Ich habe noch Mal eine Nachfrage, die sich aus dem Lesen von: https://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM und meiner verwendeten H-Brücke VNH3SP30 ergibt. In der Erläuterung zum 2-Quadrantensteller heißt es: "...Sollte die Spannungsquelle z. B. aus einem Transformator mit Gleichrichter bestehen, kann dieser die Energie nicht aufnehmen sondern nur C1, was dazu führt, dass die Betriebsspannung ansteigt bis eventuell einer der Transistoren zerstört wird. Um dies zu verhindern ist eine Überspannungsbegrenzung in Form eines Bremswiderstands vorzusehen (Bremschopper)." Gilt dies auch für den 4-Quadrantensteller (insbesondere für meinen Baustein)? In der Erläuterung zum 4-Quadrantensteller gibt es: 1. und 2. Woran erkenne ich im Datenblatt des VNH3SP30, um welche Art es sich handelt? ...sowie in der Zusammenfassung: "etwa doppelt so große Verluste wie 2 Quadrantensteller". Bezieht sich dies auf 1. oder 2. ? Unter PWM: "Um den Stromripple gering, also das Drehmoment konstant zu halten, sollte die Periodendauer der PWM diese Zeit nicht überschreiten. Vor allem im 2 bzw. 4-Quadratentebetrieb ist dies wichtig, denn dort kann der Strom auch seine Richtung ändern, was zu einem Abbremsen, somit zu einem deutlichen Ruckeln und zu Vibrationen des Motors und zu unnötigen Verlusten führt." "Die aus elektrischer Sicht ideale PWM Frequenz liegt daher meist bei 1-2kHz." Wie sieht es mit der Effektivität bei deutlich geringeren Frequenzen von etwa 30Hz aus? Beitrag "Re: PWM Frequenz für den VNH3SP30-E" Beim Lesen von: Beitrag "PWM Regler mit Strombegrenzer" merke ich eindeutig, dass mir Fachwissen fehlt, doch da auch viel "diskutiert" wird (@fakl & @0815 Spaß muss sein;), würde es mir sicher helfen, wenn mir Jemand die Quintessenz dieses Beitrages im Bezug auf meinen VNH3SP30 nennen kann. (Brauch ich so etwas?) Grüße Oekel
D a v i d K. schrieb: > Gilt dies auch für den 4-Quadrantensteller Ja. Es gilt generell: wenn das System nicht rückspeisefähig ist, steigt beim Bremsen die Zwischenkreisspannung an, weil die im Motor/Antriebsstrang gespeicherte Energie in den Zwischenkreiskondensator eingelagert wird. > (insbesondere für meinen Baustein)? Dein "Baustein" (der danach dann auch mal namentlich erwähnt wird) ist ja nur die Leistungsendstufe, quasi nur die allerletzten Transistoren. Das ist eine ganz andere Systemebene als die Frage nach den Quadranten und der Rückspeisung... D a v i d K. schrieb: > Wie sieht es mit der Effektivität bei deutlich geringeren Frequenzen von > etwa 30Hz aus? Die Schaltverluste werden kleiner, aber dein Motor wird mit 30Hz ganz hübsch rumpeln... Jetzt drehen wir den Spieß einfach mal um und fragen: Was willst du machen?
Lothar M. schrieb: > > Jetzt drehen wir den Spieß einfach mal um und fragen: Was willst du > machen? Ich möchte einfach nur einen 24VDC Motor mit Sanftanlauf von 0V auf 12,5V hochfahren. Dort einige Zeit verweilen und wieder runter fahren. Richtungswechsel und das ganze erneut von vorne. (Es handelt sich dabei um ein Reinigungsgerät. (Am Ende hängen Dauermagneten, die ein Granulat in einem Behälter in Bewegung versetzt) Da diese Permanentmagnete eine gewisse Masse haben, möchte ich den Sanftanlauf/Abbremsung nicht zu kurz setzen, da ich sonst Angst um meine Schaltung habe. (Induzierter Strom aus den Motorwindungen) Die beste Reinigung wird jedoch bei möglichst rascher Umkehrung der Laufrichtung erreicht. Daher interessiere ich mich für die Theorie/Risiken (in möglichst einfachen Worten) was die externen Bauteile um die Leistungsstufe angeht. Ergänzung oder falsche Dimensionierung dieser. Oft wird ja auch die externe beschaltung von Freilaufdioden empfohlen, um die inneren zu entlasten. Also welche externe Beschaltung, außer dem im Datenblatt angegebenen Kondensator am Eingang, macht Sinn? Grüße Oekel PS: Nein, bei 30Hz ruckelt das Motörchen komischerweise überhaupt nicht. Es sei denn mein Ozi zeigt fälschlicherweise 30Hz an, doch die theoretische Berechnung sagt dasselbe.
D a v i d K. schrieb: > PS: Nein, bei 30Hz ruckelt das Motörchen komischerweise überhaupt nicht. > Es sei denn mein Ozi zeigt fälschlicherweise 30Hz an, doch die > theoretische Berechnung sagt dasselbe. Kein Ruckeln bei 30 Hz? Nicht schlecht. Hätte hier mal locker eine 300 Hz PWM genommen wenn nicht gar gleich 3 kHz. Bricht man sich ja keinen Zacken aus der Krone.
M. K. schrieb: > Kein Ruckeln bei 30 Hz? Nicht schlecht. Hätte hier mal locker eine 300 > Hz PWM genommen wenn nicht gar gleich 3 kHz. Bricht man sich ja keinen > Zacken aus der Krone. Scheinbar doch, denn das war erst der Grund, weshalb ich meinen eigenen Rechenkünsten nicht mehr traute und den KAVRCalc runtergeladen und verwendet habe. F_CPU = 8000000 Prescaler = 8 FAST_PWM -->3906.250 Hz Und da wurde die Leistungsstufe richtig heiß! F_CPU = 8000000 Prescaler = 1024 FAST_PWM -->30.518 Hz Eine Vermutung / Erklärung?
D a v i d K. schrieb: > FAST_PWM -->3906.250 Hz > > Und da wurde die Leistungsstufe richtig heiß! Öhm…die VNH3SP30 macht aber eine PWM bis zu 10 kHz. Wie schaut denn dein konkreter Schaltplan aus? Da scheint ja was im Argen zu liegen. Eine Idee hab ich leider nicht. Die PWM hast du mit dem Oszi schon nachgemessen? Die Timings stimmen alle?
M. K. schrieb: > D a v i d K. schrieb: >> FAST_PWM -->3906.250 Hz >> >> Und da wurde die Leistungsstufe richtig heiß! > > Öhm…die VNH3SP30 macht aber eine PWM bis zu 10 kHz. Eben ;) > Wie schaut denn dein konkreter Schaltplan aus? Kann ich morgen Mal posten (falscher Rechner), doch im groben hängt der Atmega88 einfach nur mit 3 Pinnen+Vorwiederstand (PWM,INA,INB) an der Leistungsstufe. VCC24 direkt an dieser und der Motor direkt dahinter. > Idee hab ich leider nicht. Die PWM hast du mit dem Oszi schon > nachgemessen? Die Timings stimmen alle? Oszi sagt 30Hz. Welche Timings meinst du sonst noch? Grüße Oekel
D a v i d K. schrieb: > Daher interessiere ich mich für die Theorie/Risiken (in möglichst > einfachen Worten) was die externen Bauteile um die Leistungsstufe > angeht. > Ergänzung oder falsche Dimensionierung dieser. > Oft wird ja auch die externe beschaltung von Freilaufdioden empfohlen, > um die inneren zu entlasten. > > Also welche externe Beschaltung, außer dem im Datenblatt angegebenen > Kondensator am Eingang, macht Sinn? Servus, Wir brauchen Daten. Um welche Motor handelt es sich den? Welche Pufferung hast du? Gleichstrommotoren haben halt die Charakeristik, dass sie beim Starten einen Kurzschluß verursachen bis die EMK der Spannung entgegen wirkt. Deshalb es nicht schlecht zu wissen, welchen Innenwiderstand der Motor hat. Es kann Sinn machen den Strom zu regeln. Sehr große DC Motoren haben auch eine große Induktivität. Diese wirkt wie eine Drossel und glättet den Strom. Wählt man eine zu große PWM Freq., dann kann es sein, dass der Motor nicht die Leistung bringt, aufgrund der Zeitkonstante L/R...
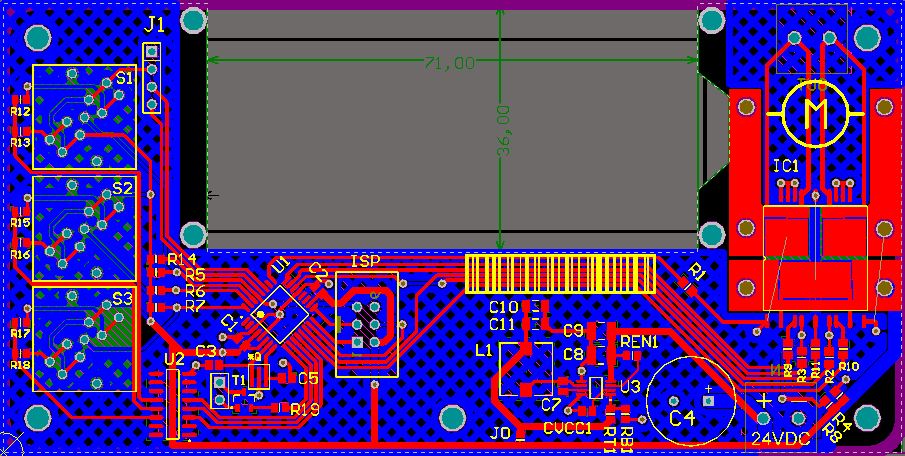
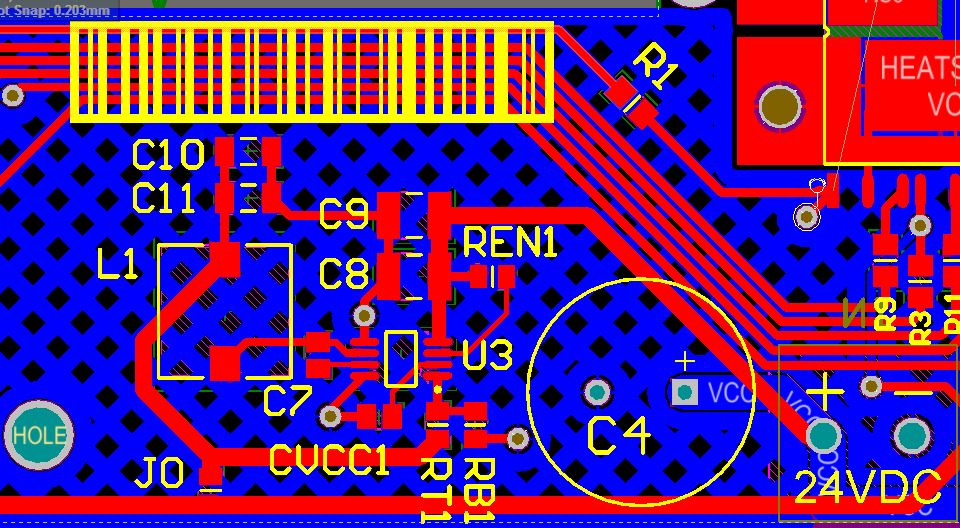
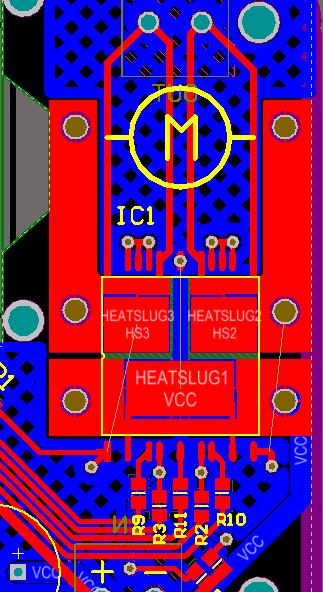
aSma>> schrieb: > Deshalb es nicht schlecht zu wissen, welchen Innenwiderstand der Motor > hat. > Es kann Sinn machen den Strom zu regeln. > > Sehr große DC Motoren haben auch eine große Induktivität. Diese wirkt > wie eine Drossel und glättet den Strom. Wählt man eine zu große PWM > Freq., dann kann es sein, dass der Motor nicht die Leistung bringt, > aufgrund der Zeitkonstante L/R... Das ließ mich nun doch nicht schlafen ;) Motoreckdaten: 03DCM454-24-5,4-3900-22 (drive-system.com) [24V max 8A] (Leider konnte ich kein Datenblatt des Motors im Netz finden, rufe da später Mal an) Die Schaltung ist im Anhang. Grüße Oekel
D a v i d K. schrieb: > Oszi sagt 30Hz. > Welche Timings meinst du sonst noch? Wie zum einem die Signale INA, INB zueinander stehen und wie der Spannungsverlauf über (bzw. der Stromverlauf durch) den Motor ausschaut. Ich vermute, wie aSma schon sagte, dass der Motor vielleicht auch nur unnötig oft gestartet/gebremst wird weil INA und INB nicht so perfekt zueinander geschaltet werden. Der µC bringt hier vielleicht einen konstanten Versatz rein und bei kleinerer Frequenz hat man a. weniger dieser ungünstigen Zustände und b. auch mehr Zeit zum abkühlen. Was ich auch sehe an deinem Schaltplan: INA hast du auf einen "normalen" PIN, INB jedoch hast du auf einen PWM-fähigen PIN. Du wirst doch keine PWM auf INB geben?
M. K. schrieb: > Was ich auch sehe an deinem Schaltplan: INA hast du auf einen "normalen" > PIN, INB jedoch hast du auf einen PWM-fähigen PIN. Du wirst doch keine > PWM auf INB geben? Nein, PTimer/PWM liegt nur auf "PWM" die beiden IN* verwende ich binär-xor-logisch verknüpftfür die Drehrichtung, sonst nichts. Ist also immer nur EINER auf "1" für den Anlauf und sonst "0" && "0"
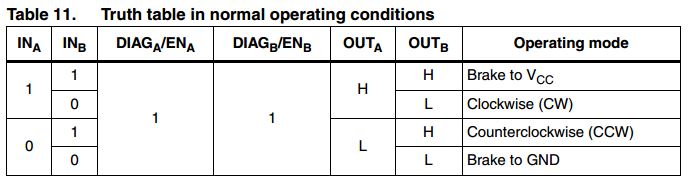
D a v i d K. schrieb: > Ist also immer nur EINER auf "1" für den > Anlauf und sonst "0" && "0" Das heißt also, du gibst immer Gas und bremst dann gleich wieder gegen GND? (Table 11, Seite 13 ;)) OK, das wäre eine Erklärung warum der Treiber heiß wird bei ~4 kHz und bei 30 Hz halbwegs kühlen Kopf bewahrt.
M. K. schrieb: > Das heißt also, du gibst immer Gas und bremst dann gleich wieder gegen > GND? "immer gleich" sind bei mir 30sec. Intervall zwischen Rechtslauf und Linkslauf Anlauf und Abbremsen aktuell +- 3sec. Heiß ist er aber bereits bei ca. 20/255 PWM nach 1-2 Sekunden. Wenn ich sofort mit 200/255 durchstarte bleibt er "relativ" kühl auch bei der höheren Frequenz. (Glaskugel?)
M. K. schrieb: > Das heißt also, du gibst immer Gas und bremst dann gleich wieder gegen > GND? Sein Programm sehe ich zwar nicht, aber er legt die PWM wohl an Enable. Da muß es doch garnicht ruckeln. Das ist wie beim Fahrrad ohne Rücktrittbremse: Beschleunigen und Auslaufen lassen. Regeln kann man so allerdings auch nicht. Die beiden PWM-Signale gehören an INA und INB.
Angehängte Dateien:
-

INA_INB.JPG
33 KB -

VNH3SP30_typical.JPG
71 KB
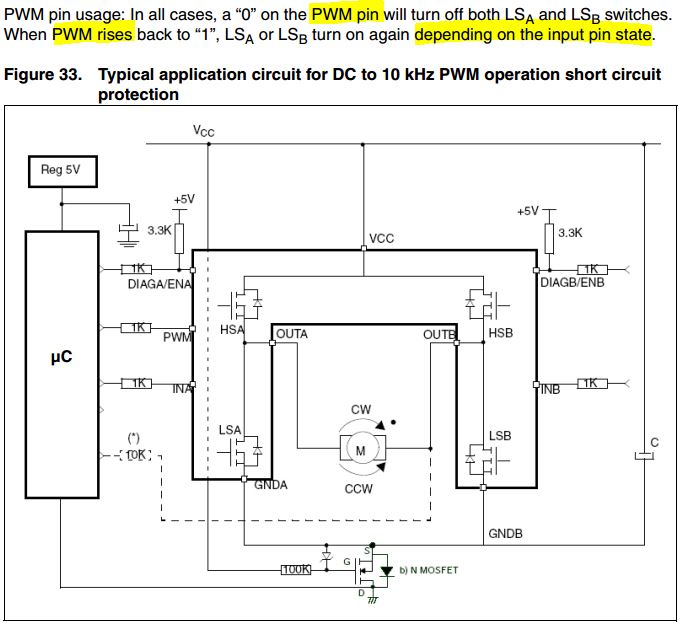
m.n. schrieb: > allerdings auch nicht. > Die beiden PWM-Signale gehören an INA und INB. Ich bin ja für wirklich jede Hilfe dankbar, aber bist du dir da ganz sicher? So wie ich das Datenblatt lese ist dies NICHT richtig. Beim Pin "PWM" ist von einer steigenden Flanke die Rede. Dies taucht meines Wissens nur im Sprachgebrauch von einem generierten PWM-Signal auf. Und eine Logigtabelle für PWM wäre mir auch neu. Ich habe mal die beiden Ausschnitte mit angehängt. Das komplette Datenblatt gibt es u.a. hier: https://www.pololu.com/file/download/vnh3sp30.pdf?file_id=0J51 Grüße Oekel
Servus, was ist jetzt konkret dein Problem? Wird Treiber zu heiß oder funktioniert die Steuerung nicht? Hast du Probleme bei der Ansteuerung PWM? Wie groß ist der Innenwiderstand des Motors? Das kann man messen. Weiterhin kann man die Induktivität messen. Falls dies nicht geht auch nicht schlimm. Nehmen wir an der R=0.5 ohm, dann haben wir einen Strom von 24A bei 12V. Ist ne Menge. Diese Leistungsabgabe muss auch gepuffert werden mit Low-ESR Kondensatoren ca. 1000µF/A. Also bei 8A 8µF. Da die Leistungstufe bis 30A es arbeitet, es nur normal, dass diese auch heiß wird. (siehe Datenblätter) Kühlung erforderlich? Es gibt verschiedene Arten einen Motor mit PWM zu bewegen. Maxon hat dazu was ganz gutes herausgebracht. Und auf den letzten Seiten kann nachlesen wie man die PWM Freq auslegt. Man kann natürlich mit einen Shunt und einen Oszi. den Stromverlauf anschauen... https://www.servo2go.com/support/attachments/PWM%20technical%20information.pdf mfg
m.n. schrieb: > Die beiden PWM-Signale gehören an INA und INB. Noch mal ins Datenblatt schaun. An INA und INB gehört definitiv keine PWM. D a v i d K. schrieb: > "immer gleich" sind bei mir 30sec. Intervall zwischen Rechtslauf und > Linkslauf Anlauf und Abbremsen aktuell +- 3sec. Achso, du fährst also auf eine bestimmte Geschwindigkeit hoch, bleibst da dann und bremst wieder ab. Hm, dann schaut das eigentlich auch in Ordnung aus. Es sollte eigentlich keinen Unterschied machen ob dein PWM 30 Hz oder 3 kHz hat. Ist ein komisches Verhalten bei dir…
aSma>> schrieb: > Nehmen wir an der R=0.5 ohm, dann haben wir einen Strom von 24A bei 12V. Kann man da bereits etwas aus der Kurve ableiten? > Ist ne Menge. Diese Leistungsabgabe muss auch gepuffert werden mit > Low-ESR Kondensatoren ca. 1000µF/A. Also bei 8A 8µF. Da die Du meinst sicherlich 1000nF/A? > Man kann natürlich mit einen Shunt und einen Oszi. den Stromverlauf > anschauen... Letztendlich geht es mir darum, dass ich die Platine baldmöglichst in Serie schicken kann. Wenn dann ein bedrahtetes Bauteil gegen ein anderes getauscht werden müsste,wäre das nicht so schlimm. Die Betonung liegt jedoch auf EIN und TH, denn 95% ist SMD und sollte wegen der Stencil "final" sein. Ich habe derzeit zwei Prototypenboards zum basteln. An welcher stelle käme denn der Low-ESR? zwischen die Motorbeinchen? Also noch Mal konkret. Es funktioniert bereits, aber basierend auf wenig/schlechtem Basis-theoriewissen. Was ich mir aus diesem Thread als Antwort erhoffe, ist ob ich noch an der Hardware nachbessern muss, das müsste recht bald passieren, oder ob ich einen nahezu perfekten Ablauf später per Software ergänzt bekomme? (Dann hätte ich noch genügend Zeit mir Wissen anzulesen) > https://www.servo2go.com/support/attachments/PWM%20technical%20information.pdf > Das PDF lese ich mir heute Abend durch. (siehe Anhang) Mehr konnte ich vom Distributor nicht bekommen. Er meinte diese Motoren spielen in der untersten Preiskategorie (China). Danke für eure Bemühungen! Oekel
D a v i d K. schrieb: > Kann man da bereits etwas aus der Kurve ableiten? Ja. Im blockierten Zustand hat der Motor 8A bei 24V. R=U/I ==> 3 ohm. Bei 12 Volt fließt ein Blockierstrom/Startstrom von der Hälfte von 8A. (Steht auch im Datenblatt und STALL). D a v i d K. schrieb: > Du meinst sicherlich 1000nF/A? Ne, ist schon richtig µF. Hängt natürlich davon ab, wie lang die Leitung vom Motor sind und wie gut die Spannungsquelle ist. Wenn es eine 12V Batterie ist, dann ist eine Pufferung dennoch gewollt. Dies schont die Batterie vor Erhitzung/Alterung. Wie gesagt es hängt alles vom Arbeitspunkt ab. D a v i d K. schrieb: > An welcher stelle käme denn der Low-ESR? > zwischen die Motorbeinchen? Also, wenn man etwas in "Serie" bringen will, dann muss man sich wenigsten "ein wenig" auskennen, sonst brennt die Bude ab. Kondensatoren kommen an den Motortreiber! Wohin den sonst. Vcc Supply und GND aber möglichst nahe am Motortreiber. Du hast lediglich C8,C9 mit 10µF drin. Ein wenig Migrik. D a v i d K. schrieb: > Was ich mir aus diesem Thread als Antwort erhoffe, ist ob ich noch an > der Hardware nachbessern muss, das müsste recht bald passieren, oder ob > ich einen nahezu perfekten Ablauf später per Software ergänzt bekomme? > (Dann hätte ich noch genügend Zeit mir Wissen anzulesen) Ha. Du hast doch schon einen Prototypen gebaut? Da muss es erstmal funktionieren! Sonst: -Ich sehe keine einzige Sicherung -Bzw kein Verpolungsschutz (dann wenigstens Sicherung rein) -Schutzmaßnahmen gegen EMK, Z-Diode oder ähnliches Habe nur kurzreingeschaut. mfg
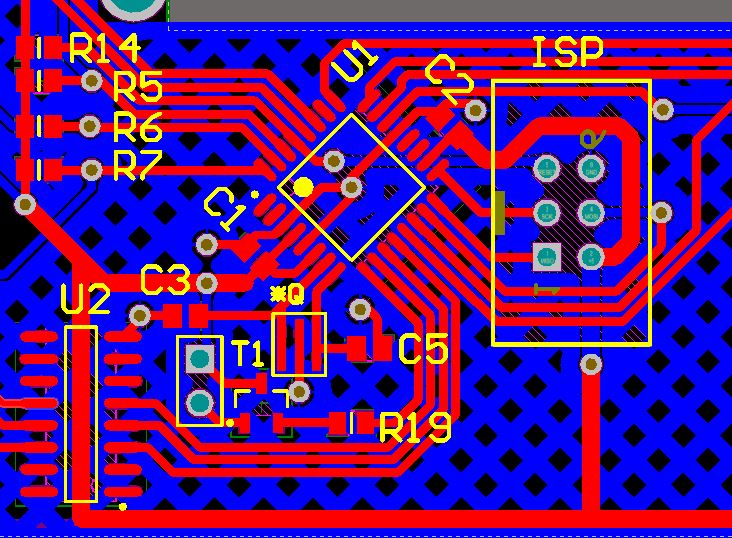
D a v i d K. schrieb: > Was ich mir aus diesem Thread als Antwort erhoffe, ist ob ich noch an > der Hardware nachbessern muss Habe mir deinen Schaltplan angeschaut: Außer den Bemerkungen von aSma: - die Pullups R5, R6, R7 sind nicht nötig, sowas hat der Atmega88 schon eingebaut, muss du nur aktivieren - T1: Warum ein PNP? Sowas ist relativ schwierig zu schalten. Eine NPN wäre vom Handling her einfacher. - Oszilator: Warum nicht den internen Oszilator benutzen? Sparst du Bauteile und ich sehe nichts was einen externen Oszilator benötigen würde. - Entstörkondensatoren mit 10 uF? (C8,C9, C10 und C11) Warum nicht 100 nF? - J0: Wofür ist das gut? Soll das die vermisste Sicherung sein? - Zwischen Vcc und AVcc gehört eigentlich eine Induktivität und die würde ich hier, da hier ein Motor angesteuert wird, auch dringend benutzen. - An ARef (AVcc und co übrigens auch) gehört ein Kondensator, etwa 100 nF gegen Masse. Auch am Reset-Pin ist sowas nicht falsch. - ULN2003: Der hat noch keine Versorgungsspannung. Soweit erstmal was mir nur so aufgefallen ist.
aSma>> schrieb: > Ja. Im blockierten Zustand hat der Motor 8A bei 24V. R=U/I ==> 3 ohm. > Bei 12 Volt fließt ein Blockierstrom/Startstrom von der Hälfte von 8A. Danke fürs hervorheben! Hab es echt nicht gesehen. > vom Motor sind und wie gut die Spannungsquelle ist. Wenn es eine 12V > Batterie ist, dann ist eine Pufferung dennoch gewollt. Dies schont die Netzteil mit 24VDC > kommen an den Motortreiber! Wohin den sonst. Ich wollte damit nur sicher gehen, dass zwischen Treiber-IC und Motor kein einziges Bauteil mehr kommt. Also eine Glättung dort wäre quatsch? Wird ausschließlich durch die Windungen vom Motor geglättet? > Vcc Supply und GND aber > möglichst nahe am Motortreiber. Du hast lediglich C8,C9 mit 10µF drin. Die 4x 10µF habe ich aus dem Vorschlag für den Tiefsetzer genommen, deswegen stehen die im Schaltplan auch in dessen Nähe. Den du suchst ist wohl mein C4. Den habe ich als TH ausgelegt und am Testboard mit 4700µF bestückt. (Wusste nicht wie klein ich den dimensionieren kann) Wie im Datenblatt "500μF per 10A" -->200µF/4A? > funktionieren! Sonst: > -Ich sehe keine einzige Sicherung > -Bzw kein Verpolungsschutz (dann wenigstens Sicherung rein) > -Schutzmaßnahmen gegen EMK, Z-Diode oder ähnliches Stimmt, eine Sicherung wäre angebracht. EMK muss ich noch Mal nachlesen. > - die Pullups R5, R6, R7 sind nicht nötig, sowas hat der Atmega88 > schon Ich weiß, aber die 4 in SMD machen mich nicht arm. > - T1: Warum ein PNP? Sowas ist relativ schwierig zu schalten. Eine NPN > wäre vom Handling her einfacher. Nehme ich evtl. wieder ganz raus, war gedacht, um die +5V Display-Beleuchtung zu dimmen. Bin mir nicht sicher, ob ich ein "dimmen" über I2C hin bekomme. (Evtl. ist der Bus dafür zu langsam?) > - Oszilator: Warum nicht den internen Oszilator benutzen? Sparst du > Bauteile und ich sehe nichts was einen externen Oszilator benötigen > würde. Vorerst verwende ich auch den internen. Der externe ist WENN dann mit 20Mhz, dann kann ich mit den Überproduktionen noch etwas spielen. > - Entstörkondensatoren mit 10 uF? (C8,C9, C10 und C11) Warum nicht 100 > nF? Siehe oben, stammt aus dem Vorschlag für den Tiefsteller 1:1 > - J0: Wofür ist das gut? Soll das die vermisste Sicherung sein? Jein, ich prüfe die Spannungsversorgung immer erst gerne, bevor ich sie auf den µC loslasse. Lötfehler oder vertauschtes Bauteil und schon ist er dahin. Ist also ein 0Ohm./Lötbrücke. > - Zwischen Vcc und AVcc gehört eigentlich eine Induktivität und die > würde ich hier, da hier ein Motor angesteuert wird, auch dringend > benutzen. > - An ARef (AVcc und co übrigens auch) gehört ein Kondensator, etwa 100 > nF gegen Masse. Auch am Reset-Pin ist sowas nicht falsch. Werde ich noch nachrüsten. > - ULN2003: Der hat noch keine Versorgungsspannung. Eigentlich sollte die da sein, denn er funktioniert und steuert die LEDs wunderbar an ;) > Danke für den vielen Input. Grüße Oekel
D a v i d K. schrieb: > Ich weiß, aber die 4 in SMD machen mich nicht arm. Bringen dir aber nur mehr Aufwand statt einfach das entsprechende Bit zu setzen im Atmega. Nur den Pullup am Reset würde ich lassen. D a v i d K. schrieb: > Siehe oben, stammt aus dem Vorschlag für den Tiefsteller 1:1 Ach, dann hast du für die restlichen ICs gar keine Abblockkondensatoren vorgesehen? Das solltest du nachholen. So was kann einem fiese Fehler einbringen nach denen man lange sucht. ;) D a v i d K. schrieb: > Vorerst verwende ich auch den internen. Der externe ist WENN dann mit > 20Mhz, dann kann ich mit den Überproduktionen noch etwas spielen. Also ich setze Quarzoszillatoren nur ein, wenn ich z.B. mit der seriellen Schnittstelle arbeite. Wo glaubst du denn bei dem Aufbau mal mehr als 8 MHz zu brauchen? OK, kann man natürlich optional vorsehen. D a v i d K. schrieb: > Eigentlich sollte die da sein, denn er funktioniert und steuert die LEDs > wunderbar an ;) Also ist der gepostete Schaltplan nicht der, der real aufgebaut wurde?
D a v i d K. schrieb: > Ich wollte damit nur sicher gehen, dass zwischen Treiber-IC und Motor > kein einziges Bauteil mehr kommt. Also eine Glättung dort wäre quatsch? > Wird ausschließlich durch die Windungen vom Motor geglättet? Nicht Glättung, sondern Pufferung vom Netzteil. D a v i d K. schrieb: > Den du suchst ist wohl mein C4. Den habe ich als TH ausgelegt und am > Testboard mit 4700µF bestückt. (Wusste nicht wie klein ich den > dimensionieren kann) Wie im Datenblatt "500μF per 10A" -->200µF/4A? K.A.,was ein TH ist. Wenn es der Motortreiber sein soll, dann bleib bei der Capazität 2000-4000µF + 100n Kerko X7 oder so, nahe am Treiber. Du willst an unnötigen Pullup´s Geld und Zeit verschwenden, anstatt die wichtigere Komponente im ganzen Geflecht "unterstützen". Nun so sei es. Was Datenblätter sagen und wie die Realität ist, das sind zwei Paar Schuhe. Wenn du willst dass es zwei Jahre hält, dann nur zu. D a v i d K. schrieb: > EMK muss ich noch Mal nachlesen. Jeder Motor ist auch ein Generator. Jetzt stell dir vor jemand erzeugt durch Bewegung der Einrichtung, eine Spannung. Und pump es knallt. Der Treiber oder die Spannungsquelle (bestimmt ein Schaltnetzteil). mdf
aSma>> schrieb: > K.A.,was ein TH ist. Erschreckend. Aus dem Kontext geht doch nur Through Hole, also Durchsteckmontage ;) aSma>> schrieb: > Was Datenblätter sagen und wie die Realität ist, das sind zwei Paar > Schuhe. Es ist aber auch nicht verkehrt sich daran zu orientieren ;)
Angehängte Dateien:
-

Prototyp0.JPG
140 KB -

Prototyp1.JPG
130 KB -

Prototyp2.JPG
160 KB -

Prototyp3.JPG
68 KB
{kind=link}
M. K. schrieb: > Ach, dann hast du für die restlichen ICs gar keine Abblockkondensatoren > vorgesehen? Das solltest du nachholen. Doch links oben sind noch die 2x 100nF für den Atmega88. K > Also ist der gepostete Schaltplan nicht der, der real aufgebaut wurde? Doch 1:1 aSma>> schrieb: > der Capazität 2000-4000µF + 100n Kerko X7 oder so, nahe am Treiber. ok > willst an unnötigen Pullup´s Geld und Zeit verschwenden, anstatt die > wichtigere Komponente im ganzen Geflecht "unterstützen". Wir reden hier von 3x 1,3Cent? Aber lassen wir meine unnötigen Pullups mal außen vor, die sind in nahezu 0 Zeitaufwand mit Brücken zu 0,1Cent ersetzt. Wenn du mir die "wichtigen Komponenten im ganzen Geflecht" nennen könntest, wäre mir damit sehr geholfen. Lieber auf der Platine einige mehr drauf zeichnen und später NB (nicht bestücken) als die ganze Serie in den Eimer treten zu müssen. Klar wird es noch Nachfolgemodelle mit Verbesserungen geben, aber die ersten 30 müssen auch erst Mal an den Mann gebracht werden. > Jeder Motor ist auch ein Generator. Jetzt stell dir vor jemand erzeugt > durch Bewegung der Einrichtung, eine Spannung. Und pump es knallt. Kann hier nicht auftreten, aber das Gleiche wäre doch auch beim Auslaufen des Motors denkbar, oder nicht? > Treiber oder die Spannungsquelle (bestimmt ein Schaltnetzteil). Schaltnetzteil. Ich poste noch Mal 1-2 Bilder, vielleicht entdeckt ihr ja noch mehr Fehler. Ja TH steht bei mir immer für "Through Hole". Dachte das wäre gängig. Sorry. Grüße Oekel PS: Ich will hier nichts vorgebeten bekommen, bin aber in Anbetracht der Zeitknappheit sehr dankbar, dass ich auf diese Weise mit euch lernen darf. Komme einfach aus der falschen Ecke, was den Lehrstuhl angeht, und bisher traf ich nur auf Bücher die 95% das beschrieben, was ich bereits kannte, oder so eine steile Lernkurve hatten, dass ohne E-Technik studiert zu haben ich schnell abgeschaltet habe :( Komprimiertes Wissen für spezifische Themen ist leider schwer zu finden. Buchempfehlungen sind immer gerne gesehen. Und weil es i.d.R. viel zu selten gesagt wird DANKE!
Jetzt werden schon die hohen Kosten für Widerstände bemängelt und übersehen, daß der ULN2003 mit einem GND-Anschluß bestens verdrahtet ist. Aber was ist denn nun mit der Erwärmung und der eigentlichen PWM-Ansteuerung? Darum würde ich mich doch zuerst kümmern. aSma>> schrieb: > -Ich sehe keine einzige Sicherung > -Bzw kein Verpolungsschutz Eine selbstrückstellende Sicherung (PolySwitch) wäre nicht schlecht und, wenn ein Schaltnetzteil verwendet wird, auch eine Diode, die nicht nur als Verpolschutz fungiert, sondern auch das Netzteil aktiv hält, wenn beim Bremsen die Ausgangsspannung ansteigt.
D a v i d K. schrieb: > m.n. schrieb: > >> allerdings auch nicht. >> Die beiden PWM-Signale gehören an INA und INB. > > Ich bin ja für wirklich jede Hilfe dankbar, aber bist du dir da ganz > sicher? Um noch einmal auf die PWM-Ansteuerung zu kommen. Hier findest Du eine Schaltung, wie ich es Dir vorgeschlagen habe. Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" und etwas weiter unten (07.07.2015) das passende Programm, das bidirektionalen Betrieb per Poti ermöglicht. Dein Treiber ist ähnlich anzusteuern, wobei die obere PWM-Frequenz etwas niedriger liegt. Mit Deiner jetzigen Verdahtung (PWM nur an INB) kannst Du allerdings auch bidirektional arbeiten. Bei Richtungsumkehr müssen der Pegel von INA und das PWM-Signal invertiert werden (INA = 1 und OCR1B = PWM_MAX - pwm_wert).
m.n. schrieb: > Mit Deiner jetzigen Verdahtung (PWM nur an INB) kannst Du allerdings > auch bidirektional arbeiten. > Bei Richtungsumkehr müssen der Pegel von INA und das PWM-Signal > invertiert werden (INA = 1 und OCR1B = PWM_MAX - pwm_wert). Noch mal: An INA und INB gehört keine PWM bei dem hier verwendeten IC (VNH3SP30). INA und INB geben den Motorbetrieb vor (CW, CCW oder Brake to GND/VCC). Die Geschwindigkeit wird über den PWM-Pin des VNH3SP30 vorgegeben.
M. K. schrieb: > Die Geschwindigkeit wird über den PWM-Pin des VNH3SP30 > vorgegeben. Damit werden nur die unteren Treiber abgeschaltet. Mit Geschwindigkeit hat das nichts zu tun. M. K. schrieb: > Noch mal: Ich habe es zur Kenntnis genommen, und jetzt reicht es auch!
m.n. schrieb: > Damit werden nur die unteren Treiber abgeschaltet. Mit Geschwindigkeit > hat das nichts zu tun Also das Datenblatt "lügt" hier? Zitat von Seite 7: PWM Voltage controlled input pin with hysteresis, CMOS compatible. Gates of low side FETs are modulated by the PWM signal during their ON phase allowing speed control of the motor.
m.n. schrieb: > Aber was ist denn nun mit der Erwärmung und der eigentlichen > PWM-Ansteuerung? Darum würde ich mich doch zuerst kümmern. Ja, es wäre nett wenn mir Jemand noch Mal nahelegen könnte, was ich daheim zu messen und berechnen kann, um dieses Problem zu lösen. Und die Theorie in 2-3 Sätzen, damit ich es auch verstehe. m.n. schrieb: > Ich habe es zur Kenntnis genommen, und jetzt reicht es auch! Nein, bitte nicht. Die eine Aussage ist jene, die im Datenblatt nachzulesen/nachvollziehbar ist. Sofern die andere NICHT falsch sein sollte, bitte ich um eine Erklärung incl. Vor- und Nachteile. Vielleicht helfen ja Zeichnungen, damit ich folgen kann. Grüße Oekel
D a v i d K. schrieb: > Vielleicht helfen ja Zeichnungen, damit ich folgen kann. Du hast die Schaltung und den Motor. Nimm Dir fünf Minuten Zeit, um die Geschichte mit einer leicht veränderten Software zu testen. Dann weißt Du mehr.
Also wenn ich es nun richtig verstanden habe, muss ich später die Frequenz der Induktivität des Motors anspassen und/oder diese durch eine Drossel erweitern? Hab die Minimaländerungen noch Mal angehängt (Blockkondensatoren) und würde mich freuen, wenn der Eine oder Andere den Plan als "tauglich" befindet. (Oder mir noch Verbesserungen nennt) Danke Oekel
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.