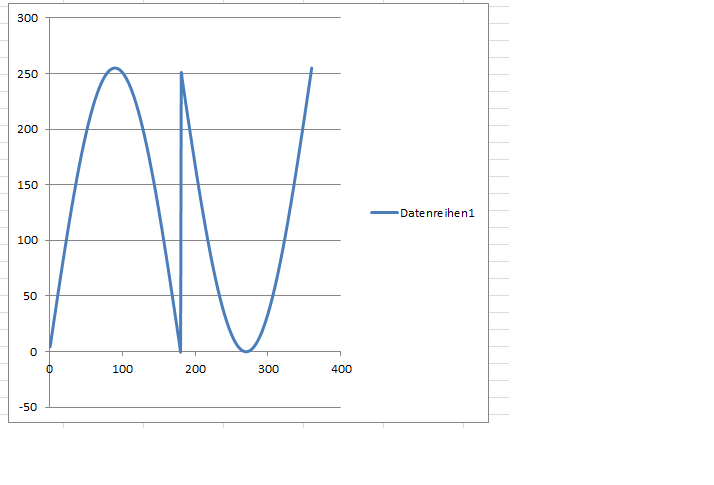
Hallo zusammen, ich habe einen Arduino und möchte mit diesem einen Sinus mittels PWM erzeugen. Dazu habe ich vor, die 360° des Sinus' mit einem Array von 360 Elementen abzubilden. In jedem Element des Arrays soll ein Wert zwischen 0 und 255 enthalten sein (8 bit -> AVR), was dann später dem Tastverhältnis (PWM) entsprechen soll. In Excel habe ich dazu mit der Sinusfunktion einen Wertebereich von 1°-360° berechnet und daraus dann die Werte zwischen 0 und 255 erzeugt. Allerdings scheint in meiner Wertetabelle etwas nicht stimmen...siehe Graphen. Mir kommt der Sprung von 180° auf 181° seltsam vor. Wisst ihr, wo das Problem liegen könnte? Vielen Dank schon mal! Grüße Andreas
Angehängte Dateien:
-

sinus.png
8,4 KB
Vergiss die 360 Grad. Falls irgendwas, dann den Kreis durch 256 teilen, das ergibt dann gerade einen Ringspeicher, der bei 8bit Ansteuerung rundrum laeuft. Wobei man dann eh nur 90 Grad davon abspeichern wuerde, die anderen Winkel ergeben sich durch Spiegelungen, Dh man benoetugt nur 64 Samples. Dh du musst nur 0- pi/2 durch 64 samples abbilden. Als Sin & Cos. Fuer einen BLDC die Clark & Park Transformation nicht vergessen.
Bei deiner berechnung fehlt der Negativ anteil. Dein AVR wird ebenfalls perse keine Negativen spannungen ausgeben können. Du musst also darauf achten ob du mit deiner Sinuserzeugung gerade in der negativen Sinus halbwelle bist oder nicht. Wenn du in der Negativen bist musst du dann vorkehrungen treffen dass die Werte negativ werden.
In deinem Fall is die Rechnung falsch. Du muss die ergebnisse durch 2 teilen und in der posiven Halbwelle zusätzlich 128 addieren
Andreas Berglich schrieb: > Wisst ihr, wo das Problem liegen könnte? Deine Wertetabelle lässt keine negativen Werte zu. Zeig doch mal wie du sie berechnet hast. rhf
Ok, Danke! Das mit den 64 Werten klingt logisch. Was ich nicht verstehe ist, warum ich den Kreis (360°) durch 256 teilen soll. Letztlich hätte ich einfach ein Array mit 360 Elementen erzeugt. Vielmehr würde mich interessieren, wie ich auf die Werte des "Negativbereichs" komme. Dass man mit 0 oder 1 keinen Negativbereich abbilden kann, ist mir klar. Aber wie kann ich es in meiner Wertetabelle berechnen? Danke!
Andreas Berglich schrieb: > Letztlich hätte ich einfach ein Array mit 360 Elementen erzeugt. Du solltest binär denken. Das macht es dem binären Rechner einfacher... > Vielmehr würde mich interessieren, wie ich auf die Werte des > "Negativbereichs" komme. Du ziehst von den Werten, die sprunghaft nach oben gehen, einfach 255 (oder eher 256) ab. Und wenn du für die Minimalwerte und Maximalwerte deines Sinus nur 1 Byte über hast, dann musst du ihn auf den Bereich -128..127 skalieren. Das pass als Zweierkomplement in ein Byte.
http://www.mikrocontroller.net/topic/goto_post/3098563 Beitrag "H-Bridge 50Hz Sinus - LC Filter dimensionieren" https://www.mikrocontroller.net/articles/DDS https://www.mikrocontroller.net/articles/Pulsweitenmodulation
> warum ich den Kreis (360°) durch 256 teilen soll. Letztlich hätte ich einfach
ein Array mit 360 Elementen erzeugt.
Die Anzahl : 360 Werte sind zufaellig. Es koennten auch 400 sein. Fuer
Neugrad. Oder sinnvollerweise eine Zweierpotenz, zB 256. Allenfalls
gehen auch 128. Oder es sollten besser 512 sein.
Angehängte Dateien:
-

DSC_0109.png
320 KB
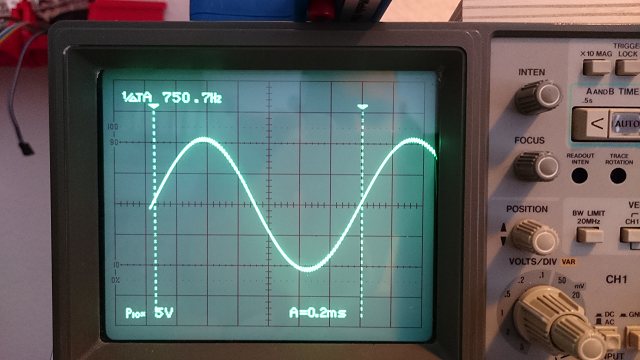
Hallo zusammen, so etwas habe ich auch schon gemacht. Du solltest Dein Array so bilden, dass die Grundwelle ohne Tonausgabe bei der Hälfte der PWM-Frequenz steht. Sprich: Dein Sinus hat bei Beginn einen Wert von 127, im positiven Maximum 254 und im negativen Maximum 0. Es ist richtig, dass man prinzipiell nur 90° des Sinus abbilden muss und sich den Rest durch rückwärts lesen und Verschiebung durch Addition bilden kann. Das verkompliziert den Code für den Anfang allerdings. Ich würde vorschlagen eine Sinustabelle mit 256 Werten zu nehmen, was einem Byte-Array von 256 Werten entspricht. Ein Timer steuert die PWM mit der maximalen Frequenz, um den Sinus durch Aliasing sauber hin zu bekommen, der zweite Timer inkrementiert den Pointer, der auf das aktuelle Arrayelement zeigt. Mit der Geschwindigkeit des 2. Timers steuerst Du die Frequenz. Auf jeden Fall benötigt man einen sehr guten Tiefpass mind. 3. oder besser 5. Ordnung hinter dem PWM-Ausgang, um das Signal von Oberwellen zu befreien. Ich empfehle dafür den AADE-Filterdesigner. Für große Induktivitäten kann man Entstördrosseln verwenden. Code kann ich im Moment nicht zeigen, aber ein Foto vom Scope. Mehr Infos zum Thema: http://forum.db3om.de/ftopic24353.html Viele Grüße! Sven
Sven L. schrieb: > Es ist richtig, dass man prinzipiell nur 90° des Sinus abbilden muss und > sich den Rest durch rückwärts lesen und Verschiebung durch Addition > bilden kann. Das verkompliziert den Code für den Anfang allerdings. Nicht, wenn man es schlau anstellt. Denn die Information, welcher Wert aus dem Viertelsinus zu werten ist, steht in den obersten beiden Bits. Dort habe ich das mal mit VHDL beschrieben: http://www.lothar-miller.de/s9y/archives/37-DDFS-mit-BROM.html Der Viertelsinus hat 64 Werte, und der Ausgabewert berechnet sich ausgehend von einem "Vollsinus" mit 256 Punkten (=index) in C etwa so:
1 | constant signed char viertelsinus[64] = { 0x02, 0x05, ... 0x7f } |
2 | unsigned char index; |
3 | signed char result |
4 | |
5 | if (index&0x40) result = viertelsinus[63-(index&0x3f)]; // rückwärts |
6 | else result = viertelsinus[ (index&0x3f)]; // vorwärts |
7 | |
8 | if (index&0x40) result = -result; // negieren |
Und wenn man mit "negativen Zahlen" nichts anfangen kann, dann muss man einfach nochmal alles um 128 nach oben verschieben...
http://www.daycounter.com/Calculators/Sine-Generator-Calculator.phtml Wertebereich und gewünschte Länge angeben, heraus kommt eine direkt für C geeignete Copy&Paste Tabelle. Geschweifte Klammern um das Ganze und der Tabelle einen Namen geben. Bei Bedarf noch PROGMEM oder andere Spässchen hinzufügen. Nicht vergessen, das letzte Komma zu entfernen.
@Lothar Miller (lkmiller) (Moderator) Benutzerseite >> Es ist richtig, dass man prinzipiell nur 90° des Sinus abbilden muss und >> sich den Rest durch rückwärts lesen und Verschiebung durch Addition >> bilden kann. Das verkompliziert den Code für den Anfang allerdings. Eben. >Nicht, wenn man es schlau anstellt. Denn die Information, welcher Wert >aus dem Viertelsinus zu werten ist, steht in den obersten beiden Bits. Lohnt sich das auf einem kleinen Controller? Was hat man eher übrig, Flash oder CPU-Leistung? >if (index&0x40) result = viertelsinus[63-(index&0x3f)]; // rückwärts >else result = viertelsinus[ (index&0x3f)]; // vorwärts >if (index&0x40) result = -result; // negieren Ein einfaches OCR1A = sinus[index]; ist da deutlich einfacher und schneller. Die paar hunder Bytes Speicher sind selten ein Problem.
Man kann auch am Anfang in der main() das Array mit sin(x) Werten füllen (Math.h) sofern man genug Speicherplatz hat. PWM Erzeugung dann (mit dem 8 Bit Timer): OCRx = 128 + sintable[n] wobei in sintable die Werte von +127 bis -127 stehen (in welchen Abstufungen musst du entscheiden, aber ein 256 Elemente Ringpuffer bietet sich an, sintable[n++] rotiert dich immer durch den Puffer durch). Am PWM Pin kommt dann ein Sinus mit DC-Offset raus, den packst du mit Koppelkondensator (hat Nullstelle bei DC) an einen Tiefpassfilter (Rekonstruktionsfilter) mit geeignetem Amplitudengang und fertig ist dein symmetrischer Sinus.
Matthias S. schrieb: > http://www.daycounter.com/Calculators/Sine-Generator-Calculator.phtml > > Wertebereich und gewünschte Länge angeben, heraus kommt eine direkt für > C geeignete Copy&Paste Tabelle. Aber eine nicht so besonder schlau gerundete mit zufälligem Offset. Das sollte man lieber MATLAB überlassen. Außerdem zeigt sich daß die Umsetzung auf eine PWM auch noch zu einem Fehler führt, den man in der Tabelle berücksichtigen sollte, um ihn zu minimieren.
Thomas U. schrieb: > Aber eine nicht so besonder schlau gerundete mit zufälligem Offset. > Das sollte man lieber MATLAB überlassen. Außerdem zeigt sich daß die > Umsetzung auf eine PWM auch noch zu einem Fehler führt, den man in der > Tabelle berücksichtigen sollte, um ihn zu minimieren. Ich fürchte nur, nach fast einem Jahr hat das kaum noch Relevanz.
Der link ist noch aktuell und die dort angebotenen Werte sind sicher die gleichen wie von vor einem Jahr. Und sie sind nicht sonderlich intelligent gerundet, als das sie Beispiel für eine gute Wertegeneration wären. Ist aber nett, dass Du aufpasst.
Thomas U. schrieb: > Matthias S. schrieb: >> http://www.daycounter.com/Calculators/Sine-Generator-Calculator.phtml >> >> Wertebereich und gewünschte Länge angeben, heraus kommt eine direkt für >> C geeignete Copy&Paste Tabelle. > > Aber eine nicht so besonder schlau gerundete mit zufälligem Offset. > Das sollte man lieber MATLAB überlassen. Außerdem zeigt sich daß die > Umsetzung auf eine PWM auch noch zu einem Fehler führt, den man in der > Tabelle berücksichtigen sollte, um ihn zu minimieren. Das ist ein Thema, das man doch besser im PWM-Modulator regeln sollte, weil die dafür nötige Vorverzerrung auf dessen Verhalten und Auflösung, sowie auch an das Folgesystem angepasst werden muss. In der Tabelle kann man das nur einbringen, wenn die Drehzahl und das Fehlerspektrum statisch sind und alles vorausberechnet werden kann - wenn der Modulator also stur geradeaus arbeitet und Linearität annimmt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.