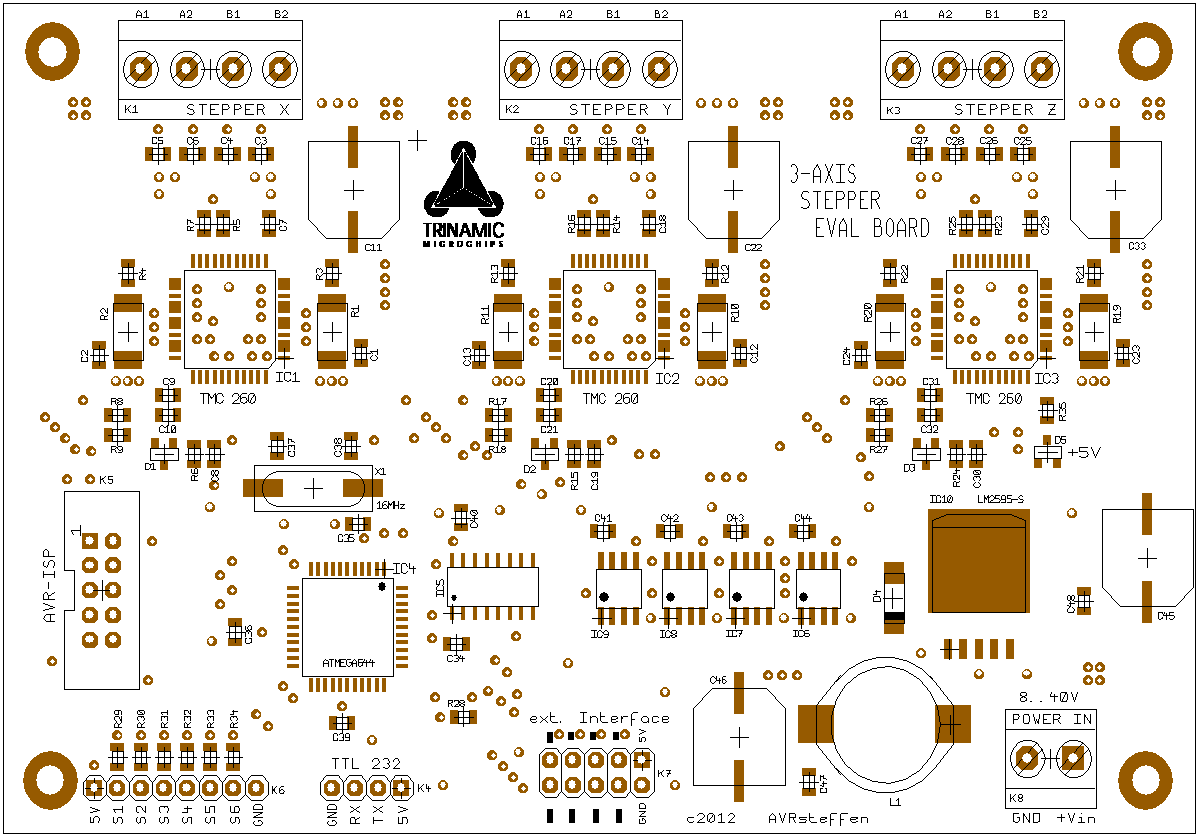
Hallo Ja,ja ich weiß. Schon wieder ne Schrittmotorsteuerung. Aber, was haltet ihr von einer 3-Achs Schrittmotorsteuerung auf Basis der neuen Treiber von Trinamic TMC260 ? Diese Treiber können via SPI parametrisiert werden und über Takt/Richtung gesteuert werden. Vorteile: - die Treiber übernehmen vollständig den Chopperbetrieb der Spulen - Fast/Slow/Mixed Decay - Stall Guard Technologie für Referenzfahrt/Schrittfehler Erkennung - integrierte Mosfets / kein Kühlkörper erforderlich (cool Step) Nachteile - nur max 1,7A Phasenstrom möglich - ??? Ich hab mir gedacht, ein AVR mega32 - mega 644 könnte doch da als Positionscontroller herhalten. Diese muss dann die Anfahr-/Bremsrampen erzeugen und übernimmt auch gleich die Interpolation von 2 bzw 3 Achsen. Jetzt bitte nicht gleich lachen und abwinken. Ich hab hier einen ATtiny2313 der sowas macht! Leider sind hier die veralteten einer Heizung ähnelnden L298 als Treiber drauf. Gechoppert wird in Hardware mit Komeratoren. Leider nicht so Optimal! Deswegen ein neuer Ansatz. Außerdem hab ich noch seriellen Speicher vorgesehen falls man doch noch das ganze als Standalone Version haben will. Was meint Ihr? Will jemand mit aufspringen? Gruß Steffen
Angehängte Dateien:
-

STEP_DRiVe_sch.PNG
23 KB -

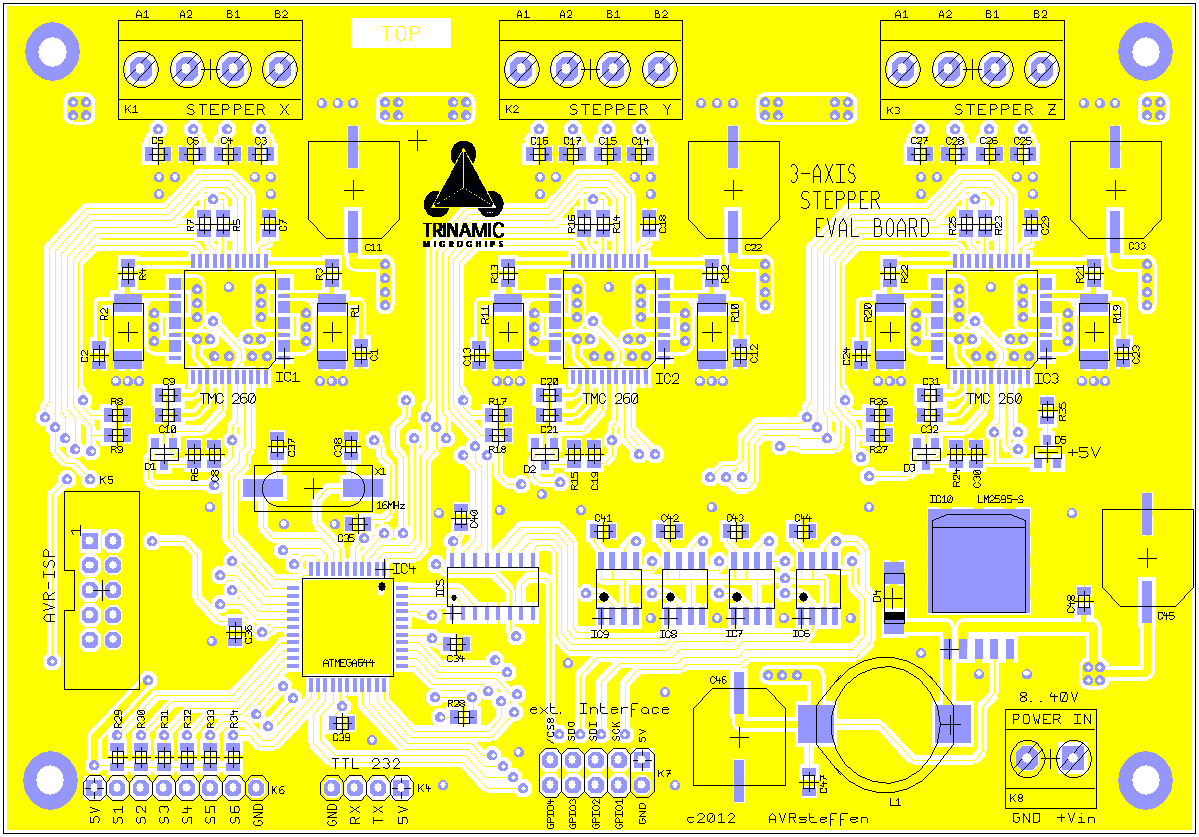
STEP_DRiVe_top.PNG
40 KB -

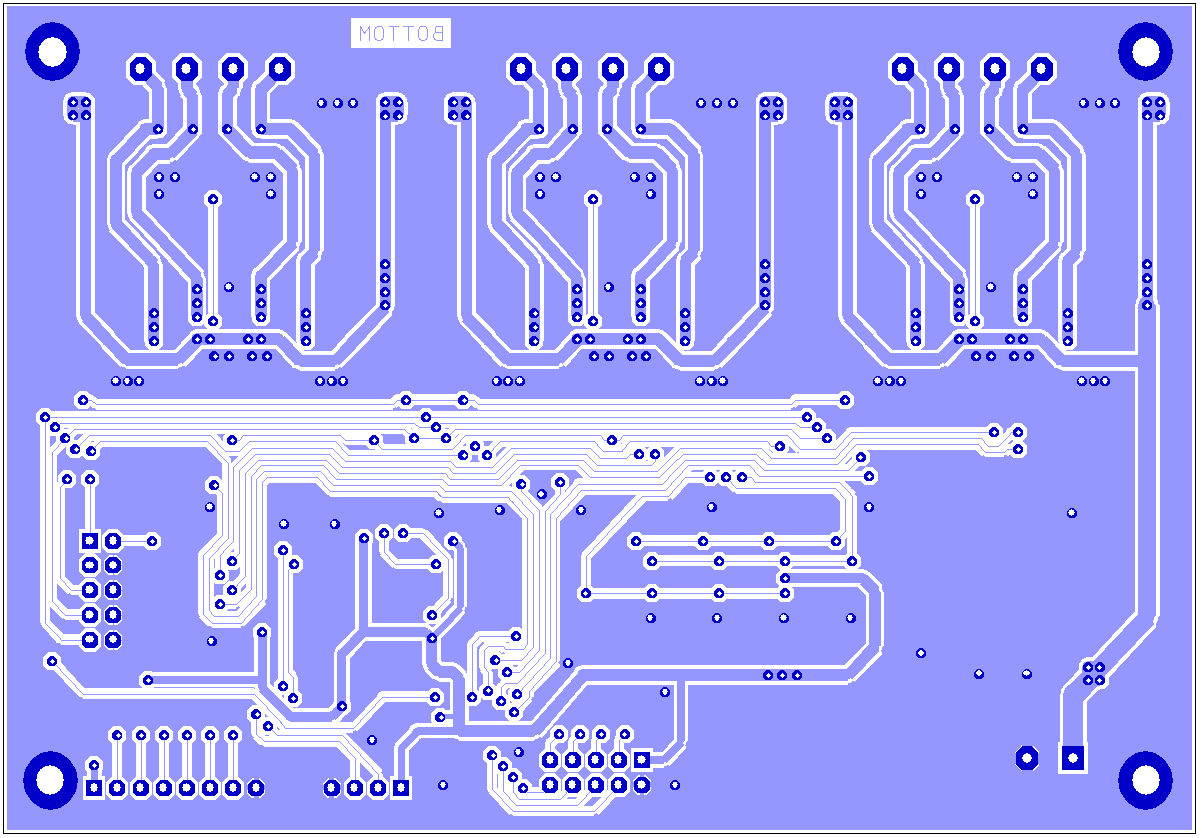
STEP_DRiVe_bottom.PNG
23 KB
Servus ! Entschuldige, wenn ich das so dreißt ausdrücke: was ist den deine Frage ? oder brauchst du eine Bestätigung von jemandem , dass es funktioniert ? und: was meinst du mit "mit aufspringen" ? Gruß, Jakov
Jakov K. schrieb: > Servus ! > Entschuldige, wenn ich das so dreißt ausdrücke: > was ist den deine Frage ? > Okay, ich hab mir den Eröffnungs-Beitrag gerade nochmal durchgelesen. Die Frage ist wirklich schlecht gestellt. Also nochmal: Was haltet Ihr von meinem Vorhaben, diese Treiber (TMC 260) für eine 3-Achs Schrittmotorsteuerung zu verwenden? UND Was haltet Ihr davon, einen ATmega32 - ATmega644 als Positionscontroller für die 3 Achsen zu verwenden. > oder brauchst du eine Bestätigung von jemandem , dass es funktioniert ? > und: was meinst du mit "mit aufspringen" ? > Will jemand mit aufspringen? -> soll heißen: Ich hab jetzt eine Leiterplatte entworfen die ich fertigen lassen würde. Vielleicht hat jemand ja auch Intresse, an solch einer 3-Achs-Steuerung auf TMC 260er Basis? Allerdings existiert für den AVR noch keinerlei Firmware. Gruß Steffen
Steffen H. schrieb: > Hallo > was haltet > ihr von einer 3-Achs Schrittmotorsteuerung auf Basis der neuen Treiber > von Trinamic TMC260 ? ich hatte voreiniger Zeit mal mit Treibern von Trinamic zu tun. Leider weiß ich mehr um welches Modell es sich damals gehandelt hat. Jedenfalls haben mich die Treiber damals vollkommen überzeugt. Auch wenn ich die TMC260 jetzt nicht wirklich kenne bin ich der Meinung, dass die Trinamic Treiber ein gute Wahl sind. > Ich hab mir gedacht, ein AVR mega32 - mega 644 könnte doch da als > Positionscontroller herhalten. Diese muss dann die Anfahr-/Bremsrampen > erzeugen und übernimmt auch gleich die Interpolation von 2 bzw 3 Achsen. > > Jetzt bitte nicht gleich lachen und abwinken. Ich hab hier einen > ATtiny2313 der sowas macht! Das klingt ja interessant. Wie ist das den gelöst (die Trajektorie meine ich)? Ich bastle nämlich gerade an einer Steuerung (Atmega644) die drei L297/L298 Kombinationen ansteuert (waren halt noch in der Bastelkiste). Hast du die Beschleunigungs-/Bremsrampen mithilfe der Timer realisiert? Und wen ja jeweils ein Timer pro Motor? lg much
Angehängte Dateien:
-

STEP_CONTROL_BOM.PNG
160 KB
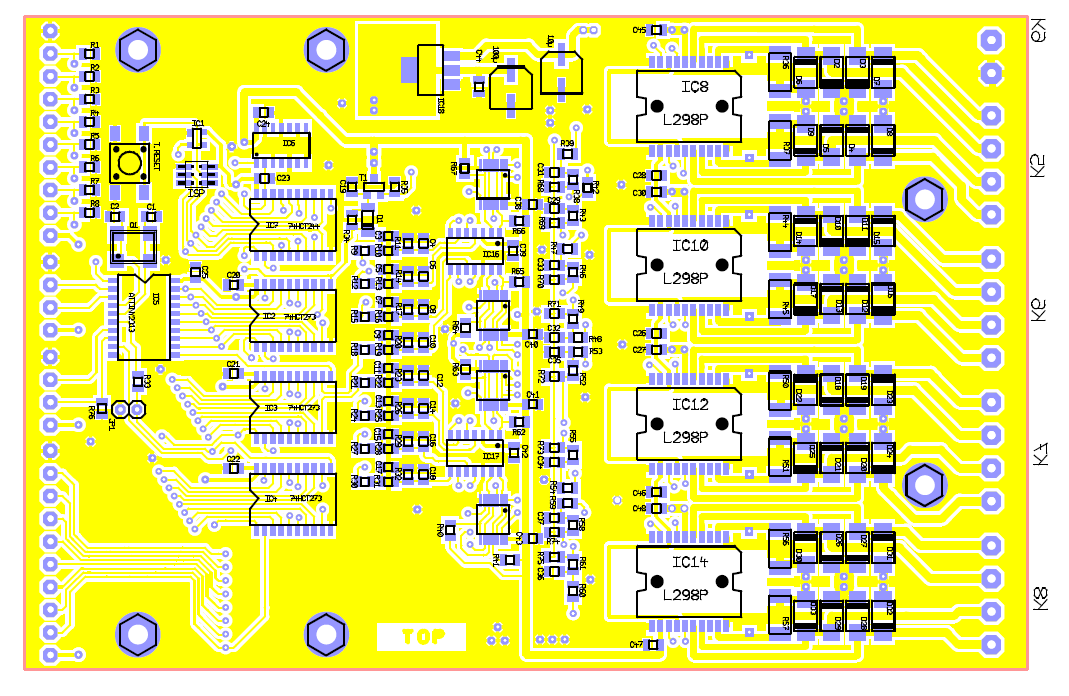
Michael N. schrieb: > Das klingt ja interessant. Wie ist das den gelöst (die Trajektorie meine > ich)? Ich bastle nämlich gerade an einer Steuerung (Atmega644) die drei > L297/L298 Kombinationen ansteuert (waren halt noch in der Bastelkiste). > Hast du die Beschleunigungs-/Bremsrampen mithilfe der Timer realisiert? > Und wen ja jeweils ein Timer pro Motor? Ich habe nur nachgebaut und die Firmware etwas abgeändert. Ur-Firmware selbst hat jemand anderes geschrieben. Die Ansteuerung von 4 Schrittmotoren inclusive Beschleunigungs-/Bremsrampen und bis zu 3-Achs Interpolation übernimmt hier ein ATtiny2313 ! Ja genau ! Mit nur 2K Flash und 128Bit SRAM ! Respekt vor diesem hochoptimierten Assembler Code von Karl-Heinz-Schweikert. Ich blick da immer noch nicht richtig durch, wie er die Interpolation gebaut hat. Jedenfalls hat es Funktioniert. Alle 3 Motoren kamen zur selben Zeit am Ziel an. Und das selbst wenn man während der aktuellen Bewegung eine neue Ziehlposition für einen Motor eingegeben hat. Sofort wurde der Master zur Interpolation neu berechnet und die Slaves neu gesetzt. Das ganze lief dann noch im Mikrostep Betrieb. Hier mal die dazugehörige Seite: http://www.s-line.de/homepages/schweikert/SMCtrl/smctrldocu.htm Ich habe mir die 4-Achs Multiplex-Version gebaut. Gruß Steffen
Hey, danke für den Link. Habs jetzt mal kurz überflogen. Sieht sehr interessant aus. lg much
Hallo Leute, So wenig Interesse an solch einer Schrittmotorsteuerung hätt ich jetzt nicht erwartet. Naja, hab mir gestern jedenfalls schon mal den Prototypen geätzt und werd ihn heute Abend anfangen zu bestücken. 348 Durchkontaktierungen, wird wohl bis in den Morgen dauern. Gruß Steffen
So die Antwort auf deinen Post passt hier besser rein als im Mechanik-Forum :) Die TMC-Controller lesen sich nicht schlecht, aber ich will LinuxCNC als Steuerung, da mir der komplette Selbstbau zu zeitintensiv ist. Damit ist für mich das SPI-Interface uninteressant. Mit einem China-Board hab ich schon spekuliert, aber wenn man die ganzen Threads durchliest, ist da auch nicht allzuwenig Arbeit noch zu tun, damit die dinger auch so funktionieren wie sie sollten. Mir geht es vor allem darum, ein qualitativ hochwertiges Treiberboard für vernünftiges Geld zu designen. Der Linear-Typ aus dem anderen Thread und der TMC sind mir zu teuer... der TB6560 wäre Ok, ein DRV8811 oder A3977SLPTR kann ich mir auch vorstellen... da werd' ich noch etwas herumsuchen... Aber ich hab da noch Zeit... ;) 73
Angehängte Dateien:
-

P1010123.JPG
420 KB -

P1010124.JPG
420 KB -

P1010121.JPG
430 KB
Hallo oe6jwf Genau so wie du planst hab ich meine L298 auf der Platine befestigt. Sind ja Power-SMD's. Deswegen hab ich ja auch die Freifräsungen in der Platine unter den L298'ern. Kühlblech hab ich dann dementsprechend gefräst, dass es an den ensprechenden Stellen durch die Leiterplatte bis an die Kühlflächen der Power-SMD-L298 ragte. Dann noch mit Bügel über den Treibern mit dem Kühlkörper befestigt, fertig war ich. Steffen
oe6jwf schrieb: > Die TMC-Controller lesen sich nicht schlecht, aber ich will LinuxCNC als > Steuerung, da mir der komplette Selbstbau zu zeitintensiv ist. Damit ist > für mich das SPI-Interface uninteressant. Naja, die TMC26x Treiberfamilie lassen sich nach der Initialisierung/Parametrierung auch mit dem Clock/Dir Interface ansteuern.
http://www.glyn.de/News-Events/Newsletter/Newsletter-2012/PCIM-Highlights-2012/Alles-in-einem-IC-Der-leistungsstaerkste-Single-Chip-Schrittmotorentreiber Also erstmal urlaub machen, und dann man schaun wann der IC verfügbar ist :)
Hallo, Dein Layout solltest Du noch einmal überarbeiten: Ich würde die Treiber um 180° drehen, dann kannst Du die Masse der Sensewiderstände und der Elkos direkt auf Top verbinden und die Versorgung auf Bottom am Rand des PCBs als Plane ausführen. Die derzeitige Ausführung der Versorgung schränkt die Wirkung der Elkos C11,C22,C33 durch die schmalen und langen Leiterbahnen stark ein. Den Schaltregler solltest Du auch neu platzieren und zwar so das GND von C45, C46 und D4 direkt und kurz durch eine Plane auf Top verbunden sind um optimale EMV zu erhalten. Gruß
Angehängte Dateien:
-

TMC260_EVAL_BOARD3.jpg
410 KB -

HTerm_parameter.PNG
38 KB
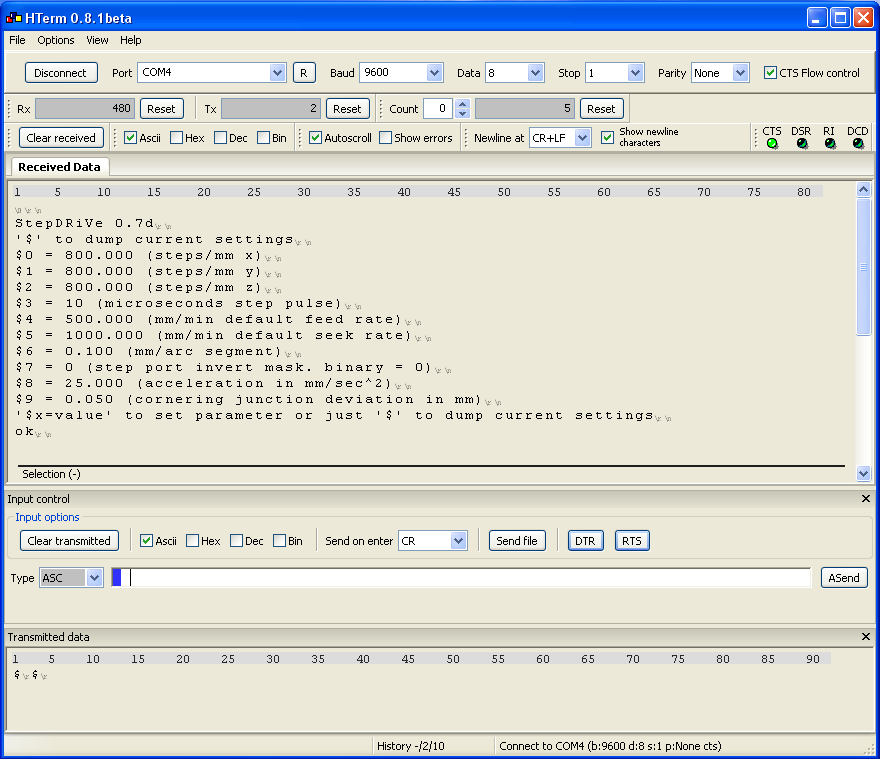
Hallo, TF (Gast) schrieb: >Dein Layout solltest Du noch einmal überarbeiten: Das werde ich machen. Die Treiber werden schon etwas warm (bei 30V/0,8A Phasenstromlimit). Da hab ich bei dem TMC Treiber an den Motoranschlüssen doch glatt die Kühlfahne im Layout vergessen! Aber.. es gibt Neuigkeiten Auf dem Board läuft seit ein paar Tagen ein angepasster G-Code-Interpreter Namens "grbl". Grbl ist von Simen Svale Skogsrud entwickelt worden und steht unter der GNU General Public License [http://www.gnu.org/licenses/quick-guide-gplv3.html]. Quelle: http://dank.bengler.no/-/page/show/5470_grbl Was schon alles implentiert ist: - G-Code Interpreter für einige RS274/ngc Standard-Befehle - einen Bewegungs-Abblauf-Planer der bis zu 18 Sets im Voraus plant - Beschleuniguns-/Bremsrampen Management - mit einer jitterfreien bis zu 30kHz schnellen Step/Dir Rate G-Code-Befehle: G0 Geradeninterpolation im Eilgang G1 Geradeninterpolation mit Vorschub [F xxxx] G2 Kreisinterpolation Bogen links (im Urzeigersinn) G3 Kreisinterpolation Bogen rechts (gegen Urzeigersinn) G4 Verweihlzeit mit Parameter P xxxx G17 Ebnenauswahl [X | Y | Z] G18 Ebnenauswahl [X | Z | Y] G19 Ebnenauswahl [Y | Z | X] G20 Maßangaben in inch G21 Maßangaben in mm G28/G30 Referenzfahrt zu den Limits, erst in Z, dann in X/Y G53 absoluten Nullpunkt setzen G80 Bohrzyklus aufheben/Bewegung anhalten G90 absolute Maßangabe G91 inkrementale Maßangabe G93 Vorschub in 1/min G94 Vorschub in mm/min oder inch/min M0/M1/M2/M30/M60 Programm Stop/Pause/Ende M3 Spindel Start / im Urzeigersinn M4 Spindel Start / gegen Urzeigersinn M5 Spindel Stop T xxxx Werkzeigauswahl (wird zwar erkannt, bewirkt aber nichts) F xxxx Vorschub P xxxx Pausenzeit S xxxx Spindeldrehzahl (wird zwar erkannt, bewirkt aber nichts) I xxxx.xxx bei G2/G3 Bogenzentrum in X J xxxx.xxx bei G2/G3 Bogenzentrum in Y K xxxx.xxx bei G2/G3 Bogenzentrum in Z R xxxx.xxx bei G2/G3 Radius X xxxx.xxx Koordinate X-Axis Y xxxx.xxx Koordinate Y-Axis Z xxxx.xxx Koordinate Z-Axis Die serielle Schnittstelle habe ich mit der Hardware (CTS) Flow-Control ausgestattet, damit man den G-Code mit einem Terminalprogramm bequem an das Board senden kann. Hier gibt es auch ein kleines Video (leider schlechte Quali) http://www.youtube.com/watch?v=qvTnohhg8GQ&feature=plcp http://www.youtube.com/watch?v=kbjn9jjbg2w&feature=plcp http://www.youtube.com/watch?v=UPoO3jW2jNM&feature=plcp TODO: Motorparameter bei der Initialisierung aus dem EEPROM über SPI an die Treiber senden, Positionsausgabe über Schnittstelle (RS232 oder SPI), Spindeldrehzahl mit PWM Gruß Steffen
Hallo Steffen Wie weit bist Du mit Deinem Controller ? Hätte Interesse daran, würde eine Null Serie mit prof gefertigten Print machen lassen wenn Du Intersse daran hast. Gib mir mal Antwort bzw Tel Nummer. Kannst mich erreichen unter +43 664 1500174 email: apo@csie-data.com Liebe Grüße Andreas
Der Tread ist umgezogen: Beitrag "G-Code-Interpreter und µStep-Controller mit ATmega644" Da gibt es auch ein neues Layout mit mehr Kühlflächen für die TMC Treiber. Ubrigens sollte die Kombination aus TMC261 und LM2591/LM2691 das ganze auf 60V aufbohren lassen. Gruß Steffen Edit: Ich hab selber noch 2 industriell gefertigte Leiterplatten rumliegen. Aber danke für das Angebot.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.