ranhalten
Beispielprojekte für das DEC Problem zu erstellen.
Grüsse,
Thomas
PS: Ich nutze in meinen Programmen auch zu gerne SEH, weil es im OO
programmieren einfach die beste Möglichkeit ist um den Programmablauf
ausserhalb der Reihe zu steuern. Gerade Aktionsabbruch etc.,
Fehlerbehandlung, Flusssteuerung, etc.
>..Probleme fahren konnte. Die Exception war somit einfach nur die Meldung>über den ausgebliebenen Verbindungsaufbau. Komisch bleibt aber weiterhin>warum deine Output() Funktion anspringt mit einer leeren Message und dem>Code für einen Fehler. Du stellst doch den ausbleibenden>Verbindungsaufbau fest (Timeout), somit bist du doch Herr bzw. Generator>der Meldung...
Korrekt, ich bin auch der Herr und Generator der Fehler die immer in
einem solchen Projekt versteckt sind ;) Kurz, es könnte durchaus auch
ein fehlerhaftes Verhalten sein auf das ich in meinem Überbau nicht
stoßen konnte weil er sich von deiner Benutzung der Interfaces
unterscheidet. Um dies beurteilen zu können und eventuell einen Hinweis
auf meinen Fehler zu bekommen wäre es vieleicht doch sinnvoll wenn ich
mir deine Sourcen anschaue.
> Nun bleibt nur noch die Frage, warum meine AppVersion>immer so komisch aussieht, obwohl ich doch alles gesetzt habe und auch>mein klein genug ist (noch rund 2,5 kB frei, 1 kB für Bootloader, also>1,5 kB frei). Deine App und das Interface ermitteln die App Version>korrekt, nur die von deinem test Beispiel übernommene Code ermittelt>wohl Müll. Auch der gesicherte MCUSR ist müllig. Aber das sind>Kleinigkeiten, die löse ich noch mit der Zeit.
Das gesicherte MCUSR muß unter WinAVR GCC exakt so geholt werden wie ich
es gezeigt habe (könnte vielleicht auch von der WinAVR Version abhängig
sein). In meinem Example benutze ich absichtlich die Zuordnung der
einzelnen Funktion zu bestimmten Sections für den Linker. Damit stelle
ich sicher das die Initialisierung durch den WinAVR Startup Code
teilweise schon erfolgte aber der Stack noch nicht benutzt wurde. Das
gesicherte MCUSR liegt ja an der ersten Speicherstelle im Stack. Hast du
vor dem Auslesen nach meinem Vorschlag aber schon zb. eine
Unterfunktion, also CALL, getätig ist dieser Inhalt nun mit der
Rücksprungadresse überschrieben worden. Es ist halt nicht so einfach
eine Methode zu wählen die einfach, schnell und Resurcenschonend
funtioniert und dann noch keine Kollisionen mit zb. dem WinAVR Startup
Code provoziert.
Natürlich mus auch UseSaveMCUSR=1 gesetzt sein.
Wie gesagt so wie es in meinem Example demonstriert wurde, exakt so,
sollte es auch immer funktionieren.
Und als Letztes könnte es auch der Fall sein das du schon den korrekten
Inhalt des MCUSR siehst nur dieser für dich komisch aussieht. Einige
AVRs speichern noch andere Bits in dieses Register, oder bei einem
Powerup hast du gleich 3 Bits gesetzt, die für PowerUp, Ext. Reset und
Brownout. Das war mir bis vor kurzem (bei der Entwicklung des
Bootloaders) auch noch nicht so bewusst.
Die Funktionen aus AVRootloader.h um die Versionsnummer auszulesen sind
ein bischen umständlicher als notwendig, einfach aus dem Grund heraus
unabhängig von der realen Speicheradresse der AppVersion zu sein. Sie
ermittelt also zur Laufzeit die Adresse der AppVersion durch Auslesen
der mit GetBootMsg zurückgelieferten Addresse. Damit wird der BootInfo
Inhalt ermittelt um auf die Anzahl der FLASH Pages die der Bootloader
benutzt zu kommen. Diese Anzahl wird mit der FLASH Page Größe
multipliziert und von der höchsten FLASH Addresse plus -4/6 subtrahiert
und schwups hast du die Adresse im FLASH an der die AppVersion steht.
Nun, ziemlich kompliziert dafür sollte es universell sein. In deinem
Falle, und ich mache es eigentlich auch immer so, lese einfach mit
pgm_read_dword(0x?????) direkt mit fester hardcoded Adresse die
AppVersion aus. Nicht schön aber effizient und funktionierend egal
welche Lockbits gesetzt wurden. Ich musste nämlich feststellen das je
nach WinAVR version der Compiler mit meinen Makros fehlerhaften Code
erzeugt.
Eventuell hast du auch nicht UseSpecialMsg=1, UseSpecialRead=1 gesetzt ?
Diese Funktionen wären dann nötig. Erstens mal UseSpecalMsg=1 um
diejenige Funktion zu aktivieren die die FLASH Addresse vom BootInfo:
Label zurückliefert, inklusive Größe in Bytes davon. Dann
UseSpecialRead=1 damit der eventuell vor dem Lesen mit LPM geschützte
FLASH Bereich der Bootsection auslesebar wird. Je nach Fuses halt.
Also ziemlich viel Aufwand und Resourcen und man sollte schon selber
wissen ob einem dies auch Wert ist im Vergleich zu einem fixen
pgm_read_dword(0x????) mit hardcoded und auf den aktuellen AVR bezogenen
Source. Übrigens exakt dies ist der Grund warum die PC-Software die
reale Adresse der AppVersion auch im Info Fenster anzeigt.
Gruß Hagen
@Thomas, habe mir mal dein Projekt angeschaut, ich beneide dich für die
Ausdauer eine so umfangreiche Dokumentation zu machen. Ist das
kommerziell ?
Und dann frage ich mich ob du als Muetze auch in der Delphi Praxis
unterwegs bist und wir von anderer Seite her schon öfters mal Kontakt
hatten ?
Hallo Hagen!
Also die UseSaveMCUSR ist gesetzt und ich habe die Anweisung zum Wert
holen direkt am Anfang der Main, aber bisher noch mit dem cli() zuvor.
Ich habe das gerade mal verschoben und bin noch am probieren.
1
intmain(void)
2
{
3
cli();
4
5
// read MCUSR saved by bootloader
6
uint8_tlSavedMCUSR=*(uint8_t*)(RAMEND);
7
8
...
9
}
Wegen der App Version vom AVR aus auslesen - nun ja, was soll ich sagen,
die UseSpecialMsg war nicht gesetzt, obwohl mir das beim anschauen
deiner Sources bei dem Test Projekt schon aufgefallen und bewusst war,
dass du die Funktion brauchst. Nun ja, mein Fehler. hust
Und wegen dem Projekt: Das ist noch der alte Stand, neue Doku
(umfangreicher, dann auch zweisprachig) ist fast fertig und die Software
auch entsprechend. Das derzeitige ist wirklich noch alt.
Aber ich denke mal, ich versuche mal meine ganzen Erkenntnisse zu deinem
Bootloader die ich hier gewonnen habe vllt. auch nochmal zusammen zu
fassen.
Und ja, der bin ich (es kann nur eine Muetze1 geben ^^). Wir hatten
schon öfters mit einander zu tun und deshalb ja auch schonmal den
Hinweis auf einen Thread bei der dp.net (also DelphiPraxis.net)
bezüglich ein paar Schwierigkeiten mit der DEC.
Und das ganze Projekt ist nicht kommerziell. Eigentlich auch schön doof,
da ich dazu erst gekommen bin, da mich ein Freund fragte, ob man da
nicht was machen kann bezüglich dieser Steuerung beim Aquarium. Es gibt
genug Systeme, z.T. mit weniger Umfang bzw. weniger Möglichkeiten, aber
alle haben eins gemeinsam: Startpreis bei rund 150-200 €. Eigentlich
könnte man das Projekt vllt. doch nochmal etwas professioneller aufbauen
und die Geräte schonmal zusammenstellen, die Gewinnspanne bei einem
fairen Preis von 50-100 Euro wären noch recht immens...
Danke mal wieder für die guten Hinweise - vor allem da der AppVersion
Fehler mal wieder bei mir lag - schlimmer noch: es war mir schonmal
bewusst...
Gruss,
Thomas
// lese Kopie von MCUCSR gespeichert durch Bootloader vom Stack
4
_MCUCSR=*(uint8_t*)(RAMEND);
5
}
Damit erzeugen wir erstmal eine "Procedure" die ohne Stackframe oder
Return kompiliert wird, also nur das nackige _MCUSR =
*(uint8_t*)(RAMEND); enthält. Dieses Codestückchen wird nach einem Teil
der Initialsierung durch den WinAVR Startup Code und bevor der Main()
Code kommt durch den Linker relokiert. Somit ist sichergestellt: Du als
programmierer der keine speziellen Sachen macht sondern ganz stink
normal WinAVR benutzt hat keine Chance den Stack noch vor dem Auslesen
des gesicherten MCUSR register zu zerstören. Das könnte in deinem Main
der Fall sein ohne das du es dir bewusst bist.
Nicht schön aber der einzigst gangbare Weg unter WinAVR mit der
geringsten Fehlerwahrscheinlichkeit. Das ganze Problem entsteht weil wir
das MCUSR Register eben löschen müssen (bzw. zumindest das WDR Bit) und
es nicht wieder setzen können. Löschen wir das WDR Bit nicht so bleiben
die nachfolgenden Schreibzugriffe um den WDT zu programmieren erfolglos.
Da der WDT eine gültige RESET Source ist und die eigene Anwendung auch
unabhängig vom Bootloader eventuell wissen muß welcher RESET ausgelösst
wurde, wir dieses Regsiter also löschen müssen damit der Bootloader den
WDT programmieren kann und der WinAVR eg. Programierer den Stack
unbeabsichtigt zu früh überschreiben könnte, wir auch keine Register für
unsere Zwecke mißbrauchen können, verbleiben nur sehr wenige
Alternativen unser Ziel zu erreichen. Und der jetzige Weg ist der einige
der in meinen Augen übrig bleibt und die wenigsten Seiteneffekte hat.
Auf einigen AVR gibt es 3 zusätzliche Register im Addressbereich der
Ports die man hätte dafür benutzen können aber exakt diese wertvollen
Register wollte ich mir für meine Projekte aufheben, zumal nicht jeder
AVR solche hat.
Auch die Option UseBootMode baut darauf das das MCUSR Register im
Bootloader gelöscht wird. Diesesmal nicht nur bezogen aud das WDR Bit
sondern auch auf alle anderen RESET Sourcen. Denn je nach UseBootMode
selektieren wir ein Event das bei nicht programmierten AVR, also ohne
Anwendung, wenn wir es nicht löschen würden den Bootloader dann
aussperrt. Der Bootloader würde dann zb. nur auf den Borwout RESET
reagieren und nicht mehr auch wenn er garkeine Anwendung vorher schon
installiert hat. Dh. UseBootMode stellt sicher das der Bootloader beim
RESET und eben auch bei nicht vorhandener Anwendung ausgeführt wird.
Diese zweite Möglichkeit tritt aber nur auf wenn der Bootloader quasi
eine nicht vorhandene Anwednung aufruft dann durch die 0xFF im
Anwedenungsflash wquasi wieder in sich selber reinläuft und bei diesem
zweiten Aufruf auf ein MCUSR register trifft das 0 ist auf Grund dessen
das es beim ersten Aufruf gelöscht wurde.
Naja, ziemlich viel worte für diese einfachen Sachverhalte.
Meine init_WDT() Procedure wird noch weiter vor verlegt, also noch
früher ausgeführt nämlich noch bevor der WinAVR Startup Code den SRAM
initialisert, also .data und .bss (preinitialisierte globale
Variablen/Strings etc.pp.). Mit langsamen Takt und schnellem WDT ist das
zu präferieren.
Gruß Hagen
er bekommt keine Verbindung, bzw. der AVR antwortet nicht.
Also verbinde RX-TX Pin vor dem AVR, natürlich ohne AVR. Versuche erneut
einen Connect und es müsste im Protokoll zu sehen sein das er 1.) zum
1-Wire Modus wechselt, 2.) die Daten die er sendet einmalig auch wieder
empfängt.
Wenn dies nicht so ist dann stimmt irgendwas mit einem COM Port,
Hardware, Windows Setup nicht.
Gruß Hagen
Hi Hagen,
die Hardware ist OK.
Ein Testprogramm mit USART des m32 funktioniert perfekt.
Wie gesagt: im gleichen Steckplatz, mit gleichem Bootloader (nur .inc
und Codegröße geändert) läuft es auf dem m644P ja. Nur der m32 will
nicht.
Ist kein Beinbruch, werde den m32 durch m644P ersetzen (ist ja keine
Großserie).
@Thilo,
Das sind zu wenig Informationen. Schaue dir mal deine Postings selber
an. Du hast einen lauffähigen Bootloader für Mega644, tauscht diesen in
deinem Board mit M32 aus, änderst logischerweise im AVRootloader.asm auf
den M32, und es geht nicht. Protokoll zeigt auch das es nicht geht, der
M32 antwortet nicht.
Tja das ist das was ich an Infos habe.
Ich kann dir versichern, mit den fortschreitenden Versionen wurde die
Benutzerschar immer größer und auch das Feedback mit welchen AVRs in
welcher Konfiguration der Bootloader schon eingesetzt wurde. Der M32 ist
darunter.
Es muß also bei deinem Aufbau irgendwas falsch laufen. Lösche alle
Dateien bis auf die Sourcen und Konfigurationen. Dann kompiliere das
AVRootloader.asm nochmal neu mit BootCodeSize=0 und dann nochmal mit dem
Wert aus CSEG used. Stelle dann sicher das du auch wirklich das korrekte
HEX File auf deinen M32 installierst und nicht eventuell eine der vielen
anderen Kopien aus den vielen anderen Ordnern ;) Ich kenne die
Arbeitsweise mancher Programmierer und da kann man schonmal mit den
Kopien durcheinander kommen, ich muß ja auch öfters so arbeiten.
Besonders weil AVRStudio in der Pfadangabe zum HEX File sich die alten
Einstellungen merkt und nicht diejenge zum Projekt.
Gruß Hagen
Hallo Hagen!
Ich habe es nun auch endlich hinbekommen den MCUSR Code von deinem
Bootloader sauber in meinen Code zu bekommen. Als erstes hatte mich an
deinem folgenden Code schon immer verwundert, warum du eine init_MCUSR()
deklarierst mit den schönen Attributen von wegen früher Ausführung und
Init, aber das eigenliche Lesen wiederrum machst du in einer
init_prots() ohne all' diese schönen Attribute. Nun ja, somit wird diese
Routine wohl auch nicht aufgerufen.
Dein Code den du vorgeschlagen hattest:
Das läuft aber so noch nicht richtig, da die Variable ja eine globale
ist und somit mit 0 initialisiert wird. Also muss man diese globale
Variable davon noch ausschliessen - mal wieder mit Attributen.
Das ist aus dem Header, daher das "extern". Die Deklaration in der .c
Datei kann man sich ja denken.
Damit klappt dies nun einwandfrei und ich kann auslesen ob ich von
deinem Bootloader komme, eigener WDT Reset, Brown Out oder direkt
gestartet. Klappt nun einwandfrei.
Das ganze Firmware Update etc ist nun auch stabil und läuft super
integriert in meinem Client.
Also, danke nochmals für den super Bootloader!
Gruss,
Thomas
Du musst dann nicht darauf achten ob gvaResetFlags mit 0 überschrieben
wird oder volatile deklarieren. Der Init Code des GCC der die globalen
Variablen mit 0 initialisert wird in einer Section gelinkt die noch vor
der Section .init5 kommt. Dh. der obige Code sollte nach der
Initialisierung des GCC aber vor der Main() aufgerufen werden.
Gruß Hagen
Hallo Hagen!
In deinem Test Projekt ist auch alles richtig drin. Nun ja, ich hatte
mich halt auf das Beispiel aus diesem Thread gestürzt. Ich hätte da eine
"declared but unused" Warnung vermisst...
Ansonsten das mit der 0 Initialisierung des Startup Codes, das kann gut
sein, da ich das mit dem Reset Code nebenbei mit ein paar anderen
Änderungen an der Firmware gemacht hatte. Von daher werde ich das gleich
nochmal wieder entfernen.
Jetzt muss ich nur noch klären, warum die AppVersion über den Controller
ausgelesen immer eine total komische Zahl ergibt. Dazu doch gleich mal
eine neue Frage: Wenn ich über dein Interface eine neue Firmware flashe,
diese aber nicht verschlüsselt ist und direkt ein HEX file gegeben wird
(kein ACY), dann kann ich die gewünscht AppVersion in der Methode des
Interfaces zurück geben, oder? Weil soweit ich verstanden habe, ist die
Masked Option zum überprüfen vor dem Flash nur bei verschlüsselter
Firmware von nöten, somit sollte er bei mir die neue Version nur
abfragen. Sehe ich das richtig? Also bei dem Masked Parameter auf true,
gebe ich dann 0 zurück und im anderen Falle die neue AppVersion?
Gruss,
Thomas
Bei Masked=TRUE solltest du in diesem Falle $FFFFFFFF = -1 zurück geben.
Allerdings wird .GetAppVersion(True) ausschließlich nur dann aufgerufen
wenn der IAVRootloader Daten verschlüsseln muß. Es gibt zwei Momente in
denen das passieren kann, erstens man erzeugt and ACY File und der
verbundene AVR unterstützt die Verschlüsselung, egal ob er auch
unverschlüsselte Daten zulässt oder nicht. Zweitens, der AVR soll mit
einem HEX File geflsht werden und erwartet zwingend verschlüsselte
Daten. Dann wird IAVRootloader das HEX File intern und temporär in einem
Stream speichern und ein verschlüsseltes ACY kompilieren. Ganz genau
genommen wird intern bei einem HEX/EEP immer ein ACY Stream erzeugt, so
als wenn man den Compile Button erzeugt. Meine .DoProgram() Methode
arbeitet intern also immer mit einem ACY Script. Dies ist entweder im
Speicher temporär erzeugt oder eine reale ACY Datei in den Speicher
geladen.
Wenn also Masked=True ist so sollte deine Methode entweder $FFFFFFFF
zurückgeben und damit die Versionüberprüfung im AVR Bootloader defakto
deaktivieren. 0 wäre grundsätzlich falsch da es bedeuten würde das du
die kleinste Versionnummer benutzen möchtest. Wenn nun schon Version
0.0.0.1 installiert ist so würde der AVR Bootloader die Version 0.0.0.0
nicht akzeptieren und den programiervorgang abbrechen.
Gibst du zB. $01FF02FF zuück so überprüft der AVR intern das die aktuell
installierte Version klein oder gleich 1.?.2.? ist. Dh. installierte
Version wie 1.0.2.0, 1.123.2.15 usw. wären gleich. Wäre die installierte
Version aber 1.?.3.? oder 2.?.?.? dann wäre sie größer als die zu
installierende Version.
Gibst du ohne die $FF Masken die gleiche Versionsnummer wie bei
Masked=FALSE zurück, also zb. 1.2.3.4 dann überprüft der AVR also auch
alle 4 Zahlen mit der installierten Version.
Ergo: gib -1 oder $FFFFFFFF bei Masked=True zurück und du hast keine
Probleme da die Versionüberprüfung im AVR dann deaktiviert ist. Diese
Überprüfung erfolgt nur bei verschlüsselten Daten.
Beim Auslesen der AppVersion in der eigenen AVR Anwendung gibt es zwei
Wege:
1.) der direkte Weg: pgm_read_dword(0x???????) oder
pgm_read_dword_far(0x??????) wenn mehr als 64Kb FLASH vorhandeen, oder
RAMPZ auf 1 setzen und mit pgm_read_dword() arbeiten. Die Adresse
0x?????? findet man im Info Fenster meiner PC-Software wenn man mit dem
AVR verbunden ist. Dieser Weg funktioniert immer egal welche zus.
Features im Bootloader aktiviert/nicht aktiviert wurden und egal welche
Lockbits man im AVR gesetzt hat solange der LPM Opcode für die
Applikation freigegeben ist.
2.) der indirekte Weg: über die Funtionen in AVRootloader.h. Dazu muß
aber zwingend der Bootloader mit UseSpecialMsg=1, UseSpecialRead=1 und
UseSpecialBootVect=1 konfiguriert sein. Wie diese Funktionen dann benutz
werden um dynamisch die Adresse der AppVersion im FLASH zu berechnen
habe ich in einem vorherigen Thread schon beschrieben.
Ich würde den direkten Weg gehen, ist simpel, verbraucht weniger Code in
der eigenen Anwendung und die UseSpecialXXX Funktionen müssen nicht
zwingend in den Bootloader eingelinkt werden, was wiederum im Bootloader
Code spart.
Konzeptionell habe ich in AVRootloader.h nur deshalb diese
Implementierung gemacht damit man dieses Header benutzen kann für die
Programierung einer universellen Bootloader-Update-Anwendung. In diesem
Moment würde der Bootloader sowieso die UseSpecialXXX Funktionen
einlinken damit er durch diese Anwendung updated werden kann. Es ist
dann hilfreich wenn diese Update-Anwendung auf universelle Weise die
wichtigen Daten wie die BootMsg, BootInfo und AppVersion ermitteln kann,
unabhängig vom jeweiligen AVR Typ und den anderen Einstellungen des
jeweiligen Bootloaders.
Gruß Hagen
Hallo Hagen!
Danke mal wieder für die Ausführungen. Erstmal zu dem einfacheren Thema:
Die AppVersion will ich weiterhin mit deinen Beispielquellen aus dem
Test Projekt auslesen, da diese allgemeingültig sind. Ich müsste sonst
desto mehr den Personen X erklären, welche das Projekt auf einem anderen
Mikrocontroller nachbauen wollen. Von daher würde ich die direkte
Methode vermeiden wollen.
Und nun nochmal zum anderen Thema: Meine Frage war eher: wenn ich nun
eine neue Version auf den AVR bringe, wie und wo kann ich die neue
Versionsnummer festlegen? Also die Versionsnummer, welche dann auch im
Atmel Flash abgelegt wird. Die Frage interessiert mich vor allem, da ich
es bisher noch nicht gelöst habe.
Gruss,
Thomas
Ich gehe davon aus das du mein IAVRootloader Interface benutzt. Deine
IApplication Impelemtierung muß die Methode .GetAppVersion(Masked:
Booelan): Integer auch implementieren.
Wenn Masked = FALSE dann gibts du die neue Versionnummer als 4 Bytes
Wert zurück.
Wenn Masked = TRUE dann gibts du die gleiche neue Versionsnummer zurück
aber alle Bytes die nicht überprüft werden sollen werden mit $FF ODER
verknüpft.
Ich habe angenommen das dir das schon klar ist. Falls du dich nicht auf
IAVRootloader beziehst und meine PC-Software meintest dann geht die so:
Auf der 1. Page sind 4 Edit Felder mit der neuen Versionsnummer. In
diese nun die Versionsnummer eingeben. Die 4 Checkboxen rechts daneben
stelen die Maskierung in der Abfrage auf dem AVR dar. Jeweils die
entsprechende Checkbox anhacken deren Versionsnummerbyte überprüft
werden soll.
Das Überprüfen der Versionsnummer ist aber nur aktiv wenn mit
Verschlüsselung gearbeitet wird.
Alternativ kann man die PC-Software auch per Kommandozeilenparameter
aufrufen. Der Parameter -V definiert die neue Versionsnummer.
zb. -V0102A0FE0C definiert die neue Versionsnummer 1.2.160.224 und der
letzte HEX Wert 0C die Bitmaske der anzuhackenen Checkboxen und damit
auch welche der 4 Bytes überprüft werden muß. In diesem Falle also die
beiden höchstwertigen Zahlen 1.2. die überprüft werden sollen.
Nun, diese neue Versionsnummer wird beim nächsten Programmieren des
FLASHs über den Bootloader programmiert. Es gibt keine Schnittstelle im
Protokoll diese Versionsnummer unabhängig zu programmieren. Defakto ist
es ja auch logisch denn auch die Versionsnummer befindet sich im
Anwendungsflash.
Du kannst meinen AVRootloader.asm Source auch erweiteren um eine eigene
kleine Spezialfunktion die direkt die AppVersion als DWord zurückgibt.
Das könnte so aussehen:
1
.if UseSpecialVersion
2
getappversion:
3
ldi zl, byte1(AppVerAddr)
4
ldi zh, byte2(AppVerAddr)
5
ldi r22, byte3(AppVerAddr)
6
xout RAMPZ, r22
7
lpm r22, z+
8
lpm r23, z+
9
lpm r24, z+
10
lpm r25, z+
11
ret
12
.endif
Diese Funktion gibt in den Registern r25:r24:r23:r22 die AppVersion
zurück.
In Special.inc muß dann am Ende die Vektortabelle geändert werden:
Nun noch UseSpecialVersion als Define in AVRootloader.asm eintragen und
die Codegrößenberechnung am Anfang von Datei Special.inc erweitern.
In AVRootloader.h dann folgende Erweiterungen
Vorteil dabei ist es das wenn man UseSpecialRead=0, UseSpecialWrite=0
setzt ,so denoch auf einheitlichem Wege über den Bootloader an die
Version herankommt und dabei weniger an FLASH im Bootloader wie auch in
der eigenen Anwendung verbraucht.
Hm, ich weise nur ungern darauf hin das ich mich wiederhole. Alle diese
Informationen findet man wiederholt hier im Thread erklärt. Ich nehme
also an das ich nicht in der Lage bin einen Sachverhalt verständlich zu
erklären oder meine ausführlichen Erklärungen nicht ordentlich gelesen
werden ;)
Gruß Hagen
Hallo Hagen!
Nein nein - das mit der AppVersion hatte ich auch schon so probiert, um
die neue Version zu setzen. Ich war mir nur nicht sicher, ob es der
richtige Weg ist, da er bei mir immer wieder eine andere Versionsnummer
zurück bekommen. Von daher war ich am zweifeln, ob das setzen so richtig
ist. Von daher wollte ich nur eine Bestätigung, dass die Version so
gesetzt wird (hatte ich ja auch so beschrieben zwei Beiträge von mir
zuvor), nur das ich den Teil mit Masked = true etwas missverständlich
dargelegt hatte - obwohl ich es schon so verstanden hatte wie du es
zuvor und danach erneut beschrieben hast.
Und mit der AppVersion setzen habe ich nach nun schon dreimaligen
Lesen des gesamten Threads nie eindeutig rauslesen können, da es immer
nur im Zusammenhang mit ACY bzw. vor allem verschlüsseltem Bootloader
genannt wurde, aber nie für unverschlüsselte Bootloader. Ich hatte es ja
schon richtig vermutet und wollte dies nur bestätigt haben, nur leider
hattest du den ganzen anderen Teil nochmals ausführlich erklärt...
Es tut mir leid wenn es zu Missverständnissen gekommen ist. Und ich
entschuldige mich auch, wenn ich die Fragen vllt. ungenau stelle. Ich
habe diesen Thread nun schon dreimalig komplett gelesen und versuche
von daher nur noch offene Dinge zu fragen.
Danke nochmals für das Beispiel mit der Anpassung des Bootloaders. Ich
hoffe ich kann den Bootloader dann als ganzes (u.a. mit angepasstem Code
von dir) mit beilegen.
Aber ich denke auch, dass ich keine weiteren Fragen haben werde.
Hey schon gut, wollte mal nur Luft rauslassen ;)
Die AppVersion wird durch dynamisches Patchen des HEX Files
programmiert. Geht auch garnicht anderst, da ansonsten wegen den 4 Bytes
im Bootloader eine ganze FLASH Page erst gelesen dann im Speicher
geändert und wieder programmiert werden muß. Um also nicht eine solche
zusätzliche Funktion in den AVR Bootloader programmieren zu müssen, oder
eine FLASH Auslesefunktion im Protokoll zur Verfügung stellen zu müssen
(Sicherheitsproblem), habe ich eben den Weg gewählt die AppVersion nur
im Zusammenhang mit dem Programmieren der eigenen Anwendung aus dem HEX
setzen zu können.
Die .GetAppVersion(True) wird nur aufgerufen wenn ein HEX File zu einem
ACY verschlüsselt werden muß. Ob dies als Datei gespeichert wird hängt
nur davon ab ob der Compile Button gedrückt, .Methode .DoCompile()
aufgerufen wurde oder der Program Button gedrückt, .Methode .DoProgran()
aufgerufen wurde.
Intern erzeugt die Software also in jedem Falle ein ACY als
Speicherstruktur die entweder wie ein Script sofort ausgeführt oder als
Datei gespeichert wird. Ob dieses ACY Script nun verschlüsselt oder
unverschlüsselt erzeugt wird hängt vom Feature des Bootloaders im AVR
ab. Je nachdem wird also .GetAppVersion(TRUE) aufgerufen oder nicht.
Hoffe das dies verständlicher rüber kommt, kenne solche
Kommunikationsprobleme zur Genüge in meiner täglichen Arbeit ;)
Gruß Hagen
Hi Hagen,
betrifft
>@ Hagen Re:>Ich hab' jetzt nicht den ganzen langen Thread durchforstet, daher frag'>ich dich einfach:>entweder habe ich Tomaten auf den Augen oder ich check's nicht, aber>dieselbe Einstellung wie auf dem Bild funktioniert auf mehreren mega644P>problemlos, '.inc' - File vom mega32 aktiviert (644 deaktiviert) läuft>nicht auf dem mega32 (16MHz) (siehe Protokoll). Benutzt wird RS232 mit>max232, µC und Verbindung ist OK.>Kannst du mir sagen was ich übersehen habe?
Habe den Fehler gefunden.
Es lag am USB-RS232-Treiber (FTDI-Chipsatz). Trotz der selben Hardware
läuft der Treiber auf einem anderen Notebook nicht mehr sauber. Mit dem
ursprünglichen Notebook funktioniert alles prima.
Ich hoffe das hilft dir, falls ähnliche Fragen in dieser Richtung
kommen.
Gruß Thilo
Kleiner Nachtrag:
durch setzen der CKOPT - Fuse lässt er sich jetzt auch mit allen
USB-RS232 Adaptern programmieren. Irgendwie scheint die Startup-Zeit
(Quarz-Anschwingen) nicht ganz gepasst zu haben.
Hallo,
Versuche leider ohne Erfolg, beim starten des Bootloaders Pin6 von PortD
dauerhaft auf Low zu ziehen, muss dazu sagen das ich nicht wirklich viel
Ahnung von ASM habe schreibe meistens alles in C
Hallo,
Gute Arbeit mit dem Bootloader, Hagen! Funktioniert sehr gut!
Jetzt habe ich mal eine Frage:
Ich habe mir einen Asuro Roboterbausatz gekauft wo ein
Atmega8 drauf ist. Diesen Atmega8 kann man beim Asuro mit Infrarot
programmieren.
Die Entwickler habe da einen Bootloader draufgepackt der das
Programmieren
per Infrarot möglich macht.
Dieser Bootloader ist aber nicht quelloffen und nur für Atmega8.
Ich habe nun diesen Asuro Roboter durch einen Atmega32 erweitert und mit
einer ISP und RS232 Schnittstelle bestückt.
Auf dem Atmega32 ist AVRootloader drauf und das Programmieren über die
RS232 Schnittstelle funktioniert sehr gut.
Ich wollte nun deinen Bootloader so erweitern das ich die TX Signale
über Infrarot sende. Dafür ist eine Infrarot-LED mit dem TX-Port und
einem Timer-PIN vom Atmega32 verbunden.
Über den Timer-PIN wird 36khz Frequenz moduliert und über den TX-PIN
kommen ganz normal die TX-Daten.
Wenn ich jetzt ein Programm schreibe wo ich etwas über IR-Senden will,
aktiviere ich nur die Modulationsfrequenz und sende die Daten ganz
normal über UART. Und es klappt Hardwaremäßig auch!
Damit das ganze funktioniert habe ich mir gedacht das ich im Bootloader
nur die Modulationsfrequenz am OC2 aktivieren muss damit das ganze auch
über IR läuft. (Denn die TX-Daten sollten ja genauso wie bei einer
Kabelverbindung kommen.Oder?)
Ich habe das ganze eingefügt aber es funktioniert nicht? Was mache ich
falsch? (Wie gesagt über Kabel funktioniert das ganze!)
Hier die Änderung im Quellcode:
@rubiktubik:
Das wird leider so nicht funktionieren. Der Bootloader benötigt eine
bidirektionale Verbindung und deine IR Strecke geht ja nur in eine
Richtung.
Du könntest alle Sendedaten im Bootloader in's Leere laufen lassen und
nur die Empfangsdaten berücktsichtigen, das würde gehen, mit der
Einschränkung das alle Lesefunktionen wie EEPROM oder SRAM lesen nicht
mehr gehen. Auch dein IR Sender müsste von Anfang an exakt wissen für
welchen AVR die gesendeten Daten bestimt sind da die vom AVR gesendeten
Daten -> BootInfo nicht empfangen werden können.
Auf alle Fälle ist es mit dem Stückchen Code nicht getan und ehrlich
gesagt verstehe ich auch garnicht was du damit bezwecken möchtest.
Was hast du denn für Software auf der IR Sendeseite ? Falls du es mit
dem Asuro Bootloader probiert hast dann kann das garnicht funktionieren.
Du müsstest mir schon deinen kompletten Aufbau erklären damit ich dir
weiterhelfen kann.
Gruß Hagen
Hallo,
Der Sinn der Sache ist das ich meinen Asuro per Infrarot programmieren
kann.
Normalerweise ist im Asuro der Atmega8. Mit diesem kann die
Asurosoftware IR-Software was anfangen.
Beim Atmega8 funktioniert das ganze so, dass auf eine IR-LED eine
Modulationsfrequenz und ein TX Signal gegeben wird. (Siehe Anlage und
Asurowiki)
Ich habe jetzt einen Atmega32 an den Asuro gebaut.
Auf dem Atmega32 habe ich deinen Bootloader drauf und ich kann per
Kabelverbindung(RS232) den 32er programmieren.
Ich mir das so gedacht das:
Dein Bootloader sendet auch über TX und RX.
Das heisst das ich nur noch
im Bootloader die Modulationsfrequenz aktivieren muss und das gleiche
Signal was normalerweise durchs Kabel geht, geht jetzt durch IR.
Das was der Bootloader macht ist ja das Senden der Daten über RX und TX.
Wo die letzendlich durchgehen(Kabel oder Infrarot) ist dann egal.
Was ich natürlich nicht bedacht habe, ist das deine Windowssoftware zum
erkennen eines gültigen(CONNECTED) Signals auch eine RX Leitung
benötigt.
Wenn ich die RX-Leitung auch noch über IR verbinde müsste es doch gehen?
Hier die Asuroseite für die Asuroseite:
http://www.asurowiki.de/pmwiki/pmwiki.php/Main/Infrarotschnittstelle
Und die PC-Seite
http://www.asurowiki.de/pmwiki/pmwiki.php/Main/InfrarotRS232Transceiver
Im Anhang: die Beschaltung der IR-LED.
Die wesentliche Frage ist doch warum du überhaupt IR benutzen möchtest ?
Sie ist langsammer, störanfälliger und kostet dir auch noch zusätzlichen
Aufwand.
Das was mich interessiert ist die Frage wie sieht die Gegenstelle
hardwaretechnisch aus. Deine Links sind gut&schön aber wenig hilfreich
für mich um sehr schnell einen Überblick zu erlangen. Immerhin kannst du
ja nicht verlangen das ich mich jetzt Stunden mit deinem Problem befasse
noch dazu wenn ich keinen Sinn darin sehe.
Also: auf PC Seite wie wird dort der IR Port umgesetzt? Wenn er nur die
RS232 nach IR umsetzt dann dürfte das sehr wohl gehen, denn so wie es
aussieht hat der Asuro ja einen TSOP als Empfänger und eine IR SendeLED
als Sender integriert. Es geht also halbduplex bidirektional.
Du solltest den ATMega32 mit externen Quarz betreiben, UseAutoBaud=0 und
BootBaudrate=2400 setzen. Eventuell musst du UseUartInvert=0 oder 1
anpassen je nach Pegel die vom TSOP ankommen. Auch die Anschaltung der
IR-SendeLED ist entscheidend also an welchem Pin deren Anode hängt. Wenn
das mit den Pegeln korrekt eingestellt wurde dann sollte das sogar
funktionieren.
Entscheidend ist die PC Seite. Am besten einen RS232 zu IR Umsetzer
damit du meine PC Software benutzen kannst.
Mal angenommen die Probleme mit den richtigen Pegeln, Baudrate, PC-Seite
mit RS232<->IR Wandler sind gelösst dann wird das auch funktionieren.
Denn der Rest ist eine halbduplex bidirektionale Kommunikationsstrecke
und das benutzte Protokoll des Bootloaders unterstützt diese
Kommunikationsart. Dh. in deinem Falle könntest du zb. auch das EEPROM
lesen und schreiben über IR.
Gruß Hagen
Hab gerade den PC teil gefunden. Scheint ja nicht so sauber zu
funktionieren und die Hardware ist ja wirklich einfachst und damit
störanfällig aufgebaut.
Probier es, aber empfehlen würde ich dir sowas nicht da es nicht als
"professionell" zu bezeichnen ist. Mit viel Fuggelei ist es aber
sicherlich zum Laufen zu bekommen.
Wenn ich das richtig sehe so musst du UseUartInvert=0 setzen, also mit
physikalischen Pegeln der RS232 arbeiten.
Öffne AVRootloader.ini und setze dort [Timeouts].Option = 1 damit du in
der PC-Software siehst was empfangen wird bei einem Connect.
Vom Aufwand her, der Stabilität usw. würde ich dir ja den RS232-1-Wire
Modus des Bootloaders empfehlen. Der geht bis maximale Baudrate sauber
und wie im 1-Wire.png Schematik zu sehen ist benötigt der auch
wesentlich weniger Bauteile. Auf deinem Board benötigst du dann nur
einen 2-Pin Stecker.
Gruß Hagen
Hallo,
Danke für die schnelle Antwort.
Es ist mir klar, dass das mit Infrarot nicht
gerade die beste Lösung ist.
Ich habe bei meinem Asuro auch ein paar Änderungen am Sender und
Empfänger
gemacht um das Signal sauberer und stabiler zu Übertragen.
Der Sinn der Sache ist der das ich beim Programmieren immer ein Kabel an
den Asuro anschliessen muss. Wenn ich also kurz was testen will, muss
ich das Kabel anschließen, programmieren und zum ausprobieren wieder
abschliessen.
Beim nächsten Test (z.b. Ein Wert im Programm geändert) muss ich wieder
das Kabel anschliessen usw.
Was es beim original Atmega8 IR-Flashprogramm noch gibt ist die
Funktion:
"Transfer only new pages"
ich denke mal das er nicht die ganze Datei komplett überträgt sondern
nur kleine Teile die sich geändert haben z.b. ein Wert einer Variable.
Dann ging das Programmieren recht schnell.
Ich weiss nicht wie das bei dir funktioniert!?
Aber danke für die Tipps!
Eine solche Funktion ist nicht implementiert wobei das Protokoll sowas
unterstützt. Dh. man müsste nur die PC Software leicht umschreiben um
sowas ebenfalls zu unterstützen der komplette Rest der Software könnte
es jetzt schon.
Das Problem mit einer solchen Funktion ist das auf der PC Seite die alte
HEX und das neue HEX vorliegen müssen. Denn nur so kann die PC Seite
ohne den FLASH erneut auslesen zu müssen die Differenzen zwischen Alt
und Neu ermitteln. Aus meiner Sicht hat eine solche Vorgehensweise aber
gravierende Probleme die man erstmal sauber lösen muß.
1.) was ist wenn das alte HEX File nicht mit den Daten im FLASH 1 zu 1
übereinstimmt ?
Die Bootloader Software würde bei der Übertragung der Differenzen somit
eher den AVR und dessen Program zerstören. Das müsste nun extra
abgesichert werden. ZB. per Prüfsummen über den FLASH Inhalt der durch
die PC Seite abgefragt wird. Diese Prüfsumme wird abgefragt jeweils vor
dem Programmieren um zu erkennen ob das angegebene alte HEX File auch
wirklich mit dem FLASH übereinstimmt und auch nach dem Programmieren um
zu überprüfen ob der neue FLASH Inhalt auch 1 zu 1 mit dem neuen HEX
File übereinstimmt. Nun, Prüfsummen haben aber ein Problem denn es gibt
defakto keine Prüfsumme die zb. 16Kb FLASH mit 100% Sicherheit abprüfen
kann. Die einzige Prüfsumme die das kann würde ebenfalls 16Kb groß sein
und damit 1 zu 1 der FLASH Inhalt den man erwarten würde.
2.) Sicherheitsproblematik. Eine solche Funktion öffnet einem Abgreifer
eine Tür die er für seine Angriffe ausnutzen könnte. Da mein Bootloader
aber exakt diese Sicherheitsproblematik lösen soll wäre ein solches
Vorgehen also indiskutabel. Hier muß man abwägen zwischen dem einen und
dem anderen Feature das man sich wünscht.
3.) "Transfer only new Pages". Die Wahrscheinlichkeiten im Alltag ! Ich
meine damit den Punkt das die Wahrscheinlichkeiten im Alltag so gelegt
sind das wenn sich eine Page verändert sehr häufig alle nachfolgenden
Pages ebenfalls ändern. Da dadurch zb. viele Funktionsadresse im HEX
reallokiert/verschoben werden und somit auch zb. die ISR EInsprungpunkte
sich verändern ist die Wahrscheinlichkeit sehr hoch das sich die ersten
FLASH Pages ändern und auch alle nachfolgenden. Das ist aber nur eine
Vermutung meinerseits und man müsste dies erstmal praktisch ermitteln.
Was ich aber damit aussagen möchte ist das ich meine das eine solche
Funktion im Alltag der Programmierung eher weniger als mehr Sinn macht.
4.) was ist mit Anwendungen die sich selbst modifizieren können. Dh.
also solchen Anwendungen die veränderliche Daten im eigenen FLASH
abspeichern können. Nungut, mit solchen Anwdendungen hätte man eh ein
grundsätzliches Problem auch mit meinem Bootloader der diese Daten
einfach überschreiben würde. Mit der hier diskutierten Funktion und der
Problematik einer Prüfsumme über den FLASH würde das dann dazu führen
das die PC Seite die korrekte alte HEX Datei als ungültig erkennen würde
und das Programmieren somit verweigert.
Im gewissen Sinne ist diese Funktionalität also eher eine Augenwischerei
um den vorher gebauten Schaden durch die Wahl der IR Schnittstelle
abzuschwächen. Alles in Allem also aus meiner Sicht viele Indizien die
ihre eigene Sprache sprechen. Ich möchte das wirklich nicht schlecht
machen aber mal pragmatisch darüber nachgedacht sollte man schon zu
ähnlichen Gedanken kommen.
Du sprachst die Problematik an das du jedesmal einen Stecker dranstecken
möchtest. Nun was für einen Unterschied macht es mit dem IR-Dongle auf
wenige Zentimeter heran gehen zu müssen um mit 75% Wahrscheinlichkeit
ein neues Program flashen zu können ? Das dann mit 2400 Baud statt mit
115200 Baud, mit höherer Fehlerwahrscheinlichkeit. Ich für meinen Teil
erwarte von einem Bootloader als aller erstes und wichtigstes
"Stabilität".
Gruß Hagen
Für 20 Euro würde ich daher ein fertiges Bluetooth Dongle kaufen das
RS232 unterstützt. Das drangepappt an die RS232 des AVRs und auf
PC-Seite über einen virtuellen COM Port gearbeitet. Schon erledigen sich
mit wenig Investitionen all deinen Probleme ;) Wenn du noch den RTS Pin
am RESET des AVRs anschließt ist es eine Frage von 5 Minuten um die
Konfiguration der Bootloader Software anzupassen, und schwups brauchst
du noch nichtmal irgendeinen Taster auf dem Asuro drücken um die neue
Software aufzuspielen.
Gruß Hagen
Hallo Hagen,
ich versuche gerade ein kleines Kommanadozeilen-Tool unter Linux zu
basteln welches EE-Prom-Daten über den Bootlader lesen und schreiben
kann.
Evtl. schalte ich da noch ein graf. Frontend davor.
Das Lesen geht schon, aber nur weil ich die Sache mit der CRC hier
ignorieren kann bzw. fixe Werte setzen kann.
Leider komme ich mit der 16Bit CRC arg ins schleudern.
Was ist denn das nun genau für ein Algo? Gibt es einen init-Vector und
einen finalen Vector?
Aus dem AVR-ASM werde ich nur bedingt schlau.
Meine C-Routine wirft mit dem Polynom 0xA001 bzw. 0x8005 und
verschiedenen Anfangswerten immer was Anderes raus. :-(
Ist da noch ein Trick dabei oder übersehe ich da was?
Gruß
Fabian
Hallo Hagen,
vielen Dank für den Hinweis und deine Mühen!
Werde das mal vergleichen.
bei diesem(deinem) Code wird schonmal anders herum geschoben...
(Daher auch mein gespiegeltes Polynom)
Denke damit komme ich klar.
Gruß
Fabian
Hallo Hagen,
ich nochmal kurz:
Damit scheit es zu gehen zumindest stimmt mal eine Summe.
Kann dein Kurzer Blick ein OK geben?
Optimieren kann man ja immer noch...
uint16_t crc16(unsigned char* data, int length, uint16_t crc)
{
uint16_t poly = 0xA001;
int c, i;
for (c = 0; c < length; c++)
{
crc ^= data[c];
for (i=8; i>0; i--)
{
if (crc & 1)
{
crc >>= 1;
crc ^= poly;
}
else
{
crc >>= 1;
}
}
}
return crc;
}
Vielen Dank und viele Grüße
Fabian
Das dürfte dem Compiler bei der Optimierung auf die Sprünge helfen.
Idealerweise uint16_t crc -> R25:R24 und damit von Anfang an im Result,
data in R23:R22 wird nach R31:R30 = Z per MOVW kopiert und später mit LD
temp, Z+ bei crc ^= *data++ compiliert. length in R21:R20 kann im Kopf
der while Schleife erstmal subiw R21:R20 dekreetiert werden und da
unit16_t, also ohne Vorzeichen würde das Carry Flag die Abbruch
Bedingung darstellen.
Am Ende wird crc da es schon in r25:r24 steht direkt als Resultat
zurückgegegen. In der innersten Schleife dekremtieren wir i was dem
WinAVR mit Sicherheit zu einem besserem Code verhilft.
ABER! das ist das was ich als Programmierer vom WinAVR GCC verlangen
würde, erwarten würde ich dagegen das er erstmal kein MOVW benutzt, er
die wihle Abfrage umständlicher lösst, er data nicht in X,Y,Z optimiert
und damit kein LD mit Postinkrement des Zeigers macht, er am Ende CRC
nach r25:r24 doppelt umkopiert ;)
Macht man es in Assembler so könnte es so aussehen:
Hallo Hagen,
vielen Dank für deine optimierungs Tipps.
Da der Algo zunächst ausschließlich unter Linux/PC laufen wird, ist das
mit dem Optimieren (solage es keine geliebte lib-Funktion wird) nicht so
extrem heilig.
Trotzdem sind deine Tipps für mich interessant da ich AVR-Seitig
tatsächlich viel mit dem AVR-GCC (allerdings auch hier unter Linux ;-))
arbeite.
Ich denke, dass die Umstrukturierung auch dem Linux-GCC auf die Sprünge
helfen wird (werde mir das mal anschauen).
Ich finde es toll, dass es offensichtlich doch noch Leute gibt, die sich
den Assembler-Output regelmäßig anschauen um unnötige Code-Mengen und
Laufzeiten gliech mal im Keim zu minimieren!
Ach ja das Tool läuft nun! Die Summe wird nicht nur einmal korrekt
berechnet ;-)
Da fällt mir noch eine kleine Frage ein:
Kann man mit dem Delphi-Tool in der Kommandozeile einzig nur das EE-Prom
schreiben und lesen jeweils über Hex-Dateien ohne dass das Flash
angefasst wird?
Das würde mir das Kompilieren des geschriebenen Tools in einer
Linux-Emulation unter Windows(mingw od. Cygwin) ersparen. Meine Versuche
haben immer dazu geführt dass immer das Flash mit programmiert wurde.
Nochmals vielen Dank für die Unterstützung!
Fabian
>Kann man mit dem Delphi-Tool in der Kommandozeile einzig nur das EE-Prom>schreiben und lesen jeweils über Hex-Dateien ohne dass das Flash>angefasst wird?
Müsste eigentlich gehen. Du musst als Flashfile dann einen Leerstring
angeben, zb. so
AVRootloader.exe -PCOM1 -B115200 -Dc:\test\ -EMy.EEP -F -Apc
Allerdings eben nur schreiben, das Lesen ist nicht vorgesehen. Diese
Funktion habe ich gleichmal in die ToDo Liste aufgenommen da ich
anscheinend diese Funktion übersehen habe einzubauen.
Du bist also an einem Linux Kommandozeilen Tool am schreiben. Wird dies
alle Funktionen meiner PC-Software umsetzen oder nur den EEPROM lesen
und schreiben ? Ich wäre nämlich daran interssiert das unter Linux alle
Funktionen des Bootloaders unterstützt werden.
Gruß Hagen
Hallo Hagen,
für meinen Anwendungszweck muss ich das EE-Prom auch lesen können(read
modify write).
Zunächst habe ich (auch aus zeitlichen Gründen) nur vor das EE-Prom zu
unterstützen (Funktional geht das aber derzeit nur mit 512Bytes auf nem
Atmega168 bei fixer Baudrate von 19200).
Da ich mit dem PortMon einfach nachgeguckt habe, was dabei abgeht und
erst dadurch step by step interpretiert habe was jeweils im einzelnen
passiert ist der erste Ansatz super quick n dirty... Allerdings bin ich
gerade etwas am Aufräumen und Umstrukturieren. Ein Update des Flashes
wäre eigentlich langfristig durchaus interessant auch für meinen
Anwendungsbereich.
Dann habe ich gestern Abend noch wxWidgets näher beleuchtet... da gibts
auch Designer dazu um Frontends zu "Malen".
Mein bisheriges GUI für den speziellen Anwendungsbereich ist noch in
GTK+ flach in C implementiert und kommuniziert nun über Dateien mit dem
Kommandozeilentool.
Meine zur Verfügung stehende Zeit ist aber (leider) eher Begrenzt, daher
ist es ungewiss wie weit ich da noch weiter komme.
Als Kommunikation mit der Seriellen habe ich mir den AvrDude Code
serial_posix.c genommen um schnell zum Zug zu kommen. Das passt aber
teilweise auch nicht so ganz in meine Vorstellung, funktioniert aber.
Für die Parameter wollte ich noch wenigstens "optarg" (eine lib)
einbauen um hier wenigstens etwas sauberer zu werden.
Gruß
Fabian
Hallo,
ich bekomme ab und an diese fehlermeldung,
nach 6-7mal versuchen geht es dann einwandfrei,
ich benutze bluetooth spp.
gruss rudolf.
> Connecting on port COM4...
> Device connected
> Program...
> execute compiled data
> selected options in compiled file:
> - programming FLASH
> - FLASH data are encrypted
> - erase FLASH during programming
> Cmd.SetAddr.ReadByte() ICOM: read error.
> Device disconnected
@Rudolf:
sieht nach Timing Poblemen aus. Da du über BT gehts und bisher du der
Erste bist kann man schwer konkrete Tipps geben. Der Bluetooth Stack
unter Windows ist ebenfalls so eine "Krücke" wie viele der USB-RS232
Treiber. Ich empfehle dir also mal die Werte in der AVRootloader.INI bei
[Timeouts] zu erhöhen. Anfangen mit dem Wert Base=50 und diesen mal auf
100 setzen.
Beim nächsten Mal bitte mehr Angaben posten, ist bischen dürftig deine
Fehlermeldung. Dazu erstmal in AVRootloader.ini [Timeouts] Options=1
setzen.
Diese Debugoption wird im Protokollfenster mehr Infos anzeigen lassen,
wie zb. auch die Baudrate, den AVR, ob 1-Wire oder 2-Wire usw. die du
benutzt und hier leider nicht verraten möchtest. Übrigens, da mit dieser
Debug-Option düfte jetzt seinen 50'zigsten Geburtstag feiern, also
zumindestens so oft wurde das hier im Thread schon besprochen ;)
Gruß Hagen
Bei mir lag's daran, dass der Quarz nicht recht anschwingen wollte und
daher keine vernünftige Reaktion vom µC kam.
Setzen der CKOPT-Fuse brachte Abhilfe.
Hallo Hagen,
jedes Kind bekommt neue Wünsche :-)
Siehst du irgendeine Möglichkeit, das Ganze auch über CAN zum Laufen zu
bringen? Ist leider die einzige Schnittstelle, die ich habe.
PC<->CAN-Dongle<->CAN-Bus<->MCP2515<->Mega32
CAN ist physikalisch RS485 ähnlich. RS485 wurde schon praktisch
umgesetzt. Das verbleibende Problem beim CAN wie auch zb. DMX ist die
Protokollschicht. Wenn du die Möglichkeit hast den "normalen
Protokoll-Betrieb" temporär zu deaktivieren und solang der Bootloader
arbeitet auch deaktiviert zu belassen, dann geht mein Bootloader relativ
einfach für diese Systeme anzupassen.
Ich empfehle immer folgende Vorgehensweise:
PC-Software möchte einen AVR flashen und sendet das AppCmd aus der INI.
Dieses AppCmd wurde als CAN/DMX etc.pp. Packet formatiert. Es aktiviert
in allen AVRs einen Silent-Mode. Dieser Mode deaktiviert das normale
Protokoll und bleibt solange aktiviert bis sich 2 Sekunden auf dem Bus
nichts mehr gerührt hat (automatische Umschaltung in den normalen
Protokollmode).
Wurde das AppCmd empfangen so starten alle AVRs ihren Bootloader.
Jeder AVR hat ein eigenes BootSign und auf das wird nur lesend im
Bootloader gewartet. Wurde das richtige BootSign empfangen startet der
eine AVR seinen Bootloader durch und übernimmt die Kontrolle über den
Bus. Alle anderen AVRs starten nach einem Timeout ihre normale
Applikation durch. Diese setzt ihren Receiver/Driversource bei einem
RESET in den Silent-Mode, warten also die 2 Sekunden Ruhe auf dem Bus
ab.
Mein Bootloader wird innerhalb von 2 Sekunden (WDT Timeout) solange er
connected ist immer irgendwas über den Bus senden. Dh. wurde 2 Sekunden
lang nichts über den Bus gesendet dann heist dies eindeutig das die
Connection getrennt wurde und der Bus wieder frei ist.
Ergo braucht man nur ein Start Kommando und das wäre in diesem Falle das
konfigurierbare AppCmd. Ein Stop Kommando ist nicht nötig durch den 2
Sekunden Timeout und dieser stellt auch sicher das sich nicht alles
irgendwie tot rennt, eg. blockiert.
Statt mit dem BootSign als eindeutige ID zu arbeiten geht das natürlich
auch mit zb. der CAN Node ID. In diesem Moment müsste aber das AppCmd
dynamisch um diese ID ergänzt werden so das nur die AVRs in ihren
CAN-Drivern den Bootloader starten mit der gleichen ID. Das würde eine
Änderung in meiner PC-Software bedeuten. Der erste Vorschlag würde nur
eine Änderung in deiner Applikationsoftware, eg. CAN Driver, bedeuten.
Wir gehen also von folgendem aus:
- AVRs haben schon deine Anwendung drauf
- Anwendung enthält einen CAN Driver
- CAN Driver hat einen Silent-Mode in dem er nur wartet bis der Bus 2
Sekunden still ist, danach akzeptiert er wieder CAN Packete
- CAN Driver wartet auf AppCmd Packete und startet Silent Mode und
Bootloader
- aus dem RESET startet die Anwendung den CAN Driver im Silent Mode
- AVRs haben lange und unterschieldiche BootSigns
- Bootloader und CAN benutzen gleiche Baudrate
Somit wird wenn es der PC-Bootloader signalisiert der komplette Bus
unter Kontrolle des Bootloader gesetzt und dann läuft darüber eine
einfache RS232/RS485 halbduplex Kommunikation.
Im Falle das auf dem AVR noch nicht deine Anwendung geflasht wurde wird
der Bootloader die ganze Zeit nur lauschend am Interface hängen. Bis er
das Bootsign empfangen hat. Also auch nur ein geringes Risiko von
Bus-/Protokollkonflikten.
Wie und ob das mit einem intelligenten CAN-Treiber geht kann ich nicht
beurteilen. Wichtig ist nur das er das AppCmd Packet erkennt, dann durch
AVR deaktiviert wird, er also alle Daten 1 zu 1 durchlässt.
Ich weiß das dies nicht der beste Vorschlag sein kann, aber es ist auf
jeden Fall der am einfachsten zu realisierende Vorschlag mit den
geringsten Änderungen. Besser wäre die PC-Software umzuschreiben und an
das jeweilige Protokoll anzupassen. Aber das bedeutet Aufwand und in
meinem Falle auch die nötige Hardware um das alles zu testen. Mal
abgesehen von meiner Zeit ;)
Gruß Hagen
Sehe gearde das der MCP2515 ein CAN->SPI Wandler ist. Das dürfte dann
schwieriger sein da die AVR Bootloader Software umgeschrieben werden muß
auf SPI statt RS232/RS485. Würde man ohne das CAN Protokoll, eg. Frames
und Packets, arbeiten können wäre diese noch relativ einfach möglich.
Denn dazu müsste man nur die Pin/Ports und UART Routinen getc/putc
umschreiben. Dh. sowas wäre dann wie bei einem UART->SPI Wandler Chip
der 1 zu 1 die UART auf SPI mappt.
Gruß Hagen
Hallo Hagen,
wäre es nicht möglich drei Funktionen im PC Programm zu schreiben
und als ByteIN, ByteOUT, RTS auszuführen, die dann exportiert werden ?
Dann könnte sich jeder eine DLL schreiben, die dann einfach die
Funktionen kurz vor der Hardware auf ein anderes Interface umbiegt.
Somit müsste man nichts mehr an der PC Software ändern ?
In der Anwendung hätte man dann
procedure DLLLoad();
function ByteIN(...) : Boolean;
function ByteOUT(...) : Boolean;
function RTS() : Boolean;
procedure DLLFree();
Somit könnte man auch den CAN-Bus mit relative kleinem Aufwand
programmieren.
Gruß Sven
@Sven:
ganz so einfach ist das leider nicht :(
Konzeptionell denke ich habe ich einen besseren Weg beschritten, der
auch die nötige Komplexität berücksichtigt. Wer es also möchte und ein
bischen Ahnung von ActiveX/COM/DCOM Interfaces hat kann die
AVRootloader.DLL benutzen. Mit ihr hat man nun die Möglichkeit ein
eigenes ICOM = Kommunikationsinterface vorzugeben. Dh. die komplette
Bootloader Protokollschicht ist weiterhin gekapselt und für das ICOM
Kommunikationsinterface existieren klar vorgegebene Schnittstellen die
man nur programmieren muß.
Grundsätzlich könnte schon jetzt ein anderer Programmierer über diesen
Weg deine simple DLL zusammenbauen.
Aber auch das wird im Falle des Problems CAN->SPI nicht wirklich viel
weiterhelfen. Denn grundsätzlich müssten alle Daten in Packete gekapselt
werden die mit den entsprechenden Headern versehen werden müssen. Diese
Kapselung der Daten und die Daten in deren Headern bestimmen an welche
CAN Node diese Packete adressiert sind.
Es muß, wenn man es wirklich richtig machen möchte, das komplette
Bootloader Protokoll neu geschrieben werden. Sowohl die PC-Software wie
auch AVR Software.
Das was bei deinem Vorschlag und meiner AVRootloader.DLL nämlich fehlt
ist das Kenntlichmachen wann ein solches Packet beginnt und endet. Denn
nur so könnte die externe DLL oder eben das custom ICOM Interface im
AVRootloader.DLL auf Protokollebene erkenne wann ein Header mit
Adress-/Datengröße Angaben zu erzeugen ist und wann ein Packet zu Ende
ist und mit einer CAN/DMX Prüfsumme zu versehen ist.
Nun kommt noch das Problem hinzu das die maximale Packetgröße ebenfalls
vom Protokoll abhängig ist. Das könnte dazu führen das ein Datenblock zu
groß für das Protokoll ist und dann transparent durch das ICOM bzw.
deine DLL in kleinere Packete zerstückelt werden muß. Auch hier muß man
dann dynamisch Header/Prüfsumme davor/danach einbauen.
Schlußendlich ein Weg der die Sache nicht vereinfacht sondern
verkompliziert im Vergleich zu einer Lösung die direkt die AVR Sourcen
und PC Sourcen und Protokoll direkt verändert.
Ich denke für ein Hobbyprojekt hat sich mein Bootloader in eine relativ
universelle und professionelle Richtung weiterentwickelt. Irgendwan
kommt man aber an einen Punkt der auf Grund der ehemaligen Konzeption
nicht mehr überschritten werden kann, bzw. es keinen Sinn macht noch
weiter zu gehen. Nun CAN-SPI wäre wohl dieser Punkt.
Wenn es die packetbasierte und adressierbare Protokollschicht nicht gäbe
wäre auch die Änderung auf SPI/I2C usw. im AVR Bootloader Source noch
einfach umzusetzen. Solange die physikalische Verbindung RS232/485
konform und auf PC-Seite ein Mapping vom virtuellen COM Port zu einem
physikischen Dongle existiert ist das alles noch in einem vertrettbaren
Aufwand von 1-2 Tagen umsetzbar.
Nur mal zusammenfassend was schon an Protokollen geht:
* 1- oder 2-Wire in nachfolgenden Varianten
* RS232, RS485, USB-RS232, USB-RS485, Bluetooth-RS232, TCP/IP-RS232,
TCP/IP-RS485, DMX
* alles mit oder ohne Pegelwandler, also physikalische oder logische
Pegel
Damit werden allen wichtigen RS-Schnittstellen unterstützt und das
verifiziert.
Selbst IRDA müsste schon gehen.
Gruß Hagen
Theoretisch geht das auch über CAN Byte für Byte, man müsste eben für
jedes Byte einen kompletten Frame schicken. Sinnvoller wäre es, die
messages auch mit 8 Byte zu füllen.
Die Hardware-Protokollschicht zu umgehen, ist unmöglich (behaupte ich
jetzt mal)
Tja, habe mir schon gedacht, dass das aufwändiger wäre :-).
Ich werde mir wohl selber bisschen was tricksen, nur mit der
notwendigsten Funktionalität.
Ist eh nur ein Notausgang, da die ganze Baugruppe komplett vergossen
ist. Eigentlich ist die Software fertig, aber man kennt das -
irgendwann findet man doch einen Bug oder eine neue Funktion, die noch
rein soll....
Mal schauen.
>Die Hardware-Protokollschicht zu umgehen, ist unmöglich (behaupte ich>jetzt mal)
Das hängt eben von der Hardware ab. CAN ist RS485 kompatibel und wenn
der CAN Controller in der MCU als Software implementiert ist dann würde
mein obiger Vorschlg auch gehen, denke ich mir so ;) So fit bin ich im
CAN auch nicht, was ich aber in den par Minuten überlesen habe deutet
darauf hin.
Das grundsätzliche "Problem" meines Bootloaders ist dann eben die
Umsetzung in Assembler. Das schränkt die Portierbarkeit eben ein. Aber
das war konzeptionell auch nicht so vorgesehen und in der
Prioritätenliste war die Kompaktheit des Bootloaders viel wichtiger um
möglichst alle programmierbaren AVRs auch unterstützen zu können. Ein
komplexeres Protokoll verbraucht auch mehr Resourcen oder ist von
spezieller Natur und nicht mehr breitbandig von vielen Usern nutzbar,
ist einfach so. Zweitens kommt der Punkt hinzu das ich meine PC-Sourcen
nicht frei verfügbar machen möchte. Das hat nichts mit "auf den Sourcen
hocken" zu tun sondern ist aus meiner Sicht auch ein "Erfolgsgeheimnis"
warum dieses Projekt überhaupt funktionieren kann. Irgendwann werde ich
diese Sourcen rausgeben und somit die Verantwortung der Pflege und
Weiterentwicklung abgeben. Aber meine Erfahrung sagt mir das solche
Projekte die möglichst sauber und schnell weiterentwickelt werden sollen
immer eine zentrale Führungsperson benötigen. Das ist ja das Problem mit
den vielen OpenSource Projekten die an ihren administrativen Plänkeleien
dann schlußendlich im Chaos geendet sind. (egal ob Software oder
Hardware Entwicklungen, beste Beispiele lassen sich sogar hier im Forum
finden ;)
Gruß Hagen
CAN in Software - das macht keiner freiwillig, dürfte auch schnell an
die Grenzen des überhaupt machbaren kommen, vielleicht funktioniert es
bei sehr kleinen Bitraten. Da denke ich gar nicht drüber nach.
Ich werde die CAN/SPI-Routinen in den Bootbereich packen und die nach
einer Prog-Message anspringen. Und dann gibts für jedes Byte einen
Frame, beinhaltet Adresse im Flash und Datenbyte. EEprom brauch ich
nicht (bzw. kann ich das in der der "normalen" CAN-Kommunikation)
>CAN in Software - das macht keiner freiwillig, dürfte auch schnell an
So meinte ich das nicht. Eher in Richtung CAN-Hardware ist in der MCU
und kann konfiguriert werden, extern RS485 Bus.
>Ich werde die CAN/SPI-Routinen in den Bootbereich packen und die nach>einer Prog-Message anspringen. Und dann gibts für jedes Byte einen>Frame, beinhaltet Adresse im Flash und Datenbyte. EEprom brauch ich>nicht (bzw. kann ich das in der der "normalen" CAN-Kommunikation)
Hier würde ich die Packetgröße auf die Größe pro FLASH Page oder eben
zur Verfügung steheden SRAM Buffer hochsetzen. Alles andere bringt mehr
Overhead für das Packethandling und reduziert die performance drastisch.
Das Adresshandling wird zb. in meinem Protokoll ebenfalls separiert. Dh.
es gibt einen interen Adresszähler der mit eigenem Kommando gesetzt wird
und ansonsten bei den jeweiligen Programmierfunktionen für
FLASH/EEPROM/SRAM lesen/schreiben automatisch inkrementiert wird.
Das Mischen von Bootloader- und Anwendungscode erachte ich ebenfalls für
nicht ganz so gut. Normalerweise sollte der Bootloader eigenständig zur
Anwendung funktionieren und so wenig wie möglich spezielle Hardware
Feature benutzen. Zb. IQRs verkomplizieren den Bootloader drastisch.
Aber gerade IQRs sollten in der Anwendung für die Kommunikation benutzt
werden.
Ich würde daher in der Anwendung einen egenen CAN Driver mit IQRs und
Buffering benutzen. Dieser reagiert dann auf einen Bootloader Frame
indem der Bootloader gezielt gestartet wird. Dieser wiederum arbeitet
ohne IQRs per Polling oder wenn mit IQRs dann mit seinen eigenen und
nicht den der Anwendung.
Baust du den Bootloader so das er mit den IRQs der Anwendung arbeitet
dann hast du die komplette Funktionalität der geschützten Bootloader
Sections ebenfalls deaktiviert. Dh. dein Bootloader ist nur noch ein
Subsystem deiner Anwendung und jedesmal wenn sich gravierende Sachen in
deiner Anwendungssoftware verändern, IRQs usw., ist der schon
installierte Bootloader inkompatibel.
Gruß Hagen
Hallo Hagen,
zuerst mal meine Hochachtung vor den Details und Features
den Du ja schon in der ganzen Lösung eingebaut hast.
Zurück zu der CAN Geschichte:
Während ich dies schreibe enwickelt sich mein eigener Vorschlag zu
nonsens.
Man braucht doch nur ein eigenes Gateway bauen, welches
nur RS232-CAN übersetzt. Damit läuft die ganze Applikation
und der Bootloader transparent. Am Gateway stellt man dann
eine Zieladresse ein und ein Reset Kommando o.ä. kann
durch Dein Interface erfolgen. Das spezielle Kommando kann
ja durch die normale Applikation im AVR implementiert sein
und den Bootloader Modus aktivieren, wie Du es vorgesehen hast.
Dann braucht man nur den Assembler Code etwas für die CAN
Unterstützung anfassen und das Gateway bauen.
Gruß Sven
@Sven:
ansich wird das auch so gemacht, denoch
>Dann braucht man nur den Assembler Code etwas für die CAN>Unterstützung anfassen und das Gateway bauen.
dieses "etwas" ist es was mich stört ;) Der Bootloader ASM Source
erzeugt so kompakten Code das dieses "Etwas" an Änderungen schon ne
ganze Menge sein wird. Das Bootloader Protokoll ist eben auch Timing
abhängig, zb. Baudrate Detection, Connection Aufbau, Responsezeiten beim
FLASH/EEPROM programmieren usw. Ein Packetorientiertes Protokoll nimmt
man immer dann wenn diese exakten Timings nicht erforderlich sind und
der Schwerpunkt auf Multiclients/server/host liegt. Dies ist
konzeptionell ja bei meinen Bootloader (PPP) eben nicht so.
Der Gateway müsste nun eigenständig entscheiden können wo er Datenbytes
erstmal in Buffern sammelt und dann den Frame drumherum bauen kann und
wo er einem strikten Timing unterworfen ist und sofort auch kleinere
Packete schnüren muß. Das geht ohne zusätzliche Infos von der
PC-Software eben nicht. Wenn du hier den Thread verfolgt hast dann wirst
du sehen das es größtenteils Timingprobleme sind. Wenn man also zb. den
Startup des Bootloaders gezielter per Events oder eben zeitlich
toleranter gestalten könnte wären dort weniger Probleme zu erwarten. Da
er aber aktuell einer anderen Konzeption unterliegt, nämlich maximal nur
250ms auf einen Connect zu warten, ergeben sich eben gewissen
Timinganforderungen. Das wäre nur ein Beispiel, ein weiteres wäre zb.
das es ~4ms dauert eine FLASH-Page zu programmieren, die PC-Software nun
ihrerseits weiß wieviele Pages programmiert werden müssen (auf Grund der
vorher gesendeten Daten) und nun ihre Timeouts entsprechend setzt um
einen flüssigen Ablauf und möglichst schnelle Programmierzeiten zu
bekommen.
Ergo ist meine Meinung das bei einem packetorientierten Protokoll sich
auch der konzeptionelle Aufbau sowohl der PC-Software wie auch AVR
Source stark verändert und es besser wäre dann gleich was Neues zu
stricken. Nicht das es mit einer "Krampflösung" nicht funktionieren
könnte aber effektiv betrachtet investiert man weniger Zeit und Nerven
gleich von Anfang an bei der Neuentwicklung solche Anforderungen auch zu
berücksichtigen.
Finally: ich meine das der jetzige Bootloader nicht dafür geeignet ist
und es sich auch nicht lohnt diesen in diese Richtung weiter zu
entwickeln. Davon abgesehen werde ich nicht bereit sein meine Zeit dafür
zu opfern.
Gruß Hagen
Geht nicht und ist Absicht. Die PC-Software benötigt bestimmte Angaben,
wie AVR Signatur und installierte Bootloaderversion um das ACY File
daraufhin kompilieren zu können. Angedacht war das nach der Kompilation
bei der Verschlüsselung auch noch live überprüft wird ob das Passwort
stimmt (wurde aber nicht implementiert da ein Angreifer so eventuell
durch Trial&Error das Passwort durchprobieren könnte).
Wenn man das offline machen wollte so müsste die PC-Software die AVR
Signatur, Bootloaderversion und Bootloadergröße per GUI beim Benutzer
abfragen.
Es ist also von der Arbeitsweise immer so vorgesehen das der Entwickler
ein aktuelles Gerät/Hardware vor sich hat und sein kompiliertes ACY auch
gleich tested.
Gruß Hagen
Danke, Hagen!
Ich muß die verschlüsselte file ohne angeschlossen MCU generieren. Allen
notwendig gegeben (passwort, signatur und dgl.m.) weiß ich und ich kann
manuell einsetzen. Ob eine solche Möglichkeit existiert?
Hallo Hagen,
Erstmal grosses Danke!
richtig genial der loader.
Jetzt bräuchte ich noch genau sowas für den ATXMEGA128A1. Weiter oben
hattest du glaub ich schonmal den Prozessor erwähnt. Gibt es da schon
was konkretes?
Viele Grüße,
Rolf
Hallo,
da ich ein entsprechendes Bootloader UI für Ubuntu brauchte, habe ein
Programm geschrieben, welches den hier beschriebenen Bootloader bedienen
kann. Es kann bis jetzt nur den Flash programmieren. Dies allerdings mit
verschlüsselten .acy und unverschlüsselten .hex files. Außerdem wird
auch nur der ATmega8 unterstützt. (Es wird aber nicht überprüft ob sich
um einen solchen handelt.) Wahrscheinlich strotzt es vor Bugs.
Allerdings funktioniert das Programmieren von einem Ubuntu 9.4 System
aus.
Das Programm ist mit Lazarus geschrieben und lässt sich entsprechend
auch wür win kompilieren.
Wenn man es mit den Parametern bootloader -nogui -tty -bd -file aufruft,
kann man es auch normal über Kommandozeile aus zb der makefile heraus
starten.
Ich dachte, dass vielleicht auch andere Interesse haben an dem Programm.
Viele Grüße,
piowux
@Hagen:
ja, ich kann mich ARV (Gast) nur anschließen. Es wäre klasse, wenn man
das .acy file direkt ohne anschließen des AVRs generieren könnte. Bei
mir hat das den Hintergrund, dass dein Programm unter Linux und Wine
zwar läuft, aber die serielle Schnittstelle halt nicht angesprochen
werden kann.
Für das Programmieren habe ich ja jetzt ein Programm. Nur das Erzeugen
der acy Datei ist nicht möglich. Ich würde ungern immer die Virtual
machine starten, nur um eine acy Datei zu erzeugen.
Vielleicht kann man das ein bisschen absichern, indem man die Bootinfo
aus einer Datei liest, deren Zeitstempel nicht zu alt ist? So ist dann
wenigstens halbwegs sichergestellt, dass der entsprechende Chip
vorliegt.
Gruß,
piowux
@Arne:
Ich wäre sehr daran interessiert wenn deine bisherige Arbeit weiter
perfektioniert würde. Melde dich bitte bei mir per PN und wir können
dann besprechen wie ich dich besser unterstützen kann (Sourcen usw.).
Zum Problem "offline ACY":
Ich habe es mal in meine Todo Liste aufgenommen. Es bestehen drei
Lösungen für dieses Problem. Per GUI wählt man AVR, Bootloader Größe
etc.pp. vor der Compilierung aus. Drückt man also auf den Compile Button
erschiene ein Dialog. In diesem Auswahlelemente für die fehlenden Daten
die auch automatisch von einem connected Device befüllt werden können.
Alternativ dann von einem AVRootloader.asm, also dem aktuellen Source
des Bootloaders, geparst werden können. Dieser Dialog eröffnet also die
Möglichkeit entweder manuell, automatisch aus verbundenen Device oder
ausgelesen aus einem AVRootloader.asm alle Parameter zu setzen. So würde
ich mir diese Änderung vorstellen damit ich mit diesen Änderungen und
dem verbundenen Aufwand gleich mehrere Fliegen mit einer Klappe
erschlagen kann (lohnt ansonsten ja nicht). Ist halt bischen Arbeit da
ich einiges am Basic Code verändern müsste, mal schauen.
Demnächst wollte ich sowieso noch ein weiteres Feature einbauen (merge
zweier HEX Files um Bootloader HEX und App HEX in einem Rutsch
programmieren zu können).
Gruß Hagen
@Arne:
Habe mir mal deinen Source angeschaut. Weist du ob Lazaraus auch
Interfaces unterstützt ? Wenn ja dann wäre es doch viel besser wenn du
mein Interfaces Source gleich direkt benutzt da ich meine das dieser
portierbar nach Lazarus sein müsste. Dieser Source beinhalted alles
ausser dem GUI. Dh. die komplette Protokollebene und Kommunikationsebene
wäre fast fertig. Fehlte nur noch das GUI und das wäre Fleißarbeit. Ich
habe versucht möglichst Delphi VCL und Windows API entfernt zu arbeiten
(geht bei den Kommunikationsinterface natürlich nicht so einfach).
Gruß Hagen
Hallo zusammen!
Zuerst möchte ich mich für den tollen Bootloader und die darin steckende
Arbeit bedanken!
Allerdings habe ich jetzt ein seltsames Problem und könnte ein bisschen
Hilfe gebrauchen.
Zunächst (am Dienstag) habe ich den Bootloader für 1-Wire Betrieb mit
nicht invertiertem Uart für einen Mega8 (8MHz, Autobaud, nicht
verschlüsselt) kompiliert und auf den Controller geflasht. Zum
Programmieren habe ich die Schaltung aus dem beigefügten Bild verwendet,
direkt an eine echte RS232. Die Dioden waren BAT46, als Widerstand habe
ich 3k3 verwendet, da grad kein 2k7 verfügbar war.
Zwei Mega8 konnte ich so problemlos (auf jeweils verschiedenen Pins)
ansprechen und flashen. Zugriff aur Ram/EEprom ging auch (nachdem ich
dann die BOOTRST Fuse programmiert hatte)
Am nächsten Tag wollte ich dann auch einen Mega32 mit Bootloader
ausstatten, allerdings reagierte er nicht auf die Verbindungsversuche.
Zunächst dachte ich an ein Problem mit dem Controller, egal ob Software-
oder Hadrwareseitig, also hab ich nochmal die M8 vom vortag angeklemmt.
Hier tat sich diesmal aber auch nichts, egal mit welcher Baudrate ich es
versucht habe.
Danach hatte ich befürchtet, dass es die Schnittstelle erwischt hat,
darum habe ich im Terminal getestet, ob gesendete Zeichen am Eingang
wieder reinkommen. Schnittstelle OK.
Mein nächster Verdacht war, dass das Windowsprogramm aus irgendeinem
Grund nichts mehr sendet. Das habe ich dann mit dem Oszilloskop auch
ausschließen können. Sauberer +-12V Hub.
Mit dem Programmieradapter am AVR Pin sieht man das gleiche Muster,
allerdings eben im Bereich von 0-5V und mit nicht ganz so steilen, bzw.
etwas verrundeten steigenden Flanken.
So langsam gehen mir jetzt aber die Ideen aus, was noch falsch laufen
könnte. Hat jemand eine Idee?
Falls das hilft könnte ich versuchen, das Oszillogramm auf den Rechner
zu kriegen und hochzuladen.
Gruß,
Timo
Hallo Timo,
ich hatte auch Probleme mit dem mega32 (siehe weiter oben), allerdings
nicht one-wire.
Das Setzen der CKOPT-Fuse brachte das Teil zum laufen, evtl. geht das
bei dir auch?
Hallo Thilo,
CKOPT Fuse ist bereits gesetzt, hat bei mir aber leider keine
Veränderung gebracht.
Am meisten wundert mich bei der ganzen Sache ja, dass es mit den Mega8
am Anfang funktioniert hat.
Ändere mal in AVRootloader.inc den Wert bei BaudTolerance von 3 auf zb.
5 oder höher. Je nach MCU-Takt und ausgewählter Baudrate ist die
Baudraten Toleranz von 3 zu optimistisch gewählt. Mein aktuelles Projekt
hatte damit Probleme, tratt hier also zum ersten Mal als Problem auf,
und eine Änderung auf 5 beseitigte es.
Gruß Hagen
Ich erhalte seit einigen Tagen auf einmal diese Fehlermeldung beim
Upload von Firmware:
15.08.09-10:49:30-578 > Connecting...
15.08.09-10:49:30-703 > Switch to 2-Wire mode
15.08.09-10:49:32-140 > Device connected
15.08.09-10:49:32-140 > Program...
15.08.09-10:49:32-234 > execute compiled data
15.08.09-10:49:32-234 > selected options in compiled file:
15.08.09-10:49:32-234 > - programming FLASH
15.08.09-10:49:32-234 > - FLASH data are encrypted
15.08.09-10:49:32-234 > - erase FLASH during programming
15.08.09-10:49:32-234 > - full verify FLASH after programing
15.08.09-10:49:32-328 > Cmd.SetAddr.ResCheck() Error: Invalid checksum
15.08.09-10:49:32-328 > Device disconnected
Bisher ging es immer problemlos. Das komische ist: Meine eigene Software
mit der DLL geht problemlos, nur die Avrootloader-Windows-Software gibt
diese Meldung aus. Was könnte das bloß sein?
Louis
Schwer zu sagen. Benutzt du das Versioning ?
Probiere doch erstmal ohne Verify zu arbeiten und schaue ob der Fehler
dann immer noch passiert.
Gruß Hagen
15.08.09-10:49:30-578 > Connecting...
15.08.09-10:49:30-703 > Switch to 2-Wire mode
15.08.09-10:49:32-140 > Device connected
Das deutet auf eine alte Bootloader Version hin. Installiere bitte die
neuste Version 6.
Erkennen kannst du das daran das er explizit auf 2-Wire-Mode umschaltet.
Das hat die ältere Version so gehandhabt, die standardmäßig auf 1-Wire
eingestellt ist und beim Verbindungsaufbau erkennt das 2-Wire vorliegt.
Die neue Version (ab Version 4 glaube ich) geht exakt andersherum vor.
Standardmäßig 2-Wire und erkennt bei Bedarf 1-Wire.
Gruß Hagen
Hallo Hagen,
versioning verwende ich nicht, ich habe einen Bootsign gesetzt um die
verschiedene Hardware zu unterscheiden.
Die neueste Version zeigt dieselbe Meldung...
Ich habe nichts verändert, flashe die Datei schon seit Monaten. Ist
schon seltsam, zumal es über die DLL geht.
Louis
Hallo Hagen,
danke für deinen exzellenten Bootloader!
Ich brauche eine zusätzliche Möglichkeit bei zwei gleichzeitig
gedruckten Tasten am Gerät bei einschalten Bootloader starten.
Nur Assembler gehört nicht zu meinen Stärksten…
Tasten Abfrage habe ich so realisiert:
...
.include "AVRootloader.inc"
;.listmac
.list
.org BootStart
init: cli
;-----------------------------
.def tmp = r28
.def tmp1 = r29
ldi tmp, $00
out DDRA, tmp ;PORTA als Eingang
ldi tmp, 0b11111100
out PORTA, tmp ;PullUp
in tmp, PINA
andi tmp, 0b10001000
ldi tmp1, 0b10001000
eor tmp, Tmp1
ldi tmp1, 0
cpi tmp, 0b10001000
brne NoButtons
ldi tmp1, 1 ;wenn gedruckt, immer auf PC warten (tmp1=1)
NoButtons: ;sonst starten wie immer
;-----------------------------
clr zerol
.if Use1Wire
u.s.w….
Frage:
was soll ich am Besten ändern und, wenn möglich, wie?
ich verwende "fixed baudrate, identifier scanning with timeout"
also in dem Fall timeout soll unendlich dauern?
Hochachtungsvoll
Vladimir
Nachfolgend die zwei Stellen im ASM die du änderst:
1
check: xwdr
2
sbrs PIND, PD0
3
sbrc PIND, PD1
4
rjmpapp
5
6
; baudrate and identifier scanning
7
.if UseResetDelay
8
abd:
9
.endif
10
11
...
12
...
13
14
; identifier (BootSign) scanning with timeout and checksum
15
16
id1: sbiw xl, 1 ; UART getc with timeouts
17
sbc cmdl, zerol
18
rx_1
19
brne id1
20
id2: breq check; exit
21
id3: sbiw xl, 1
22
sbc cmdl, zerol
23
rx_0
24
brne id3
25
breq check; exit
26
rcall getx
27
...
28
...
Bei Label check:
- Watchdog, falls eingeschaltet, zurücksetzen
- beide Pins abfragen, hier low-active
- wenn nicht beide gedrückt mit jmpapp die Anwendung starten
danach normale Baudrate Detection und BootSign Detection. Falls eines
davon fehlschlägt Sprung nach Label Check: statt Label Exit:
Deine Tasterpins sollten per internem Pullup arbeiten und nach GND
gezogen werden. Falls es nicht so ist musst du die sbrs/sbrc Abfragen
umdrehen.
Wenn nicht beide Tasten gedrückt sind startet sofort deine Anwendung.
Solange beide Tasten gedrückt sind wird auf einen gültigen Connect
gewartet, ohne Timeout oder Watchdog RESET.
Gruß Hagen
PS: ich habe das jetzt nicht getestet sondern hier live eingetippt.
Bedenke das mit deiner Lösung du mit beiden gedrückten Tasten in die
Baudrate/Bootinfo Schleife reinkommst aber nur mit einem Connect oder
eben RESET wieder raus. Bei meinem Vorschlag bleibt der Bootloader so
lange in dieser Schleife wie entweder beide Tasten gedrückt sind oder
ein Connect erfolgte. Dh. ist der AVR noch in dieser Schleife, also ohne
gültigem Connect, und werden die Tasten losgelassen so startet die
installierte Anwendung.
Gruß Hagen
Du hast recht. Aber genau das war mein Ziel. In einigen Fällen beim
Update passieren unerwünschte Fehler. Dann weiteres Update ist nicht
möglich. Hauptprogramme existiert nicht mehr und Kunde kommt nicht in
Bootloader. Jetzt, wenn so was passiert, Kunde trotzdem hat Möglichkeit
Bootloader starten.
Hallo Hagen,
Dein Bootloader ist echt super.
Habe ihn schon bei meheren Geräten eingesetzt.
Jetzt will ich ein Konsolenprogramm für Linux schreiben.
Habe in diesem Thread gelesen das jemand schon mal angefangen hat.
Will das ganze in C schreiben. Vielleicht später auch mal eine einfache
GTK Gui. Aber Vorrang hat erst mal das Konsolenprogramm.
Könntest du mir dafür die nötigen Infos geben wenn es geht.
MFG Alex
Hi Hagen !
Genialer Loader, sehr schnell !
Ich verwende Bascom, kann dort die AVRootloader.exe als
Programmer einbinden. Übergeben wird dann :
AVRootloader.exe -PCOM1 -B115200 -SBOOTLOADER -DD:\Projekte\GPS\gps3dec\
-F{FILE} -Aepc
Für {FILE} setzt Bascom dann GPS.hex automatisch ein.
Wenn ich nun auf "Flash" klicke startet der AVRootloader und
löscht den Flash des Atmels. Danach sollte er dann ja den
Flash programmieren, aber das macht er nicht. Ich muss per
Hand auf "Program" klicken, dann flasht er artig den Chip.
Mit der Option -Aepc sollte er aber doch den kompletten Vorgang
automatisch ausführen, oder? Mache ich da was falsch ?
Matthes
probiere mal -Apc, der Bootloader wird dann so flashen als wäre die
Checkbox "erase during programming" angehackt. Es kommt letztendlich
auf's Gleiche raus nur eben mit dem Unterschied das es mit dieser Option
schneller ist.
Denoch sollte er alle Kommandos auch ausführen wenn sie als Parameter
angegeben wurden. Entweder mal wieder einen Bug eingebaut oder die
interne Funktion .DoEraseFlash() gibt einen Fehler zurück. Sobald eine
der angegebenen Parameter einen Fehler auslösst wird der komplette
Vorgang der Auswertung der Parameter abgebrochen.
Gruß Hagen
@alex,
hier im Forum anmelden dann kannst du auf einen Link neben meinem Namen
klicken und mir eine PN schicken. Ich antworte dann auf die EMail und
schon können wir kommunizieren.
Gruß Hagen
Grüß Hagen!
Erst Riesige "Danke Schön" für deinen Bootloader, ist einfach Klasse.
Nun mein Problem:
Ich verknupfe deine DLL V2 mit eigener Anwendung, ich möchte EEPROM
auslesen mit Function ReadEeprom aus dem AVRootIntf und dann in einem
File speichern. Aber BufOut ist immer leer. Was mache ich falsch?
Hier ist eine Stück vom Code
procedure TForm1.Button8Click(Sender: TObject);
var
EBuffer: pointer;
BufOut : array of byte;
begin
SetLength(BufOut,64);
EBuffer := Addr(BufOut);
FNameEEPROM := ExtractFilePath(ParamStr(0)) + 'temp1.eep';
if FLoader.Mode = moDisconnected then FLoader.DoConnect;
if FLoader.Command.ReadEeprom(EBuffer, 64) then
begin
Hex_File_Write;
end;
if FLoader.Mode = moConnected then FLoader.DoDisconnect;
end;
1.) Codeschutzblöcke mit try finally end
2.) DoConnect(), DoDisconnet() kann rekursiv benutzt werden, wichtig ist
nur für jedes erfolgreiche DoConnect() muß ein DoDisconnect()
aufgerufenw werden, ergo Punkt 1.) Schutzblock einrichten
3.) try except Block, du bist der On-Top-Caller und damit der
On-Top-Fehler/Ausnahmen-Behandler
4.) Niemals Addr() verwenden, obsolete. Wenn dann mußt du bei
dynamischen Arrays -> das sind Zeiger auf Records die Zeiger auf Daten
enthalten, das erste Datenelement mit Addr() ermitteln. Also zb.
Addr(Buffer[0]) kurz geschrieben also @Buffer[0]. Das dynamische Array
könnte ja auch mehrdimesional sein.
5.) Aktionen, also vorbereitender Programcode immer nur zum Zeitpunkt
ausführen wenn er nötig ist
Gruß Hagen
Hallo Hagen,
ich möchte mich für den Bootloader und die umfangreiche Doku bedanken.
Ich bin recht neu im Thema AVR unterwegs. Gestern habe ich es geschafft,
den Loader erfolgreich auf einem Mega 8 zu installieren. Ich habe
Anfangs etwas Probleme gehabt, da ich nicht wusste, dass bei einem MAX
232 und bei meinem USB Seriell Wandler mit Atiny 2313 (ist auf dem Board
von Ulrich Radig drauf) das UART Siganl umgekehrt werden muss.
Aber jetzt geht es, somit kann ich nun auch meinen 666p in Angriff
nehmen.
Also, vielen Dank für Deine Arbeit, und dafür, dass Du dies alles
öffentlich stelltst.
Gruß
Christian
Hallo Hagen,
ja, ich habe den Kommentar dann auch gesehen. Ist also wirklich sehr gut
dokumentiert, nur lesen muss man(n) alles :-))
Beim 666p habe ich mich vertippt muss nachtürlich ein 644p sein.
Gruß
Christian
Hallo Hagen,
tolles Projekt, tausend Dank für Deine Arbeit!!!
Ich würde gerne in Delphi eine kleine App zu Deiner DLL schreiben, mit
der ich dass EEProm modifizieren kann (lesen/schreiben), aber leider
krieg ich keinen connect.
Wenn ich bei GetAppCmdResponse '' zurückgebe, geht die Anwenndung baden
und meldet irgendwann zuviel Exeptions "Integer divide by zero
at0x0037c8e2". Wenn ich ' ' zurückgebe geht das zwar gut aber Connect
hab ich trotzdem nicht.
Ich bräuchte das Verhalten der AVRootloder.exe, die ja auf Reset meines
ATTiny wartet.
Wäre toll, wenns einen Tip gäbe.
Hallo Hagen,
herzlichen Dank für dein tolles Projekt, leider habe ich nich gewisse
Startschwierigkeiten...
Es tut mir leid dich trotz der umfangreichen Doku damit zu behelligen.
Folgender Aufbau:
Ein Atmega644 mit max232 an D0 un D1 angeschlossen.
.include "m644Pdef.inc"
.equ UseWDR = 1
.equ UseAutobaud = 1
.equ UseVerify = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseSRAM = 0
.equ UseCrypt = 1
.equ UseCryptFLASH = 1
.equ UseCryptE2 = 1
.equ UartInvert = 1
.equ RX_PORT = PORTD
.equ RX = PD0
.equ TX_PORT = PORTD
.equ TX = PD1
.set XTAL = 8000000
.set BootDelay = XTAL/4
BootCodeSize habe ich gesetzt.
Compilieren und flashen hat ohne Probleme geklappt.
Fuses:
SPIEN gesetzt
BootFlash size=512 words Boot start address=$7E00
BOOTRST gesetzt
sonst alles aus.
Leider meldet mir AVRootloader immer "Error: no Device found".
Angeschlossen ist das ganze an einen Com am Mainboard.
Die Taktquelle ist der interne 8MHz Oszillator. Kann der zu ungenau
sein?
Ich kann übrigens mit HTerm Daten vom Controller empfangen.
Hat vielleicht jemand eine Idee was das Problem verursacht?
Vielen Dank,
Manuel
1. BootCodeSize auf 0 setzen
2. neu kompilieren
3. BootCodeSize auf Wert aus AVRStudio setzen
4. neu kompilieren
5. schaue im Messsagewindow von AVRStudio nach welche Boot Fuses du
setzen sollst
6. flashen
7. Fuses setzen
Takt kann nicht das Problem aus Sicht des Bootlloaders sein da du die
AutoBaud benutzt, das sollte ausreichend kurzzeit stabil sein.
- neuste Version ?
- AVRootloader.INI alles richtig ?
Gruß Hagen
Hallo,
danke fuer die schnelle Antwort.
1-4 habe ich gemacht,
5: Please program Boot Fuse to First Boot Start !
Welche ist das? Die einzige die mir AVRStudio in diese Richtung anbietet
ist BOOTRST, welche auch gesetzt ist.
Version sollte passen, 6.0; habe das letztmoegliche hier aus dem thread
gezogen.
In der ini habe ich testweise
ConnectTrials=30
Connect=100
gesetzt; Sonst unveraendert gelassen.
Vor dem Compilieren habe ich noch make password ausgefuehrt und
gespeichert.
Gruss Manuel
Es gibt first, second, third und fourth Bootstart ;)
in AVRStudio gibt es eine DropDown Auswahl mit, na rate mal, vier
Einträgen.
Wenn also zb. second Bootstart gemeint ist dann stellt man in dieser
DropDown Liste den 2. Eintrag ein.
Ansonsten sieht alles richtig aus nach deinen Beschreibungen.
- COM Port in Windows Anwendung richtig ?
- das BootSign richtig eingestellt ?
- hast du mal die Debug Option probiert und dir dann das Protokoll
angeschaut ?
Gruß Hagen
> "Error: no Device found"
Diese Meldung kann eigentlich nur kommen wenn der COM Port auf AUTO
steht. Setze den COM Port auf den an dem der AVR dran ist und probier
dann einfach den Connect Button. Die Software verbleibt dann so lange im
Connect bis du es manuell abbrichst.
Gruß hagen
Ja, mit den ComPort Einstellungen habe ich schon gespielt, leider ohne
Erfolg.
BOOT-Sign habe ich gelassen wie es war (BOOTLOADER).
Das Message Fenster bleibt stumm, auch bei Debug=1 in [System].
Kann es sein, dass es an meinem Port am PC liegt?
Mir ist frueher schon aufgefallen, dass HTerm empfangene Zeichen nur
blockweise anzeigt, da scheint irgendein Puffer im Spiel zu sein.
Vielleicht ist das sendeseitig genauso?
Waere super wenn das doch noch laufen wurde.
Viele Gruesse und schoenes Wochenende,
Manuel
Hallo,
ich habe ein Problem.
Ich habe den Bootloader auf einen Atmega8 aufgespielt (ja ich habe das
richtige Include ausgewählt). Nach viel Probieren bin ich nun soweit,
dass ich über die Software Connecten kann. Jedoch heißt es bei Device
name, es sei ein ATtiny87.
Ich habe dann versucht, aus dem Tut das erste Beispiel aufzuspielen.
Aber das Programm (AVRootloader 6.0) sagt, es fehlt ein RJMP to MAIN
oder sowas.
Gerade ist ein neues Problem aufgetaucht.
Er braucht nun sehr lange um zu connecten, und wenn es klappt, dann nur
sehr kurz.
@Manuel:
der Bootloader scheint zu verbinden sendet dann aber permanent den Feler
$C2 zurück was heist CRC Fehler. Es sieht so aus als ob deine Hardware
Kommuniaktion unsauber ist. Auf alle Fälle empfängt der AVR permanent
irgendwelche Zeichen.
Antworten tut er auf alle Fälle korrekt, das kannst du an $96 09 06 04
37.. erkennen.
Gruß Hagen
Hallo,
ich habe noch ein Problem mit dem Bootloader. Ich denke ich stelle mich
nur dämlich an, aber ich finde es nicht raus.
Ich kann den Mega8 nur einmal über den Bootloader flashen. Danach
springt er den Loader nicht an.
Er müsste doch, wenn die SW sendet bei einem Reset den Bootloader
anspringen, oder?
Meines Fuses füge ich mal bei.
Der Mega8 läuft mit Quarz 12MHz. Es lauft dort ein Programm, welches
Daten ADC Daten auf der seriellen Schnittstelle ausgibt. Die kommen auch
am PC an.
Als Interface kommt ein FTD232 RL zum Einsatz, angeschlossen über
Rxd/Txd.
Der erste Flash funktioniert über diese Verbindung.
Im Protokoll des AVRootloader.exe sehe ich, dass Daten gesendet werde,
und das der AVR auch etwas sendet. Aber dies sind die Daten, die er auf
der seriellen ausgibt.
Der Reset liegt auf einem Taster mit PullUp Widerstand, und funktioniert
auch.
Wo ist mein Fehler?
Gruß
Christian
Hallo Sven,
danke für die Rückmeldung.
Leider geht es dann immer noch nicht.
Ein Reset des AVR löst weiterhin kein Connect mit dem AVROotloader aus.
Ich habe mal die Logdatei aus dem AVRootloader beigefügt.
Vielleicht kann damit jemand etwas anfangen.
Gruß
Christian
@Christian:
kannst du mir sagen was 'Channel 5 value 1023' bedeutet ?
Das ist nämlich das was die PC-Bootloader Software über deinen COM Port
empfängt.
Also am Bootloader liegt es nicht.
Gruß Hagen
Hallo Hagen,
das ist die Ausgabe des laufenden Programms. Es gibt nacheinander den
ADC Wert der 8 Ports aus.
Aus meiner Sicht bedeutet dies, der Bootloader wird nach dem Reset nicht
angesprungen. Nur beim ersten mal Flashen wird der Bootloader
angesprungen.
Wenn ich also jetzt mit meinem Programmiergerät über die IPS
Schnittstelle das HEX File des Bootloader flashe und im Anschluß über
den AVRootloader das Programm übertrage geht es. Beim zweiten Versuch
jedoch schon nicht mehr.
Gruß
Christian
ich kenne nur zwei Probleme die solche Symptome verurschen
1.) BOOTRST nicht gesetzt
2.) nicht an die beschrieben Vorgehensweise beim Kompilieren gehalten.
- BootCodeSize=0 setzen
- neu kompilieren
- aus AVRStudio Message Fenster cseg [used] auslesen
- in BootCodeSize eintragen
- neu kompilieren
Ansonsten kann man keine weiteren Ausagen dazu treffen, wie im Thread
hier schon mehrmals angesprochen, hast du nicht die nötigen Infos
geliefert.
Gruß Hagen
Hallo.
ich habe jetzt nochmal ein wenige getestet, und jetzt geht es. Ich weiss
aber nicht so richtig warum.
Vielen Dank für Eure Unterstützung.
Gruß
Christian
Also jetzt verstehe ich die Welt nicht mehr...
Nach viel rumprobieren schaffe ich es eine Verbindung herzustellen.
Ich benutze einen max232n mit Standardbeschaltung nach Datenblatt (5x
1muF). Beschaltet ist pin13(max) mit pin3(com) und pin14(max) mit
pin2(com). Andere Seite: pin11(max) mit pd1 und pin12(max) mit pd0.
Verbinde ich die Pind der Controllerseite habe ich ein schoenes
Loopback. Funktioniert tadelos.
Versuche ich nun mit AVRootloader zu verbinden klappt das nicht, bis ich
mindestens einen der Pumpelkos rausziehe, dann verbindet er sich sofort;
es koennen sogar Programme uebertragen werden. Stecke ich die Elkos
zurueck, bricht die Verbindung ab.
Was soll das? Ich bin kein voelliger Neuling auf dem Gebiet, habe sowas
aber noch nie gesehen?
Hallo Manuel,
ich hatte schon ein ähnliches Problem mit dem MSP430.
Ich erinnere mich noch dunkel das sich bei der INIT Sequenz über den
JTAG Programmer der RST Puls mit dem MAX232 gestritten haben. Der eine
will runter der andere ist per Default auf high, oder umgekehrt...
Das verstehe ich nicht, JTAG habe ich per fuse deaktiviert, ein Wechsel
auf andere Controllerpins aendert nichts.
Wenn ich den Controller Daten ausgeben lasse ist es uebrigens genauso,
mit Pumpelkos geht nichts; ziehe ich einen raus kommen sofort die Werte.
Stecke ich ihn wieder ein klappt die Uebertragung weiterhin, bis zum
reset des Controllers, dann geht das Spiel von vorne los.
Am Chip liegt es nicht, wurde bereits getauscht.
Das kann doch nicht so schwer sein, als ich den Chip die letzten Male
verbaut habe hats immer auf Anhieb geklappt. Fallen euch noch
Fallstricke ein, die ich uebersehen habe?
Einzige Erklärung meinerseits: dein Elko brückt den TX des MAX. Dh. du
meinst du hast diesen richtig angeschlossen, schließt ihn aber am TX
Eingang des MAX an und baust so einen schönen Tiefpass für die
Datenleitung. Zumindest würde das das beschriebene Verhalten erklären.
Gruß Hagen
Das wäre schön, dann würde ich die Sache verstehen...
Es ist egal welchen Pufferelko ich rausziehe (können auch beide sein).
An den Vout kann ich nachvollziehen, dass die Ladungspumpen arbeiten.
Wie gesagt, Loopback funktioniert mit Elkos, Übertragung zum AVR aber
nur ohne Elkos.
Geisterhaft...
Hallo Hagen.
Hagen Re schrieb:
> Ich benutz eigentlich zwei Arten um aus der Anwendung in den Bootloader> zu springen. Das ist sehr hilfreich beim Automatischen Programmieren des> AVRs. Bei den ATtinys überwache ich per PinChange ISR den RX Pin und> nutz eine ISR wie nachfolgende>>
1
>// Pinchange ISR für PB6, bei LowLevel springen wir den Bootloader an
2
>__attribute__((naked))ISR(PCINT_vect){
3
>
4
>if(PINB&(1<<PB6)){
5
>asmvolatile("reti");
6
>}else{
7
>asmvolatile("rjmp __vectors");
8
>}
9
>}
10
>
11
>intmain(void){
12
>
13
>MCUSR=0;
14
>WDTCR=(1<<WDE)|(1<<WDCE);
15
>WDTCR=0;
16
>// RX Pin auf Eingang mit Pullup
17
>DDRB=0;
18
>PORTB=(1<<PB6)
19
>// PinChange on PB6, Bootloader Pin
20
>GIMSK=(1<<PCIE1);
21
>PCMSK1=(1<<PCINT14);
22
>sei();
23
>
24
>..blabla
25
>while(1){
26
>}
27
>}
28
>
>> Das hat den Vorteil das man die laufende Anwendung durch die PC-Software> automatisch in den Bootlaoder kommt. Da es ohne Watchdog per direktem> RJMP geht kann man über den SRAM Befehl der PC-Software den aktuellen> Inhalt des SRAMs und IO/PORT Bereiches auslesen und analysieren.>
Leider kann ich kein Assembler, würde aber gerne grob verstehen, was du
damit meinst. Wenn ich einen Attiny ohne Hardware UART habe, stehen mir
doch auch keine UART Interrupts zur verfügung. Was bedeutet in diesem
Fall "PinChange"?
Bascom könnte ich verstehen. Da funktioniert der Befehl ISCHARWAITING()
z.B. nicht beim Attiny mit Software UART. Ich kann nur mit Inkey() das
momentan empfangene Zeichen lesen oder mit waitkey() solange das
Programm anhalten, bis ein Zeichen empfangen wird und dieses einlesen.
(Soweit ich das verstaden habe)
Bei "meiner" Watchdog Lösung gibts das Problem, dass die Verbindung
häufig erst nach einigen Sekunden hergestellt wird, oder auch mal gar
nicht. Vermutlich weil die restlichen 4 Pins permanent damit beschäftigt
sind, einen Schrittmotortreiber zu füttern und ADC Signale zu empfangen.
Dann reagiert die Serielle Schnittstelle gar nicht.
Vielleicht käme ich mit der Alternative zum Watchdog weiter.
Viele Grüße
Robertz
PinChange = Pin Change Interrupt so wie im Datenblatt beschrieben. Man
wartet also auf verändeerungen an einem Pin, hier also der RX Pin des
Bootloaders und ruft den Bootloader aus der Anwendung auf. Wenn du in
deiner Anwendung mit IRQs arbeitest hat dies den Vorteil das deine
beschtriebenen Wartezeiten wegfallen. Ich vermute mal du benutzt in
deienr App eherr das Polling.
Der Watchdog wird dann benutzt um einen echten RESET des AVRs zu
bewerkstelligen und damit den Bootloader definiert zu starten. Das ist
besser als ein direkter Sprung zum Bootloader aus der Applikation.
Also:
1.) schreibe eine ISR für den Pin Change IRQ
2.) in dieser ISR prüfst du den RX Pin auf Veränderung und aktivierst
den WDT mit anschließdender Endlosschleife. Somit schlägt der WDT zu und
reset den AVR.
3.) in deiner Main aktiviere den Pin Change IRQ und setze die Pin-Maske
für den PinChange IRQ korrekt. Also auf welchen Pin die PinChange ISR
reagieren soll.
4.) in deiner Main aktiviere die Interrupts mit SEI().
Das von dir zitierte Beispiel arbeitet zwar mit dem PinChange aber nicht
mit dem Watchdog sondern direktem Sprung zum Bootloader.
Gruß Hagen
Falls du eher der HW-Typ bist und die SW nicht gebacken bekommst kannst
du auch per HW einen RESET auslösen lassen. Die PC-Software unterstützt
die Konfiguiration des DTR/DSR Pin der RS232. Diesen Pin kannst du an
den RESET des AVRs legen. Jedesmal wenn nun die PC-Software einen
Connect versucht pulst sie die DTR/DSR Leitung der RS232 und somit den
RESET Pin des AVRs.
Wie es konkret geht steht hier im Thread, Readme's und AVRootloader.ini
beschrieben.
Gruß Hagen
Hallo,
ich arbeite mit dem AT90USB1287 auf einem AT90USBKey Board und wollte
gerne Deinen Bootloader ausprobieren. Leider hat das Board aber keine
RS232-Schnittstelle sondern nur USB (und JTAG).
Das Kompilieren des Bootloaders und das Laden in den Flash hat auch
geklappt, allerdings erkennt der PC das Device nicht (im Devicemanager).
Vermutlich liegt das daran, dass eine USB-Kommunikation zwischen
Bootloader und PC nicht vorgesehen ist sondern nur RS232 oder?
Kann ich den Bootloader trotzdem irgendwie verwenden bzw. gibt es eine
Version mit USB? Oder sollte es eigentlich funktionieren und ich hab nur
was falsch gemacht?
Danke für die Hilfe!
Gruß,
Nora
Alle auf RS232 und RS485 basierten Schnittstellen gehen, nicht USB. Das
müsstest du schon selbst programmieren.
Am besten dürfte es sein wenn du einen beliebigen Pin des AVRs als
1-Wire-RS232 Bootloader Pin benutzt. Du brauchst dann nur bischen zu
löten, siehe 1-Wire.png im ZIP und einen USB-Seriell Wandler.
Gruß Hagen
Hi zusammen,
ich setze den Rootloader seit einiger Zeit ein.
Läuft soweit prima!
Jedoch habe ich jetzt was ganz merkwürdiges:
2 identische Schaltungen mit Mega8L und Quarz 8Mhz,
3V3 UB und 1 Wire Mode.
Der einzige Unterschied zwischen den Beiden sind die
Prozessoren die aus unterschiedlichen Chargen stammen.
Eine Schaltung kann ich problemlos flashen, bei der
anderen kommt kein Connect zustande.
Flashe ich herkömmlich, also mit normalen Programmer,
läuft die Schaltung einwandfrei.
Fusebits sind natürlich richtig gesetzt, das hex des
Rootloaders ist natürlich immer das gleiche.
Kann mir dabei jemand helfen?
Hi matthes,
ich hatte mal das Problem, dass der Quarz nicht recht anschwingen wollte
und somit der Bootloader nur ab und zu funktionierte. Das Setzen der
CKOPT-Fuse hat geholfen. Evtl. liegt's auch am Quarz? ;)
Du könntest die Prozessoren mal in den Schaltungen tauschen, dann weißt
du zumindest, ob's der µC ist oder die Schaltung. ;)
Bei SMD natürlich etwas aufwändiger ...
Ich habe mal eine Frage: Das Windows Programm zeigt ja eine maximale
Buffergröße des Bootloaders an. Wie finde ich heraus wie viel SRAM bei
meiner Booloader-Konstellation für den Buffer übrig bleibt. Deine
Software meint 472 Byte; ich haben aber keine Idee, wie Du das abfragst
oder aus den Device-Parametern
berechnest.
Ach ja: BootloaderSize = Flash_PageSize * BootPages;
Stimmt das?
Vielen Dank für eine Erleuchtung!
Achim
Also, BaudTolerance auf 5 bringt auch nix.
Prozessor kann ich nicht über kreuz tauschen, da die
andere Schaltung wasserdicht vergossen ist.
Habe jetzt praktisch jeden Parameter ausprobiert,
egal was ich mache, es klappt nicht. Auch die Quarzfrequenz
stimmt. Ich gehe mal davon aus, das "faststartup" bei den
Fuses richtig ist. Habe da aber auch mehrere Einstellungen
versucht......
Auf allen anderen Schaltungen mit einem Mega8 die ich
auftreiben konnte funktioniert der Bootloader einwandfrei.
Ich mache mir nur Sorgen, wenn ich bei der nächsten Bestellung
nur solche "Ausreißer" bekomme ...........
>Ach ja: BootloaderSize = Flash_PageSize * BootPages;>Stimmt das?
Ja.
(SRAM Size / FLASH_PageSize -1) * FLASH_PageSize ergibt maximale
Buffergröße. Somit ist sichergestellt das 1. noch genügend SRAM für den
Stack vorhanden ist und die 2. 8 bytes Prüfsummenblöcke auch noch
reinpassen.
Maximal benutzt die Software also (SRAM Size / FLASH_PageSize -1) *
FLASH_PageSize +8 bytes.
Gruß hagen
Hallo Hagen,
erstmal vielen Dank für deinen genialen Bootloader.
Ich verwende folge Zusammenstellung:
Atmega8L (TQFP32) 8Mhz (extern)
Kommunikation mit dem PC über ein Bluetooth-Modul BTM-222.
Wird wie ein gewöhnlicher COM-Port behandelt.
Dein Bootloader in der Version 6.0
Mein Ziel: Atmega über Bluetooth flashen OHNE manuellen Reset per Knopf.
Mein Stand: Flashen mit externen Reset funktioniert jetzt einwandfrei
nach langen Versuchen mit den Timeouts.
Dann habe ich die Watchdog Methode gewählt.
Diese Funktioniert auch soweit gut hatte bei mir bis jetzt aber den
Nachteil, dass mein Hauptprogramm ungewollt alle 2 Sekunden resettet.
Daraufhin habe ich den Watchdog im Hauptprogramm deaktiviert, dann
funktionierte aber wie erwartet nicht mehr der Bootloader-Reset über die
PC Software. Und ein Watchdog-Reset alle 2 Sekunden möchte ich nicht im
Hauptprogramm verwenden.
Jetzt würde ich gerne die PinChange Funktion nutzen um meinen Atmega8 zu
resetten.
Weil der BTM-222 hat zwar ein RTS/CTS Pin kann diesen aber nicht nutzen.
Sprich ein Reset über ein RTSPulse kann ich leider auch nicht nutzen.
Muss ich dann nur ein Codeschnipsel in mein Hauptprogramm einfügen um
ein PinChange zu erreichen?
Das BTM-222 verwendet mit dem Atmega8 ein 2Wire Modus ohne Pegelwandler
aber mit deiner UARTInvert option.
Verstehe ich es richtig, dass deine PC-Software über AppCMD z.b. den
Wert 0x55 ans Hauptprogramm schickt und der Atmega dann über PinChange
resettet.
Sorry,... ich bin noch recht neu in der MCU-Programmierung und weiß
jetzt nicht welche Lösung ich verwenden soll...
P.S. Dein Test-Sourcecode im Ordner Test lässt sich bei mir im
AVR-Studio 4.18 mit dem AVR-GCC Compiler nicht compilieren. Da kommt
immer ein Fehler von der ld.exe
Über eine Hilfe würde ich mich sehr freuen. :-)
Gruß Dennis
Hi Dennis,
wie du weiter oben gelesen hast, habe ich einen Atmel der
nicht so richtig will. Was verwendest du für Timeouts?
Ich habe auch schon mit denen gespielt, evtl. sind diese
aber noch zu eng eingestellt?
Ich habe die Timeouts in der INI nur bei BASE geändert. Auf 100ms.
Das funktioniert sogar über Bluetooth 100% zuverlässig allerdings nur
per RESET-Taster.
Da ich aber Bluetooth verwende, nervt mich der Reset-Taster.
Ich möchte demnach einen Reset per Software durchführen, bekomme das
aber nicht gebacken!
Reset via RTS-Signal ist leider auch ausgeschlossen, weil das BTM-222
unterstützt diese Funktion nicht.
Jetzt bleibt nur noch Watchdog oder ein "Jump to Bootloader" übrig.
Nur mir fehlt ein Lösungsansatz. Das Beispiel im Ordner Test verstehe
ich nicht so ganz.
Zumal wie ich jetzt herausgefunden habe besitzt der Atmega8 keine
PinChange Funktion über "PCINT", der 8er hat nur den externen INT0 und
INT1 Pin.
Gruß
Dennis
Du hast mehrer Möglichkeiten:
1. Polling des RX Pins des Bootloaders in deiner Anwendung. Falls der RX
pin toggelt dann über Watchdog Reset den Bootloader starten
2. PinChange oder Ext. Int. am RX Pin benutzen und auf Toggeln der RX
datenleitung warten.
3. schreibe UART Funktionen für deine Anwendung. In der Empfangsroutine
wartest du auf eine von dir festlegbaren Command String, zb. sowas wie
"bootstart". Wenn du den empfängst kannst du einen Response String
zurück senden, zb. "startboot" und wiederum per Watchdog Timeout einen
Reset zum Bootloader durchführen. In der AVRootloader.ini setzt du das
Topic AppCmd=bootstart und AppCmdresponse=startboot. Setze [Timeouts]
AppCmd=20.
Der PC-Bootloader sendet nun vor jedem Connect Versuch den String
"bootstart" an deine Anwendung im AVR. Dort reagierst du indem du
"startboot" sendest und den WDT startest. Die PC Software wartet bis sie
"startboot" also das AppCmdresponse empfangen hat, fügt ein 20
Millisekunden Delay ein und macht mit dem normalen Connect zum
AVRootoader im AVR weiter.
Somit hast du also den Bootloader im AVR softwaremäßig gestartet.
Wenn AppCmdResponse nicht benutzt wird, also leer ist, dann wartet die
PC Software nicht auf eine Bestätigung Seitens deiner UART Routinen
sondern macht gleich mit dem AppCmd delay und dem Connect weiter.
Letztere Methode ist mit ihrem Handshaking relativ stabil und sicher hat
aber den Nachteil das die Baudrate in deinen UART Routinen meistens
hardcoded ist, dh. die AutoBaud Funktion die im Bootloader drinnen ist
steht dir nicht zu Verfügung.
Gruß Hagen
Hallo,
ich bin gerade dabei den AVRootloader auf meinem ATmega8 in Gang zu
bringen, leider funktioniert es bisher nicht:
Ich habe die AVRootloader.hex laut Anleitung erstellt (AVR-Studio, mit
"m8def.inc" sowie der richtigen Portbeschreibung für den ATmega8, also
PD0 und PD1).
Die hex-Datei habe ich mit Ponyprog auf den ATmega8 geladen.
Bei der Fusebits bin ich mir 100%ig sicher:
BOOTSZ1 = 1 (kein Häkchen)
BOOTSZ0 = 0 (Häkchen)
BOOTRST = 0 (Häkchen)
Der Code hat nur 432Bytes (<256Words), also sollten die Fusebits
eigentlich passen, oder?
Wenn ich nun die Verbindung mit AVRootlaoder aufbauen möchte findet er
leider keine Device
im Protocol steht:
29.12.09-15:28:04-687 > Connecting on port COM1...
29.12.09-15:28:05-796 > Connecting on port COM41...
29.12.09-15:28:06-875 > Connecting on port COM42...
29.12.09-15:28:15-546 > Error: no Device found
Die Kommunikation über die RS232 funktioniert aber sicher, hab eben grad
getestet.
Mache ich grundsätzlich irgendwas falsch, oder ist zumindest mein
vorgehen korrekt? oder hat zufällig einer einen konfigurierten
Bootloader fürn ATmega8 mit passenden Fusebits herumliegen?
Vielen Dank für Eure Hilfe!
Schöne Grüße
CJ
Hagen Re schrieb:
> (SRAM Size / FLASH_PageSize -1) * FLASH_PageSize ergibt maximale>> Buffergröße. Somit ist sichergestellt das 1. noch genügend SRAM für den>> Stack vorhanden ist und die 2. 8 bytes Prüfsummenblöcke auch noch>> reinpassen.>> Maximal benutzt die Software also (SRAM Size / FLASH_PageSize -1) *>> FLASH_PageSize +8 bytes.
Vielen Dank Hagen, aber bitte hilf mir doch nochmal:
Bezogen auf meinen ATTiny84 wäre das dann:
(512/64 -1)* 64 =448 Bytes Buffergröße
Mit Deinem Programm bekomme ich aber folgendes:
Connection : 1-Wire
Device name : ATtiny84
Device signature : 1E930C
SRAM size : 512 Byte
EEPROM size : 512 Byte
FLASH size : 8192 Byte
FLASH size for application : 7232 Byte
FLASH pagesize : 64 Byte
Bootloader size : 960 Byte
Buffersize for data : 472 Byte
SRAM start address : 96
Bootloader version : 6
Use bootsection : No
Versioning supported : Yes
Cryptography supported : Yes
FLASH data must be encrypted : Yes
EEPROM data must be encrypted : No
Bootloader information :
Application software version : 3.2.2.0
Application version address : 0x001C3A
Die PC-Software geht von SRAM_Size - PageSize + 24 aus. Ergibt 512 -64
+24 = 472 Bytes. Ganz genau genommen geht sie immer davon aus das
SRAM_Size mod PageSize = 0 ist also immer ohne Rest teilbar. Am
korrektesten wäre also die Formel (SRAM_Size div PageSize -1) * PageSize
+ 24.
Das ist der vom Protokoll her gesehen maximale Buffer der benutzt wird.
Wird Verschlüsselung benutzt so muß man die 512 Bytes erstmal in x
PageSize Buffer unterteilen. Damit für den Stack noch was übrig bleibt
ziehen wir erstmal PageSize ab und erhalten so den minimal nutzbaren
Datenbuffer = 448 Bytes. Das ist die maximal nutzbare Größe für die
Daten im FLASH/EEPROM. Bei der Entschlüsselung wird im SRAM noch
zusätzlich 3 XTEA-Buffer a 8 Bytes benötigt. Der erste XTEA Datenblock
ist intern das Feedback Register, der 2. Datenblock a 8 Bytes ist das
Ausgaberegister. Der 3. 8 Bytes Buffer liegt dann am Ende des SRAMs und
enthält den zu entschlüsselnden Prüfsummenblock. Vor diesem liegen nun x
Pages a PageSize Bytes an FLASH/EEPROM Daten. Somit ergibt sich das wir
den SRAM erstmal in 64 bytes (Pagesize) Blöcke aufteilen. Somit kommt
man auf Max. Buffersize = SRAM_Size - Page_Size + 24. Es verbleiben dann
40 Bytes für den Stack.
Dieser Buffer wird aber nur so groß benötigt wenn mit der
Verschlüsselung gearbeitet wird, ohne Verschlüsselung fallen die 24
Bytes weg.
Bei der Verschlüsselung sieht es also so aus: Feedback | Output |
Datenblock 1 | Datenblock 2 | ... | Datenblock x | Prüfsummenblock.
Alle diese Blöcke sind 8 Bytes groß. Die Anzahl x dieser Datenblöcke ist
immer x = (SRAM_Size - Page_Size) / 8.
Wird nun entschlüsselt so "wandern" die Bedeutung dieser 8 bytes Blöcke.
Am Anfang wird das Feedback Register mit den Datenblock 1 XOR verknüpft.
Dann wird dieser Block mit XTEA halb entschlüsselt und dieses
Zwischenresultat mit dem Feedback Register erneut xor-verküpft. Nun die
zweite Hälte der XTEA Entschlüsselung durchgeführt und in den als Output
markierten Datenblock gespeichert. Aus dem ehemaligen "Output" Block
wird der nächste "Feedback" Datenblock und aus Datenblock 1 wird der
neue "Output" Block. Nun beginnt wieder alles von vorne usw. Somit
stehen die verschlüsselten Datenblöcke am Anfang der Entschlüsselung um
8 bytes nach hinten versetzt im SRAM und nach der Entschlüsselung sind
diese Daten um 8 bytes nach vorne kopiert wurden. Damit wird die
Entschlüsselungsfunktion so wie erforderlich in ihrer Performance
gesteigert und das gesammte System arbeitet wie ein "sliding Window"
während der Entschlüsselung über den kompletten Buffer. Das erklärt die
zusätzlichen 24 Bytes die man benötigt.
Gruß Hagen
Hallo Hage,
super vielen Dank für Deine ausführliche Antwort!!!
Ich verstehe ungefähr 30% davon, den Rest werde ich mir noch erarbeiten.
Ansonsten läuft Dein Bootloader bei mir einfach nur spitzenmäßigg,
reibungslos, wie es sein soll. Vielen vielen Dank für Deine AArbeit!!!
Gruß Achim
Hallo zusammen,
kann mir auf die Schnelle jemand verraten wie ich aus der Applikation
direkt in den Bootloader springen kann?
Bei BootMode = 0 sollte das doch mit einem jmp gehen.
Es geht um einen Atmega644; das Datenblatt sagt, bei FirstBootStart
beginnt die BootLoader Flash Section bei 0xfe00.
Warum bringt mich
asm volatile("rjmp 0xfe00") dann ins Hauptprogramm?
Vielen Dank.
Manuel
Schaue dir mal den \Test\ Ordner im ZIP an. Dort zeige ich wie man mit
WinAVR GCC in C den Bootloader startet. Entweder per direktem Jump oder
viel besser mit dem WatchDog. Machst du einen Jump dann musst du
sicherstellen das du alle HW und Ports usw. manuell so zurücksetzt das
der AVR so wie nach einem RESET eingestellt ist. Nutzt du dagegen den
WD-Timeout wird der AVR einen RESET machen und alles ist so wie es der
Bootloader erwartet.
Gruß Hagen
Hallo Hagen,
vielen Dank für dein AVRootloader, ich finde ihm TOP!
Ich habe es geschafft eine Verbindung zwischen dem PC und einem
AT90USB1287 (AT90usbkey Plattform) zu kriegen. Als Verbidung habe ich
den 1-Wire verwendet ( aber nicht mit 2,7 kOhm, sondern mit 2 kOhm
Widerstand, ich hoffe,dass das kein Problem ist ;) ) Das einziges
Problem ist, dass die Baudrate kann nicht mehr als 28800 eingestellt
werden, keine Ahnung warum.
Ich habe kleine Anwednung, ein paar LEDs leuchten lassen, geschrieben
und mittels dein Windows-Programm verschlüsselt und drauf geladen. Es
ging ohne Probleme!
Das Problem ist, wenn ich eine großere hex-Datei auf dem µC laden will.
Es funktioniert irgenwie nicht. Ich habe keine Ahnung warum nicht, habe
alles durchgesucht, nochmal alles gelesen, aber nichts gefunden. Ich
habe auch mit den Werten für Timeouts gespielt, aber wieder ohne Erfolg!
Vielleicht hättest du eine Idee woran mein Problem liegt? Ich hänge dir
das Protocol an. In dem kann man sehen, dass ich zuerst eine kleine
Anwendung erolfreich lade, dann versuche ich eine großere Anwendung(
60kBytes) zu laden, aber es gibt einen Fehler.
Es ist egal, ob ich die Verschlüsselung benutze oder nicht, in beiden
Fällen es funktioniert nicht.
Vielen Dank im Voraus! Wenn du andere Infos brauchst, sag einfach
bescheid.
Gruß Kostadin
Hallo,
ich habe jetzt auch versucht den Bootloader auf meinem Atmega8 zu
verwenden. Leider bekomme ich keine Verbindung!
Meine Einstellungen:
1
.include "m8def.inc"
2
3
.equ UseAutobaud = 0
4
.equ UseResetDelay = 1
5
6
.equ RX_PORT = PORTD
7
.equ RX = PD0
8
.equ TX_PORT = PORTD
9
.equ TX = PD1
10
11
.set XTAL = 12000000
12
.set BootDelay = XTAL/4
13
.set BootBaudrate = 9600
14
.set BootVersion = 6
15
.set BootCodeSize = 466
FuseBits:
BOOTSZ1 = 1
BOOTSZ0 = 0
BOOTTRST = 0
Wenn ich meinen Controller resette (Taste) dann empfange ich eine 0
(Byte-WERT) mit dem Terminal.
Ist das richtig? Sendet der Bootloader eine 0 beim starten?
Hat sich erledigt.
Ich hatte das Invertieren nicht gesetzt.
Ich bin begeistert von dem Bootloader. Mit AppCmd und Watchdog
automatisch resetten. Funktioniert alles bestens.
TOP Bootloader
@Kostadin:
du benutzt 1-WIRE-RS232 ? Laut Protokoll, ja, er bringt aber auch einen
ICOM-Echo-Fehler was darauf schließen lässt das du eben nicht 1-Wire als
Hardware benutzt. Bei 1-Wire muss das was die PC-Software an Daten
sendet auch von der PC-Software wieder empfangen werden, das sogenannte
Echo der Daten. Das wird durch mein RS232 1-Wire Treiber berücksichtigt.
Das Echo wird wieder empfangen und mit den vorher gesendeten Daten
verglichen. Sollten Unterschiede im Echo gefunden werden oder das Echo
ganz ausbleiben so wird der ICOM-Echo-Error gemeldet.
Ich vermute also: entweder nutzt du keine 1-Wire Hardware und die
PC-Software detektiert nicht den richtigen Modus, also 1-Wire statt
2-Wire. Oder du benutzt 1-Wire Hardware und diese ist nicht stabil.
Gruß Hagen
Hallo euch allen,
ich bin schon seit einiger Zeit auf der Suche nach einem CAN-Bootlader
für den AT90CAN. Leider konnte ich dazu aber kein fertiges Projekt
finden.
Genauere Informationen gibt es unter fogendem Link:
Titel - Beitrag "CAN BUS Bootloader AT90CAN"
Ich hoffe es finden sich einige um dieses Projekt zu realisieren oder
die dabei helfen können.
Grüße martin
Hallo Hagen,
ich hab mal versucht, Dich via PM zu kontaktieren, was bisher nicht
gelang. Wahrscheinlich ist Deine t-offline Addy nicht mehr aktuell.
Auf alle Faelle hab ich nen avrdude Patch, der Flash schreiben und
verifizieren (implizit und bissl hingedreht auch explizit) kann.
Jetzt steht nur noch EEPROM schreiben (lesen muesste gehen) und
Encryption an. Und genau bei der Encryption brauch ich Deine Hilfe. Wie
funktioniert das Verfahren? Ich werde das dann fuer avrdude
implementieren, damit der bootloader vollstaendig unterstuetzt wird.
Ziel ist natuerlich die Aufnahme der Unterstuetzung in Mainline, womit
dann alle wichtigen Systeme abgedeckt sein duerften.
Ich bin unter swarner ät mibtec punkt de zu erreichen.
Gruß,
Sascha
Hi Swarner,
deine Idee finde ich klasse! Ich habe auch mal ein Programm für den
Bootloader geschrieben. Wahlweise Kommandozeile oder GUI. Das ganze ist
in Lazarus geschrieben, sodass es auf vielen Plattformen funktioniert.
Verschlüsseln kann es nicht. Dafür kann es aber schon verschlüsselte
Dateien programmieren.
im Beitrag
Beitrag "Re: AVR-Bootloader mit Verschlüsselung"
ist der Quellcode. Ich hoffe er hilft dir weiter. Auf das alles bald im
AVRDude erscheint, was richtig klasse wäre!
Viele Grüße,
piowux
@Sascha: sorry aber zZ. bin ich gebunden mit anderen Projekten. Wenn
deine Mail sich nur auf ein kleines Problem bezöge hätte ich sichderlich
just in time auch geantwortet. Da du aber eine ausführliche
Dokumentation von mir benötigst brauche ich mehr Zeit dazu, und die habe
ich eben nicht. Ich schaue zu das ich die nächste freie zeit benutzte um
dir alle infos sauber zusammen zu stellen.
Gruß Hagen
@Hagen: Danke fuer die Antwort. Solange Deine Mail Adresse richtig war,
bin ich beruhigt :) Die Encryption eilt nicht, wahrscheinlich ist es
sogar besser, wenn ich da inkrementell vorgehe. Also mach Dir da keinen
Stress deswegen - ich bin noch laenger da.
@Arne: Danke fuer Deinen Code. Wenn ich wo Zweifel hab, kann ich jetzt
nachsehen, wie Du es Dir gedacht hast :) Ich hab z.B. ganz vergessen den
"RUN" Command zu nutzen ;)
Wegen Deines ATMEGA8-only-Poblems: Du brauchst glaub ich CPU abhaengig
nur die RAM Puffergroesse. Wenn Du einfach die Pagesize nimmst, die du
fuer die Bootloadergroesse eh brauchst (erase pages usw.), liegst Du auf
der sicheren Seite (ok, muesstest Du je CPU die Pagesizes verwalten,
alternativ nimmst Du die kleinste Pagesize, die vom Bootloader
unterstuetzt wird, 32 Bytes. Das Flashen wird dadurch wesentlich langer
dauern, aber immerhin kannst so alles flashen.) Ich musste genau
deswegen dem dude noch ein sramsize in die Chip Config pflanzen -
leider.
Gruesse
Sascha
Hallo,
Der Bootloader läuft bei mir super mit Kabel.
Jetzt möchte ich über Bluetooth (BTM-222) flashen.
Leider bekomme keine Verbindung über Bluetooth.
Wie muss ich die Timeouts einstellen?
Base habe ich schon versucht zu erhöhen. 50, 100, 200
Es kann keine Verbindung aufgebaut werden!
Meine Einstellungen:
Connection : 2-Wire
Device name : ATmega16, ATmega16A
Device signature : 1E9403
SRAM size : 1024 Byte
EEPROM size : 512 Byte
FLASH size : 16384 Byte
FLASH size for application : 15360 Byte
FLASH pagesize : 128 Byte
Bootloader size : 1024 Byte
Buffersize for data : 920 Byte
SRAM start address : 96
Bootloader version : 6
Use bootsection : Yes
Versioning supported : Yes
Cryptography supported : No
Application software version : not defined
Application version address : 0x003BFC
[Timeouts]
Connect=0
Base=100
Erase=10
Flash=15
Eeprom=10
Buffer=1
AppCmd=0
KeepAlive=250
MaxPacketSize=0
RTSPulse=0
RTSInterval=0
Options=1
Hallo Hagen !
Ich hab mal zwei kurze Fragen zu UseSpecialWrite.
Da mein ganzes Projekt in ASM ist, hab ich den Aufruf folgendermassen
programmiert:
1
ldi r18, low(Puffer) ;Buffer
2
ldi r19, high(Puffer)
3
4
ldi r20, low(32) ;size
5
ldi r21, high(32)
6
7
ldi r22, 0x00 ;Adresse die Überschrieben wird (0x0f00)
8
ldi r23, 0x0f
9
clr r24
10
clr r25
11
12
RJmp Flashend -5
Ist das so richtig ? (Denn bei mir funktionierts leider nicht)
Bin leider kein C-Profi, deshalb ist das Test-Project für mich nicht
immer ganz so leicht zu verstehen !
UseSpecialWrite = 1 !
Muß ich sonst noch was einstellen oder ändern ?
Gruß
Stefan
>>Ist das so richtig ?
Nein, benutze RCALL statt RJMP da ja die Bootloader Funktionen mit RET
zum Aufrufer zurückkehren. Es sei denn dein obiger Sourceausschnitt wird
selber per RCALL aufgerufen und du möchtest das die Bootloader
Funktionen direkt zu derem Aufrufer zurückkehren sollen.
Desweiteren sollte der Offset -2 statt -5 sein. Im C Source ist dort -5
weil die FLASH Adressen als Byteaddressen interpretiert werden in ASM
aber als Wordadressen.
Deine Parameter->Register sind korrekt.
Aktiviere mal UseSpecialRead=1 und UseSpecialMsg=1. Dann schreibe einen
Aufruf für UseSpecialMsg
RCALL FlashEnd-4
In R25 sollte nach Rückkehr der Funktion die Länge des Boot-Msg-Strings
drinnen stehen und in r24:r23:r22 der Zeiger auf die FLASH Adresse an
der die BootInfo steht. Nun kannst du damit die BootInfo aus dem FLASH
lesen ,wenn die Security-Fuses so gesetzt sind das die App auf den
Boot-FLASH zugreifen kann. Somit hats du erstmal eine reine ReadOnly
Funktion und zerschießt dir nicht gleich den FLASH wie bei falschem
Aufruf von WriteFlash().
Im nächsten Schritt benutze ReadFlash() um Daten aus dem FLASH in einen
SRAM Buffer zu lesen. Wenn das geht mit WriteFlash() weitermachen und
mit ReadFlash() verifizieren.
Gruß Hagen
@Etumic:
Die BTM-222 sind bischen schwer zu konfigurieren und kannst du
sicherstellen das diese korrekt laufen ? Wenn ja wird es ein Timing
Problem sein und da kann ich dir nur schlecht weiter helfen.
Gruß Hagen
@Stefan:
nochwas:
- alle diese Funktionen benutzen Byteadressen als FLASH-Zeiger
- r25 des 4-Bytes Zeiger auf die zu schreibende FLASH Adresse ist
normalerweise 0x00 (es gibt ja nicht soviel FLASH in einem AVR). Benutzt
du in r25 den Wert 0xAC als Magic Code kannst du in den Boot-FLASH
schreiben, falls du die Securityfuses entsprechend gesetzt hast.
- in ASM ist FlashEnd = FLASH_SIZE_IN_BYTES / 2 -1, sollte also bei dir
die Word Addresse sein.
Gruß Hagen
Hallo Hagen !
Vielen Dank für die Hilfe !
Es lag am Rjmp Flashend -5 !
Das sind halt die feinen Unterschiede zwischen C und ASM !
Fals nochmal jemand danach sucht:
Hier der Funktionierende Code für den Aufruf von UseSpecialWrite aus
Assembler:
1
ldi r18, low(Puffer) ;Puffer im SRam
2
ldi r19, high(Puffer)
3
4
ldi r20, low(32) ;Anzahl der zu schreibenden Bytes
5
ldi r21, high(32)
6
7
ldi r22, Byte1(Adresse*2) ;Adresse im Flash die Überschrieben wird
8
ldi r23, Byte2(Adresse*2)
9
ldi r24, Byte3(Adresse*2) ;wird nur bei großen AVR's benötigt, sonst
10
ldi r25, Byte4(Adresse*2) ;einfach auf 0x00 setzen
11
12
RCall Flashend -2 ;Rücksprung aus Bootloader mittels 'Ret'
Hagen schrieb:
> @Etumic:>> Die BTM-222 sind bischen schwer zu konfigurieren und kannst du> sicherstellen das diese korrekt laufen ? Wenn ja wird es ein Timing> Problem sein und da kann ich dir nur schlecht weiter helfen.>> Gruß Hagen
BTM-222 läuft auf jeden Fall korrekt.
Inzwischen habe ich hiermit
http://forum.pololu.com/viewtopic.php?f=23&t=651
meinen eigenen Bootloader geschrieben.
Mein Bootloader ist nicht so funktionsreich (nur feste Baudrate, keine
Verschlüsselung usw.), ist total simpel. Ich brauche aber auch nicht
mehr.
Damit kann ich aber über Bluetooth oder sonstige langsame
Funkverbindungen problemlos übertragen. Auf dem Microcontroller gibt es
nämlich gar keine Timeouts mehr, wenn man im Bootmodus ist. Theoretisch
kann man auch mit dem Terminal Zeichen für Zeichen an den Controller
senden und flashen.
Gruß,
Etumic
@Stefan:
ich weiß nicht ob es von dir so beabsichtig ist aber die FLASH Adresse
für WriteFlash() kann byteadressiert sein und muß nicht zwangsläufig mit
zwei multipliziert werden um wordbasiert zu sein. Das Besondere an
WriteFlash ist es das man an beliebige FLASH Adresssen beliebig große
Datenbereiche schreiben kann. Man brauch nicht auf Wordalignment oder
die Pagesize des FLASHs achten. Man kann also im Minimalfall nur 1 Byte
an eine ungerade FLASH Adresse schreiben. Diese Funktion lädt dann die
betroffene FLASH Page, modifiert an der richtigen Stelle das zu
schreibende Byte aus dem SRAM Buffer und schreibt dann diese FLASH Page
zurück.
Gruß Hagen
Hallo,
ich setzte den Bootloader schon längere Zeit ein und möchte ihn nicht
mehr missen. Ich habe eine ältere Version im Einsatz die bisher super
funktioniert hat. Bisher...
Diesen Bootloader habe ich compiliert und sie wie er ist mehrfach auf
identische Hardware gebrannt. Das lief immer problemlos.
Gestern wollte ich noch zwei der Gerätchen bauen, nach dem Test habe ich
den Bootloader drauf geschrieben, und bekomme keinen Kontakt. Hardware
ist ein Mega644p, wenn ich meine Software direkt drauf flashe läuft
alles prima, der Bootloader ist aber nicht ansprechbar.
Alle Fuses sind korrekt gesetzt, die Speichergröße im ASM-File auch,
habe jetzt alles zigmal kontrolliert. Ebenso die Bootstrings usw. Alles
wie früher. Ich habe sogar ein uraltes Backup zurück geschrieben um
sicher zu gehen, dass ich wirklich denselben Bootloader habe. Nix
klappt..
Was könnte das verursachen? PC-Macke? Mit der Windows-Software des
Bootloaders kann ich auch auf die alten Geräte nicht mehr zugreifen, da
kommt immer Checksum error. Mit meiner eigenen über die DLL klappt es
dagegen mit den alten Geräten prima.
Ich habe mit der DLL damals eine Funktion in meine PC-Softwar eingebaut
mit dem der Anwender neue Firmware flashen kann. Wenn ich jetzt die
neueste Version des Bootloaders nehme, kann ich dann mit der alten DLL
noch darauf zugreifen? Oder hat sich da immer wieder viel verändert?
Meine Version ist aus dem Mai 2008. Ansonsten müssten alle ihre Software
updaten, das wäre schlecht.
Louis
Probiere in der AVRootloader.ini in [Timeouts] Options=2 oder Options=0.
Der "Login" Prozess beim Senden/Empfangen des BootSigns hat sich
zwischen den Versionen geändert. Mit Options=2 wird der alte Loginstring
gesendet und mit Options=0 der neue. Beim Neuen wird über das gesendete
BootSign noch eine CRC erzeugt, mit gesendet und im Bootloader
dementsprechend geprüft.
Zudem solltest du in Zukunft zu jedem deiner Projekte bei denen du den
Bootloader einsetzen möchest ein kompletes Backup der entsprechend
konfigurierten Bootloader Software dazu legen. Das beinhaltet auch die
PC Software. So mache ich das immer und Speicherplatz ist heutzutage
kein Problem mehr.
Gruß Hagen
Hallo Hagen, danke, das werde ich mal testen.
Ich habe ja ein Backup des Bootloaders, auch die Originale Version aus
dem Backup, die schon mehrfach verwendet wurde, antwortet nicht mehr,
das ist ja das seltsame.
Heute werde ich mal weiter versuchen es wieder zum Laufen zu bekommen,
und einen anderen PC nehmen, mal sehen ob es daran liegt.
Louis
Tach auch,
gibts irgendwo noch eine Demo wie man die neue DLL in Delphi Programme
einsetzt? Irgendwie klappt das so wie im alten Beispiel nicht mehr, da
hagelt es Fehlermeldungen..
Vor allem meckert er wegen
function GetAppCmd: WideString; stdcall;
function GetAppCmdResponse: WideString; stdcall;
function GetAppVersion(Masked: Bool = False): Integer; stdcall;
function GetACYInfo: WideString; stdcall;
Welchen Sinn haben diese Funktionen? Kann man das irgendwo nachlesen?
Louis
Das was die Methodennamen aussagen. Im Grunde geben sie die Werte zurück
die in meiner EXE aus der INI datei gelesen werden oder im GUI eingebbar
sind.
Dein Objekt das dieses Interface benutzt muß also bei
- function GetAppCmd: WideString; stdcall;
+ aus AVRootloader.ini -> AppCmd
- function GetAppCmdResponse: WideString; stdcall;
+ aus AVRootloader.ini -> AppCmdResponse
- function GetACYInfo: WideString; stdcall;
+ aus GUI das Edit "ACY Info"
- function GetAppVersion(Masked: Bool = False): Integer; stdcall;
+ aus GUI die Edits/UpDown Controls bei Versionsnummer
zurückgeben. Spezialfall ist GetAppVersion() und das kannst du weiter
oben im Thread nachlesen.
Es gibt keine weitere Dokumentation als die Beschreibung des aktuellen
Interfaces, leider. Das liegt aber auch daran das die Nachfrage gegen
Null geht und ich deswegen nicht Stunden meiner Freizeit opfern möchte.
Wenn dann würde ich eher das Demoprojekt auf den neusten Stand bringen
wollen da das weitaus weniger Zeit kostet als eine Doku.
Gruß Hagen
>Ich habe ja ein Backup des Bootloaders, auch die Originale Version aus>dem Backup, die schon mehrfach verwendet wurde, antwortet nicht mehr,>das ist ja das seltsame.
Dann würde ich aber eher auf ein Fehler in deinem PC-System, COM
Schnittstelle tippen. Denn wenn selbst die alten, schonmal
funktionierenden Module, mit den Backups nichts gehen, dann kann ja nur
dort die Ursache sein.
Falschen COM Port eingestellt ? Manchmal sind es wirklich solche
trivialen Fehler die man konsequent übersieht.
Gruß Hagen
Hagen schrieb:
> Wenn dann würde ich eher das Demoprojekt auf den neusten Stand bringen> wollen da das weitaus weniger Zeit kostet als eine Doku.
Au ja Hagen, das wäre toll. Ich weiß, auch das ist viel Aufwand...
Am einfachsten wäre natürlich die Source von Deiner GUI, dann wäre keine
DLL und keine Doku nötig. Aber Du wirst schon Deine Gründe haben, warum
Du die Sourcen nicht veröffentlichst.
Achim schrieb:
> dann wäre keine>> DLL und keine Doku nötig
Btw., wenn ich grade DLL höre: DLLs mit demselben Namen können nicht
alle beim System registriert werden, nur die zuerst veröffentlichte wird
verwendet.
Vielleicht liegt der Fehler einiger User hier?
Wenn die alte DLL nachträglich aufgespielt wurde (in anderem
Verzeichnis), dann bleibt die neuere, zuerst aufgespielte, gültig.
Evtl. mal alle DLLs löschen und nur die benötigte aufspielen, Neustart
des Rechners nicht vergessen!
;-)
Na ja, eine "normale" Dll wird ja nicht unbedingt beim System
registriert sondern i.d.R statisch oder dynamisch gelinkt, also zur
Laufzeit geladen. Man kann hier die Suchreihenfolge für Windows u.U.
ändern, aber die erste gefundene wird halt geladen, es sei denn man gibt
explizit die Datei vor.
Guten Tag...
Ich nutze seit einiger Zeit diesen Bootloader (in V6.0) für ein Projekt,
das programmieren über die beiliegende Windows-Software funktioniert
auch
wunderbar und alles könnte schön und gut sein.
Aber dann habe ich mir in den Kopf gesetzt, das Firmware-Update mit in
die
Software zu integrieren, mit der ich die Hardware konfiguriere, bevor
das
Ding Standalone seinen Dienst verrichtet. Praktischerweise holt sich
diese
Software (Delphi) das aktuellste ACY-File aus dem Internet.
Auch hier ist alles schön und gut, und nun kommt das aber:
Mit denselben Timeout-Parametern wie in der beiliegenden Flash-Software
will die DLL (v6) nicht mit dem Bootloader (ebenfalls v6, selbes Archiv
wie die DLL).
Nun habe ich den Thread mehrfachst durchforstet, finde aber nichts zu
meinem
konkreten Fehler:
Die DLL sendet ihren Ident (BOOTLOADER), die Antwort vom mega32 ist auch
richtig, nur "irgendwie" verschläft die DLL diese Antwort, oder erkennt
sie
nicht gültig an.. ein Spielen mit den Timeouts blieb 2 Stunden
"Intensivtest"
ohne Erfolg.
Die Ausgabe wurde mit (result.)Options = 1 ausgegeben.
Als Grundlage für das Delphiprogramm nehme ich die Interface-Unit, die
meisten Deklarationen habe ich aus den älteren Beispielen übernommen,
auf
den aktuellen Stand angepasst (Rückgabewert bei ProcessMessages, als
Beispiel) und natürlich die "fehlenden" Deklarationen ergänzt.
Alles erscheint funktionsgfähig, ich habe mal nur den Bootloader
aufgespielt,
die beiliegende Software connected/disconnected problemlos, nur die in
die
eigene Software eingebundene DLL mag nicht.
Interessant ist noch ein Punkt: ohne (result.)Baudrate := 115200; in der
Timeouts-Function bekomme ich mit der letzten geposteten Variante von
OpenCommunication() keine Antwort von der MCU, wenn ich es setze,
bekomme
ich eine ICOM: Read Error Exception (in der Delphi-IDE mit allen
"negativen"
Konsequenzen, wird das Programm per Doppelklick ausserhalb der IDE
gestartet,
kommt es zu keiner Meldung, und die Kommunikation von MCU an PC wird
zumindest
im Memo-Feld wie oben zitiert dargestellt.
Entweder sehe ich den Wald vor lauter Bäumen nicht mehr, oder irgendwas
anderes ist im argen.
Gruss,
Tim O.
>Die Ausgabe wurde mit (result.)Options = 1 ausgegeben.
Options = 2 setzen und/oder schauen das die Datei AVRootloader.dev auf
den neusten Stand ist. Dein Auszug oben sieht gut aus und die einzige
Erklärung ist die das die PC-Software aus den gesendeten Signaturdaten
nicht die Infos zum richtigen AVR aus der AVRootloader.dev Datei laden
kann.
Gruß Hagen
Moment..
Mit der Software geht es ja... benötigt die DLL denn überhaupt das DEV
File ?
Das connect-Problem hab ich mit der DLL, nicht mit der "originalen"
(=deiner) Software.
Der Auszug ist aus dem Memo-Feld, das zu debugging-Zwecken in meine
Software
gesetzt wurde.
GRuss,
Tim
... ja, die DLL braucht die DEV Datei ...
... mit derselben DEV Datei wie im Windows-Ordner in "meinen Ordner"
kopiert funktioniert es nun... argh.. seltsamerweise war sogar ne DEV
Datei vorhanden die ich sicher nicht hinkopiert hatte), nur 74 Byte
gross..
Gruss,
Tim
Mein Programm das ich mit den BOOTLOADER drauf geladen hat wird immer
nur 2 sek ausgefürt danach startet sich das Programm neu habt ihr ein
Lösungsvorschlag?
Hallo Hagen,
bin gerade mit Delphi User interface und Flashen von Acy Dateien
beschäftigt.
Funktioniert auch ganz gut indem ich einfach alles rübersende, aber ein
bisschen würde ich gern verstehen, was ich da mache.
"AVRootloader"
$06 (Bottloaderversion?)
$26 (??)
"ACYInfo"
$20 (Leerzeichen?)
"1.0.0.0" (Version Software)
$00 (Terminierung?)
$1E$xx$xx (Device Sign)
$00 (??)
$0F (??)
$06 (??)
$00 (??)
$2F (??)
Ab hier Befehle $FE $FE $XX $XX... Datenblöcke und Kommandos
1. Gibt es irgendwo eine Doku über den Aufbau der Datei?
2. das Kommando $FE hab ich nicht so ganz klar. Dahinter kommt $00 wenn
ich ins EEProm unverschlüsselt schreibe. In der ACY Datei aber $FE mit
24 Byte irgendwas und danach $FF. Also "$FE $?? (highbyte Size) (lowbyte
Size).
Wäre nett, wenn Du etwas die ?? aufklären könntest ...
Vielen Dank!
Hallo Hagen,
ich habe mit der DLL die gleichen Probleme wie Tim O. Mit Deiner
Anwendung
funktioniert alles. Mit der DLL bekomme ich einfach keine Verbindung.
Ich habe bei dem Demo-Programm aber nur den COM-Port verändert.
Als Prozessor verwende ich einen Mega328P mit 20MHz.
Ich würde die DLL gerne mit einem Konfigurationsprogramm an dritte
weitergeben. Darf man diese als Freeware weitergeben oder gibt es hier
eine Lizenzbestimmung.
Vielen Dank für Deine Antworten.
Marcus Stangl schrieb:> OK,ich weiß - eigentlich läßt sich Dein Bootloader ohne nennenswerte> Modifikationen verwenden. Das ist bei meinem Projekt (Funkvernetztes> Multicontrollersystem) so nicht möglich. Ich würde mich deshalb sehr> freuen wenn Du mir das Protokoll im Detail beschreiben könntest.
Hi Leute,
Ich habe ebenso ein Multiprozessor System mit 4 ATmega8 (bzw.
ATmega168) die ich am liebsten in einem Rutsch flashen würde. Der
Bootloader funktioniert so weit prima auf einem Controller.
Da ich die RXD und TXD Leitungn jedes Controllers über 1k Widerstände
miteinander verbunden habe dachte ich mir ich könnte jeden Controller
mit einer unterschiedlichen individuellen "Bootsign" versehen und dann
individuell mit der Programmiersoftware ansprechen.
Leider erzeugen alle Bootloader beim Empfang auf RXD auf TXD ein Signal
und der "angesprochene" kommt nicht durch.
Hat jemand eine bessere Idee wie man das geschickt lösen kann?
Grüsse,
Andreas
Hi Leute,
zum Thema Multicontroller-System bin mittlerweile etwas weiter gekommen.
Also: Bootloader im Zweidraht-Mode, alle RXD-Pins sind über 1k
Widerstände und alle TXD-Pins sind über 1k Widerstände zusammen
verbunden. Über Max232 gehen alle an PC.
Jeder Controller erhält eine eindeutige BootSign:
1
BootSign: .db "BOOTLOAD01" ; alle weitern haben BOOTLOAD02,03,04 etc.
Zudem werden noch in der AVRotloader.ini die BootSigns bekant gemacht:
1
[Signs]
2
0=BOOTLOAD01
3
1=BOOTLOAD02
4
2=BOOTLOAD03
5
3=BOOTLOAD04
Problem ist, dass jeder Controller mit "frischem" Bootloader und ohne
Firmware sofort auf die RXD Leitung reagiert und auf TXD antworted.
Geholfen hab ich mir damit, dass ich die Controller einzeln nacheinander
mit Bootloader und gleich darauf Firmware geflashed hab. Wenn auf allen
Controllern bereits eine Firmware läuft, dann antwortet nur der jeweils
angesprochene nach dem Reset. So weit funktioniert es also.
Die Progammier-Sequenz aller vier Controller läuft jetzt
folgendermassen:
1
1. Power-off
2
2. In AVRootloader.exe die jeweilige sign auswählen z.B. "Bootload01".
3
3. Connect to device klicken
4
4. Power-On (jetzt connected sich der jeweilige controller)
5
5. Program klicken
Diese Sequenz muss dann 4-mal wiederholt werden.
Daher hätte ich einen Wunsch:
Der Windows-App "AVRloader.exe" können zwar beim Aufruf Parameter
übergeben werden, allerdings erfolgt der Flash-Vorgang nicht
automatisch, mann muss trotzdem noch auf "Connect to device" und
"Program" klicken.
Praktisch wäre es wenn die AVRloader.exe auch als reines Kommandozeilen
Programm lauffähig wäre. Dann könnte man mit einem kleinen Batchfile die
Progammierung aller 4 Controller automatisieren. (Ähnlich wie mit der
"FBOOT.EXE" von Peter Dannegger).
Mit einem solch einfachem Batchfile wäre dann eine einfache
Programmierung aller 4 Controller möglich. Es muss nur 4-mal
hintereinander die Power-supply aus und eingeschalten werden.
@ Hagen: Siehst Du die Möglichkeit ein solches Kommandozeilen
"AVRloader.exe" zur Verfügung zu stellen?
Gruesse an alle!
Mensch! Jetzt fällt es mir wie Schuppen von den Augen...!
Wer lesen kann ist klar im Vorteil. Hab ich doch glatt den Schalter -A
überlesen...Jetzt klappts sogar mit Batchfile.
Dankeschön für den Tip! Mich zerreists fast vor Begeisterung für diesen
genialen Bootloader. Danke an alle die das Möglich gemacht haben und
insbesondere an den Hagen Re!
So gehts jetzt wunderbar:
Guten Tag ;)
hab ein kleines Problem mit dem Bootloader,
Wenn ich den SourceCode mit .set BootCodeSize = 0 Kompiliere klappt
Alles!
Wenn ich dann aber den Wert aus .cseg Eintrage also:
.set BootCodeSize = 8192
bricht er mit nem Error ab:
C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\AVRootloader.asm(75):
Including file 'C:\Programme\Atmel\AVR
Tools\AvrAssembler2\Appnotes\m8def.inc'
C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\AVRootloader.asm(143):
compile for ATmega8
C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\AVRootloader.asm(211):
Including file 'C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\AVRootloader.inc'
C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\AVRootloader.asm(216):
error: Overlap in .cseg: addr=0x0 conflicts with 0x0:0x1
C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\AVRootloader.asm(796):
Including file 'C:\Dokumente und
Einstellungen\chris\Desktop\AVRootloader\AVR\Special.inc'
Assembly failed, 1 errors, 0 warnings
Hat jemand nen Idee was da schief läuft?
lg
@Andreas:
>Problem ist, dass jeder Controller mit "frischem" Bootloader und ohne>Firmware sofort auf die RXD Leitung reagiert und auf TXD antworted.
Bist du dir wirklich sicher das der Bootloader schon antwortet obwohl er
nicht die korrekte BootSign empfangen hat ?
Normalerweise sollte der Bootloader nur auf RXD lauschen bis er die
korrekte "Loginsequenz" empfangen hat. Das sind par Nullen gefolgt von
#13 der BootSign und dadrüber eine 16Bit CRC berechnet.
Vorher darf er nichts auf TXD machen. Allerdings arbeitest du im 2-Draht
Modus und somit geht der Bootloader immer davon aus das er TXD auf
definierte Pegel ziehen muß.
Physikalisch würde ich also alle RXDs parallel verschalten ohne
Serienwiderstände. Es sei denn du möchtest auf Nummer sicher gehen und
verhindern das die AVRs am RXD Pin gegeneinander treiben, was bei
ausschließlicher Nutzung vom RXD als Input, eg. hochohmig, nicht
passieren sollte. Ergo: diese Serienwiderstände in RXD sichern nur gegen
Softwarefehler ab. TXD-Pins müssen mit Serienwiderstände geschützt
werden. Man könnte den Bootloader so umschreiben das er TXD als
Opendrain/-collector ansteuert und dann auf die Serienwiderstände
verzichten.
Eine andere Möglichkeit ist es vom MAX232 die RXD/TXD über Widerstand zu
verbinden und so ein 1-Wire mit invertierten Pegeln im Bootloader zu
benutzen. Die Serienwiderstände für die 1-Wire Pins an den AVRs
entfallen dann und du benötigst pro AVR nur noch einen Pin. Am MAX232
also RX/TX mit zb. 2k verbinden. Vom TX des MAX gehts dann an die AVRs.
Der 2k dient dann einerseits zur Verschaltung von TX/RX und andererseits
als Pulldown für TX da wir ja intern den 1-Wire-Modus mit invertierten
Pegeln benutzen.
Gruß Hagen
Hallo Hagen
wäre schön, wenn Du bei Gelegenheit auch mein Posting mal anschauen
könntest... Beitrag "Re: AVR-Bootloader mit Verschlüsselung"
Ist wohl untergegangen bei alle Posts hier momentan. ;)
Grüße
Hallo,
Hagen, erstmal vielen Dank für den Superbootloader mit dem schönen
Frontend!
Ich habe eine Frage:
Ich hab den Bootloader mit einem Mega88 im OneWire-Modus benutzt. Mein
Hauptprogramm ist sehr einfach und zählt nur cycles und schaltet
einzelne Ports (sowas wie ein Pulsgenerator). Ausgelöst wird es durch
INT0. Mit ISP programmiert reagiert es innerhalb der vorgesehenen Zeit
(~2mu s). Wenn die Bootloaderfirmware drauf ist, kommt es ab und an
(etwa bei jedem 20. Trigger) zu einem "Aussetzer", d.h. der Interrupt
wird anscheinend nicht ausgelöst. Kann sowas durch den Bootloader
kommen? Pollt der den Pin für die serielle Kommunikation?
Ich hab es jetzt mit Peter Daneggers Bootloader probiert, da tritt das
nicht auf. Und da wird ja ein reset benötigt zum flashen.
Nochmal vielen Dank!
Viele Grüße
Nicolas
Wenn du UseWDT=1 im Bootloader aktiviert hast dann benutzt dieser den
WatchDog Timer. In deiner Anwendung musst du diesen entweder
deaktivieren oder regelmäßig zurücksetzen (WDT Opcode). Andere
Alternative ist es mit UseWDT=0 den Bootloader zu kompilieren.
Allerdings würde ich dir das nicht anraten da mit dem WDT der Bootloader
viel robuster=sicherer arbeitet. Besonders eben wenn es zu
unvorhersehbaren Störungen kommt, die ja immer nur per WDT, als letztes
Mittel, behandelt werden können.
Peters Bootloader nutzt den WDT nicht soviel ich weiß.
So bald deine Anwendung angesprungen wurde ist der Bootloadercode
absolut inaktiv.
Gruß Hagen
Hallo Hagen,
bin echt ein großer Fan deines Bootloaders.
Leider hab ich gerade ein Problem damit.
Ich habe eine Schaltung, die ich mit Atmega8 und Atmega168 betreiben
will.
Je nach Softwareumfang.
Hab ein serielles Kabel nach der Onewire Anleitung umgebaut (Dioden).
Wenn ich den Bootloader für den Atmega8 erstelle und Flashe, klappt
alles wunderbar. Wenn ich aber das selbe für den Atmega168 mache, findet
AVRootloader den Controller wohl nicht.
Wie gesagt, die Schaltung und das Kabel sind immer die gleichen. Daran
kann es nicht liegen. Am µC kann es auch nicht liegen.
Wenn ich den Atmega168 in nem Entwicklerboard mit MAX232 und nicht
Onewire-Mode teste, klappt es auch.
Weiß leider nicht weiter.
Grüße,
Hige.
Hagen schrieb:> Beide Bootloader benutzen ein anderes BootSign
Die Controller befinden sich nicht gleichzeitig in der Schaltung. Ich
verwende entweder den Mega8 oder Mega168.
Mega8 funktioniert ohne Probleme.
Mega168 funktioniert leider nicht.
Hallo,
der Bootblock funktioniert soweit, Kommunikation läuft, SRAM, EEPROM
lesen und Flash löschen geht auch. Sobald ich aber was programmieren
will schmiert die Kommunikation ab (siehe Log).
Was muss ich ändern?
Gruß,
Daniel
Hm, schwierig. Mir fällt auf das du Timeout.Base mit 100ms ziemlich groß
gewählt hast, gehst du über einen USB-RS232 Wandler ? Ansonsten mal
Timeout.Flash von 25ms auf 50ms oder 100ms erhöhen.
Und was hat sich geändert so das es jetzt zumindest teilweise geht ?
Gruß Hagen
Ähm ? daniel == hige ?
Hallo Hagen,
gibt es eine moeglichkeit nach beenden des programms
AVRootloader.exe die RTS leitung auf High zu setzen ?
ich weis ist unueblich aber so kann das programmerkabel
angeschlossen bleiben. (1wire mit RTS auf reset)
ich rufe den bootloader in der kommandozeile auf und
da waehre sowas ganz praktisch, oder gibts das schon
und i habs uebersehen ?
vlg
Charly
Nee gibts nicht und würde auch nicht gehen. Die EXE muß die COM
Schnittstelle freigeben und setzt diese dann freundlicher Weise auf
ihren Zustand zurück den die EXE beim Öffnen vorgefunden hat. Das nennt
sich guter Ton und Rücksichtnahme auf andere Softwareentwickler ;) Davon
abgesehen habe ich die EXE so programmiert das sie die COM Schnittstelle
nur dann öffnet wenn sie benötigt wird und ansonsten anderen Programmen
zur Verfügung stellt.
Ich denke auch das dein Problem anders lösbar sein könnte.
1.) verzichte auf RTS and Reset
2.) benutze nur den 1-Wire-Pin am AVR exklusiv für den Bootloader
3.) überwache in alle deinen Programmen diesen Pin auf Aktivität und
wechsel per Watchdog Timeout in den Bootloader, heist führe einen
"Software-Reset" durch.
Konzeptionell bedeutet dies zwar das deine Anwendungsprogramme ein Teil
der Funktionalität des Bootloaders werden und du damit immer ein wenig
an Source extra pflegen musst, aber ich habe die Erfahrung gemacht das
das mit bischen Routine wirklich unproblematisch und am cleversten ist.
Und natürlich benötigst du dann nur noch einen Pin am AVR.
Gruß Hagen
Hallo Hagen,
danke für die schnelle Antwort. Ja, ich benutze einen USB-RS232 Wandler
(PL2303). Deswegen ist der Timeout bereits so weit oben. Den
Flashtimeout (und sämtliche anderen Timeouts) hab ich schon um
Dimensionen erhöht, hat leider nichts gebracht.
Der Fehler tritt nur bei Verify und Flash auf. :/
Gruß,
Daniel (Nicht Higi)
@Daniel:
Kannst du den USB-RS232 umgehen und eine echte RS232 verwenden ?
Die Fehlermeldungen sind sporadisch und immer wenn mir solche Probleme
gemeldet wurden lag es an Übertragungsfehlern (zb. USB Wandler VCC nicht
sauber) oder an den Treibern für den USB-RS232-Wandler.
Gruß Hagen
Zb. hier
>18.06.10-01:16:01-881 > Cmd.SetBuffer.ResCheck(2) Error: 00 operation>failed
Empfängt die EXE einen Fehlercode 00 den es als solches garnicht im
definierten Protokoll gibt.
Gruß Hagen
Hallo Hagen,
also ein Test mit einem anderen Board + µC ergab keinerlei Probleme.
Skeptisch wie ich war hab ich mal auf meinen luftverdrahteten RS232
Pegelwandler getippt.
Da ich eh ein wenig mit dem Ding unzufrieden war hab ich mir jetzt ein
paar Stunden Zeit genommen und einen neuen entworfen, geätzt, bestückt
und getestet (siehe Anhang, speziell für die Heimätzer mit
Tonermethode).
Fazit: geht immer noch nicht!
Also nochmal den anderen µC mit anderem Wandler ran - zack, geht. µC
getauscht, neuer Wandler dran, geht auch. Also musste es was mit dem
anderen µC zu tun haben. Und letztendlich Hand an den Kopf hau wars
mir klar.
16MHz Quarz und CKOPT nicht gesetzt! Aahh... :-)
Naja, jetzt letztendlich läuft alles 1A. Und immerhin hab ich jetzt
einen funktionierenden 2-Kanal-RS232-TTL-Pegelwandler mit optionalem
RTS/CTS.
Gruß und Dank
Daniel
@hige:
>ich hab in der avrootloader.asm nur den jeweiligen Controller>ausgewählt.
und dann
1.) BootCodeSize = 0 geändert
2.) erneut alles kompiliert
3.) aus CSeg Used im Messagewindow vom AVRStudio den Wert in
BootCodeSize geschrieben
4.) alles nochmals kompiliert
?
Gruß Hagen
PS: wenn nicht dann
5.) den Thread hier und die Readme nochmals gelesen ? ;)
@Hagen: Hauptsache letztendlich siegt Köpfchen über Frust. :)
Eine Frage... weißt du wie sich die Implementierung eines Bootloaders in
C größenmäßig zur Implementierung in Assembler verhält?
Gruß
Daniel
Es ist schwer objektive Aussagen zu machen. Das einizige Projekt bei dem
ich mal die gleiche Library in C und handmade Assembler programmiert
habe war meine Nokia Grafik Library. Entwickelt in WinAVR GCC einmal als
fast reiner C Source und einmal als handmade Assembler aber auch in
WinAVR GCC.
Ergebisse waren:
1.) Assembler war nur 50% so groß
2.) Assemblerversion war weitaus schneller in der Ausführung
3.) der nutzbare Funktionsumfang der Assemblerversion ist größer
Aber alle Punkte waren das Resultat der gewonnenen Freiheiten die man im
Assembler hatte. Zb. wurde in der Assemblerversion die
Aufrufkonventionen der einzelnen Funktionen und die dabei benutzten
Register/Stack usw. so manuell verteilt das es auch in den
übergeordneten Funktionen nicht notwendig war diese Register zu sichern.
Dann gibt es Zeichenroutinen zb. für Ellipsen und Linien die in C intern
mit 32Bit Variablen rechnen mussten. In Assembler konnte das aber so
optimiert werden das zb. nur 24Bit Berechnungen nötig waren. Desweiteren
gibt es verschiedene Funktionen die im Grunde sich nur in den Parametern
unterschieden und dann immer die gleiche Unterfunktion aufrufen. Hier
kann man im Assembler einigen an unötigem Code wegoptimieren indem man
die Einsprungpunkte quasi inmitten einer Basisfunktion legt. Das spart
im Vergleich zum C Compiler ne Menge an Stackrame, Register sichern,
CALLs und sogar RETs.
Alles zusammen genommen bewirkte also obige drei Resultate. Die dazu
benutzten Optimierungen zeigen aber auch deutlich das bewusst die
technologisch bedingten Schwachstellen des Compiliers ausgenutzt wurden.
Und somit ist der Vergleich C Copmiler vs. Mensch und Assembler unfair
und wenig aussagekräftig. Wir Menschen sind immer noch besser als die
Maschinen.
Übrigens falls das Argument kommt: Mit dem C Compiler wäre man
schneller. Das ist in diesem Falle nicht so gewesen. Da ich zuerst die C
Version gebaut habe, mich sowohl in C, den C Compiler Eigenheiten gut
auskennen und weiß was der C Compiler in Assembler hätte optimalerweise
erzeugen können, wusste ich bei der Asseblerversion von Anfang an was
ich wie exakt wollte. Das Schreiben der Assemblerversion hat mich weit
weniger Zeit, < 2 Tage, gekostet. Aber auch hier wieder das Argument das
es ohne die vorherige C Version und der Vorarbeit des C Compilers eben
nicht so gewesen wäre.
Den AVRootloader.asm Source habe ich nach den gleichen Regeln codiert
und ich bin mir ziemlich sicher das eine reine C Version mindestens
doppelt so groß wäre. Verzichtet man auch alle zusätzlichen Funktionen
in AVRootloader so ist dieser schon sehr kompakt, ca. 360 Bytes groß.
Selbst für einen erfahrenen ASM Programmierer dürfte es schwierig sein
da noch > 32 Bytes rauszuholen (und nur das macht Sinn auf Grund der
Pagesize des FLASHs).
Gruß Hagen
Und um Diskussionen über Sinn und Unsinn eines solchen Aufwandes
vorzubeugen. Ja, beim AVRootloader, der ja alle selbst programmierbaren
AVRs unterstützt ist es schon wichtig auch auf die geringste Codegröße
hin zu programmieren. Als Zielsetzung wars von Anfang an auch die
kleinen AVRs angestrebte oberste Priorität. Damit ist die Wahl der
Mittel defakto entschieden.
Gruß Hagen
Hallo Hagen,
ich will mit der Frage sicher nicht die alte Diskussion vom Zaun
brechen. Beide Sprachen haben ihre Daseinsberechtigung.
Worüber ich mir allerdings Gedanken mache, ist, inwiefern ein ASM
Projekt mit einem in C geschriebenen Projekt erweitert werden kann.
Ich kenne zwar Projekte in einzelne Funktionen/teile dank Assembler auf
Geschwindigkeit oder Größe optimiert wurden, jedoch kenn ich es bisher
nicht, dass eine handgestrickte ASM Software einige in C codierte
Routinen einbindet. Ich kenne zwar Assembler aber da ich nie damit
arbeite kann ich mir auch keinen Eindruck davon machen, ob das möglich
wäre. Wahrscheinlich müsste man alle "notwendigen" Register vor dem
Aufruf der C-Routine wegsichern, quasi eine Stack-Implementierung, dann
den assemblierten C-Code aufrufen, und später die Register rücksichern.
Gruß,
Daniel
Nö das geht in beide Richtungen. Klar ist jedoch das man die
Aufrufkonventionen festlegen und beachten muß. Aber das ist nicht das
Problem da das auch bei Assemblerstücken innerhalb eines C Projektes der
Fall ist.
Ich sehe es so: beides sind Werkzeuge, ein Mittel um ein Ziel zu
erreichen. Die unterschiedlichen Möglichkeiten beider Werkzeuge erhöhen,
clever benutzt, doch nur die Flexibilität die wir uns leisten können um
eben das Ziel zu erreichen.
Eine Diskussion über das für und wider, ob C, Delphi, Assembler, VHDL
usw. exitiert für mich garnicht, bzw. ist am Thema vorbei.
Am besten man beherrscht alle und nutzt sie als Mittel zum Zweck, es
sind eben nur Werkzeuge. Das wäre ja so als ob man sich streitet das nun
die Statue der Athene viel besser künstlerisch aussehen würde wenn man
statt Hammer und Meisel einen elektrischen Vorschlaghammer genommen
hätte. Der künstlerische Anspruch, warum uns die Athene gefällt, hat
doch nichts mit den benutzten Werkzeugen primär zu tun. Punkt.
Gruß Hagen
Hagen schrieb:> und dann>> 1.) BootCodeSize = 0 geändert> 2.) erneut alles kompiliert> 3.) aus CSeg Used im Messagewindow vom AVRStudio den Wert in> BootCodeSize geschrieben> 4.) alles nochmals kompiliert>> ?
Ja, so mach ich es immer. Nutze deinen Bootloader nicht zum ersten mal.
Verstehs auch nicht. Werd die Onewire-Verbindung mal in einem anderen
Board testen.
Grüße Hige
Moin moin Hagen & Co.
nachdem sich Hagen 'weigert' RTS auf High zu lassen beim
beenden des Bootloaders damit der AVR weiter laeuft habe
ich nach Lösungen gesucht und gefunden, siehe Schaltplan
i hoffe der ein oder andere kann es gebrauchen...
vielen Dank nochmals an Hagen fuer den super Bootloader
vlg
Charly
@Charly:
>nachdem sich Hagen 'weigert' RTS auf High zu lassen beim beenden des>Bootloaders
ich weigere mich ja nicht, es ist technisch nicht sauber oder sogar
möglich weil das Betriebsystem nicht mitspielt. Wird der Bootloader
beendet so werden auch alle genutzten Resourcen wieder freigegeben.
Würde ich das nicht explizit machen dann würde spätestens das OS dies
für mich machen. Danach ist die COM Schnittstelle wieder frei für andere
Software und ich kann ja schlecht deren Funktion beeinflussen.
Gruß Hagen
@Hagen
das 'weigern' war nicht als vorwurf gemeint, ich hatte deine Argumente
verstanden und deswegen nicht weiter nachgefragt und nach einer anderen
Loesung gesucht, und gefunden.
Ich verwende den Bootloader per Komandozeile und so ist es halt
praktisch wenn der Bootloader einfach alles uebernimmt und ich in
meiner Soft es nicht beruecksichtigen muss, halt was fuer 'Faulpelze'
wie ich ;)
vlg
Charly
Hi,
nach dem mir bei PeDas fastboot wichtige Features fehlen bin ich auf
AVRootloader gestoßen.
Von der Featureliste und Konfigurierbarkeit ist der ja ein Traum.
Leider bekomme ich ihn nicht zum laufen.
will ihn auf einem mega168 mit 16Mhz Quarz bekommen.
ich habe ein paar configs geändert, ihn übersetzt, die Größe
eingetragen, noch mal übersetzt geflasht und die fuses gesetzt (e/h/l
0x04/0xDF/0xF7)
(angepasstes Projekt im Anhang)
allerdings kann ich nicht mit dem Bootloader verbinden.
In dem Tool habe ich die Baudrate eingestellt und connect geklickt, dann
am Target ein Reset ausgeführt.
Dann versucht er ewig eine Verbindung herzustellen.
Ließ dir mal den Thread hier durch.
1.) in AVRootloader.ini [Timeouts] Options=2 setzen um Debug Infos
anzuzeigen
2.) einen Connect probieren
3.) den Output in der Protokollpage hier posten
Gruß Hagen
Hagen Re schrieb:> Ließ dir mal den Thread hier durch.
ich habs mit ein paar Suchworten probiert.
aber ein 2 Jahre, 6 Sofftwareversionen und 600-Beiträge alten Thread
komplett durchzuarbeiten bringt halt meistens auch nicht so viel, da
auch eine Menge veraltete Infos drinstehen.
Das einfachste wäre, wenn die relevantesten Infos im Artikel
zusammengetragen wären.
>> 1.) in AVRootloader.ini [Timeouts] Options=2 setzen um Debug Infos> anzuzeigen> 2.) einen Connect probieren> 3.) den Output in der Protokollpage hier posten
Am Output ändert das irgendwie gar nix.
es ist weiterhin nur folgendes zu lesen:
11.07.10-07:54:20-093 > Connecting on port COM4...
zwischendurch habe ich mehrere Male am Target die Stromzufuhr
unterbrochen
bis ich dann irgendwann selbst auf abort klicke
11.07.10-07:55:27-656 > aborted by User
Hallo Hagen,
schade, falls Du doch noch mal Zeit/Lust haben solltest ein bisschen
Doku zu machen, würde ich Dich an mein Post vom 30.04 erinnern:
[Beitrag "Re: AVR-Bootloader mit Verschlüsselung"]
@Vlad
>Ließ dir mal den Thread hier durch.
Damit meinte ich das deine Infos einfach zu wenige sind um dir helfen zu
können. Also fange ich nochmal an:
Wie sieht deine Hardware aus ?
Laut deiner Konfiguration des Bootloaders gehe ich davon aus das du
- 19200 Baudrate hast
- das du keinen RS232 Pegelwandler benutzt
- das du 2-Wire RS232 benutzt
- das dein AVR mit 16MHz läuft und auch die Fuses entsprechend gesetzt
wurden
Da das eine ziemlich ungewöhnliche Konfguration ist gehe ich davon aus
das du einen Pegelwandler benutzt.
Setze:
.equ UseAutobaud = 1
.equ UseUartInvert = 1
UseAutoBaud nimmt dir nicht viel mehr an FLASH weg, dafür macht es den
Bootloader unabhängig von einer festen Baudrate und unabhängig von
falschen Quarzen und falschen Quarzfusebits. UseAutoBaud=0 ist also nur
für Spezialanwendungen, bei denen der User weiß was er tut, interessant.
UseUartInvert muß 1 sein wenn mit einem Pegelwandler wie den MAX232 oä.
gearbeitet wird.
In meinem letzten Posting sagte ich: Poste hier dein Protokoll Auszug,
dann kann ICH mehr erkennen. Wo ist er ?
Ändere auf [Timeout] Options=1 und teste dann nochmal.
Gruß Hagen
@Achim: ja ich weiß :| und ich arbeite dran. Da ich heute nicht
sonderlich viel zu tun habe, außer das ich mal ausspannen wollte, sehe
ich mal zu deine Fragen zu beantorten. Schicke dir dann eine PN.
Gruß Hagen
@Achim: du bist ja garnicht angemeldet, PN fällt flach.
"AVRootloader"
$06 (Bottloaderversion?)
$26 (??)
Das ist der File Format Identifier. String AVRootloader gefolgt von 1
Byte Haupotversionsnummer -> 6. Am Ende $26 = EOF = End Of File. Ein
ASCII Text Editor/Viewer zeigt nur bis hierhin Daten an.
"ACYInfo"
$20 (Leerzeichen?)
"1.0.0.0" (Version Software)
$00 (Terminierung?)
Ein benutzerdefeinierbarer Info-String über diese Datei. ACYInfo wird im
GUI durch den User eingetragen. Wird Versioning benutzt so steht mit
Leerzeichen getrennt die eingestellte Version aus dem GUI mit in diesem
String. Null terminiert.
$1E$xx$xx (Device Sign)
$00 (??)
$0F (??)
$06 (??)
$00 (??)
$2F (??)
- 4 Bytes Device Signature
- 1 Byte Anzahl der FLASH Pages die der Bootloader benutzt
- 1 Byte Hauptversion des Bootloaders
- 2 Bytes Flags, bitkodierte Informationen über die Fähigkeiten des
Bootloaders, zb. Verschlüsselung usw.
Die Infos sind unverschlüsselt und im Grunde identisch mit dem was der
Bootloader im AVR bei einem Connect zurück meldet. Das GUI benutzt beim
flshen einer ACY diese Infos und vergleicht sie mit denjenigen die sie
vom AVR geliefert bekommt. Nur wenn diese übereinstimmen wird das GUI
das ACY flashen. Dh. gleicher AVR, Bootloader usw. mit der die ACY
erzeugt wurde und der aktuell programmiert werden soll.
> Ab hier Befehle $FE $FE $XX $XX... Datenblöcke und Kommandos
Korrekt.
>2. das Kommando $FE hab ich nicht so ganz klar. Dahinter kommt $00 wenn>ich ins EEProm unverschlüsselt schreibe. In der ACY Datei aber $FE mit>24 Byte irgendwas und danach $FF. Also "$FE $?? (highbyte Size) (lowbyte>Size).
Bei Verschlüsselten Daten muß der AVR erstmal die Entschlüsselung
initialisieren. Dazu wird ein verschlüsseltes Initialisierungs-Packet
benutzt. Dieses Packet ist entweder 16 Nutzbytes oder 24 Bytes groß.
- 8 Bytes Zufall, quasi ein innerer zufälliger Initialisierungvektor =
IV. Nirmalerweise überträgt man den in vielen Verfahren unverschlüsselt.
Ich bevorzug dies verschlüsselte Variante, der Rest ist aus
kryptographischer Sicht identisch zu den gewohnten Verfahren
Nun unterscheidet es sich jenachdem ob man Versioning benutzt oder
nicht.
Ohne Versioning:
- 2 Bytes Signature des AVRs
- 1 Byte Bootloader Version
- 1 Byte Anzahl FLASH Pages des Bootloaders
- 4 Bytes, die ersten 4 Bytes des Schlüssels
Mit Versioning:
- 4 Bytes weiterer Zufall, ergibt 12 Bytes Zufallsblock am Anfang des
Packetes
- 4 Bytes die Versionsnummer aber maskiert zur Überprüfung
- ab hier wieder gleich zu oben
- 2 Bytes Signature des AVRs
- 1 Byte Bootloader Version
- 1 Byte Anzahl FLASH Pages des Bootloaders
- 4 Bytes, die ersten 4 Bytes des Schlüssels
Dieser 16/24 Bytes Block wird verschlüsselt übertragen. Kommando
$FE$FE, 2 Bytes LÄnge der nachfoldenenden Daten, 16 Bytes Daten
Da der Verschlüsselungalgo., sprich der modifizierte
Doppel-CBC-Feedback-Cipher-Mode nicht zurückgesetzt wird heist dies das
sich die verschlüsselten 8/12 Bytes Zufallsbytes komplett durch die
ganzen verschlüsselten Datenblöcke fortpflanzen. Würde man also die
exakt gleiche HEX Datei mit exakt gleichen Info wie Passwort usw.
mehrfach in ACY Dateien compilieren so würde sich denoch jedesmal ein
komplett anderes verschlüsseltes Resulat ergeben. Das verhindert eine
ganze Reihe von kryptologischen Angriffen.
Nachdem der AVR nun dieses 16/24 Bytes große verschlüsselte Packet
empfangen hat wird er es erstmal entschlüsseln. Damit wird er sich, eg.
sein internes Feedback Register auch mit den richtigen Zufallswerten
synchronisieren. Er vergleicht erstmal die letzten 4 Bytes des
entschlüsselten Datenblockes mit den ersten 4 Bytes seinen Passwortes.
Sollten diese nicht identisch sein so wurde entweder mit falschem
Passwort verschlüsselt, der AVR benutzt ein falsches Passwort zur
Entschlüsselung, der Datenstrom wurde falsch übertragen (wir nutzten
extern nur eine 16 Bit CRC) mit dem XTEA nutzen wir eine 64 Bit CRC die
aber auf 32Bit truncated ist (unser 4 Bytes Vergleich mit dem Passwort).
Dieser 4 Bytes Vergleich erfolgt immer, egal ob Init-Packet oder später
die einzelnen verschlüsselten Datenpackete empfangen wurden.
Beim Init-Packet vergleicht der AVR nun die Signature, Version,
BootPages mit seinen eigenen. Stimmen sie nicht überein so gibts wieder
einen Fehler. Bei jedem Fehler den die Entschlüsselung meldet wird jeder
Befehl der verschlüsselt sein kann gesperrt. Dh. nur mit einem korrekt
empfangenen und entschlüsselten Init-Packet arbeitet die interne
Bootloader-FSM weiter ansonsten blockiert sie.
Wurde mit Versioning gearbeitet so lädt nun der AVR die entschlüsslte
Versionsmaske und vergleicht sie mit der im AVR gespeicherten Version.
Je nach Maskeneinstellung führt dies dazu das der AVR zb. erkennt das
schon eine neuere Version installliert wurde und verhindert dann
wiederum durch einne Fehlercode das man auf Downgrade machen kann.
So damit wäre die Initialisierung der Entschlüsselung im AVR
abgeschlossen.
Da alle wichtigen Infos auch im ACY verschlüsselt gespeichert wurden,
sie nur vom Erzeuger der ACY und des AVR ver/entschlüsselt werden
können, ist das ziemlich sicher. Auch wenn man die unverschlüsselten
Daten im Header der ACY Datei manipulieren würde so würde man nur das
GUI austricksen damit aber nicht den AVR Bootloader.
Wenn also mit Verschlüssleung gearbeitet wird so überprüft der AVR
selber ob die ACY Daten für ihn die richtigen sind.
Wird ohne Verschlüsselung gearbeitet so überprüft das das GUI.
Sonstige Kommandos im ACY File:
- CmdSetAddr: $FF, 3 Bytes Addresse, setzt die EEPROM,FLASH,SRAM
Schreib/Leseadresse
- CmdWriteBuffer (unverschlüsselt): $FE00, 2 Bytes Datengröße, Daten
- CmdWriteBuffer (unverschlüsselt): $FE01, 2 Bytes Datengröße, Daten,
dieses Kommando schreibt die empfangenen Daten in den SRAM an die mit
CmdSetAddr übergebenen Speicheradresse. Siehe unten.
- CmdWriteBuffer (verschlüsselt): $FEFF, 2 Bytes Datengröße immer durch
8 teilbar, Daten
- CmdWriteBuffer (verschlüsselt Init): $FEFE, 2 Bytes Datengröße
(16/24), Daten
- CmdWriteFlash: $01, 1 Byte Wiederholungszähler, diese Kommando
schreibt die mit CmdWriteBuffer empfangenen und eventl. entschlüsselten
Daten an die mit CmdSetAddr angegebenen FLASH Addresse. Dabei werden
soviele Bytes geschrieben wie mit CmdWriteBuffer empfangen wurden. Der
Wiederholungszähler gibt an wie oft diese Operation nacheinander
wiederholt wird, wobei aber der internen Addresszähler immer weiter
inkrementiert wird. Man könnte also mit CmdWriteBuffer() nur das Zeichen
$AA senden. Dann mit $01 $80 dieses Zeichen 128 mal in den FLASH
schriben lassen, also einen Buffer der aus 128 mal $AA bestünde. Somit
unterstützt das Bootloader Protokoll/Dateiformat etc.pp. schon eine
primitve Komprimierung die redundante Daten entfernen kann.
- CmdEraseFlash: $02, 1 Byte Page Anzahl. Löscht die Flash Pages ab
CmdSetAddr Addresse.
- CmdVerifyFlash: $03, 1 Byte Page Anzahl. Die mit CmdSetBuffer
empfangenen/entschlüsselten Daten werden mit den Daten im FLASH ab
Addresse mit CmdSetAddr vergliche
- CmdWriteEEPROM: $05, 1 Byte Wiederholungszähler, siehe CmdWriteFlash
Das sind die Kommandos die in einem ACY vorkommen dürfen. Der Bootloader
versteht zusätzlich noch:
- CmdKeepAlive: $FD, $00, diese Kommando ist defakto garnicht
implementiert. Das GUI sendet es im Interval < 2 Sekunden ab, der
Bootloader empfängt es als illegales Kommando, sendet Fehler zurück,
setzt aber auch intern seinen WDT zurück bei jedem
Kommando/Kommunikation. Somit erzielen wir zwei Vorteile: der AVR
Bootloader startet autom. die eigene Anwendung wenn sich das GUI nicht
mehr meldet. Das GUI trennt autom. eine Verbindung wenn der AVR sich
nicht mehr meldet.
- CmdReadEEPROM: $04, 1 Byte Anzahl Bytes, lese aus EEPROM
- CmdReadSRAM: $06, 1 Byte Anzahl Bytes, lese den SRAM
- CmdWriteSRAM: wird über CmdWriteBuffer() simuliert. Man setzt mit
CmdSetAddr() erstmal die Startaddresse und mit CmdWriteBuffer() werden
dann diese Daten ab dieser Address gespeichert. Dh. ab Address 0x0000
bis 0x001F liegt das Registerfile. Man überschreibt somit die internen
Register des AVRs. Danach kommen die Ports usw. dh. man überschrebt die
Ports usw. Danach kommt der normale SRAM in den man schreiben kann.
Mit CmdRead/WriteSRAM: kann man also aus dem GUI heraus den AVR komplett
steuern. Das ist so wie ein kleiner Mini-Debugger. Deshalb gilt:
nieamls UseSRAM=1 setzen wenn man Kryptographie benutzt da das eine
Hintertüt für einen Angreifer öffnen könnte.
Im Gegensatz zu den Kommandos in der ACY Datei werden alle Kommanods und
Daten während der Kommunikation von/zum AVR mit einer 16 Bit CRC
abgesichert. Es gibt also 2 oder 4 Bytes Kommandos. Danach kommen 2
Bytes CRC üder diese Kommandos. Wenn Daten folgen dann kommen jetzt die
Daten und darüber am Ende wieder 2 Bytes für die 16 Bit CRC. Das ist
auch beim Lesen vom SRAM/EEPROM so.
Werden verschlüsselte Datenblöcke gesendet, also nachdem man die
Initialisierung hinter sich hat so sind das immer glatt durch 8 teilbare
Packetlängen. Es werden die Daten verschlüsselt gesendet mit einem 8
Bytes abschließenden Datenpacket. Dieses Datenpacket ist so aufgebaut
- 3 Bytes Addressfeld, das ist die Addressinformation die man
normalerweise mit CmdSetAddr sendet. Bei verschlüsselter Kommunikation
steht diese Addresse natürlich hier in verschlüsselter Form.
Manipulationen durch umsortieren der Addressen also ausgeschlossen
- 1 Bytes Daten-Längen-Korrektur-Byte. Alle verschl. Datenpackete müssen
8 Bytes lang sein. Sollten Daten verschl. werden die nicht ein
mehrfaches von 8 Bytes lang sind so werden diese mit Zufallsdaten
aufgefüllt so das das Packet ein Mehrfaches von 8 Bytes lang wird. Die
Anzahl der dafür nötigen Zufallsbytes kann von 1 bis 7 gehen und steht
in diesem Datenfeld. Nach empfang aller Datenpackete und deren
Entschlüsselung wird das interne Daten-Längen-Register durch Subtraktion
mit diesem Korrekturbyte korregiert.
- 4 Bytes Prüfsumme = ersten 4 Bytes vom Passwort
Der AVR empfängt also das letzte 8 Bytes Packet, entschlüsselt es und
vergleicht wiederum die 4 Bytes Prüfsumme. Gibts einen Fehler gilt das
oben schon gesagte. Ansonsten nimmt der die Addressinfos und speichert
die in sein internes bis zu 3 Bytes großes Addressregister.
So das wäre im Grunde das komplette Protokoll.
Gruß Hagen
PS: Ich habe nicht nochmal Korreturgelesen, sorry, Schreibfehler gehören
euch
Hagen Re schrieb:> @Vlad>>>Ließ dir mal den Thread hier durch.>> Damit meinte ich das deine Infos einfach zu wenige sind um dir helfen zu> können. Also fange ich nochmal an:>> Wie sieht deine Hardware aus ?>> Laut deiner Konfiguration des Bootloaders gehe ich davon aus das du> - 19200 Baudrate hast
ja, die hatte ich runtergesetzt um Verbindungsprobleme auszuschließen
> - das du keinen RS232 Pegelwandler benutzt
richtig
> - das du 2-Wire RS232 benutzt
2-Wire UART um genau zu sein (USB-UART-Adapter)
> - das dein AVR mit 16MHz läuft und auch die Fuses entsprechend gesetzt> wurden
jep, die passen.
wenn ich ein eigenes Programm draufflashe klappt die Kommunikation mit
19200Baud reibungslos
>> Da das eine ziemlich ungewöhnliche Konfguration ist gehe ich davon aus> das du einen Pegelwandler benutzt.
nein, es ist wirklich eine UART
wieso ungewöhnlich?
es ist ein atmega168 mit 16Mhz in Minimalbeschaltung (reset, pullup,
quarz+C, Abblock-C)
>> Setze:>> .equ UseAutobaud = 1
habe ich auch schon probiert.
> .equ UseUartInvert = 1>> UseAutoBaud nimmt dir nicht viel mehr an FLASH weg, dafür macht es den> Bootloader unabhängig von einer festen Baudrate und unabhängig von> falschen Quarzen und falschen Quarzfusebits. UseAutoBaud=0 ist also nur> für Spezialanwendungen, bei denen der User weiß was er tut, interessant.
die Autobaudrate macht den Unterschied zwischen 512Byte bootloader und
1k, deswegen wollte ich die ausschalten.
Wie gesagt, hatte ich es aber auch schon mit probiert - mit den selben
Symptomen.
>> UseUartInvert muß 1 sein wenn mit einem Pegelwandler wie den MAX232 oä.> gearbeitet wird.>> In meinem letzten Posting sagte ich: Poste hier dein Protokoll Auszug,> dann kann ICH mehr erkennen. Wo ist er ?
mit Protokoll meinst du doch den Protocol-Tab, oder?
da tauchen wirklich nur diese beinde Zeilen auf.
>> Ändere auf [Timeout] Options=1 und teste dann nochmal.
ok, jetzt ist das ganze etwas gesprächiger:
1
11.07.10-12:09:17-218 > Connecting on port COM4...
2
11.07.10-12:09:17-218 > Timeout.Connect = 50 ms
3
11.07.10-12:09:17-218 > Timeout.Base = 50 ms
4
11.07.10-12:09:17-218 > Timeout.Erase = 10 ms
5
11.07.10-12:09:17-218 > Timeout.Flash = 15 ms
6
11.07.10-12:09:17-218 > Timeout.Eeprom = 10 ms
7
11.07.10-12:09:17-218 > Timeout.Buffer = 1 ms
8
11.07.10-12:09:17-218 > Timeout.AppCmd = 0 ms
9
11.07.10-12:09:17-218 > Timeout.KeepAlive = 250 ms
Und nochmal danke für die Zeit, die du dir für die Erklärungen nimmst.
Gruß,
Vlad
Edit:
Im Anhang mal die Fuses-Eisntellungen.
Die sollten aber eigentlich passen.
Mensch Kommando 0x00 vergsssen:
- CmdRestart: 0x0000, startet den Bootloader neu
- CmdStartApp: 0x00??, startet die geflashte Anwendung
Ist ein 2 Bytes Code. CmdRestart -> 0x0000 würde mit 2 Bytes CRC also
0x00 0x00 0x00 0x00 sein, da 16 Bit CRC über 0x0000 = 0x0000 ist.
Somit werden alle sich wiederholenden 0x00 Bytes Sequenzen autom. als
Soft-Reset des Bootloaders interpretiert. Der Bootloader startet dann
normalerweise wieder seine AutoBaud Detektion, ermittelt Baudrate neu,
prüft BootSign erneut und sendet bei Erfolg seine Informationen wie
BootInfo erneut zum GUI. Somit erklärt sich auch warum man kein extra
Kommando für die Ermittlung der Fähigkeiten des Bootloaders benötigt,
also Ermitteln von FLASH/EEPROM/Version usw.
Zudem hat man so, auch bei falschen Baudraten einen Weg wie der
Bootloader aus seiner FSM wieder neu gestartet werden kann. Die
Wahscheinlichkeit ist groß das bei falscher Baudrate und dem Senden von
wiederholten 0x00 der Bootloader das denoch als CmdRestart Kommando
erkennen kann und somit neu startet, neu Baudrate usw. usw. wie oben
schonmal erklärt.
Letzendlich dient das und der WDT (CmdKeepAlive), UseResetDelay=1 usw.
alles dazu den Bootloader äußerst stabil zu machen.
Wird als 2. Byte <> 0x00 benutzt so wird die Applikation gestartet.
Gruß Hagen
>> - das du keinen RS232 Pegelwandler benutzt>richtig>> - das du 2-Wire RS232 benutzt>2-Wire UART um genau zu sein (USB-UART-Adapter)
Gut dann benutzt du also einen RS232-Pegelwandler, nicht einen MAX232
aber einen USB-RS232.
Es muß UseUartInvert=1 gesetzt werden.
Aus dem Protokoll erkennt man das nichts empfangen wird. Überprüfe
1.) USB Treiber
2.) virtuellen COM4 Port, oder benutze mal AUTO
3.) sind RX/TX an PD0 und PD1 richtig ?
4.) Oszi an RX/TX dran und schauen
5.) Debug-Trick
- UseRS485=1 setzen
- DE_PORT und DE setzen auf einen freien Pin oder auf einen an dem eine
LED dran ist
- UseRS485Invert=0 oder 1 setzen je nach LED Polarität
Wenn der AVR nun korrekte Daten empfangen hat wird der den in DE_PORT/DE
konfigurierten Pin, deine LED beim Senden ein/ausschalten. Du siehst
also wenn die LED flackert das der Bootloader auf den gesendeten Connect
Versuch reagieren möchte.
6.) BootSign in GUI und AVRootloader.asm identisch ? In ARRootloader.asm
am Ende des Sources. Denke das ist bei dir der Fall, BOOT im ASM und
BOOT im Protokoll.
7.) verbinde mal RX/TX des USB-RS232 miteinander. Dann schaue dir
nochmal das Protokoll beim Connect an. Du solltest dort den gesendeten
Ident als empfangenen sehen. Wenn nicht, USB-RS232 Scheiße, dort Fehler
suchen...
Gruß Hagen
>die Autobaudrate macht den Unterschied zwischen 512Byte bootloader und>1k, deswegen wollte ich die ausschalten.
Darum kümmern wir uns später, jetzt erstmal UseAutoBaud=1 setzen, bis es
bei dir funktioniert.
Deine Fuses sehen erstmal richtig aus, auch wenn ich die Software nicht
kenne. Im Compiler-Message-Window vom AVRStudio siehst du nach der
Compilation welche Fuses (BOOTSZ) du setzen musst.
Gruß Hagen
Hagen Re schrieb:>>> - das du keinen RS232 Pegelwandler benutzt>>richtig>>> - das du 2-Wire RS232 benutzt>>2-Wire UART um genau zu sein (USB-UART-Adapter)>> Gut dann benutzt du also einen RS232-Pegelwandler, nicht einen MAX232> aber einen USB-RS232.
nein, gar kein RS232. einen reinen USB-UART
um genau zu sein:
http://www.recursion.jp/avrcdc/>> Es muß UseUartInvert=1 gesetzt werden.>> Aus dem Protokoll erkennt man das nichts empfangen wird. Überprüfe> 1.) USB Treiber> 2.) virtuellen COM4 Port, oder benutze mal AUTO
beides funktioniert. Wenn ich den Adapter kurzschließe, bekomme in einem
Terminalprogramm das echo
> 3.) sind RX/TX an PD0 und PD1 richtig ?
Ich habs an die Hardware-UART-Pins angeshlossen (PD0, PD1).
> 4.) Oszi an RX/TX dran und schauen
hab kein Oszi
> 5.) Debug-Trick>> - UseRS485=1 setzen> - DE_PORT und DE setzen auf einen freien Pin oder auf einen an dem eine> LED dran ist> - UseRS485Invert=0 oder 1 setzen je nach LED Polarität>> Wenn der AVR nun korrekte Daten empfangen hat wird der den in DE_PORT/DE> konfigurierten Pin, deine LED beim Senden ein/ausschalten. Du siehst> also wenn die LED flackert das der Bootloader auf den gesendeten Connect> Versuch reagieren möchte.>> 6.) BootSign in GUI und AVRootloader.asm identisch ? In ARRootloader.asm> am Ende des Sources. Denke das ist bei dir der Fall, BOOT im ASM und> BOOT im Protokoll.
ja, die sind identisch
>> 7.) verbinde mal RX/TX des USB-RS232 miteinander. Dann schaue dir> nochmal das Protokoll beim Connect an. Du solltest dort den gesendeten> Ident als empfangenen sehen. Wenn nicht, USB-RS232 Scheiße, dort Fehler> suchen...>> Gruß Hagen
wenn ich RX/TX an meinem UART-Adapter kurzschliße und das Tool benutze,
kommt folgendes Log:
1
11.07.10-13:44:49-484 > Connecting on port COM4...
2
11.07.10-13:44:49-484 > Timeout.Connect = 50 ms
3
11.07.10-13:44:49-484 > Timeout.Base = 50 ms
4
11.07.10-13:44:49-484 > Timeout.Erase = 10 ms
5
11.07.10-13:44:49-484 > Timeout.Flash = 15 ms
6
11.07.10-13:44:49-484 > Timeout.Eeprom = 10 ms
7
11.07.10-13:44:49-484 > Timeout.Buffer = 1 ms
8
11.07.10-13:44:49-484 > Timeout.AppCmd = 0 ms
9
11.07.10-13:44:49-484 > Timeout.KeepAlive = 250 ms
Merkwürdig finde ich, dass da noch ein 10 60 dahinter kommt (\n>)
Aber da er in den 1-Wire-Modus wechselt scheint das normal zu sein.
Das sollte für ein Funktionieren der Schnittstelle sprechen, oder?
Hagen Re schrieb:> Deine Fuses sehen erstmal richtig aus, auch wenn ich die Software nicht> kenne. Im Compiler-Message-Window vom AVRStudio siehst du nach der> Compilation welche Fuses (BOOTSZ) du setzen musst.
jep, das habe ich gesehen und gemacht.
Das Tool ist der AVR8-Burn-O-Mat, das ist eine JAVA-GUI für avrdude.
Edit:
Ach so, die Sache mit dem RS485 debug-Trick:
da passiert überhaupt nix, egal, ob invert, oder nicht (die LED ist über
den Pin nach GND geschalten)
Ich habe das gefühl, dass die ich entweder beim Bauen, oder beim Flashen
irgendwas falsch mache.
Hast du einen kommerziellen USB-RS232-Wandler oder vielleicht sogar
einen echten COM Port an deinem Rechner ? Wenn ja probier es mal damit
aus, einfach um Fehler in der exotischen HW ausschließen zu können. Sehr
oft, ja sogar am häufigsten lag es nämlich bisher immer an der SW oder
HW der USB-RS232 Wandler.
>Merkwürdig finde ich, dass da noch ein 10 60 dahinter kommt (\n>)
Ist die 16 Bit CRC Prüfsumme, die sichtbar wird beim Empfangen.
>Aber da er in den 1-Wire-Modus wechselt scheint das normal zu sein.>Das sollte für ein Funktionieren der Schnittstelle sprechen, oder?
Ja, aber das soll noch nichts heissen.
Eine Idee hätte ich noch: Öffne die AVRootloader.dev Datei mit einem
Texteditor. Suche darin nach dem ATMege168, der muss da drinnen stehen.
Hm, auch blöder Voschlag, wir wissen ja das überhaupt nichts zurück
kommt.
Tja, versuch es mit kommerziellen USB-RS232 Wandler, vielleicht stimmt
bei deinem ja irgendwas mit den Pegeln nicht oder so.
Hast du schon einen anderen Bootloader mit der gleichen HW zum laufen
bekommen ?
Gruß Hagen
PS: USB-RS232 == USB-UART
Um sicher zu gehen:
1.) konfiguriere alle Use???? Defines in AVRootloader.asm
2.) setze BootCodeSize = 0
3.) compiliere mit AVRStudio
4.) nun aus Messagewindow CSEG [used] nach BootCodeSize kopieren
5.) compiliere mit AVRStudio
6.) achte im Messagewindow auf die BOOTSZ Einstellungen
7.) flashen
8.) Fuses
Gruß Hagen
Hagen Re schrieb:> Hast du einen kommerziellen USB-RS232-Wandler oder vielleicht sogar> einen echten COM Port an deinem Rechner ? Wenn ja probier es mal damit> aus, einfach um Fehler in der exotischen HW ausschließen zu können. Sehr> oft, ja sogar am häufigsten lag es nämlich bisher immer an der SW oder> HW der USB-RS232 Wandler.
bevor ich den alten laptop rauskrame:
ist dein Programm auf win95 lauffähig?
Hagen Re schrieb:> Hast du schon einen anderen Bootloader mit der gleichen HW zum laufen> bekommen ?
jep, mit PeDas hatte ich es schon mal
>> Gruß Hagen>> PS: USB-RS232 == USB-UART
RS232 heißtfür mich "Hochspannung" und invertierte Pegel.
Was ich gerade noch gecheckt habe:
Die Adresse im Hex-file stimmt auf jeden fall mit der zu der Fuse-Config
überein. und nach dem Auslesen des Controllers passt auch alles.
Hagen Re schrieb:> jup
"jup, ich sehe das falsch", oder "jup, die sollte angehen"
an geht nämlich nichts.
ich werd mal vorsichtshalber nen anderen Controller dranhängen, kann
aber erst später weitermachen.
Nochmal danke, für die Hilfe.
Vlad Tepesch schrieb:> "jup, ich sehe das falsch", oder "jup, die sollte angehen"
ok, das hast du schon beantwortet.
> an geht nämlich nichts.
habs nochmal überprüft.
es geht doch an, ich hatte nur vergessen RS485 zu deaktivieren und es
auf den selben Pin gelegt.
Ich habs jetzt nochmal mit einem anderen Kabel (USB->Nokia-FBUS (ist
auch ein usb-Uart)) probiert gleicher Effekt (gar keiner).
Die Kabel miteinander reden zu lassen, klappt aber super, so dass ich da
eine Fehlfunktion für unwahrscheinlich halte.
Habe testweise auch mal probiert in der Gerätesteuerung die Puffer
abzuschalten, hat aber auch nix gebracht.
Hab einen anderen mega168 und sogar einen mega8 probiert.
Irgendwie klappt gar nix.
kannst du mal ein Codesnippet posten, dass man direkt am Anfang einfügen
kann, welches ein "Hallo" per UART verschickt? (am besten per fester
Baudrate)
wenn ich das in ASM hinschreibe, bin ich mir immer noch nicht sicher,
ob, wenn nix ankommt, mein Code oder die Verbindung schuld ist.
Gruß,
Vlad
die Konfiguration, die ich oben schon gepostet habe.
Aber was das bringen soll, frage ich mich.
Ob du oder ich das kompiliere, sollte ja egal sein.
Dass es an meiner Hardware liegt, kann man ja mittlerweile auch fast
ausschließen.
2 verschiedene Kabel, die miteinander und mit Pedas Bootloader
funktionieren.
In anderen Projekten wurde das eine ja auch schon oft benutzt.
Am interessantesten im Sinne des Debugging wäre jetzt ein
Test-Bootloader, der mit deinem aktuellen Code ein paar Zeichen am
Anfang rausschickt.
ich habe das hier mal probiert
1
[...]
2
.endif ; .if UseAutobaud
3
4
sbi DDRC, 1 ; von mir
5
sbi PORTC, 1 ; von mir
6
ldi paral,'H' ; von mir
7
rcall putc; ; von mir
8
9
; identifier (BootSign) scanning with timeout and checksum
10
[...]
Ob ich was übersehen habe und ob es so funktionieren kann, weiß ich
nicht.
Die LED geht nach dem Boot an, Zeichen kommen keine.
Seh ich das richtig, das das ganze rein auf SW-Uart basiert?
hallo hagen
Ich möchte über Ihre Bootloader-Programm fragen.
Nach dem Lesen einiger Kommentare Ich weiß, dass Sie XTEA verwenden, um
die kompilierte Programm zu verschlüsseln.
Aber ich bin wenig über die Verschlüsselung verwechselt. Wo sind die
Verschlüsselung verwendet? Ist es in injiziert Programm AVR's oder in
der GUI-Software?
Wenn ich mein Programm verwendet werden, um die Firmware mit Hilfe
gegeben makefile kompilieren, ist es nur kompiliert oder
zusammengestellt und verschlüsselt?
Ich bin auf Ihre Antwort warten.
Was
Favian
@Favian: I try a answer in english, think thats better ;)
With the GUI you can encrypt your HEX files into so called ACY files.
You deliver this encryted ACY file to your customers. Your customers use
the same GUI to download the ACY content encrypted to your preprogrammed
AVR devices with installed AVRootloader. This bootloader receives the
encrypted content and decrypt it.
Thus, only your GUI and your AVRootloader.asm Bootloader knows the
password and any communication, thus upgrades are encrypted. Otherwise
it would be useless.
Please remember follow important points to make it secure:
- newer deliver any keys to your customer
- thus ensure that in AVRootloader.ini at your customers in section
[System] the topic Password= is empty
- compile AVRootloader.asm with follow defines
* UseCrypt = 1
* UseCryptFLASH = 1
* UseCryptE2 = 1, iff you want secure EEPROM updates
* UseSRAM = 0
- choose always for each of your projects a new uniqe password, use the
GUI and click the "Make Password" button.
- make a full backup of the AVRootloaderproject to each of your projects
- never deliver unencrypted HEX files to your customers
- always setup the right security fuses of your AVR device !!
- to increase upgrade security activate the versioning -> UseVersioning
= 1. With this options you can finecontrol up/downgrading process and
the versionnumber help you for better supports.
Best regards, Hagen
PS: as a little job i provide the possibility to you to costumize the
GUI to your needs. As example changing the logo to your own ;)
@Vlad:
>Seh ich das richtig, das das ganze rein auf SW-Uart basiert?
Ja, sehr ähnlich zu PeDa's Bootloader. Infact stammen die relevanten
Teile von Peter und ich habe sie an die Bedürfnisse vom AVRootloader
angepasst.
Wenn du also PeDa's Bootloader zum laufen bekommen hast dann sollte der
AVRootloader ebenfalls auf Anhieb laufen. Die
Konfigurierbarkeit/Compilation ist für Anfänger beim AVRootoader in
meinen Augen sogar noch einfacher.
1
[...]
2
.endif ; .if UseAutobaud
3
4
sbi DDRC, 1 ; von mir
5
sbi PORTC, 1 ; von mir
6
ldi paral,'H' ; von mir
7
rcall putc; ; von mir
8
9
; identifier (BootSign) scanning with timeout and checksum
10
[...]
Das bringt garnichts. Die wichtigen Parameter für "putc" und damit
SW-UART sind noch garnicht initialisiert.
1
; fixed baudrate
2
ldi yl, byte1(Baudrate)
3
ldi yh, byte2(Baudrate)
4
movw baudl, yl
5
.endif ; .if UseAutobaud
6
7
; identifier (BootSign) scanning with timeout and checksum
8
9
;id1: sbiw xl,
10
;... brne id1
11
;... alles auskommentieren
12
13
; send info about chip/bootloader (BootMsg + BootInfo)
14
info: ldi parah, (BootInfo - BootSign) * 2 +4
15
in1: xlpm paral, z+
16
rcall putc
17
dec parah
18
brne in1
probier es mit obiger Änderung. Nach der Baudraten Detektion ->
UseAutoBaud=1 setzen, wird sofort das BOOTSIGN, BOOTMSG und BOOTINFO
gesendet.
Du solltest das dann als HEX-Antwort im Protokollfenster des GUIs sehen.
Gruß Hagen
Hagen Re schrieb:> PS: as a little job i provide the possibility to you to costumize the> GUI to your needs. As example changing the logo to your own ;)
i think it would be great if the gui could contain a possibility to
create a little Stand-Alone-Firmware-Updater.
So the customer only need to select the com-port and hit flash and he
does not have to configure that many options.
This should not be difficult.
You only need a template program that loads the logo, the firmware,
eeprom (if any) and some parameters (signature, baudrate, version) from
the exe-ressources.
If i get the loader running and you will publish the delphi sources of
the gui, maybe i can do that.
;) @Vlad: I provide this as little job to earn a realy small fee, such
as small that as example the normal money transfer from france to
germany make it useless ;) Thus no public delphi sources of the GUI and
no feature to make these changes self.
Are the bootloader now running ?
Best regards, Hagen
@Vlad:
>You only need a template program that loads the logo, the firmware,>eeprom (if any) and some parameters (signature, baudrate, version) from>the exe-ressources
I do'nt prefer this solution. The GUI supports already commandline
options, including automatic updates. And the compiled ACY files are
infact like encrypted scripts supporting in one file the data for FLASH
and EEPROM programming and FLASH verifications.
Packing all into a single EXE provide no effects
- EXE size is already and always big, separate distributations lead to
only transfer the small ACY files
- todays anti-spam, anti-virus technologie dont like self modified EXEs,
or packed EXE stubs and so on
A distibutation contains
- AVRootloader.exe
- AVRootloader.ini
- AVRootloader.dev
- ????.acy, your ACY file contaning FLASH/EEPROM data
- ????.bat or ????.lnk to start AVRootloader.exe per commandline in
automatic mode
Iff we register the ACY extension to AVRootloader.exe then we store in
registry all paramaters and thus we do need only the ACY file it self,
no BAT/LNK files needed.
Best regards, Hagen
Hagen Re schrieb:> Wenn du also PeDa's Bootloader zum laufen bekommen hast
definitiv, habs grad auch noch mal ausprobiert -> geht.
Hagen Re schrieb:> Konfigurierbarkeit/Compilation ist für Anfänger beim AVRootoader in> meinen Augen sogar noch einfacher.
jep, seh ich genauso
Hagen Re schrieb:> probier es mit obiger Änderung. Nach der Baudraten Detektion ->
die Änderung setzt doch an der selben Stelle an, wie meine.
Aber auch hier passiert nix - zum Verzweifeln.
@Vlad:
>die Änderung setzt doch an der selben Stelle an, wie meine.
Jo das sehe ich jetzt auch. Baue dort noch den Code für deine LED ein.
> Aber auch hier passiert nix - zum Verzweifeln.
dann kommt der Bootloader nicht über die Baudraten Detektion hinaus.
Ich weiß so langsam auch nicht weiter, was bei dir da schief läuft.
Überprüfe nochmal ganz genau deine Fuses. Lösche den AVR komplett und
programiere AVRootloader.hex und Fuses nochmal.
Und kauf dir mal ein Oszi ;)
Ach und überprüfe ob du mehrere Installationen von AVRootloader hast und
lösche alle bis auf die aktuelleste. Lösche auch das HEX File vor dem
Compilieren. Meine Erfahrung sagt mir das manche Programmierer echte
Schlampen sind, das unterstelle ich dir nicht, aber manchesmal arbeitet
man auf den falschen Daten und wundert sich (ist mir auch schon
passiert).
Gruß Hagen
Thanks for your reply... I'm glad that you understand English...
About the GUI, would you like to share the source code before compiled
(C/C++ program)? So that I can modify some parts, like the logo, the
appearance, and the other parts.
I try to understand this part
; follow bytes should be keept secret and choosen randomly, 128 Bit
Password, first 32 bit used as Signature
BootKey: .db
$A7,$39,$C9,$AD,$A2,$D1,$1E,$F6,$45,$7F,$75,$7A,$6D,$4C,$21,$41
As I know, the GUI software generate password from that Boot key. am I
right? If I'm wrong, what does that boot key mean?
thanks.
regards.
Favian
>As I know, the GUI software generate password from that Boot key. am I>right? If I'm wrong, what does that boot key mean?
Thats the password, eg. key for the XTEA decryption. The GUI can make
for you a random password. The GUI can patch your AVRootloader.asm
source file with this new random key for you. The GUI copy the random
key into your clipboard. The GUI can store the random key into your
AVRootloader.ini iff you want this.
If you click "compile" in the GUI the program use the given FLASH +
EEPROM File + checked Options + Versionsnumber + even the password =
bootkey to compile a encryted ACY file with all this content. Thus the
data in this ACY file are encryted with the same password as stored into
BOOTKEY.
Thus: the AVRootloader.hex must be secure, your AVR devices must be
secured by the fuse settings, and in the customers AVRootloader.ini you
must delete thePassword topic. In your production AVRootloader.ini you
can store the actual used Password, or the GUI ask you everytime for the
password.
Try it.
>About the GUI, would you like to share the source code before compiled>(C/C++ program)? So that I can modify some parts, like the logo, the>appearance, and the other parts.
No. As i told some postings prior, i make with this a small fee. All
other remains free, even for commercial purpose. The only thing where i
can get a small return are the customization of the GUI or protocoll for
commercials.
Once more i provided a AVRootloader.dll wich contains COM/DCOM
compatible interfaces to all functionality of the bootloader. It's even
free. A expirienced developer can access with his own GUI to the
bootloader features.
Thus, i think thats all fair and enough "free of charge work". Over the
time i tend even more to not publish my work again in this manner.
Best regards, Hagen
Hm, ok step by step:
1.) start the GUI and press "Make Password" button, let patch the
AVRootloader.asm source, let save this key into AVRootoader.ini
2.) configure AVRootloader.asm to your need and compile it as descripbed
3.) program your device with the AVRootloader.hex
4.) setup fuses of your device to protect it from reading back, protect
even application access to the bootloader section
5.) in the GUI choose your HEX File for the FLASH and EEPROM, setup all
option checkboxes to your need
6.) press "Compile" Button and create a ACY file
7.) your customer get from you
- AVRootloader.exe, AVRootloader.dev, AVRootloader.ini with PAssword
topic empty
- your device, with AVRootloader bootloader and protected by fuses
- the compiled and encrypted ACY file
8.) the customer select this ACY file in the FLASH file combobox and
press the "Program" button. All options, contents and so on thats was
configured on creation of this ACY file are now executed, regardless of
the options checked in the GUI.
Thus, Your developement computer and your devices shares the same
password=key=BOOTKEY, nobody others should knew it. You alone provide
compiled and encryted ACY files. Thus all upgrades are secure.
Regards, Hagen
Dear Hagen
I have tried to follow your instruction to create *.acy file from
AVRootloader.exe.
But until now I always fail. why it can happen? Can you explain to me?
this is my step to make *.acy
10) run AVRootloader.exe and configure parameters (COM port, baud rate,
daily organizer)
11) pick in the input field "FLASH" a HEX file to be compiled
12) pickin the box "EEPROM" an EEP file to be stored in the EEPROM
13) press switch "compile"
14) pick from the file dialog, the name and location of the file ACY
In my case, I don't use eeprom, so I let eeprom empty.
Is it OK with my way?
Thanks
do you have a AVR device, with right installed bootloader, already
connected on the COM port ?
The GUI won't work offline, because it get from bootloader important
params like signature, version, crypto support and so on..
If you let the comboboxes for FLASH and/or EEPROM empty they would be
ignored. You can choose
- only a *.HEX into FLASH File
- only a *.EEP into EEPROM File
- *.HEX into FLASH File and *.EEP into EEPROM File
- only a *.ACY into FLASH File, EEPROM File are ignored then
If you now press "Compile" then both files are compiled and, maybe if
the AVR device support encryption, encrypted into ACY file. Prior the
GUI must be connected to AVR.
If you press "Program" button then the GUI try to connect, if not
already connected, to the AVR, and program the FLASH and/or EEPROM
dependend of selected files in combobox. Dependend of features installed
on AVR bootloader the GUI encrypt live the FLASH/EEPROM communication
suppose the AVR can be only updated encrypted. If you have configured
the Bootloader to support encryted and unencryted the GUI choose the
unencrypted communication. This configuration is
UseCrypt=1 -> Bootloader supports encrytion.
UseCryptFLASH=0
UseCryptEEPROM=0 -> Bootloader accepts encrypted and not encryted
communication.
UseCryptFLASH=1
UseCryptEEPROM=1 -> Means FLASH/EEPROM datas must be encryted.
Unencryted are'nt allowed.
If the GUI have to encrypt the communication it looks into
AVRootloader.ini on topic Password=. If is empty the GUI ask you for the
password.
Think not to deeply about all possible combinations, do and try it, it's
bullet proof and idiot secured ;)
Watch the caption and the "connect" Button of the GUI when you do any
actions.
Regards, Hagen
@hagen
Ich geh kaputt, ich hab jetzt nochmal ganz von vorn angefangen und jetzt
funktionierts.
Ein diff zu dem Projekt, was ich hochgeladen habe zeigt keine
Unterschiede, außer dem UARTInvert, was ich ja aber vorher auch schon
(und zwischendurch immer wieder) probiert hatte.
Mir ist aber noch unklar, warum die invertiert werden muss.
Wenn ich sonst die UART verwende, häng ich die auch direkt an meinen
Adapter.
Wenn ich den UseWDR konfiguriere, disconnected sich das device aber
immer wieder.
1
13.07.10-16:30:26-843 > Connecting on port COM4...
2
13.07.10-16:30:26-843 > Timeout.Connect = 500 ms
3
13.07.10-16:30:26-843 > Timeout.Base = 500 ms
4
13.07.10-16:30:26-843 > Timeout.Erase = 100 ms
5
13.07.10-16:30:26-843 > Timeout.Flash = 150 ms
6
13.07.10-16:30:26-843 > Timeout.Eeprom = 100 ms
7
13.07.10-16:30:26-843 > Timeout.Buffer = 10 ms
8
13.07.10-16:30:26-843 > Timeout.AppCmd = 0 ms
9
13.07.10-16:30:26-843 > Timeout.KeepAlive = 2500 ms
Ist da vielleicht ein Bug? der Bootloader müsste den WDT doch am Anfang
deaktivieren und am Ende wieder aktivieren, oder hab ich den Sinn der
Option falsch verstanden.
Gibt es eine Option, mit der man den WDT einfach nur deaktivieren kann.
Ich will den WDT benutzen um ein Reset auszulösen.
Am allerliebsten wäre mir jedoch, wenn ich per UART ein Kommando
schicke, dass der µC den Bootloader startet.
Da gibt es allerdings 2 Probleme: wie komme ich zum Bootloader ohne fixe
Addressen in meinem C-Code zu haben? Der Sprung zum Bootloader ginge ja
nur über inline-Asm, oder? Ich vermute genau hierfür ist das
UseSpecialBootVect, aber wie benutze ich das?
das 2. ist, dass das Flashtool, dieses Kommando senden müsste, oder man
müsste die Wartezeit am Anfang sehr lang machen.
>Mir ist aber noch unklar, warum die invertiert werden muss.>Wenn ich sonst die UART verwende, häng ich die auch direkt an meinen>Adapter.
Das ist eine Frage des Standpunktes ;)
Die Soft-UART des Bootloaders kann direkt mit ihren Pins an ein
RS232-Kabel angeschlossen werden. Das nennen wir mal 1-zu-1 Pegel.
Wird ein RS232-Pegel-Konverter benutzt so werden die Signalpegel defakto
invertiert. Aus RS232 wird TTL Pegel mit invertierter logischer
Bedeutung was nun ein 1- oder 0-Datenbit darstellt. Siehe
http://de.wikipedia.org/wiki/RS-232
Desweiteren kann der Bootoader im 2-Wire und 1-Write-RS232 Modus
arbeiten. Statt also mit getrennten RX/TX Leitungen, invertiert oder
nicht invertiert, kann man mit einer einizgen Leitung für RX/TX, also
1-Wire arbeiten. Ebenfalls invertierte und nicht invertierte Pegel. Im
1-Wire Modus kann man mit einem kleinen Adapter (Schaltplan ist im JPG)
auch direkt an die RS232 ohne Pegelwandler. Aber auch mit Pegelwandler
wie MAX232, USB-UART usw. kann man noch 1-Wire benutzen, dann mit
UseUARTInvert=1.
Im 1-Wire-Modus kann man mehrere AVRs mit meinem Bootloader auf einem
Board platzieren und alle sind am gleichen 1-Wire-Bus angeschlossen.
Wenn die einzelnen Bootloader dieser AVRs alle unterchiedliche BOOTSIGNs
koinfiguriert haben dann kann man damit alle AVRs updaten über eine
einizige Leitung und einem einzigen Windows-Program.
Gruß Hagen
>Wenn ich den UseWDR konfiguriere, disconnected sich das device aber>immer wieder.>13.07.10-16:30:27-515 > Timer created>13.07.10-16:30:27-515 > Device connected>13.07.10-16:30:30-015 > send keepalive>13.07.10-16:30:30-515 > Timer released>13.07.10-16:30:30-515 > keepalive failed, terminate connection
Das Protokoll sagt es schon:
1.) keepalive failes, termnate connection
2.) Timeouts.KeepAlive=2500 ms
Der WDT im AVR wird im Bootloader immer auf 2 Sekunden=2000ms
programmiert. Ergo 2500ms KeepAlive Interval ist bei weitem zu lange,
ich habe das so nie konfiguriert. Setze es auf 500ms bis 1000ms wieder
zurück. Selbst 1500ms wären zu lang, bedenke das Nyquist Theorem.
Nutzt du UseWDT=1 so hat das mehrere Vorteile:
1.) der WDT wird auf 2s Timeout programmiert
2.) wenn eine Bootloader Software connected ist so muß diese alle max.
2s ein Kommanod senden oder irgendwas senden.
3.) erfolgt dies nicht so geht der Bootloader von einer gebrochenen
Kommunikation, startet über WDT-Reset sich quasi selber erneut, kommt in
seine Baudrate Detektion und/oder BootSign Detektion, Timeouted dort und
ruft dann final die istallierte Anwendung auf.
4.) sendet nun das GUI periodisch Daten oder eben ein KeepAlive und der
Bootloader antwortet nicht mehr so trennt das GUI die Verbindung autom.
Also auch hier wartet es dann nicht unendlich.
5.) du kannst in deiner Anwendung selber über einen absichtlichen
WDT-Timeout den Bootloader starten. Ich empfehle das exakt so weil es
technologisch den saubersten und stabilsten Programablauf ermöglicht.
Der AVR wird auch aus unvorhersehbaren Situationen immer sauber
recovern.
Naja, du lässt also den WDT mit zb. 20ms und einer Endlosschleife bei
gesperrten IRQs "timeouten". Daraufhin wird der AVR zurückgesetzt, also
auch alle Register und Ports in jedem Falle neu iniatilisiert.
Der Nachteil oder auch ein Vorteil:
Nutzt du den WDT in deiner Anwendung nicht dann musst du den WDT in
deiner Anwendnung sofort beim Startup deaktivieren. Nun kann das aber
auch ein Vorteil sein, denn wenn deine Anwendung vorher schon hängt,
weil FLASH kaputt oder irgendwas falsch programmiert wurde, dann würde
deine App den WDT nicht deaktieren. Da mein Bootloader vor dem Aufruf
deiner Anwendung den WDT zurück gesetzt hat hast du somit rund 2
Sekunden Zeit den WDT zu deaktivieren oder ihn zurück zu setzen. Erfolgt
das wie geagt auf Grund enes Fehler nicht so entsteht ein RESET und
schwups sind wir wieder im Bootloader. Somit Kreislauf geschlossen, auf
unvorhergesehene Fehler reagiert das System indem es den Bootloader
startet, ergo AVR ist erreichbar per GUI.
Ich empfehle dir also dringends den WDT zu benutzen, über ihn den
Bootloader zu starten. Damit erledigt sich auch dein Problem den
Bootloader per JUMP anspringen zu wollen. Wobei aucn das sehr simpel
ist:
1.) UseSecialBootVec=1 setzen
2.)
1
voidbootloader_start_jump(void){
2
3
asmvolatile("jmp -2");
4
}
5
6
voidbootloader_start_wdt(void){
7
8
cli();
9
wdt_reset();
10
_WD_CONTROL_REG=(1<<WDE)|(1<<_WD_CHANGE_BIT);
11
_WD_CONTROL_REG=(1<<WDE);
12
for(;;);
13
}
Durch die Arithmetic führt dieser Sprung bei allen AVR deren
addressierbarer FLASH eine Größe einer Potenz von 2 hat immer dazu das
an die letzte FLASH Addresse, bzw. OpCode gesprungen wird.
Aber beachte dabei auch folgendes:
Alle deine gemachten Einstellungen an den Ports, ISRs, IRQs musst du
manuell sauber zurücksetzen damit der Bootloader eine saubere Umgebung
vorfindet. Der Bootloader, erbt also alle deine Einstellungen. Das kann
von Nutzen sein wenn du den Bootloader als "Mini-Debugger" benutzen
möchtest, dann möchtest du ja das zb. im SRAM/PORT Fenster des GUIs das
steht was du in deiner Applikation eingestellt hast.
>Am allerliebsten wäre mir jedoch, wenn ich per UART ein Kommando>schicke, dass der µC den Bootloader startet.
Das geht auch schon ;)
1.) in AVRootloader.ini setze
- AppCmd=StartBoot/0D
- AppCmdResponse=BootStart
- Timeouts.AppCmd=20
2.) in deiner Applikation nutzt du eine eigene UART Library mit gleichen
RX/TX Pins wie der Bootloader
3.) in dieser Library warte nun auf den Befehl "StartBoot" + 0x0D
4.) wenn eingetroffen sende "BootStart"
5.) aktiviere Bootloader mit bootloader_start_wdt(), ergo 20ms Timeout
Wenn du mit dem GUI einen Connect versuchst sendet es
1.) StartBoot + 0x0D
2.) wartet auf BootStart, also AppCmdResponse wenn da was drinnen steht
3.) wenn es AppCmdResponse empfangen hat oder es leer ist
4.) wartet es TimeOuts.AppCmd Millisekunden
5.) und beginnt dann einen Connect zum Bootloader
Das wäre die SW-Lösung. Die HW-Lösung
1.) verbinde RTS der RS232 mit RESET am AVR
2.) setze in ARootloader.ini
-RTSPulse=
-RTSInterval=
entsprechend dem was dort beschrieben ist
3.) das GUI pulst nun die RTS=RESET Leistung des AVRs vor jedem x'ten
Connect Versuch
Gruß Hagen
aso, die Timeouts hatte ich testweise mal vergrößert und wieder
vergessen zurückzusetzen.
jetzt gehts alles.
Hagen Re schrieb:>>Am allerliebsten wäre mir jedoch, wenn ich per UART ein Kommando>>schicke, dass der µC den Bootloader startet.>> Das geht auch schon ;)>> 1.) in AVRootloader.ini setze> - AppCmd=StartBoot/0D> - AppCmdResponse=BootStart> - Timeouts.AppCmd=20
Super! Stand das irgendwo? ich hatte extra die txts überflogen.
Nochmal vielen Dank für dieses super Stück Software und deine Zeit für
Erklärungen.
Hi Favian,
as might saw it in this thread, there is simple opensource alternative
gui for that bootloader.
Beitrag "Re: AVR-Bootloader mit Verschlüsselung" Once i programmed it
since of a lack of a GUI working under Linux. (This one is compilable
for windows aswell as linux)
Unfortunately its really simple and you cant create encrypted files on
your own like the original can do. Thus you have to use the original
loader to create your acy image which you can upload by that alternative
one then. Another restriction by now is that it only supports Atmega8
processors. Just because i was lazy and just needed support for that uC.
But it shouldn't be any problem to add other uC signatures with their
matching memory layout to extend its functionality. Feel free to do it!
@Hagen:
Es wäre echt super, wenn deine GUI ein ACY File auch in Abwesenheit
eines uC erstellen könnte. Dass die ganzen Prozessordaten stimmen für
mein ACY Image stimmen, dafür nehme ich gerne die verantwortung. :-)
Regards, Grüße,
Arne
@Arne: ja du bist nicht der Einzige der diesen Wunsch hat. Dummerweise
war das nicht konzeptionell geplant und somit wird es mehr Arbeit werden
als nur nebenbei mal das Logo auszutauschen oder par Buttons zu
verschieben.
Es steht auf der Todo Liste als erster Punkt.
Gruß Hagen
Hagen Re schrieb:> @Arne: ja du bist nicht der Einzige der diesen Wunsch hat. Dummerweise> war das nicht konzeptionell geplant und somit wird es mehr Arbeit werden> als nur nebenbei mal das Logo auszutauschen oder par Buttons zu> verschieben.
schon klar. Kein Stress! Wollte nur mal den Wunsch etwas auffrischen..
> Es steht auf der Todo Liste als erster Punkt.
Yeah!
> Gruß Hagen
Gruß, Arne
@Hagen:
Du hast in dem Bootloader.zip leider keine Texte, die auf die Lizenz
schließen lassen. Auch die Sourcen enthalten nix dahingehendes.
Ich würde diesen Bootloader gerne in der Word Clock* verwenden.
Der Einfachheit halber wäre es schön, wenn ich den Bootlader mit den
Sourcen und dem Flash-Tool dort dazupacken könnte, da dies das
unkomplizierteste wäre und die Leute, es so nicht separat herunterladen,
in ein vorgegebenes Verzeichnis entpacken und konfigurieren müssen.
Bitte schreib, wie du dazu stehst.
Gruß,
Vlad
*
ein GPL-Projekt
-> http://www.mikrocontroller.net/articles/Word_Clock
-> http://www.mikrocontroller.net/topic/156661)
Jo geht so. Der Bootloader ist so wie du ihn hier findest Freeware, wie
alles was ich veröffentliche. Einziger Wunsch ist das Copyright, bzw.
ein Hint in deiner ReadMe/AboutBox auf meinen Bootloader, aber selbst
das kann ich nich kontrollieren.
Alles was in Richtung kommerzielle Nutzung geht kann, muß aber nicht,
mit mir per EMail nochmal abgesprochen werden und ich bin gerne bereit
Modifikationen zb. im GUI der Windows Software vorzunehmen.
Gruß Hagen
Hallo Hagen, Hallo an andere 1-wire Nutzer!
Ich habe ein kleines Problem in der 1-wire Nutzung sobald ich mehrere
Mega8 am gleichen Draht habe. Habe hier Brushlessregler, jeder hat noch
einen 220R vor dem einzigen Nutzbaren Pin (PD1/RXD).
Dazu die letzt Schaltung aus dem Wiki an einem FTDI Breakout von
Sparkfun, 2k7 zwischen FTDI TX & RX, FTDI RX and AVR-RX/Bootloaderpin
und noch ein 100k Pullup. TTL Pegel, UartInvert =1 und die Sache
funktioniert soweit auch.
Auch wenn nur 1 Regler angeschlossen ist komme ich nicht immer sofort in
den Bootloader, muss immer wieder 3-4x den AVR resetten um in den
Connected-Status zu kommen, ist er aber mal connected bleibt er das aber
auch tagelang, flashen funktioniert,... ist das so normal - das mehrfach
reset's notwendig sind...?
Und jetzt geht es daran, mehrere der Regler über den Bootloader
anzusprechen. GND und die Bootloader-Pins verbinden und an die Schaltung
die am FDTI hängt dran. Hier hätte ich maximal bedenken das bei n
Reglern die nx vorgeschaltenen 220R ein Problem sind.
Jeder hat seine eigene ID (BLCLOADER1..8) und kann einzeln auch
angesprochen werden.
Sobald ich einen 2ten Regler anschließe, komm ich nicht mehr zum
connect, egal wie oft ich die AVRs resette, die PC-Anwendung geht nie in
den Connected-Status. Im Testaufbau habe ich die Verbindung über ein
Steckbrett, trenne ich hier den 2. Regler, sodaß nur ein AVR verbunden
ist, komme ich sofort wieder in den connected-status. Bin ich in diesem
und verbinde dann den 2ten regler, so bleibt alles connected und ich
kann, trotz des 2ten Reglers flashen. Connected-Status kann ich mit
Disconnect beenden, oder den Regler 1 abstecken, dann wird dies auch
erkannt.
D.h. ich gehe davon aus, das sich die AVR betreff kommunikation nicht in
die quere kommen (die Regler-Soft aktiviert den UART-RX), sonst würde ja
die Kommuniktation beim Flashen, der Keepalive,... nicht funktionieren.
Nur warum kann ich nicht connecten?
Hat irgendjemand ein ähnliches Problem? Hab hier zwar ein paar Stunden
gelesen, aber in diesem langen Thread nichts dazu gefunden, bzw.
hoffentlich nichts übersehen?
Danke für die Unterstützung & lG, Martin.
Hi Martin,
Zur Verbesserung des Connects:
* in AVRootloader.asm
- UseAutobaud = 1
- UseResetDelay = 1
- BootDelay vergrößern zb. auf XTAL/2, XTAL/1 -> 500ms, 1sec
* in AVRootloader.inc
- BaudTolerance = 3 oder langsam höher setzen, je größer der Wert desto
größer der Fangbereich bei abweichenden Baudraten. Ich empfehle max. 5
bis 6
* in AVRootloader.ini
- Baudrate=115200
- [timeouts] Base = 25
Je höher die Baudrate und desto kleiner der Base-Wert desto mehr
Connect-Versuche im gleichen Zeitraum können stattfinden, desto höher
die Wahrscheinlichkeit eines Connects im Zeitbereich. Aber auch desto
kritischer das Timing bei der Kommunikation.
Je geringer die Baudrate und je größer Base desto stabiler wird die
Kommunikation aber der Connecttrial wird pro Zeitspanne weniger häufig
stattfinden können.
Zum 1-Wire:
Ich habe den Multi-Bus-1-Wire nur mit physikalischen RS232 Pegeln
getestet. Du benutzt einen TTL Pegelwandler und dadurch invertieren sich
alle Signale und damit auch das Verhalten der DDR-Ansteuerung. Die AVRs
kennen nur interne PullUps und keine PullDowns. Versuche also auch mal
extern einen PullUp oder PullDown Widerstand dran zu pappen.
Die Bootloader SW übernimmt erst dann die Kontrolle über den 1-Wire-Bus
wenn sie das korrekte BootSign und demnach die korrekte Baudrate
ermittelt hat.
Gruß Hagen
Hallo Hagen,
ich benutzte dein prg sehr gerne. Auch von mir ein super Danke für
dieses tolle Tool. Ich glaube einen kleinen Fehler entdeckt zu haben.
Wenn ich AVRootloader per Batch aufrufe und ein '-' (Minuszeichen) im
Pfad oder Dateinamen sich befindet, wird danach alles abgeschnitten und
es geht natürlich nicht mehr weiter! Tausche ich alle 'Minus' z.B. gegen
ein Unterstrich aus, gehts.
MfG. Tom
@Thomas:
ja da wirds immer ein Problem geben. Ich bekomme den kompletten
Parameter als Kommandozeile. In dieser befindet sich der Pfad + der Name
der EXE + die Parameter. Im Pfad können fast alle Zeichen vorkommen, so
auch - und Leerzeichen. Ich muß aber irgendein Token/Zeichen benutzen um
den Begin eines Parameters zu signalisieren.
Leerzeichen im Pfad würde den Pfad als solches abschneiden. Minus im
Pfad würde die SW als Parameter interpretieren. Ich könnte nun beim
Parsen das Minus nur dann als Parameterstart akzetieren wenn vor dem
Minus und Leerzeichen steht. Das würde die Fehlerwahrscheinlichkeit
reduzieren aber das Problem nicht real sauber lösen.
Andere Option wäre es die Pfade in Anführungsstriche zu setzen.
Dummerweise geht das aber nicht autom. wenn Windows eine Anwendung
startet. Geht also nur bei Batches/Verknüpfungen etc.pp.
Egal wie ich es drehe:
- Windows hat mit seinen langen Dateinamen und dem Zulassen von bisher
unter DOS illegalen Zeichen in den Pfaden uns Progrmmiern die Arbeit
erschwert
- ich müsste das komplette Parameter-Format abändern
Ergo: Verzichte auf Minus in deinen Pfadangaben.
Gruß Hagen
PS: ich könnte das Minus durch Slash ersetzen., weiß aber jetzt nicht
aus dem Stand heraus ob das wirklich eine gute Idee ist oder ob ich mir
damit neuen Ärger einfange.
Hagen Re schrieb:> @Thomas:>> ja da wirds immer ein Problem geben. Ich bekomme den kompletten> Parameter als Kommandozeile. In dieser befindet sich der Pfad + der Name> der EXE + die Parameter. Im Pfad können fast alle Zeichen vorkommen, so> auch - und Leerzeichen. Ich muß aber irgendein Token/Zeichen benutzen um> den Begin eines Parameters zu signalisieren.
Nimm doch testweise den nächsten Token, füge ihn an den alten an und
prüfe, ob der Pfad existiert. Wenn nicht -> als Paramter interpretieren,
wenn nicht, ists der Pfad.
Oder alternativ, falls du Delphi verwendest, Parameterstring nach
ExtractFileName(application.exename) durchsuchen und bis dahin alles
abschneiden. Dann besteht der String nur noch aus Paramtern. Wäre eine
Zeile.
> Egal wie ich es drehe:> - Windows hat mit seinen langen Dateinamen und dem Zulassen von bisher> unter DOS illegalen Zeichen in den Pfaden uns Progrmmiern die Arbeit> erschwert
Hab auch schon oft Erfahrungen mit gemacht...
Viele Grüße,
Arne
@Arne: das hatte ich mir auch schon überlegt, fixt aber das Problem auch
nicht vollständig. Man kann als Parameter einen Arbeitspfad und Pfade zu
ACY/EEP/HEX Dateien angeben. Auch dort tritt das Problem dann auf und
dort kann ich das mit dem EXEPath Trick nicht erschlagen.
Ich werde es wohl so bauen das man in der AVRRootloader.ini das
Parameter-Token angeben kann. Standard wird Slash, ersetzt man es durch
Minus gibts keine Probleme mehr mit veralteten Kommandozeilen. Die
Benutzer der Kommandozeilenaufrufe müssen dann halt ihre Kommandozeilen
bei Bedarf anpassen.
Übrigens arbeite ich mit Delphi. Ich bin aber gezwungen einen eigenen
Parser für die CommandLine zu schreiben da man der Delphi RTL nicht eine
andere CommandLine unterjubeln kann. Das bräuchte ich aber da ich nur
Single Instances der EXE zulasse und wenn die EXE mehrfach gestartet
wird so kommuniziert die neu gestartet EXE ihre Kommandozeile zur schon
gestarten Instanz und terminiert sich dann selber. Die schon laufende
Instanz lädt dann ihre Parameter neu auf Grund der Parameter die man der
zweiten Instanz übergeben hat, und setzt sich in den Vordergrund. Ergo:
ich muß die Commandline per Hand auswerten und kann nicht die RTL
Funktionen von Delphi benutzen.
Gruß Hagen
@Hagen:
Danke für die rasche Rückmeldung, hatte nur selbst nicht eher Zeit ;)
UseAutoBaud hatte ich schon auf 1,
UseResetDelay geht nicht - im regulären (Flug-)Betrieb könnte der Regler
abstürzen, bekommt ständig Daten zugesendet, da muss der Reboot so rasch
wie möglich durchlaufen, sonst stürzt das Modell ab. UseResetDelay=1
würde bedeuten das er für immer im Bootloader bleibt.
BootDelay hatte ich schon auf XTAL/2 bzw. 500ms.
[TimeOuts] Base=25 ist in Zusammenhang mit 57600 Baud in 95% der Fälle
sofort beim ersten Reboot vom AVR erfolgreich - also mehr als
ausreichend!
Beim 1-wire Problem hatte ich schon mal mit/ohne Pullup/down probiert...
Hab jetzt unterschiedliche Werte ausprobiert, bei 2 Reglern funktioniert
es mit einem 10k Pulldown mit sehr guter Connect-Rate!
In diesem Sinne DANKE für diesen genialen Bootloader!!!
lG, Martin.
>bei 2 Reglern funktioniert>es mit einem 10k Pulldown mit sehr guter Connect-Rate!
Je nachdem was du als Widerstand zwischen RX/Tx geschaltet hast würde
ich den Pulldown sogar auf 4k7 reduzieren.
>UseResetDelay geht nicht - im regulären (Flug-)Betrieb könnte der Regler>abstürzen, bekommt ständig Daten zugesendet, da muss der Reboot so rasch>wie möglich durchlaufen, sonst stürzt das Modell ab. UseResetDelay=1>würde bedeuten das er für immer im Bootloader bleibt.
Hm. Dann hätte ich aber den Bootloader über einen externen Pin
angesprochen der nicht auch deinen Kommunikationskanal macht.
Du kannst aber auch mit UseBootMode=1 den Bootloader so konfigurieren
das er nur startet wenn:
a) noch keine Applikation geflasht wurde
b) wenn ein Powerup die Ursache des Resets war
Damit schließt du "künstliche" Resets wie WatchDog und eben BrownOut
Reset aus. Besonders letzere beide sollten für dich interessant sein da
ich vermute das über diese beiden Reset Sources dein Regler recovert.
Oder UseBootMode=2 startet den Bootloader dann nur bei externem
absichtlichen Reset, falls du den noch nutzt ;)
Eine andere, aber gefährlichere Einstellung wäre noch UseBootMode=5. Bei
dieser Einstellung startet der Bootloader nur bei nicht installierter
Applikation automatisch. Wurde einmalig eine Anwendung programiert so
muß diese per CALL/JMP den Bootloader selber aufrufen. Somit entscheidet
dann deine Anwerndung alleinig ob und wann der Bootloader gestartet
wird. Ein Fehler in deiner Anwdnung führt dann aber zum Ausperren.
Ich denke mal das UseBootMode=1 und aktiviertem WatchDog + Brownout die
cleverste Wahl für dich wäre. Dein Regler recovert falls er per WDT
timeouted, also bei Hängern in der Regler Software. Er recovert bei
absinkender Spannung, eg. Spannungeinbruch über den Brownout Reset.
Nur wenn der Regler komplettt neu mit Saft versorgt wird, er also
längere Zeit als der Brownout, keine Spannung hatte wird der Bootloader
in seine Warteschleife verzweigen. Ansonsten springt er sofort in deine
Anwendung, ohne Zeitverzögerung. Hast du UseWDT=1 gesetzt so wird vorher
sogar noch der WatchDog mit 2sec Timeout aktiviert.
Mit UseSaveMCUSR=1 sichert er sogar noch auf dem Stack (OnTop an
höchster SRAM Addresse) noch das oroginale MCUCSR/MCUSR Register bevor
das mit 0x00 überschrieben wird. Dh. in der Anwendung kannst du über den
Stack an die originalen RESET Sources gelangen um dann in deinem Startup
Code gezielt auf die spezifischen RESETs reagieren zu können.
Gruß Hagen
Hello,
I was looking for an alternative to AVR231 bootloader with encryption,
and Luiz told me about this one he is very happy with.
I see that ATmega328 is not in the list of supported devices.
What do I need to do in order to make it work for ATmega328?
ps: sorry I don't speak German. I started learning, but I am quite far
from writing it.
Best regards,
David
ATmega328P is supported. The Bootloader supports all self programmable
AVR devices, except XMega series. Even future devices. To include these
install newest AVRStudio on your computer. Delete AVRootloader.dev file
and start AVRootloader.exe on your machine. The software parse on
startup the AVRStudio XML part description and include files and create
a new AVRootloader.dev file based on these files.
Or you take manual the changes needed. First include follow line into
AVRootloader.asm source
1
.include "m328Pdef.inc" ; ATmega328P
then open AVRootloader.dev file an add follow line
950F=1E950F, ATmega328P , 32768, 1024, 2048, 256, 128, 4, 8, 16, 32
The parameters are as follow:
- 950F, short hexadecimal ID of the device
- 1E950F, full hexadecimal ID of the device, eg. same as first param
with leading 1E
- ATmega328P, the device name
- 32768, FLASH size in bytes
- 1024, EEPROM size in bytes
- 2048, SRAM size in bytes
- 256, start of SRAM or in other words the Register File and Port size
in Bytes
- 128, FLASH page size in bytes
- 4, FLASH page count of FIRST_BOOT eg. the size for Bootloader section
- 8, FLASH page count of SECOND_BOOT
- 16, FLASH page count of THIRD_BOOT
- 32, FLASH page count of FOURTH_BOOT
The version in the attachment already known the ATmega328P.
Best regards, Hagen
Many thanks for the update!
One more question,
when I send the encrypted firmware to someone,
he needs to update the firmware using the AVRootloader.exe, right?
Is the source code of AVRootloader.exe available (the part for updating
the firmware to the microcontroller)?
(I would need to integrate the feature of updating the firmware in my
own GUI)
Regards,
David
The sources for the AVRootloader.exe are'nt free avaiable.
There exists two possible ways for you:
1.) use the commandline to startup AVRootloader.exe. As example:
AVRootloader.exe -PCOM1 -B115200 -Fc:\test\my.acy -Apc
Startup AVRootloader.exe with COM1 and 115200 baudrate to execute file
my.acy and close the GUI after successfully finishing all actions. If
any error occur the GUI remains stay open. On creation of your encrypted
ACY file you choose wich action are todo when a customer execute this
file. Eg. you compile into you ACY file the HEX file for the FLASH
and/or the EEP File for the EEPROM, maybe choose the application version
number, and/or if the FLASH contents should be erased prior and/or
verified later.
2.) give me a contract and i take any changes for you :)
Please remember to clear in AVRootloader.ini the topic Password= if you
use encryted ACY files. Otherwise your customers have full access to
your devices. Setup in AVRootloader.asm
UseCrypt=1
UseCryptFLASH=1
UseSRAM=0
and change the provided password in BootKey: (maybe withelp of
AVRootloader.exe GUI) to provide the maximal security.
Best regards, Hagen
3.) i provide a AVRootloader.dll that export some DCOM/COM interfaces
with all functionality needed of the bootloader, without any GUI. If you
understand Delphi/PASCAL then you can in this way access with any other
programming language that supports DCOM/COM/ActiveX interfaces the
functionality of the bootloader.
Best reagrds, Hagen
Hello Hagen,
Thanks again for your answer!
Sending the firmware by USB "emulated RS232" has the problem that the
user needs to install a driver such as this one: D2XX Direct Drivers:
http://www.ftdichip.com/Drivers/D2XX.htm
I saw that this AN10711 bootloader emulates a Mass Storage Class Device,
so no drivers need to be installed. Then the user (or the application)
updates the firmware by directly copying it to the MSCD.
http://www.nxp.com/documents/application_note/AN10711.pdf
Would it be possible to combine such a bootloader with the encryption?
It's just an idea; I don't really have the budget to finance it. :'-)
Regards,
David
>Would it be possible to combine such a bootloader with the encryption?
yes if you have access to the source you can implement anything you
want.
As example should it possible to use a AVR that support USB. We have
basicly to implement in AVRootloader.asm only USB initialization and two
io-functions. But then you need even a driver for this custom USB device
on your PC and the AVRootloader.exe must be rewritten or a VCOM driver
to the custom USB driver must be written. Thus, useing todays
mass-products like common USB-RS232 cables are most times cheaper.
Best regards, hagen
Hi Hagen,
Versuche grad den Bootloader am ATMega128 auf PortF aber ich bekommen
immer:
C:\Data\AVR\AVRootloader.inc(308): error: Operand 1 out of range: 0x60
Gehts generell nicht oder mach ich was falsch ?
Sonst erstmal vielen danke für diese geniale Arbeit
Gruß
Hallo Hagen,
gerade wollte ich ein neues acy-File erstellen, musste aber festellen,
dass alle relevanten Buttons hierfür deaktiviert waren, obwohl ich mich
ordnungsgemäß verbinden konnte.
Es sind die Buttons Program, Verify und Compile grau.
Eine passende main.hex ist ausgewählt und existiert. Die Verbindung
funktioniert und es sind sinnvolle Device informationen aufgelistet:
Connection : 2-Wire
Device name : ATmega8, ATmega8A
Device signature : 1E9307
SRAM size : 1024 Byte
EEPROM size : 512 Byte
FLASH size : 8192 Byte
FLASH size for application : 7168 Byte
FLASH pagesize : 64 Byte
Bootloader size : 1024 Byte
Buffersize for data : 984 Byte
SRAM start address : 96
Bootloader version : 6
Use bootsection : Yes
Versioning supported : No
Cryptography supported : No
Bootloader information : (c) abcdef
Hat jemand eine Idee?
Viele Grüße,
Arne
Ok ich habs. Als ich das Zeilenende der Hex-Datei von win auf unix und
dann wieder auf win geändert hatte, ging es. Scheinbar gab es ein
Problem mit dem Zeilenendenformat. Nachdem ich die Hex-Datei aber neu
erzeugt hatte gings plötzlich ohne Probleme. Aber scheint so, dass das
Programm ein Problem mit dem Zeilenende hat.
Viele Grüße,
Arne
Hallo liebe Bootloader-Freunde :)
Erstmal Respekt für die tolle Arbeit.
Ich habe leider ein Problem. Ich versuche die oben gepostete Delphi
Source anzupassen. Ich benötige auch eine "Ein Button Bootloader"
Version. Leider bekomme ich mit der Delphi File keinen Kontakt. Aktuelle
Version läuft, also Hardware in Ordnung. Habe die aktuelle .ASM und die
alte "beiliegende" probiert. Ports jeweils angepasst, Takt eingestellt,
Fuse so stehen gelassen wie es mit der aktuellen funktioniert. Was ich
merkwürdig finde, die aktuelle Version schickt ja ein "BOOTLOADER" über
die Serielle Schnittstelle (FTDI-USB FT232RL) was ich auch über ein
Terminalprogramm mithören kann. Die "Delphi-Version" oben schickte erst
ein "BOOT" was ich in "BOOTLOADER" geändert habe. Trotzdem ohne Erfolg.
Wer kann mir helfen und mir evtl mal eine "Ein Knopf" Source Version
schicken?
Vielen Dank. MFG
Liebe Bootlader Freunde,
ich würde gerne mit einem C# Programm weiterhelfen,
es müsste mir nur jemand eine Spec. senden wo das
Protokoll genau erklärt ist.
Anbei ein Foto von einem Seriellen Testprogramm
Beste Grüße
Josef
Hallo Hagen,
Benutze deinen Bootloader schon in meheren Projekten und bin sehr
zufrieden damit.
Habe dich damals auch schon um Hilfe gebeten weil wir ein Modul für
avrdude schreiben wollten. Das haben wir auch erfolgreich gemacht und
versucht es in avrdude aufzunehmen.
Leider haben Sie es noch nicht aufgenommen.
Wir können jetzt somit mit einem embedded Linux Rechner und avrdude den
AVR8 über die RS232 oder RS485 flashen.
Klappt wunderbar soweit.
Jetzt haben wir aber einen anderen embedded Linux Rechner der eine RS485
Schnitstelle hat.
Das Problem dabei ist das er nach dem Senden zum Bootloader noch seinen
(send enable) 1 ms an lässt und somit keine Antwort vom Bootloader
mitbekommt weil der Bootloader ja sofort zurück sendet.
Ich bräuchte hierfür ein Delay. Habe schon probiert das selber
hinzubekommen aber ich bin nicht so fit in Assembler.
Könntest du mir bitte helfen.
Vielen Dank im Voraus.
Alex
Hallo Zusammen,
seit kurzen bin ich auch BEGEISTERTer Benutzer Haagens Bootloaders. Es
klappt auch alles perfekt (auch wenn ich noch nicht alle Einstellungen
durchschaue), und ich war erstaunt wie "einfach" alles ging (Hut ab).
Jedenfalls würde ich jetzt gerne das Eeprom über einen anderen AVR
lesen/schreiben wollen. Mit dem PC-Program geht das natürlich
einwandfrei, aber ich würde gerne die Konfiguration meiner AVR Projekte
(Werte im Eeprom) mit ner weiteren kleinen Schaltung einstellen können,
ohne PC. Kennt man z.B. im RC-Modelbereich bei den Brushless-Reglern.
Ich habe mich die letzten 2 Tage durch den ganzen Thread gewühlt, und
mir das was man im Protocolfenster sieht angesehen, aber so ganz klar
sind mir einige Punkte bzgl. der genauen Abläufe bei der Kommunikation
noch nicht (ich hoffe dass ich DEN entscheidenden Post nicht übersehen
habe, wenn doch, sorry schon mal).
HW-mässig will ich das mit 1-Wire machen, bei der Zusatzschaltung (ab
jetzt Programmer) werde ich einfach die RS232 des Programmers benutzten,
d.h. die 1-Wire-Schaltung mit den Dioden an Rx/Tx des Programmers. Es
geht also eigentlich "nur" darum was genau auf Rx u. Tx passiert.
Meine Fragen:
-Frage: habe ich nirgends erwähnt gefunden: Stoppbits,Paritybits, oder
nichts von dem?
zum Kommunikationsaufbau wird wohl als erstes vom PC die Zeichenfolge 9x
$00 + $0D + BootSign (bei mir "BOOTLOADER") abgeschickt, der PC empfängt
die selbe Zeichenfolge + zusätzlich die Zeichen $3E $1E
-Frage: wo kommen die Zeichen 3E 1E her? Was bedeuten sie?
anhand dieser Vorkommnisse erkennt das PC Program dass 1-Wire vorliegt
und "schaltet" in 1-Wire um
-Frage: woran genau erkennt der PC den 1-Wir mode? Daran dass die
1-Wire-Schaltung wie ein "Spiegel" wirkt und alles zurücksendet?
-Frage: was passiert eigentlich beim Umschalten in den 1-Wire-Mode? Wird
einfach dass was "rückgespiegelt" wird ignoriert?
als nächstes wird wohl so oft die Zeichenfolge 9x $00 + $0D + BootSign
vom PC gesendet, bis die Zielschaltung mit dem Bootloader eingeschalten
worden ist und dieser mit einer Antwort reagiert. Diese Antwort ist wohl
"komplizierter" aufgebaut. Was ich bisher meine rausgefunden zu haben
ist's so
wenn Encryption des Flashs an und Versioning:
ACYInfo (wie in einem der obigen Posts und im PC-Program genannt)
$20
2 Bytes Signature des AVR (also von 1EXXYY nur XX und YY)
$06 Version des Bootloaders
1 Byte Anzahl der Flashpages
4 Bytes mit der Version in umgekehrter Reihenfolge
1 Byte mit der "Konfiguration" des Bootladers
ohne Encryption und ohne Versioning:
2 Bytes Signature des AVR (also von 1EXXYY nur XX und YY)
$06 Version des Bootloaders
1 Byte Anzahl der Flashpages
1 Byte mit der "Konfiguration" des Bootladers
-Frage: Ist das richtig so? Wie sieht die Antwort im Allgemeinen aus?
-Frage: woran erkennt das PC-Program eigentlich dass die Antwort
vollständig gesandt worden ist? (bzw. woher würde es die Länge der
Antwort kennen?)
-Frage: Wie ist der Aufbau des Konfiguration-Bytes?
damit erkennt das PC-Program das Device als connected an
als nächstes ist dann einfach lapidar z.B. Reading EEPROM... zu
erkennen.
-Frage: was muss man zum Lesen/Schreiben machen? Das was oben in Haagens
Antwort vom 11.07.2010 12:11 steht? senden von $04 1 Byte Anzahl Bytes,
und den Inhalt einfach empfangen?
-Zusatzfrage: Woher kennt das PC-Program eigentlich die FLASH size for
application? Aus FLASH size - FLASH pagesize*No.of Flashpages?
Ich weis, viele Fragen, sorry dafür, aber vielleicht hat ja doch der
eine oder andere die ein oder andere Antwort :)
Thx,
Olli
Hallo Zusammen,
ich versuche mich gerade daran die AVRootloader DLL in eine Delphi
Anwendung einzubinden, das hat auch soweit alles funktioniert, nur
bekomme ich kein Connect. Mit der AVRootloader.exe funktioniert es
allerdings einwandfrei.
Die Schnittstelleneinstellungen sind bei beiden Programmen identisch.
Meine Delphi-Anwendung setzt folgende Timeouts:
1
function Tlasher.GetTimeouts: TTimeouts;
2
begin
3
Result.Connect := 0;
4
Result.Base := 50;
5
Result.Erase := 10;
6
Result.Flash := 15;
7
Result.Eeprom := 10;
8
Result.Buffer := 1;
9
Result.AppCmd := 0;
10
Result.KeepAlive := 250;
11
Result.RTSPulse := 0;
12
Result.RTSInterval := 0;
13
Result.ConnectTrials := 0;
14
Result.MaxPacketSize := 0;
15
Result.Options := 0;
16
end;
Die Timeouts in AVRootloader.ini sind identisch.
Um zu überprüfen, ob die Schnittstelleneinstellungen richtig sind habe
ich die Kommunikation mal mit PortMon aufgezeichnet.
AVRootloader.exe:
1
0 0.03930639 AVRootloader.ex IRP_MJ_CREATE VCP0 SUCCESS Options: Open
Der Ablauf ist soweit identisch, allerdings scheint meine Anwendung
nicht zu versuchen vom COM-Port zu lesen.
Zwischen Zeile 26 und 31 (jeweils IRP_MJ_FLUSH_BUFFERS) wird im
AVRootloader Mitschnitt wird versucht vom COM-Port zu lesen.
Bei meinem Programm folgt auf Zeile 26 (IRP_MJ_FLUSH_BUFFERS) in Zeile
27 direkt das nächste IRP_MJ_FLUSH_BUFFERS.
Das Ganze wiederholt sich in dem Protokollauzug in Zeile 38-43 bzw.
33/34
Ich weiß leider nicht, wie ich den Code einfärben kann um das zu
verdeutlichen, darum habe ich Leerzeilen eingefügt.
Ich bitte um Hilfe bei der Lösung dieses Problems. Weitern Code stelle
ich bei Bedarf noch zur Verfügung, ich halte mich aber weitestgehend an
die Beispiele weiter oben.
Allerdings habe ich den Eindruck, das ich einen ganz blöden,
offensichtlichen Fehler mache :(
Danke,
Thorsten
@Alfred
Alfred schrieb:> Hi,>> ich habe leider auch ein Problem mit dem Bootloader. Ich versuche schon> seit Stunden einen Bootloader für mein Mega128-Projekt zu finden. Hier> sind> mein Einstellungen:
Hast Du das Problem schon gefunden, ich versuche so ungefähr das Gleiche
wie Du, der PC bekommt aber keinen Connect zum Mega128 zu Stande? Er
bleibt in der Routine "send ident" und der mega128 antwortet nicht.
Warum....?
Grüße Chris
Mir gehts genauso, ein Mega1284P soll ein Bootloader bekommen,
beim Compilerlauf kommt dies:
error: Operand 1 out of range: z
warning: .cseg .db misalignment - padding zero byte
Hat jemand eine Ideeo wie es klappt?
Scheint eine Macke des 128 zu sein?
Louis
L. Schreyer schrieb:> Hat jemand eine Ideeo wie es klappt?> Scheint eine Macke des 128 zu sein?>> Louis
Hallo Louis,
der Fehler sitzt meist vor der Tastatur, bei mir war es jedenfalls so,
hatte das falsche "device file" included, es gibt für den 128 einige.
Evtl. liegt auch hier Dein Problem.
Grüße Chris
Nö, das war korrekt. Es war der Assembler, der wohl zu alt war. Ich habe
den neuesten von Atmel installiert, und dann ging es.
Durch die ganze Fehlersuche bin ich auf so manche Option gestoßen, die
in diesem doch sehr langen Thread verborgen liegt. Ich nutze ja schon
länger die DLL um in meiner Software den Upload der Firmware zu
ermöglichen. Aufbauend auf das Beispiel, dass ziemlich zu Anfang von
Hagen gegeben wurde.
Nachdem die neueren Versionen herauskamen, gab es auch Änderungen in der
DLL, die dazu führten, dass das ursprüngliche Beispiel nicht mehr
funktionierte. Da Hagen leider keine Doku der DLL herausgegeben hat
(verständlich, kostst Zeit und Arbeit) muss man sich da ein bisschen
selbst einfinden, was nicht immer einfach ist, da die Rückgabefunktionen
nicht immer selbsterklärend sind.
Verstreut in diesem Thread findet man dann die eine oder andere Info, zu
den Rückgabewerten und z.B. der Funktion Processmessages. So habe ich es
dann zum Laufen bekommen, aber wirklich 100% ist das nicht, da ich z.B.
bei Processmessages nicht kapiert habe was man da machen soll. Ich setze
das Ergebnis einfach auf False, dann gehts. Ich denke mal, da steckt
insgesamt viel mehr drin als ich ahne, daher wäre es immer noch super,
wenn es da eine Doku gäbe, die die ganzen Parameter usw. erklärt. Auch
die ganzen Timeouts, Options usw. Evtl. hat jemand ein Delphi-Projekt
mit allen Schikanen zum reinschauen?
Ich habe den Loader jetzt auf 3 Gerätchen am laufen, die ich für
Modellbaukollegen baue, zwei davon haben die 2er Version drauf, einer
die 6er. Dank der nun gefundenen Optionen der DLL kann ich beide mit
einer Software bedienen, das Option-Byte erlaubt es ja das Protokoll zu
ändern, alt und neu. Das neue Teil läuft sogar mit viel höherer Bitrate,
die man in der neuen DLL ja auch setzen kann, wieder so eine nette
Sache, die einem das Leben leichter macht.
Eine Frage hätte ich noch: Gibt es irgendwo eine Liste mit den
Rückgabewerten des Loaders? Wenn der PC Kontakt aufnimmt sendet der
Loader ja 5 Bytes, woran man wohl sehen kann ob ein Fehler auftrat.
Kennt jemand die Bedeutung der Werte?
Louis
Hallo zusammen,
Hab gerade den Bootloader ausprobiert und bin wirklich begeistert von
dem Teil. Dafür erst mal vielen Dank an Hagen.
Da ich mich bisher leider nur mit der Programmierung in C beschäftigt
habe, fällt es mir echt schwer den Code zu verstehen. Ich würde gerne
einen PIN des AVR, z.B. PC3 blinken lassen, während die neue Firmware
auf den Controller geschrieben wird. Kann mir vielleicht jemand sagen an
welcher Stelle im Programm ich das machen muss?
Vielen Dank und Gruß,
Bjoern
Hallo,
ich habe den Rootloader erfolgreich auf verschiedenen Prozessoren mit
Verschlüsselung eingesetzt (128, 644P, 328P). Nun habe ich eine
Applikation, bei welcher ich per Fuse den Reset des 328P abschalten muss
um einen Port-Pin zu gewinnen. Da fängt dann mein Problem an.
AVRootloader.EXE kann zum AVR nach Aus-und Einschalten der
Versorgungsspannung verbinden. Das Flashen der ACY-Datei wird jedoch mit
folgendem Fehler abgebrochen :
20.11.10-18:58:15-386 > Connecting on port COM4...
20.11.10-18:58:23-393 > Device connected
20.11.10-18:58:34-831 > Program...
20.11.10-18:58:34-832 > execute compiled data
20.11.10-18:58:34-832 > 1.2.0.0
20.11.10-18:58:34-832 > selected options in compiled file:
20.11.10-18:58:34-833 > - programming FLASH
20.11.10-18:58:34-833 > - FLASH data are encrypted
20.11.10-18:58:34-833 > - erase FLASH during programming
20.11.10-18:58:34-833 > - full verify FLASH after programing
20.11.10-18:58:34-855 > Cmd.SetBuffer.ResCheck(2) Error: Decryption
failed
Der gleiche Vorgang geht Problemlos bei einem 328P mit aktiviertem
Reset.
Kann jemand helfen ?
Danke, Rene
Hallo!
Nachdem ich mich nun mehrere Tage durch diesen Thread gekämpft habe,
habe ich nun den Bootloader mal eingesetzt.
Ich möchte über den Bootloader mein Programm vor unberechtigter
Benutzung und Vervielfältigung schützen, habe deshalb die
Verschlüsselung aktiviert:
Hier meine Settings:
.equ UseBootMode = 0
.equ UseWDR = 1
.equ UseSaveMCUSR = 1
.equ UseE2Write = 1
.equ UseE2Read = 1
.equ UseCrypt = 1
.equ UseCryptFLASH = 1
.equ UseCryptE2 = 1
.equ UseVerify = 0
.equ UseVersioning = 0
.equ UseSRAM = 0
.equ UseSpecialBootVect = 0
.equ UseSpecialWrite = 0
.equ UseSpecialWriteBoot = 0
.equ UseSpecialRead = 0
.equ UseSpecialMsg = 0
.equ UseAutobaud = 1
.equ UseResetDelay = 1
.equ UseUartInvert = 1
.equ UseRS485 = 0
.equ UseRS485Invert = 0
Solange ich nun keinerlei Lock-Bits setze geht alles wunderbar.
Setze ich
"Further programming and verification disabeld"
"SPM prohibited in Application Section" und
"SPM prohibited in Boot Section" funktioniert's noch immer wunderbar.
Aber bei diesen Lock-Bits kann ich den Flash immer noch problemlos
auslesen. Genau das möchte ich aber verhindern.
Setze ich nun
"Further programming and verification disabeld"
"LPM and SPM prohibited in Application Section" und
"SPM prohibited in Boot Section"
erhalte ich die Fehlermeldung:
28.11.10-18:58:13-867 > Program...
28.11.10-18:58:13-882 > execute compiled data
28.11.10-18:58:13-882 > selected options in compiled file:
28.11.10-18:58:13-882 > - programming FLASH
28.11.10-18:58:13-882 > - FLASH data are encrypted
28.11.10-18:58:13-882 > - erase FLASH during programming
28.11.10-18:58:14-413 > Cmd.WriteFlash.ResCheck() Error: Verify failed
Jetzt bin ich etwas ratlos.
Im vorausgegangenen Thread habe ich folgendes gefunden:
Lockbits:
LB=Further programming and verification disabled
BLB0=SPM prohibited in Application Section
BLB1=No lock on SPM and LPM in Boot Section
Aber wie gesagt, mit dieser Einstellung kann ich den Flash immer noch
problemlos mittels ISP-Adapter auslesen.
Was mach ich falsch?
Grüße
Erich
Jetzt werd ich immer ratloser, jetzt bekomme ich oben genannten Fehler
auch mit der Einstellung
LB=Further programming and verification disabled
BLB0=SPM prohibited in Application Section
BLB1=No lock on SPM and LPM in Boot Section
Bitte um Hilfe! Hagen weist du Rat?
Grüße
Erich
This is nice post for Bootloader,
Respect to Hagen and Peter.
I would like to use this bootloader with my application. I am using
Atmega32 Microcontroller and Top2005+ programmer.I can use this
Bootloader to protect my flash data.
What are the configuration want to do for atmega32.
can i use PORTB_1?
Do i want to use OSC to Microcontroller when i program it?
I can use 1 Wire right?
Windows application will automatically pick bootloader right?
How to set fuse bit for external 16MHZ osc?
thanx
Ich bekomme diesen Fehler.
21.12.10-15:51:53-063 > Connecting...
21.12.10-15:51:53-345 > Switch to 2-Wire mode
21.12.10-15:53:20-065 > ICOM: write error.
Bitte helfen Sie mir, dieses Problem zu lösen. Ich bin mit 2-Draht mit
Max232.
Gopy Nagalingam schrieb:> Ich bekomme diesen Fehler.>> 21.12.10-15:51:53-063 > Connecting...> 21.12.10-15:51:53-345 > Switch to 2-Wire mode> 21.12.10-15:53:20-065 > ICOM: write error.>> Bitte helfen Sie mir, dieses Problem zu lösen. Ich bin mit 2-Draht mit> Max232.
Hi!
A hint: Download one of the older packages with size more than 800kB.
These packages contain Readme's. f.e. How to configure the port. How to
configure the MAX232 (invert). etc.
The latest package unfortunately is without any explanations.
Regards
Erich
Hallo,
ich bin mal wieder seit langer Zeit im Forum, um eine Frage bezüglich
des
AVRootloader's zu klären. Der Seitenaufbau der Website dauert bei mir
leider ewig lange.
Ich benutze den Bootloader in einer Kleinserie, bstückt mit ATMega8. Als
Loader kam damals die AVRootloader.asm Version 1.0 vom 8.4.2008 zum
Einsatz. Mit Hilfe der Windows-Anwendung AVRootloader 1.0 kann ich die
Baugruppen einwandfrei mit der Firmware flashen.
Nun wollte ich den Kunden eine neue Firmware zur Verfügung stellen und
mit Hilfe der AVRootloader.dll, die ab Version 2.0 zur Verfügung steht,
eine eigene Anwendung schreiben, die es ermöglicht mit einem "Mausklick"
die Firmware in den ATMega8 zu transportieren.
Dabei stellte ich fest, dass die Windows-Anwendungen von Hagen ab V2.0
zwar den Bootloader in meiner Anwendung (V1.0) connected, die Firmware
aber leider nicht geflasht wird.
Hier das Protocol:
30.03.11-16:46:37-244 > Connecting...
30.03.11-16:46:37-307 > Switch to 2-Wire mode
30.03.11-16:46:40-552 > Device connected
30.03.11-16:46:43-235 > Program...
30.03.11-16:46:43-235 > execute compiled data
30.03.11-16:46:43-235 > selected options in compiled file:
30.03.11-16:46:43-235 > - programming FLASH
30.03.11-16:46:43-235 > - FLASH data are encrypted
30.03.11-16:46:43-235 > - erase FLASH during programming
30.03.11-16:46:43-235 > - programming EEPROM
30.03.11-16:46:43-235 > - EEPROM data are encrypted
30.03.11-16:46:43-266 > Cmd.SetBuffer.ResCheck(2) Error: 3F operation
failed
Bin momentan ratlos, vielleicht hat jemand einen Tipp?
Viele Grüße aus Karlsruhe
Wolfgang
Hallo,
ist zwar schon länger nichst mehr passiert in diesem Forum aber ich
probiers troztdem mal:
@ Hagen, bin nach wie vor begeisterter User des Bootloaders!
Es gibt die wunderschöne Funktion das Flashen von hex- und acy- files
per commandozeile und parameter zu automatisieren. Das funktioniert auch
wunderbar.
Frage: Gib es auch einen Kommandozeilen Parameter zum Generieren von
acy-files aus den hexfiles?
Ich möchte aus einer µC-Software 32 verschiedene Varianten mit
unterschiedlichen Parametern generieren und als ACY-File zur Verfügng
stellen. Bisher mach ich das immer händisch, was ziemlich zeitaufwändig
ist.
Wäre es möglich so was zu implementieren?
Viele Grüsse,
Andreas
Job zu vergeben !!!!!!!!!!!
Ich suche jemanden, der mir aus dem Code
zwei Programme strickt, einmal für mich um einen
Hex oder Bin zum Flashen für die Kunden zu erstellen,
einmal ein Progrämmchen für die Kunden um den
Bin auf das Gerät zu flashen
und natürlich nen Hex für mich mit dem passenden Loader
für meinen Chip.
Chip ist:
ATMega128
14,74456 MHz
UART0
RS485-Halbduplex, Richtungsumschaltung PortE.2 aktiv high
Wie gesagt, gegen Entlohnung, bitte um Angebote,
bin leider scheinbar zu doof um die Anpassungen selber vor zu nehmen :(
Hallo zusammen,
bei meinem Aufbau, hängt ein FT232RL am PORTJ des atm2560.
Nun ist ja bekannt, dass mit den Befehlen sbi, cbi, sbic, sbis nicht den
PortJ ansprechen kann.
Mann muss also im Programm die Bitbearbeitungsbefehle ändern:
zB. aus sbi PORTA,PA0
-->wird lds temp_r,PORTJ
sbr temp_r,(1<<PJ0)
sts temp_r,PORTJ
und aus sbis PINA,PINA0
wird dann lds temp_r,PINJ
sbrs temp_r,PINJ0
soweit so gut.
Es wird aber trotzdem keine Verbindung zum bootloader aufgebaut.
Wenn ich aber den PORTE benutze, dann funktioniert das ohne Probleme.
Ich kann mir das Verhalten irgendwie nicht erklären.
Hat einer von euch vielleicht eine Idee?
Hi,
ist es möglich irgendwie noch ein par bytes einzusparen?
zB, wenn beide Pins am selben Port sitzen?
micht nervt. dass ich mit meiner Lieblingskonfiguration immer 8Byte
zuviel für einen 512Byte Bootloader habe, wenn ich autobaud aktiviere
wär cool wenn einer der asm-freaks nochwas finden könnte, ich vermute
das fuchst auch noch andere
hier die Conf:
Hagen Re schrieb:> BootSign kürzen auf minimal 2 Zeichen und in Windows Software> entsprehend anpassen.
klar, das ist naheliegend, bringt aber nur 2 von 8 Byte.
die Frage ist, ob woanders noch was rausgeholt werden kann, zB durch
zusammenfassung durch gleiche Port- und Datanrichtungsregister.
Vlad Tepesch schrieb:> zB durch> zusammenfassung durch gleiche Port- und Datanrichtungsregister
wenn du mir sagst wo das der Fall ist ?
Ausser das du weitere Funktionalität "opferst" kenne ich keinen weiteren
Weg. Du könntest UseWDR=0 setzen was ich als gravierenden Nachteil
erachte da so eine wichtige Sicherheit gegen unverhersehbare Ereignisse
entfernt wird. Oder du benutzt UseAutoBaud=0 und musst dann immer mit
fester Baudrate arbeiten was die Ansprüche an das Kommunikationssystem
an enge Rahmenbedingungen inkrementiert. Oder eben auf die EEPROM
Routinen verzichten.
Du musst es auch mal so sehen: 512 Bytes sind 256 Assemblerbefehle und
das mit den von dir gewählten Funktionalitäten ist defakto schon enorm
kompakt. Jede der Funktionen, sei es Serielle Schnittstelle, FLASH
programmieren, der Command-Handler usw. habe ich Opcode für Opcode auf
Kompaktheit programmiert. Ich sehe keine weitere
Optimierungsmöglichkeiten wenn man nicht entscheidende Funktionalität
beschneiden möchte.
Gruß Hagen
hm es könnte noch einen Weg geben. Wir kürzen das BootSign auf 1 Zeichen
und benötigen somit keinen Zeiger mehr in den FLASH zum BootSign.
Nachfolgend die Änderungen zwischen den Lines markiert. Das BootSign
besteht aus dem Buchstaben Z.
Allerdings ist das BootSign auch ein Schutz gegen falsch ermittelte
Baudraten. Je kürzer dieses Sign je höher die Wahrscheinlichkeit das
krumm ermittelte Baudraten diesen Code überwinden und der Bootloader mit
schlechten Baudraten arbeitet.
Ich habe die Änderungen nicht getestet, also keine Garantie. Es müssten
14 Bytes weniger an Code rauskommen.
Den Wert bei Label BootSign: komplett löschen.
Gruß Hagen
br schrieb:> Hallo zusammen,>> bei meinem Aufbau, hängt ein FT232RL am PORTJ des atm2560.>> Nun ist ja bekannt, dass mit den Befehlen sbi, cbi, sbic, sbis nicht den> PortJ ansprechen kann.>> Mann muss also im Programm die Bitbearbeitungsbefehle ändern:>> zB. aus sbi PORTA,PA0>> -->wird lds temp_r,PORTJ> sbr temp_r,(1<<PJ0)> sts temp_r,PORTJ>> und aus sbis PINA,PINA0>> wird dann lds temp_r,PINJ> sbrs temp_r,PINJ0>> soweit so gut.> Es wird aber trotzdem keine Verbindung zum bootloader aufgebaut.> Wenn ich aber den PORTE benutze, dann funktioniert das ohne Probleme.> Ich kann mir das Verhalten irgendwie nicht erklären.> Hat einer von euch vielleicht eine Idee?
Es wird aus diesem Grund keine Verbindung zustande kommen. Durch deine
Änderungen ändert sich das kritsche Timing, und dh. jeder einzelne Takt
mehr macht den Source unbrauchbar.
Nun, leider ist es so das ohne Änderungen an diesen kritischen Stellen
dein problem nicht lösbar ist. Dh. das komplette Timing, AutoBaud,
waitf, putc und getc muß angepasst werden.
Wenn es für dich machbar ist nehme ein PORT auf den man normal mit
sbi/sbis zugreifen kann.
Ansonsten bleibt nichts anders übrig als das komplette Timing
anzupassen, und das ist ziemliche Frickellei da zb. die Proceduren getc
und putc in ihren Taktzyklenanzahlen gleich gewichtet geändert werden
müssen. Dann muss du noch den Korrektufaktor in der AutoBaud Funktion
anpassen, wenn ich mich recht erinner ist der jetzt -29 Taktzyklen. Der
sollte dann um rund +4 größer sein.
Und dann noczh die Benutzung von temp_r könnte kritisch sein. Man muß
sicherstellen das man zu diesem Zeitpunkt ein register nimmt das auch
frei verfügbar ist da ansonsten mit diesem Code wichtige Register
überschrieben werden könnten.
Gruß Hagen
charly schrieb:> Hallo Hagen,> liest du hier noch mit ?, hatte dich per PN angeschrieben> aber keine antw. erhalten ;(>> vlG> Charly
seit längerer Zeit schaue ich hier mal wieder rein. Warum die PNs nicht
ankommen weiß ich auch nicht, bzw. ich hatte vor einiger Zeit den Fall
das das AntiSPAM System meines Providers mal eben EMails löschte die es
nicht löschen durfte. Auffälig daran war das das meistens Absender waren
die häufig Newsletter versenden. Also alle EMailnewsletter von
XILINX,Alter,TI,Intel,MS,Lattice,NXP,Maxim waren davon betroffen,
inkluse einige wichtige Firmenmails von Auftraggebern die ihrerseits mit
ihrem Absenderadrese Werbung versendeten.
Hat übrigens par Wochen gedauert bis ich das bemerkte, bzw. bis mich ein
Kunde darauf ansprach.
Gruß Hagen
Lefebvre schrieb:> AVR is AT Tiny 85>> bug, i'm not flash a µC>> help me please>> best regard
change in AVRootloader.ini
[Timeouts]
base=50 or 100
best regards hagen
Andreas Baier schrieb:> Frage: Gib es auch einen Kommandozeilen Parameter zum Generieren von> acy-files aus den hexfiles?> Wäre es möglich so was zu implementieren?
diese Forderung hatten wir in diesem Thread schon öfters. Und ich habe
das auch immer noch auf der ToDo Liste, leider rückt diese in immer
weiterer Ferne und deswegen möchte ich keine falschen Hoffnungen wecken.
Machbar ist es und Konzept wie ich es machen würde kannst du weiter oben
im Thread nachlesen.
Gruß Hagen
Wolfgang O. schrieb:> 30.03.11-16:46:43-266 > Cmd.SetBuffer.ResCheck(2) Error: 3F operation> failed>> Bin momentan ratlos, vielleicht hat jemand einen Tipp?>> Viele Grüße aus Karlsruhe> Wolfgang
in AVRootloader.ini
[timouts]
eeprom=
größer machen.
Grüße zurück nach Karlsruhe, hagen
Hagen Re schrieb:> Vlad Tepesch schrieb:>> zB durch>> zusammenfassung durch gleiche Port- und Datanrichtungsregister>> wenn du mir sagst wo das der Fall ist ?
keine Ahnung, ich habe mir den Code selbst nicht imdetail angeschaut, da
ich nicht so in AVR-ASM drin stecke.
wenn du sagst, da ist nix mehr rauszuholen, glaube ich dir das.
Ich dachte halt, das da noch was zu holen sein könnte, wenn die SW auf
vielseitigkeit ausgelegt ist und da nicht das komplette Potential
ausgeschöpft hat, wenn beide Pins an dem selben Port hängen.
>> Ausser das du weitere Funktionalität "opferst"
Ich will ebend gerade nicht auf eine der genannten Funktionen verzichten
;)
Hagen Re schrieb:> hm es könnte noch einen Weg geben. Wir kürzen das BootSign auf 1 Zeichen> und benötigen somit keinen Zeiger mehr in den FLASH zum BootSign.
nur ein Zeichen ist natürlich auch nicht schön
trotzdem danke.
Gruß
Vlad
Hi Hagen, ich hab den Loader jetzt auf einen tiny461 gepackt
der Tiny soll mit 1Mhz laufen.
Baudrate wollte ich eigentlich 1200 benutzen, aber damit funktioneirt
der Bootloader im Autobaud scheinbar gar nicht.
stelle ich in der Gui auf höhere Baudraten funktioniert das connecten.
wenn ich programmieren will bekomme ich folgende Ausgaben:
1
26.01.12-23:56:49-640 > Connecting on port COM9...
2
26.01.12-23:56:49-640 > Timeout.Connect = 50 ms
3
26.01.12-23:56:49-640 > Timeout.Base = 50 ms
4
26.01.12-23:56:49-640 > Timeout.Erase = 10 ms
5
26.01.12-23:56:49-640 > Timeout.Flash = 15 ms
6
26.01.12-23:56:49-640 > Timeout.Eeprom = 10 ms
7
26.01.12-23:56:49-640 > Timeout.Buffer = 1 ms
8
26.01.12-23:56:49-640 > Timeout.AppCmd = 100 ms
9
26.01.12-23:56:49-640 > Timeout.KeepAlive = 250 ms
in AVRootloader.ini
Timeout.Base = 100 ms
setzen. Mehr kann ich auch nicht empfehlen, außer deine Schaltung mit
einem Oszi auch mal durchzumessen.
Gruß Hagen
Vlad Tepesch schrieb:> lösch ich das div8 (und asembliere neu natürlich) gehts
div8 heist was ?
Bei 1Mhz sollte die Baudrate nicht größer als 33kBit/s sein.
Ja klar! Es hägen ja andere sachen noch am Atmel. Ich habe nur die
Verbindung zum FT232R beschrieben. Da habe ich nur RX und TX dran, kein
RTS DTS usw.
Gruß
- Ante -
Hallo Zusammen,
erstmal, ich benutze Hagens Bootloader für meine Projekte aus dem
RC-Modellbaubereich (www.olliw.eu)... deswegen erstmal wieder 1000 Dank
an dich, Hagen, für diese tolle Arbeit!
Meine Frage wäre, hat Jemand von Euch schon mal probiert die 1-Wire
Verbindung über ein Bluetooth-Seriel-Modul ablaufen zulassen, bzw. hat
Jemand das schon erfolgreich hinbekommen?
Ich benutze den Bootloader mit UseUartInvert=0 im 1-Witre Modus (das
muss leider aus versch. Gründen so sein, ist also eine Randbedingung)
Ich habe das Bluetooth Arduino Modul von JY-MCU (nur als Beispiel, das
http://www.ebay.de/itm/ws/eBayISAPI.dll?ViewItem&item=250968195320&ssPageName=ADME:X:DERP:DE:1123).
Für die Umsetzung der TTL-Pegel auf die vom Bootloader erwartet
RS232-artigen Level benutze ich zwei Inverter eines 74HCT04, und als
"Widerstand" zwischen der Rx und Tx line habe ich einen 100 Ohm
Widerstand mit ner 1n4148 Diode (rictig rum) parallel geschaltet. Der
kleine Widerstand und die Diode sind wichtig um mit allen "meinen"
Geräten, bei denen ich die Eingangsbeschaltung nicht ändern kann, zu
funktionieren. Das mit dem Widerstand/Diode ist aber IMHO NICHT
relevant. Benutze ich einen USB-TTL Adapter dann funktioniert das
ausgezeichnet.
Benutze ich nun den Bluetooth-Adapter dann klappt das im Prinzip schon
auch, nur leider extrem instabil, d.h. die Verbindung geht sehr oft
einfach verloren. Ich habe Baudraten von 19200-57600, die bei Verwendung
des USB-Adapters+74HCT04Inverter+RD-Netzwerk problemlos funktionieren,
getestet. Immer das Selbe, Verbindung klappt... aber bleibt meistens nur
sehr kurz bestehen. EPPROM lesen geht z.B. gar nicht.
Ich kenne mich nun mit den "Geheimnissen" von Bluetooth überhaupt nicht
aus. So ganz naiv würde ich meinen dass Bluetooth anscheinend, im
Vergleich zu den USB-Seriel-Adaptern, nicht sehr gut beim Einhalten von
Zeiten ist. Aber Wissen tu ich's nicht.
Wie auch immer, kann das mit Blueetooth funktionieren, und wenn ja was
mache ich Falsch, oder kann das etwa prinzipbedingt gar nicht
zuverlässig funktionieren?
Danke,
Olli
Hi Olli,
Ich lese da nur 9600bps, hast Du aber sicher auch probiert...
btw: wie schwer ist das Teil?
Ansonsten befürchte ich mal, dass der Booloader ja mehr auf Bit Banging
angewiesen sein dürfte, was evtl. mit BT schwierig ist.
Aber das bin ich gespannt auf die anderen Antworten hier...
;)
Hallo Achim
9600bps geht bei mir eigentlich nie gut, bei verschiedenen
USB-TTL-Adaptern in verschiedenen Konfigurationen, deswegen 19200-57600.
Frag mich aber nicht warum. Der BT-Adapter alleine wiegt 3.5 g. Das mit
dem Bitbanging ist IMHO eine andere "Baustelle", der Bootloader benutzt
ja normales serielles Protokoll.
Cheers, Olli
OlliW schrieb:> dem Bitbanging ist IMHO eine andere "Baustelle", der Bootloader benutzt> ja normales serielles Protokoll.
Protokoll ja, AFIAK tut er das aber nur über Bit Banging, eben nicht
über die ATMega Hardware UART. Sonst wäre man schon auch etwas
eingeschränkt in der Pin Wahl.
Das funktioniert ja auch ganz prima, nur evtl. ist das ja ein Problem in
Zusammenspiel mit dem BT Modul, was dann nur mit 9600bps geht...
Vielleicht bringt es ja was ein bisschen mit dem XTAL Wert im Bootloader
auf 9600Bps zu korrigieren.
das BT Modul habe ich natürlich jeweils mit dem entspr. AT-Befehl auf
die gewählte Baudrate, also z.B. 19200, eingestellt. (mit falscher
Baudrate geht gar nichts, auch das Übertragen einfacher serieller Daten
nicht, ist ja aber auch irgendwo logisch :))
Du denkst wohl ein bischen in Richtung dass die Datenbytes an für sich
schon gar nicht zuverlässig übertragen werden? Wegen z.B. ungenauem
"Takt"? Hatte ich jetzt nicht vermutet, die Übertragung von "normalen"
Daten, also Daten die halt einfach nur ankommen müssen aber egal wann,
funktioniert, bzw. schien mir so. Muss ich nochmal genau testen ob es
auch da schon zu Problemen kommt.
Thx.
moin moin Hagen,
besteht die moeglichkeit bei der EXE ein Eingabefeld f. das
Passwort einzubauen ?, ein PW aus der .ini wird dann im speicher
ueberschrieben, ebenso waehre es nett wenn Compile auch ohne
angeschlossene Device funktioniert.
Das wuerde das erzeugen von ACY files extrem erleichtern, vielen
dank
vlG
Charly
Charly B. schrieb:> besteht die moeglichkeit bei der EXE ein Eingabefeld f. das> Passwort einzubauen ?, ein PW aus der .ini wird dann im speicher> ueberschrieben,
Lösche das Password in der .INI Datei und bei jeder Notwendigkeit wird
ein extra Dialog geöffnet.
> ebenso waehre es nett wenn Compile auch ohne> angeschlossene Device funktioniert.> Das wuerde das erzeugen von ACY files extrem erleichtern, vielen> dank
Das wurde schon öfters gewünscht und steht auf Top 1 der ToDo Liste. Die
Frage ist letzendlich nur wann ich mal wieder die Zeit finde, diese doch
aufwendigere Änderung, einzubauen. Das Problem dabei ist nämlich das
wichtige Parameter, die letzendlich von der AVRootloader Konfiguration
im AVR abhängig sind, manuell eingegeben werden müssen.
Gruß Hagen
Na gut, wenn Hagen hier keine neue Version reinstellt:
Wer versioning benutzt und den flash bis in die vorletzte/letzte page
vor dem bootloader nutzen will/muss - funktioniert nicht. Version kommt
auf eine falsche Adresse. Nicht verzweifeln - Hagen fragen.
Hi!
Ich nutze den Bootloader auch in ein einem privaten Modellbahnprojekt.
Zunächst mal Daumen hoch! Top Arbeit!
Nun würde ich gerne von meiner PC-Software aus den Bootloader füttern.
Ich programmieren in RealBasic. Hat das schon mal jemand gemacht?
Oder gibt es eine Protokollbeschreibung?
Einfachste Funktionen reichen. Wenn ich connecten und das neue hex-file
flashen könnte wär schonmal super.
Danke und Gruss,
Micha
Kannst du aus RealBasic die Kommandozeile benutzen ? Wenn ja ist dies
der einfachste Weg.
AVRootloader.exe -PCOM1 -B115200 -SBOOT -Dc:\Test\ -FTest.hex -ETest.eep
-K5441C8CA4DDF8EEA19AAAFD877AEB488 -Aepvc
Programmiert die Dateien Test.hex und Test.epp im Ordner c:\text\ über
COM1 mit 115200 Baud verschlüsselt mit dem Key
5441C8CA4DDF8EEA19AAAFD877AEB488 und mit dem BootSign 'BOOT', und wenn
alles glatt gelaufen ist wird AVRootloader.exe beendet.
Gruß hagen
Hallo hagen!
Danke für die Antwort!
Das habe ich auch schon probiert - funtioniert Prinzipiell auch - habe
dabei aber folgendes Problem:
Meine Software ist über RS485 mit den Controllern verbunden.
Mein Versuch sah so aus, das mein Programm einen der Atmegas in den
Bootloader geschickt hat, den ComPort geschlossen hat und über
Kommandozeile Dein Programm gestartet hat.
Allerdings habe ich das Timingmässig nicht hinbekommen.
Entweder war der Port noch offen und Dein Programm streikt oder der
Bootloader war im Atmega schon wieder verlassen.
Auch ein verlängern des bootdelay auf zB 1 Sekunde hats nicht gebracht.
Sollte ich - bevor ich im Atmega in den Bootloader hüpfe - noch
irgendwelche Einstellungen, zB am UART, vornehmen?
gruss,
Micha
Dein Program schickt deinen ATMega über RS485/232 in den Bootloader.
Dazu sendest du doch ein Kommando, damit deine Applikation auf dem AVR
darauf reagiert ?
Das kannst du uU. auch mit dem AVRootloader machen, in der INI die Werte
bei AppCommand, AppCommandResponse usw.
Gruß hagen
Ja.
Du setzt
[System]
AppCmd=BootStart/0D/0A
AppCmdResponse=BootHasStarted/0D/0A
[Timeout]
AppCmd=20
AVRootloader.exe sendet vor jedem Connect den Wert in [System].AppCmd,
wobei Sonderzeichen hexadezimal angegeben werden. Doppelslash // für
Slash.
Dann wartet AVRootloader.exe, wenn AppCmdResponse nicht leer ist, auf
diesen String von deiner Applikation im AVR.
Wenn AppCmdResponse empfangen wurde, oder wenn es leer ist, dann wartet
AVRootloader.exe [Timeous].AppCmd Millisekunden bevor es mit dem
eigentlichen Connect Aufbau beginnt.
Sollte der Connect fehlschlagen beginnt das ganze Spiel von vorne.
Es ist nun sinnvoll:
- AVRootloader.asm mit UseAutoBaud=1 und UseWDT=1 zu kompilieren
- in AVRootloader.exe die Baudrate einzustellen die deine Applikation im
AVR benutzt
Deine Applikation im AVR empfängt also den Wert aus [System].AppCmd,
antwortet wenn gewünscht mit dem Wert aus [System].AppCmdResponse und
startet dann den WatchDog Timer mit minimalstem Timeout = 20ms. Der WDT
reset den AVR und startet sauber über den Reset Vektor den Bootloader.
Das kann man auch hier im Thread alles nachlesen, ich weiß aber auch das
der Thread ziemlich lang ist ;)
Gruß Hagen
Hi!
Danke für die Antwort!
Ich habe (fast) den ganzen Beitrag gelesen. Nur so zusammensetzen konnte
ich die Infos nicht :)
Ich probiere es nachher aus...
Gruss,
Micha
Hallo Zusammen,
als erstes will ich Hagen für den super BL danken. "Kabelgebunden" ist
die SW (uC & PC) nicht aus dem Tritt zu bekommen.
Da kommen wir auch schon zu meinem Problem:
An einem M16 Uart hängt eine BTM-222 (SPP Profil) mit 19.2k. Ziel ist es
Messdaten zu senden (funktioniert auch) und ab und an zu flashen. Bis
zur Fertigstellung der SW lag die HW direkt neben dem PC und flashen
funktionerte super (Rest auch). Jetzt hab ich die HW an ihren
"Einsatzort" gebracht (ca. 30m entfernt) und kann nun nicht mehr flashen
--> Cmd.SetBuffer.ReadByte() ICOM: read error
RAM und E2P lesen geht meinsten, ebenso das (zyklische) senden der
Messdaten. Auch Diagnosebefehle an die Applikation werden richtig
beantwortet.
Stell ich die HW wieder zurück funktioniert auch wieder das flashen.
Ich nehme stark an, daß sich durch die Entfernung das Timing von Sende-
/ Empfangsdaten verschlechtert. Ich habe auch versucht in der INI Datei
die TO zu verändern - leider ohne Erfolg.
Habt Ihr einen Tipp wie wieder ein stabiles flashen möglich wird ?
Gruß
Frank
experimentiere mal mit
-> AVRootloader.ini -> [Timeous] -> MaxPacketSize=64...512
Ich würde nämlich eher davon ausgehen das das BTM-222 mit großen
kontinuierlichen Datenpacketen, die ja beim FLASH/EEPROM programmieren
auftreten und der Unterschid zu den anderen Packeten sind, nicht zurecht
kommt.
Ich habe selber mal mit dem BTM-222 Teilen rumgespielt und wenn ich eine
Wette abgeben müsste über deren Software dann das diese Software über
eine Mainloop per Polling jedes einzelnen Zeichens arbeitet und
demzufolge nicht interruptgesteuert geschweige denn ansynchron arbeitet
(also Mist aus Sicht der SW-Entwicklung ist).
MaxPacketSize setzt nun die maximale Packetgröße die die PC-Software
versendet. Normalerweise ist diese die maximale Größe des im AVR
vorhandenen SRAM Speichers minus par Zerquetschte für den Stack etc.pp.
Hat man nun einen Big-AVR mit viel SRAM dann kann diese Packetgröße
schonmal 1-8Kb betragen. Normalerweise ist es günstig wenn die
Packetgröße möglichst groß gewählt wird da so das SW-Handshaking
reduziert wird und ergo die Gesamtperformance steigt.
MaxPacktSize limitiert dieses Verhalten künstlich und wurde damals
eingebaut als es um die Unterstützung der TCP/IP-XPorts übers INet ging.
Denn auch dort gab es Latenzen die proportional zur Packetgröße zunahmen
und irgendwann so groß wurden das die Timeouts überschritten wurden.
Auch dort lag es letzendlich an der Softwareimplementierung der
Windows-XPorts Treiber.
Und wenn du kannst gehe mal mit der Baudrate runter, je mehr Zeit die
BMT-222 Software pro Zeichen in Relation zur Blutooth-Datenrate bekommt
desto besser.
Gruß Hagen
und noch was: setze AVRootloader.ini -> [Options] -> = 2 das aktiviert
den "Debug-Modus" der Software. Wenn du dann eine Connection aufgebaut
hast schaust du in das Protokoll rein und kannst dort nachschauen mit
wlcher MaxPacketSize sie real läuft. Nicht jeder Wert in der INI bei
MaxPacketSize kann benutzt werden, es bedarf eine Mindestgröße und ein
Mehrfaches einer FLASH Page, logisch da nur komplette Pages programmiert
werden können.
Gruß hagen
Hallo Hagen,
danke für deine Bemühungen, natürlich werde ich alle Infos her
verteilen.
Also:
1. Options=2
Damit bekomme ich gar keine Verbindung mehr. Bei mir gehen nur "0" für
deaktivierte Debug-Infos und "1" für aktive Debug-Infos.
Bei "1" sehe ich alle TOs (auch max Package Size)
2. MaxPacketSize=64...512
Der M16 hat ja 128B Pages, hab also alles von 128 bis 512 getestet (wird
auch bei den Debug-Infos angezeigt) → leider kein Unterschied
3. Base=120
Dieser Parameter hat massiven Einfluss auf die „Übertragungsqualität“.
Ist er zu hoch geht zuerst das SRAM lesen und dann das E2P lesen nicht
mehr. Bei zu kleinen Werten geht’s natürlich auch nicht mehr. „Bester“
Wert ist so bei 120
4. Enfernung
Bei ca. 30m bekomme ich das hier:
1
09.05.12-21:06:02-937 > Connecting on port COM12...
2
09.05.12-21:06:07-078 > Device connected
3
09.05.12-21:06:11-078 > Reading EEPROM...
4
09.05.12-21:06:14-765 > Reading SRAM...
5
09.05.12-21:06:37-328 > Program...
6
09.05.12-21:06:37-375 > execute compiled data
7
09.05.12-21:06:37-375 > selected options in compiled file:
8
09.05.12-21:06:37-375 > - programming FLASH
9
09.05.12-21:06:37-375 > - erase FLASH during programming
10
09.05.12-21:06:37-375 > - full verify FLASH after programing
bleibt nur noch:
1. Baudrate runter
2. Fehler im BTM-222 suchen:
- zB. alle Versorungspins mit Blockkondensatoren
- Qualität der Funkstrecke sicherstellen, denke das das ja den
Unterschied ausmacht
3. [Timeouts] -> Flash höher setzen, das ist der Wert der bestimmt wie
lange die Sofwtare nach einem FLASH Commando wartet
4. letzendlich die Feststellung das der Bootloader nicht mit dem BTM
funktioniert
Mehr kann ich leider auch nicht helfen.
Gruß hagen
Lieber Hagen,
kurze Frage: Warum hast Du Dich für XTEA + Doppel-CBC statt XXTEA
entschieden? Ich nehme an, dass die "eingebaute" Prüfsumme über alles
ein Vorteil Deiner Lösung ist. Wenn ich das richtig verstehe, wäre XXTEA
dafür schneller bei großen Blöcken (XTEA: N * 32 Runden, XXTEA: (N * 6 +
52 Runden).
Viele Grüße und schon vorab danke für Dein Feedback!
Tius
Das hatte mehrere Gründe:
1. XTEA ist auf AVRs effizienter
2. mit XTEA hatte ich Erfahrungswerte, XXTEA kannte ich damals noch
garnicht
3. alle Angriffe auf XTEA/XXTEA usw. brauchen bestimmte Vorrausetzungen
die in der Benutzung im AVRootloader nicht gegeben sind.
Zu Punkt 3.
Es geht primär um Known Plain Text Angriffe. Dh. der Angreifer ist
praktisch in der Lage eine gezielt gewählte Nachricht, unverschlüsselt,
dem Angegriffenen so unter zu schieben das dieser auf seinem System mit
seinem Passwort diese Nachricht verschlüsselt und diesen Ciphertext
wieder zum Angreifer zur Analyse sendet. Natürlich reicht da nicht eine
solche Nachricht alleine sondern es müssen schon tausende solcher
Nachrichten durchgeschleust werden damit dieser Angriff funktioniert. Es
handelt sich also im praktischen Sinne um einen sehr theoretischen, eg.
analytischen Angriff.
Die Arbeitsweise des AVRootloader widerspricht diesem Verhalten. Warum
sollte ein Herausgeber einer verschlüsselten HEX Datei nun für Andere
tausende HEX Dateien mit seinem Schlüssel verschlüsseln wollen ?
Dazu kommen aber noch par andere Punkte:
Mein XTEA benutzt einen äußeren Feedback Modus. Dieser soll
normalerweise die Abhängigkeiten zwischen allen sukzessiven
Nachrichtenblöcken, Teilstücke der Nachricht, inkrementieren. Dh. nur
wenn alle vorherigen Blöcke korrekt entschlüsselt wurden soll der
aktuelle Block ebenfalls korrekt entschlüsselt werden. Mit anderen
Worten: der letzte Block soll nur dann korrekt entschlüsselt werden wenn
die komplette Nachricht davor es auch wurde. Das macht mein Doppel-CBC.
Er teilt die 32 Runden des XTEAs in 2x 16 Runden und macht vor beiden
16'er Runden die CBC-Feedback Operation. Somit bewirkt diese Feedback
Operation bei der 2'ten 16'er Runde das in die internen Statusregister
des XTEAs Informationen einfließen die aus den teilverschlüsselten
Nachrichtenbits bestehen. Die Nachricht wird also indirekt (eg.
verschlüsselt) in den internen XTEA Status eingerechnet und damit ist
die komplette Verschlüsselung meiner XTEA Variante nicht nur vom
Schlüssel selber sondern auch von der Nachricht die verschlüsselt wird
abhängig, die Nachricht wird zu einem Teil des Schlüssels. Nun kommt der
Fakt hinzu das die AVRootloader Software jede Nachricht mit einem
zufälligen Datenblock am Anfang der Nachricht vor der Verschlüsselung
expandiert. Dh. in den XTEA laufen als erstes 16 Bytes an Zufall rein
und somit ist dies ähnlich wie ein externer, unverschlüsselter
zufälliger InitVector. Das hat zur Folge das man eben keine Known Plain
Text Angrigffe mehr sinnvoll durchführen kann da der real benutzte Plain
Text in der AVRootloader Software für den Angreifer eben unbekannt ist.
Da ja die bekannte HEX Datei noch intern um 16 Bytes Zufall am Anfang
expandiert wurde die dem Angreifer aber unbekannt sind, und da der
Doppel-CBC Modus sicherstellt das der interne Status der XTEA Register
auch immer indirekt abhängig sind vom verschlüsselten Nachrichtenblock,
hier also der zufällig gewählte 16 Bytes Block gleich zu Begin der
Verschlüsselung der aber Einfluß hat auf alle nachfolgendenen Datenbits
der kompletten Nachricht. Ergo: Known Plain Text Attack mit AVRootloader
ist unpraktikabel.
Positiver Seiteneffekt ist nun das man am Ende der Nachricht einen
Signaturblock verschlüsselt dranhängen kann der später bei der
Entschlüsselung als Verfikation dienen kann. Ich benutze dazu 4 Bytes
des benutzten XTEA Schlüssels. Da dies nur ein kleiner Teil des
kompletten Keys ist denke ich ist das der beste Kompromiss ist, besser
als mit einer allgmein bekannten Signatur zu arbeiten, da ja der Key
selber für jeden Anwender und Projekt zufällig gewählt wird.
Für die Bewertung der Sicherheit eines Systemes reicht es also nicht aus
sich nur auf die Sicherheit des Ciphers alleine zu konzentrieren sondern
man muß immer das Gesamtsystem analysieren. Im Falle des AVRootloaders
heist dies das die Benutzung des speziellen Feedback Modus, die
Anwendung eines verschlüsselten internen IVs, das geplante
Benutzerverhalten usw. es sicher macht. Ein Cipher wird nicht
zwangsläufig unsicher in einem jeweiligen Kontext nur weil er auf
spezielisierte Angriffe anfällig ist. Denoch sollte man bei der Wahl des
Ciphers während der Planung eines Sicherheitskonzeptes natürlich schon
bekannt schwache Cipher nicht mehr berücksichtigen ;)
Gruß Hagen
Zur Korrektur für die Experten: oben meinte ich Known und/oder Choosen
Plain Text Angriffe. Beide werden erschwert. Choosen Plain Text ist eine
Untergruppe der Known Plain Text Angriffe wobei der Angreigfer den
Inhalt des Plain Texts gezielt beeinflussen kann. Known Plain Text heist
erstmal nur das der Plain Text bekannt ist. Und dies träfe auf AVR HEX
Files auch mit hoher Wahrscheinlichkeit zu da ja am Anfang jedes HEX
Files mit hoher wahrscheinlichkeit immer ähnliche Dateninhalte
vorkommen, sprich ISR Vektoren, bekannter Startup Code des C Compilers
usw. Deswegen stand es ausser Frage das der AVRootloader jede Nachricht,
eg. HEX File, am Anfang mit Zufallsbytes expandiert und der Feedbak
Modus eine "Alles oder Nichts" Verschlüsselung garantieren musste.
Gruß Hagen
Hallo Hagen,
vielen Dank für die ausführlichen Erläuterungen! Bei mir geht es um eine
andere Anwendung, da muss ich das wohl selber noch einmal bewerten.
Zur Sicherheit will ich die Punkte noch einmal kurz zusammenfassen:
1. Effizienz
Ich kenne bisher keine XXTEA-Implementierung in Assembler für AVR. Das
Verfahren sieht etwas komplexer aus als XTEA, dafür ist die Rundenzahl
bis zu Faktor 5 kleiner. Käme aus meiner Sicht auf einen Versuch an.
Allerdings dürfte ich Schwierigkeiten haben, Deinen Optimierungsgrad in
Assembler zu erreichen. Das spricht zunächst sehr für XTEA :-)
2. Erfahrungswerte
Habe ich weder für XTEA noch für XXTEA. Soweit ich die Analysen (v. a.
http://eprint.iacr.org/2010/254.pdf) verstanden habe, haben beide
Verfahren theoretische Schwächen, sind aber für mittlere
Sicherheitsanforderungen mehr als ausreichend. Natürlich nur, wenn kein
Fehler bei der Verwendung gemacht wird. XXTEA ist wohl aufgrund der
kleineren Rundenzahl tendenziell schwächer ("We describe a
chosen plaintext attack for XXTEA using about 2^59 queries and
negligible work.")
3. IV
Der erste Block sollte sich natürlich auf keinen Fall wiederholen. Dein
Verfahren wirkt wie ein veränderlicher IV und scheint mir dafür gut
geeignet zu sein. Bei Verwendung von XXTEA könnte das ähnlich erfolgen.
4. Doppel-CBC und geheime Signatur
Da reicht mein kryptografisches Verständnis leider bei weitem nicht.
Einen geeigneten Betriebsmodus braucht man natürlich zwingend bei XTEA.
Wenn ich das richtig verstehe, nutzt Du die Fehlerfortpflanzung und die
Signatur bei Deinem Verfahren zur sicheren Erkennung der Integrität der
Gesamtdaten. Bei einem Betriebsmodus ohne Fehlerfortpflanzung müsste
also Integrität anderweitig sichergestellt werden.
Viele Grüße und noch einmal herzlichen Dank für die Infos!
Tius
1. Effizienz
XXTEA wird meines Erachtens inperformanter sein, ich lasse mich aber
gerne vom Gegenteil überzeugen. Begünden würde ich meine Aussage mit dem
Fakt das der Registerdruck und SRAM verbrauch für Zwischenresultate, auf
grund der größeren Blockgröße, ansteigt. Somit steigt die Anzahl von
Registerkopieroperationen und Variablen. Ich habe sehr bewusst mich für
XTEA entschieden, zur Auswahl stand auch zB. RC4, weil man alle
Parameter schon in Registern halten kann.
2.
>("We describe a>chosen plaintext attack for XXTEA using about 2^59 queries and>negligible work.")
Mal überlegt wieviel 2^59 ist ?
Angenommen pro Query 1 Mikrosekunde dann sind dies 18279 Jahre
Rechenzeit. Für einen Mathematiker/Kryptographen ist es korrekt
infinitimal zu denken, ein Techniker sollte solche Aussagen einfach mal
nachrechnen ;)
Und wie gesagt, mit Hilfe des verschlüsselten und für den Angreifer
unbekannten IVs erledigt sich ein solcher Angriff, bzw. wird 2^(8 * IV
Länge in Bytes) = 2^128, im Fall vom AVRootloader, mal komplizierter.
3. IV
Der InitVector muß nicht zwangsläufig geheim sein. Standard ist es sogar
so das dieser einfach ein mit Zufall befüllter 0. Datenblock ist der
eben nicht verschlüssselt wird. Der IV sollte mit Zufall befüllt werden
und ist damit immer veränderlich bezogen auf seinen Inhalt. Technisch
muß der IV denoch mit den verschlüsselten Daten gespeichert werden.
Ich bevorzuge dagegen diesen IV mit zu verschlüsseln so als wenn man die
eigentliche Nachricht am Anfang vor der Verschlüsselung um Zufallsbytes
erweitert hat. Technisch bleibt es der gleiche Aufwand wie vorher aber
dieser Zufall ist eben noch zusätzlich durch das Passwort des Ciphers
geschützt. Somit stehen für einen Angreifer weniger Informationen zur
Verfügung als mit externem unverschlüsselten IV.
Und wie ichs oben schon verargumentierte heist dies das Known Plain Text
Angriffe eben schwierger werden da ein wichtiger Teil des realen Plain
Texts eben nicht mehr unverschlüsselt/ungeschützt ist.
4. Doppel-CBC und geheime Signatur
>Wenn ich das richtig verstehe, nutzt Du die Fehlerfortpflanzung und die>Signatur bei Deinem Verfahren zur sicheren Erkennung der Integrität der>Gesamtdaten. Bei einem Betriebsmodus ohne Fehlerfortpflanzung müsste>also Integrität anderweitig sichergestellt werden.
Korrekt. CBC ist normalerweise ein sich selbst synchronisierender
Feedback Modus. Tritt ein Bitfehler in einem Block auf dann ist
mindestens dieser Block und eventuell der nachfolgende Block falsch
entschlüsselt. Spätestens der übernächste Datenblock wird wieder korrekt
entschlüsselt. Die Wahl was man nun nimmt hängt von der Zielsetzung ab.
Im Fall des AVRootloaders ist es ganz einfach diese Entscheidung zu
treffen. Was für einen Sinn hat es wenn ein x kBytes Program geflasht
wird wenn nur ein einziges Bit falsch geflsht wurde ? Keinen. Ergo ist
keine Selbstsynchronisation notwendig sondern das exakte Gegenteil. Es
muß sichergestellt werden können, mit höherer bzw. gleichhoher
mathematisch statistischer Wahrscheinlichkeit als die Wahrscheinlichkeit
das eine FLASH Speicherzelle stirbt, das man fehlerhafte Übertragungen
oder unberechtigte Manipulatonen am Bitstrom detektieren kann.
Gruß Hagen
hi,
Ich würde gern die DLL in einem eigenen kleinen Tool benutzen. Hat denn
jemand zufälligerweise ein kleines Beispielprojekt, wo die dll schon
benutzt wird?
Ich habe keinenblassen schimmer, wie ich die dll benutzen muss.
viel dokumentation ist da ja leider auch nicht drin ;(
Sprache sollte irgendwas aus c#, c++ oder delphi sein.
Danke Vlad
Hi,
Ich mein Tool jetzt mit Delphi gebaut, aber ich komme mit der
AVRootloader-Integration nicht wirklich weiter.
Unten bestehenden Code habe ich mir aus Fragmenten in diesem Thread
zusammengeklaubt.
Allerdings bleibt er irgendwann hängen.
die letzte Callback in die er geht ist die GetAppCmdResponse.
Dannach gibts eine laaange Wartezeit und dann kommt eine MessageBox:
1
I Project xyz raised too many consecutive exceptions:
2
'integer divide by zero at 0x0036c8e2'. Process Stopped. Use Step or Run to continue.
ok, mir ist jetzt aufgefallen, dass die TTimeouts mehr werte enthält und
die ProcessMessage-Methode false zurückgeben sollte.
Außerdem habe ich noch try-catches um die Interface-calls gemacht.
die entsprechenden geänderte Routinen siehe unten.
Das Connect scheint jetzt zu klappen.
beim programm bekomme ich allerdings folgende Ausgabe:
Ich bekomme allerdigns keine Exception von der Dll.
Ein weiteres Problem ist, dass ich nicht weiß, wo ich den Communicatoin
Port wieder schließen soll.
Wieseo sact er "execute compiled data"? ich gebe ihm doch nur ein
eeprom-file.
Ein anderes Problem, was ich habe ist, dass ich den Code nicht
vernünftig debuggen kann, da Delphi ständig wegen Exceütions meckert,
die jedoch wieder gefangen werden.
Hollo Forum!
Ich hab das Problem, dass beim programmieren die Fehlermeldung kommt:
"cannot find RJMP to Main".
Ich Benutze verwende einen Tiny167 und AVRStudio 4.18
Ich glaube zu wissen wo der Fehler liegt.
Im .lss file ist steht bei 000
0: 0c 94 28 00 jmp 0x50 ; 0x50 <__ctors_end>
aber kein rjmp.
Wie bringe ich den Compiler dazu ein rjmp zu verwenden?
Gruß Julinho
Das Problem ist, dass bei Tinys mit 16kByte Flash nicht jede Adresse mi
RJMP erreichbar ist. Deswegen benutzt der Compiler wahrscheinlich den
JMP-Befehl.
Entweder man erzwingt durch Inline-Assembler einen RJMP, oder Hagen muß
das PC-Programm modifizieren.
Hallo@all,
hab den Bootloader bis jetzt immer erfolgreich einsetzen können und bin
auch voll auf Begeister von dem Teil. Nun habe ich das Problem das mit
dem neuesten AVR Studio 6 beim kompilieren eine wahrscheinlich vielen
bekannte Fehlermeldung auftaucht. Gibt es hier im Studio 6 irgendeine
Option die ich übersehen habe oder weiss irgendwer warum das mit Studio
6 auf einmal nicht mehr funktioniert?
Relative branch out of reach E:\Dokumente und Einstellungen\Eigene
Dateien\Atmel Studio\avrootloader\avr\AVRootloader.inc 288
Es betrifft diese Stelle
1
rjmp Flashend +1
im diesem Makro:
1
.macro jmpapp
2
.if BLS
3
rjmp FLASHEND +1 ; run application
4
.elif BootStart
5
rjmp BootStart-1 ; run application
6
.else
7
rjmp BootStart ; dummy
8
.endif ; .if BLS
9
.endmacro
Kann da bitte einer weiterhelfen? Danke im voraus...
Gruß Morxi
Servus,
ich hab momentan ein kleines Problem, und zwar mit der Codegröße des
Programms.
Ich verwende den Bootloader auf einen Attiny45 und mit der von mir
verwendeten Konfiguration sollte ich 3584 Byte für die Applikation haben
(wird auch so unter Device Information angezeigt).
Mein Programm hat momentan eine Codegröße von 3454 Byte, damit
funktioniert der Flashvorgang auch problemlos. Wenn die Codegröße des
Programms durch eine kleine Änderung auf 3460 Byte ansteigt, wird das
Programm zwar problemlos geflasht, allerdings wird das Programm danach
nicht ausgeführt, der Attiny bleibt im Bootloader hängen.
Ist das Verhalten normal oder hab ich irgendwas übersehen?
Hallo Hagen,
wollte mal fragen, ob es schon eine Möglichkeit gibt, eine acy Datei zu
erzeugen, ohne dass Kommunikation zum Bootloader besteht? Das wäre echt
hilfreich für mich, da ich unter Linux arbeite und die Erzeugung so
wahnsinning umständlich ist. Alternativ baue ich auch gerne ein kleines
Programm, was dies macht, wenn du mir den Quellcode der passenden
Funktion gibst. Das Script/ Programm würde ich dann auch hier
reinstellen.
Es wäre echt eine unheimliche Erleichterung für mich und wahrscheinlich
auch für viele andere.
Viele Grüße,
Arne
br schrieb:> -->wird lds temp_r,PORTJ> sbr temp_r,(1<<PJ0)> sts temp_r,PORTJ
Ich glaube die dritte Zeile ist falsch.
Müsste wohl so sein:
sts PORTJ,temp_r
Rolf
Hallo Hagen,
ich hab zwar alle Post durchgelesen, hab aber folgendes nicht gefunden:
Ich würde gerne Deine PC Software (AVRootloader.exe) benutzen.
Ich habe einen selbstgebauten RS232-485 Wandler. Hier muss man aber über
den RTS Pin der RS232 Schnittstelle zwischen Senden und Empfangen
umschalten.
Ist das irgendwie möglich ?
Danke,Grüße
L.W
Hallo Hagen,
zuerst einmal Danke dass du deinen Bootloader hier zur Verfügung
stellst.
Ich habe ihn zwar bisher noch nicht verwendet, aber er erscheint mit
sehr universell und auch für meine Belange geeignet.
Nun habe ich aber folgende Frage:
Wenn ich eine eigene Hostsoftware entwickeln möchte fehlt mir eine
Protokollbeschreibung, oder habe ich etwas in diesem "dicken" Thread
überlesen. Ansonsten stellst du eine DLL zur Verfügung welche in
Eigenentwicklungen genutzt werden kann, oder?
Falls du hier noch liest, oder mich sonst jemand ein wenig erleuchten
kann wäre ich für eine kurze Rückmeldung sehr dankbar.
Gruß
Jürgen
ich habe die Absicht den AVRootloader aehnlich zu nutzen wie in der
letzten Mail beschrieben.
Grund ist, dass ich den in einer Umgebung einsetzen moechte, bei der
zahlreiche Microcontroller (AVR und andere) beteiligt sind.
Ein zentralerer Controller (ARM programmierbar in C, C++ und natuerlich
Assembler) haelt alle zur Distribution notwendgne Firmware Varianten und
programmiert diese bei Bedarf in die Peripherieprozessoren.
Dazu muesste ich in der Lage sein, ein ACY File mit dem ARM in einen AVR
zu laden.
Das Protokoll muss also selbst implementiert werden.
Geht natuerlich mit reverse Engineering und dem lesen diverser Mails aus
dem Therad und vielen Tests, schoener waere ein Quellcode (Sprache egal,
ich spreche fast alles) oder eine Beschreibung.
Vemute aber mal, das es Hagen zuviel Arbeit mit der Beschreibung macht.
Denn ansonsten wirkt der Loader aufgrund des geringen Codeumfanges sehr
geeignet.
Denn es macht wenig Sinn einen kleinen Tiny AVR mit riesiegne
Bootloadern zu beladen und wenig Platz fuer eigenen Code zu haben.
Somit ist der Bootloader incl. Verschluesselung usw. in weniger als 512
Worten schon eine tolle Sache.
Hat da vielleicht jemand noch ne Info ?
nachdem ich mich nun einige Stunden mit den Mails/Thread als auch den
Quellen beschaeftigt habe, bin ich inzwischen soweit mich mit einem AVR
mit AVRootloader an Board basismaessig unterhalten zu koennen.
Eine Analyse der ACY Files sieht allerdings leider nicht so aus, als ob
man diese direkt fuer eine eigene Implementation verwenden kann.
Ich war davon ausgegangen, dass das ACY die bereits verschluesselte
Kommunikation entahelt und ich nicht selbst noch eigene Routinen dafuer
schreiben muss.
Das sieht nicht so aus, entweder der Code ist wie gedacht entahlten und
zusaetzlich nochmal veschluesselt oder er besitzt eine grundsaetzlich
eigene Veschluesselung, die dann im Einsat nochmals umgesetzt wird.
Dann waere natuerlich klar, warum es die Quellen des PC Tools bzw. der
DLL nicht frei gibt.
Aber spielt ja auch keine Rolle. Dann muss man das ja anhand der
vorliegenden Infos nochmals implementieren.
Danke auf jeden Fall an Hagen, das er sich die wahnsinnige Muehe gemacht
hat den AVR so kompakt in Assembler zu programmieren. Die
grundsaetzliche Funktion in einer Hochsprache oder ineffizienterem
Assembler Code waere ja schon einige Arbeit gewesen, aber das ganze dann
so zu optimieren.
Tolle Sache.
Da mir jetzt klar ist, dass ich die Hostseite ohne groessere Probleme
hinbekommen werde, werde ich den Loader bei mir einsetzen und Morgen
erst einmal meine AVRs mit dem PC Tool beschreiben und in Kuerze dann
das Comm Tool komplettieren.
Viel Spass noch mit dem Loader.
Arne Helms schrieb:
Hallo Arne,
zwar schon alter Beitrag aber folgendes:
Ich nutze auch stets Linux und mit Wine per Kommandozeile klappt auch
der AVRootloader einwandfrei. Ich musste nur die gemappte COM
Schnittstelle direkt angeben, da mein Wine den AutoDetect nicht
unterstuetzt:
Also:
wine AVRootloader.exe -PCOM1 ....
Klappt einwandfrei.
Gruss
Werner
> Hallo Hagen,>> wollte mal fragen, ob es schon eine Möglichkeit gibt, eine acy Datei zu> erzeugen, ohne dass Kommunikation zum Bootloader besteht? Das wäre echt> hilfreich für mich, da ich unter Linux arbeite und die Erzeugung so> wahnsinning umständlich ist. Alternativ baue ich auch gerne ein kleines> Programm, was dies macht, wenn du mir den Quellcode der passenden> Funktion gibst. Das Script/ Programm würde ich dann auch hier> reinstellen.>> Es wäre echt eine unheimliche Erleichterung für mich und wahrscheinlich> auch für viele andere.>>> Viele Grüße,>> Arne
Hallo zusammen,
@Hagen: Klasse Arbeit, Danke!
Leider habe ich ein kleines Problem: Ich nutze den Bootmode 3 = start on
watchdog reset or by call from application.
Ist nur der Bootloader installiert funktioniert das Verbinden mit der
AVRootloader GUI einwandfrei, auch mehrmals Connect, Disconnect, ....
Sobald ich einmal mein User-Programm geflasht habe bekomme ich keine
Verbindung mehr. Ich kann sehen, dass alle 2 Sekunden ein Watchdog-Reset
kommt. Mein User-Programm schaltet eine LED ein nach ca. 2 Sekunden geht
sie kurz (Bootdelay) aus.
Das Log sagt:
08.04.13-18:16:57-372 > Connecting on port COM16...
08.04.13-18:16:57-559 > Switch to 1-Wire mode
08.04.13-18:16:57-637 > Error: no Device found
Die Parameter in der AVRootloader.ini sind die Standardwerte.
Hat da jemand einen Tipp für mich?
Gruß
Jürgen
Hallo zusammen,
nachdem ich nun den Bootloader sauber laufen habe und mit Hagens GUI
problemlos connecte und flashe, versuch ich nun Hagens DLL in ein Delphi
Programm zu packen.
Hier mal das Log mit Hagens GUI wo es funktioniert:
1
30.04.13-17:09:22-375 > Connecting on port COM4...
2
30.04.13-17:09:22-376 > Timeout.Connect = 100 ms
3
30.04.13-17:09:22-377 > Timeout.Base = 100 ms
4
30.04.13-17:09:22-378 > Timeout.Erase = 10 ms
5
30.04.13-17:09:22-379 > Timeout.Flash = 50 ms
6
30.04.13-17:09:22-380 > Timeout.Eeprom = 10 ms
7
30.04.13-17:09:22-381 > Timeout.Buffer = 1 ms
8
30.04.13-17:09:22-382 > Timeout.AppCmd = 20 ms
9
30.04.13-17:09:22-383 > Timeout.KeepAlive = 100 ms
Danach wirft DoConnect eine Exception ohne Beschreibung ()
.... mein Sourcecode im Anhang als zip-File
Kann mir da wer unter die Arme greifen?
Gruß
Schorsch
Hallo zusammen,
nachdem ich den Bootloader vor langer Zeit mal sehr erfolgreich getestet
und benutzt habe, will er nun leider nicht mehr :-|.
Hier das Setup:
- Eigenbauplatine mit einem ATMega88PA
- Rechner mit Windows 7x64
- 5V FTDI Adapter
Board lässt sich mittels STK500 per ISP programmieren und funktioniert
auch wunderbar. Die UART Schnittstelle funktioniert einwandfrei aus dem
Programm und die Daten erscheinen über den FTDI im hterm.
Eingesetzt wird der Bootloader Version 6.
Kompiliert wird mit AVR Studio 4.19 Build 730 (AvrAssembler2,
avrasm2.exe Version 2.1.42).
Vorgehen:
1. AVRootloader.aps im Studio geöffnet
2. .include "m88PAdef.inc" einkommentiert. Der Rest der includes ist
auskommentiert.
3. Bis auf UseAutobaud = 1 und UseResetDelay = 1 stehen alle
Einstellungen auf 0
4. RX_PORT = PORTD RX = PD0
5. TX_PORT = PORTD TX = PD1
6. XTAL = 14745600 (die UART Kommunikation läuft bei 115200 einwandfrei)
7. BootCodeSize auf 0 gesetzt und kompiliert
8. .cseg sagt bei genutzter Größe 422
9. BootBodeSize auf 422 gesetzt und neu kompiliert (jetzt zeigt .cseg
424, aber das hab ich nach Anleitung ignoriert)
10. Fuses:
- BootSZ (Bootsize): auf size = 256 words eingestellt (0x0F00)
- BootRST aktiviert
- SUT_CKSEL steht auf Ext. Crystal 8.0- MHz ... + 65 ms
- Sonstige Fuses bis auf SPIEN sind aus (RSTDISBL, DWEN, WDTON,
EESAVE, CKDIV8, CKOUT)
11. Fuses programmiert
12. hex File geflasht und verified. Keine Fehler.
13. Board an den FTDI angesteckt.
14. AVRootloader.exe gestarted und Com port des FTDI eingestellt. Sign
ist BOOTLOADER wie auch im Bootloader.asm (BootSign: .db "BOOTLOADER")
15. Nach dem Klicken auf "Connect to device" mehrmals das Board
resetted. Aber er bekommt keine Verbindung. TX des FTDI blinkt kräftig
beim Connect-Versuch. Hab 9600 bis 115200 baud durchprobiert, aber
leider kein Erfolg. Auch ein Tauschen der RX und TX brachte leider
keinen Erfolg.
Hab zusätzlich auch im FTDI die Timeoutzeiten auf 5ms verringert und die
Buffersize für Senden und Empfangen auf 64 reduziert.
Was macht eigentlich genau die BootMsg? Ist das ein "String" der am
Anfang des Bootloaders ausgegeben wird??
So langsam bin ich ratlos und hoffe Ihr könnt mir helfen!!
Beste Grüße,
Michael
OK war klar ... nach Stunden des rumprobierens hab ich jetzt mal noch
das UseUartInvert auf 1 gesetzt.
Und siehe da ... es funktioniert!!!
Beste Grüße,
Michael
Arne Helms schrieb:> Hallo Hagen,>> wollte mal fragen, ob es schon eine Möglichkeit gibt, eine acy Datei zu> erzeugen, ohne dass Kommunikation zum Bootloader besteht? Das wäre echt> hilfreich für mich, da ich unter Linux arbeite und die Erzeugung so> wahnsinning umständlich ist. Alternativ baue ich auch gerne ein kleines> Programm, was dies macht, wenn du mir den Quellcode der passenden> Funktion gibst. Das Script/ Programm würde ich dann auch hier> reinstellen.>> Es wäre echt eine unheimliche Erleichterung für mich und wahrscheinlich> auch für viele andere.>>> Viele Grüße,>> Arne
Moinmoin
i meine Hagen hat mal gesagt das steht auf der TO DO Liste,
i trigger es auch mal wieder an da ich auch sehr gluecklich
darueber waehre, wie siehts aus Hagen ?, vielen Dank schonmal
im vorraus & ein schoenes WE
vlG
Charly
Hallo zusammen,
das ist echt ein super Bootloader. Ich habe ihn jetzt auch ans laufen
gebracht. :-)
Nun möchte ich aber in meinem C-Programm, welches ich mit dem Bootloader
auf den AVR Brenne den Bootsign auslesen.
Hintergrund ist der das ich 7 AVR’s habe mit unterschiedlichen Zeiten.
Jeder AVR hat seine eigene Bootsign.
Ich verstehe nicht ganz wie ich nun die Bootsign auslesen kann um dann
die richtige Zeit auf dem richtigen AVR anzuwenden.
Könnt ihr mir da helfen?
Danke und Grüße
Tim
Morxi schrieb:> hab den Bootloader bis jetzt immer erfolgreich einsetzen können und bin> auch voll auf Begeister von dem Teil. Nun habe ich das Problem das mit> dem neuesten AVR Studio 6 beim kompilieren eine wahrscheinlich vielen> bekannte Fehlermeldung auftaucht.>> Relative branch out of reach E:\Dokumente und Einstellungen\Eigene> Dateien\Atmel Studio\avrootloader\avr\AVRootloader.inc 288>> Es betrifft diese Stellerjmp Flashend +1 im diesem Makro:> .macro jmpapp> .if BLS> rjmp FLASHEND +1 ; run application> .elif BootStart> rjmp BootStart-1 ; run application> .else> rjmp BootStart ; dummy> .endif ; .if BLS> .endmacro
Auch wenn die Frage schon etwas älter ist, für alle die durch Google
hierhin weitergeleitet werden:
Wenn man in Zeile 288 rjmp gegen jmp ersetzt, funktioniert es wieder.
> jmp FLASHEND +1 ; run application
Hallo,
Ich bin auf der Suche nach einem Linux-Kommandozeilenprogramm (ohne den
ganzen Wine-Quatsch, es soll in einem kleinen embedded Linux laufen),
mit dem man dem AVRootloader (Flash & EE) beschreiben kann.
Einzig brauchbares Ergebnis meiner Suche war ein avrdude-patch von
Sascha Warner (
http://lists.nongnu.org/archive/html/avrdude-dev/2010-02/msg00005.html
).
Ich vermute mal, dass sein Code auf Hagens Orgnial PascalCode (hier auch
in einem der zip-Attachments zu finden) basiert.
Beide Codes sind jedoch derart lang und komplex, dass man sie nicht "mal
eben so" kompilieren kann und dann ausprobieren, ob sie mit einem via
/dev/ttyS... verbundenem AVR reden.
Gibt es eigentlich eine Beschreibung des Rootloader-Protokolls?
Ich hatte ganz naiv gehofft, dass das Rootloader-Protokoll so
kompliziert nicht sein kann wie die oben genannten, seeehr langen
Programmcodes.
Die meisten Bootloader arbeiten doch alle irgendwie nach dem Muster
"Sende mir 512 Bytes, und ich schreibe sie in den Flash und schick dir
den CRC davon".
Klar- Magics, Timeouts, Befehlscodes, Speicheradressen sind auch dabei,
aber ich hatte gehofft dass es trotzdem nicht derart komplex ist.
Verschlüsselung und Versioning benötige ich nicht, lediglich Flash && EE
schreiben.
Danke schonmal,
Mario
wenn du keine verschluesselung & co brauchst gibt es
hier andere 'einfache' Bootloader denk ich...
es ist aber auch nix gehextes einen einfachen Bootloader
zu schreiben
vlG & schoenes WE
Charly
Hallo Charly,
Ich habe schonmal versucht einen eigenen Bootloader zu schreiben.
Allerdings in C, und ich habe ihn nicht kleiner als 513 Bytes gebracht -
(und er war noch nichtmal vollständig). Das war mir zu viel Platz.
Hagens Rootloader ist halt doch sehr kompakt geschrieben, und kann alles
das was ich mir wünsche, und es lässt sich auch alles, was ich nicht
brauche, rauswerfen - wodurch er auch sehr klein wird.
Oder kann mir jemand einen simplen Bootloader empfehlen, der
* in 512 Bytes passt,
* Flash und/oder EEPROM beschreiben kann (inkl. verifizieren, aber
auslesen, verschlüsseln etc. ist nicht nötig)
* dessen uC Quelltexte halbwegs verständlich sind - zumindest der
Konfigurationsteil
* Über die serielle Schnittstelle ansprechbar ist (kein
Baudraten-erkennen nötig, aber nice-to-have: Möglichkeit ein
Driver-Enable für RS485 zu bedienen).
* Nach Reset kurz auf einen Magic auf der seriellen Schnittstelle
lauscht, und, wenn das nach einer gewissen Zeit nicht kommt, selbst
beendet
* eine Beschreibung seines Protokolls hat oder ein Kommandozeilen
Linux-Flashprogramm hat.
Bisher habe ich keinen Bootloader gefunden der das soweit unter einen
Hut gekriegt hat (mit Ausnahme des letzten Punktes) als Hagens, daher
bin ich primär auf der Suche nach seinem Protokoll als nach Alternativen
(bin aber open minded ;-) ).
Hallo,
Ich habe einen AVRootloader-Client für Linux geschrieben - bisher kann
er "nur" Upload auf Flash und EEPROM (mir genügt das), aber er ist
leicht erweiterbar. Der Code läuft übrigens auch unter Windows.
Mich wundert es etwas, dass es bislang keinen Bedarf nach einem
Linux-AVRootloader gegeben hat (ich habe jedenfalls keinen gefunden).
Bei mir z.B. hängt ein AVR via serieller Schnittstelle an einem
RaspberryPi, und ich wollte, dass dieser auch den Firmware-Upload
übernimmt:
Eine technische Frage habe ich jedoch noch zur Funktionsweise dieses
Bootloaders:
Ich habe dem bekannten Windows-Programm mit einem PortSniffer-Programm
beim Upload zugeschaut:
Dabei ist mir aufgefallen, dass sie in Blöcken von ca. 16KB (!) auf
einmal an den AVR lädt - aber soviel SRAM hat der AVR doch garnicht, um
das zu puffern (uns später in den üblichen 512 Byte Blöcken in den Flash
zu schreiben).
Also wieso funktioniert das ganze dann überhaupt?
Ich dachte immer, alle Bootloader empfangen jeweils immer nur einen
FlashPage-grossen Block, dann schreiben sie ihn weg, und dann senden sie
eine Bestätigung, dass man ihnen den nächsten Block senden darf.
Interesse gab es schon an Linux.
Ich hatte auch mal einen Nachmittag angefangen das ganze mit Crypto etc
zu implementieren, dann fehlte aber die Zeit und es ist nix fertig
geworden.
Das ist schon fast ein Jahr her, da in dem Projekt wo der AVR genutzt
werden sollte dann doch ein kleiner ARM eingesetzt wurde.
Sowiet ich den AVR Code ueberblicke wird da wohl online decodiert und
geschrieben, nachdem geloescht wurde.
Kann auch sein, dass die Blockgroesse von dem jeweiligen AVR Typ und
dessen Blockgroesse abhaengt.
So genau erinnere ich mich nicht mehr.
Danke auf jeden Fall schonmal fuer die Implementierung.
Gruss
Werner
Hallo,
gerade mal das Compilieren getestet und auf zwei kleine Dinge gestossen
Erstens muessen beim g++ die char als vorzeichenlos vordefiniert sein,
sonst gibt es zumindestens Warnungen beim Compilieren.
Zweitens existiert das Subdir test nicht, in den das Output File
geschrieben werden soll.
Angepasste Zeile des compile.sh
g++ -o ./avrootloader -funsigned-char -lrt -DLINUX *.cpp
Verschluesselung scheint nicht integriert zu sein so wie ich sehe.
Trotzdem super.
Gruss
Werner
Hallo,
Danke fürs Feedback!
Korrekt, Verschlüsselung (sowie Versionierung, und Download von Flash,
EEPROM, SRAM) ist (noch) nicht implementiert.
Korrekt, das mit dem ./test Unterverzeichnis ist noch ein Rudiment
meines Entwicklungs-Szenarios.
Korrekt, das mit den unsigned chars nölt der g++ gerne mal an. Die
Option -funsigned-char macht Sinn, passieren kann nicht viel wenn man
die Warnung ignoriert.
Ich wollte noch darauf hinweisen, dass ich meinen Linux-Rootloader nicht
an allen Varianten der AVR-Gegenseite getestet habe.
Genaugenomen nur an einem ATmega1284p mit 18,432MHz, fixer 115kBaud
Firmware- und Bootloader-Speed, und im AVRootloader alles disablet
ausser Upload Flas und Upload EEprom (damit er in 512 Bytes passt). Bei
Bedarf kann ich auch den Asm posten.
Ebenfalls will ich nochmal darauf hinweisen, dass ich das mit der
PageSize noch nicht ganz geblickt habe:
Wie gesagt, ich habe beobachtet, dass das Delphi-Programm den AVR mit
16K-grossen Blöcken beschiesst, und mir rätselhaft ist, wie der AVR das
so schnell puffern und/oder wegschreiben kann.
Der Linux-Bootloader ist daher vorsichtig und schickt immer nur
512-Byte Blöcke.
Das könnte jedoch für irgendwelche ATTinys auch schon zu gross sein,
daher gibt es die Optionen "-pf FLASHPAGESIZE" und "-pe EEPROMPAGESIZE"
um das ggf. runterzusetzen.
Ein ToDo ist deshalb auch, dass der Linux-Bootloader die
Bootloader-Signature genauer parst, und daraus selbstständig vernünftige
Presets für den Zielprozessortyp benutzt.
Im Delphi-Programm steckt das alles schon irgendwie drinnen (im Reiter
"Device Information"), aber ich hab noch nicht gefunden, wie es das
dekodiert und/oder nachblättert.
Achja, noch eine Empfehlung:
Sehr praktisch ist, wenn man in seiner Firmware bzw seinem
UART-Protokoll das Kommando zu einem Soft-Reset gleich dem
Bootloader-Trigger setzt, dann ist das Ding an bequemlichkeit kaum zu
überbieten und man muss auch keine RTS- oder DTR- Leitungen an
Reset-Pins hängen:
Mario schrieb:>> Ebenfalls will ich nochmal darauf hinweisen, dass ich das mit der> PageSize noch nicht ganz geblickt habe:
IMHO bezieht sich das ganz klar auf die hardware definierte Größe der
Speicherseiten. Daran kann man z.B. entscheiden, wie viele Seiten
gelöscht werden müssen, falls man nur einen Teilbereich beschreiben
will.
> Wie gesagt, ich habe beobachtet, dass das Delphi-Programm den AVR mit> 16K-grossen Blöcken beschiesst, und mir rätselhaft ist, wie der AVR das> so schnell puffern und/oder wegschreiben kann.
Dein ATmega hat doch 1KB SRAM, was 64 Flash Seiten entspricht. Meiner
Rechnung nach steht dann mindestens 63 Seiten als Puffer zur Verfügung.
> Der Linux-Bootloader ist daher vorsichtig und schickt immer nur> 512-Byte Blöcke.> Das könnte jedoch für irgendwelche ATTinys auch schon zu gross sein,> daher gibt es die Optionen "-pf FLASHPAGESIZE" und "-pe EEPROMPAGESIZE"> um das ggf. runterzusetzen.
Die Namensgebung würde ich überdenken.
Es ist auf jeden Fall geschickt, die erlaubte Puffergröße in der
Anwendung zu errechnen. Hagen macht das ja auch anhand der Device id.
Ich hab da damals eine Formel von Hagen genannt bekommen:
1
(SRAM_Size div PageSize -1) * PageSize +24
Schau mal hier die Posts am 03.01.2010 und 04.01.2010.
Meiner Erfahrung nach ist es wichtig immer die Flashseiten komplett zu
schreiben. Warum weiß ich nicht.
> Ein ToDo ist deshalb auch, dass der Linux-Bootloader die> Bootloader-Signature genauer parst, und daraus selbstständig vernünftige> Presets für den Zielprozessortyp benutzt.> Im Delphi-Programm steckt das alles schon irgendwie drinnen (im Reiter> "Device Information"), aber ich hab noch nicht gefunden, wie es das> dekodiert und/oder nachblättert.
Schau mal in "AVRootloader.dev" rein.
Achim X. schrieb:>> Wie gesagt, ich habe beobachtet, dass das Delphi-Programm den AVR mit>> 16K-grossen Blöcken beschiesst, und mir rätselhaft ist, wie der AVR das>> so schnell puffern und/oder wegschreiben kann.>> Dein ATmega hat doch 1KB SRAM, was 64 Flash Seiten entspricht. Meiner> Rechnung nach steht dann mindestens 63 Seiten als Puffer zur Verfügung.>
Sorry, das habe ich irgendwie nicht verstanden:
Der ATmega1284p hat 4k SRAM und eine SPM_PAGESIZE von 256 words == 512
Bytes. Mehr als 7 Pages puffern kann er also kaum.
Wo liegt mein Denkfehler?
Ich habe mir den PortSniff nochmal angesehen und nachgezählt:
AVRootloader.exe schickt dem AVR folgendens:
1
Port geöffnet durch Vorgang "AVRootloader.exe" (PID: 2004)
Der 805 Zeilen lange Block ist durchgehendes Senden und entspricht weit
über 13 kB (-> verdächtig ähnlich zu "Buffersize for data", s.u.) - wie
will der AVR das puffern? Bei 115kBaud the fly wegschreiben kann ich mir
kaum vorstellen, Flash löschen und beschreiben dürfte nicht so schnell
sein.
Wie kann das ganze also funktionieren?
Abgesehen davon: Mit dem selbstständigen herausfinden der korrekten
Page- bzw- Puffergrössen via Formel und .dev-File stimme ich dir
natürlich zu, das werd ich mir jetzt mal alles anschauen...
Das sagt übrigens AVRootloader unter Device-Information:
Sorry, ich meinte natürlich 16KB SRAM nicht 1KB...
Dein Denkfehler besteht darin, nicht die Daten von Deiner MCU richtig
angeschaut zu haben.
So zeigt auch die .dev Datei
Vielleicht verwechselst Du das mit der EEProm Größe = 4KB.
Lies auch mal Seite 300 f. im Atmel Manual zum Thema Flash. Da steht
eindeutig 128 words /page size.
Also 64 * 256 = 16KB, oder?
Kein Problem also mit den von Dir angenommenen 13KB in den Puffer und
dann write Flash Command und fetisch.
Flash ist ziemlich zügig; EEProm dauert dagegen länger beim internen
Übertragen aus dem Puffer.
> SRAM size : 16384 Byte> FLASH pagesize : 256 Byte> Buffersize for data : 16152 Byte
(SRAM / PageSize -1) * PageSize + 24 = 16152 Bytes maximal am Stück.
+24 für Extradaten wenn man mit Verschlüsselung arbeitet, 3x8=24 also 3
Cipherblöcke a 8 Bytes mit den verschlüsselten zufälligem Init-Vector,
Versionsinformationen und Cipher-Message-Authentication Prüfsummen.
Somit verbleiben minimal 32-24=16 Bytes für den Stack (32 bytes minimale
PageSize). Man sendet also (SRAM / PageSize -1) FLASH Pages am Stück
wenn man den FLASH programmieren möchte. Beim EEPROM/SRAM ist diese
Regel unwichtig ausser den +24 Bytes, die sind immer identisch wenn man
verschlüsselt arbeitet.
Die Latenzzeiten von zB. USB-Serial-Wandlern oder TCP/IP-Serial-Wandlern
wie der XPORT haben mich dazu bewogen so große Datenblöcke wie möglich
in einem Rutsch zu senden. Diese Treiber/Hardware hat große Latenzen
wenn man ständig zwischen Senden und Empfangen von Bytes umschaltet und
dann warten muß. Dies macht einen enormen Anteil an der Performance des
AVRootloader's aus. Wichtig ist nur das man diese Datenblöcke nicht
größer als obige Formel macht. Man kann in AVRootloader.ini dieses
Blockgröße beschneiden indem man zB. MaxPacketSize=512 setzt.
Nach dem Senden dieser Pakete werden die Daten entschlüsselt, was sehr
schnell geht im Vergleich zum Programmieren des FLASHs oder EEPROMs. Die
PC-Software wartet dann entsprechend der Anzahl transferierter FLASH
Pages -> AVRootloader.ini -> [TimeOuts] Flash=25 ms * Pages an
Millisekunden.
Das Löschen des FLASHs erfolgt noch vor dem Senden dieser Pakete als
eigenständiges Kommando. So hat die PC-Software die Chance mit
unterschiedlichen Wartezeiten für das Löschung und Schreiben der
FLASH-Pages zu arbeiten und hat auch nach dem Löschen eine Rückmeldung
vom AVR Bootloader im Falle eines Fehlers.
> Im Delphi-Programm steckt das alles schon irgendwie drinnen (im Reiter> "Device Information"), aber ich hab noch nicht gefunden, wie es das> dekodiert und/oder nachblättert.
An Hand der 3 Bytes Signatur die gleich am Anfang der Kommunikation vom
AVR gesendet werden schlägt die PC-Software in der Datei
AVRootloader.dev Datei nach. Ich habe mich bewusst für diesen Weg
entschieden da so 1. im AVR FLASH nur 3 Bytes als Signatur nötig sind
ohne all die anderen Infos. Und 2. kann man so in Zukunft sehr einfach
in AVRootloader.dev neue AVRs nachtragen ohne das man ständig alles neu
kompilieren muß. Und 3. die Daten die Atmel in seinen Includes einträgt
sind nicht immer korrekt, man sollte sich also auf diese Infos nicht
verlassen und im eigenen Sourcecode direkt darauf zugreifen ohne sie
vorherig überprüft zu haben. Das geht aber nicht aus Sicht eines
Programmiers eines universellen und zukunftsfähigem Bootloaders, denn
ich weiß ja nicht welche AVrs in Zukunft auf dem Markt sind.
Gruß hagen
Hallo Hagen,
wirklich ein super Bootloader Dein AVRootloader.
Vielen Dank nochmals auf diesem Weg für die tolle Arbeit!!!
Besonderer Vorteil aus meiner Sicht: man kann ihn unter 512 Bytes
bringen, wenn man die Verschlüsselung weg lässt, trotzdem erlaubt er
noch EEprom Zugriff.
Der weg ihn ohne DLL in Delphi einzubinden, war anfangs mangels Doku
schon ein wenig holperig, aber ich kann gut verstehen, dass Doku
schreiben nicht eben Deine Leidenschaft ist. Meine auch nicht ;)
BTW: Kannst Du bestätigen, dass man das Flash immer als komplett Seiten
in den Buffer schreiben muss (also immer ein glattes Vielfaches der
Seitengröße)?
Jain ;)
Man programmiert immer eine Page, so funktioniert die Hardware. Man kann
aber auch erstmal eine FLASH Page lesen, im Buffer nur die Bytes ändern
die interessant sind und dann die Page, quasi teilweise modifiziert,
wieder neu programmieren.
Schau mal in Datei Special.inc bei Write_Flash(), diese Funktion kann
FLASH Pages auch Bruchstückenweise neu schreiben, auch das 2 Bytes
Alignment ist dabei egal, d.h. man kann an ungeraden FLASH Adressen
beliebige Daten aus dem SRAM neu programmieren. Diese Funktion kann
direkt in GCC C Source aufgerufen werden. Man linkt sie einfach mit in
den Bootloader ein -> UseSpecialWrite=1 setzen, dann wird am Ende in der
letzten FLASH Page eine Sprungtabelle hinterlegt mit der man dann aus
dem eigenen C-Program diese Spezial Funktionen aufrufen kann.
Ab Label wf4: findest du die Loop die den FLASH Buffer lädt, entweder
mit dem Inhalt aus dem FLASH oder dem Inhalt aus dem übergebenen SRAM
Buffer, je nach Addresszähler. Wenn der FLASH Buffer voll geschrieben
wurde wird die Page erst gelöscht dann mit dem FLASH Buffer Inhalt
programmiert. Danach gehts auf zur nächsten Page solange bis der Inhalt
aus dem SRAM Buffer = Parameter Size = 0 wurde.
D.h. Write_Flash() könnte defakto den kompletten FLASH aus dem SRAM
heraus neu programmieren falls genügend SRAM zur Verfügung stünde. Es
ist dabei eben egal ob die Adresse an Wordgrenze ausgerichtet ist und ob
der SRAM Datenbereich eine ganze Page an daten enthält. Anders
ausgedrückt, man kann ein einziges Byte im FLASH neu schreiben lassen,
intern wird aber immer eine komplette Page neu programmiert, dann eben
mit dem Originalem Inhalt + 1 geändertes Byte.
Gruß Hagen
Danke für die Erklärung zu Special_Write!
Ich gehe derzeit so vor, dass ich entweder das komplette Flash neue
schreibe, oder aber den alten Inhalt Seitenweise auslese, die Seite(n)
lösche, den Inhalt ändere und die Seite(n) zurückschreibe.
Beim kompletten Schreiben hatte ich dann Probleme, wenn ich mitten in
einer Seite aufgehört habe, weil halt alle Bytes geschrieben waren.
Geholfen hat die Seite mit 0FFh zu füllen und komplett zu ende zu
schrieben.
Hagen Re schrieb:> 2 Bytes> Alignment
Klingt, als könnte das der Schlüssel sein...
Edit: Nö. ist er nicht, ich muss die Seiten komplett rüberschicken sonst
steigt der Bootloader aus.
welchen Bootloader meinst du ?
Du kannst den FLASH immer nur Pageweise programmieren. Du kannst aber
durchaus nur Teile einer Page verändert programmiern. Dazu liest du die
Page in den FALSH Page Buffer ein und nur die Bytes die geändert werden
sollen schreibst du in diesen Buffer. Wenn du Assembler verstehst dann
schaue dir meine write_flash() Procedure an, die macht das so.
Das Verfahren verstehe ich schon.
Meine Absicht war:
1. AVRootloader ein page erase command für die betroffene Seiten
schicken
2. Nur die benutzen Bytes schicken (fill buffer), z.b. nur Byte 1 bis
23, schicken.
3. Als Abschluss write flash command.
Da muss ich halt bei Schritt 2 immer eine volle Seite schicken.
Vielleicht liegt es auch ein meiner Handhabung, ich werd mir das nochmal
anschauen...
achso, AVRootloader's FLASH Command kann nur Pageweise arbeiten. Das ist
der Preis den man zahlt wenn man mit weniger als 512 Bytes an FLASH für
den Bootloadercode auskommen möchte. Dann muß man Intelligenz auslagern
in die PC-Software. Davon abgesehen stellt sich die Frage wie sinnvoll,
eg. wahrscheinlich ist es das man mit einem Bootloader Programme flashen
möchte die kleiner als eine Page sind. Mit anderen Worten: das was du
möchtest ist keine gewöhnliche Bootloader Funktionalität mehr.
Gruß hagen
Vielen Dank nochmal für die Erklärung.
Ne, ich finde die Funktionalität von AVRootloader völlig in Ordnung und
ausreichend. Ich wollte nur Klarheit, ob ich einen Fehler bei mir
übersehen habe oder meine Vermutung richtig war.
Es ging immer um die letzte Flashseite, die fülle ich dann mit 0ffh auf.
Guten Abend,
hier ein Update meines Linux-Uploaders:
Neben einem variierbaren Timeout beim "fangen" des Bootloaders habe ich
jetzt auch das von Hagen & Achim erwähnte .dev-File eingebaut
(get_dev_by_id).
"Eingebaut" im doppeltem Sinne: zum einen als externe Datei
AVRootloader.dev, die im selben Dir wie die "exe" liegen muss, zum
Anderen noch als Fallback als einkompilierteListe (devlist.h)).
1
pi@raspi1% ./run.sh
2
avrootloader (LINUX): start...
3
avrootloader - upload settings:
4
- Portname : /dev/ttyUSB1
5
- Portconfig: baud=115200 parity=N data=8 stop=1
6
- Flashfile : ./test/bkb5.hex
7
- Eepromfile: ./test/bkb5.eep
8
- Trigger : <rest>
9
Opened serial port /dev/ttyUSB1 (baud=115200 parity=N data=8 stop=1) handle=3.
10
Catching Bootloader ... \ 97 05 06 04 30 success!
11
Device name : ATmega1284P
12
Device signature : 1e9705
13
SRAM size : 16384 Byte
14
EEPROM size : 4096 Byte
15
FLASH size : 131072 Byte
16
FLASH pagesize : 256 Byte
17
Buffersize for data : 16152 Byte
18
Uploading File ./test/bkb5.hex (20020 Bytes) to Flash...
19
Upload succeded.
20
Uploading File ./test/bkb5.eep (42 Bytes) to EEPROM...
21
Upload succeded.
22
Hit any Key to exit Bootloader mode...
23
Exiting Bootloader, Starting Firmware.
24
Closed serial port.
25
pi@raspi1%
Zur Transfer-Buffer-Size:
Rechnerisch komme ich zwar auf die bereits erwähnten 16152 Byte
Transferbuffer-Größe (die ich jetzt auch nicht mehr als "Pagesize"
benenne).
Allerdings hatte ich kein rechtes Glück damit, auf einen Schlag 16152
Bytes hochzuladen, der Upload war gescheitert.
Daher ist die Stelle auch noch auskommentiert, und ich belasse die
Transfer-Buffersize bei 512 Bytes.
Das funktioniert so sehr gut, evtl nicht ganz so schnell, da Hagens
erwähnte Richtungswechsel des USB-Comports (bei mir ein CP210x) das
ganze etwas abbremsen. Allerdings sieht man so auch mehr von der Upload
Prozentanzeige ;-)
Als Fallback gibt es daher noch die Kommandozeilenparameter "-xbf
FLASHTRANSFERBUFSIZE" und "-xbe EEPROMTRANSFERBUFSIZE" wenn 512
unpassend sein sollte.
Wie gesagt, ich weis nicht, warum es mit dem 16k-Buffer bei mir nicht
ging, aber mit 512 Bytes läuft der Upload immer erfolgreich.
NACHTRAG:
(kann man hier auch Attachnents nachbearbeiten?)
Gerade noch einen blöden Fehler gefunden, das da muss in der main() raus
das funktioniert noch nicht richtig:
>"Eingebaut" im doppeltem Sinne: zum einen als externe Datei>AVRootloader.dev, die im selben Dir wie die "exe" liegen muss, zum>Anderen noch als Fallback als einkompilierteListe (devlist.h)).
;) in meiner PC-Software besteht dieser Fallback darin das die Software
in der installierten Atmel AVR Studio Kopie alle Includes und Part
Descpription XML Dateien scant und autom. die AVRootloader.dev Datei neu
aufbaut.
Gruß hagen
Hallo Herr Hagen,
ich nutze den AVrootloader V1.6 mit eentsprechenden HEX auf einem
Atmega644P.
Direkt am PC ist das kein Problem.
Aber wenn ich über einen VSP (Virtual Serial Port = Serial auf IP
wandler mit HW-Group-Software) mit AVrootloader V1.6 flashen möchte,
dann bekomme ich nur einen Connect, gefolgt sofort von disconnect. Ich
kann aber wenn ich schnell genug bin bis zu ca. 4...5 mal connecten ,
mit gefolgten sofortigen
disconnecten. Die Information kann ich fast immer korrekt lesen mit
2-Wire ect...
Ich habe schonmal in der Programm Konfig alle Möglichen Parameter
versucht.
Da ich leider kein Programmierer bin bräuchte ich Hilfestellung wo da
Fehler liegen kann . Können sie mir weiter helfen ?
Mfg
M.Dittmann
Hallo zusammen,
ich nutze Hagens Bootloader mit Genuss und möchte an dieser Stelle noch
einmal für seine Arbeit danken. Derzeit ist er im Einsatz auf einer
kleinen Serie von Platinen mit einem ATMega88PA. Hier funktioniert
soweit alles wunderbar.
Leider sind bei der letzten Lieferung der µC einige Mega88-20AU dabei
gewesen und die bekomme ich leider einfach nicht zum laufen.
Hier mein Vorgehen:
1. Bootloader mit neuem Include "m88def.inc" kompiliert (Size: 554bytes)
2. Bootloader geflasht (Fuses: 512 words boot section boot reset vector
enabled)
3. Mit AVrootloader.exe mit dem µC verbunden. Das funktioniert auch
einwandfrei!
4. Hex-File (für den Mega88 kompiliert) auf den Proz geladen (über den
AVrootloader). Auch das funzt.
5. Das Programm startet und funktioniert auch einwandfrei. ABER: Ich
komme auf den Bootloader nicht mehr drauf! AVrootloader.exe gestartet
und ein PowerCycle am Board --> AVrootloader melde Device not found.
Über einen Tipp wäre ich sehr dankbar, da es mit den Mega88PA
einwandfrei funktioniert!
Beste Grüße,
Michael
steht der Resetvektor wirklich auf den Bootloader (geprueft?)
oder timing problem
hatte mal sowas aehnliches, als ich autobaud ausgeschaltet
hatte funktionierte es
vlG & viel erfolg
Charly
Hallo Charly,
vielen Dank für die schnelle Antwort. Resetvektor steht wirklich auf
Bootloader. Ist gecheckt.
Das timing könnte sein, aber das Programm gibt zyklisch per USART
(115200) Daten aus. Die kommen auch alle richtig an.
Ich probier mal das autobaud abzuschalten ...
Beste Grüße,
Michael
Hallo zusammen,
ich nutze in einem Projekt den AVRoutloader mit Verschlüsselung in der
Version 6 zusammen mit den ATMega1284P.
Funktioniert absolut zuverlässig und so möchte ich ihn in einem weiteren
Projekt einsetzen.
Da ich so in der Lage bin Firmware Updates auch auf Entfernung " *.acy"
Files zu versenden kann ich einzelne MCs auch mit unterschiedlichen
Passwörten versehen.
Nun kommt mein Problem:
für die Verschlüsselung brauche ich ja immer eine Verbindung zum MC mit
gleichem Passwort. Wenn ich aber mehrere Passwörter verwenden möchte
(jeder MC ein anderes) kann ich ja nicht für jeden verwendeten und
verschickten MC einen zweiten mit dem gleichen Passwort vorhalten oder
jedesmal den Bootloader auf einem MC nur für die Verschlüsselung neu
aufzuspielen.
Ich habe auch schon versucht mich in die Sourcen der Version 2 für
Delphi einzuarbeiten ...........leider fehlt mir da noch der endgültige
Durchblick da ich den Bootloader Version 2, in Verbindung mit dem
Windows Programm nicht zum Laufen bekomme.
Die Frage die sich mir stellt, kann ich überhaupt die Verschlüsselung
"ohne" Verbindung zum MC im Zielsystem realisieren, sieht das die
Software bzw. die AVRootloader.dll in der Version 2.0.0.0 134Kb vom
6.5.2008 vor.
Wenn es geht ???? !!!, vielleicht hat das schon ein User realisiert ????
oder kann was dazu sagen.
Eine Ja / Nein Aussage, vielleicht auch vom Entwickler wäre super.
Gruß
Schorschi
Damit hab ich den Hagen auch schon belaestigt, er hat es auf
der TO DO Liste
ich hab es im Moment so geloest das jede einheit eine ID hat
und dann kann ich die Soft fuer diese ID schreiben
vlG
Charly
Hallo Charly,
also mein Problem mit dem Loader ist gelöst. Es war ein Kabelbruch im
ISP Kabel (eine Leitung war hin). Nachdem dies identifiziert war lief
alles einwandfrei sowohl mit den 88ern und auch mit den 88PAs.
Vielen Dank nochmals für Deine Tips!
Beste Grüße,
Michael
Hallo Chraly,
erklär mal bitte wie du das meinst mit der ID je Einheit ??
Ich kenne jetzt nur die Eintragung des 128Bit Schlüssels im unteren
Bereich der Bootloader Software der mit dem brennen in dem AVR landet
und dem im AVRootloader hinterlegten Schlüsselvergleich (Eingabe per
Hand oder copy & paste im Eingabefenster) nach Betätigung des Compile
Button.
Nur so kann ich doch die ACY Datei herstellen !!!!
Geht das auch anders ????
Gruß
Schorschi
Hallo Zusammen.
Danke erstmal an Hagen für den Loader.
Ich habe mich nun durch den 5 Jahre Thread gequält und trotzdem noch
drei Punkte, deren Klärung ich mir durch dieses Posting, bzw. die
Antworten darauf erhoffe:
1. Watchdog
Ich springe von meiner App aus den Bootloader an mit:
1
wdt_enable(WDTO_15MS);
2
while(1);
wenn ich die Option
1
UseWDR = 1
aktiviere geht auch alles. Wenn aber nicht, habe ich folgendes Problem:
Bei einem ATmega328P bleigt der WDT aber aktiv und so resettet
sich der mega328P ständig.
Gut wäre, wenn der AVRootloader den WDT deaktivieren könnte, auch wenn
man den WDT im Bootloader selber nicht nutzen will.
Eventuell nur bei den Controllern, die den WDT nach einem Reset nicht
automatisch deaktivieren.
Wenn ich das selber patchen will: An welche stelle müsste ich den WDT
disablen?
2. Bluetooth
Gibt es jemanden, der den Bootloader hier mit so einem Bluetooth-Modul
HC-04 oder HC-05 erfolgreich einsetzt? Ich würde gerne wissen, ob das
Out-of-the-Box geht, oder was man ggf. beachten muss.
3. Unterschiedliche Baudraten
Ich möchte in der APP eine andere BAUD-Rate verwenden als im Bootloader.
Kann man dem AVRootloader.exe über die AVRootloader.ini auch
diesbezüglich unterschiedliche BAUD-Raten beibringen?
Hi Georg,
das mit der ID macht meine Soft, es liegt im EEPROM
eine ID. Diese wird beim Start der Soft geprueft und
wenn die passt startet die Anwendung
vlG
Charly
Erst mal auch von mir vielen Dank an Hagen für diesen super Bootloader,
den ich seit Jahren erfolgreich einsetze.
Aber nun möchte ich die PC-Seite für einen eigenen one-wire Bootloader
für die STM32F05x/F1xx Serie einsetzen. Das sollte doch mit einem
gefaktem AVR Eintrag im .dev File möglich sein oder? Funktionell wird
nur Flash write+verify benötigt.
Daher suche ich eine Beschreibung des Übertragungs Protokolls, hat da
jemand mal Aufzeichnungen gemacht?
Gruß Ingo
Hat jemand die letzte Version vom Bootloader mit einen ATmega1280 zum
laufen gebracht ?
Die erste Version funktioniert bei mir sauber und ohne Probleme.
Dagegen die Version 6.0 da bekomme ich keine Rückmeldung vom uC und kann
somit keine Verbindung aufbauen.
Viele Grüße
sascha
Hallo zusammen,
auch erstmal Dank an Hagen fuer den schicken Bootloader.
Ich selbst habe ihn in eignen Projekten noch nicht eingesetzt, hatte
aber kuerzlich das Problem ein Geraet, auf dem er sich befand,
aktualisieren zu wollen. Leider hatte ich gerade kein Windows zur Hand
und hab daher recherchiert, welche anderen Moeglichkeiten es gibt.
Dabei habe ich auf github den AVRFreeLoader gefunden, der aber noch
nicht soweit ist, dass er mir weitergeholfen haette:
https://github.com/prof7bit/AVRFreeLoader
Mit wine 1.6.2 auf debian jessie war ich dann aber, wie folgt,
erfolgreich:
In die Datei ~/.wine/system.reg muss man folgende Zeilen eintragen:
1
[Hardware\\Devicemap\\Serialcomm] 1231984861 @=""
2
"Serial0"="COM1"
3
"Serial1"="COM2"
4
"Serial2"="COM3"
5
"Serial3"="COM4"
6
"Serial4"="COM5"
7
"Serial5"="COM6"
8
"Serial6"="COM7"
9
"Serial7"="COM8"
10
"Serial8"="COM9"
Und dann noch den symbolischen link fuer com1 anlegen:
1
ln -s /dev/ttyUSB2 ~/.wine/dosdevices/com1
Man muss natuerlich /dev/ttyUSB2 durch den Port ersetzen, an dem
wirklich das Geraet haengt und im AVRootloader dann COM1 auswaehlen.
Vielleicht hilft es ja dem einen oder anderen.
Vielen Dank für den Tipp.
Hatte das auch schon mal mit Wine versucht, aber die
Schnittstellenautoerkennung ging nicht und es wurden keine
Schnittstellen angeeigt oder detektiert.
Die @... Zeile in der Form scheint es da zu bringen.
Bin halt eher ein Linux Mensch und mache nur extrem wenig wenig
Windoofs..
Hallo AVRootloader Fans & natürlich Hagen
Ich habe mich die letzten Tage durch den Thread gearbeitet um den
Bootlaoder, Verschlüsselung, etc. zu verstehen.
Nun bleiben mir beim Aufbau der ACY-Datei noch einige Fragen die ich mir
(noch) nicht erklären kann.
Beispielhaft habe ich einen Screenshot eines Dateiheaders im Hexeditor
angefügt. Folgendes denke ich erkannt zu haben:
0x00 - 0x0b Identifier "AVRootloader"
0x0c 0x06 Bootloader Version
0x0d 0x07 ???
0x0e - 0x14 App-version "0.2.0.3"
0x15 - 0x18 0x00 0x1e 0x93 0x0b = ATTiny85 Signature
0x19 0x0f Anzahl Pages
0x1a 0x06 ??? Wiederholung Bootloader Version
0x1b 0x00 ???
0x1c 0x25 ???
0x1d - ab hier Kommandos & Daten
Kann mir jemand bei den Fragezeichen auf die Sprünge helfen?
Gruß Jürgen
Jürgen schrieb:> Hallo AVRootloader Fans & natürlich Hagen>> Ich habe mich die letzten Tage durch den Thread gearbeitet um den> Bootlaoder, Verschlüsselung, etc. zu verstehen.> Nun bleiben mir beim Aufbau der ACY-Datei noch einige Fragen die ich mir> (noch) nicht erklären kann.> Beispielhaft habe ich einen Screenshot eines Dateiheaders im Hexeditor> angefügt. Folgendes denke ich erkannt zu haben:>> 0x00 - 0x0b Identifier "AVRootloader"> 0x0c 0x06 Bootloader Version> 0x0d 0x07 ???> 0x0e - 0x14 App-version "0.2.0.3"> 0x15 - 0x18 0x00 0x1e 0x93 0x0b = ATTiny85 Signature> 0x19 0x0f Anzahl Pages> 0x1a 0x06 ??? Wiederholung Bootloader Version> 0x1b 0x00 ???> 0x1c 0x25 ???> 0x1d - ab hier Kommandos & Daten>> Kann mir jemand bei den Fragezeichen auf die Sprünge helfen?>> Gruß Jürgen
0x0d 0x07 ???
0x0e - 0x14 App-version "0.2.0.3"
das Byte vor dem String ist die String-Länge in guter alter
Pascal-Manier.
0x1a 0x06
Ja, das ist in der Tat die Bootloader Version
0x1b 0x00 ???
0x1c 0x25 ???
Das ist eine 16 bit breite Flag variable (WORD, big endian!):
$0001 Flashdaten sind verschlüsselt
$0002 EEPROM-Daten sind verschlüsselt
$0004 Flash soll geschrieben werden
$0008 EEPROM soll geschrieben werden
$0010 Flash soll verifiziert werden
$0020 Flash soll (vorher?) gelöscht werden
$0040 EEPROM soll komplett geschrieben werden
Aber nagel mich nicht drauf fest, alles ohne Gewähr.
Die AVRootloader.exe mißbrauche ich für einen STM32F05x STRootloader.
Den habe ich geschrieben, weil ich eine serielle one-wire Lösung haben
wollte. Wenn er fertig ist, werde ich ihn hier auch vorstellen.
Im Moment meldet sich der STM32 als ein ATMega16/32/64, was auch
funktioniert.
In der AVRootLoader.dev lassen sich aber auch neue ID's eintragen, in
denen man besser auf den STM32 zugeschnittene Parameter eintragen
könnte.
Kennt jemand die Bedeutung der Spalten BZ1,BZ2,BZ3,BZ4?
Was diese Parameter bedeuten ist mir noch nicht klar.
Gruß Ingo
Ingo Stahl schrieb:> Kennt jemand die Bedeutung der Spalten BZ1,BZ2,BZ3,BZ4?> Was diese Parameter bedeuten ist mir noch nicht klar.
Das (die ganze Tabelle) ist aus den orginal Atmel PartDescriptionFiles
xml Dateien rausgeparst. Diese 4 besagten Einträge entsprechen den
Einträgen von:
MEMORY/BOOT_CONFIG/BOOTSZMODE1/PAGES
MEMORY/BOOT_CONFIG/BOOTSZMODE2/PAGES
MEMORY/BOOT_CONFIG/BOOTSZMODE3/PAGES
MEMORY/BOOT_CONFIG/BOOTSZMODE4/PAGES
Ingo Stahl schrieb:> für einen STM32F05x STRootloader.> Den habe ich geschrieben, weil ich eine serielle one-wire Lösung haben> wollte.
Das ist sehr begrüßenswert! Ich bin auch schon auf der Suche nach einem
adäquaten Ersatz. Den guten alten AVRootloader in die ARM-Welt
hinüberzuretten wäre sehr begrüßenswert bevor er mangels Aufmerksamkeit
vollends stirbt, auch eine Version für die NXP-ARMs wäre nicht schlecht.
Ich hoffe Deine Version wird quelloffen und frei sein?
Das würde mich auch motivieren wieder etwas Energie für meine
mittlerweile eingeschlafene unvollendete freie (und cross-plattform)
Re-Implementierung eines AVRootloader.exe Klons zu stecken.
Ingo Stahl schrieb:> Danke für die Info.> Das dient wohl nur zum Überprüfen der Anzahl BootPages, die der Target> zurück meldet.
Genau. So wie ich das momentan überblicken kann wird damit nichts
anderes getan als zu detektieren ob der betreffende AVR eine
Bootloader-Sektion hat und ob die Größe die das Target meldet plausibel
ist.
Hallo Zusammen,
hat jemand Erfahrungen mit dem Bootloader von Hagen und Atmel Studio
6.2.
Bekomme da immer folgenden Fehler beim Komilelieren:
-Relative branch out of reach
Hoff mir kann jemand weiterhelfen.
Hallo Florian,
das Problem hatte ich vor längere Zeit beim Wchsel auf AVRStudio 6 auch.
Wenn ich mich recht erinnere habe ich in AVRootloader.inc die Zeile 288
von:
Hallo,
erstmal danke für den tollen Bootloader. Habe ihn an einem Mega328P im
1-wire Modus benutzt. Kompiliert mit Atmel Studio 6.1. Funktioniert an
5V einwandfrei. Allerdings läuft mein AVR im finalen Board nur bei 3,3V
weil ich Peripherie dran habe, welche nicht mehr als 3,3V verträgt. Bei
der geringeren Spannung kann ich dann aber keine Verbindung mehr über
den Bootloader herstellen. Nutze einen echten COM Port.
Als Adapter habe ich schon ausprobiert:
2,7k und 2xBAT85
1k und 2xBAT85
10k und 2xBAT85
2,7k und 2xSB120
1k und 2xSB120
10k und 2xSB120
auch mal noch zusätzlich eine 3,3V Zener gegen GND. Hat aber auch nichts
gebracht.
Hat jemand eine Idee wie es gehen könnte? Wie schon erwähnt mit 5V gehts
immer.
Danke schonmal.
Matthias
Kann mir bitte mal jemand eine unverschlüsselte und veschlüsselte .acy
Datei einstellen? Der Inhalt ist vollkommen egal und den Schlüssel
benötige ich natürlich auch nicht. Der gewählte Bufferspeicher sollte
allerdings kleiner als die Flashgröße sein, damit die Datei in mehreren
Blöcken übertragen wird. Der Hintergrund ist folgender. Die
verschlüsselte Übertragung gefällt mir und ich möchte einen Bootloader
für PIC schreiben. Dazu würde ich gern den Aufbau des .acy Fileformats
besser verstehen. Leider habe ich selber kein Equipment für AVR um es
mal kurz auszuprobieren.
Das einzige was ich dazu finden kann steht unter
Beitrag "Re: AVR-Bootloader mit Verschlüsselung".
Hier sieht man das ab Position $1B das Initialisierungs-Paket $FEFE
beginnt. Kann ich davon ausgehen, das danach die einzelnen
Flash-Daten-Pakete, welche bei Verschlüsselung mit $FEFF beginnen,
hintereinander ohne Trennzeichen in der Datei stehen? Und stehen die
Anweisungen zum Flashen $0101 auch in der .acy Datei, oder werden diese,
nach senden einer Page und Bestätigen durch MC, von der PC-Software
generiert?
Welche Antworten erwartet die PC-Software vom zu flashenden MC nach der
Übertragung der Daten?
Hier
Beitrag "Re: AVR-Bootloader mit Verschlüsselung"
siehr man schön, das bei OK ein $30 übertragen wird. Aber was ist, wenn
ein Fehler auftritt?
Viele Grüße und schon mal Danke,
Steffen
Steffen N. schrieb:> Aber was ist, wenn> ein Fehler auftritt?
Dann bricht es leider ab. Der code (das ganze Protokoll) sollte
dahingehend verbessert werden daß Übertragungsfehler durch automatisches
Halbieren der Blockgröße und Neuübertragen abgefangen werden.
Danke Bernd.
Das er abbricht, war mir ja eigentlich fast klar. Aber wie gibt der AVR
kund, das was nicht stimmt? Antwortet er einfach nicht und es gibt einen
Timeout, oder gibt es einen speziellen Befehlscode? Fragen über
Fragen...
> Dann bricht es leider ab. Der code (das ganze Protokoll) sollte> dahingehend verbessert werden daß Übertragungsfehler durch automatisches> Halbieren der Blockgröße und Neuübertragen abgefangen werden.
Also das stell ich mir mit den veschlüsselten Daten im .acy sehr schwer
vor. Die Adresse der Daten steht ja verschlüsselt am Ende jeden Blockes.
Wenn ich die Blockgröße OnTheFly verändern will, muß der PC-Bootloader
die darin enthaltenen Daten mit der Adresse in Echtzeit wieder neu
verschlüsseln, wozu er auch Kenntnis vom Schlüssel haben müßte. Das
würde die Sache in meinen Augen extrem anfällig gegen Angriffe machen.
Ich könnte mir vorstellen, die Blockgröße von vorn herein auf ein
erträgliches Maß, wie eine Flash-Page, zu reduzieren. Das würde zwar die
Übertragung langsamer machen, aber man könnte fehlerhafte Blöcke
einfacher wiederholen. Dazu würde man das Feedback Register der XTEA
Entschlüsselung im MC vor jeden neuen Block zwischenspeichern und bei
einer Blockwiederholung auf diesen alten Wert zurück setzen.
Hallo,
ich würde gerne nur bei der TX Leitung den Pegel invertieren.
Weiß jemand, ob das problemlos änderbar ist ohne die 512kB Grenze zu
sprengen?
Kann mir jemand bezüglich der nötigen Änderung auf die Sprünge helfen?
Vielen Dank, Simon
Hallo in die Runde,
Es wurden ja hier schon einige Fehlersituationen bei der Verwendung des
AVRootloaders diskutiert und dank Hagens und Eurer tatkräftigen Hilfe
auch oft gelöst. Nachdem ich nach Studium des kompletten Thread und der
Nachbarthreads meine auftretende Fehlermeldung nicht finden konnte,
möchte ich um Tipps für mein Problem bitten...
Ich habe den AVRootloader per 1-wire an einem attiny85 zum Flashen der
Betriebssoftware eines Lokdecoders (Modellbahn) an einer herkömmlichen
seriellen Schnittstelle (9pol.) im Einsatz. Die Verbindung zum Win98SE
Rechner mittels Avrootloader.exe klappt stabil. Microcontoller Infos
werden problemlos ausgelesen und verstanden. Will ich aber flashen,
Eeprom löschen, lesen oder schreiben, oder sonst den Inhalt des Chips
manipulieren, bricht der Vorgang mit der Meldung "Overlapped I/O event
object not in signaled state: win32 error 996".
Ich habe schon herumgespielt:
-alle timeouts in alle Richtungen verändert
-Den Com Port mit anderem Handshake und Buffer Einstellungen in der
Systemsteuerung versehen
- andere Widerstände in die tx-Leitung
- andere Stromversorgung des MC
- alle Avrootloader Versionen von 3 bis 6 ausprobiert
- den MC zu unterschiedlichen Phasen des Verbindungsvorgangs
eingeschalten.
Es hat alles keine merkliche Veränderung ergeben, und ich nage bereits
an der Tischkante. Hat noch jemand hier eine Idee, auf welchem Schlauch
ich wohl stehe?
Danke für die freundliche Beachtung meiner Frage und Gruss,
Thomas.
Guten Morgen Julinho und Charly,
Das werd ich mal testen, alle anderen Rechner bei mir hatten bloss kein
RS232. Jetzt muss erstmal ein Adapter zu Usb her, oder der alte Rechner
kriegt Vista aufgespielt (bei Win7 macht er wahrscheinlich die
Grätsche).
Danke, Thomas.
Hallo,
Kurze Rückmeldung von mir! Ich habe auf besagtem betagten Rechner WinXP
aufgespielt, da mir Vista zu suspekt war. Was soll ich sagen, der
Avrootloader funktioniert tadellos, als wäre es nie anders gewesen!
Daher: vielen lieben Dank nochmals für die Anregung :-) .
Allseits schönes Wochenende,
Gruß Thomas
Hallo an alle AVRootloader-Kundigen,
nachdem das Thema AVRootloader und ATMega2560 bei mir längere Zeit
liegen geblieben ist, steht es nun wieder auf der Tagesordnung. Da die
vorhandene Hardware böderweise so designt ist, dass der Bootloader über
den Port H des ATMega2560 angesprochen werden muss, habe ich erstmal den
Code auf Portadressen über 0xff angepasst und die damit verbundene
Änderung des Timings in der AVRootloader.asm vorgenommen.
Für die ersten Versuche habe ich auf Verschlüsselung verzichtet, also in
der AVRootloader.ini Passwort auf blank gesetzt.
Der AVRootloader ist in den ATMega2560 geflasht und die Fuses sind
entsprechend gesetzt (siehe Anhang).
Über die LockBits sind keinerlei Einschränkungen programmiert.
Nach dem Start der AVRootloader.exe kann ich mich mit dem ATMega2560
verbinden und die Device-Informationen auslesen, auch das Auslesen aus
dem SRAM und dem EEPROM funktioniert. Damit sollten doch die
grundlegenden Funktionen in Ordnung sein.
Leider funktioniert das Schreiben nicht. Beim Versuch, den EEPROM mit
einem geänderten Byte zu beschreiben, gibt es den Fehler:
Cmd.WriteEeprom.ReadByte() ICOM: read error
mit anschließendem
Device disconnected.
In der AVRootloader.ini ist
Buffer = 1
Base = 100
gesetzt.
Beim Ändern eines Bytes des SRAM-Bereichs führt das Schreiben zwar nicht
zum Abbruch, wird aber auch nicht ausgeführt; der ursprüngliche Wert
wird beim nächsten Read wieder angezeigt.
Kann mir da bitte jemand weiterhelfen?
Thomas
Hallo und guten Tag,
nach längerer Abwesenheit wollte ich mal fragen ob an dem AVRootloader
weiter gearbeitet wurde oder ob jemand das Projekt weiter geführt hat.
Speziell interessiert mich die Möglichkeit der Verschlüsselung
(Herstellung des ACY File) ohne das der Zielmicrocontroller eine
Verbindung zur Windows Software hat.
Danke Euch.... eine echte Supper Software die mich bis heute begleitet
und noch nie im Stich gelassen hat.
Hallo Wilhelm,
ich benutze den AVRootloader 6.0 für eine Anwendung in die auch für
Grundeinstellungen das EEprom eingebunden ist. Wenn die ACY Datei und
die eep über den AVRootloader aufgespielt sind ist die Anwendung quasi
in der Grundeinstellung.
1. Schritt
Andere Parameter in der Grundeinstellung einstellen.
So benutze ich den AVRootloader, stelle connect zum AVR (ATMega1248p)
her und lese das unverschlüsselte EEprom aus, speichere es auf dem
Rechner zwischen.
2.Schritt
Mit einer auf Delphi geschriebenen separaten Software verändere ich die
einzelnen Byte in der Eprom Datei. Die Änderung wird visualisiert und
ist so besser und übersichtlicher einstellbar.
Siehe Anhang Software.... in der untersten Zeile siehst du was durch die
Visualisierung geändert wird (nur wenn das Dummy File im gleichen
Verzeichnis ist). Quasi in der ersten/zweiten Zeile des EEpromspeichers.
Danach wird das veränderte EEProm File auf dem Rechner zwischen
gespeichert.
3. Schritt
ich rufe abermals den AVRootloader auf, connectier und spiele das neue
EEprom File auf.
Diesen Ablauf: Auslesen der EEpromdatei, verändern und wieder aufspielen
möchte ich gerne in einer Software erledigen. Die Verschlüsselung des
EEpromfiles wäre geil aber nicht unbedingt notwendig.
Richtig gut würde es wenn die Software nur mit dem passenden zuvor
eingestellten AVR mit dem Schlüssel funktioniert. Der Schritt käme aber
erst als zweites
DANKE !
Hallo und guten Morgen zusammen,
ich arbeite mit einem ATMega1284p -> USB Seriell FT232 -> Win7 Notebook.
Die Programmierung mit der AVRootloader Software funktioniert ebenfalls
mit einem ATTiny44 und Attiny45 tadellos so richtig klasse. Sowohl mit
externem und internem Takt.
Da ich wie im letzten Post geschrieben zwei Softwaren mit einander
verbinden will habe ich mir in den letzten 4 Tagen die Delphi
Testsoftware aus dem Beispiel des AVRootloaders 6 vorgenommen um mich in
die Sourcen einzuarbeiten.
In diesen 4 Tagen habe ich Stunde um Stunde mit der Delphi Testsoftware
für die Anbindung eines AVR an den PC verbracht. Der Verbindungsversuch
wird in dem Memofeld dargestellt.
Ich kann auch erkennen das der PC zunächst ein paar Einstellungswerte
sendet und dann zwei sich wiederholende Zeichenketten sendet.
Zeile 1: FF FF FF und so weiter und in der zweiten Zeile sendet er unter
anderen nach den FF FF den BootMSG "Bootloader"..... bis die Software
nach zig versuchen abbricht.
Screenshot folgt....
Nur scheint der AVR nicht zu antworten.
Hat einer Erfahrungen mit der Testsoftware oder kann mir einen Tipp
geben ? ob wohl das Thema uralt ist
Ich werde mal weiter forschen und schauen ob die Baudraten zueinander
passen, obwohl sie identisch eingestellt sind.
Ok.... danke für die Mühe
Hi,
hat jemand den Bootloader auf dem mega1284p mit 1wire am laufen?,
habe ihn schon auf diversen anderen Type schon am laufe, aber
der m1284p will nicht.
Konfigutation: 1wire an portb.3, m1284p-mu mit 20Mhz, Baud fix
19200
hab mit dem oszi geschaut, die v24 seite zappelt, vom mega
kommt nix.
ein testprg das den pb.3 zappeln laesst funktioniert auch.
clk/8 ist auch deaktiviert.
vlG
Charly
wie's aussieht liest ja hier keiner mehr mit............... ;(
falls sich doch jemand mal hierher verirrt hab i folgendes gemacht:
hauptproblem war der usb-ser wandler mit CH340 (und/oder sein Treiber)
auch musste i UseUartInvert = 1 setzen obwohl kein max232 o.ae.
dazwischen sitzt .........., dann konnt i zwar mit dem CH340 eine
Verbindung aufbauen, auch EEprom lesen ging anscheinend aber weder EE
noch Flash konnten beschrieben werden......
dann hab i den CH340 wandler gegen einen mit PL2303 getauscht und schon
war ein schreiben des EE und Flash moeglich, dann hatte ich autobaud
eingeschaltet und es funktioniert auch mit versch. Baudraten.
Mit dem Oszi* beobachtet sehen die Signale des PL2303 steiler aus,
haben aber bei high einen ca 1V grossen rippel drauf mit ca. 250khz
das ist beim CH340 nicht da sehen die Signale aber 'schlapper' aus....
* Oszi ist nur ein HDS2062M ist also nicht so super von der Aufloesung
ps. ich meine ich haette frueher schon mit dem CH340 erfolgreich
geflasht......
vlG
Charly
Hallo Charly, na klar lese ich noch mit.
ich möchte immer noch die AVRootloader.dll in eine eigene Anwendung
einbinden und bekomme da die Verbindung zum AVR nicht auf die Kette. Die
Demo Delphi Anwendung die dabei ist stellt bei mir keine Verbindung zum
AVR her.
Also wenn ich etwas helfen kann immer gerne.
Ich habe einen.... mehrere ATMega1284P mit 18,432 MHz (zusammen mit zwei
MCP 2515) aber in 2 Wire laufen.
Die Verbindung läuft allerdings über den Rx0 und Tx0 an PD0 und PD1.
Mein USB RS232 Wandler ist auch ein FDTI RL232. Die Baudrate habe ich
fest auf 38400 eingestellt und die UseUartInvert = 1 steht wie bei dir.
Die Schnittstelle benutze ich sonst nur für Debug Ausgaben.
Eingestellt habe ich Flash verschlüsselt und Eprom ohne. Wenn du dir das
Programm weiter oben anschaust weißt du warum. Wenn du den Code vom
AVRootloader sehen möchtest kopiere ich dir den gerne hier ein oder die
ganze Codedatei.
Läuft soweit alles einwandfrei. Win 7 x64
Wenn ich am Wochenende dazu komme probiere ich auch gerne mal deine
Konfiguration.
Jetzt kommt das aber. In der Doku zum AVRootloader steht wie man den RTS
Pin für den Reset des AVR benutzen kann und wie man ihn einstellt. So
habe ich mir zu den Breakout usb rs232 (weil einfach schön klein und
passt wunderbar Huckepack auf den AVR) noch einen anderen gekauft der
diesen RTS Pin besitzt. Leider funktioniert der RTS Pin wie der DTR Pin
an den Breakout... also bei öffnen der Schnittstelle wird der Pin auf
Masse gezogen und Ende...... sehr unzufrieden, den Dauerreset braucht
kein Mensch.
Eigentlich möchte ich nur die Bedienung des AVRootloader möglichst
einfach für den Endanwender gestallten.
Das Programm (weiter oben) habe ich mitlerweile so erweitert das ich aus
meinem Programm den AVRootloader mit Parametern aufrufe und so ohne
große Umstände das Eprom File in den AVR bekomme. Das funktioniert auch
echt 1A, nur den Rest bekam ich, so wie beschrieben, zunächst nicht hin.
So habe ich mir mit einem zusätzlichen kleinen ATTiny aus dem DTR Signal
des Breakout einen Restbaustein gebastelt. Etwas Aufwand aber besser so
als einen teuren USB RS232 Wandler zu nutzen an dem der RTS auch nicht
geht.
Georg schrieb:>............> Jetzt kommt das aber. In der Doku zum AVRootloader steht wie man den RTS> Pin für den Reset des AVR benutzen kann und wie man ihn einstellt. So> habe ich mir zu den Breakout usb rs232 (weil einfach schön klein und> passt wunderbar Huckepack auf den AVR) noch einen anderen gekauft der> diesen RTS Pin besitzt. Leider funktioniert der RTS Pin wie der DTR Pin> an den Breakout... also bei öffnen der Schnittstelle wird der Pin auf> Masse gezogen und Ende...... sehr unzufrieden, den Dauerreset braucht> kein Mensch.
ich hatte vor Jahren (ca. am anfang der Veroeffentlichung) schon den BL
mit Wire und Reset im Betrieb also 3 Leitungen und das hat bestens
funktioniert, zu RTS hatte i ein C in reihe, 220nF wenn i mich richtig
erriner, wenn's dich interessiert kann i mal schauen ob i noch was an
Unterlagen habe. Am AVR waren meines wissens am Reset 10k nach VCC mit
paraleller Diode und 100nF nach GND, hoffe i hab mich verstaendlich
genug ausgedrueckt. I meine i haette 'damals' sogar eine kleine Platine
als Huke-Pack f. den USB-Ser Wandler fertigen lassen, wenn du magst
kannste mir auch deine email per PN schicken wenn i da noch was fine
mail i es dir
vlG
nachtrag:
Beitrag "Re: AVR-Bootloader mit Verschlüsselung"
Hallo Charly,
jawoll das interessiert mich sogar brennend.
Ich melde mich mal an. (schorschi)
Ja, hast dich verständlich ausgedrückt, ich hatte es mal mit der Arduino
Variante versucht, aber beim Arduino haben die wohl nicht den 10K
(Reset-VCC). Scheinbar geht es deshalb beim Arduino. Ich werde aber auf
den 10K an der Position und dem 100nf Ceramik zur Entstörung nicht
verzichten.
Bin gespannt auf deine Schaltung.
LG
Hallo zusammen,
ich nutze den Avrootloader nun schon einige Jahre für meine ATTiny 85
Projekte. Für meine aktuellen Basteleien möchte ich einen der "neuen"
Tinys (Series 1), den ATTINY1614, nutzen. Hat schon mal jemand probiert
den Avrootloader entsprechend anzupassen (kein SPM sondern NVMCONTROLLER
) oder evtl. nach C zu portieren?
Gruß Schorsch
Hallo Pluggie,
ja, der ATTiny1614 hat UPDI, aber ich nutze die verschiedenen
Möglichkeiten die mir der AVRootloader im Frontend bietet:
Versionierung, Verschlüsselung, Editieren des EEProm.
Gruß Schorsch
Hallo Forum, hallo Leute
Immer wenn ich hier was schreibe, dann hackt es mit etwas.
Jetzt muss ich doch leider diese alt Kamelle aus der Versenkung holen.
Da der Bootlader mir schon öfters ein paar Drähte gespart hat, wie auch
hier.
Frage:
Hat es schon mal jemand geschafft einen Tiny1634 zu Programmieren?
Es funktioniert bis zum Programmieren alles tadellos.
Nur jetzt bleib ich an den ">Error: Can not find RJMP to Main" hängen.
Seltsamerweise gibt es nur mit den 1634 Ärger, alle anderen Tiny's
funktionieren TOP.
Ich hab schon alles mögliche probiert Bascom (net meckern) den
Lösungsvorschlag
.org 0
rjmp Main
Main:
beizubringen, aber die Fehlermeldung bleibt hartnäckig.
Wäre für einen kleinen 'Anstubser' sehr glücklich.
Danke schön
Beste Grüße
Ronnie
zitiere mal eine alten Beitrag siehe oben:
"Das Problem ist, dass bei Tinys mit 16kByte Flash nicht jede Adresse
mit
RJMP erreichbar ist. Deswegen benutzt der Compiler wahrscheinlich den
JMP-Befehl.
Entweder man erzwingt durch Inline-Assembler einen RJMP, oder Hagen muß
das PC-Programm modifizieren."
Danke euch schon mal.
Gerd H. schrieb:> Hallo Ronald,>> vielleicht ist ja das Programm für Dich hilfreich.>> http://www.jtxp.org/tech/onewayloader.htm>> Mfg> Gerd
Gerd,
eigentlich bin ich ja mit Hagen's Bootlader total zufrieden und weis
auch wie ich alles zum funktionieren bekomm, aber ich werde mir die
Lektüre mal reinziehen.
Julian B. schrieb:> zitiere mal eine alten Beitrag siehe oben:>> "Das Problem ist, dass bei Tinys mit 16kByte Flash nicht jede Adresse> mit> RJMP erreichbar ist. Deswegen benutzt der Compiler wahrscheinlich den> JMP-Befehl.> Entweder man erzwingt durch Inline-Assembler einen RJMP, oder Hagen muß> das PC-Programm modifizieren."
Julian,
Opps, den alten Beitrag hab ich wohl übersehen..
Hab ich ja schon damit herum probiert, wird aber scheinbar nix.
Naja, ich glaub nicht das Hagen nur weil der 1634 nicht geht, an dem
Programm noch was ändert.
Funktioniert ja TOP
Werde alles auf einen 328 umbauen, da hab ich noch ein paar im MU
Gehäuse.
Sind zwar total überdimensioniert und auch leicht größer als die 1634 im
MU
Aber da ist dann auch noch Luft nach oben und ein paar pin's mehr :))
Seit mir gegrüßt, bist zum nächsten Problemchen.
Ronnie
Hallo,
also ich hab mir den OWL mal angesehen.
Da zieh ich aber den Hagen seinen wegen der Progammieroberfläche vor.
Außerdem hab ich 2std damit herum probiert, mit 0 Erfolg.
Das generieren des Bootladers funktioniert.
Auch das speichern in den target scheint zu klappen (da sitzt was fein
am ende vom target)
Fuses gesetzt, es wird auch etwas Richtung target geschickt, wird aber
nicht
gespeichert.
Das target bleibt leer (der Bootlader ist aber weiterhin vorhanden und
nicht überschrieben)
Nicht schön finde ich das Programmiert wird, obwohl kein target
angeschlossen ist.
Sei's wies sei, Kommandozeilen hin oder her, ist mir zu umständlich.
Hier sei auf den 2. Satz verwiesen.
Grüßle
Ronnie
Hallo Ronald,
schade das es nicht so gut geklappt hat.
Hier" http://cvieth.bplaced.net/elektronik_atmel_bootloader.html ",
hat Christian alles mal zusammengefasst, und wenn mann höflich anfragt,
bekommt man eine gute Windows-Gui.
Mfg Gerd
NA, HOPPERLA.. OHOH
Nach der tollen Erklärung von Christian, bin ich vielleicht auf meinen
Problem gestoßen.
Firmware kodieren
owl.exe --targetname=owl_loader_m168pb_d0.hex --flashfile=Test_1.hex
--transfile=Test_1.hex
CHECK!
Kodierte Firmware übertragen
owl.exe --transfile=Test_1_owl_loader_m168pb_d0.owl --serialport=COM8
--baud=9600
CHECK!
Fehler 1, ich hab die Endung .owl nicht angegeben, wobei ich meinen das
es die nicht braucht.
ABER! Das Haupding könnte USB Adapter sein, wie Christian auch seine
Fehlversuche beschrieben hat.
Werde Morgen nochmal rangehen und mit einen FTDI Basierten Wandler
ausprobieren. Ist alles schlüssig, große Datei die den Tiny fast
vollpackt.
gut's Nächtla
Ronnie
Von wegen 'Gut's Nächtla' ;)
Das hat mir jetzt keine Ruhe gelassen und JA! es funktioniert! JUHU
Es war tatsächlich an dem USB Adapter gelegen!
Hatte mit dem Teil und dem Lader von Hagen nie Probleme.
Aber mit dem FTDI Chip funktionierte es beim ersten Versuch.
Ich glaub ich kann mich mit dem Teil doch noch anfreunden!
Wobei ich eine Funktion schmerzlich vermisse und zwar das EP zu lesen.
Da steht bei mir immer eine Version Nr. drin damit es keine
Verwechslungen gibt. Hatte da schon die wildesten Erfahrungen mit falsch
geflashten Files.
Später werd ich mir ein schönes Glas Honig besorgen und den Christian
mal Kontaktieren. :))
Jetzt aber
'Gut's Nächtla'
Ronnie
Hallo Ronald,
bei mir hat auch die Übertragung des Programmes mit einfachen
RS232/PC817 und mit PL2303/PC817 funktioniert.
Bei der Verwendung von Seriennummer/Zuordnungen, Zitat:
" http://www.jtxp.org/tech/onewayloader.htm ==>>
Die Verwendung von Krypto bringt neben dem Schutz der Daten vor
neugierigen Blicken und der zuverlässigen Erkennung von
Übertragungsfehlern noch weitere
Vorteile: Starke kryptografische Schlüssel werden nach dem
Zufallsprinzip erzeugt. Auf diese Weise bekommt jeder Krypto-Bootloader
schon bei "Geburt" eine
einzigartige Geräteadresse (im Sinne einer UUID) zugeteilt, und wir
müssen uns später nie wieder mit Passwort-Phantasie-Problemen und
möglichen Kollisionen
herumschlagen."
MfG
Gerd
Gerd,
irgendwie werde ich mit dem Teil nicht wirklich warm.
Irgendwas mach ich falsch.
Ein Bootlader steht für mich jetzt einmal im Controller (for ever).
So, dann flash ich mein Programm, gut geht läuft.
Jetzt mach ich eine Änderung im Programm benenne es so wie das vorherige
aber Pustekuchen, es wird zwar was übertragen (LED am FTDI und owl zählt
auch schön hoch, leider bleibt immer das allererste übertragene
bestehen.
Der überschreibt den Flash nicht. Auch der Parameter --flasherase bringt
nix.
Es macht mich einfach nervös, wenn ich mich nicht auf Sachen verlassen
kann, zumal man nicht mehr an den Controller rankommt weil er vergossen
ist.
Ronnie
PS: NixSchwabe (Gast) Du bist auch so ein seltsamer Vogel den die Welt
nicht braucht!
Wem glaubst interessiert dein stumpfsinnige Meinung!
Hallo Ronald,
es muss natürlich 100% passen.
Hast Du Christian mal nach der Win-GUI gefragt?
Probiere mal das Beispiel aus der Schnellstart-Anleitung mit
verschiedenen Blink-Frequenzen und vielleicht einer Batch-Datei.
MfG
Gerd
SO!,
jetzt hab ich meinen Weg gefunden.
Alles funktioniert bestens, jetzt!
Mein Hauptfehler war das ich den Reset zu früh gedrückt hab, da war der
Timeout vom Bootlader schon durch bis das senden losging.
Eine Fehlermeldung kann es ja in dem Fall nicht geben.
Die GUI vom Christian habe ich bekommen, Danke noch mal an dieser
Stelle.
Da ich auch EEProm schreibe, hab ich mir die Zeilen für die Konsole als
REM in den Programmcode Kopiert COPY & PASTE fertig.
Ich werde aber dem Loader vom Hagen treu bleiben, ist einfach
Komfortabler.
Dank nochmal an alle Beteiligten.
Auch an den seltsamen Vogel, obwohl ich garnet aus der Ecke komme. :)
Grüssle (NA!)
Ronnie

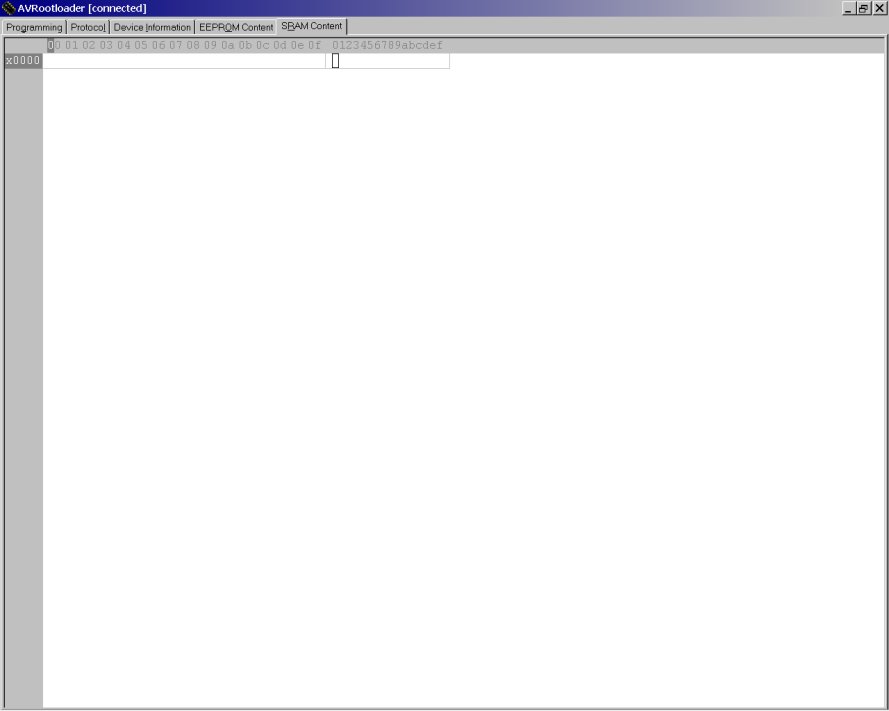
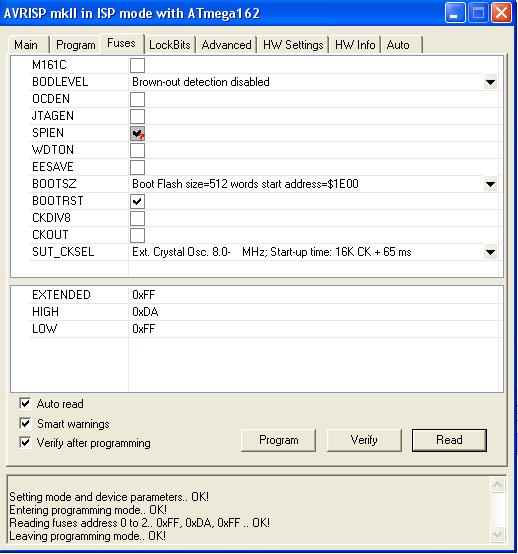

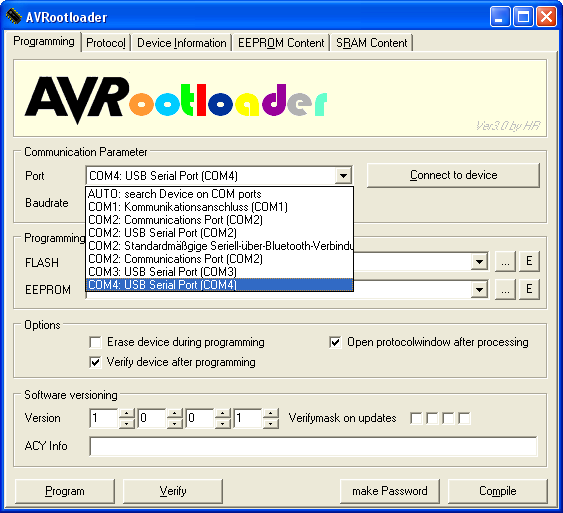

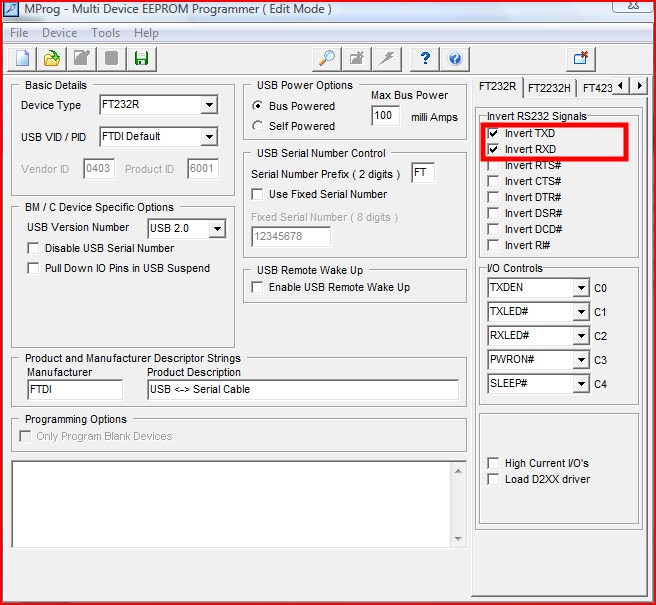

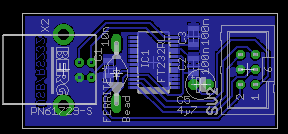

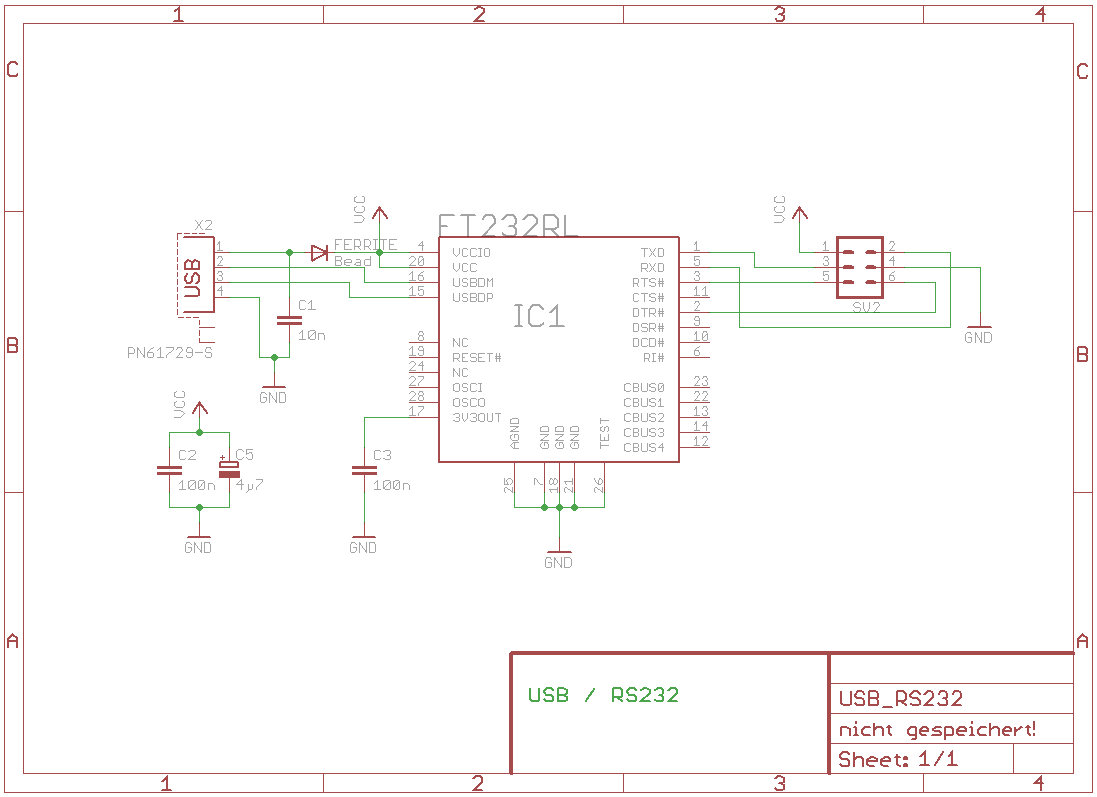

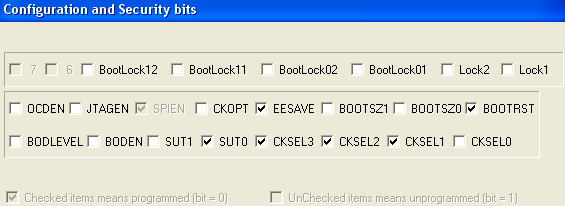

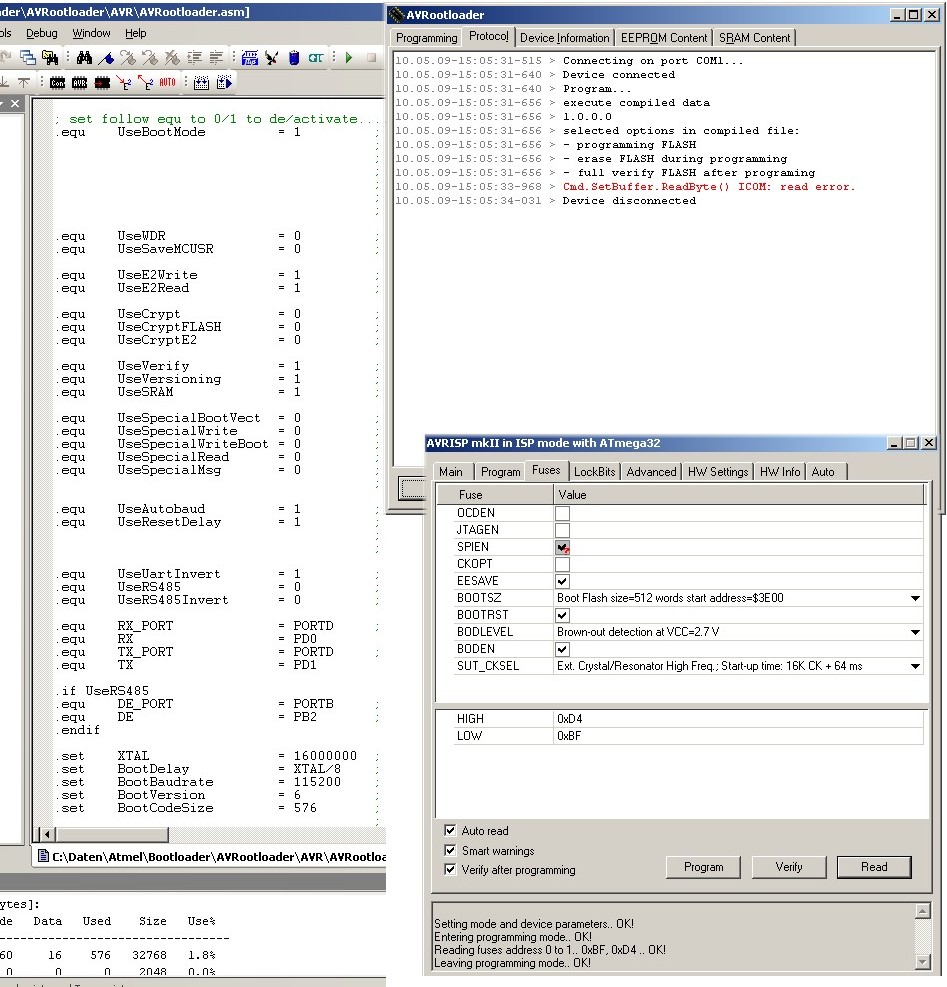

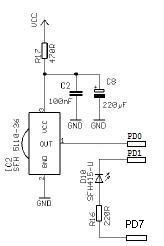

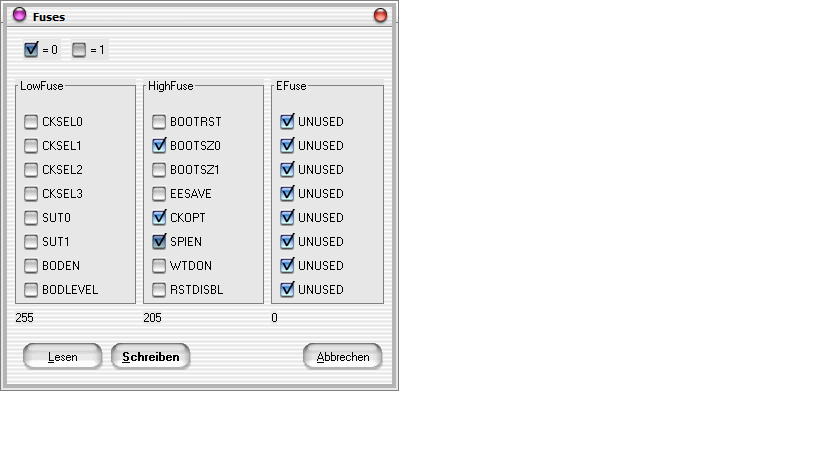






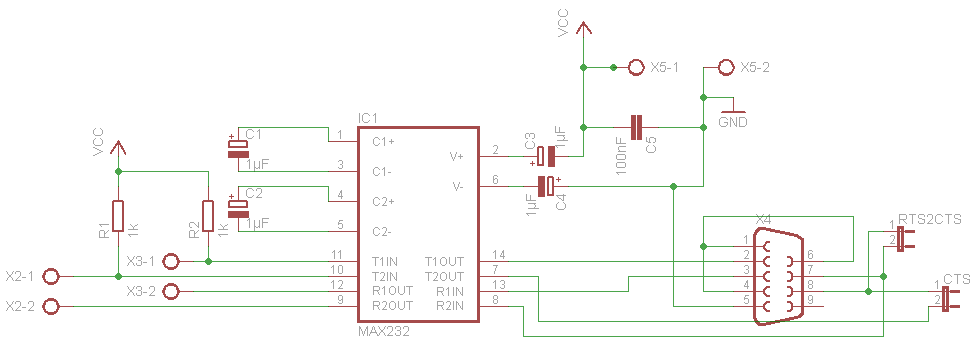
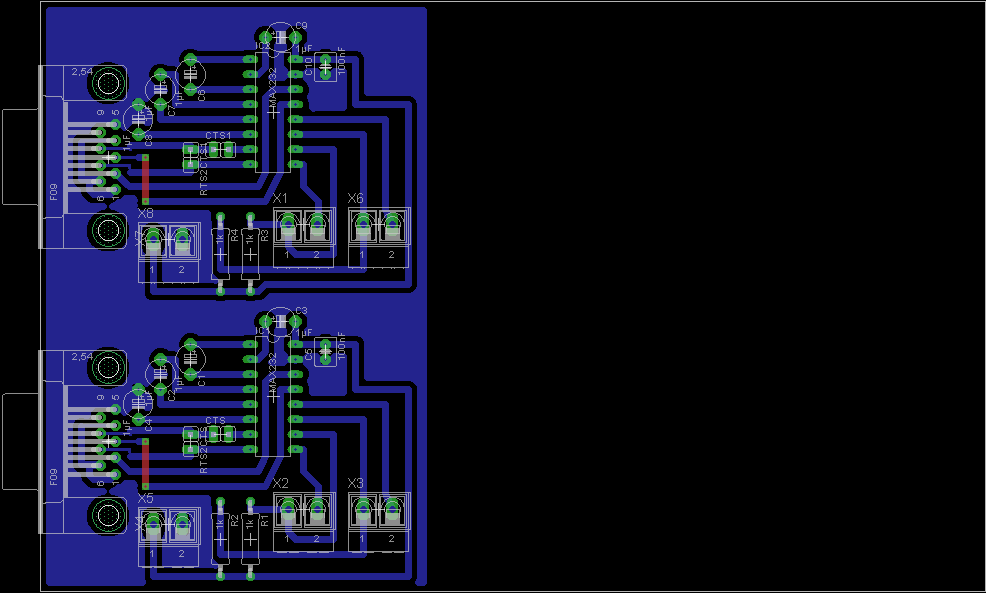

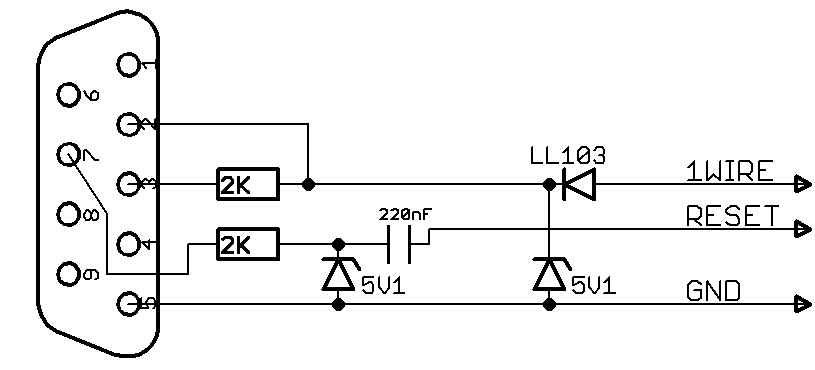

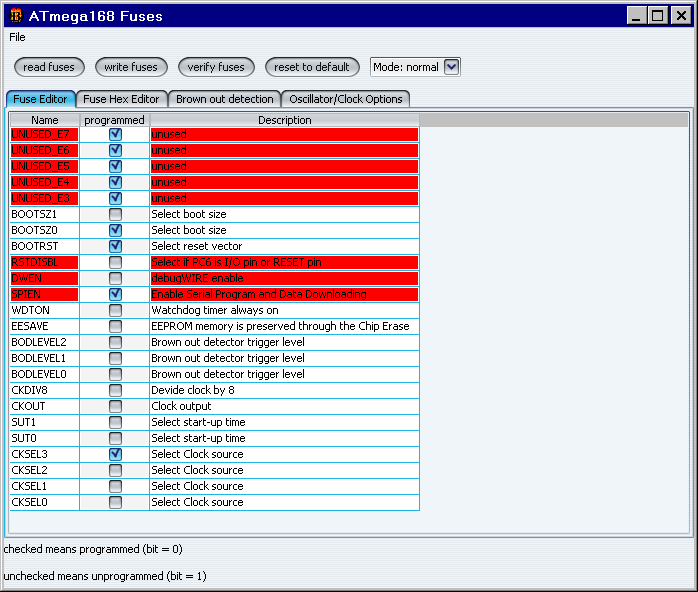

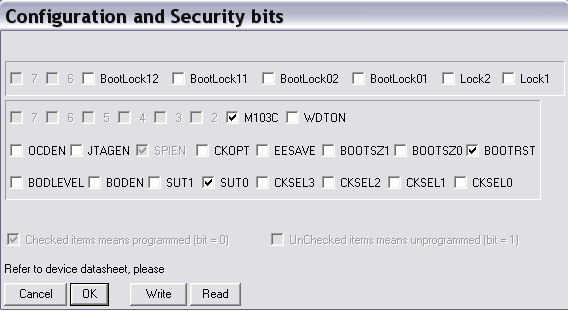

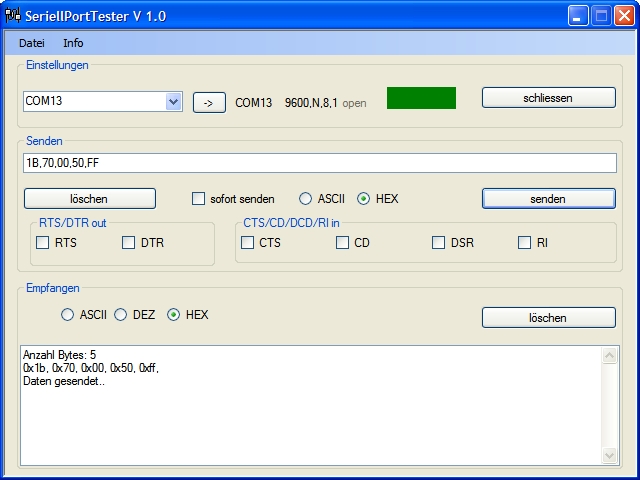

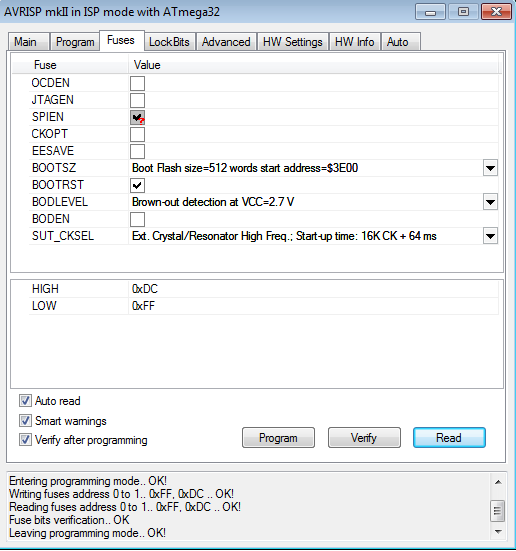



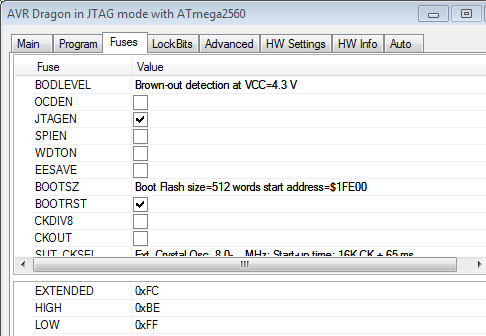
{kind=link}
{kind=link}
{kind=link}
{kind=link}