Hallo zusammen, im Rahmen eines größeren Projektes habe ich einige Fragen, über die ich gerne diskutieren würde. Ich weiß, dass ähnliche Projekte hier im Forum bereits besprochen wurden, dennoch erhoffe ich mir etwas individuellere Antworten. Es geht um einen ferromagnetischen Schwebekörper, der durch eine Regelung in der Schwebe gehalten werden soll. Die Sensorik lasse ich zunächst außen vor. Ein Spulensystem bestehend aus zwei Spulen erzeugt die Kraft, die den Schwebekörper anzieht. Eine Spule soll mit konstantem Strom gespeist werden, sodass in gewissem Abstand bereits Kräftegleichgewicht zwischen Magnetkraft und Gravitationskraft herrscht. Die eigentliche Aktorik wird mit der zweiten Spule realisiert, die mit bipolarem Strom gespeist werden kann und somit das bereits bestehende Magnetfeld stärken bzw. schwächen kann. Der gesamte Versuchsaufbau ist bereits grob dimensioniert: Beide Spulen ca. 1000 Windungen und erwartete Ströme von maximal 2-3 A. Gewicht Schwebekörper 150-200g bei 4cm Durchmesser und Distanz zum Spulensystem in der Schwebe ca. 2cm. Weitere Informationen bei Bedarf. Nun zu meiner ersten Frage: Der Kern des Spulensystems soll wie der Schwebekörper einen Durchmesser von etwa 4cm besitzen. Die Spulen werden 'theoretisch' mit Gleichstrom gespeist, der bipolare Strom kann sich im Extremfall wie ein Wechselstrom mit geschätzter Frequenz 2 kHz verhalten. Welches Kernmaterial ist zu wählen? Bei einer groben FEM-Simulation scheint massives Eisen bzw. Stahl eine bessere Wahl zu sein als ein Kern aus weichmagnetischem Ferrit. Ist das richtig? Oder doch besser ein geblechter Kern oder Eisenpulverkern? Wo sind die Vorteile? Hat hier jemand bereits Erfahrungen und kann das abschätzen? Wo sind derartige Kerne erwerbbar? Ich freue mich auf Antworten und herzlichen Dank im Voraus. Liebe Grüße
Michael S. schrieb: > Die Sensorik lasse ich > zunächst außen vor. Wie schade. Die hätte mich am meisten interessiert :)
Michael S. schrieb: > sodass in gewissem Abstand bereits > Kräftegleichgewicht zwischen Magnetkraft und Gravitationskraft herrscht. Bist du dir darüber im Klaren, dass das ein INSTABILES Gleichgewicht ist? Georg
Georg schrieb: > Bist du dir darüber im Klaren, dass das ein INSTABILES Gleichgewicht > ist? Ja, das Earnshaw-Theorem ist mir bekannt, daher die zweite Spule zur Regelung.
Wie sind die zwei Spulen eigentlich geometrisch zueinander platziert? Wie groß wird der "Modulations-Hub" der variablen Spule in Etwa sein? Ist die Aufteilung in zwei Spulen eigentlich überhaupt sinnvoll? Wie wird mit der induktiven Rückwirkung der variablen auf die "feste" Spule umgegangen? Warum nicht gleich statt der festen Spule Dauermagnete einsetzen?
Md M. schrieb: > Michael S. schrieb: >> Die Sensorik lasse ich >> zunächst außen vor. > > Wie schade. Die hätte mich am meisten interessiert :) Siehe mal den Beitrag "Re: Magnet Versuch"
Das Verfahren ist nicht so furchtbar neu, und schon an vielen Stellen beschrieben, z.B.: http://www.rubotherm.de/magnetschwebewaage-rubotherm.html Ferrite haben eine vergleichsweise geringe Sättigungsmagnetisierung, und vielleicht musst du dir auch Gedanken über die Temperaturkoeffizienten der diversen Materialien machen.
Anstatt einer Spule für das Dauerfeld nimmt man eher einen Permanentmagnet. Der wird im Betrieb nicht warm. Man braucht dann nur noch einen E-Magneten, der das Permanetfeld schwächt oder stärkt. Das spart viel Strom.
Hp M. schrieb: > Ferrite haben eine vergleichsweise geringe Sättigungsmagnetisierung, und > vielleicht musst du dir auch Gedanken über die Temperaturkoeffizienten > der diversen Materialien machen. Daher die konkrete Frage nach eurer Einschätzung: Gehe ich recht in der Annahme, dass Eisen oder Stahl für diese grob umrissenen Abmessungen, Ströme, Windungszahlen etc. vermutlich besser geeignet ist als weichmagnetisches Ferrit? Die gesamte Anordnung soll mit einem Lüfter aktiv gekühlt werden. Stefan M. schrieb: > Anstatt einer Spule für das Dauerfeld nimmt man eher einen > Permanentmagnet. Der wird im Betrieb nicht warm. Man braucht dann nur > noch einen E-Magneten, der das Permanetfeld schwächt oder stärkt. Das > spart viel Strom. Das Problem ist die praktische Realisierung. Trotz Permenentmagneten benötige ich einen (Eisen-)Kern für die steuernde Spule. Der Permanentmagnet müsste dann oberhalb der Spule mit Kern angebracht werden und wegen weitem Abstand zum Schwebekörper sehr stark sein oder unterhalb, wodurch sich die Distanz zwischen Schwebekörper und Spule von 2 cm verringert bzw. nicht mehr einhalten lässt. Oder kennst du eine alternative Anordnung, die funktioniert?
Mein Leistungselektronik Prof hatte am Transrapid mit gearbeitet und später über Jahre Diplomarbeiten zum Thema "Schwebende Eisenkugel" ausgegeben. Das letzte Stadium, das ich gesehen habe, war eine Drehstromspeisung des Hubmagneten mit über 10A pro Phase. Schade, dass ich keine Fotos aus der Zeit habe. Wichtig war - erst Kühlung an, dann Strom. Man stelle sich einfach eine Standard Kugelstoß-Kugel (7,257kg) vor, die gute 10cm unter dem Magneten hängt. :) Der eigentliche Aha-Effekt war aber die Regelungsqualität bei gleicher maximaler Stellleistung, je nach Algorithmus ( PID, Fuzzy, Zustandsregler ). Mich hat damals fasziniert, wie einem der Zustandsregler die Kugel aus der Hand genommen hat und das Teil dann einfach bocksteif im Feld hing - ein echter Siemens Lufthaken. Wichtig ist, dass Du ordentlich Rechenleistung für die Regelung bereitstellst. Mit einem Raspberry Pi 3 wird das wohl schon eng werden... http://harerod.de/applications_ger.html#xmasball2012
Lothar M. schrieb: > Md M. schrieb: >> Michael S. schrieb: >>> Die Sensorik lasse ich >>> zunächst außen vor. >> >> Wie schade. Die hätte mich am meisten interessiert :) > Siehe mal den Beitrag "Re: Magnet Versuch" Lothar, verarsch mich nicht :) . Den Beitrag habe ich geschrieben. Mich interessiert die Sensorik und das feedback system aus einem bestimmten Grund. Undzwar wird in bestimmten Magnetschwebebahn-Typen eine Kombination aus Spaltsensor und einem Beschleunigungssensor verwendet. Diese beiden Signale werden dann mit einem frequenzbasiertem Komplementärfilter fusioniert. Sinn und Zweck des ganzen ist ein Kompromiss aus Stabilität und Fahrkomfort. Für soetwas interessiere ich mich. Ich benutze in einem Projekt z.B. statt der Beschleunigung eine Geschwindigkeitsmessung über den optischen flow. Siehe dazu z.B. Beitrag "Re: Magnetfeld kontrollieren um Kugel zu bewegen (Kunstprojekt)" und ein paar nachfolgende Beiträge.
Sorry, diesen Beitrag hatte ich übersehen: Christian schrieb: > Wie sind die zwei Spulen eigentlich geometrisch zueinander platziert? > Wie groß wird der "Modulations-Hub" der variablen Spule in Etwa sein? > Ist die Aufteilung in zwei Spulen eigentlich überhaupt sinnvoll? Wie > wird mit der induktiven Rückwirkung der variablen auf die "feste" Spule > umgegangen? Warum nicht gleich statt der festen Spule Dauermagnete > einsetzen? Die "feste" Spule wird direkt auf den Kern gewickelt und darauf dann die "variable" Spule. Die Ströme beider Spulen betragen maximal etwa 3 A. Der Körper soll jedoch im Normalbetrieb etwa im Gleichgewichtspunkt ohne besondere äußere Einflüsse geregelt werden, der Steuerstrom weist dann nur geringe Schwankungen auf. Der genaue Ort des Gleichgewichtspunktes, sowie eine Abweichung davon um +-1cm sollen durch die Ströme in beiden Spulen eingestellt werden können, daher ist momentan kein Permanentmagnet anstatt der ersten Spule denkbar.
Die Kombination mit 2 Spulen kann man machen, ob es wirklich sinnvoll ist würde ich bezweifeln. Von den Verlusten her wäre es günstiger nur eine Spule zu nutzen - das vereinfacht auch die Ausgangsstufe, da man in einem Quadranten bleibt. Ein Permanent-magnet wäre auch möglich, etwa an der Oberseite des Kerns. Es kommt nicht auf den Abstand zum Schwebekörper an, sondern wie der Magentische Kreis aussieht. Welcher Teil des Kerns vormagnetisiert ist, ist weitgehend egal. Zum einstellen des Abstandes hat man immer noch die Spule. Abgleichen könnte man ggf. auch über die Form/Größe des Kerns, also etwa ein Stück Blech mehr oder weniger. Ein größerer Massiver Kern erzeugt zusätzliche Wirbelströme, die eher stabilisierend wirken sollten. Allerdings verlangsamen die auch die Regelung. Bei der Endstufe sollte es entsprechend eher besser sein die Spannung vorzugeben - was auch für nur eine Spule spricht. Langsame Drift wie Temperatureffekte gleicht die Regelung mit aus. Im Vergleich zur Spule um den Kern sollten Wirbelströme im Eisen eher klein sein. Ein geblechter Kern sollte also keinen so großen Unterschied machen, ist aber ggf einfache zu bekommen (z.B. Teil eine Transformators).
Den Nachteil von zwei Spulen habe ich noch gar nicht so richtig verstanden. Falls die Kopplung beider Spulen ein Problem werden sollte, könnte man die "Konstantspule" doch einfach über eine einstellbare Konstantstromquelle bestromen. Oder falls möglich die beiden Geschichten einfach trennen und auf verschiedene Kerne Wickeln. Z.B. drei "Konstantspulen" im Kreis und eine zum Regeln in der Mitte. Weiterhin sehe da sogar einen Vorteil, man könnte nämlich dann zum Regeln eine Spule mit weniger Windungen aber höherem Strom nehmen. Das Würde die Regelung verbessern. Denke ich hier falsch?
Auch wenn die Spulen auf getrennten Teilen des Kerns sind, werden die Spulen magnetisch gekoppelt. Man könnte die Spule für einen konstanten Hintergrund mit einer Konstantstromquelle speisen - man bracht dann aber Spannungsreserve um Feldänderungen der anderen Spule auszugleichen. Auch fällt die eher dämpfende Wirkung über Wirbelströme weg - ich weiß allerdings nicht ob die überhaupt signifikant ist. Getrennte Kerne dürfte schwierig sein, denn man will einen relativ hohe Feld-Gradienten an der Stelle des Schwebekörpers. Mehrere Magneten sind dafür eher kontraproduktive. Auch werden Elektromagneten wie Trafos mit der Größe besser. Ob die Spule jetzt wenige Dicke oder viele dünne Windungen hat macht für den Magneten selber keinen unterschied. Es ist nur eine Frage für die Treiber-stufe. Um das Feld genügend schnell zu ändern braucht man halt etwas Spannung als Reserve. Wenn eine 2. Spule, dann ggf. als Teil der Endstufe, mit einer Induktivität in Reihe für den Konstantstrom-anteil. Eigentlich spricht nichts gegen eine Spule die sowohl den Hintergrund als auch den zu regelnden Hintergrund liefert. Die Frequenzen werden noch nicht so hoch sein, dass es sich lohnt das extra Treiber zu nutzen - das kommt erst wenn man in den >100 kHz Bereich kommt. Die Abwärme wird mit einer Spule kleiner.
Angehängte Dateien:
-

Eleketrometerverstaerker.PNG
9,6 KB -

OPV_MOSFET_working.PNG
10 KB -

Invertierender_Stromregler.PNG
5,1 KB
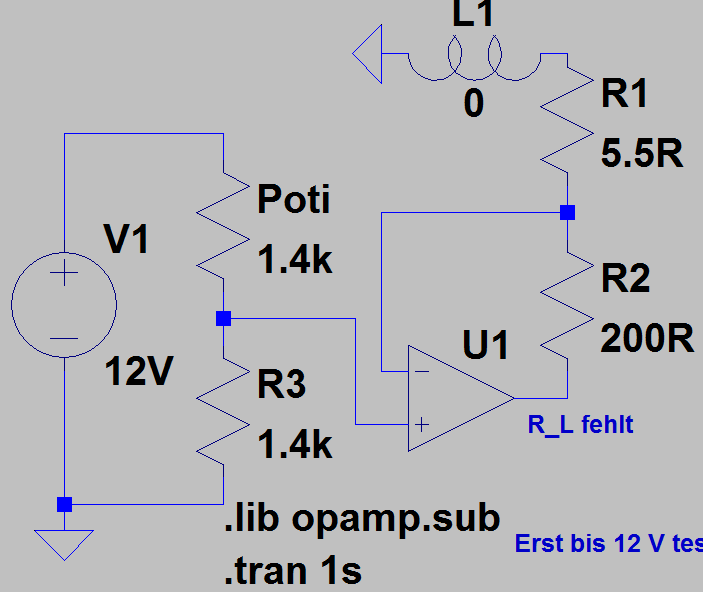
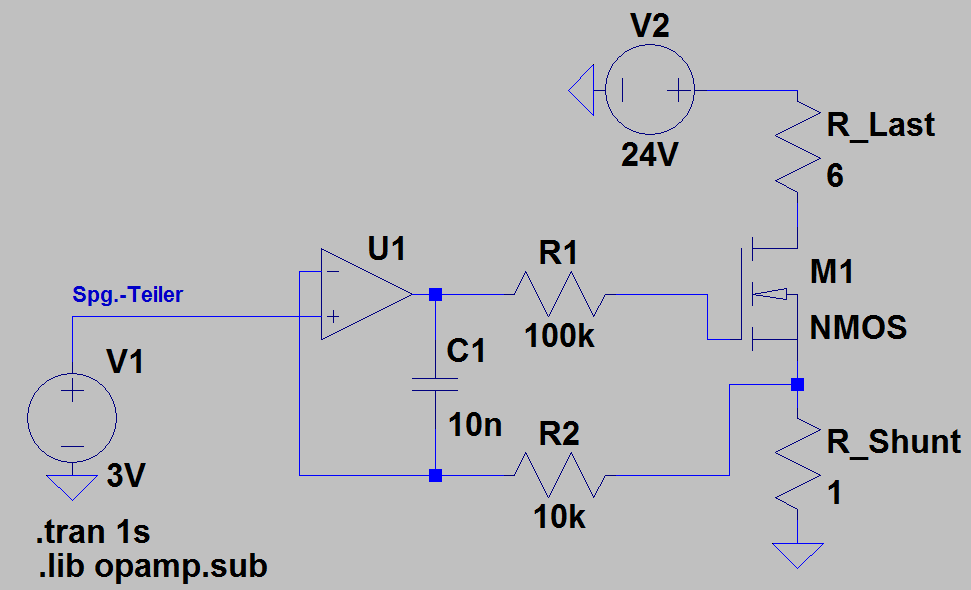
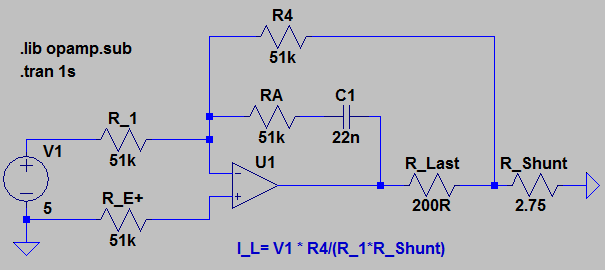
Hallo nochmals, erst einmal möchte ich mich bei allen für eure Hilfe und die vielen Beiträge bedanken! Ich tendiere momentan zu einem Kern aus weichmagnetischem Eisen, allerdings weiß ich noch nicht, woher man so etwas am einfachsten und günstigsten bekommt. Irgendwelche Vorschläge? Ein weiterer Punkt, wo ich gerne verschiedene Meinungen einfangen würde, betrifft die Stromspeisung der Spulen. Nach meiner Recherche und Einarbeit in die Thematik habe ich einige kleine Simulationen durchgeführt. Für die "feste" Spule stelle ich mir eine über einen Spannungsteiler einstellbare Konstantstromquelle mit OPV und MOSFET, wie im Anhang eingefügt, vor. Alternativ ginge eventuell auch ein einfacher Elektrometerverstärker als Konstantstromquelle - ohne MOSFET. Etwas schwieriger wird es denke ich bei der "variablen" Spule. Hier würde ich zum "invertierenden Stromregler mit Shunt-Widerstand" tendieren, der ebenfalls im Anhang eingefügt ist. Die eigentliche Regelung findet übergeordnet, z. B. mit MATLAB, statt. Auch dieser soll mit einem Spannungsteiler die Höhe des Ausgangsstromes einstellen können. Was meint ihr? Bin ich prinzipiell auf dem richtigen Weg? Ist der invertierende Stromregler mit Shunt von der Performance gut genug oder sind kompliziertere Schaltungen ˈa ˈla Howland-Strompumpe notwendig? Die Maximalströme beider Spulen sind wie gesagt etwa 3A. Ein erster Aufbau mit 200 Ohm Lastwiderstand funktionierte bereits recht gut. Die Simulationsparameter sind sicherlich noch optimierbar.
Michael S. schrieb: > Ich tendiere momentan zu einem Kern aus weichmagnetischem Eisen, > allerdings weiß ich noch nicht, woher man so etwas am einfachsten und > günstigsten bekommt. Irgendwelche Vorschläge? Hol dir einen Mikrowellenherd vom Sperrmüll und säge aus dem lamellierten Eisenkern des Hochspannungstrafos ein passendes Stück heraus. Evtl. musst du den Kern vorher lackieren, damit er beim Sägen nicht in einelne Bleche zerfällt. Das Magnetron kannst du auch leicht ausbauen und zerlegen und dabei zwei kräftige Ferrit-Ringmagneten gewinnen.
Michael S. schrieb: > Etwas > schwieriger wird es denke ich bei der "variablen" Spule. Hier würde ich > zum "invertierenden Stromregler mit Shunt-Widerstand" tendieren, der > ebenfalls im Anhang eingefügt ist. Keine Kritik, nur aus Neugierde: Warum kein einfacher Chopper mit PWM?
Md M. schrieb: > Michael S. schrieb: >> Etwas >> schwieriger wird es denke ich bei der "variablen" Spule. Hier würde ich >> zum "invertierenden Stromregler mit Shunt-Widerstand" tendieren, der >> ebenfalls im Anhang eingefügt ist. > > Keine Kritik, nur aus Neugierde: Warum kein einfacher Chopper mit PWM? Der Sensorik-Part verwendet zwar einen Mikrocontroller, der auch einen PWM-Ausgang zur Verfügung hätte, das Stellsignal kommt aber von einer Datenverarbeitungskarte in einem PC in Höhe von -10...10V DC. Diese Spannung soll in der Stromquelle direkt in z. B. -3...3 A umgewandelt werden.
Für die Stromquelle reicht eigentlich die einfache Version mit MOSFET und Widerstand am Source. Der "Nachteil" ist allerdings, dass dies nur Strom einer Polarität liefert - mit nur einer Spule reicht das aber auch aus. Die Geschwindigkeit mit sich das Magnetfeld ändern kann ist allerdings auch begrenzt, weil die Spannung nicht die Polarität wechseln kann. Die Frage wäre eher ob man die Spule als Strom oder Spannung ansteuert, man muss ja nicht unbedingt den Strom direkt vorgeben. Bis zu einer gewissen Frequenz kann man auch die Spannung vorgeben um ungefähr den Strom einzustellen. Dinge wie thermische Drift sind so langsam, dass es mit der Positionsregelung ausgeglichen wird, ohne dass es stört. Als Kern könnte ein Teil eines alten Trafos (wohl bevorzugt EI Kern) dienen. So rein aus Bauch raus würde ich etwas mehr als eine T Form stehen lassen, also etwa die Hälfte des äußeren Teils wegschneiden. Mit etwa Glück kann auch noch den Wickelkörper weiter verwenden.
Angehängte Dateien:
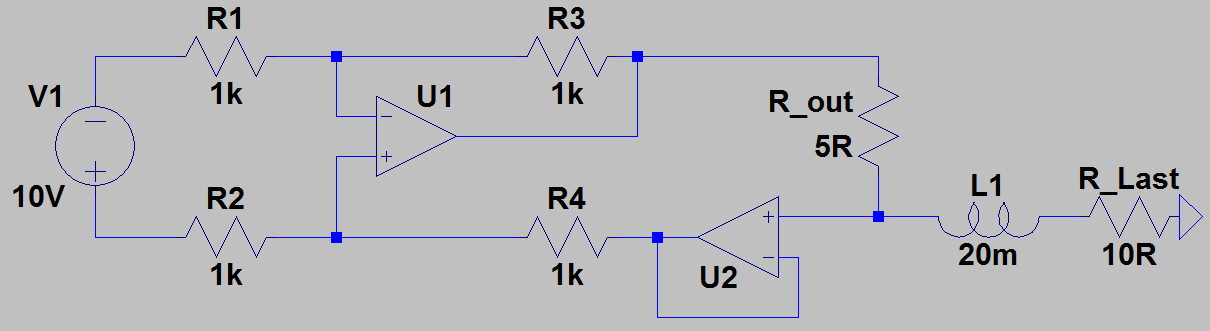
Lurchi schrieb: > Für die Stromquelle reicht eigentlich die einfache Version mit MOSFET > und Widerstand am Source. Der "Nachteil" ist allerdings, dass dies nur > Strom einer Polarität liefert - mit nur einer Spule reicht das aber auch > aus. Die Geschwindigkeit mit sich das Magnetfeld ändern kann ist > allerdings auch begrenzt, weil die Spannung nicht die Polarität wechseln > kann. > > Die Frage wäre eher ob man die Spule als Strom oder Spannung ansteuert, > man muss ja nicht unbedingt den Strom direkt vorgeben. Danke für deine Einschätzung bzgl. der Konstantstromquelle. Das Prinzip steht aus verschiedenen Gründen bereits ziemlich fest: Es gibt definitiv zwei Spulen, die beide mit einstellbarem Strom gespeist werden. Die erste mit einem konstantem Strom, der im Betrieb nicht verändert wird und nur die "Hilfskraft" erzeugt. Die zweite Spule regelt den Körper um den entstandenen (labilen) Gleichgewichtspunkt mit einem bipolaren Strom. Eignet sich hierfür der invertierende Stromregler? Ansonsten scheint auch im Anhang eingefügte Schaltung in der Simulation recht vielversprechend. Dabei handelt es sich anscheinend um eine Art Howland-Strompumpe. Allerdings benötige ich hier bereits zwei Leistungs-OPVs, oder kann der Untere durch einen Standard-OPV ersetzt werden?
Ich habe so etwas schon gebaut, allerdings nur mit einer einzigen Spule. Ich gebe zu bedenken, daß es auch bei der besten Regelung dazu kommen kann, daß der Schwebekörper nach oben zum Magneten gezogen wird. Obwohl in meiner Anwendung der Strom komplett abgschaltet wird, bleibt der Schwebekörper wegen des Restmagnetismus des geblechten Kerns dauerhaft hängen. Man braucht keinen starken Magneten wenn sich die Teile berühren. Im Fall von zwei Spulen muß in diesem Fall das permanente Magnetfeld exakt aufgehoben werden, was ich für schwierig halte. Eine analoge Ansteuerung ist eine schöne Wärmequelle. In meiner Anwendung habe ich eine PWM und einen MOSFET benutzt. Da wird außer der Magnetspule nichts warm. Und das ist auch gut so. Man muß ja nicht unnötig an mehreren Fronten kämpfen. Mehr unter http://www.familie-morbach.de/elektronik/levitation/levitation.html
Morri schrieb: > Ich habe so etwas schon gebaut, allerdings nur mit einer einzigen Spule. > Ich gebe zu bedenken, daß es auch bei der besten Regelung dazu kommen > kann, daß der Schwebekörper nach oben zum Magneten gezogen wird. Obwohl > in meiner Anwendung der Strom komplett abgschaltet wird, bleibt der > Schwebekörper wegen des Restmagnetismus des geblechten Kerns dauerhaft > hängen. Da hätte vielleicht eine H-Brücke besser funktioniert, wenn du ohenhin PWM benutzt. > Eine analoge Ansteuerung ist eine schöne Wärmequelle. In meiner > Anwendung habe ich eine PWM und einen MOSFET benutzt. Da wird außer der > Magnetspule nichts warm. Und das ist auch gut so. Man muß ja nicht > unnötig an mehreren Fronten kämpfen. Du hast aber auch mit einem Lichtsensor gearbeitet. Bei Hallsensoren z.B. sieht das u.U. schon anders aus. Bei zu niedriger PWM-Frequenz steigt womöglich der Aufwand, weil man eventuell das sampling mit der PWM-Frequenz synchronisieren muss, um nicht mal bei abgeschalteter und mal bei bestromter Spule zu messen. Wenn man statt dessen die PWM-Frequenz erhöht, hat man vielleicht wieder Schaltverluste oder einen aufwändigen Treiber nötig. Ganz ohne Nachteil gehts halt nicht.
Michael S. schrieb: > Ansonsten scheint auch im Anhang eingefügte Schaltung > in der Simulation recht vielversprechend. raeusper > Dabei handelt es sich anscheinend um eine Art > Howland-Strompumpe. Ja. > Allerdings benötige ich hier bereits zwei Leistungs-OPVs, > oder kann der Untere durch einen Standard-OPV ersetzt > werden? Ja - der muss ja keinen Laststrom liefern. Ich fuer meinen Teil wuerde auch unter Androhung von Waffengewalt keine Howland-Quelle einsetzen; das ist eine Schaltung mit Mitkopplung, die daher zu wunderbaren Schwingungen in der Lage ist... Es muss problemlos moeglich sein, eine bipolare Stromquelle als Vollbruecke auszufuehren. Highside zwei Schalter fuer die Spannung (werden durch das Vorzeichen gesteuert); unten zwei gleichartige Stromsenken (werden durch den Betrag gesteuert). Halbbruecke geht auch, aber da ist die Heizung inclusive...
Morri schrieb: > Mehr unter > http://www.familie-morbach.de/elektronik/levitation/levitation.html Schöne Seite und schönes Projekt, gefällt mir gut. Ich habe auch vor mir privat eine Version zu bauen, bei der der Strom durch eine Spule über MOSFET nur an/ausgeschaltet wird - ohne Mikrocontroller. Dieses Projekt verfolgt allerdings einen anderen Zweck: Der Aufbau stellt ein linearisiertes Sensorsignal zur Verfügung und erhält das Stellsignal von 'extern'. Die Regelung findet z. B. auf einem Rechner statt. Hier sollen verschiedene Reglerstrukturen getesten werden können. Possetitjel schrieb: > Es muss problemlos moeglich sein, eine bipolare Stromquelle > als Vollbruecke auszufuehren. Highside zwei Schalter fuer > die Spannung (werden durch das Vorzeichen gesteuert); unten > zwei gleichartige Stromsenken (werden durch den Betrag > gesteuert). Das Stellsignal im Bereich -10...+10V DC ist nicht belastbar und kann quasi keinen Strom liefern. Von daher kann ich mir nicht genau vorstellen, was du meinst. Der Strom muss ja irgendwie 'erzeugt' werden, z. B. mit Leistungs-OPV (bzw. dessen Versorgung, vermutlich Linearnetzteil). Ich benötigte sozusagen eine Schaltung die -10...+10V in -3...+3A umwandelt, geht das nicht einfacher als über eine Brückenschaltung?
Angehängte Dateien:
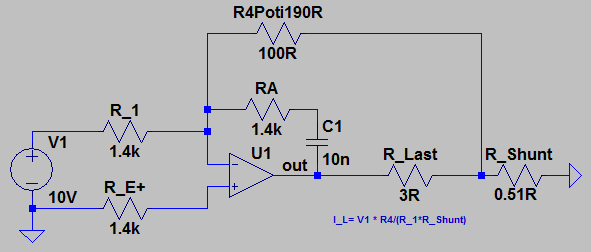
Hallo nochmals, ich hoffe, dass hier noch jemand mit liest und ersuche erneut um Hilfe. Zunächst einmal zum momentanen Stand: Ein erster Prototyp wurde nun aufgebaut. Als Kernmaterial dienten passend gesägte M-Trafobleche, die mit 2K-Kleber verklebt wurden. Der Kern ist quaderförmig, die darauf gewickelten Spulen besitzen einen Gleichstromwiderstand von 3 Ohm und 10 Ohm. Die 10 Ohm Spule wird mit der OPV + NMOS Stromquelle betrieben. Dies funktioniert sehr gut, jedoch wird bei einer Versorgungsspannung von 15V ein maximaler Strom von lediglich 15V/10 Ohm erreicht. Diese Spule soll mit einem oder mehreren Neodym-Permanentmagneten "geboostet" werden, um den Strom niedrig zu halten. Sie dient im Prinzip nur zur Einstellung des (labilen) Gleichgewichtspunktes. Die Regelung erfolgt mit der 3 Ohm Spule. Hierfür ist der invertierende Stromregler, wie im Anhang dargestellt, angedacht. Die Schaltung funktioniert grundsätzlich, es ergibt sich jedoch folgendes Problem: Sobald R4 den Wert 100 Ohm erreicht, steigt der Strom durch die Last nicht mehr wie gewünscht an, sondern bleibt konstant. Dies geschieht, obwohl die Ausgangsspannung des OPVs noch weit unterhalb seiner Versorgungsspannung liegt, und ich weiß nicht warum. Ich benötige einen Strom bis etwa 3A. Der Leistungs-OPV wird momentan noch mit einem 12V PC-Netzteil betrieben, das durch ein bipolares 15V-Netzteil ersetzt werden soll. Beim OPV handelt es sich um den OPA541 von TI. Weiß jemand woran es liegt? Wie erreiche ich einen höheren Strom? Irgendwelche Dimensionierungsfehler? Oder bleibt nichts anderes übrig, als auf höhere Versorgungsspannung zu wechseln? Danke im Voraus und viele Grüße PS: Sorry für den doppelten Anhang, kann man das auch irgendwie wieder entfernen...?
Soweit ich das feststellen kann, schwingt der Ausgang des OPVs zwar, aber nur im Rahmen der nicht ganz glatten Versorgungsspannung. Komisch ist, dass die Ausgangsspannung am OPV 5V nicht überschreitet. Kann es sein, dass es an dem im Datenblatt erwähnten "Output Voltage Swing" liegt? Wenn ich es richtig verstehe, kann der OPV dann nicht beide Versorgungsspannungen 'voll ausfahren'. Wenn ich von einer Versorgung von etwa 11V ausgehe, lande ich mit dem minimalen Wert aus dem Datenblatt bei 11V-5,5V=5,5V. Falls es wirklich daran liegt, bleibt die Frage: Wie kann man dem entgegen wirken? Woran kann es sonst liegen? Zu erwähnen ist auch: Am PC Netzteil ist eine zusätzliche Last (Glühbirne) an +12V angeschlossen. Wenn ich die Glühbirne entferne, schaltet sich das Netzteil bei Aktivierung der Steuerspannung V1 ab.
Kann mir jemand sagen, wie sich die Verstärkung in obiger Schaltung ergibt? Der Verstärker verträgt keine Verstärkungen kleiner 1, vielleicht liegt es daran.
Michael S. schrieb: > Beim OPV handelt es sich um den OPA541 von TI. Hast du dessen Datenblatt schon mal studiert? Da steht etwas von "programmable current limit". Solange du das IC nicht richtig beschaltest, wirst du nicht viel Freude damit haben.
Da mein Strom ja (zunächst) möglichst hoch sein soll, habe ich den "current sensing pin" nicht beschaltet, um den maximalen Strom zu erhalten. Aus dem Datenblatt ist mir auch nicht ersichtlich, ob das wirklich notwendig ist. Man bräuchte für 5A ja dann einen 0,1 Ohm Hochlastwiderstand, was ich gerne vermeiden würde. Über zielführende Hilfe wäre ich dankbar.
Hallo :-) Schönes Projekt! > Oder doch besser ein geblechter Kern oder Eisenpulverkern? [EDIT: Sehe grade das du das eh schon vorhast] Du könntest auch einen Permanentmagneten als Kern der Spule nutzen. Du brauchst dann nur noch Strom für den Regelanteil. Ich habe das mal ausprobiert und bin auf 11cm Abstand gekommen. Der Strom durch die Spule war nur 0,5A groß. Das klappt also sehr gut. Einziger Nachteil: Der Regelbereich liegt in einem relativ kleinen Raumbereich (so um die 0,5 bis 1mm). Man muss also eine ruhige Hand haben, wenn man das Objek dort plaziert. Man kann den Regelbereich natürlich vergrößern, wenn man mehr Strom spendiert. Allerdings gilt zu bedenken, dass ein Permanentmagnet gesättigt ist. Noch ein Tip: Nutze eine Vollbrücke. Somit kannst du das Feld in beide Richtungen aussteuern und erhältst einen größeren Regelbereich. Ich habe das Projekt hier mal vorgestellt (ev. ist es eine Anregung für dich): Beitrag "Projekt Schwebende Kugel (Ziel: große Entfernung zum Magneten und wenig Stromverbauch)" Viele Grüße! J.O
Jonny O. schrieb: > Ich habe das mal > ausprobiert und bin auf 11cm Abstand gekommen. Der Strom durch die Spule > war nur 0,5A groß. Also wurde der signifikante Teil der Anziehung vom Permanentmagneten aufgebracht. Wie sieht denn ein Magnet aus, der in 11cm Entfernung noch eine so große Kraft aufbringt? Jonny O. schrieb: > Ich habe das Projekt hier mal vorgestellt (ev. ist es eine Anregung für > dich): > > Beitrag "Projekt Schwebende Kugel (Ziel: große Entfernung zum Magneten > und wenig Stromverbauch)" Das ist kein Projekt, das ist zweimal delitantische Computergrafik + zweimal "Fotos aus Ali/Bucht gemopst".
Jonny O. schrieb: > Du könntest auch einen Permanentmagneten als Kern der Spule nutzen. Du > brauchst dann nur noch Strom für den Regelanteil. Ich habe das mal > ausprobiert Da bist du nicht der erste. Und vorgeschlagen wurde das in dem thread auch schon. Strg+F "Permanentmagnet". Jonny O. schrieb: > Noch ein Tip: Nutze eine Vollbrücke. Somit kannst du das Feld in beide > Richtungen aussteuern Du solltest den thread lesen, denn auch das wurde schon vorgeschlagen. Md M. schrieb: > Morri schrieb: >> Ich habe so etwas schon gebaut, allerdings nur mit einer einzigen Spule. >> Ich gebe zu bedenken, daß es auch bei der besten Regelung dazu kommen >> kann, daß der Schwebekörper nach oben zum Magneten gezogen wird. Obwohl >> in meiner Anwendung der Strom komplett abgschaltet wird, bleibt der >> Schwebekörper wegen des Restmagnetismus des geblechten Kerns dauerhaft >> hängen. > > Da hätte vielleicht eine H-Brücke besser funktioniert, wenn du ohenhin > PWM benutzt. Spielt aber keine Rolle, da OP schon genau weiß, was er will. Michael S. schrieb: > Der Sensorik-Part verwendet zwar einen Mikrocontroller, der auch einen > PWM-Ausgang zur Verfügung hätte, das Stellsignal kommt aber von einer > Datenverarbeitungskarte in einem PC in Höhe von -10...10V DC. Diese > Spannung soll in der Stromquelle direkt in z. B. -3...3 A umgewandelt > werden.
Angehängte Dateien:
-

L298_Vollbruecke.jpg
96 KB
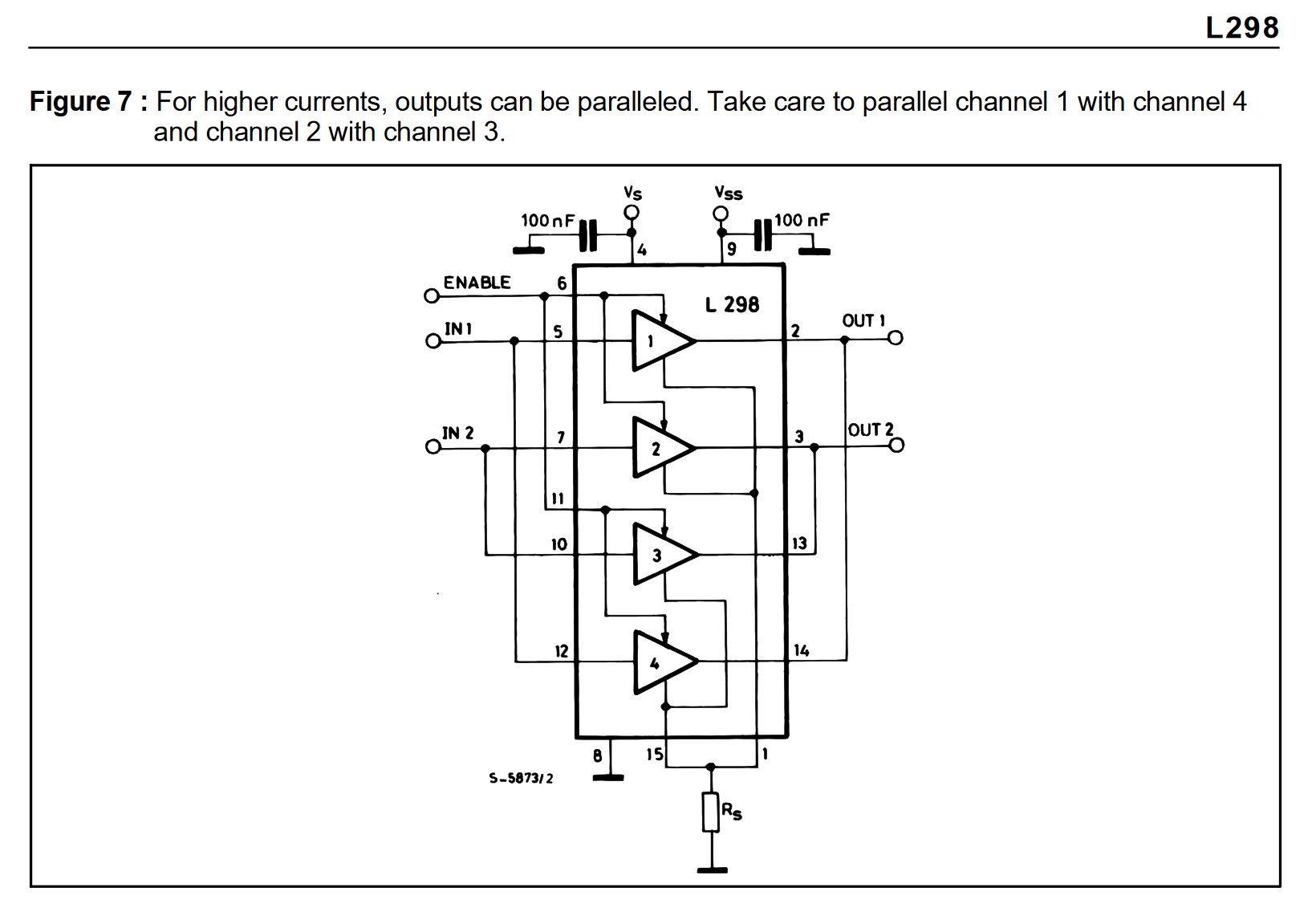
Hi urigeller, > Also wurde der signifikante Teil der Anziehung vom Permanentmagneten > aufgebracht. Das ist ja das Prinzip dahinter. Die Höhe des Stromes hängt praktisch nur davon ab, wie genau die Lichtschranke (oder andere Sensorik wie Hallsensor) auf den Punkt ausgerichtet ist, bei welchem das Objekt für einen sehr kurzen Zeitpunkt auch ohne Reglung (instabil) schweben würde. Je näher man bei diesem Punkt liegt, desto geringer der Strom. > Wie sieht denn ein Magnet aus, der in 11cm Entfernung noch > eine so große Kraft aufbringt? Jeder größere Neodymmagnet sollte ausreichen. Ich habe einen Scheibenmagnet genutzt (Ø 45 mm, Höhe 30 mm) Typ S-45-30-N Datenblatt: https://www.supermagnete.de/data_sheet_S-45-30-N.pdf Allerdings sollte man vorsichtig damit umgehen. Bei der Einstellung der Reglung ist mir die Neodymkugel mehrmals unten gegen den Magneten geklatscht. Die Kräfte die dabei freiwerden sind nicht zu unterschätzen ^^ Darum sollte man einen kleinen Abstandshalter unter dem Magneten anbringen. > Fotos aus Ali/Bucht gemopst Ertappt :-(. Die Bilder sind nur als Hinweis zu verstehen, dass günstige Chinamodule (Vollbrücke + µC) ausreichend sind. Aus mehr als diesen zwei Platinchen + Laser + Fototransistor besteht die Elektronik dann auch nicht. Natürlich noch ein paar Käbelchen um sie zu verbinden. Prinzipiell ist die Elektronik ein ganz einfacher PD-Regler. Bei Interesse mache ich ein Foto vom Aufbau... :-) > Du solltest den thread lesen Das ist mir wenige Sekunden nach dem Absenden auch aufgefallen. :-( STR+F "EDIT" Grüße!
Md M. schrieb: > Spielt aber keine Rolle, da OP schon genau weiß, was er will. > > Michael S. schrieb: >> Der Sensorik-Part verwendet zwar einen Mikrocontroller, der auch einen >> PWM-Ausgang zur Verfügung hätte, das Stellsignal kommt aber von einer >> Datenverarbeitungskarte in einem PC in Höhe von -10...10V DC. Diese >> Spannung soll in der Stromquelle direkt in z. B. -3...3 A umgewandelt >> werden. Und genau hierfür suche ich momentan eine gute Lösung. Mein "invertierender Stromregler" funktioniert zwar grundsätzlich, jedoch teilweise unzuverlässig und der Ausgangsstrom ist aus irgendeinem Grund nicht so hoch wie er sein sollte (siehe letzter Beitrag). Es wäre schön, wenn jemand eine Vermutung hat, woran es liegen könnte oder mir eine anderes Schaltungsprinzip mit derselben Funktion vorschlagen kann. Womöglich ist auch einfach nur der Leistungs-OPV kaputt...
Da man sowieso eine Überlagerung von DC Feld und einem eher kleinen Steuerstrom benötigt, macht es wenig Sinn den Steuerstrom für beide Richtungen vorzusehen. Eine Stromregelung für 1 - 7 A ist deutlich einfacher als eine für -3 A bis 3 A. Die Aufteilung in eine Spule für den DC Teil und einen Regelteil macht auch keinen Sinn - es wird einfacher mit einfach nur einer Stromquelle, die dann halt etwas kräftiger werden muss. Das reduziert auch die Verluste an der Spule. Wenn überhaupt ein fester Hintergrund, dann per Permanent-magnet. Beim der Spule als Last muss man berücksichtigen dass man da eine Induktivität hat. Damit wird die Stabilität ggf. schwieriger.
Angehängte Dateien:
-

20170629_114748.jpg
420 KB
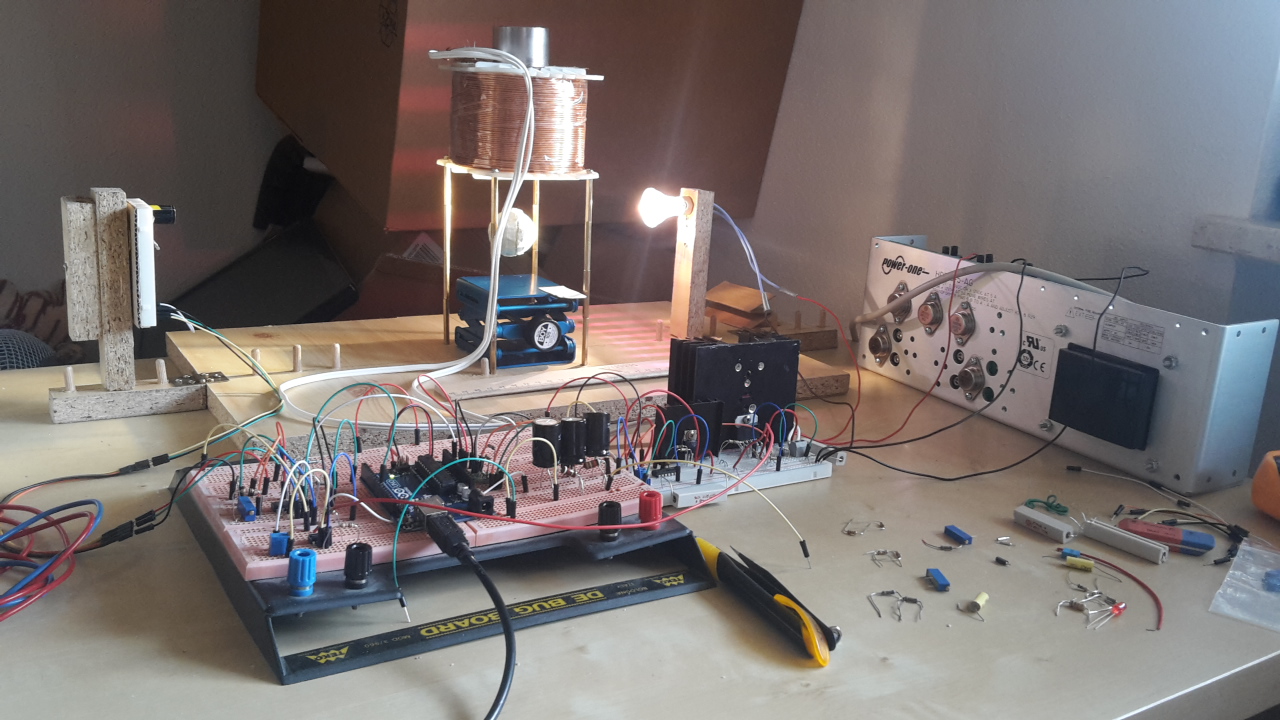
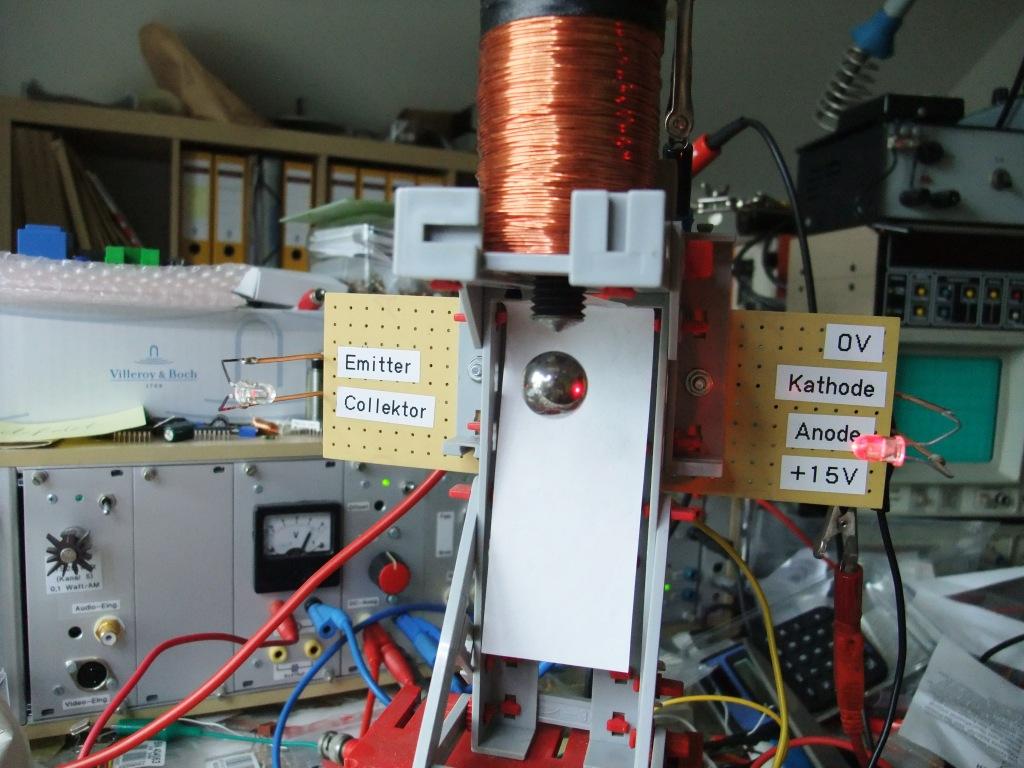
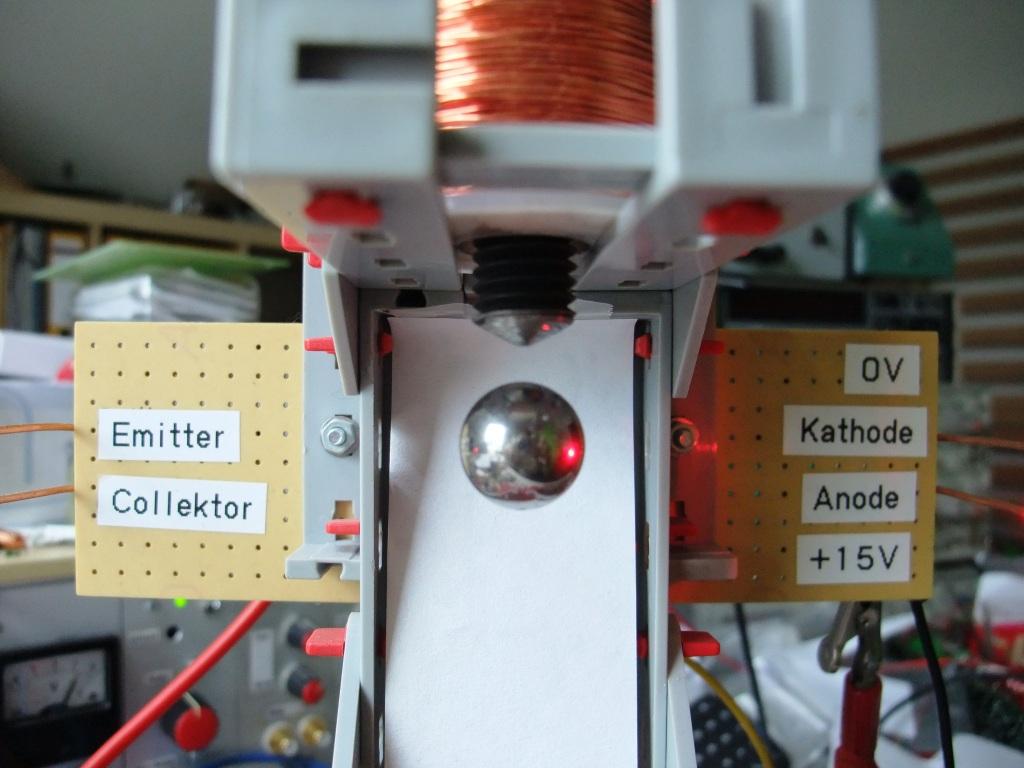
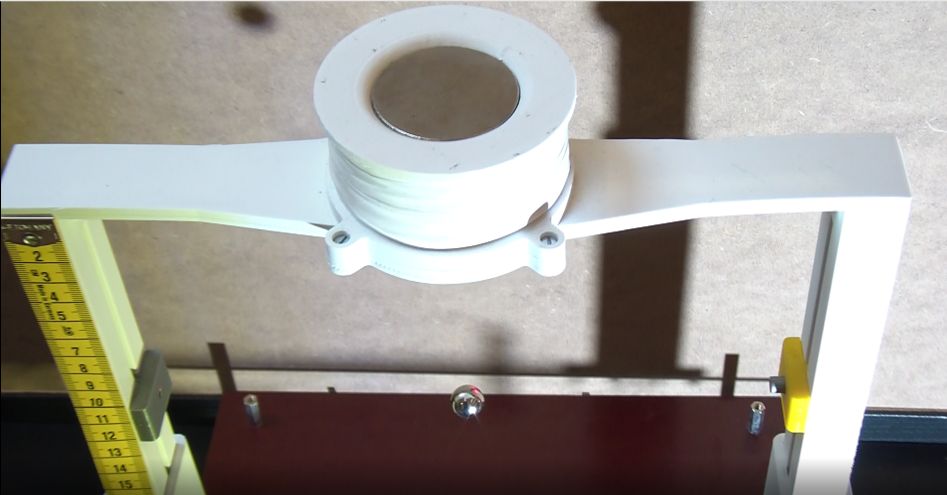
Hallo nochmals, hier ein kurzes Update: Ich weiß nicht sicher woran es lag, aber die spannungsgesteuerte Stromquelle funktioniert nun leicht abgeändert. Um ein schnelles Erfolgserlebnis zu erzielen und die Realisierbarkeit meines Konzeptes zu überprüfen, habe ich die Linearisierung des Positionssignals und einen einfachen PID-Regler mit einem Arduino realisiert. Ergebnis siehe Foto :). Das eigentliche Ziel des Projekts ist jedoch ein Anderes, daher bitte ich euch trotzdem dabei zu bleiben. Ich werde hier sicherlich noch die ein oder andere weitere Frage stellen. Bis hierhin bedanke ich mich erst einmal recht herzlich für euer Interesse.
Michael S. schrieb: > die spannungsgesteuerte > Stromquelle funktioniert nun leicht abgeändert. Um ein schnelles > Erfolgserlebnis zu erzielen und die Realisierbarkeit meines Konzeptes zu > überprüfen, habe ich die Linearisierung des Positionssignals und einen > einfachen PID-Regler mit einem Arduino realisiert. Verrate bloss nicht zu viel, womöglich Schaltung, Software, Spulendaten, Kernmaterial, Strom.... Oder gar Fotos auf denen Einzelheiten erkennbar sind. Schon klar daß das alles strengster Geheimhaltung unterliegt. Michael S. schrieb: > daher bitte > ich euch trotzdem dabei zu bleiben. Ich werde hier sicherlich noch die > ein oder andere weitere Frage stellen. Aber selbstverständlich, nur zu. Hier kann unendlich Wissen abgesaugt werden ohne eigenes Wissen preis zu geben.
Michael S. schrieb: > Hallo nochmals, > > hier ein kurzes Update: > Ich weiß nicht sicher woran es lag, aber die spannungsgesteuerte > Stromquelle funktioniert nun leicht abgeändert. Um ein schnelles > Erfolgserlebnis zu erzielen und die Realisierbarkeit meines Konzeptes zu > überprüfen, habe ich die Linearisierung des Positionssignals und einen > einfachen PID-Regler mit einem Arduino realisiert. Ergebnis siehe Foto > :). > > Das eigentliche Ziel des Projekts ist jedoch ein Anderes, daher bitte > ich euch trotzdem dabei zu bleiben. Ich werde hier sicherlich noch die > ein oder andere weitere Frage stellen. > > Bis hierhin bedanke ich mich erst einmal recht herzlich für euer > Interesse. Hallo! Danke für Dein Update. Das sieht ja schonmal sehr gut aus. Hast Du da einen Neodymmagneten verbaut? Welcher Typ? Herzliche Grüße! J.O
Angehängte Dateien:
-

DSCF4348_E-Magnet.JPG
140 KB -

DSCF4347_schwebende_Kugel.JPG
100 KB -

DSCF4346_schwebende_Kugel.JPG
75 KB -

DSCF4349_schwebender_Wuerfel.JPG
62 KB
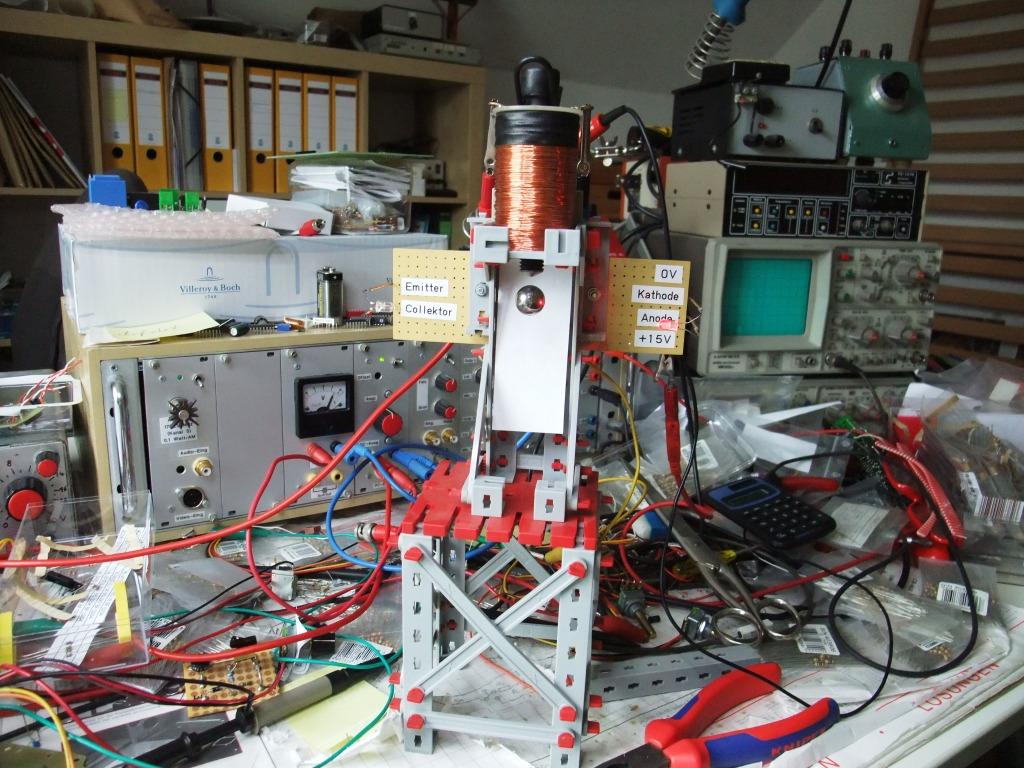
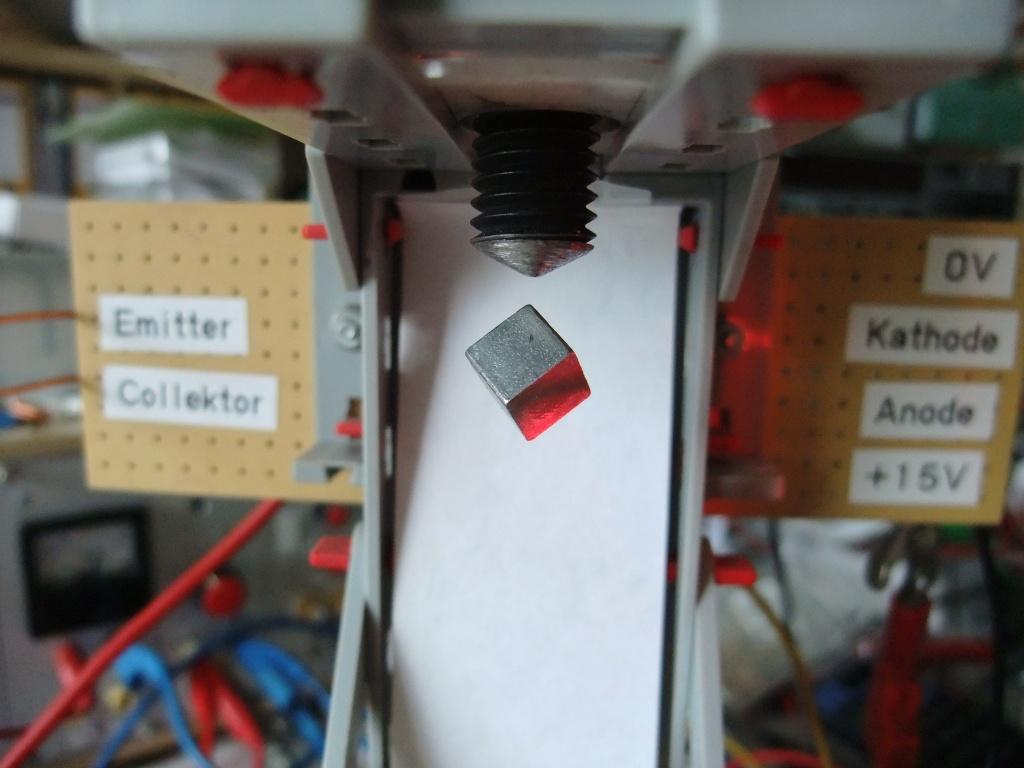
2003 hatte ich mal etwas ähnliches gebaut, allerdings ohne Neodymmagneten. Deshalb betrug der Abstand je nach Gewicht der Eisenkugel auch nur max. 15mm. Statt einer Glühlampe habe ich eine superhelle LED verwendet mit einem Abstrahlwinkel von ca. 6°. Damit konnte ich dann auch unförmige Eisenteile schweben lassen (Eisenwürfel, Zahnräder, Schrauben, Muttern, usw.). Als Empfängertransistor hatte ich einen BPW40 verwendet.
Angehängte Dateien:
-

DSCF4351_ID-Regler.JPG
160 KB -

ID-Regler.jpg
250 KB
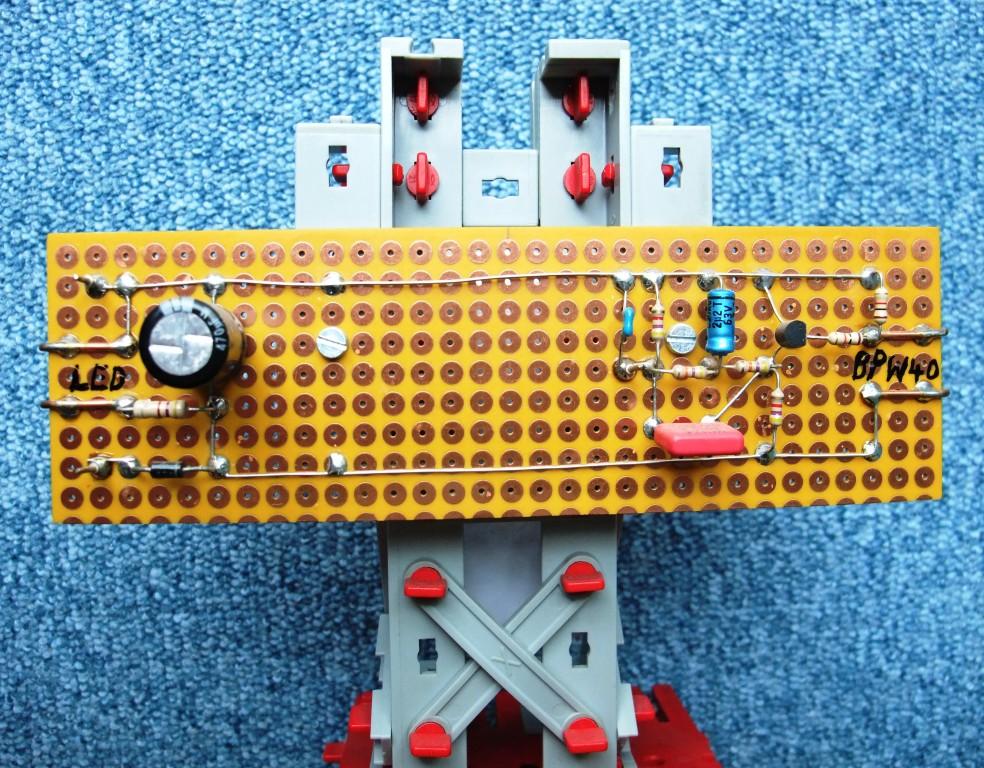
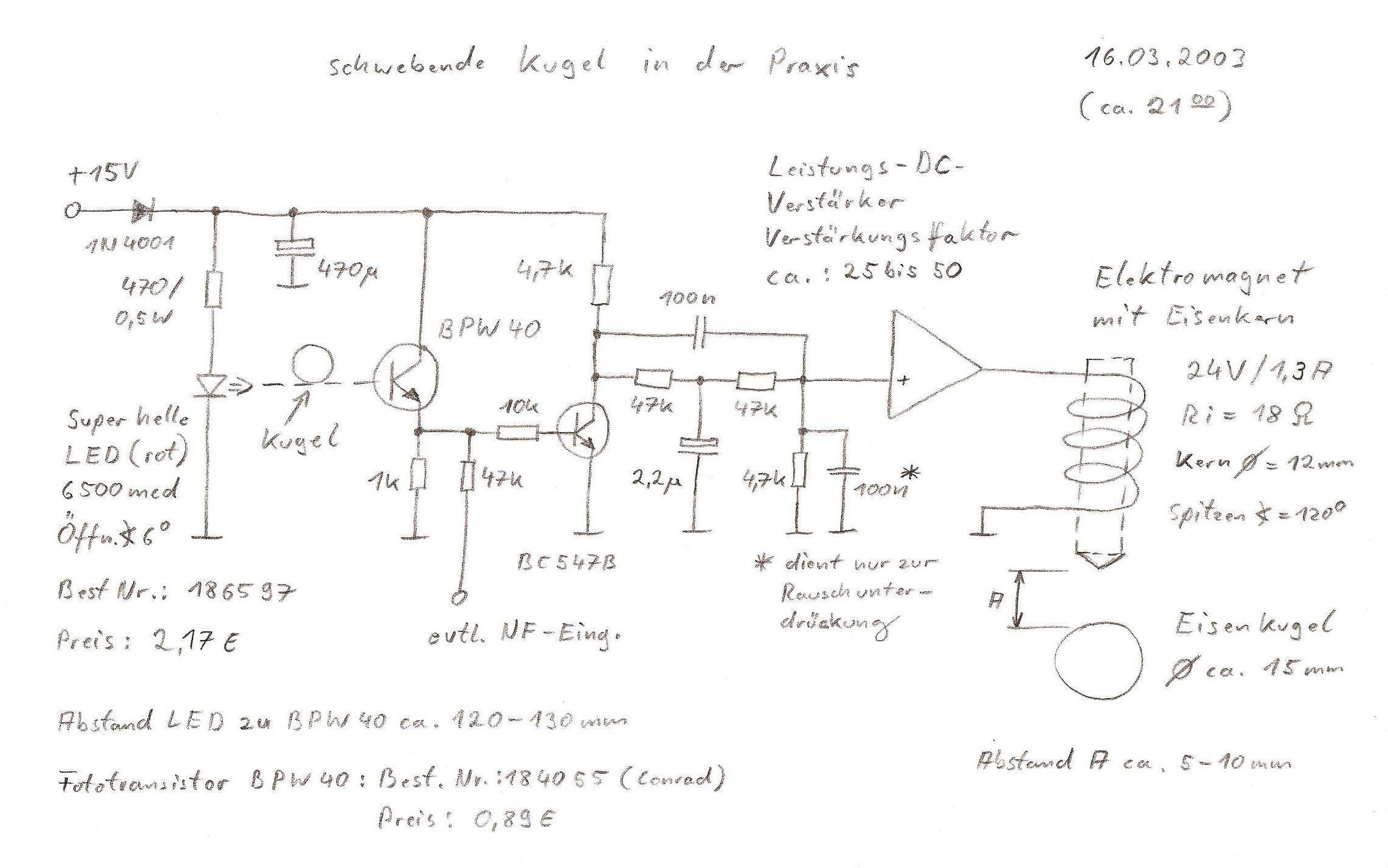
Als Eisenkern für die Spule habe ich eine M12 Schraube verwendet und sie am Ende etwas angespitzt, damit das Magnetfeld möglichst mittig aus dem Kern austreten konnte. Natürlich musste dafür auch ein PID-Regler entwickelt werden. Für den D-Anteil war der 100nF Kondensator parallel zu den beiden 47k Widerständen zuständig. Den I-Anteil übernahm der 2,2 µF Kondensator. Für den P-Anteil wurde ein Leistungs-Gleichspannungsverstärker verwendet, der direkt an die 18 Ohm Kupferspule angeschlossen wurde.
Angehängte Dateien:
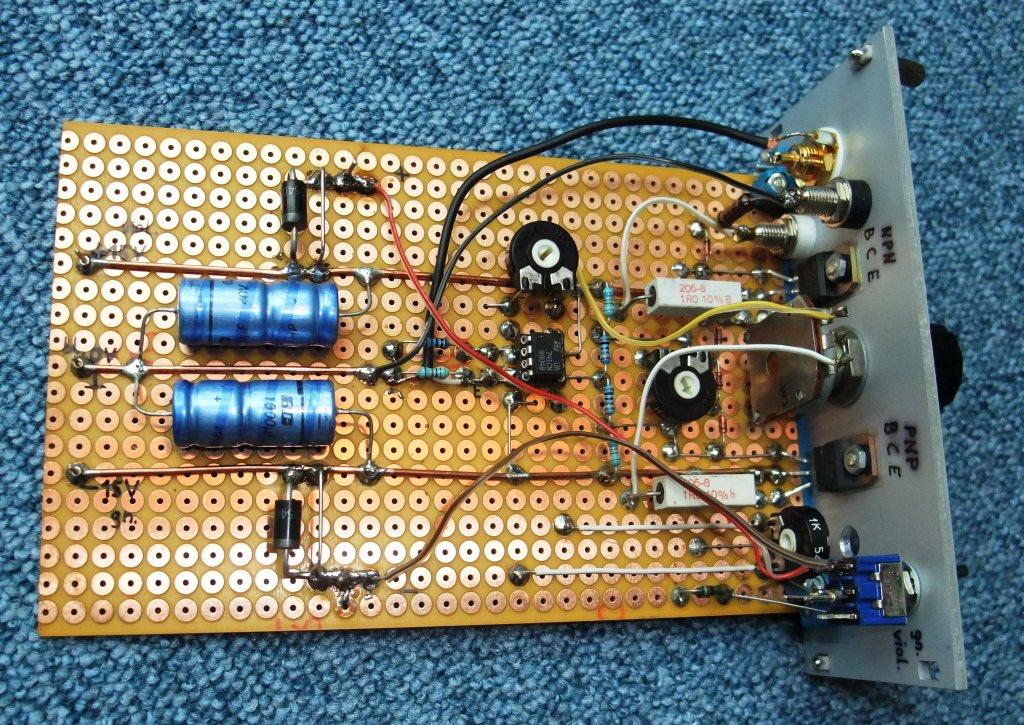
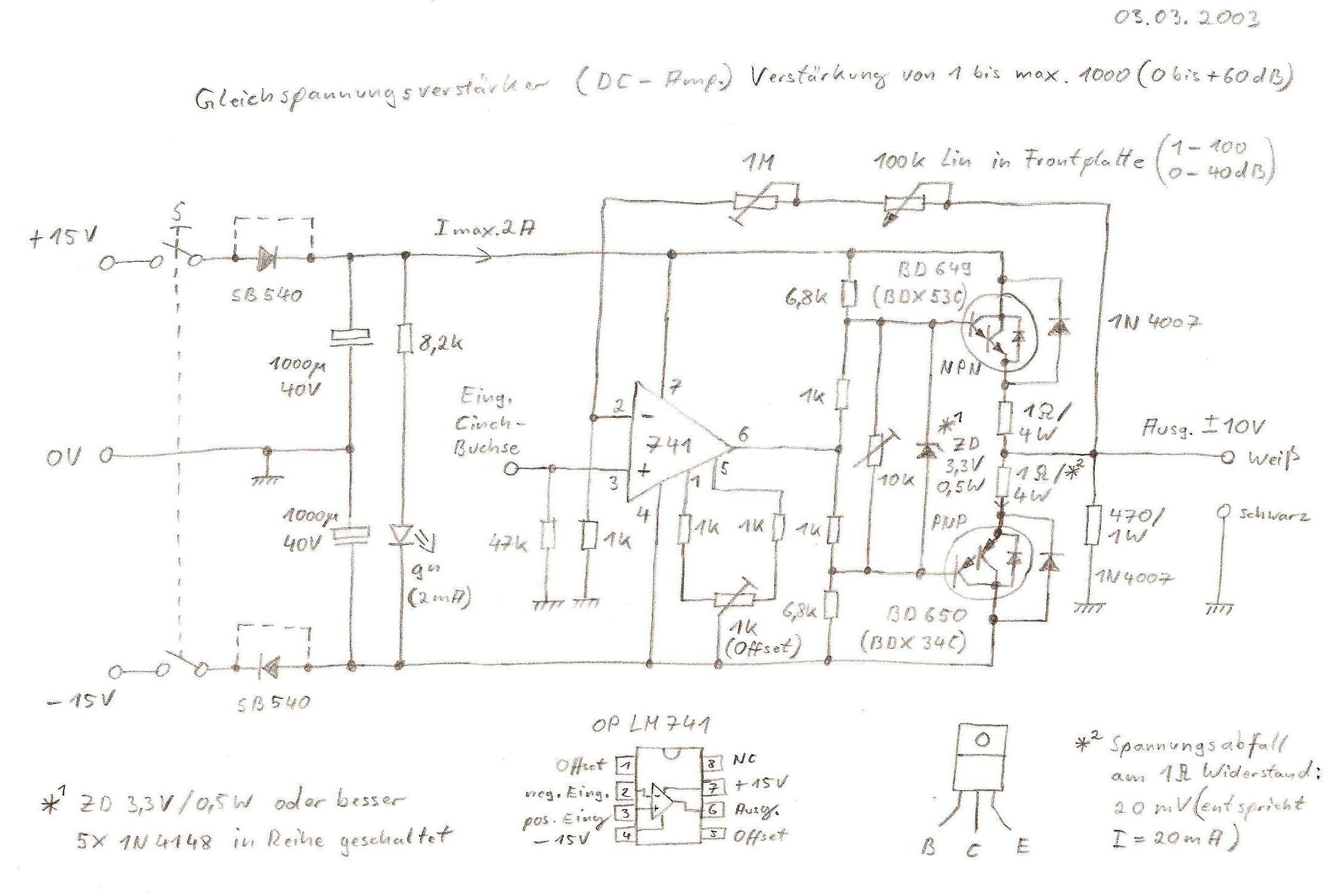
Als Verstärker habe ich den LM741 mit nachgeschalteter Transistorendstufe verwendet, wobei der PNP-Transistor keine Funktion hatte. Der Spulenstrom von ca. 1 Ampere floss ausschließlich über den NPN-Transistor. Bei dem PID-Regler hatte ich noch die Möglichkeit ein NF-Signal von z.B. einem MP3-Player einzuspeisen, dann wippte die Eisenkugel im Takt der Musik auf und ab :)
merkwürdig schrieb: > Michael S. schrieb: >> die spannungsgesteuerte >> Stromquelle funktioniert nun leicht abgeändert. Um ein schnelles >> Erfolgserlebnis zu erzielen und die Realisierbarkeit meines Konzeptes zu >> überprüfen, habe ich die Linearisierung des Positionssignals und einen >> einfachen PID-Regler mit einem Arduino realisiert. > > Verrate bloss nicht zu viel, womöglich Schaltung, Software, Spulendaten, > Kernmaterial, Strom.... Oder gar Fotos auf denen Einzelheiten erkennbar > sind. Schon klar daß das alles strengster Geheimhaltung unterliegt. > > Michael S. schrieb: >> daher bitte >> ich euch trotzdem dabei zu bleiben. Ich werde hier sicherlich noch die >> ein oder andere weitere Frage stellen. > > Aber selbstverständlich, nur zu. Hier kann unendlich Wissen abgesaugt > werden ohne eigenes Wissen preis zu geben. Ich hoffe ansonsten ist alles klar bei dir. Falls es dich irgendwie bereichert: Schaltung: Ziemlich dieselbe, wie bereits hier dargestellter invertierender Stromregler. Software: Eine einfache Lookup-Tabelle die mein Positionssignal linearisiert (gemessen wird die Lichtintensität), dann klassischer PID-Regler der Arduino Bib, am Code ist nichts besonders. Spule 1: ca. 1200 Wicklungen, 10 Ohm, Induktivität unbekannt Spule 2: leider nur ca. 650 Wicklungen (sollen einmal doppelt soviele werden), 3 Ohm, Induktivität unbekannt Kernmaterial: stinknormale Trafobleche, zurecht geschnitten und mit 2K-Kleber geklebt Strom: Spule 1 ca. 1,5 A; Spule 2 ca. 0-3 A Falls du etwas bestimmtes wissen willst, frag bitte präzise. Es ist ohnehin nur ein erster Aufbau ... Jonny O. schrieb: > Danke für Dein Update. Das sieht ja schonmal sehr gut aus. > Hast Du da einen Neodymmagneten verbaut? Welcher Typ? > > Herzliche Grüße! > J.O Ja, es ist ein Neodymmagnet, der die Konstantstromspule unterstützt. Somit braucht die Konstantstromspule weniger Strom, der Gleichgewichtspunkt bleibt durch die Spule aber dennoch in gewissem Bereich einstellbar. Es handelt sich um dieses Modell: https://www.supermagnete.de/scheibenmagnete-neodym/scheibenmagnet-durchmesser-45mm-hoehe-30mm-neodym-n45-vernickelt_S-45-30-N Der Magnet ist allerdings ziemlich stark, sodass ich noch einen Abstand zwischen Spulenkern und Magnet anbringen musste, damit der Gleichgewichstpunkt nicht zu weit nach unten wandert (umso weiter unten der Körper schwebt, desto schwächer wird der Einfluss der regelnden Spule). Ralf L. schrieb: > 2003 hatte ich mal etwas ähnliches gebaut, allerdings ohne > Neodymmagneten. Deshalb betrug der Abstand je nach Gewicht der > Eisenkugel auch nur max. 15mm. Statt einer Glühlampe habe ich eine > superhelle LED verwendet mit einem Abstrahlwinkel von ca. 6°. Damit > konnte ich dann auch unförmige Eisenteile schweben lassen (Eisenwürfel, > Zahnräder, Schrauben, Muttern, usw.). Als Empfängertransistor hatte ich > einen BPW40 verwendet. Was mich interessieren würde: Wie groß ist dein messbarer Positionshub mit der 6° LED? Mein Aufbau soll gegen eventuelle Störungen von außen (z. B. Anheben oder Runterdrücken der Kugel) möglichst stark gegensteuern. Dazu ist ein etwas größerer Messbereich und natürlich starke Aktorik notwendig. Ralf L. schrieb: > Bei dem PID-Regler hatte ich noch die Möglichkeit ein NF-Signal von z.B. > einem MP3-Player einzuspeisen, dann wippte die Eisenkugel im Takt der > Musik auf und ab :) Ziemlich cool, gehört aber in meinem Fall nicht zu den Anforderungen ;).
Angehängte Dateien:
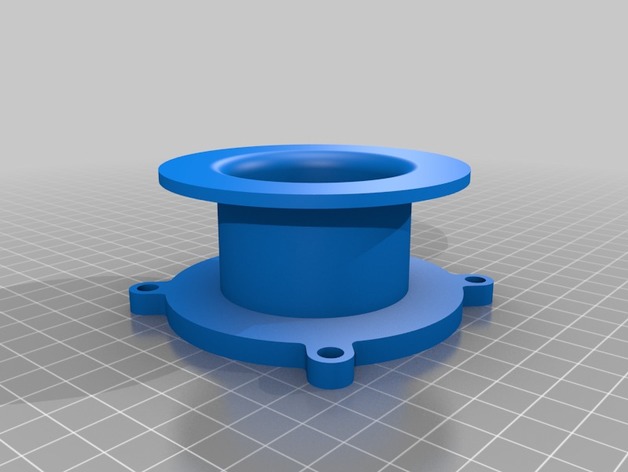
Michael S. schrieb: > Es handelt sich um dieses Modell: > https://www.supermagnete.de/scheibenmagnete-neodym/scheibenmagnet-durchmesser-45mm-hoehe-30mm-neodym-n45-vernickelt_S-45-30-N > Der Magnet ist allerdings ziemlich stark, sodass ich noch einen Abstand > zwischen Spulenkern und Magnet anbringen musste, damit der > Gleichgewichstpunkt nicht zu weit nach unten wandert (umso weiter unten > der Körper schwebt, desto schwächer wird der Einfluss der regelnden > Spule). Hallo, Ah - das ist ja der gleiche Magnet, den auch ich damals benutzt habe. Wenn du willst, kann ich dir ein 3D-Modell zum Ausdrucken eines Spulenkörpers geben. Allerdings habe ich da den Magneten direkt in der Spule sitzen. Bei mir hat das bei 11cm Abstand noch gut funktioniert (bei etwa 500mA Regelstrom). Man muss jedoch auf einen mechanisch stabilen Aufbau und eine präzise Einstellmöglichkeit des Sensors und der Lichtquelle achten... Der Regelbereich liegt bei unter 1mm. Grüße! J.O
Angehängte Dateien:
-

Spulenk.jpg
47 KB
Hier noch ein Bild vom Aufbau des Spulenkörpers. Die Sensoren und die Lichtquelle sind verschiebbar montiert. Man benötigt dann allerdings etwas Fingerspitzengefühl...
Michael S. schrieb: > Was mich interessieren würde: Wie groß ist dein messbarer Positionshub > mit der 6° LED? Mein Aufbau soll gegen eventuelle Störungen von außen > (z. B. Anheben oder Runterdrücken der Kugel) möglichst stark > gegensteuern. Es kommt bei der LED gar nicht so sehr auf die 6° Abstrahlwinkel an, sondern eher auf die punktförmige Strahlcharakteristik (Durchmesser der LED = 5mm). Dadurch wird ein sehr schnelles Nachregeln ermöglicht. Wenn ich die Kugel allerdings mehr als 2,5 mm runter drücke, fällt sie runter. Für kleine Leistungen ist das OK. Der Vorteil eines großflächigen Strahlers, wie bei einer Glühbirne ist vermutlich, dass die Kugel einige Zentimeter runter gedrückt werden kann, bevor sie abfällt. Eine starke Aktorik ist in diesem Fall von Vorteil.
Angehängte Dateien:
-

G_b_s.jpg
86 KB
Jonny O. schrieb: > Hier noch ein Bild vom Aufbau des Spulenkörpers. Googles Bildersuche findet viele ähnliche Bilder. Man beachte die Treffsicherheit der Ergebnisse!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.