Hallo, Andreas S. schrieb: > @Michael U. : > > Meinst Du mit "Odroid" den hier: > https://www.heise.de/make/meldung/Odroid-Go-Bastel-Game-Boy-mit-ESP32-zum-Odroid-Geburtstag-4088637.html > ? Ja, gekauft hier: https://www.pollin.de/p/odroid-go-mobile-spielekonsole-kit-810887 > Und hast Du die JPG-Decompression selbst programmiert? > Wenn ja: mit welcher Library? Nein, wäre wie auch MP3 in der Klasse, wo ich durchaus verstehe, was da passiert, mich der Arbeitsaufwand bei meinen C/C++ Kenntnissen aber doch etwas abschrecken würde. https://github.com/Bodmer/JPEGDecoder Gruß aus Berlin Michael
Hallo zusammen, ich verabschiede mich für zwei Wochen in den Urlaub. Da aber die erste Woche regen angesagt ist... Juhu.... werde ich wohl offline etwas weitermachen. Ich denke, dass ich euch im anschluss einmal einen release von dem Programm zur Verfügung stellen werde, sodass ich vielleicht noch den ein oder anderen Verbesserungsvorschlag von euch erhalten kann :) bis dahin! lg. David
Hallo, schönen Urlaub wünsche ich Dir. Ich habe inzwischen zumindest die FIFO-Version der OV7670 von meinem Bekannten auch hier liegen, kann also durchaus dann mal was testen. Ansonsten habe ich inzwischen zumindest die Versandbestätigung von SeeedStudio für das ESP-Cam Modul bekommen, also auch da abwarten und überraschen lassen. Gruß aus Berlin Michael
@Michael U.: Danke für Deine Ausführungen zum Odroiden und zur JPEG-Lib. @David D.: Schönen Urlaub! @Michael U.: > Ansonsten habe ich inzwischen zumindest die Versandbestätigung von > SeeedStudio für das ESP-Cam Modul bekommen, also auch da abwarten und > überraschen lassen. Da bist Du schon weiter als ich. Ich habe ebenfalls 2 Stück bestellt, aber noch keine Versandbestätigung erhalten. Viele Grüße Igel1
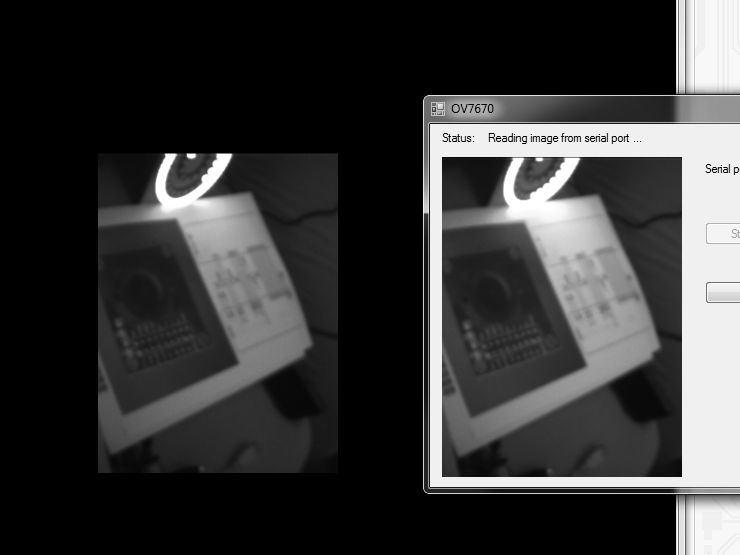
Guten Morgen meine lieben Mitstreiter. Nach einer besinnlichen Weihnachtszeit habe ich mich nun die letzten Tage wieder unserem gemeinsamen Kamera Projekt gewitmet. Ich denke, ich wäre jetzt soweit, das PC-Programm mit euch zu teilen. Ich habe es heute tatsächich einmal geschafft, ein Bild (allerdings nur schwarz) von dem uC zum PC zu senden und dort darzustellen. Dass der Bildstream aber funktioniert habe ich ausprobiert und einfach mal vom uC weiß gesendet. Jetzt liegt das Problem also wieder auf uC seite und dem auslesen bzw. schreiben des Fifos, was offensichtlich noch nicht wirklich funktioniert. Weiterhin hoffe ich auf euren Rat bei folgendem Problem: Derzeit übertrage ich das Bild Zeile für Zeile. Nach jeder Zeile sende ich noch ein CR+LF mit. Diese beiden Zeichen überprüfe ich dann. Sind diese an entsprechender Stelle vorhanden, wird die nächste Zeile vom uC abgefragt. stehen dort andere Zeichen, wird nocheinmal die Gleiche Zeile abgerufen. Die Auswertung der Zeile findet erst statt, wenn >= (BytesProPixel * xResolution)+2 Zeichen im Buffer auf PC Seite vorhanden sind. Wird jetzt aber ein Byte "verschluckt", wartet das Programm und sendet eben nichts mehr an den uC zurück. Das passiert leider relativ häufig. Hier bräuchte ich so eine Art watchdog oder eine andere Art der Herangehensweise. Seid ihr noch im Boot und hättet Lust mit zu spielen? dann würde ich euch das Programm schicken und eine kleine Einweisung/Workarounds :D zusammenschreiben. lg. David
Hallo, schön von Dir zu hören. Bei mir liegt zumindest jetzt auch die OV7670 mit FiFo von meinem Bekannten rum. David D. schrieb: > ich noch ein CR+LF mit. Diese beiden Zeichen überprüfe ich dann. Sind > diese an entsprechender Stelle vorhanden, wird die nächste Zeile vom uC > abgefragt. stehen dort andere Zeichen, wird nocheinmal die Gleiche Zeile > abgerufen. Hast Du Grund zu der Annahme, das da unterwegs was aus der Leitung fällt? Bei meinem LogicAnalyzer übertrage ich 32kB per Loop aus einem externen Ram über einen FTDI mit Einstellung 500kBaud an mein (uraltes) VB-Programm. Da ist nie auch nur ein Bit abhanden gekommen. Ich hatte zwar ein paar Diskussuinen im alten VB6 mit den seriellen Puffergrößen, die habe ich aber gewonnen. ;) Anhsonsten: mitspielen durchaus, der Kram leigt ja ohnehin rum. Ernsthaft werde ich die OV7670 sowiso nicht einsetzen. Meine ESP-Cams liegen allerdings z.Z. auch nur rum. Inzwischen ist beim ESP32-Arduino zumindest ein Demosurce dabei. Das ist zwar ähnlich dem gemacht, was ich hier schon hatte, also Arduino-Rahmen und das IDF-Demo darunter, ist für mich aber vermutlich etwas lesbarer. Dann muß ich da nicht immer meinen Bekannten nerven. OT: da ich bei Pollin mal wieder was entdeckt hatte: https://www.pollin.de/p/portabler-designlautsprecher-schwarz-641081 hat nicht 3 Lautsprecher sondern 2+ passiv-Membran und ist auch USB-Soundkarte, das hat Pollin garnicht erwähnt. Da kommt in einen jetzt erstmal ein ESP32 Wrover + I2S-Decoder rein, als"Klo-Radio" oder so. Muß nur noch klären, ob die diskrete Einschaltlogik mit der Taste den zusätzlichen Strom des ESP32 verkraftet oder ob ich da noch was dazulöten muß. Gruß aus Berlin Michael
@David: ich wäre auch wieder dabei - allerdings nur als interessierter Mitleser und "Gelegenheits-Dreinschwätzer" ... aber das kennt Ihr ja schon. Bitte liste (oder verlinke) nochmals Deine aktuelle Hardware-Konstellation, mit der Du experimentierst (nur für den Fall, dass der eine oder andere - im äußersten Fall sogar ich selbst - Deinen Aufbau einmal nachbaut). Wenn Du ganz viel Motivation hast, vielleicht gar mit einem kleinen Schaltplan. Mit einem Programm wie "Fritzing" sollte so etwas in wenigen Minuten getan sein. Was den Code angeht, so würde ich anregen, ihn bei Github oder einem ähnlichen Code-Repository einzustellen. Alternativ betreibt mikrocontroller.net auch einen eigenen SVN-Server, in dem man ebenfalls Code einstellen könnte: https://www.mikrocontroller.net/articles/Hilfe:SVN Allerdings ist Github im OpenSource-Bereich meiner Meinung nach etwas weiter verbreitet. Vorteil: alle können an Deinem Projekt mitproggen. Nachteil: Du bist nicht mehr Herr "Deines" eigenen Codes - weil es dann nämlich nicht mehr so richtig "Dein" Code ist. Viele Grüße Igel1
Andreas S. schrieb: > Vorteil: alle können an Deinem Projekt mitproggen. Gibt es da jemanden? Nur mal so gefragt ... Ich überlege, mit dem ATXMega mitzuspielen, passt halt nicht so ganz zum aktuellen Ansatz.
Hallo, Dieter F. schrieb: > Andreas S. schrieb: >> Vorteil: alle können an Deinem Projekt mitproggen. > > Gibt es da jemanden? Nur mal so gefragt ... Um realistisch zu bleiben: sehr wahrscheinlich nicht wirklich. Ich würde auch nur seinen Code hier auf den AVR packen und etwas Fehlersuche mit betreiben, seine PC-Software würde ich ohnehin nur nutzen. zumindest, wenn ich dafür nicht erst meinen PC "umbauen" muß... Die OV7660 ist nicht unbedingt mehr so sinnvoll, um die wirklich zu nutzen. Für Spezialanwendungen (Objekterkennung? Bewegungserkennung? Barcode/QR-Code Leser?) vielleicht noch. Selbst die OV7670 ist nicht soviel moderner, allerdings macht die etwas höhere Auflösungen und JPEG-Ausgabe. > Ich überlege, mit dem ATXMega mitzuspielen, passt halt nicht so ganz zum > aktuellen Ansatz. Ein ATXMEga (Xplain...) liegt hier irgendwo noch rum, nie wirklich benutzt. Inzwischen sind ESP8266/ESP32 meine Freunde, die ESP8266 im realen Einsatz hier für diverse Home-Spielereien, die ESP32 mehr im Experimetierstaduin, weil die Module für den Preis einfach noch ungeahnte Möglichkeiten bieten. Die OV7670 habe ich am ESP32, da denke ich noch über eine "reale" Verwendung nach, Wetter-Cam auf dem Balkon vielleihct, da könnte sie alle paar Minuten ein Standdild in voller Auflösung schicken. BT beim ESP32 bisher nur angetestet, als BT-Speaker. Rechenleistung reicht bequem für Webstream, Software-MP3-Decoder und I2S Ausgabe. läuft hier u.a. auf einem Odroid Go: https://www.pollin.de/p/odroid-go-mobile-spielekonsole-kit-810887?&gclid=EAIaIQobChMIm76Gy4vz3wIVk-J3Ch2_kAhVEAQYASABEgJuBPD_BwE Da habe ich bei den Emalatoren letztens entdeckt, daß jemad Frode für den ESP32 angepasst hat, irgendwie genial, Frodo stammt ursprünglich vom Amiga, Christian Bauer hat ihn dann für alle möglichen OS bereitgestellt. Fehlt nur noch, das jemand das mit Shapeshifter https://de.wikipedia.org/wiki/ShapeShifter macht, aber ein 68020 mit 14MHz (als Minimum) auf dem ESP32??? OK genug Geplauder... ;-) Insofern wird OV7670 und AVR für mich eben nur als Beweis dienen können, daß man es irgendwie machen kann. Gruß aus Berlin Michael
Angehängte Dateien:
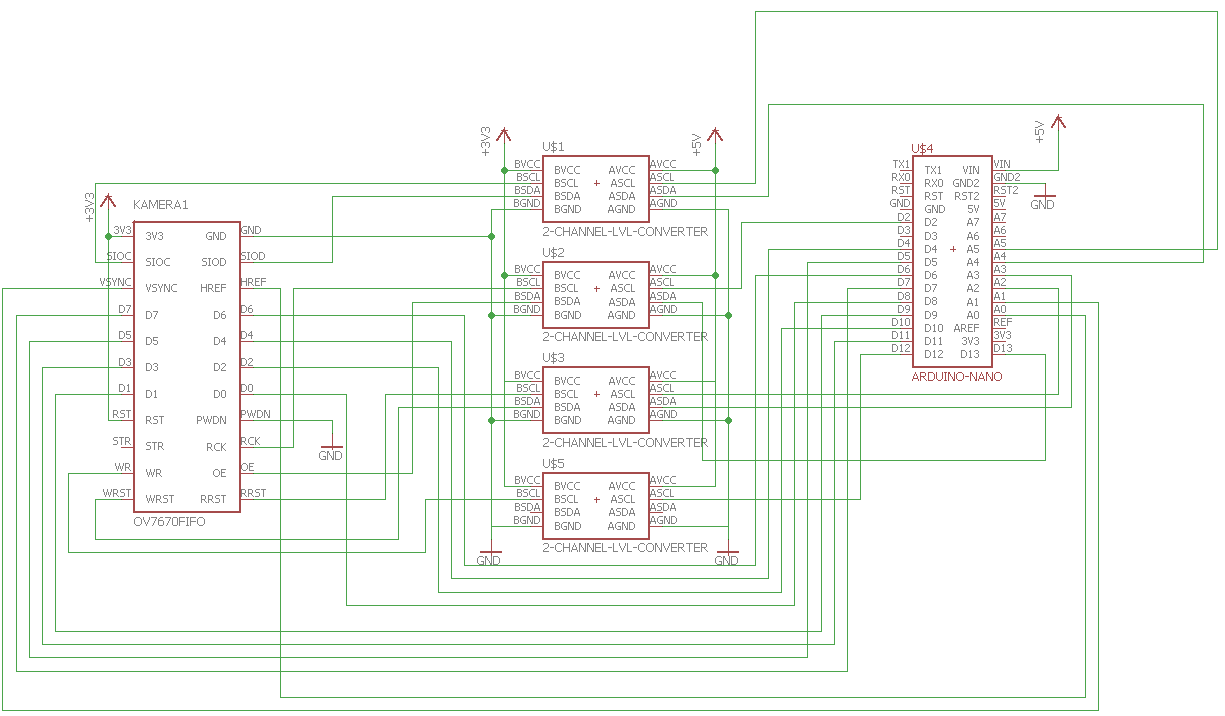
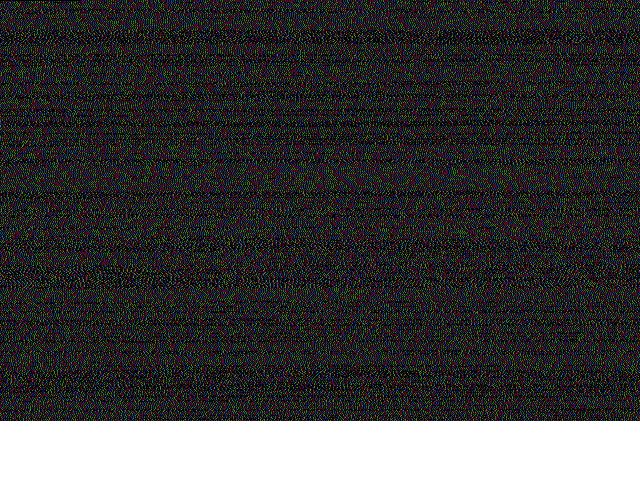
Guten Abend zusammen :) Das freut mich ja, dass ich direkt Rückmeldung bekommen. Anbei nochmal der gewünschte Schaltplan. >Hast Du Grund zu der Annahme, das da unterwegs was aus der Leitung >fällt? Leider hatte oder habe ich das tatsächlich. Ich glaube zwar das es nicht Aufgrund von EMS ist, sondern lediglich durch schlechte Programmierung. Das mit dem abbrechen mitten im Bild-Stream habe ich jetzt tatsächlich hinbekommen. (Das Problem lag daran, dass ich nicht gesehen habe, dass ich die Write- und Read-Reset Leitungen des Fifos invertieren muss... kaum ist das passiert, bekomme ich auch (zuverlässig?!) meine 480 Zeilen geliefert. zuverlässig in Klammern, weil es bisher erst in den letzten beiden Bildern so war. Derzeit fahre ich aber noch im RGB888 Format bei voller Auflösung, einer Baudrate von 19200 und REICHLICH puffer Zeiten im ms Bereich, sodass ich aktuell für ein Bild rund 15 min brauche :D. Immerhin ist durch das nun offensichtlich funktionierende zurücksetzen der Write und Read Pointer im Fifo ein plausibles schwarzes Bild mit leichtem Rauschen hinterlegt und nicht wie vorher das komplette Farbspektrum willkürlich :D... Kaum schreibe ich diese Satz stoppt die Übertragung bei 418 Zeilen.... >Gibt es da jemanden? Nur mal so gefragt ... Nein leider nicht :D Es gibt auch ein Github-Projekt zu diesem Anliegen hier, dass ein User in Leben gerufen hatte, aber nachdem ich der einzige war, der darin weiter gearbeitet hat, habe ich das Uploaden eingestellt.Ich stelle euch aber gerne den Source Code für den Atmega zur Verfügung. Ich hoffe, dass ich es heute Abend schaffen -werde. Dazu packe ich dann noch einen Release für mein "OV7670-Terminal" Programm. @Dieter.F du bist herzlich eingeladen auch mit einem anderen Controller mit einzusteigen. Viele Grüße David EDIT: Hier noch der Github Link: https://github.com/igittigitt/ov7670
Hallo, David D. schrieb: > Ich stelle euch > aber gerne den Source Code für den Atmega zur Verfügung. Ich hoffe, dass > ich es heute Abend schaffen -werde. Dazu packe ich dann noch einen > Release für mein "OV7670-Terminal" Programm. mach das mal, ich werde es auf jeden Fall mal anwerfen und reinschauen. Im Moment wohl speziell in die Übertragungsgeschichte, RGB888 ist ja erstmal gut handhabbar. Vielleicht schicke ich einfach einen passenden BMP-Header vorneweg und lese es wie früher per TeraTerm in den Buffer und speichere den. Dann kann es mir ja Irfanview anzeigen. Ein lauffähiges altes VB6 habe ich hier nicht mehr, sonst hätte ich mir da meine Empfangsroutine vom LogicAnalyzer ausgeliehen... Gruß aus Berlin Michael
@David: solltest Du noch keinen LogicAnalyzer haben, so wird hier in diesem Forum im Marktbereich gerade genau derjenige LA gebraucht angeboten, den ich ebenfalls habe. Ist ein phantastisches Gerät, das ich jedem nur empfehlen kann: Beitrag "Intronix Logicport 34 Kanal Logic und Bus Analyser" Einziger Nachteil: er hat nur 2k Puffer, die allerdings dank intelligenter Sampling-Methodik optimal ausgenutzt werden. Notfalls muss man halt den (sehr flexiblen) Trigger etwas klug wählen - dann kommt man in 99% der Fälle auch mit den 2k aus. Dafür kann das Teil auch 250MHz-Signale noch analysieren (mit internem Timer sogar bis 500MHz) - absolut sensationell für diesen Preis. Und die Logic-Level sind auch in weiten Volt-Bereichen einstellbar. Die Software ist ebenfalls sehr, sehr gut und mächtig. Hier die Specs: http://www.pctestinstruments.com/logicport/specifications.htm Bei Interesse: schnell zuschlagen - das Teil wird bald weg sein. Viele Grüße Igel1 PS: nich ich bin weder mit dem Verkäufer verwandt noch kenne ich ihn.
Andreas S. schrieb: > Die Software ist ebenfalls sehr, sehr gut und mächtig. Zu gut und mächtig für mich (wahrscheinlich) - ich kam damit nicht klar und habe ein solches Teil vor einiger Zeit verkauft. Aber das ist - wie alles - relativ :-)
Guten Abend, wie versprochen die Uploads: Das Terminal Programm (ich vermute, dass das ein .net-Framework o.ä. installiert sein muss, falls ihr es nicht ausführen könnt, einfach nochmal melden, dann finden wir bestimmt eine Lösung): https://github.com/igittigitt/ov7670/tree/TWI-Interfac/OV7670-Terminal-Releases Und der Code fürs AVR Programm: https://github.com/igittigitt/ov7670/tree/TWI-Interfac/OV7670-AVR Und hier noch eine Kurzanleitung: Wie schon erwähnt funktioniert noch nicht sehr viel, aber auf Wunsch stelle ich es trotzdem schon einmal zur Verfügung. 1. Alles anstöpseln und dann beim Aufrufen des Terminals unter der Register-Karte "Settings" und in der GroupBox Com-Port die voreingestellten Werte benutzen (evtl. muss der Com-Port eingestellt werden) und auf verbinden klicken. (Falls hier Änderungen vorgenommen werden wollen, müssen diese Ebenfalls im AVR Code geändert werden (UART.c)) 2. nun sollte "connected" in grüner Schrift in gleicher Box stehen. Jetzt muss ein paar mal auf den Button get camera status geklickt werden, bis bei Version zwei plausible Hex Adressen erscheinen (Bei mir 0x76 0x73) Hierbei handelt es sich noch um ein Kommunikations Problem, das ich noch nicht identifizieren konnte. Mehrmaliges klicken behebt dieses aber :D 3. nun können unter den Groupboxen Read Register und Write Register beliebig die Register geschrieben und gelesen werden. Eine jeweilige Bestätigung erscheint unten in der Status leiste. Es ist auch möglich, mit "Read Device Settings" alle register auszulesen und ggf. abzuspeichern. sollte der Fortschrittsbalken unerwartet stehen bleiben ebenfalls nochmal den Button drücken und hoffen, dass er diesmal durchläuft. ;-) sollte jemand den Fehler finden, bin ich sehr Dankbar. 4. Das Laden von abgespeicherten Settings funktioniert auch. Allerdings nicht, diese auch alle wieder auf den Chip zu schreiben. 5. "take" (wo eigentlich "take picture" stehen sollte, funktioniert derzeit nur im VGA und RGB Modus. d.h bevor ein Bild aufgenommen wird muss erst das Register 0x12 mit 0x04 beschrieben werden. Das ganze am besten mit "get camera status" verifizieren. 6. Ab dann beginnt der Bildaufbau. dauert etwas und in der Statusleiste sieht man, wieviele Bildzeilen bereits empfangen sind. (ca 2-3 Sekunden pro Zeile 7. unter der Registerkarte _picture kann kann man unter den beiden Bildboxen den Haken setzen und bekommt das Bild, dass gerade empfangen wird etwas größer dargestellt. Bild speichern funktioniert ebenfalls. die anderen Knöpfe noch nicht. Zum schluss möchte ich noch eins Anmerken, die Zeilen, die Seriell ausgelesen werden, geben das Bild wieder, dass bei "take picture" den Sensor belichtet hat, also bringt ein belichten der Kamera während der Übertragung rein garnichts. Natürlich habe ich aktuell noch überhaupt kein Bild und bei euch wird mit meinem Code ebenfalls nur Rauschen zu erkennen sein. Daher lade ich euch hiermit recht herzlich ein, dass ganze zu testen. Gerne gehe ich auch noch auf den Code ein, wenn es jemanden interessiert. viele Grüße David PS: Danke für den Link des Logik Analysers... Leider ist mein Budget aktuell etwas eng, sodass ich mit 2 Kanal Oszi leben muss. Ich habe auch irgendwo noch einen Logikanalyser den ich zusammen mit einem Billig USB Oszi gekauft habe rumliegen. Der ist aber ebenso unzuverlässig wie das Oszi an sich, was vermutlich noch nichtmal an der Hardware sondern vielmehr an der unfertigen zugehörigen Software liegt.
@David: Dein Programm lief auf meinem Computer (Win7 64bit) direkt out of the box. Allerdings habe ich keine Levelshifter, um Deine Schaltung nachzubauen. Ich konnte also nur das Programm anwerfen und ein paar Knöbbschen drücken. Wenn Du mir sagst, in welchem Format Du die Bilder aus dem AVR rausschreibst, kann ich das ja vielleicht mal in meinem ARM nachstricken (ohne Gewähr, dass ich jemals dazu komme ...). Wirst zu den Code vom OV7670-Terminal.exe auch noch veröffentlichen? Irgendwo hatte ich schon einmal so ein Programm gesehen ... wo war das nur ... Viele Grüße Igel1
Andreas S. schrieb: > Irgendwo hatte ich schon einmal so ein Programm gesehen ... wo war das > nur ... Ha - gefunden: qSerialTerm heißt das Dingen - ich habe es aber niemals probiert: http://embeddedprogrammer.blogspot.com/2012/07/hacking-ov7670-camera-module-sccb-cheat.html > nach qSerialTerm suchen
Hallo, Terminalprogramm startet hier auch erstmal ohne Probleme. Die AVR-Sourcen habe ich erstmal in die ArduinoIDE geworfen und die dort nötigen
1 | #ifdef __cplusplus |
2 | extern "C" {
|
3 | #endif |
4 | ... |
5 | #ifdef __cplusplus |
6 | } // extern C |
7 | #endif |
auf die .h Dateien verteilt. Gab noch ein paar unkritische Warnings und irgendwo fehlte ein #include "UART.h", dann lief er erstmal durch. Ein aktuelles AVR-Studio habe ich nicht drauf und werde es auch nicht installieren. ;) Mal schauen, heute Nachmittag mal OV2840-FIFO-Modul und Peegelwandler an einen Arduino UNO oder so stecken und mal schauen, was überhaupt passiert. Dann werde ich mir das mal genauer anschauen. Gruß aus Berlin Michael
David D. schrieb: > @Dieter.F du bist herzlich eingeladen auch mit einem anderen Controller > mit einzusteigen. Na ja - ich nehme erstmal den Nano ohne Arduino und spiele damit etwas herum. Mit dem 16MHz-Takt an PB0 schluppt die Kamera schon schön :-). Über ein Oszilloskop man man da schon mal prima die Signale (HSync etc.) beobachten. Ein Datenbit funkt dann auch schön wild, wenn man die Kappe von der Kamera abmacht. Ich verwende keine Level-Shifter - entweder das Teil (ich habe 4 im Sonderangebot gekauft :-) ) hält das aus oder nicht. Was mir aufgefallen ist - bei einigen IF's hast Du "=" statt "==" geschrieben - das ist "nicht optimal". Ich werde mir jetzt mal die "Kommando-Verbindung" etwas genauer anschauen. Bis gerade fragte ich mich, wie Du bei solchen Taktraten ein Bild mit dem "lahmen" :-) 328P abholen willst - bis ich Register 0x11 entdeckte ... VG
Hallo, Dieter F. schrieb: > Ich verwende keine Level-Shifter - entweder das Teil (ich habe 4 im > Sonderangebot gekauft :-) ) hält das aus oder nicht. naja... ich sage es jetzt mal so: aus dem Alter bin ich raus... Meie Sorge ganz allgemein ist da aber weniger, ob sie das aushält, mehr der Umstand, daß ich mich da auf das Verhalten der Kamera da nicht verlassen wollte. Die Pegel an den Eingängen sind dann doch merklich oberhalb der Specs. Gruß aus Berlin Michael
Angehängte Dateien:
-

8barColorBar.bmp
150 KB -

Fade_to_Gray.bmp
76 KB -

no_Test_pattern.bmp
15 KB

Hallo Dieter, ja das Register 0x11 ist erstmal wichtig um die CLK etwas runter zu bekommen, damit man das VSync signal auch abtasten kann. >Was mir aufgefallen ist - bei einigen IF's hast Du "=" statt "==" >geschrieben - das ist "nicht optimal". Das wäre natürlich suboptimal, ich werde den Code direkt durchgehen und danach suchen. Im falle der if(errorCode=functionXXX()) ist es allerdings gewollt, da ich so abfragen kann, ob die funktion durchgelaufen ist oder nicht. Mir ist aber selber noch ein Fehler aufgefallen. In der Funktion
1 | void OV7670_captureNewImage (void) |
muss es heißen:
1 | ... |
2 | OV_WR_PORT &= ~(1<<OV_WR_PinNo); |
3 | while(!getValueOfPin(OV_VSync_PIN,OV_VSync_PinNo)); |
4 | OV_WR_PORT |= (1<<OV_WR_PinNo); |
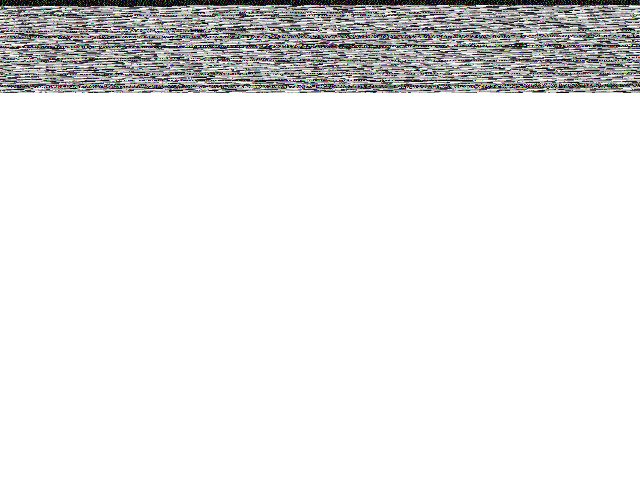
hier hatte ich vorher OV_WR_PIN stehen. Das muss definitiv korrigiert werden. Dann habe ich gerade noch etwas mit den Low Active Signalen gespielt und das Timing etwas geändert. Das werde ich jetzt direkt noch ins Github Project Pushen. Anbei noch drei Bilder. Das eine aufgenommen im "normalen" Modus, das zweite, bunte mit dem test pattern 8bar color bar (Register 0x70 [7] und 0x71 [7] auf 10 gestellt) Immerhin wird es Bunt. Und das dritte mit dem Testpattern 11 "FadeToGrayColorBar" Aber etwas scheint entweder mit der Bildaufnahme, der Farb zusammenstellung oder der Auflösung nicht zu passen. Aber man sieht unterschiede. vielen Dank fürs Miteifern. Die nächste Woche bin ich leider auf Dienstreise. Vielleicht kann ich die Zeit nutzen, um die Kommunikation zwischen uC und PC zu beschreiben, oder zumindest meine Vorstellung davon. lg. David
Michael U. schrieb: > naja... ich sage es jetzt mal so: aus dem Alter bin ich raus... Ich auch - aber ich suche auch keine Dauerlösung, nur einen "proof-of-concept" :-) Michael U. schrieb: > Meie Sorge ganz allgemein ist da aber weniger, ob sie das aushält, mehr > der Umstand, daß ich mich da auf das Verhalten der Kamera da nicht > verlassen wollte. Die Pegel an den Eingängen sind dann doch merklich > oberhalb der Specs. Das gilt nur in Richtung der Kamera über die SCCB-Schnittstelle. Hier kann man zur Sicherheit die geschriebenen Register-Werte verifizieren. Von der Kamera kommen "Kamera-verträgliche" Pegel, welche vom 328P sicher erkannt werden (bei 3,3V VCC des 328P müssen die > ca. 1,8 V sein). Falls das nicht funktioniert steuere ich halt nach. David D. schrieb: > Das werde ich jetzt direkt noch ins Github > Project Pushen Damit habe ich keine Erfahrung - würde ggf. dann direkt austauschen.
Hallo, Dieter F. schrieb: > Von der Kamera kommen "Kamera-verträgliche" Pegel, welche vom 328P > sicher erkannt werden (bei 3,3V VCC des 328P müssen die > ca. 1,8 V > sein). wenn Du einen 3,3V Nano hast, passen die Pegel doch sowieso und Levelshifter sind unnötig. Ich hatte da auf einen 5V vermutet... Gruß aus Berlin Michael
Michael U. schrieb: > wenn Du einen 3,3V Nano hast Schrieb ich doch :-) - das ist zwar nicht ganz im Sinn der reinen Lehre, wird aber wohl funktionieren.
David D. schrieb: > 5. "take" (wo eigentlich "take picture" stehen sollte, funktioniert > derzeit nur im VGA und RGB Modus. Wo genau im Code liest Du eigentlich die Daten vom Bus ein? Sag nicht da:
1 | char OV7670_getByte (void) |
dazu gibt es keinen Aufruf ...
Hallo, Dieter F. schrieb: > Wo genau im Code liest Du eigentlich die Daten vom Bus ein? > > Sag nicht da: > char OV7670_getByte (void) > > dazu gibt es keinen Aufruf ... Nein, er benutzt char readByte (void) 2 Zeilen darüber... Ordnung ist eben nur das halbe Leben. ;) Gruß aus Berlin Michael
Michael U. schrieb: > Nein, er benutzt char readByte (void) 2 Zeilen darüber... Danke - muss wohl die Tomaten wegblinzeln ... Jetzt verstehe ich auch, wieso ich keine PWM für den Takt finde.
Hallo und Grüße aus dem Ausland. Am Wochenende bin ich wieder zuhause und in der Lage detailierter auf die Fragen und die Erklärungen einzugehen. Grob aus dem Kopf heraus den groben Ablauf: der Atmega ist nach der Initialisierung der verschiedenen Komponenten in einer Art Idle-Mode(Programmstatus = -1). Ansonsten gibt es, wie in einem Automaten verschieden Programmstati. In welchen der uC versettz wird, hängt von dem per UART vom Terminal empfangenen Kommando ab. Die Befehlsverarbeitung findet in der UART.c statt. Hier gibt es (relativ weit unten [was für eine Angabe xD]) eine funktion, die die Empfangenen Bytes auswertet. Dabei gilt Folgendes Protokoll: 1. Byte = Befehl je nach Befehl nun wvtl. 1 oder mehrere Datenbytes 2. Byte = Datenbyte ... n. Byte = n-tes Datenbyte n+1 Byte = 13 [ASCII CODE = Carrige return] n+2 Byte = 10 [ASCII CODE = Line Feed] diese Funktionen ändern den Programmstatus des uC. Die einzelnen zum Programmstatus auszuführenden Funktionen werden in der main.c durch eine Switch Anweisung angesteuert. Alle OV7670 Funktionen liegen auch im entsprechenden OV7670_withFifo.c (oder so ähnlich). Eine Bildübertragung funktioniert wie schon erwähnt immer Zeilenweise. Ich habe letztes Wochenende noch eine zweite Version des Terminals "released". Hier ist ein Fehler in der Farbberechnung korrigiert worden und die Auflösung wird jetzt entsprechend des eingestellten Registers berücksichtigt (sowohl beim uC als auch beim Terminal) dadurch reduziert sich die Aufnahme von einem Bild dramatisch. Ich empfehle hier das QCIF Format. Weiterhin sollte jetzt das Farbformat YUV - sofern per Register eingestellt - den Y Teil, also den Helligkeitswert abbilden. (UV)vom YUV werden aktuell gekonnt ignoriert. Trotzdem bekomme ich noch kein Bild zusammengebaut.Ich bin für jede Art von Ratschläge offen :) viele Grüße David
Saturi schrieb: > Trotzdem bekomme ich noch kein Bild zusammengebaut.Ich bin für jede Art > von Ratschläge offen :) Hallo David, kannst Du die Source für die PC-SW offen legen? Deine Abfrage der Datenbytes mit eigener Taktung funktioniert mit Sicherheit nicht (zuverlässig). Die Kamera braucht eine externe Frequenz von 10 bis 24 MHz. 8 MHz gehen auch, das habe ich ausprobiert und damit will ich (auf dem 328P) arbeiten. Du musst Dich bei der Auswertung schon an den Pixeltakt (der ausgegeben wird und den Du über das Register 11 beeinflussen kannst) halten. Ich spiele aktuell ein wenig damit herum. Mein Ansatz wird der Versuch einer "Interleaved-Verarbeitung" sein. Am Wochenende werde ich hoffentlich etwas mehr Zeit dazu finden. Alternativ zur PC-SW überlege ich ein kleines Display "rudimentär" (ohne Farb und Helligkeitsinformationen - stumpf Schwarz/Weiß per Schwellwert) per SPI oder I2C mit dem Ergebnis zu versorgen. Mal schauen. Wenn es nicht so funktioniert, wie ich mir es vorstelle wechsle ich doch auf den ATXMega und nutze DMA :-) VG Dieter
Guten Abend Dieter, >Die Kamera braucht eine externe Frequenz >von 10 bis 24 MHz. 8 MHz gehen auch, das habe ich ausprobiert und damit >will ich (auf dem 328P) arbeiten. Auch die Version mit FIFO? Ich nehme an, dass du dich nicht durch die gesamte Unterhaltung gelesen hast :D (was ja auch niemand erwarten kann). Also es gibt von dem OV7670 zwei Varianten. Eine ohne und einen mit Fifo. Ursprünglich sind wir mit der "ohne Fifo" Variante gestartet. Hier hatten wir aber die von dir angesprochenen "Timing"-Probleme, die jeweiligen Pixel Werte "aufzufangen". Wir haben auch die Clock-Rate reduziert, sind aber zu dem Ergebnis gekommen, dass -Aufgrund des für Kamera Leihen eh komplexen Themas- zumindest fürs erste die Variante mit FIFO der bessere Einstieg ist. Mein Verständnis bis dato ist, dass ich den Fifo einen ganzen Frame lang beschreiben lasse und danach das Schreiben verhinder. Dadurch liegt das Bild im FIFO und kann in aller Ruhe ausgelesen werden. Eine externe-Clock entfällt glaube ich ebenfalls, weil die intern über einen Oszillator auf dem Board getaktet wird. Müsste ich aber Zuhause nochmal checken. Kannst du mir da zustimmen oder habe ich etwas völlig falsch verstanden? Danke lg. David
>kannst Du die Source für die PC-SW offen legen?
die würde ich Ungerne auf einer Plattform wie Github veröffentlichen.
Ich stelle aber gerne jedem, der hier mittüfteln möchte den
SourceCode/Projektdateien zur freien Verfügung.
Da würde ich vorschlagen einfach die E-Mail Adresse per PN an mich?
Saturi schrieb: > Auch die Version mit FIFO? Nein - das hätte mir eigentlich auffallen müssen ... :-/ Ich habe nur Kameras ohne FiFo (billig :-) ) und werde versuchen, damit klar zu kommen. Blöd - ist aber halt so, andere werde ich mir "just for fun" nicht kaufen. Wenn man den Pixel-Takt weit genug heruntersetzt dürfte das auch ohne große Probleme funktionieren. Man muss halt ein wenig optimieren (z. B. Deine Bit-Schieberei zur Datenübernahme durch die Übernahme von 2 Halbbytes ersetzen etc.). Mal schauen, was so herauskommt ...
Hallo, Dieter F. schrieb: > Ich habe nur Kameras ohne FiFo (billig :-) ) und werde versuchen, damit > klar zu kommen. Blöd - ist aber halt so, andere werde ich mir "just for > fun" nicht kaufen. hatte ich eigentlich auch, mein Bekannter hatte aber mal eine mit FiFo gekauft und auch nie wirklich genutzt. Die ist nun erstmal bei mir. :) Es könnte prinzipiell ohne FiFo gehen, aber: soweit ich bisher gefunden habe, kann die Kamera keine Snapshot-Modus oder ich habe es bisher übersehen. Wenn es so ist, kann man den Kamera-Speicher nicht in Teilstücken auslesen. Sonst würde der Trick wie bei der (eigentlich genauso) alten DC3840 gehen: Buffer abholen und Bytes mitzählen, 128 Byte übernehmen, rausschicken und dann den Buffer wiedér ab Anfang auslesen und mitzählen bis zu den nächsten 128 Byte. Die DC3840 gibt aber JPEG seriell mit 921kBaud aus, das hat dann letztlich selbst ein Mega32 ohne Verluste einlesen und mitzählen können. Ich schau da aber nochmal genauer ins Datenblatt der OV7670. Gruß aus Berlin Michael
Michael U. schrieb: > soweit ich bisher gefunden > habe, kann die Kamera keine Snapshot-Modus oder ich habe es bisher > übersehen. > Wenn es so ist, kann man den Kamera-Speicher nicht in Teilstücken > auslesen. Muss ja auch nicht. Wenn man den Pixel-Takt mit Prescaler 32 (eigentlich 31 + 1 Vorgabe) versieht, dann hat man (bei 16 MHz Systemtakt und 8 MHz Kamera-Takt) 64 Zyklen Zeit, ein Byte zu "verwursten". Das sollte eigentlich ausreichen. Das sind dann halt keine 30 FPS mehr sondern eher rund 0,5 FPS :-). Von da an kann man sich "hochtasten" und optimieren - mal schauen, wie weit das möglich ist.
Hallo, 64 Zyklen reichen aber nicht, um das Byte zu "verwursten". Du mußt das ja irgendwohin befördern, also z.B. seriell senden. Ram ist ja nicht genug da. Wenn Du es direkt in den UART schickst, bist Du bei mehr als 1MBaud. Ich laß mich da aber gern überraschen. Gruß aus Berlin Michael
Michael U. schrieb: > Wenn Du es direkt in den UART schickst, bist Du bei mehr als 1MBaud. 1MBaud habe ich schon mal übertragen, 2MBaud kann der ATMega328 max. - schaun mer mal :-) Ich will eigentlich auch gar nicht an den PC übertragen - das ist für mich ziemlich sinnfrei, da es billige USB-Kameras gibt. Aber als poc irgendein LCD ansteuern hat für mich "Charme" :-). Da werde ich mir ein mit SPI ansteuerbares Teil suchen (aus meinem Fundus) und das Bild als s/w-Krüppel oder auch in Farbe ausgeben. Um das zu erreichen muss man die Register der Kamera verstehen und korrekt einstellen können. Ich lese mich noch ein und spiele herum :-). Dauert etwas, da ich auch noch "andere Regierungsaufgaben" habe.
Hallo, Dieter F. schrieb: > Ich will eigentlich auch gar nicht an den PC übertragen - das ist für > mich ziemlich sinnfrei, da es billige USB-Kameras gibt. Aber als poc > irgendein LCD ansteuern hat für mich "Charme" :-). Da werde ich mir ein > mit SPI ansteuerbares Teil suchen (aus meinem Fundus) und das Bild als > s/w-Krüppel oder auch in Farbe ausgeben. ok, als Vorhaben akzeptiert, ich wünsche Dir Erfolg und laß mich etwas teilhaben. Display vielleicht das 1,8" 128x160 mit dem ST7735 Controller, wenn es in Deinen Vorräten ist. Dieter F. schrieb: > Um das zu erreichen muss man die Register der Kamera verstehen und > korrekt einstellen können. Ich lese mich noch ein und spiele herum :-). Naja, da diskutiere ich auch noch mit der OV2640 am ESP32 rum, allerdings basierend auf dem Espresif-Demo. Mir ist da die Umschaltung der Auflösung noch nicht sauber gelungen, irgendwelche anderen Registereinstellungen müssen da wohl auch noch angepasst werden. Vielleicht probiere ich auch Deine Idee einfach mal aus... Gruß aus Berlin Michael
Hallo,
ich bin zurück und wieder voller Tatendrang. Habe den Morgen auch damit
verbracht, einen Fehler im Timing des Fifos zu suchen und.... siehe
da... Da habe ich wohl im Eifer meines Code umwerfens vergessen die
funktion zum "read pointer reset" aufzurufen..... kein Wunder, dass nur
unreproduzierbarer Müll rauskommt....
Jetzt "reagiert das Bild wenigstens auf Abdunkeln und Belichten der
Kamera.
Aber irgendetwas scheint trotzdem nicht zu funktionieren...
ich habe jetzt probeweise das Beschreiben des FIFOs deaktiviert. jetzt
sollte ja nach meinem Verständnis immer das gleiche Bild beim Auslesen
erscheinen (auch wenn man weniger von Bild als von Muster reden sollte).
Tut es aber leider nicht. Daher die Frage:
Hat jemand von euch schon Erfahrungen mit dem AL422B gemacht? oder kann
mir sagen worauf ich achten muss?
> Dauert etwas, da ich auch noch "andere Regierungsaufgaben" habe.
:D schön formuliert... das geht mir leider auch schon so...
Angehängte Dateien:
-

20190127_122258.jpg
240 KB
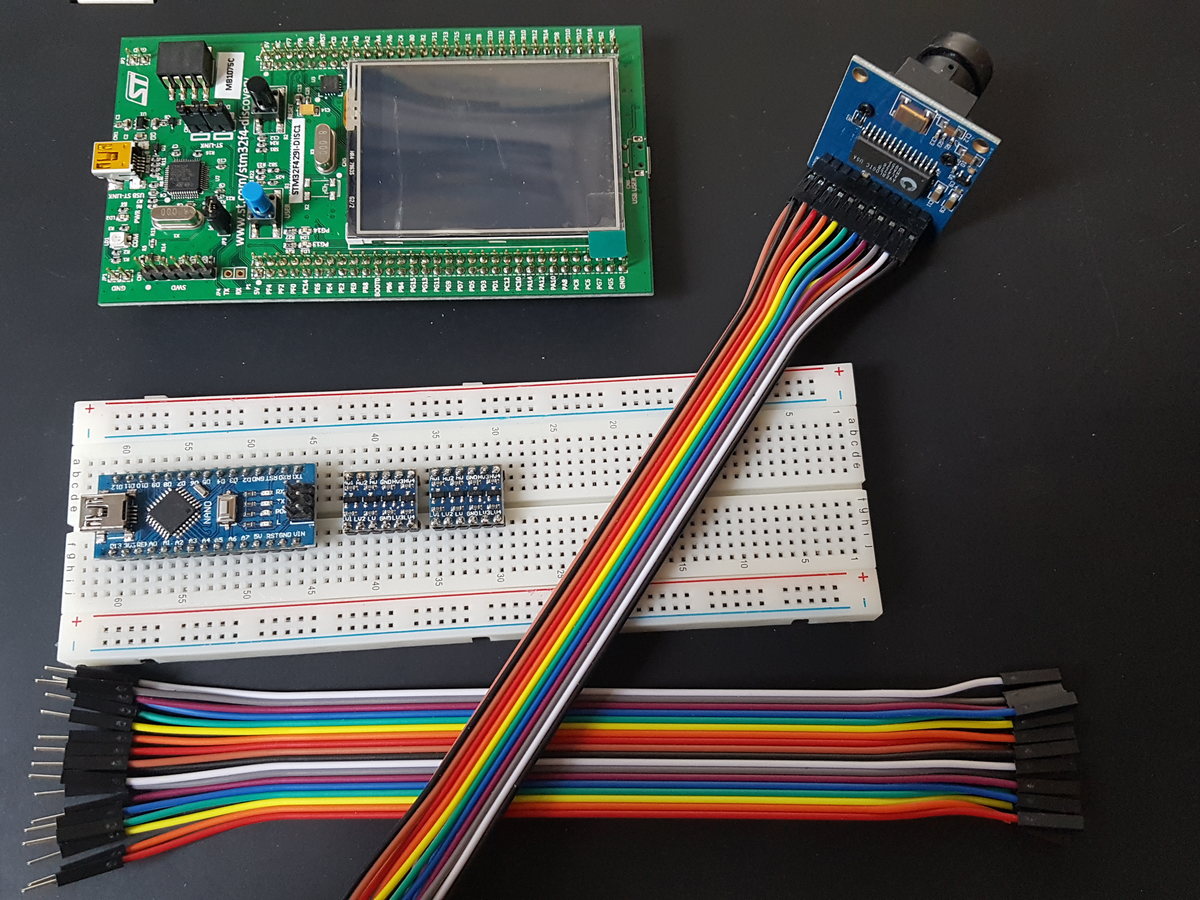
Hi David, Michael U. und Dieter F., ich habe inzwischen eigentlich alles Zeugs zusammen, um David's Schaltung nachzubauen (siehe Foto), aber ich bringe es einfach nicht über's Herz, meine sauer erkämpften, wenigen freien Bastelstunden in AVR-Technik zu investieren - bitte seht's mir nach. Wer einmal ARM gemacht hat, will nie wieder zurück ... Also werde ich versuchen, den AL422B am ganz oben abgebildeten STM32F4 Discovery Board (mit einem STM32F420ZI ARM-Prozessor) ans Laufen zu bringen. Ich habe dieses Board mit Absicht gewählt, a) weil ich es herumliegen hatte, b) weil ein ARM-Prozessor draufsteckt, c) weil es auf 3,3V läuft und ich keine Level-Shifter benötige, d) weil dort schon ein ILI9346-Display draufklebt. Mit dem Display kann ich die Ergebnisse etwas einfacher und direkter testen und spare weiteres Kabel-Wirrwarr. Bitte seid trotzdem nicht traurig, denn ich werde ja dieselben AL422B/OV7670-Protokollhürden zu nehmen haben, wie Ihr. Wir können also trotzdem alle voneinander lernen (wenn ich denn überhaupt etwas zustande bringe ...). Mal sehen, wie weit ich komme - tempus fugit. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > ich habe inzwischen eigentlich alles Zeugs zusammen, um David's > Schaltung nachzubauen (siehe Foto), aber ich bringe es einfach nicht > über's Herz, meine sauer erkämpften, wenigen freien Bastelstunden in > AVR-Technik zu investieren - bitte seht's mir nach. ich kann mir da zwar mehr Zeit für die Geschichte nehmen (obwohl, Rentner haben niemals Zeit...), trotzdem wird sich meine Beteiligung ja auch auf Nachvollziehen seiner Versuche und Hilfestellung bei Fehlersuche u.ä. beschränken. Ich finde für die OV7670 am AVR für mich einfach keinerlei praktischen Nutzen, die Teile liegen aber rum, seine Software zu flashen und mal reinzuschauen, sehe ich da nicht als Aufwand an. Wie schon mehrfach erwähnt, habe ich ja die OV2640 am ESP32 als aureichende Beschäftigung, obwohl die z.Z. wegen anderer "Projekte" auch mehr rumliegen. Ein Display direkt an der Kamera wäre da auch bei mir nur zum Experimentieren sinnvoll, mit den kleinen OV2640/ESP32 Modulen kann ich die Bilder per WLAN verschicken und den Odroid Go als Monitor. Das läuft ja prinzipiell auch schon, nur nicht so, wie ich es mir vorstelle. ;) Die Links zu dem Kram hatte ich nja im Thread scon mal gepostet. Gruß aus Berlin Michael
> Mal sehen, wie weit ich komme - tempus fugit. So, der Tag ist mehr als vorbei ... Zwischenergebnis: - Mein STM32F429I Discovery-Board ist präpariert (ich musste erst einmal den ST-Link in einen J-Link umflashen (ARM-Insider werden verstehen, was ich damit meine) - Sodann habe ich erstmals eine für mich neue IDE - nämlich Embedded Studio von SEGGER ausprobiert (wow - unglaublich das Teil!). Zum Glück war der Umstieg von meiner alten IDE (emIDE) nicht wahnsinnig schwierig, da sich beide ziemlich ähneln. - Sodann ging's ans Code-Migrieren: LCD-Display kann ich ansteuern, d.h. Pixel kann ich einzeln setzen Später will ich den FiFo auslesen und auf das Display schreiben - erstmal Pixel für Pixel. - Die Verkabelung hat ewig gedauert: OV7670+AL422B-FiFo sind teilweise mit dem Board verbunden. VCC, GND, SIOC, SIOD, VSYNC, HREF - mehr noch nicht. - SCCB scheint zu funktionieren. Auslesen von Registerwerten ergibt plausible Ergebnisse. Zum Schreiben von Registern hatte ich noch keine Zeit. Bevor David jetzt ganz blass wird: nein - ich war nur deshalb so schnell, weil ich ja vor >1 Jahre schon einmal die OV7670 Camera an einem identischen Board so halb am Laufen hatte. Habe also hauptsächlich Coderecycling betrieben und mich mit dem Aufsetzen von Dingen beschäftigt, die in meiner alten IDE schon liefen, in der neuen aber noch nicht. Das Tolle an ARM und der verwendeten IDE: - Ich kann nun hardwarmäßig debuggen (und dabei Register und Variablen auslesen) - Ich kann print-Statements verwenden - Ausgabe landet im Debugger - Flashen geht sehr schnell (<2s) Jetzt kann ich als nächstes das Auslesen des FIFOs angehen. Wenn jemand Lust hat, mir die Vorgehensweise dafür zu schildern, so würde das vermutlich viel Zeit und Recherche ersparen. Aber jetzt fängt erst einmal die Woche wieder an und das Büro freut sich auf mich. Das heißt: Adieu OV7670 ... Viele Grüße Igel1 PS: @Michael U. : ja, Du bist offensichtlich in Sachen Kameras ein ganzes Stückchen weiter als wir - nett, dass Du hier Tipps gibst!
Hallo, Andreas S. schrieb: > - Mein STM32F429I Discovery-Board ist präpariert (ich musste erst einmal > den ST-Link in einen J-Link umflashen (ARM-Insider werden verstehen, > was ich damit meine) Das hättest Du nicht schreiben sollen... ;) Ich habe da als ARM-Outsider bestimmt noch mal eine Frage an Dich. Ich mußte wiedermal sinnlos Geld ausgeben: Beitrag "Arduino Custom Firmware für Fitness Armband mit NRF52" Andreas S. schrieb: > PS: @Michael U. : ja, Du bist offensichtlich in Sachen Kameras ein > ganzes Stückchen weiter als wir - nett, dass Du hier Tipps gibst! Es ist nur Spaß am Experimentieren. Meine erste echte Kamera-Begenung war eine TFK500 https://www.google.com/search?q=Kamera+TFK500&tbm=isch&source=univ&client=firefox-b&sa=X&ved=2ahUKEwjovKOz_I_gAhVNYlAKHVgADb0QsAR6BAgGEAE&biw=1484&bih=840 Dazu ein diskreter 4 Bit AD-Wandler mit 2 Komparatoren und Zählerlogik am Userport vom C64. Nach rund 3 Minuten hatte ich dann ein Bild 160x200 mit 4 Graustufen. Gibt es leider nichts mehr davon, muß um 1988 gewesen sein. Gruß aus Berlin Michael
Hi David, hi Leute, nach Studium des Datenblattes vom AL422B: (https://www.enrgtech.co.uk/buy/product/ET16818568/AL422B-PBF) (Achtung: achtet darauf, irgendwo die aktuellste Version aufzutreiben) ... bin ich jetzt doch einigermaßen irritiert. Dort steht zu lesen:
1 | 8.3.1 Irregular Read/Write |
2 | It is recommended that the WCK and RCK are kept running at least 1MHz at all times. The faster one of WCK and RCK is used as the DRAM refresh timing clock and has to be kept free running. When irregular FIFO I/O control is needed, keep the clock free running and use /WE or /RE to control the |
3 | I/O as follows: [... dann folgt ein Bild ...] |
Außerdem lese ich in Kapitel "7.4 AC Characteristics":
1 | Trc (RCK Cycle Time) min. 20 max. 1000 ns |
Da Trc laut den nachfolgenden Bildern die Periodenlänge von RCK, also der Read Clock ist, bedeutet das eindeutig: Der minimale Takt zum Auslesen der AL422B beträgt 1MHz. Das würde den gesamten Vorteil, den der FiFo bringen soll: nämlich schnelles einlesen der Daten von der Kamera und (beliebig) langsames Auslesen der Daten aus dem FiFo durch den Mikrocontroller ad absurdum führen. Wäre wenigstens der "Read Enable" Pin [/RE] auf dem Modul nach draussen geführt, so könnte man den Auslesevorgang zumindest ab und an anhalten, um kurz Luft zu schnappen (dabei liegt der Lesetakt weiterhin am AL422B an, aber dessen Adresszähler wird angehalten). Das ist allerdings nicht der Fall - schöne Fehlkonstruktion. Da Dein ATmega 328p zudem kaum Speicher hat, müsstest Du Daten somit mehr oder weniger mit dieser Rate auch über den UART schicken. Ist das so von Dir geplant? Hmmm ... bin ratlos bis irritiert, wie Du mit dem AL422B das Geschwindigkeits-Bottleneck des Prozessors umschiffen kannst. Das könnte schwierig werden - zumindest, wenn Du die Spezifikation einhalten möchtest. Allerdings will ich nicht ausschließen, dass ich mich irgendwo dramatisch vertan habe - mir kommt diese 1MHz-Beschränkung im Read Clock absolut spanisch vor, denn der Refresh-Zyklus für das DRAM im AL422B wird angeblich vom jeweils höheren Takt (also WCK oder RCK) abgeleitet. Da sollte es dem DRAM doch egal sein, wenn der RCK-Takt z.B. nur mit 1KHz getaktet wird - solange WCK > 1MHz ist. Dumm dabei ist nur, dass das Datenblatt etwas anderes sagt, nämlich "It is recommended that the WCK and RCK are kept running at least 1MHz at all times." Dort steht expliztit NICHT "WCK or RCK are kept > 1MHz" sondern "WCK and RCK are kept > 1MHz". Soweit die schlechten Nachrichten. Und nun die guten Nachricthen: wenn Du auf die Spec pfeifst, so fand ich hier einen Bericht von jemandem, der den AL422B angeblich super langsam ausgelesen hat (so jedenfalls seine Worte): https://www.eevblog.com/forum/microcontrollers/how-to-reduce-the-data-rate(ov7670-al422b(fifo)-camera-module)/msg314703/#msg314703 Und hier sein Projekt: http://www.rpg.fi/desaster/blog/2012/10/20/ov7670-fifo-msp430-launchpad/ Da ich gerade bin bisschen zu bequem bin, Deinen Code zu lesen, frage ich einfach mal: mit welcher Taktrate liest Du den AL422B aus? Sollte die Rate < 1MHz liegen, so frage ich direkt: hast Du dabei Bedenken, oder kennst Du andere Berichte, die ebenfalls mit niedrigerer Taktrate erfolgreich ausgelesen haben? Und noch etwas: ich habe einen 12MHz Quarz auf meinem OV7670+FiFo AL422B - Modul entdeckt. Habt Ihr auch einen 12MHz Quarz oder habt Ihr tatsächlich einen 24MHz Quarz? Es scheinen da einige unterschiedliche Modul-Versionen im Umlauf zu sein ... mit jeweils unterschiedlichen Schaltbildern. So scheint bei mir z.B. kein Widerstand zwischen SDA (bzw. SIO_D) und VCC zu stecken - hab's nachgemessen. Ich vermute daher eher, dass ich dieses Modul hier habe: http://www.haoyuelectronics.com/Attachment/OV7670-Module-A/CMOS_FIFO%20schematic.pdf Welches Modul habt Ihr? Fragen über Fragen - wäre supernett, wenn Ihr ein paar meiner Fragen beantworten könntet, dann können wir uns etwas besser "aufsynchronisieren". Viele Grüße Igel1
Andreas S. schrieb: > Und nun die guten Nachricthen: wenn Du auf die Spec pfeifst, so fand ich > hier einen Bericht von jemandem, der den AL422B angeblich super langsam > ausgelesen hat (so jedenfalls seine Worte Ich lese das etwas anders - er hat das Bild super-langsam an den PC bzw. das dortige Python-Programm gegeben. Gelesen hat er mit seinem schnellen MSP ... "120mhz with 64KB memory), which was necessary to be able to process the signals in time."
@Dieter F.: Bitte den gesamten Absatz lesen, dort steht:
1 | In my previous experiment I used a quite powerful LPC1769 microcontroller (running at |
2 | |
3 | 120mhz with 64KB memory), which was necessary to be able to process the signals in time. |
4 | |
5 | This time however, thanks to the FIFO memory, the heavy hardware requirements are gone. For this reason I thought it might be fun to use the least powerful MCU I have around, which happens to be the MSP430. |
=> Er hat das Auslesen mit einem MSP430 realisiert - das ist nun wahrlich keine Rennmaschine. Und im weiteren Verlauf ist zu lesen, dass er die Daten (die er ja kaum im MSP430 wird zwischenspeichern können) via UART bei gemütlichen 115200 baud überträgt. Viele Grüße Igel1
Hallo, na toll, ich soll also Datenblatt lesen... ;) AL422B Revision 1.5 biete ich erstmal als Datenblatt an? Mindesttakt ist erstmal schon klar, ist ja DRAM drin. Erfahrungsgemäß halten die die Daten auch, wenn man relativ lange nicht refresht. Müßte man mal Testen, einfach mehrfach auslesen und vergleichen mit anhalten von RCK/WCK für verschiedene Zeiten. Beleibt beim C64: Bild laden und anzeigen. C64 aus und wieder ein und den VIC-Zeiger wieder auf die Grafik und schauen, wieviel schon kaputt ist. 1s klappte eigentlich immer ohne gekippte Bits... Ich muß mir das aber alles erstmal anschauen. Als Gedankenansatz: RCK läuft durch. Mit /RRST Lesezeiger auf Anfang, 128 Byte einlesen und verarbeiten. Dann wieder Lesezeiger auf Anfang, RCK mitzählen und die nächsten 128 Byte holen usw. Das war im Prinzip die Version damals mit der DC3840 um die 921kBaud von der Kamera durch den AVR in den Websever zu schaffen und den Ethenet-Buffer des ENC rauszuschicken wenn der voll war. Dauerte eben so seine Zeit, klappte aber zuverlässig. PS: gestern erstmalig mit ST-Link "gekämpt", war ja bisher bei mir ARM dran oder eher ARM ab? Gruß aus Berlin Michael
Andreas S. schrieb: > => Er hat das Auslesen mit einem MSP430 realisiert - das ist nun > wahrlich keine Rennmaschine. Und im weiteren Verlauf ist zu lesen, dass > er die Daten (die er ja kaum im MSP430 wird zwischenspeichern können) > via UART bei gemütlichen 115200 baud überträgt. Ja - zu schnell überflogen, sorry - bin "im Dienst" :-)
Michael U. schrieb: > na toll, ich soll also Datenblatt lesen... ;) Ja, ja - das Leben ist hart und ungerecht ... :-) > AL422B Revision 1.5 biete ich erstmal als Datenblatt an? Hui - scheint ziemlich neu - bitte mal hier verlinken. Ist die Revision neuer als die hier: https://www.enrgtech.co.uk/buy/product/ET16818568/AL422B-PBF ? > 1s klappte eigentlich immer ohne gekippte Bits... Na ja - ich bin eigentlich ein Freund davon, innerhalb der Specs zu bleiben, denn sonst wird's unberechenbar. > Ich muß mir das aber alles erstmal anschauen. > Als Gedankenansatz: RCK läuft durch. Mit /RRST Lesezeiger auf Anfang, > 128 Byte einlesen und verarbeiten. Dann wieder Lesezeiger auf Anfang, > RCK mitzählen und die nächsten 128 Byte holen usw. In der Tat: das war auch mein erster Ansatz, wenn man RCK durchlaufen lassen muss und keinen Zugriff auf /RE hat. Unterm Strich vergeudet der Ansatz allerdings wahnsinnig viel Zeit, weil man z.B. 479 Zeilen lang warten müsste, um Zeile 480 von einem VGA-Bild ausgeben zu können. Inzwischen kam mir folgender alternativer Ansatz in den Sinn: Den Adresszähler des FiFo's ständig durch den FiFo "durchlaufen" lassen und ab und an (in regelmäßigen Abständen) immer wieder kleine Datenpakete herausnehmen und diese per UART übertragen. Das wäre quasi ein Interleave-Verfahren: Beispiel dafür: Man geht wie mit einem Kamm durch einen Bilder-Frame im FiFo und kämmt z.B. Zeile 1, 11, 21, 31, ... 461, 471 heraus und überträgt jedesmal die besagte Zeile. Für die Übertragung einer Zeile hat man in diesem Beispiel jeweils weitere 9 Zeilen Zeit, was sogar einigermaßen passen würde, wenn die UART Baudrate 115200 beträgt und RCK mit 1MHz läuft. Beim nächsten Durchlauf würde man dann die Zeilen 2,12,22,32, ...462, 472 übertragen, u.s.w. Selbstverständlich muss man nicht unbedingt ganze Zeilen in einem Rutsch übertragen, sondern wird die Anzahl der herausgepickten Daten an den verfügbaren Puffer des MC anpassen wollen. Vorteil gegenüber dem ersten Ansatz: man kann die UART quasi dauerhaft "unter Feuer" halten und muss nicht 479 Zeilen lang auf Zeile 480 warten. > PS: gestern erstmalig mit ST-Link "gekämpt", war ja bisher bei mir ARM > dran oder eher ARM ab? Ich muss schon sagen: Du schreckst vor nichts zurück! Willst Du Dich tatsächlich in ARM einarbeiten? Wenn ja, so hätte ich vielleicht ein paar Tipps für Dich (wenngleich ich auch kein ARM-Profi bin): Einer der Tricks wäre, Dich nicht mit ST-Link abzugeben, sondern direkt den ST-Link auf Deinem Board (welches hast Du?) in einen J-Link umzuflashen. Übertrage einfach vor dem Flashen ein größeres Image in den ARM-Prozessor und nach dem Flashen nochmals, dann verstehst Du sofort einen der Gründe, warum J-Link so viel besser ist. Auf den Seiten von Segger findest Du die passende Anleitung dafür: https://www.segger.com/products/debug-probes/j-link/models/other-j-links/st-link-on-board/ Schreibe mal, was Du mit ARM schon gemacht hast und was Du noch vorhast. Viele Grüße Igel1
Dieter F. schrieb: > Ja - zu schnell überflogen, sorry - bin "im Dienst" :-) Kein Problem: Du hast die ersten 3 Zeilen aus dem Artikel gelesen und ich die nächsten - das war klassische Arbeitsteilung :-)
Hallo, Link zum Datenblatt: https://datasheetspdf.com/datasheet/AL422B.html Hmmm scheinen identisch zu sein, nur meins heißt AL422B? Deine FiFo Überlegungen gefallen mir auch, wenn ich das real teste dann schon aus Prinzip auf einem ATMega238. Ich muß mir das aber erst in Ruhe anschauen und mal Takte zählen. Andreas S. schrieb: >> PS: gestern erstmalig mit ST-Link "gekämpt", war ja bisher bei mir ARM >> dran oder eher ARM ab? > > Ich muss schon sagen: Du schreckst vor nichts zurück! > Willst Du Dich tatsächlich in ARM einarbeiten? Siehe meinen Link weiter oben von 28.01.2019 09:05. Ich will nicht direkt, aber alels, was sich aus der ArduinoIDE programmieren läßt, hat für mich erstmal eine sehr geringe Einstiegshürde. Andreas S. schrieb: > Schreibe mal, was Du mit ARM schon gemacht hast und was Du noch vorhast. Nichts. Gestern viel mir dann noch ein, daß ich irgendwo mal ein Nucleo-Board gakauft hatte, das nach etwas suchen auch wieder auftauchte. Hat den Vorteil, daß ich also auch einen Original ST-Link verfügbar habe. Das China-Teil hat sich zwar ordentlich gemeldet, ließ sich aber nicht updaten. Nach der Fehlermeldung beim Update ist es auch nicht mehr erreichbar bis zum Abstecken/Anstecken. Ist mir im Moment aber erstmal egal, die Uhr ist angekommen und lädt gerade Akku, dann kann ich sie in Ruhe kaputt machen. ;) Das Nucloe-Board speilt zumndest mit der ArduinoIDE, wenn auch erstmal nur ein Blink-Sketch für die LED geflasht. Ob ich da mehr mit den STM oder den nRF mache? Keine Ahnung.Ob ich mir da eine sinnvolle IDE für installiere hängt einfach von einem Projekt ab, das mir vielleicht noch in den Sinn kommt. Eigentlich bin ich aber mit dem ESP32 gut ausgelastet. Gruß aus Berlin Michael
@Michael U.: Ja, mit dem Datenblatt hast Du den Vogel abgeschossen -
scheint tatsächlich die neueste Version zu sein.
Was Deine NRF52832-basierende Uhr angeht, so scheint das ebenfalls ein
interessantes Projekt zu sein - ach hätte der Tag doch nur 32 Stunden
...
Aber nun back to business:
Habt Ihr schon einen Vorschlag für eine Reihenfolge, in der wir die
Leitungen des OV7670+FiFo - Moduls ansteuern sollten, um:
1.) einen Frame aus dem OV7670 in den AL422B zu laden?
2.) den Frame aus dem AL422B wieder herauszulesen?
(erst einmal ganz grundsätzlich N Bytes ab Adresse 0 herauslesen)
Ich würde diese Vorgehensweise gerne zunächst in Pseudocode
aufschreiben, bevor ich loslege.
Alternativ könnte ich vielleicht auch einmal in David's Code spicken ...
(Wo ist eigentlich David abgeblieben?)
Viele Grüße
Igel1
> (Wo ist eigentlich David abgeblieben?) Der baut gerade schon wieder Überstunden auf... und die Pendellei killt den Rest vom Tag... Wenn man dann noch im Sportverein tätig ist schafft man es an den heimischen PC erst um 23:30 :D... Aber auf euch ist ja Verlass und ich bin begeistert über eure Einwände und Vorschläge. Was mir nicht bewusst war, war die sache mit dem DRAM und dass der FIFO offenbar den Inhalt verliert.... darüber habe ich mir nie Gedanken gemacht und war der Meinung der Reset meines Read Pointers funktioniert nicht... -->Anfänger... Hier fehlen mir wohl noch die Grundlagen, die ich mir dann wohl die nächsten Tage versuche anzulesen. Was das Datenblatt angeht hatte ich Version 1.01... somit werde ich dann jetzt auch mal auf das neue umsteigen. Was die Frequenz des Betreiben angeht, habe ich mich an folgenden Satz geklammert: "...The faster one of WCK and RCK is used as the DRAM refresh timing clock and has to be kept free running." Das dann folgende Bild, schildert ja genau, wie man das Schreiben im irregular Mode dann händeln soll. Ich habe es dann naiv einfach angenommen, dass der auf dem Board verbaute Quarz (bei mir sind es auch 12MHz) die WCK steuert und die dann automatisch die schnellere ist. Das mit dem Write and Read (und nicht Or) ist mir auch schon aufgefallen, habe aber gehofft, dass dem einfach keine Beachtung geschenkt wurde. >Sollte die Rate < 1MHz liegen, so frage ich direkt: hast Du dabei >Bedenken, oder kennst Du andere Berichte, die ebenfalls mit niedrigerer >Taktrate erfolgreich ausgelesen haben? Bedenken habe ich keine :D Dafür fehlen mir einfach sämtliche Erfahrungswerte. Die Read rate liegt mit sicherheit unter 1Mhz, weil ich jede Zeile zunächst per Uart an den PC übertrage, wenn diese vollständig übertragen wurde, vom PC die nächste anfordere und dann erst sende. Aber da war mir die Sache mit dem flüchtigen Speicher noch nicht ganz klar. Dass werde ich mir (hoffentlich morgen) einmal anlesen. Werde auch gerne kurz erläutern wie es in meinem Code abläuft, damit ihr in dem Wirrwarr nicht lange suchen müsst ;-) aber jetzt bin ich erstmal reif fürs Bett.
Guten Tag, eine weitere Sache, die mir grade bei dem Studium des Datenblattes auffällt: Kapitel 8.3.2 Read Enable during Reset Cycles hier steht, dass der Read Enable während des RRST niemals low sein darf. Bei mir auf dem board ist der Pin garnicht nach außen geführt und wird somit von mir auch nicht gesteuert. Weiß da jemand was? Gruß David
David D. schrieb: > eine weitere Sache, die mir grade bei dem Studium des Datenblattes > auffällt: > > Kapitel 8.3.2 Read Enable during Reset Cycles Das ist Dir vermutlich deshalb nicht eher aufgefallen, weil genau dieses Kapitel in älteren Versionen des Datenblatts fehlte ... (daher hatte ich so geflissentlich auf die neueren Versionen verwiesen). > hier steht, dass der Read Enable während des RRST niemals low sein darf. > > Bei mir auf dem board ist der Pin garnicht nach außen geführt und wird > somit von mir auch nicht gesteuert. > > Weiß da jemand was? Ich kann Deine Beobachtung leider nur bestätigen (scharfes Auge, Kollege!): In der Tat ist der /RE Pin auch auf meinem Modul dauerhaft auf GND gezogen (hab's gerade mit dem Multimeter nochmals geprüft). Somit dürfte man lt. Datenblatt den /RRST niemals benutzen. Das bedeutet im Klartext: unser Board hat einen Designfehler. Da wir diesen ohne riesigen Lötaufwand wohl kaum beheben können, bleibt uns keine Wahl, als damit zu leben. Immerhin sind wir jetzt gewarnt und wissen, dass wir bei der Benutzung von /RRST evtl. nicht das von uns erwartete Ergebnis erhalten werden. Viele Grüße Igel1
Das kann ich leider nur Bestätigen. Bei betrieb habe ich noch eine Spannung von 0.2 V an dem Pin anliegen. Und auch in der Schematic die ich gefunden habe: https://www.beyondlogic.org/pdf/OV7670_FIFO_SCH_V1.pdf wird ~RE auf GND gezogen... Wie gehen wir jetzt weiter vor? :D Edit: Altes Datenblatt Seite 18 könnte uns retten. Allerdings finde ich diese Beschreibung im neuen nicht mehr.... Das ist doch zum Mäuse melken :D "8.3.4 One Field Delay Line (The Old Data Read) As the design shown in diagram by applying the reset every 1-field cycle (with the common signal for /WRST and /RRST) and a constant read/write operation (with all /WE, /RE and /OE are tied to ground), “1 field delay line” timing is shown in timing chart below"
Hallo, ihr seid also fleißig beim Datenblatt lesen. Ich habe im Moment nur mal recht kurz durch die (Arduino-)Welt geschaut. a) die OV7660 mit FiFo ist so aufgebaut, weil irgendjemand das mal so beschlossen hat. Ich habe bisher nur diese Modulversion gefunden, wo /RE fest auf GND ist. b) Der FiFo hat offenbar sein Datenblatt nicht gelesen. Demo-Souzrce, wo ich auf die Schnelle mal reingeschaut habe, ignorieren das und setzen den Pointer trotzdem mit
1 | digitalWrite(RRST, LOW); |
2 | PulsePin(RCLK, 1); |
3 | PulsePin(RCLK, 1); |
4 | PulsePin(RCLK, 1); |
5 | |
6 | void PulsePin(int PinNumber, int DurationMicroSecs) |
7 | {
|
8 | digitalWrite(PinNumber, HIGH); // Sets the pin on |
9 | delayMicroseconds(DurationMicroSecs); // Pauses for DurationMicroSecs microseconds |
10 | |
11 | digitalWrite(PinNumber, LOW); // Sets the pin off |
12 | delayMicroseconds(DurationMicroSecs); // Pauses for DurationMicroSecs microseconds |
13 | } |
auf Anfang. Auch die Clockverhältnisse von RCLK werden ziemlich ignoriert... Ich hoffe, auch nicht-Arduino-User können den Ausschnitt so verstehen. Ich habe mir da mal ein Beispiel rausgepickt und werde mir das wohl morgen mal praktisch anschauen, mal schauen, ob mein LA mit 80MHz da noch schnell genug ist. Ich denke, wir sollten da erstmal mit den Gegebenheiten leben, es scheint kein wirkliches Problem zu sein. @Andreas S. (igel1): bisher ist noch ARM dran. Die Uhr lebt noch und der Testketch aus dem anderen Thread ist drauf und läuft. Jetzt habe ich das Problem: was will ich eigentlich damit??? Mein Handy findet auch beim Scan das BT-Device, da muß mich mich auch erst schlau machen, was ich damit jetzt anfangen kann... Gruß aus Berlin Michael
Hi David, Michael (und eventuell auch ein bisschen Dieter, wenn Du noch dabei bist), habe inzwischen alles vorbereitet, um den Stier bei den Hörnern zu packen: - Das OV7670+FIFO - Modul ist mit meinem STM32F429 Discovery Board verkabelt. Das war bislang der zeitaufwändigste Akt von allem, denn fast alle Pins des MC's sind bereits mit irgendwelcher Peripherie auf dem Testboard verbunden. Das muss man sich erst einmal 17 Pins, die ich für Ansteuerung und Auslesen des OV7670+FiFo benötige, aus den Rippen schneiden. Hoffe, ich habe keine Fehler gemacht, sonst ist mein schönes Board dahin. - Inzwischen läuft auch Timer1 (von insgesamt 17 verfügbaren Timern!) auf dem STM32F429 im PWM-Mode und wirft mir einen schönen 1MHz-Takt raus, den ich in FIFO_RCK einspeise. - SysTick-Timer ist ebenfalls aufgesetzt - damit habe ich auch eine schicke Delay(ms)-Funktion. - Funktionen zum Pixelweisen Beschreiben des LCD's habe ich ebenfalls (okay, nicht selbst geschrieben, sondern ausgeliehen - vgl. eines meiner letzten Postings). - Sodann habe ich die folgenden Funktionen implementiert:
1 | void InitControlPins(); |
2 | uint8_t Read_VSYNC(); |
3 | uint8_t Read_HREF(); |
4 | uint8_t Read_FIFO_Data() |
5 | void Write_FIFO_WR(BitAction BitVal); // BitVal: Bit_SET or BIT_RESET |
6 | void Write_FIFO_OE(BitAction BitVal); // BitVal: Bit_SET or BIT_RESET |
7 | void Write_FIFO_WRST(BitAction BitVal); // BitVal: Bit_SET or BIT_RESET |
8 | void Write_FIFO_RRST(BitAction BitVal); // BitVal: Bit_SET or BIT_RESET |
Ich hoffe, ich habe nichts vergessen ... Das Brot- und Buttergeschäft ist also erledigt, jetzt kann der schönere Teil beginnen: nämlich die eigentliche Logikimplementierung. Nur leider ruft jetzt, wo's gerade spannend wird, schon wieder die Pflicht ... Aber so ist das mit dem Hobby - es kommt irgendwie immer zu kurz - jedenfalls gefühlt :-) Bis denne Igel1 PS: @Michael: Du hast eine Fitnessuhr erworben und fragst "Jetzt habe ich das Problem: was will ich eigentlich damit???" Hmmm, ich würde vorschlagen, Du machst ein bisschen Fitness damit ... (Programmier-Fitness oder körperliche Fitness - das überlassen wir jetzt mal Dir :-)
Andreas S. schrieb: > (und eventuell auch ein bisschen Dieter, wenn Du noch > dabei bist) Bin ich - nur langsamer und ohne Fifo :-) Ich lese auch Datenblätter und überlege, wie ich am Besten vorgehe. Für mich ist der Fifo nur ein Hilfsmittel, um langsamer auslesen zu können. Alles andere - speziell die Ansteuerung der Kamera - sollte sich nicht sehr unterscheiden.
Hallo Dieter, schön, dass Du noch mit dabei bist! Kameraansteuerung mit SCCB funktioniert schon bei mir. Aber an den richtigen OV7670-Registerwerten wäre ich wahnsinnig interessiert!! Mit "richtig" meine ich solche Registerwerte, die gute Bilder geben, denn da kann man bei der OV7670-Kamera ja problemlos an 200 mehr oder weniger undokumentierten Schrauben drehen. Habt Ihr solche Werte schon irgendwo im Netz abgreifen können? Selberforschen ist mit diesen OV7670-Datenblättern wie Blinde-Kuh-Spielen. Und der neugierdehalber: Wie/womit programmierst Du? Mit Arduino-IDE auf Arduino-Nano (so wie David, unser Eiskalt-Duscher)? Oder mit Atmel-Studio in Assembler auf dem größten ATmega, den es gibt? (das wäre eher die Lauwarm-Duscher Variante). Ich selber bin mit meinem 180MHz ARM-Prozessor natürlich ein Voll-Warmduscher :-) Viele Grüße Igel1
Andreas S. schrieb: > Wie/womit programmierst Du? Um kompatibel zu sein mit C und Atmel Studio auf ATMega328P (Arduino Nano Hardware) - das ist zwar eine Krücke, aber auch eine Herausforderung :-). Normalerweise würde ich mit ausreichend Ports und DMA arbeiten (ATXMega) oder idealerweise einen STM mit entsprechender Anschlussmöglichkeit (es gibt welche mit "Kamera-Schnittstelle") nutzen - aber STM ist mir nicht geläufig und nur zum Spaß will ich mich da auch nicht einarbeiten. Es haben sich schon viele mit der Ansteuerung beschäftigt und fast alle nutzen Vorarbeiten von anderen (Register-Definitionen und -Werte) - da ist ein weites Feld. Noch bin ich nur am "rumspielen" und lesen - aber eine "normale" TWI-Anbindung funktioniert gut und mit 8MHz externem Takt läuft die Kamera auch ohne Probleme. Wie geschrieben suche ich nach Möglichkeiten, ohne Fifo mit dem 328P "vernünftige" Bilder zu bekommen und vielleicht wenigsten 1 FPS zu erreichen (ggf. interleaved, wie geschrieben).
Beitrag #5717113 wurde von einem Moderator gelöscht.
Hallo, ich famge mal hier an: Dieter F. schrieb: > Wie geschrieben suche ich nach Möglichkeiten, ohne Fifo mit dem 328P > "vernünftige" Bilder zu bekommen und vielleicht wenigsten 1 FPS zu > erreichen (ggf. interleaved, wie geschrieben). Ich hatte gestern meine alten Links mal durchgeschaut, die ich da mal gesammelt hatte. Dabei fielen mir zwei wieder auf auf: https://www.instructables.com/id/OV7670-Arduino-Camera-Sensor-Module-Framecapture-T/ http://privateblog.info/arduino-uno-i-kamera-ov7670-primer-ispolzovaniya/ Beide haben für uns meiner Meinung nach ein paar Vorteile als Anregung: es ist alles im Stück, es ist relativ überschaubar gegliedert, sie benutzen einen Mega328, sie benutzen OV7660 ohne FiFo. Ich werde wohl heute mal testen, was da real geht. Andreas S. schrieb: > Und der neugierdehalber: > > Wie/womit programmierst Du? > Mit Arduino-IDE auf Arduino-Nano (so wie David, unser Eiskalt-Duscher)? > Oder mit Atmel-Studio in Assembler auf dem größten ATmega, den es gibt? > (das wäre eher die Lauwarm-Duscher Variante). > > Ich selber bin mit meinem 180MHz ARM-Prozessor natürlich ein > Voll-Warmduscher :-) Ich trenne hier mal etwas anders: Eiskalt-Duscher als Prinzip für "siehste, es geht doch!" bei mir. Beim ATMega kpönnte ich auch auf den Mega1284 ausweichen, der größte, der hier rumliegt, da lassen sich fast alle auch stabil bis 25MHz übertakten (Mega328 meist auch). Xmega gibt es hier irgendwo einen der ersten (XPlain Demoboard, gekauft, kurz angetestet, nie was mit gemacht...). Nächste mögliche Runde wäre ein ST-Nucleo (habe ich ja wiedergefunden...) oder eben meine "geliebten" ESP32. ArduinoIDE ist eine Entscheidung zur Bequemlichkeit incl. der Einschränkungen. Bei AVR spielt es eigentlich keine Rolle, Studio-Sourcen lassen sich mit wenig Aufwand in die ArduinoIDE werfen und compilieren, Sketchordner "projektname" anlegen, alles wahllos da reinkopieren, die main.c in "projektname.ino" umbenennen, bei den .h Dateien noch einen Vorrat C++ - extern c Klammerei rumwerfen und dann geht es zu 99% schon. Ist nicht schön, aber selten... Für den ESP32 und die IDF-Projekte gilt prinzipeill das Gleiche, der Anpassungsaufwand ist aber etwas größer. Mit STM32 habe ich das wegen der kurzen Erfahrung mit Nucloe bzw. der nRF5-Uhr noch nicht probiert. Großer Vorteil für mich: nur eine "IDE" für alles, mit externem NotePad++ als Editor auch durchaus praktikabel. Man kann portable einfach mehrere auf dem Rechner haben und macht sich den Kram nicht gleich kaputt, weil man mal was ausprobiert. So, genug der Arduino-Werbung... Der Übergang zu Lauwarm-Duscher und Voll-Warmduscher wäre also eher fließend. Beim STM32 wäre es interessant, Du kannst mir ja mal Deinen STM-Code schicken und die Pinbelegung, wäre interessant, was da unter Arduino passiertt. Andreas S. schrieb: > Aber an den richtigen OV7670-Registerwerten wäre ich wahnsinnig > interessiert!! "Richtige" Registerwerte findest Du doch zu Hauf im Netz, schwieruger ist es, halbwegs brauchbar kommentierte Init-Sequenzen zu finden, das halte ich aber für ein grundsätzliches Problem. Mir sind schon genug Applikation-Beispiele für relativ komplexe ICs von den Hersteller begegnet, wo 50 Register initialisiert wurden und bei 45 davon keinerkei Kommentar stand, so nach der Devise "das muß man eben bei unserem Chip so machen". Ich habe mir bei meinen privaten Basteleien abgewöhnt, alles bis ins kleinste Detail zu hinterfragen. So, Roman zu Ende... Gruß aus Berlin Michael
Hallo, so, Roman 2.Teil, diesmal zum Thema: das Programm von http://privateblog.info/arduino-uno-i-kamera-ov7670-primer-ispolzovaniya/ compiliert bei mir nicht sinnvoll, einige Meckereien, zu groß für den Mega328. Ein Versuch, für den Mega2560 zu compilieren endete auch tragisch, ich hätte auch keinen hier gehabt. Also den anderen Link, ist ohnehin ausführlicher für mich. Sketch compiliert ohne Probleme, auf einen Arduino Nano geflasht. Nichts... Ein paar Debug-Ausgaben hinzugefügt: arduinounoinut() läuft durch, XClock, TWI und UART sind richtig initialisiert, mein eingefügtes "Ready" kommt im Ternimal sauber an. Hänger war bei camInit() und da beim ersten wrReg(). Logisch, wenn ich SDA und SCK vertauscht habe... Umsortiert und es kommen erstmal Massen an Daten im Ternimal an. Ich habe in SDA/SCK/XCLK Pegelwandler drin, weil die sowieso noch auf dem Steckbrett waren vom letzten Versuch vor Ewigkeiten. TeraTerm kann zwar prinzipiell 1MBaud und die Daten mitloggen, die Anzahl Daten zwischen zwei RDY passten aber nicht zu den erwarteten. Entweder ich bringe sein Java-Zeug mal in Gang (hane nichtmal ein SunJAVA drauf zur Zeit...) oder ich nehme mein letztens wieder installiertes uraltes VN6 und meine LogicAnalyzer-Software von vor x Jahren, da kann ich sicher 500kBaud und eigentlich auch 1MBaud einlesen und dann eben erstmal in eine Datei schreiben. Wenn die Byteanzahl passt kann ich es ja auch mal als RAW in Irfanview laden. Jetzt muß ich aber erstmal was sinnvolles machen... Auch als Rentner hat man niemals Zeit. ;) Gruß aus Berlin Michael
Angehängte Dateien:
-

177.bmp
230 KB

Ich habe das (las sich recht "ausgereift") ausprobiert, um zu sehen, ob die Kamera überhaupt Bilder liefert. http://acoptex.com/project/254/basics-project-052a-ov7670-camera-sensor-module-without-fifo-ram-at-acoptexcom/#sthash.IDGNJNcx.P8aXeyqc.dpbs Das gelbe vom Ei ist es nicht - ich musste das Timing auf 20 (O.K., ich habe grobe Schritte gemacht) einstellen, damit 2 von 3 Bildern mit 0,25 FPS in SW gut erkennbar waren (Beispiel anbei). Das Timing ist nicht gerade optimal, ein wenig Glückssache :-). Bestärkt mich in meinem "Interleaved-Ansatz" ... Michael U. schrieb: > http://privateblog.info/arduino-uno-i-kamera-ov7670-primer-ispolzovaniya/ > compiliert bei mir nicht sinnvoll, einige Meckereien, zu groß für den > Mega328. Übrigens sollte das Projekt auf der von mir verlinkten Seite mit Deinem Link (außer der Sprache :-) ) weitgehend übereinstimmen (zumindest wird entsprechend referenziert). Michael U. schrieb: > Entweder ich bringe sein Java-Zeug mal in Gang Muss nicht, in meinem Link ist auch ein Windows-EXE (leider schwächer im Vergleich zum Java-Empfänger) zur "Bildgebung" verlinkt. Die Kamera scheint sich übrigens sehr träge an die Helligkeit anzupassen - da ist wohl "Register-Arbeit" angesagt :-/ Fällt mir gerade so ein - ich habe ja in der Arduino-Umgebung gewildert. Könnte sein, dass der "Standard-Millis-Interrupt" dazwischen funkt.
Hallo, Dieter F. schrieb: > Übrigens sollte das Projekt auf der von mir verlinkten Seite mit Deinem > Link (außer der Sprache :-) ) weitgehend übereinstimmen (zumindest wird > entsprechend referenziert). ja, sind prinzipiell identisch, ich habe mal WinMerge drübergeschickt. Dieter F. schrieb: > Muss nicht, in meinem Link ist auch ein Windows-EXE (leider schwächer im > Vergleich zum Java-Empfänger) zur "Bildgebung" verlinkt. Wie meinst Du "schwächer"? Macht hier erstmal, was es soll, danke für den Hinweis auf die Win-Software. Ich habe im Moment erstmal das Problem mit senkrechten Kinien im Bild, da muß ich wohl nochmal meinen Drahtverhau genauer prüfen... Dieter F. schrieb: > Das Timing ist nicht gerade optimal, ein wenig Glückssache :-). Bestärkt > mich in meinem "Interleaved-Ansatz" ... Sehe ich eigentlich kein wirkliches Problem, 1MBaud geht, hat man 10 Bitzeiten bis der UART das rausgeschoben hat und nochmal 1 Byte weil UV ignoriert wird. Vielleicht schau ich mir mal das ASM-List an, das der Compiler baut, der dürfte aber captureImg() schon sehr brauchbar optimieren. Ich finde den Code selbst eigentlich gut strukturiert und nachvollziehbar. Ich werde das wohl mal mit David's Code "paaren", also z.B. seine SCCB-Routinen reinwerfen. Kann man ja schön sehen, was geht oder klemmt. Auch die FiFo-Version in den Code einzubauen sollte recht problemlos gehen. Naja, kommt Zeit kommt Source. ;-) Gruß aus Berlin Michael
Michael U. schrieb: > Ich habe im Moment erstmal das Problem mit senkrechten Kinien im Bild, > da muß ich wohl nochmal meinen Drahtverhau genauer prüfen... Nö, den Teiler (Register 0x11) z.B. auf 20 (wie ich) hochsetzen (die hatte ich auch). Das ist alles ein Timing-Problem ... Michael U. schrieb: > Wie meinst Du "schwächer"? Macht hier erstmal, was es soll, danke für > den Hinweis auf die Win-Software Die Bilder mit der .EXE sind deutlich schlechter, wie die Bilder mit der Java-Komponente. Michael U. schrieb: > also z.B. seine > SCCB-Routinen reinwerfen Nicht erforderlich - TWI/I2C funktioniert prima.
Michael U. schrieb: > Sehe ich eigentlich kein wirkliches Problem, 1MBaud geht, hat man 10 > Bitzeiten bis der UART das rausgeschoben hat und nochmal 1 Byte weil UV > ignoriert wird. Ja, da sind nur die kleine Unsicherheit der Reaktion des Schnittstellen-Partners und die harte Abfrage auf high-/low-Pegel beim Pixel-Takt. Mein "jedes 3. Bild ist Müll" hat schon eine Ursache - möglicherweise einfach nur "millis()".
Hallo, Dieter F. schrieb: > Nö, den Teiler (Register 0x11) z.B. auf 20 (wie ich) hochsetzen (die > hatte ich auch). Das ist alles ein Timing-Problem ... ok, 20 passt erstmal, da muß ich das Datenblatt mal genauer befragen, es geht eigentlich NUR 20 bei mir. Jedes 3. Bild Schrott bestätige ich auch erstmal. Bilddarstellung in der .exe ist mir noch ewas unklar. Ich habe nochmal mit TeraTerm ein Bild geholt und als RAW in Irfanview angezeigt. Das Bild aus der .exe ist etwas heller. Mein Fokus stand wohl völlig daneben, habe ich gerade mal etwas nachgestellt, muß ich morgen bei Vernünftiger Beleuchtung mal machen. Reicht für heute... Gruß aus Berlin Michael
Angehängte Dateien:
-

camtest.bmp
400 KB
Hallo, Dieter F. schrieb: > Michael U. schrieb: >> Sehe ich eigentlich kein wirkliches Problem, 1MBaud geht, hat man 10 >> Bitzeiten bis der UART das rausgeschoben hat und nochmal 1 Byte weil UV >> ignoriert wird. > > Ja, da sind nur die kleine Unsicherheit der Reaktion des > Schnittstellen-Partners und die harte Abfrage auf high-/low-Pegel beim > Pixel-Takt. Mein "jedes 3. Bild ist Müll" hat schon eine Ursache - > möglicherweise einfach nur "millis()". doch noch ein Nachtrag: am PC unter Win7 war zumindest die Auswahl an Terminalprogrammen nicht groß, die 1MBaud können und die Daten als binär-Daten in eine Datei schreiben. TeraTerm v6.9 macht es zumindest zuverlässig, wenn auch umständlich. Mit einer eigenen Empfangsroutine auf der COM sehe ich aber da kein Problem. Möglich, daß das Zusammenspiel beim USB-Seriell-Wandler da noch probleme machen könnte, sieht hier aber mit dem CH340 nicht danach aus, FTDI macht nach meiner Erfahrung da auch keine Probleme. milis() wird doch garnicht genutzt, Interrupts sind ohnehin komplett gesperrt. _delay_ms() beim AVR-GCC ist meiner Erinnerung nach eine busy-loop basierend auf F_CFU. Gruß aus Berlin Michael
Michael U. schrieb: > Also den anderen Link, ist ohnehin ausführlicher für mich. > Sketch compiliert ohne Probleme, auf einen Arduino Nano geflasht. Könntest Du netterweise "den anderen Link" ebenfalls hier einstellen? Und schön: Dieter hat lauffähigen Code im Internet aufgetrieben - der grundsätzliche Beweis, dass ein Atmega eine OV7670 Kamera auslesen kann, scheint damit schon einmal erbracht. Jetzt müssen wir es nur selber ebenfalls noch hinbekommen. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > Könntest Du netterweise "den anderen Link" ebenfalls hier einstellen? Hatte Dieter oben gepostet: http://acoptex.com/project/254/basics-project-052a-ov7670-camera-sensor-module-without-fifo-ram-at-acoptexcom/#sthash.IDGNJNcx.P8aXeyqc.dpbs Mein Link: https://www.instructables.com/id/OV7670-Arduino-Camera-Sensor-Module-Framecapture-T/ ist vom code für den UNO prinzipiell identisch und läuft genauso, bei Dieter war nur netterweise die Windows-exe für den Anzeiger dabei, mußte ich den JAVA-Kram nicht erst hier in Gnag bringen. > Und schön: Dieter hat lauffähigen Code im Internet aufgetrieben - der > grundsätzliche Beweis, dass ein Atmega eine OV7670 Kamera auslesen kann, > scheint damit schon einmal erbracht. Jetzt müssen wir es nur selber > ebenfalls noch hinbekommen. Prinzipiell sollte sich das auch auf dem STM32 so in Gnag bringen lassen, wenn man die Hardwareabhängigkeiten bei XCLK Erzeugung, Seriell und TWI anpasst. Gruß aus Berlin Michael
Andreas S. schrieb: > Und schön: Dieter hat lauffähigen Code im Internet aufgetrieben - der > grundsätzliche Beweis, dass ein Atmega eine OV7670 Kamera auslesen kann, > scheint damit schon einmal erbracht. Jetzt müssen wir es nur selber > ebenfalls noch hinbekommen. Ja - wobei ich schrieb, das das nicht optimal ist. Ich wollte lediglich wissen, ob die (meine) Kamera grundsätzlich "arbeitswillig" ist. Ist sie. Nach dem "keep it simple an stupid"-Prinzip werde ich mit QQVGA anfangen. 160 x 120 Pixel scheinen beherrschbar zu sein. Blöd ist, dass ich kein passendes PC-Programm dazu habe. Wen stört das - es gibt ja SPI-fähige-Displays :-)
Hallo, wow ... jetzt habt ihr mich erstmal abgehängt... Ich überlege, ob ich mir auch mal so ein Zeugs aus dem Internet drauf schmeißen soll, um meine Kamera zu testen, obwohl ich mir vorgenommen hatte, alles selbst in Gang zu bringen, um wirklich jedes Detail zu verstehen und zu lernen. Andreas S. schrieb: >Wie/womit programmierst Du? >Mit Arduino-IDE auf Arduino-Nano (so wie David, unser Eiskalt-Duscher)? >Oder mit Atmel-Studio in Assembler auf dem größten ATmega, den es gibt? >(das wäre eher die Lauwarm-Duscher Variante). Also das stimmt nicht ganz, ich mache es wie Dieter: >Um kompatibel zu sein mit C und Atmel Studio auf ATMega328P (Arduino >Nano Hardware) - das ist zwar eine Krücke, aber auch eine >Herausforderung :-). nur auf Arduino Uno Hardware (was aber im Prinzip das gleiche ist, nur mit weniger Pins nach außen geführt) aber ist beides der Atmega328 Dieter F. schrieb: Noch bin ich nur am "rumspielen" und lesen - aber eine "normale" TWI-Anbindung funktioniert gut und mit 8MHz externem Takt läuft die Kamera auch ohne Probleme. kannst du da villeicht deinen Source code zur verfügung stellen? das hatten wir hier "früher" auch schon versucht zum laufen zu bekommen (vergeblich...) meines erachtens wegen dem ACK, dass bei TWI und SCCB unterschiedlich ist. Vielleicht habe ich aber in meinem Code was übersehen gehabt. EDIT: Da flattert mir doch was ganz spannendes in die Hände (bzw. auf den Bildschirm) https://github.com/dalmirdasilva/ArduinoCamera/blob/master/CameraAL422B/datasheet/OV7670%20Implementation%20Guide%20(V1.0).pdf Das sieht mir auf den ersten Blick doch nach einer ausführlichen Registerbeschreibung aus und erklärt ebenfalls, dass man Auflösungen und Farbformate nicht beliebig mischen darf... (daher hatte ich erst recht keine Chance :D )
David D. schrieb: > Das sieht mir auf den ersten Blick doch nach einer ausführlichen > Registerbeschreibung aus und erklärt ebenfalls, dass man Auflösungen und > Farbformate nicht beliebig mischen darf... (daher hatte ich erst recht > keine Chance :D ) Jein - das ist auch noch nicht die "Wahrheit". Es gibt noch einen Software Implementation Guide - und ein hoch-geheimes etwas, was die Soll-Register-Einstellungen beinhaltet. Ich gehe auch erstmal nach den beiden ersten Beschreibungen vor und schaue, was dabei herauskommt. Bei den OV7670-Programmen haben anscheinend alle von irgendwem abgeschrieben - die gleichen sich bei der Register-Beschickung fast überall. David D. schrieb: > Dieter F. schrieb: > Noch bin ich nur am "rumspielen" und lesen - aber eine "normale" > TWI-Anbindung funktioniert gut und mit 8MHz externem Takt läuft die > Kamera auch ohne Probleme. > > kannst du da villeicht deinen Source code zur verfügung stellen? Da kannst Du Dir irgendeinen beliebigen Sourcecode nehmen - die haben sowieso (fast) alle nur kopiert. Ich werde "meinen" Weg gehen und schauen, ob dabei ein Bild (oder viele) herauskommen. Wenn ich erfolgreich bin teile ich - wenn nicht suche ich mir ein anderes Projekt :-)
Dann werde ich dem ganzen wohl noch eine Chance geben. Da ich mir nun durch irgendeine Änderung wieder als zerschossen habe, habe ich beschlossen jetzt die Dokumentations- und Aufräumarbeiten in meinem Code dieses Wochenende zu fokussieren. und werde ihn dann nochmal zur Verfügung stellen. Mein Ziel ist es weiterhin ein Bild an den PC zu senden und mit meinem eigenen Programm zu erfassen. Zusätzlich habe ich in meinem Sammelsorium noch ein 1.8 SPI TFT 128*160 gefunden. (incl SD Kartenaufnahme auf der Rückseite). Ich überlege grade parallel eure fortschritte damit zu verfolgen. Macht das Sinn? (Bislang habe ich das aber noch nicht in Betrieb genommen) Weiterhin habe ich leider etwas die Übersicht verloren, wer jetzt hier was versucht. Ich versuche einmal zusammen zu fassen. Bitte korrigiert mich wenn ich falsch liege. Dieter: Atmega328P (Arduino Nano) (Atmel Studio) - OV7670 (ohne Fifo) versucht das Bild direkt auf einem Display darzustellen. Michael: Arduino Nano (Arduino IDE) - OV7670 (mit Fifo) versucht das Bild an den PC zu senden?! und es mit einem COM Terminal aufzufangen und abzuspeichern? Igel: Durch und durch ARM :D - OV7670 (mit Fifo) Habe aber bei dir noch nen Nano auf dem Board stecken gesehen was treibst du genau mit dem?
Hallo, David D. schrieb: > Ich überlege, ob ich mir auch mal so ein Zeugs aus dem Internet drauf > schmeißen soll, um meine Kamera zu testen, obwohl ich mir vorgenommen > hatte, alles selbst in Gang zu bringen, um wirklich jedes Detail zu > verstehen und zu lernen. Das habe ich ganz ganz fürher noch gemacht, als zu den ICs noch die Innenschaltungen veröffentlicht wurde. Ja komplexer die ICs wurde, um so mehr habe ich mich auf meine konkrete Anwendung konzentriert. Datenblätter lesen hab ich aber damals ganz gut gelernt, auch, daß Fußnoten und Anmerkungen oft wichtiger sind als die Registerbeschreibung selbst... David D. schrieb: > nur auf Arduino Uno Hardware (was aber im Prinzip das gleiche ist, nur > mit weniger Pins nach außen geführt) aber ist beides der Atmega328 Ob UNO oder Nanao war bei mir ketzt nur eine Größenfrage, die sind funktionell in diesem Zusammenhang identisch. Atmel Studio ist mir für meine Spielereien in zu großer Klotz, ein AVR Studio 4 wäre durchaus hier noch griffbereit. Die Sachen auch von Dir sind aber in 10 Minuten in der ArduinoIDE und compilieren dort, also bleibe ich dabei. Gerade mal den Spaß gemacht den .ino Inhalt in ein AVR Studio 4 Projekt zu packen, hat keine 5 Minuten gedaurt, compiliert. Keine Lust, jetzt einen ISP-Programmer zu holen und es zu flashen... Zu TWI: schau in die verlinkten Arduino-Sketche, ist ohnehin reines C. Danke noch für den Link zum Applicatio-pdf, hatte ich noch nicht (und auch nicht gesucht...). Ich werde mir morgen mal einen Lochrasterträger mit Buchsenleisten und Verdrahtung fertig machen, für den Nano und beide OV7670 Versionen und vorverdrahten. Dann fällt nichts gleich auseinander. Werde wohl dann auch mal meinen LA ranhängen und mir mal anschauen, wo ein Grund für die zyklische auftretenden fehlerhaften Bilder zu erkennne ist. Gruß aus Berlin Michael
David D. schrieb: > EDIT: > Da flattert mir doch was ganz spannendes in die Hände (bzw. auf den > Bildschirm) > > https://github.com/dalmirdasilva/ArduinoCamera/blob/master/CameraAL422B/datasheet/OV7670%20Implementation%20Guide%20(V1.0).pdf Und Michael U. schrieb daraufhin: > Zu TWI: schau in die verlinkten Arduino-Sketche, ist ohnehin reines C. > Danke noch für den Link zum Applicatio-pdf, hatte ich noch nicht (und > auch nicht gesucht...). Hättet Ihr mal schön brav die Postings vom lieben Igel1 gelesen, hättet Ihr den Guide schon vor Wochen kennengelernt: Beitrag "Re: Brauche Unterstützung beim OV7670 (bzw. SCCB)" Anyway ... Ihr seid ja ganz schön am Stricken - Respekt, Respekt. > Ich überlege, ob ich mir auch mal so ein Zeugs aus dem Internet drauf > schmeißen soll, um meine Kamera zu testen, obwohl ich mir vorgenommen > hatte, alles selbst in Gang zu bringen, um wirklich jedes Detail zu > verstehen und zu lernen. Mach das auf keinen Fall! Abkupfern ist extrem motivationskillend und dazu bewundere ich Deine Ausdauer und Deine steile Lernkurve. Wenn Du Fertig-Code kopierst, hast Du einen Fan weniger ... Außerdem kannst Du unendlich stolz auf Dich sein, wenn Du das tatsächlich alles allein hinkriegst! Und willst Du Dir diesen Stolz selber stehlen? Viele Grüße Igel1
Au weia - noch so'n Schnitzer (ich hoffe, diesmal nur im Datenblatt): Schaut Euch mal das Bild "AL422-06 Write Cycle Timing (Write Enable)" auf S.11 der AL422B-Spec an: Lt. diesem Bild wird das Byte n+2 auf dem Bild erst in der 2. steigenden Taktflanke von WCK nach einer fallenden /WE-Flanke abgespeichert. Unser Problem: das "Horizontal Timing" der OV7670 Kamera besagt, dass nach einem Ansteigen von HREF bereits die erste Taktflanke von PCLK das erste Pixel-Byte überträgt. Das würde bedeuten: da HREF direkt per NAND-Gatter mit dem /WE vom AL422B gekoppelt ist, würde das erste Pixel-Byte einer jeden Zeile nicht in das FiFo geschrieben werden - tolle Wurst! Aber tröstet Euch: als Ausgleich wird am Zeilenende noch ein völlig falsches Byte in den Speicher geschrieben, wenn HREF längst schon wieder LOW ist. Seht Ihr das ähnlich, oder liege ich falsch? Viele Grüße Igel1
>>Mach das auf keinen Fall! Abkupfern ist extrem motivationskillend okay.... überredet ;-) was das Datenblatt angeht kann ich dir nicht ganz folgen. Also zunächsteinmal ist es bei mir Seite 12 (wir sprechen aber schon von v1.5?) Wo nimmst du das NAND Gitter her? Aber abgesehen davon verstehe ich das Timing diagram auch nicht wirklich... laut dem wird nämlich auch das n+1 Byte in DI geladen obwohl /WE auf high ist.... merkwürdig >>Hättet Ihr mal schön brav die Postings vom lieben Igel1 gelesen, hättet >>Ihr den Guide schon vor Wochen kennengelernt: Okay... sorry das ist mir wirklich durchgegangen... zu meiner Verteidigung lief da noch nicht mal das SCCB-Protokoll xD ... und es ist fast ein Jahr her... Aber danke nochmal für den Hinweis. Jetzt hab ich sie mir abgespeichert :D
Angehängte Dateien:
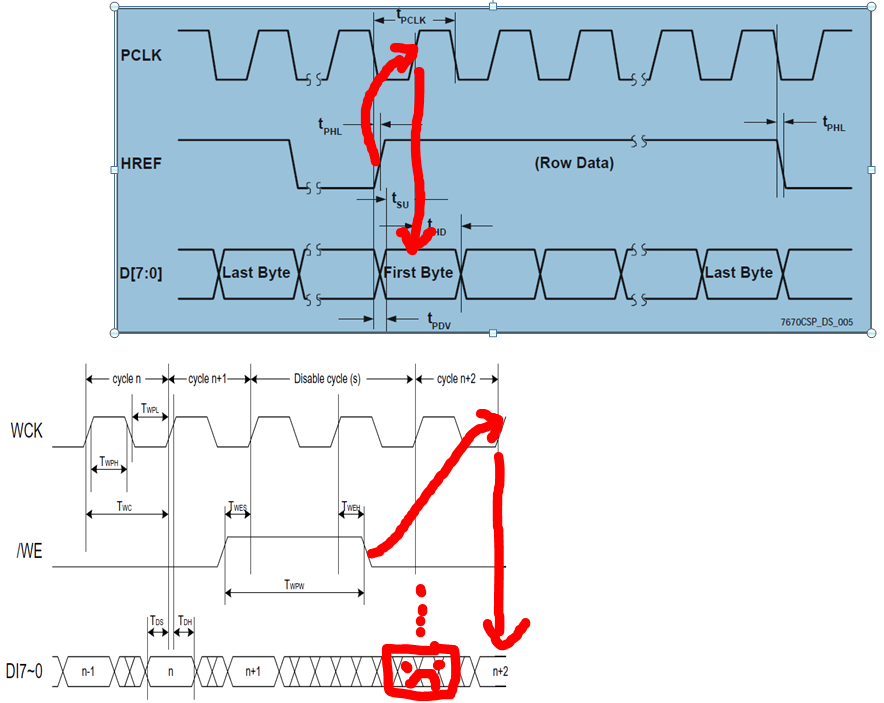
David D. schrieb: >>>Mach das auf keinen Fall! Abkupfern ist extrem motivationskillend > > okay.... überredet ;-) Tapfer! > was das Datenblatt angeht kann ich dir nicht ganz folgen. Also > zunächsteinmal ist es bei mir Seite 12 (wir sprechen aber schon von > v1.5?) Ja, hast recht - hatte versehentlich in meiner älteren Version nachgeschaut - das Timing ist aber in Version 1.5 unverändert problematisch. > Wo nimmst du das NAND Gitter her? Wie weiter oben geschrieben: > Ich vermute daher eher, dass ich dieses Modul hier habe: > http://www.haoyuelectronics.com/Attachment/OV7670-Module-A/CMOS_FIFO%20schematic.pdf Dort findest Du einen Baustein SN74LVC1G00: http://www.ti.com/lit/ds/symlink/sn74lvc1g00.pdf ... und das ist ein NAND-Gatter. Das Gatter invertiert das HREF-Signal (wenn FIFO_WR = HIGH) und so werden nur dann Pixel in das AL422B hineingeschrieben, wenn HREF = HIGH, weil dann nämlich \WE=LOW ist. Damit wird sichergestellt, dass nur die Zeilen-Pixel in den FiFo geschrieben werden (... wenn da nicht der in meinem letzten Post beschriebene Fehler wäre ...). > Aber abgesehen davon verstehe ich das Timingdiagram auch nicht > wirklich... laut dem wird nämlich auch das n+1 Byte in DI geladen obwohl > /WE auf high ist.... Das könnte sich so erklären: evtl. ist das "Write Register" (siehe interner Aufbau des AL422B) ein flankengetriggertes Flip-Flop, welches die Daten bei steigender Flanke übernimmt. Danach werden sie im nächsten Schritt ins DRAM geschrieben. Einmal im Flip-Flop geht die Sache ihren sozialistischen Gang. Trotzdem passt das alles nicht so recht ins Bild. > merkwürdig Richtig. Einzige Erklärung,die uns retten könnte: Das Diagramm "AL422-06 Write Cycle Timing (Write Enable)" ist falsch und es ist darin in der untersten Zeile DI7~0 nicht das Datenbyte, was außen am FiFo anliegt abgebildet, sondern dasjenige, welches intern ins DRAM geschrieben wird. Aber vielleicht haben Michael oder Dieter noch eine bessere Idee ... Im Anhang nochmals zum besseren Vergleich die zwei Timing im Vergleich. Der Frowny zeigt auf, wo eigentlich das erste Datenbyte nach einem Write Enable vom AL422B geschnappt werden müsste. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > Unser Problem: das "Horizontal Timing" der OV7670 Kamera besagt, dass > nach einem Ansteigen von HREF bereits die erste Taktflanke von PCLK das > erste Pixel-Byte überträgt. ich habe jetzt nicht in das Datenblatt des AL422B geschaut und auch die Schaltung nicht genauer angeschaut. Wie wird die OV7670 für den FiFo-Betrieb initialisiert? Wenn z.B. Bit 5 in COM10 gesetzt ist wird kein PCLK während des HSYNC ausgegeben. Ich komme erst heute nachmittag dazu, da mal reinzuschauen. PS: doch kurz reingechaut: AL422 übernimmt mit der steigenden Flanke von WCK die Daten wenn /WE aktiv ist. Die Kamera hat das Byte mit der steigenden Flanke von PCLK gültig, die kommt nach Ende HREF. Sieht für mich im Moment glaubwürdig aus? Gruß aus Berlin Michael
Michael U. schrieb: > Wie wird die OV7670 für den FiFo-Betrieb initialisiert? > Wenn z.B. Bit 5 in COM10 gesetzt ist wird kein PCLK während des HSYNC > ausgegeben. Das ist meiner Meinung nach unbedingt zu vermeiden: Die Clocks sollten auf beiden Seiten durchlaufen, vgl. Datenblatt Absatz 8.3.1. "It is recommended that the WCK and RCK are kept running at least 1MHz at all times." Und wenn wir schon den RCK-Takt brutal unter 1MHz runterdrücken, um das Bild in Ruhe auslesen zu können, dann sollte der WCK-Takt zumindest auf >1MHz durchlaufen, denn angeblich wird ja (lt. Datenblatt) der schnellere der beiden Takte zum DRAM-refresh verwendet (... glauben wir das mal ...), siehe Kapitel 8.3.1.: "The faster one of WCK and RCK is used as the DRAM refresh timing clock and has to be kept free running." > Ich komme erst heute nachmittag dazu, da mal reinzuschauen. Du bist entschuldigt :-) > PS: doch kurz reingechaut: AL422 übernimmt mit der steigenden Flanke von > WCK die Daten wenn /WE aktiv ist. Ja schon, aber laut dem Bild in meinem letzten Posting übernimmt der AL422B nach einem /WE=LOW (also nach einem Aktivieren der Schreibfähigkeit) erst mit der 2. steigenden Flanke wieder Daten vom Bus! Das ist genau der Knackpunkt. Schaut Euch mein Bild aus dem letzten Posting bitte einmal genau an. > Die Kamera hat das Byte mit der > steigenden Flanke von PCLK gültig, die kommt nach Ende HREF. Richtig - die Kamera wirft somit das 1. Byte raus, bevor der AL422B es aufschnappen kann, denn der liest seinerseits die Daten erst ab er 2. steigenden Flanke ein. > Sieht für > mich im Moment glaubwürdig aus? ... für mich nicht - aber ich lasse mich gerne von Euch vom Gegenteil überzeugen ... Ich kann nur hoffen, das das Datenblatt in diesem Punkt falsch ist, denn für diese Einlese-Verzögerung um einen WCK-Takt findet sich meiner Ansicht nach keine echte Begründung, die sich aus internen Aufbau des Chips ableiten ließe (vgl. "AL422-03 Block Diagram" auf S. 14 des Datenblatts). Viele Grüße Igel1
Hi Leute, so, hier der erste Versuch ein komplettes Bild in den AL422B zu schieben. Wenn Ihr Lust habt, so wäre es super nett, wenn Ihr einmal meinen Pseudo-Code sichten und ggf. kommentieren könntet:
1 | Reading an image frame from OV7670 into AL422B fifo: |
2 | ----------------------------------------------------- |
3 | |
4 | FIFO_WCK = >=1MHz clock // make sure AL422B FiFo is clocked by camera's PCLK with at least 1MHz |
5 | |
6 | delay(1ms) // see AL422 datasheet: do wait 0.1ms after power up before applying reset |
7 | |
8 | FIFO_WR = HIGH // enable chips WE (and keep it enabled all time till end of frame-grabbing |
9 | FIFO_WRST = HIGH // disable write reset |
10 | // at this point, pixels already get shifted into AL422B, but we don't care for it |
11 | // because we will reset the FiFo's write address pointer later on. |
12 | |
13 | while(!VSYNC) {} // VSYNC=LOW: wait for end of current frame
|
14 | while(VSYNC) {} // VSYNC=HIGH: vsync=high marks end of old frame
|
15 | |
16 | // new frame starts here |
17 | FIFO_WRST = LOW // reset AL422B write addr pointer by driving /WRST to LOW for >= 2 cycles (1 cycle = 1 PCLK-cycle) |
18 | delay(1ms) // and < 17x Tline => driving /WRST to LOW for 1ms should be okay |
19 | FIFO_WRST = HIGH // reset write address pointer of AL422B |
20 | |
21 | while(!VSYNC){} // read data while VSYNC=LOW
|
22 | |
23 | // new frame ends here |
24 | FIFO_WR = LOW // disable chips WE when end of frame is reached (VSYNC goes HIGH) |
25 | // and keep it disabled since we are done with reading one frame. |
Das Schöne am Ganzen: es ist wirklich keine echt zeitkritische Aktion enthalten - das ATmega sollte das also genauso locker bewerkstelligen können. Viele Grüße Igel1
... und weil's so schön war, hier direkt der Pseudo-Code für das Auslesen des AL422B FiFo:
1 | Reading an image frame out of AL422B fifo: |
2 | ------------------------------------------- |
3 | |
4 | FIFO_RCK = 10kHz clock // feed FiFo with clock signal (using TIM1 on STM32F4) |
5 | // frequency can be adjusted according to UART-baudrate (e.g. 115200 baud) |
6 | // and UART-mode (e.g. 8N1 => 1 Start-Bit + 8 Data-Bits + 1 Stop-Bit = 10 Bits) |
7 | // If you use 115200 baud, you can transfer 115200baud/10bit/Byte = 11520 Bytes/s |
8 | // So FIFO_RCK can be at most 11.520 KHz in this example |
9 | // See: http://www.netzmafia.de/skripten/hardware/PC-Schnittstellen/seriell.html |
10 | |
11 | delay(1ms) // see AL422 datasheet: do wait 0.1ms after power up before applying reset |
12 | |
13 | FIFO_RRST = LOW // reset AL422B read addr pointer by driving /RRST to LOW |
14 | delay(1ms) |
15 | |
16 | // pull /RRST high right after a falling RCK shoulder |
17 | while(!FIFO_RCK){} // wait for a possible high shoulder to end
|
18 | while(FIFO_RCK){} // wait for FIFO_RCK to become low
|
19 | FIFO_RRST = HIGH // read addr pointer starts upcounting here (at very rising FIFO_RCK-edge) |
20 | |
21 | // read out image from AL422B FiFo |
22 | for(noOfPixels x bytes per pixel){ // repeat for "number of bytes in an image frame" times
|
23 | while(!FIFO_RCK) // wait during low FIFO_RCK-shoulder |
24 | get FIFO_DATA // grab data right after rising edge of FIFO_RCK |
25 | UARTsend(FIFO_DATA) // send data |
26 | while(FIFO_RCK) // wait till end of high shoulder of FIFO_RCK |
27 | } |
Auch hier würde ich mich sehr freuen, wenn Ihr einen intensiven Blick darauf werfen könntet und mir Feedback gebt. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > Auch hier würde ich mich sehr freuen, wenn Ihr einen intensiven Blick > darauf werfen könntet und mir Feedback gebt. werde ich sicher machen, aber erst irgendwann nachher. Ich löte erstmal meinen Lochrasterträger mit Buchsenleisten zusammen, dann kann ich stabil zwischen mit und ohne FiFo wechseln und im Zweifel auch einfach mal was messen ohne daß der Drahtverhau auseinanderfällt. Dann kann ich Deinen Ansatz auch einfach mal in den obigen Source reintippen, OV7670 Init ist dann dort übersichtlich genug und der TWI- und UART-Kram ist ja auch lauffähig vrohanden. Gruß aus Berlin Michael
Hi, ich bin der Leserei jetzt überdrüssig und habe mich entschieden: Ich werde erstmal mit QQVGA beginnen. Da kann ich mit 2 MBaud (getestet und für gut befunden) im Idealfall (errechnet) 3 - 4 FPS erzielen und brauche nicht mal Interleave. Arbeite gerade an einem kleinen Python-Script. Mal schauen, wie schnell PIL's Routinen zum Pixel setzen sind :-) Übrigens werde ich mit 16 MHz Takt für die Kamera arbeiten. Spielt sowieso keine Rolle - warum sollte ich dann außerhalb der Spezifikation bleiben ... . So aktiviere ich PINB0 per Fuse und fertig. VG Dieter
Hi Leute, habe den Pseudocode inzwischen in "echten" Code verwandelt. Gerade zum ersten Mal das Programm laufen lassen. War leider ein Schuss in den Ofen: zeigt nur weisse Mäuse vor weissem Hintergrund an. Jetzt wird's interessant, denn debuggen mit einem Logicanalyzer ohne Zugriff auf die Pins der Kamera (es sind ja nur HREF und VSYNC nach draussen geführt) wird vermutlich schwierig werden. Das wird sicherlich langwierig werden (es sei denn, Ihr findet direkt vorab einen dicken Bock im Pseudocode). Viele Grüße Andreas
Guten Morgen/Mahlzeit zusammen. @Igel ich werde mir deine beiden Pseudocodes nachher, wenn ich zuhause bin einmal anschauen und mit meinem bisherigen vorgehen vergleichen. Bis nachher :)
Hallo, Andreas S. schrieb: > War leider ein Schuss in den Ofen: zeigt nur weisse Mäuse vor weissem > Hintergrund an. naja, besser als garkein Bild... ;) Ich bin mit meinem Träger löten gestern auch nicht allzuweit gekommen, hoffentlich wird es nachher nochwas. Puh... Hatte ich noch garnicht nachgeschaut, aber die Eingäge des AL422B sind ja zum Glück 5V-tolerant... Gruß aus Berlin Michael
Sooo... meine bessere hälfte hatte doch noch was zu tun, wodurch ich wenigstens die Möglichkeit hatte die Write Sequenz schon einmal durchzuschauen: >FIFO_WCK = >=1MHz clock // make sure AL422B FiFo is clocked by camera's >PCLK with at least 1MHz So far so good... Wenn ich bei mir messe, liegen ungefähr die 12 Mhz vom verbauen Oszillator an. >delay(1ms) // see AL422 datasheet: do wait 0.1ms after power >up before applying reset jep... aber jetzt steht dort: "Apply /WRST and /RRST 0.1ms after power on" Für mich hieß apply bei einem low-active signal auf Low ziehen. Bin ich hier falsch? also ich habe an dieser Stelle dann
1 | //Initialization From Datasheet: "Apply/WRST and //RRST 0.1ms after power on
|
2 | OV_WRST_PORT &= ~(1<<OV_WRST_PinNo); |
3 | OV_RRST_PORT &= ~(1<<OV_RRST_PinNo); |
womit ich beide Pins auf Low Signal ziehe. bei mir pulse ich danach nohc zweimal den RCK Pin um den Read Pointer wirklich auf 0 zurückzuholen. Keine Ahnung ob das notwendig ist... Na gut, weiter im Text: >FIFO_WR = HIGH // enable chips WE (and keep it enabled all time >till end of frame-grabbing >FIFO_WRST = HIGH // disable write reset > // at this point, pixels already get shifted into >AL422B, but we don't care for it > // because we will reset the FiFo's write address >pointer later on. Ist WE nicht ebenfalls Low-active? also eigentlich /WE demnach würdest du es deaktivieren und dann wird garnichts geschrieben. >while(!VSYNC) {} // VSYNC=LOW: wait for end of current frame >while(VSYNC) {} // VSYNC=HIGH: vsync=high marks end of old frame while(VSYNC) {}... sehr gut... das hatte ich bis jetzt noch nicht, macht aber durchaus Sinn >// new frame starts here >FIFO_WRST = LOW // reset AL422B write addr pointer by >driving /WRST to LOW for >= 2 cycles (1 cycle = 1 PCLK-cycle) >delay(1ms) // and < 17x Tline => driving /WRST to LOW for >1ms should be okay was meinst du genau mit diesem Kommentar?: < 17x Tline => Ich habe da nur ein delay von 6 us drin... frage mich grade wie ich dadrauf gekommen bin >FIFO_WRST = HIGH // reset write address pointer of AL422B > >while(!VSYNC){} // read data while VSYNC=LOW > >// new frame ends here >FIFO_WR = LOW // disable chips WE when end of frame is reached (VSYNC goes HIGH) > // and keep it disabled since we are done with >reading one frame. FIFO_WR = LOW --> siehe oben, ich meine Low-active Die Read Sequenz dann später :) @Michael, wie willst du es schaffen, dass beide Kameras mit dem Board kompatibel sind? ich habe auch beide Versionen hier, aber die Pins weichen eben schon voneinander ab in den beiden Modellen? Oder willst du das aufwändig über jumper lösen? Bis später, David EDIT: irgendwie hats die Zitate verhauen und ich bekomme es auch nicht korriegiert... Ich hoffe ihr könnt es dennnoch inhaltlich trennen ;-)
Hallo, David D. schrieb: > @Michael, wie willst du es schaffen, dass beide Kameras mit dem Board > kompatibel sind? ich habe auch beide Versionen hier, aber die Pins > weichen eben schon voneinander ab in den beiden Modellen? Oder willst du > das aufwändig über jumper lösen? Ich habe 2 passende Buchsenleisten parallel verlötet, es wird natürlich nur jeweils eine Kamara gesteckt werden. Die "identischen" Pins verbinde ich direkt, SDA/SCl/XCLK über Levelshifter, D0...D7 kommen auch zusammen, ist ja egal, ob die Daten vom OV7670 oder dem AL422B kommen. PCLK und XCLK kommen parallel auf 2 Pins des AL422B, dann bleiben von dem noch 4 Signale, die ich auf freie Pins verteilen muß. Prinzipiell sind ja D9...D13 (PB1...PB5) noch verfügbar, außer der Kamera kommt an des "Spielbrett" nicht ran, bei OB7670 ohne FiFo und OV2640 wäre dann selbst SPI ja noch verfügbar. Der Rest ist ja dann Sache der Definitionen in der jeweiligen Software. Prinzipiell würde auch mein OV2640 Modul noch auch dem Platz der OV7670 passen, die PinOuts sind identisch. Dann kann ich zumindest die Hardware mal in die Ecke legen, wenn ich keine Zeit dafür habe, ohne das was auseinanderfällt... Gruß aus Berlin Michael
David D. schrieb: > Sooo... meine bessere hälfte hatte doch noch was zu tun, wodurch ich > wenigstens die Möglichkeit hatte die Write Sequenz schon einmal > durchzuschauen: Dankeschön - sehr nett von Dir. >FIFO_WCK = >=1MHz clock // make sure AL422B FiFo is clocked by camera's >PCLK > with at least 1MHz > So far so good... Wenn ich bei mir messe, liegen ungefähr die 12 Mhz vom > verbauen Oszillator an. Dann passt ja alles. > >>delay(1ms) // see AL422 datasheet: do wait 0.1ms after power >up > before applying reset > jep... aber jetzt steht dort: "Apply /WRST and /RRST 0.1ms after power > on" Für mich hieß apply bei einem low-active signal auf Low ziehen. > Bin ich hier falsch? JA. Ich glaube, Du hast da einen Denkfehler gemacht: Schau Dir das Nand Gatter im Schaltplan genau an: Damit wird \WE nur dann auf LOW gezogen, wenn FiFo_WR = HIGH AND HREF = HIGH ist. > also ich habe an dieser Stelle dann >
1 | //Initialization From Datasheet: "Apply/WRST and //RRST 0.1ms after
|
2 | > power on |
3 | > OV_WRST_PORT &= ~(1<<OV_WRST_PinNo); |
4 | > OV_RRST_PORT &= ~(1<<OV_RRST_PinNo); |
> womit ich beide Pins auf Low Signal ziehe. Okay - da könnte etwas dran sein. Muss ich mir nochmals überlegen, ob ich das genauso machen werde. > > bei mir pulse ich danach nohc zweimal den RCK Pin um den Read Pointer > wirklich auf 0 zurückzuholen. Keine Ahnung ob das notwendig ist... Na > gut, weiter im Text: > > > >>FIFO_WR = HIGH // enable chips WE (and keep it enabled all time >till > end of frame-grabbing >>FIFO_WRST = HIGH // disable write reset >> // at this point, pixels already get shifted into >AL422B, > but we don't care for it >> // because we will reset the FiFo's write address >>pointer later on. > Ist WE nicht ebenfalls Low-active? also eigentlich /WE demnach würdest > du es deaktivieren und dann wird garnichts geschrieben. Siehe Anmerkungen von mir weiter oben. > > >>while(!VSYNC) {} // VSYNC=LOW: wait for end of current frame >>while(VSYNC) {} // VSYNC=HIGH: vsync=high marks end of old frame > while(VSYNC) {}... sehr gut... das hatte ich bis jetzt noch nicht, macht > aber durchaus Sinn > >>// new frame starts here >>FIFO_WRST = LOW // reset AL422B write addr pointer by >driving /WRST to > LOW for >= 2 cycles (1 cycle = 1 PCLK-cycle) >>delay(1ms) // and < 17x Tline => driving /WRST to LOW for >1ms > should be okay > was meinst du genau mit diesem Kommentar?: < 17x Tline => Der Write Reset muss unbedingt disabled werden, bevor HREF auf HIGH geht, also bevor die Zeilenübertragung beginnt. > Ich habe da nur ein delay von 6 us drin... frage mich grade wie ich > dadrauf gekommen bin > >>FIFO_WRST = HIGH // reset write address pointer of AL422B >> >>while(!VSYNC){} // read data while VSYNC=LOW >> >>// new frame ends here >>FIFO_WR = LOW // disable chips WE when end of frame is reached (VSYNC > goes HIGH) >> // and keep it disabled since we are done with >reading > one frame. > FIFO_WR = LOW --> siehe oben, ich meine Low-active > > Die Read Sequenz dann später :) > Danke! > > @Michael, wie willst du es schaffen, dass beide Kameras mit dem Board > kompatibel sind? ich habe auch beide Versionen hier, aber die Pins > weichen eben schon voneinander ab in den beiden Modellen? Oder willst du > das aufwändig über jumper lösen? > > Bis später, > David > > EDIT: irgendwie hats die Zitate verhauen und ich bekomme es auch nicht > korriegiert... Ich hoffe ihr könnt es dennnoch inhaltlich trennen ;-) Macht nix. Viele Grüße Igel1
Lieber Igel.... ich bitte vielmals um Verzeiung :D ... Ich sollte mir wohl definitiv mehr Zeit für eure Beiträge nehmen. Das fällt mir nur immer sehr schwer, weil ich voller Tatendrang stecke und meine Zeit sooo begrenzt ist... Aber damit kämpfen wir ja alle... Da du so hartnäckig an deinem NAND Gatter festgehalten hast und ich es zugegebener maßen bis grade immer noch nicht verstanden hatte, habe ich jetzt zwei Stunden investiert, um zum ersten meine Verkabelung zu überprüfen (seit der nächtlichen Umbauaktion geht leider garnix mehr :D) und mich mit meinem Modul auseinander zu setzen. Ich habe beide Schematics die ich zum Modul hatte überprüft und bin zu dem Entschluss gekommen, dass die beide nicht zu meinem Modul gehören. Dann habe ich brav in diesem Chatverlauf nach deiner verlinkten schematics gesucht und zack... ja passt auch für mich, wie die Faust aufs Auge. Aber wo ist die LED?! ... jap einfach nicht aufgelötet. aber Die Pads sind da. nach der Schematics scheint es wohl einfach eine unregelbare beleuchtungs LED und keine Status LED zu sein. Durch das NAND-Gatter wird mir jetzt auch klar, warum auf dem Board WR und nicht WE steht. Wir halten also Fest: /WE bleibt weiterhin Low-Active wie im Datenblatt angegeben. Dazu ergibt sich folgende Logische Beziehung: WE = ~(WR^HREF) --> ~WE = /WE = (WR^HREF) Damit muss ich mir schonmal keine Gedanken machen, dass während des HREF plötzlich was unerwartes in den Fifo geschrieben wird. Das war aufjedenfall eine sehr Wertvolle Lehrstunde für mich und ich werde meinen Code nochmal dementsprechend überarbeiten. Gruß David. PS: Read Sequenz schaue ich mir dann jetzt gleich mal an
Hallo, David D. schrieb: > Aber wo ist die LED?! ... jap einfach nicht aufgelötet. aber > Die Pads sind da. nach der Schematics scheint es wohl einfach eine > unregelbare beleuchtungs LED und keine Status LED zu sein. LED ist bei mir auch nicht bestückt, mit 1k Vorwiderstand laut Schaltplan wohl offenbar nur als Spannungsanzeige gedacht gewesen. Gruß aus Berlin Michael
David D. schrieb: > Damit muss ich mir schonmal keine Gedanken machen, dass während des HREF > plötzlich was unerwartes in den Fifo geschrieben wird Das hast Du messerscharf erkannt! Ich finde überhaupt, dass Du Dich sehr konsequent und zielgerichtet einliest und alles recht fix kapierst. Du brauchst Dein Licht nur nicht so unter den Scheffel zu stellen. Bescheidenheit ist eine Zier, doch es besser lebt man ohne ihr. Habe ich das weiter oben richtig verstanden, dass so ein heller Kopf wie Du sich keinen LogicAnalyzer für 100 Mäuse leisten kann? Wenn das stimmt, so denke nochmals über Deinen aktuellen Arbeitgeber nach. Anders ist die Situation natürlich, wenn Du und Dein Liebste gerade Drillinge bekommen oder ein Haus gebaut habt ... Viele Grüße Igel1
Angehängte Dateien:
-

Bild1.jpg
8,7 KB -

DS1Z_QuickPrint18.png
91 KB -

DS1Z_QuickPrint19.png
54 KB
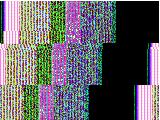


Hi, damit ihr mal ein wenig Lachen könnt :-) Immerhin bekomme ich meine Daten nach Python übertragen. Es soll eine Color-Bar sein (Register 0x12 Wert 0x06) :-). Mit viel Phantasie erkennt man das sogar ... Python kommt offensichtlich nicht mit und "ruckelt Verschieber" rein. Die Daten kommen sauber an (mit HTERM geprüft) - nur die Python-Eingangsverarbeitung hakelt scheinbar etwas. Meine Register-Einstellungen:
1 | //Reset Register
|
2 | write_register_i2c(0x12, 0x80); |
3 | _delay_ms(100); |
4 | |
5 | //Pixel-Clock = Input-Clock/2 (!! + Register 0x3e und 0x73)
|
6 | write_register_i2c(0x11, 0x02); |
7 | |
8 | //Home - Steuerung Belichtung
|
9 | write_register_i2c(0x13, 0xe5); //AWB off |
10 | write_register_i2c(0x01, 0x96); |
11 | write_register_i2c(0x02, 0x40); |
12 | |
13 | //Saturation 0
|
14 | write_register_i2c(0x4f, 0x80); |
15 | write_register_i2c(0x50, 0x80); |
16 | write_register_i2c(0x51, 0x00); |
17 | write_register_i2c(0x52, 0x22); |
18 | write_register_i2c(0x53, 0x5e); |
19 | write_register_i2c(0x54, 0x80); |
20 | write_register_i2c(0x58, 0x9e); |
21 | |
22 | //Brightness 0
|
23 | write_register_i2c(0x55, 0x00); |
24 | |
25 | //QQVGA
|
26 | // write_register_i2c(0x12, 0x04); //"normale" Funktion RGB
|
27 | write_register_i2c(0x12, 0x06); //"normale" Funktion RGB - + Color Bar |
28 | write_register_i2c(0x0C, 0x04); //DCW enable |
29 | write_register_i2c(0x3E, 0x1A); //DCW and scaling PCLK / 4 |
30 | write_register_i2c(0x70, 0x3A); //Horizontaler Skalierungs-Faktor |
31 | write_register_i2c(0x71, 0x35); //Vertikaler Skalierungs-Faktor |
32 | write_register_i2c(0x72, 0x22); //DCW control parameter |
33 | write_register_i2c(0x73, 0xF2); //Clock divider für DSP / 4 |
34 | write_register_i2c(0xA2, 0x02); //Histogramm ... |
35 | write_register_i2c(0x56, 0x40); //Kontrast 0 |
Das Timing auf Kamera-Seite sieht (aus meiner Sicht) hingegen gut aus: Gelb -> VSYNC Violett -> HREF Blau -> TX (Ich sende den String "Start" bei jedem neuen Bild - daher der "blaue Ausreisser") QQVGA hat den Vorteil, dass nur jeder 4. HREF-Slot (im Vergleich zu VGA) Daten enthält/übermittelt. Die "Totzeit" nutze ich für die serielle Übertragung. VG Dieter
Angehängte Dateien:
-

Cam-Lochraster.jpg
150 KB
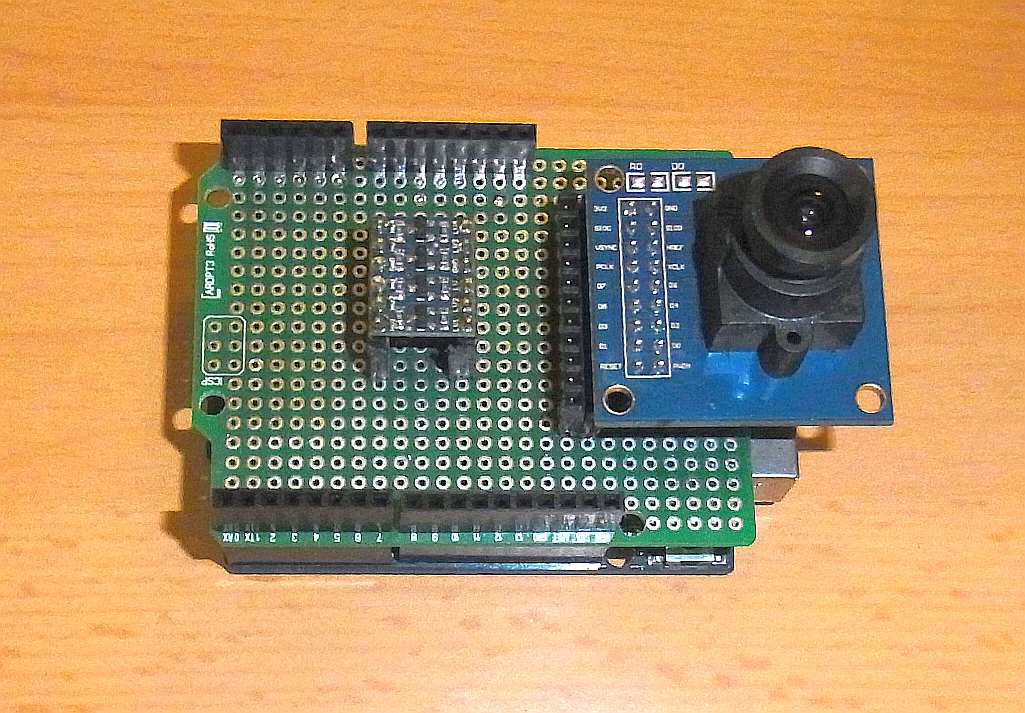
Hallo, ok, Löten habe ich noch geschafft, läuft auf dem Arduino UNO, aber nicht sinnvoll... Ein halbwegs fehlerfreies Bild bekomme ich nur manchmal. Morgen hänge ich mal den LA ran und schaue mir das erstmal an, ob erkennbar ist, wo es klemmt. Zumindest kann ich jetzt wahlweise auch mal mit der FiFo-Version rumspielen. Gruß aus Berlin Michael
Hi Leute, na das sieht bei Dieter doch schon ganz "interessant" aus. Und Michael hat sich ein Bienchen für sauberes Löten verdient! Ich selber debugge mich so durch die Gegend. Bislang gefunden: - Hatte vergessen die Ports-Initialisierungsfunktion aufzurufen. Ergo waren alle Steuerein- und Ausgänge hochohmig und es passierte gar nichts. - Sodann hatte ich vergessen FIFO_OE auf LOW zu setzen: folglich waren die Datenausgänge des AL422B ebenfalls hochohmig und nichts kam heraus. Ansteuerung und Timings sehen mir inzwischen ganz passabel aus. Inzwischen habe ich graue Mäuse auf grauem Hintergrund - supi ... Viele Grüße Igel1
Angehängte Dateien:
-

Cam-Lochraster2.jpg
150 KB
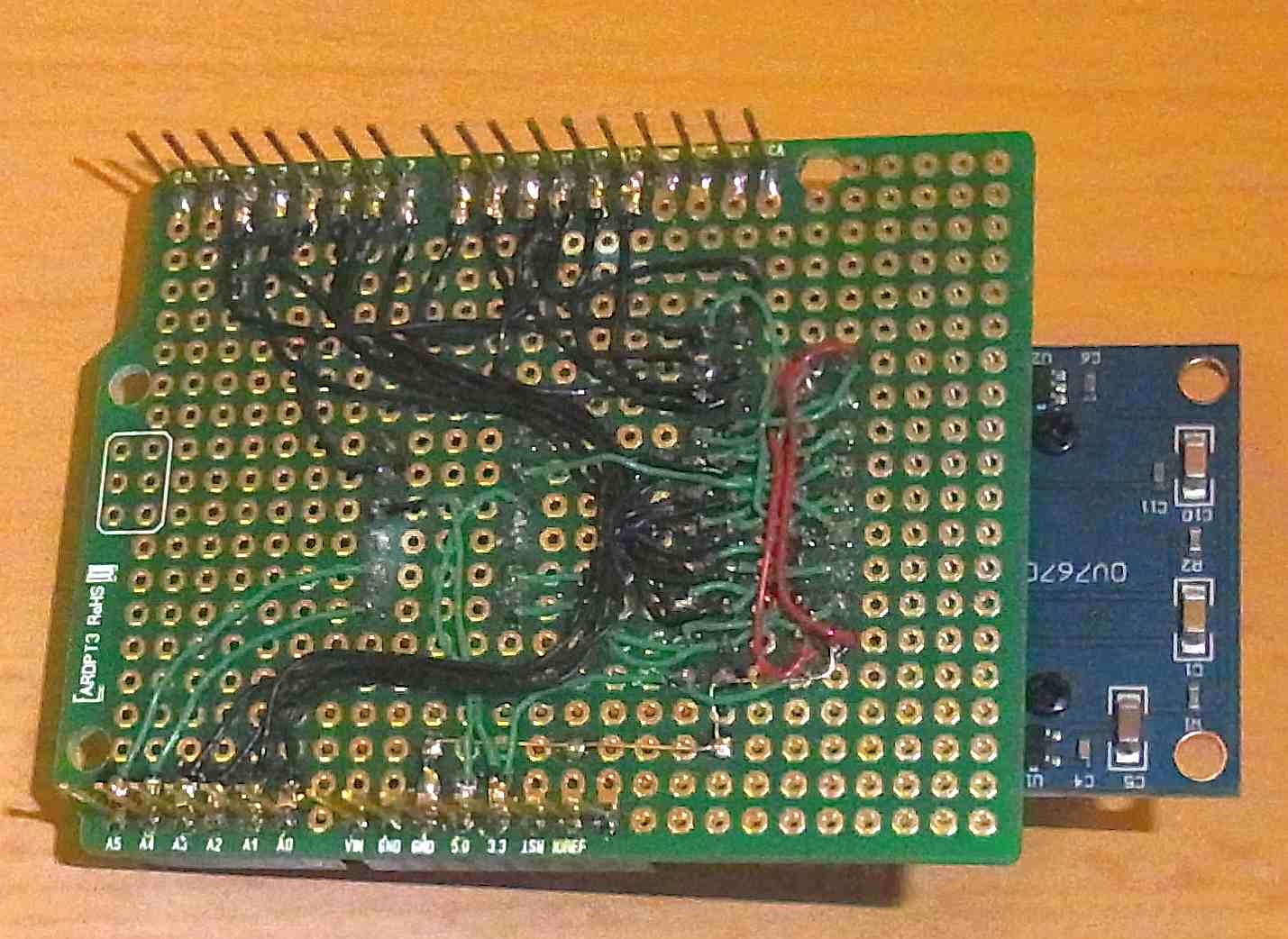
Hallo, Andreas S. schrieb: > Und Michael hat sich ein Bienchen für sauberes Löten verdient! naja, mal schauen, ob Du bei Deinem Bienchen bleibst... ;-) Gruß aus Berlin Michael
Michael U. schrieb: > naja, mal schauen, ob Du bei Deinem Bienchen bleibst... ;-) Okay - ersetze "Bienchen" bitte durch "dicken Brummer". Mama mia ... Viele Grüße Igel1
Angehängte Dateien:

Verflixte Hacke, wo liegt der Fehler? Bitte schaut Euch mal die Ansteuerung des Moduls für den Einlesezyklus an: Mit dieser Ansteuerung will ich ein Bild von der Kamera in den FiFo schieben. Seht Ihr irgendwelche Fehler? Viele Grüße Igel1
Aha - habe soeben einmal die Register mit einer Zahlen-Kombination aus dem Internet gefüllt. Es erscheinen erste, schemenhafte Bilder. Alles sehr bleich. Ist scheinbar noch ein längerer Weg bis zum ersten echten, scharfen Bild. Gute Nacht Igel1
Hey! Na das hört sich doch schonmal gut an! Hast du an deinen read weite Funktionen was ändern müssen? Bei mir bleibt es leider dabei, dass ich nicht mal zweimal das gleiche auslesen kann -,-
David D. schrieb: > Hey! Na das hört sich doch schonmal gut an! Hast du an deinen read > weite Funktionen was ändern müssen? Bei mir bleibt es leider dabei, dass > ich nicht mal zweimal das gleiche auslesen kann -,- Bitte in meinem Falle nicht den Tag vor dem Abend loben ... Es ist noch weit, weit entfernt davon, ein Bild zu ergeben. Aktuell kann ich nur sagen: es kommt irgendwas vorne rein, was scheinbar irgendetwas mit dem zu tun hat, was hinten rauskommt. Nicht mehr und nicht weniger. Was Dein Problem angeht, so sehe ich zwei mögliche/wahrscheinliche Ursachen: 1.) Du hältst das Schreiben des OV7670 in den FiFo nicht an. Will sagen: prüfe einmal, ob Du nach dem Schreiben (also nach dem Auslesen des Bildes) das Signal FIFO_WE auf LOW legst (und dort für die gesamte Zeit des späteren FIFO-Auslesens auch auf LOW belässt). Ein LogicAnalyzer ist in diesem Zs.hang Gold wert. 2.) Du machst evtl. keinen Address Pointer Reset, bevor Du den FiFo ausliest: Prüfe, ob Du wirklich vor jedem Auslesen FIFO_RRST auf LOW legst und sofort, nachdem Du FIFO_RRST auf HIGH ziehst mit der ersten steigenden RCK-Flanke Deine Daten ausliest. Mehr fällt mir aktuell auch nicht dazu ein. Viele Grüße Igel1
Angehängte Dateien:
-

Foto_04.02.19__19_37_26.jpg
230 KB -

Foto_04.02.19__19_38_13.jpg
240 KB
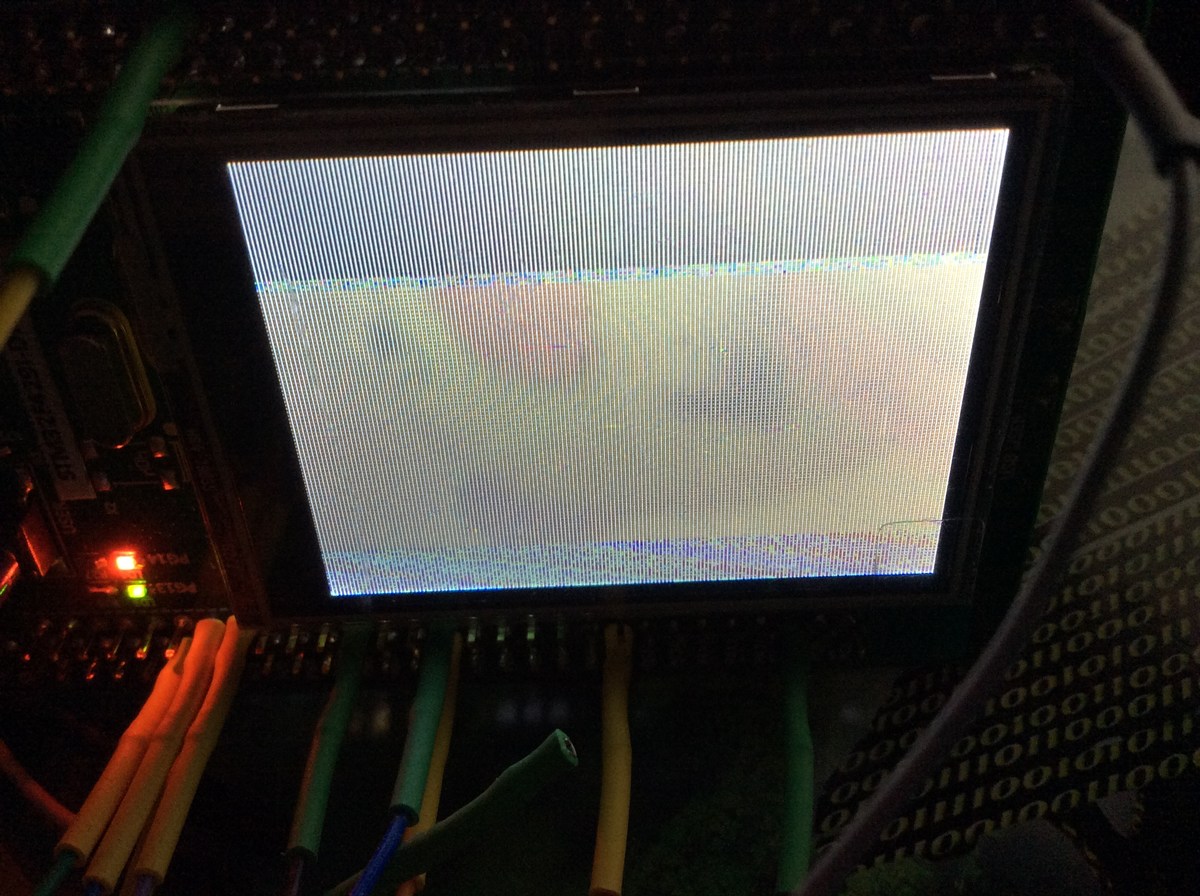
... man muss nur das richtige "Model" nehmen, schon erkennt man erste, zarte Erfolgspflänzchen ... 1. Photo: Original 2. Photo: ... na ratet mal ... Fazit: es muss noch weiter am Code gestrickt werden. Irgendetwas mit der Horizontal- und der Vertikalauflösung stimmt da noch nicht. Auch scheint mir das Bild noch furchtbar blass ... Schau'n wir mal ... Viele Grüße Igel1
Andreas S. schrieb: > Fazit: es muss noch weiter am Code gestrickt werden. Hi, nein - das ist meiner Meinung nach eine reine Parameter-Einstellung der Kamera. Ich bekomme auch herrlich bunte Bilder, welche mit viel Phantasie das abbilden, was ich sehe. Da kommen dann bekannte und "magic"-Parameter ins Spiel. An dieser Stelle klinke ich mich aus. Es bringt mir überhaupt nichts, wenn ich irgendwelche Register-Einstellungen (ohne den Hintergrund zu kennen) nachstelle. Ich kenne den "Implementation Guide" und den "Software Guide" zur Kamera - aber beides ist unzureichend. Da arbeite ich lieber mit Liniensensoren, bei denen ich ich die Umsetzung (Helligkeit etc.) selbst steuern muss. Ich habe mal mit dem Gedanken gespielt, die OV7670 als Sensor für eine Spektralanalyse einzusetzen - das habe ich hiermit verworfen (also ein erfolgreicher POC :-) ). Der ATMega328x ist schlicht nicht ausreichend, um mit diesem Kamera-Modul (egal ob mit oder ohne Fifo) umzugehen. Nur für ein Standbild ist der Fifo sinnvoll, da das Kamerabild dann für die weitere Verarbeitung (VGA etc.) zwischengespeichert wird. Aber wozu? Der ATMega328x ist schlicht unzureichend, um weitere Verarbeitung(en) durchzuführen. Auch ein ATXMega (trotz DMA) wird da überfordert sein. Es war nett, das mal auszuprobieren - aber es macht aus meiner Sicht keinen Sinn, weiter zu machen. Irgendwelche Einstellungen nachzumachen (oder zu kopieren) macht für mich keinen Sinn. Die Kamera / die Einstellungen sind so schlecht dokumentiert, dass ich da nicht weitermachen möchte. Viel Spass noch allen und viele Grüße Dieter
Hallo, Dieter F. schrieb: > Der ATMega328x ist schlicht nicht ausreichend, um mit diesem > Kamera-Modul (egal ob mit oder ohne Fifo) umzugehen. Nur für ein > Standbild ist der Fifo sinnvoll, da das Kamerabild dann für die weitere > Verarbeitung (VGA etc.) zwischengespeichert wird. Aber wozu? ein "wozu" gibt es bei der Geschichte für mich ohnehin nicht. Der Kamera-Sensor ist einer der ersten, die es für Handy-Kameras überhaupt gab. von dieser Seite sind also ohnehin keine Wunder zu erwarten. Ich hatte am Anfang schon mal erwaähnt, daß ich die DC3840 auch hier habe, die dürfte den gleichen Sensor drin haben. Die gehörte zu irgendeinem Siemens-Handy als Aufsteckkamera und wurde um 2007 für 1,-€ verramscht. https://www.ulrichradig.de/home/index.php/projekte/uC-kamera Unterschied ist, daß der benutzte IC OV528 einen JPEG-Encoder enthält und die Daten im Original mit 921kBaud seriell rausschickt. Sowas als Standbild kann man mit einem Mega328 mit der OV7670 bermitlich auch schaffen. Nicht mehr und nicht weniger... Ich hatte die DC3840 inzwischen mal erfolgreich an einen ESP8266 gehängt, der mir auf zum Webbrowser auch ein "Foto" in 640x480 schickt. Dauert, wie auch damals am Mega32 mit ENC28J60 als LAN-Interface, etliche Sekunden bis das Bild komplett da ist. Die OV7670 kommt am Mega328 da schlechter weg, weil sie ohne FiFo keinen Snapshot kann und mit FiFo die Pins nicht mehr reichen, um z.B. SPI noch nutzen zu können. Dieter F. schrieb: > Ich kenne den "Implementation Guide" > und den "Software Guide" zur Kamera - aber beides ist unzureichend. Kann ich bis jetzt noch nicht sagen, ich habe mir noch nicht die Zeit genommen, da genauer durchzuschauen. Letztlich sind aber wohl die Leute damals damit ja auch zurechtgekommen. Gruß aus Berlin Michael
Michael U. schrieb: > Letztlich sind aber wohl die Leute > damals damit ja auch zurechtgekommen. Dann schau mal weiter nach - ich bin gespannt.
@Dieter: Ja, ich bin inzwischen auch mächtig abgenervt von der Register-Setting-Lotterie. Es muss doch irgendwen geben der das optimale Setting herausgefunden hat ... Viele Grüße Igel1
Andreas S. schrieb: > Es muss doch irgendwen geben der das optimale Setting herausgefunden hat Moin, ja - dazu habe ich auch etwas gefunden. Der Hersteller gibt "Geschäftskunden" - nach "non disclosure agreement" - weiterführende Unterlagen ... Also bleibt nur, bestehende (funktionierende) Einstellungen "abzukupfern" oder langwierig zu experimentieren. Beides sind für mich keine Alternativen. VG Dieter
Hallo, Dieter F. schrieb: > Der Hersteller gibt "Geschäftskunden" - nach "non disclosure agreement" > - weiterführende Unterlagen ... > > Also bleibt nur, bestehende (funktionierende) Einstellungen > "abzukupfern" oder langwierig zu experimentieren. Beides sind für mich > keine Alternativen. werden diese Module heute wirklich noch irgendwo eingesetzt außer als NOS-Restposten für ein paar Hobbybastler? Ich kann es mir eigentlich nicht vorstellen. Die Daten passeg zu gut zu den damaligen ersten Webcams und da war man froh, wenn der Rechner 320x240 mit 10-15 Fps zustande gebracht hat. Wir haben damals private Videosession mit einem Bekannten in Kanada gemacht, mehre als 5-10 Fps kamen da ohnehin nie stabil zustande. Lichtempfindlichkeit war sowieso miserabel (für heutige Verhältnisse). Du hast doch, genau wie ich, schon ein Bild zu sehen bekommen. Die Grundsettings für YUV in 320x240 passten also grundsätzlich erstmal. Sie Einstellungen von Deinem Link und von meinen sind identisch, die kompletten Sourcen soweit auch. Ich kenne mit den OV7670 kaum was fertiges, auch für die OV2760 ist die Luft da dünn. Eine QR-Code-Auswertung und einen Roboter, der die Bilder mit wenigen Fps schickt, das war es eigentlich auch schon. Kamera am "Arduino" und die Preise sind meiner Meinung nach die Auslöser für den Hype auf die Dinger. Es werden wohl die meisten gekauften irgendwo in der Ecke liegen, weil am letztlich keine irgendwie sinnvolle Anwendung dafür gefunden hat. Ein RasPi Zero W mit der RasPi-Cam läßt die Dinger doch sowieso nur alt aussehen... Gruß aus Berlin Michael
Hallo, ich hoffe ja, daß zumindest David noch im Boot ist... Ich habe mich jetzt mal mit meinem tollen Träger etwas über die FiFo-Version hergemacht. Erste Erkenntnis: Der Arduino UNO mit Mega16U2 bekommen im Gegensatz zum CH340 1MBit nicht auf die Reihe, mehr als 230400 geht nicht stabil. Macht es etwas umständlich, mir "mal schnell" ein Bild anzeigen zu lassen. Kamera-Init habe ich erstmal grob nach dem Application-pdf auf die 12MHz meiner FiFo-version gesetzt. Grob, weil statt der 15 Fps nur 7,5 Fps von der Kamera ausgegeben werden, da stimmt also noch was nicht. FiFo lesen scheint zu passen und einlesen von der Kamera wohl auch, ich bekomme zumindest identsche Bilder geliefert, auf denen ein zufällig im Bildfeld befindlicher USB-Stecker mit einem Schild mit Barcodes drauf zumindest gut zu identifizieren ist... Jetzt ist aber erstmal andere Beschäftigung dran. Gruß aus Berlin Michael
Michael U. schrieb: > Kamera-Init habe ich erstmal grob nach dem Application-pdf auf die 12MHz > meiner FiFo-version gesetzt. Verstehe nicht ganz, was Du damit meinst. > Grob, weil statt der 15 Fps nur 7,5 Fps von > der Kamera ausgegeben werden, da stimmt also noch was nicht. Du hast beachtet, dass die Schreiber des Implementation Guide von einem Szenario mit 24MHz-Quarz ausgehen, wir aber nur einen 12MHz-Quarz auf dem Board sitzen haben? > FiFo lesen scheint zu passen und einlesen von der Kamera wohl auch, ich > bekomme zumindest identsche Bilder geliefert, auf denen ein zufällig im > Bildfeld befindlicher USB-Stecker mit einem Schild mit Barcodes drauf > zumindest gut zu identifizieren ist... Welchen Code verwendest Du? Ich bin allerwärmstens daran interessiert. Ich selber habe irgendetwas in meinem Code verschlimmbessert und nun bekomme ich noch nicht einmal mehr die schwachen Bilder aus dem Teil herausgefischt. Und dabei habe ich sogar noch einen kapitalen Fehler in meiner Software gefunden, der erklärt, warum das Bild so unglaublich blass war. Aber aktuell ist leider "rien ne vas plus" angesagt. Viele Grüße Igel1
Andreas S. schrieb: > Du hast beachtet, dass die Schreiber des Implementation Guide von einem > Szenario mit 24MHz-Quarz ausgehen, wir aber nur einen 12MHz-Quarz auf > dem Board sitzen haben? Ja - spannend. Da geht dann wieder die "Raterei" los - auf die ich (wen wundert es) keine Lust habe. Im tollen "Software Implementation Guide" kommt auch nicht viel mehr. Das ist eine "Totgeburt", welche mich "Gott-sei-Dank" nur ca. 10 € (für 4 Module - wer will noch welche?) gekostet hat.
Hallo, Andreas S. schrieb: > Du hast beachtet, dass die Schreiber des Implementation Guide von einem > Szenario mit 24MHz-Quarz ausgehen, wir aber nur einen 12MHz-Quarz auf > dem Board sitzen haben? ich benutze immernoch die Arduino-Software, läßt sich auch problemlos auch im alten AVR-Studio 4.18 compilieren. Ich habe nur das PinOut an die FiFo-Version angepasst und die Initialisierung entsprechend geändert. Dann habe ich captureImg() vom Auslesen der OV7670 ohne FiFo und rausschicken auf die FiFo-Geschichte umgebaut. Dabei fiel mir dann auf, das wohl der Uno nicht mit 1MBuad klarkommt. usw. usw. Die ursprüngliche Sourve betrieb ja die OV7670 ohne FiFo mit 8MHz XCLK vom AVR erzeugt und hatte auch die Teiler noch "seltsam" gesetzt. Die 12MHz Registerwerte stammen aus der OV7670 Applikation.pdf Punkt 3.1 zweiter Block: 15fps PCLK = 12Mhz Da bekam ich aber nur 7,5 fps raus. Jetzt kommt dann Dieters berechtigte Maulerei zum Zuge... ;) Register CLKRC (0x11) hat einen default von 0x80. Bit 7 ist aber als Reserved angegeben. Mit 0x00 teilt der Kram aber definitv durch 2... Mit 0x80 (default) teilt es durch 1 (teiler aktiv, Teilerwert 0 000 + 1. bit 7 ist also wohl nicht so "reserved" wie angegeben, eigentlich müßte auch 0x40 (kein Vorteiler) richtig sein, muß ich morgen mal testen. Problem ist im Moment, daß in der Source für die OV7670 ohne FiFo ziemlich an den Werten rumgebogen wurde, um bei einer Baudrate von 1MBaud, also rund 100kB/pro Sekundedie Kamera auch einen PCLK von 100kHz zu bekommen und (manchmal) ein Bild zustande zu bringen. Das muß ich erstmal auf sinnvolle Werte bringen. Ich habe zwar noch eine Source mit FiFo gefunden, was der da aber treibt ist mir noch völlig unklar... Gruß aus Berlin Michael
Hallo zusammen,
huch hier ist jetzt aber schlechte Stimmung aufgekommen :D
Freut euch doch erstmal, dass es bei euch soweit schon geht...
>Aber aktuell ist leider "rien ne vas plus" angesagt.
:D der ist gut... :D
Zum Thema Oszi, nein ich würde mich aktuell nicht über meinen
Arbeitgeber beschweren, aber nach einem halben Jahr Arbeiten habe ich
leider das Zinslose Schuldenkonto bei meinen Eltern noch nicht tilgen
können, sodass ein Invest von über 100€ fürs "Bastel-Hobby" leider noch
nicht drin sind...
ABER da viel mir meine Fehlinvestition von 100€ während des Studiums ein
:D ein USB Oszi DDS140 von Sainsmart incl. Signalgenerator und
Logicanalyzer...Spart euch die Kommentare... Die Software war/ist
einfach so verbuggt, dass ein vernünftiger Umgang da leider nicht
möglich ist. Dann habe ich gestern aber im Netz ein Java-Programm
gefunden, dass mit dem kompatibel ist und siehe da, ich kann den Logic
analyzer in Betriebnehmen! (mit einigen abstrichen, aber auf den ersten
Blick siehts ganz gut aus.)
Ich nutze zwar eine leicht andere Sequenz als du für das schreiben, aber
in der Theorie sollte es passen.
Morgen komme ich hoffentlich nochmal dazu etwas auszuprobieren und
werde euch dann meine Sequenz mal offen legen.
Da ich ja leider auch von Fehlern in meinem Terminal Programm ausgehen
muss, wäre es super, wenn mir mal jemand erklären könnte, wie ich aus
dem Bytestream im Terminal (zb. H-Term) ein Bild zauber kann, um zu
überprüfen, ob mein Terminal auch wirklich das Empfangene anzeigt.
Danke und bis Morgen
David
Angehängte Dateien:

... wird laaangsam ... VG Igel1
David D. schrieb: > huch hier ist jetzt aber schlechte Stimmung aufgekommen :D Nö - keine schlechte Stimmung - nur etwas Frust, das es nur mit Raterei oder Abkupfern weiter geht :-\ Zur Bilderzeugung kann ich gerne mein Python-Scriptchen (primitiv - aber funktionierend und leicht anpassbar) zur Verfügung stellen (heute Abend). VG Dieter
> Zur Bilderzeugung kann ich gerne mein Python-Scriptchen (primitiv - aber > funktionierend und leicht anpassbar) zur Verfügung stellen (heute > Abend). das wäre subba :)
Angehängte Dateien:
-

Write_Read.PNG
19 KB
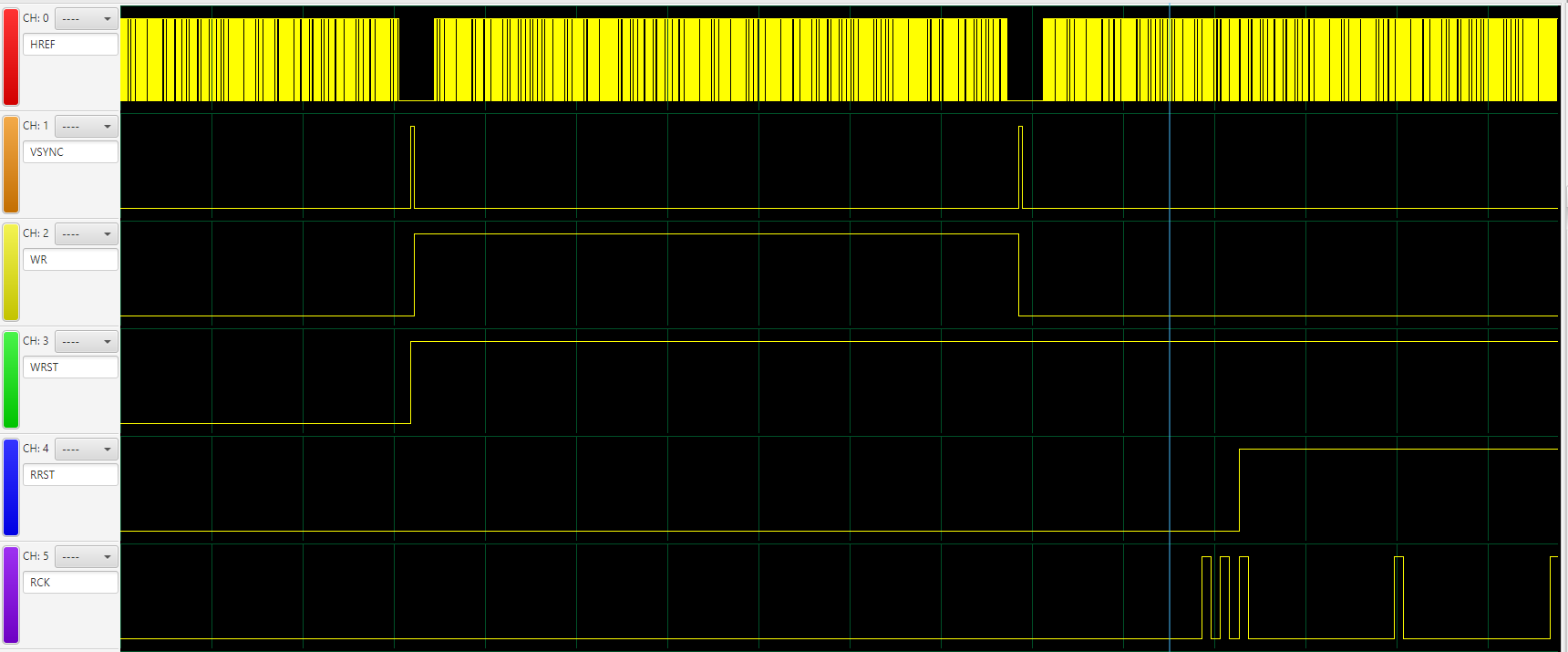
Sooo.... 1. Möglichkeit: Ich habe es einfach IMMERNOCHNICHT verstanden... 2. Möglichkeit: Mein Terminal Programm funktioniert nicht. Anbei meine Signalverläufe, mit einem mehr oder weniger zuverlässigem LogicAnalyzer... Dennoch denke ich, dass die Signalverläufe so sind wie dort aufgenommen, weil das auch meiner Programmierlogik entspricht. Gibt es da irgendetwas falsches dran? Ich danke euch für jeden Hinweis... Gruß David Edit: OE überigens auf GND
Angehängte Dateien:
-

Unbenannt.PNG
5 KB
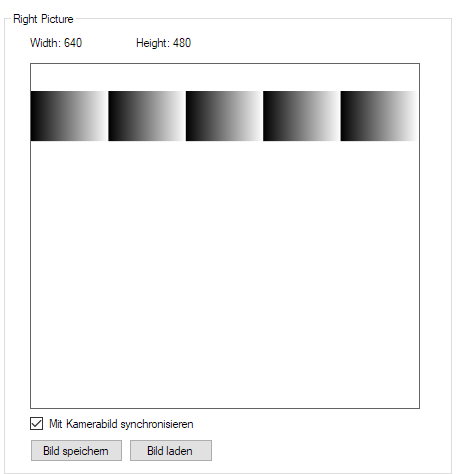
Am Terminal scheint es auch nicht zu liegen... wenn ich mit der gleichen Funktion ein hochzählendes Byte rausschicke zeigt mir das Terminal im yuv format was plausibles an.... Auch wenn der Bildstream dann irgendwann abbricht weil irgendwas nicht passt... wo liegt denn bloß mein Fehler :(
Hallo, @David D.: beim flüchtigen Hinsehen sieht es stimmig aus. Ich habe im Moment aber auch irgendwo Probleme mit der Übernahme Kamera -> FiFo, habe aber auch etwas rumgespielt und komme wohl erst morgen dazu, nachzuschauen. @ Dieter F.. am Python-Script hätte ich auch Interesse, einlesen mit TeraTerm v6.9 und speichern geht zwar zuverlässig, ist aber umständlich, Anzeige dann als RAW in Irfanview. @Andreas S.: würdest Du Deine Registerwerte zu obigem Bild hier reinstellen/anhängen? Ich habe zwischendurch mal nach und nach die Registereinstellungen aus dem Applikation-pdf mal etwas für mich kommentiert. Oha, oha, genaugenommen macht das Teil mehr als gut ist. ;) AGC, AWB, AEC, DeNoise, Colormatrix, Linsenkorrektur usw. usw. Sagt mir grundsätzlich zwar fast alles was, aber da kann und muß man sich an vielen Stellen auf die Herstellerwerte verlassen. Ich denke auch, daß damals, als die Dinger aktuell ware, Firmen, die Stückzahlen für z.B. eine Webcam beteltt haben, einfach sagen konnen, das sie passende Initwerte für die Sensor-Charge und Optik xy dazu haben wollen und die auch bekamen. Ich hänge das mal hier an, ist das default-array für die verlinkten Arduino-Sourcen. Gruß aus Berlin Michael
David D. schrieb: > das wäre subba :) Auf eigene Gefahr ... :-) Das Script schreibt halt jede Menge Bilder in den aufrufenden Pfad ...
Hallo, Dieter F. schrieb: > Auf eigene Gefahr ... :-) Danke, ich liebe die Gefahr. ;-) Gruß aus Berlin Michael
Hui - hier hat sich wieder viel getan.
Fangen wir mit David an:
Schön, dass Dein LA nun funktioniert! Und sehr löblich,
den Kredit an Deine Eltern zurückzuzahlen und dafür auf
Hobby-Equipment zu verzichten - scheinst ein feiner Kerl zu sein.
Was Deine Signale angeht, so sehen die gut aus (wenn man es
riskieren möchte, entgegen dem AL422B-Datenblatt den RCK-Takt
nicht durchlaufen zu lassen).
Und nun zu Michael:
> würdest Du Deine Registerwerte zu obigem Bild hier reinstellen/anhängen?
Aber gerne:
1 | static unsigned char OV7670_QVGA[][2]= |
2 | {
|
3 | 0x12, 0x80, |
4 | |
5 | 0x11, 0x01, // see Implementation Guide "30 fps QVGA YUV mode" |
6 | 0x12, 0x10, // original: YUV422 = 0x00; |
7 | 0x40, 0xD0, // original: not set |
8 | 0x0C, 0x04, |
9 | 0x3E, 0x19, |
10 | 0x70, 0x3A, |
11 | 0x71, 0x35, |
12 | 0x72, 0x11, |
13 | 0x73, 0xF1, |
14 | 0xA2, 0x02, |
15 | |
16 | 0x13, 0x8B, |
17 | REG_COM9 , 0x6A, // 128x gain ceiling; 0x8 is reserved bit |
18 | |
19 | 0x4f , 0x80 , // "matrix coefficient 1" |
20 | 0x50 , 0x80 , // "matrix coefficient 2" |
21 | 0x51 , 0 , // vb |
22 | 0x52 , 0x22 , // "matrix coefficient 4" |
23 | 0x53 , 0x5e , // "matrix coefficient 5" |
24 | 0x54 , 0x80 // "matrix coefficient 6" |
25 | }; |
Achtung, grosse Erkenntnis: Eigentlich würde man bei diesen Werten ein 320x240 QVGA-Bild im RGB-Modus erwarten. Aber: April, April. Heraus kommt ein 315x240 Bild !! Wäre ich nicht vor 1,5 Jahren schon darauf gestoßen, hätte es mich sicherlich Tage gekostet, das zu bemerken. Mein Tipp des Tages lautet daher: Prüft mit dem Oszi oder mit dem LA genau die Länge der HREF- Pulse und rechnet zurück, ob die von Euch erwartete Zeilenbreite bei der von Euch gesetzten Taktrate auch tatsächlich zu der Länge des HREF-Pulses passt. In meinem Fall konnte ich so exakt auf die 315 Pixelbreite einer Zeile schließen. Schon bei geringen Abweichungen in der Darstellung - ich habe zunächst mit 320 Pixel/Zeile dargestellt - kann man kein Bild mehr erkennen/erahnen. Und zum Schluss zu Dieter: Saubere Leistung: Blitzeblanker Code - kein Kommentar trübt die Ästhetik - daran erkennt man den Hardcore-Programmierer :-) Aber einem geschenkten Gaul guckt man ja bekanntlich nicht ins Maul, also: Danke für den Code! Sobald ich mit meinem LCD-Display nicht mehr zufrieden bin, kommt Dein Code zum Einsatz. Viele Grüße Igel1
Hallo, erstmal Danke für Deine Registerwerte, ich hoffe mal, ich komme morgen dazu, was damit zu machen. Andreas S. schrieb: > Und zum Schluss zu Dieter: > > Saubere Leistung: Blitzeblanker Code - kein Kommentar trübt > die Ästhetik - daran erkennt man den Hardcore-Programmierer :-) > Aber einem geschenkten Gaul guckt man ja bekanntlich nicht ins > Maul, also: Danke für den Code! Sobald ich mit meinem LCD-Display > nicht mehr zufrieden bin, kommt Dein Code zum Einsatz. naja, ich habe von Python keine Ahnung, aber den Ablauf kann ich auch ohne Kommentare verstehen. Die Python-spezifischen Sachen müßte ich ohnehin googeln... :-) Gruß aus Berlin Michael
Michael U. schrieb: > naja, ich habe von Python keine Ahnung, aber den Ablauf kann ich auch > ohne Kommentare verstehen. Die Python-spezifischen Sachen müßte ich > ohnehin googeln... :-) Nu fall Du mir nicht auch noch in den Rücken, wenn ich hier gerade versuche, Dieter auf den Pfad der Tugend zu bringen! Viele Grüße Igel1
mein Problem ist, dass ich die Baudrate nicht hochsetzten kann... dann kommt nur noch mist am PC an... und ich weiß nicht warum... ich bin mit leppigen 19200 im rennen -.- okay habe es jetzt mal geschafft meinen RCK auf 500Hz anzuheben... vlt. geht noch mehr... aber wie macht ihr das denn, wenn ihr RCK "durchlaufen" lasst? mit welcher taktrate lest ihr aus?
David D. schrieb: > mein Problem ist, dass ich die Baudrate nicht hochsetzten kann... dann > kommt nur noch mist am PC an... und ich weiß nicht warum... ich bin mit > leppigen 19200 im rennen -.- > > okay habe es jetzt mal geschafft meinen RCK auf 500Hz anzuheben... vlt. > geht noch mehr... aber wie macht ihr das denn, wenn ihr RCK > "durchlaufen" lasst? mit welcher taktrate lest ihr aus? Ich lasse RCK mit 10kHz durchlaufen und schreibe die Pixel dann Pixel für Pixel auf das LCD-Display auf meinem Board. Ich nutze also gar kein UART. Viele Grüße Igel1
Angehängte Dateien:
-

20190207_005340.jpg
190 KB -

20190207_005319.jpg
220 KB

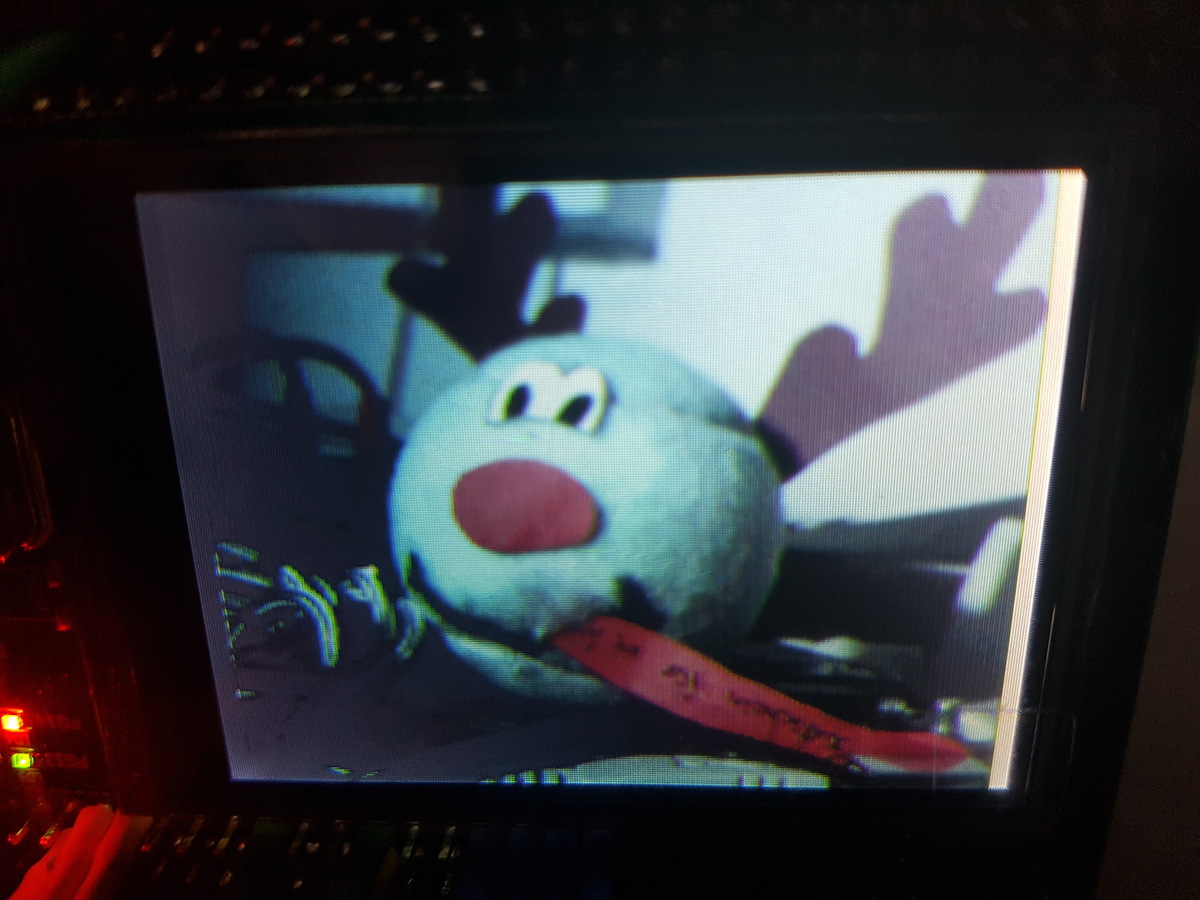
Hi, anbei das Foto des Tages (links Original, rechts OV7670-Aufnahme dargestellt auf 2.4 Zoll ILI9341 TFT LCD Billig-Display ) Register-Settings:
1 | static unsigned char OV7670_QVGA[][2]= |
2 | {
|
3 | 0x12, 0x80, |
4 | |
5 | 0x11, 0x00, |
6 | 0x12, 0x14, // original: YUV422 = 0x00; |
7 | 0x40, 0xD0, // original: not set |
8 | 0x0C, 0x04, |
9 | 0x3E, 0x19, |
10 | 0x70, 0x3A, |
11 | 0x71, 0x35, |
12 | 0x72, 0x11, |
13 | 0x73, 0xF1, |
14 | 0xA2, 0x02, |
15 | |
16 | 0x13, 0x8B, |
17 | REG_COM9 , 0x6A, // 128x gain ceiling; 0x8 is reserved bit |
18 | |
19 | 0x4f , 0x80 , // "matrix coefficient 1" |
20 | 0x50 , 0x80 , // "matrix coefficient 2" |
21 | 0x51 , 0 , // vb |
22 | 0x52 , 0x22 , // "matrix coefficient 4" |
23 | 0x53 , 0x5e , // "matrix coefficient 5" |
24 | 0x54 , 0x80 // "matrix coefficient 6" |
25 | }; |
So weit, so gut, aber jetzt kommen die Überraschungen: Zeilenlänge: 313 Pixel a 2 Bytes pro Pixel Farbfolge: [Byte1][Byte2] : [GGGGGRRR][RRRBBBBB] ... wer hätte das gedacht ... Viele Grüße Igel1 PS: das OV7670-Bild ist in Wirklichkeit noch etwas besser als hier im Anhang abgebildet - beim Abfotografieren und Hochladen geht etwas Qualität futsch.
Hallo, sicher? Entweder 555 oder 565, 6 Bit ist aber immer Grün weil der Mensch bei grün das bessere Detailauflösungsvermögen hat. Rot und Blau sieht man schlechter, da reichen dann weniger Bits. Die Kamera ist noch stark an TV angelehnt, auch das interleave YU/YV über 2 Zeilen ist dafür typisch, kann man gut TV-Signale draus basteln R-Y und B-Y werden da übertragen, G-Y wird daraus dann per Matrix gewonnen. Rührt auch von TV hier, mal konnte bei PAL/SECAM/NTSC sinnvoll nur ein Farbsignal zusätzlich in die Zeile packen (Kompatibilität zu s/w war damals noch sehr wichtig). Für Display braucht man sowas nicht mehr. Grrr, ungewöhnlich für mich, mitten in der Nacht, ich werde wach und bin putzmunter... Gruß aus Berlin Michael
Andreas S. schrieb: > Nu fall Du mir nicht auch noch in den Rücken, wenn ich hier gerade > versuche, Dieter auf den Pfad der Tugend zu bringen! Moin, das habe ich einfach nur mal auf die Schnelle gemacht - soll auch nicht bleibend sein. Einfach nur ein Script-Arbeitsstand. Meine Programme sehen besser aus :-) und für den Pfad der Tugend bin ich zu alt. Ansonsten: Schönes Bild, gratuliere ... VG Dieter
Angehängte Dateien:
-

Cam-Farbbalken.jpg
11 KB
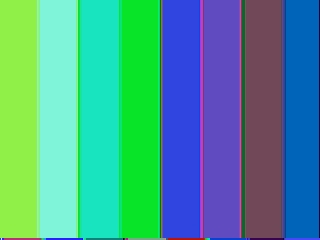
Hallo, @Andreas S.: ich nehme erstmal alles zurück und behaupte das Gegentum. Ich habe mal den Farbbalken angemacht, das sieht aber mehr als komisch aus... Ich muß aber bei meinen Registerwerten erstmal wieder Ordnung machen. RGB565 scheint aber hier schon zu passen. Bei mir sind unten die letzten Zeilen nicht mehr sinnvoll gefüllt. Aber erstmal wieder anderen Dingen widmen... Gruß aus Berlin Michael
Dieter F. schrieb: > Meine Programme sehen besser aus :-) und für den Pfad der Tugend bin ich > zu alt. Oh, dann ist also Hopfen und Malz bei Dir schon verloren. Na dann müssen wir Dich (und Deine Programme) halt so nehmen, wie Du bist ;-) ;-) :-) > Ansonsten: Schönes Bild, gratuliere ... Oh dankeschön! So ein bisschen Anerkennung tut ja jedem Hobby-Bastler gut ... Viele Grüße Igel1
Michael U. schrieb: > @Andreas S.: ich nehme erstmal alles zurück und behaupte das Gegentum. Probate Vorgehensweise - mache ich auch immer so :-) > Ich habe mal den Farbbalken angemacht, das sieht aber mehr als komisch > aus... Mit welchen Register-Settings hast Du welchen Farbbalken aufgenommen? Evtl. möchtest Du beides noch nachlegen. > Ich muß aber bei meinen Registerwerten erstmal wieder Ordnung machen. Ordnung wird total überschätzt - versuche ich seit Jahren meiner Besseren Hälfte klar zu machen ... > RGB565 scheint aber hier schon zu passen. Das ist das größte Mysterium, mit dem ich aktuell kämpfe - bei mir passt es so gar nicht. Wie kann das nur sein? > Bei mir sind unten die letzten > Zeilen nicht mehr sinnvoll gefüllt. Hmmm - scheint aus dem Takt zu kommen ... > Aber erstmal wieder anderen Dingen widmen... Ja, ja - die Rentner ;-) > Gruß aus Berlin > Michael Grüße aus Aachen Igel1
Angehängte Dateien:
-

Cam-Farbbalken_2.jpg
9,8 KB
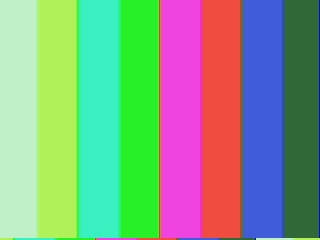
Hallo, Andreas S. schrieb: > Mit welchen Register-Settings hast Du welchen Farbbalken aufgenommen? > Evtl. möchtest Du beides noch nachlegen.
1 | das sind die von der Kamera erzeugten Color Bars. |
2 | { 0x12, 0x16 }, // COM7 - Selects QVGA [4] und RGB [2][0] [1] color bar on
|
3 | { 0x42, 0x08 }, // COM17 - AEC Window [7:6] Bit 1 und 0 wie COM4 [5:4], DSP Color Bar on/off[3]
|
Andreas S. schrieb: >> Bei mir sind unten die letzten >> Zeilen nicht mehr sinnvoll gefüllt. > > Hmmm - scheint aus dem Takt zu kommen ... bisher keine Ahnung, wo, vermutlich schon falsch von der Kamera in den FiFo, das Muster bleibt immer identisch. Andreas S. schrieb: > Ja, ja - die Rentner ;-) bekanntermaßen haben die niemals Zeit... :-)) ok, gerade mal am Timing beim FiFo lesen etwas rumgespielt, sieht jetzt schon mehr nach Farbbalken aus. Vielleicht hätte ich einfach mal oben schauen sollen, wie Du das machst? Gruß aus Berlin Michael
Angehängte Dateien:
-

Cam-Farbbalken_3.jpg
9,5 KB -

Cam-Pic.jpg
57 KB -

Chaos.jpg
150 KB
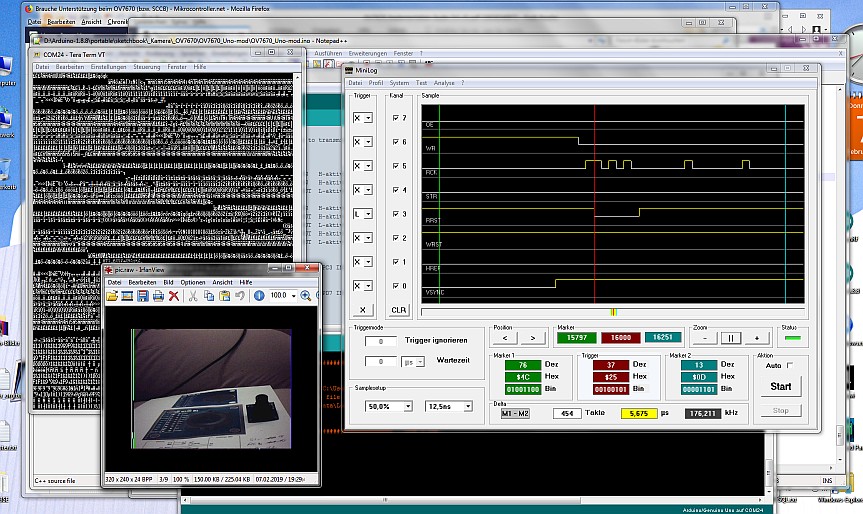
Hallo, so, mühsam ernährt sich das Eichhörnchen... Ich habe das ino mal angehängt, am Ende den Arduino-Block auskommentieren und den AVR-Studio Block aktivieren, dann geht es auch als Studio Projekt zu compilieren. Änderungen: Gamma-Werte auf die defaults aus dem Datenblatt gesetzt, passt erstmal ganz gut. ov7670_default_regs sind die Settings aus Applikation, nur Gamma verändert. Rest in regval_list yuv422_ov7670 und rgb565_ov7670 ist zusammengesucht, aber nur noch mit den rgb565 Settings getestet. Chaos damit Andres S. auch seine Freude hat. :-) PS: Baudrate steht auf 230400, mehr macht mein UNO mit dem Mega16U2 als USB-Wandler nicht stabil... PPS: Format ist definitiv RGB565, BigEndian. Gruß aus Berlin Michael
Angehängte Dateien:
-

20190207_225904.jpg
240 KB
@Michael: danke für die Tipps - die Colorbalken wollte ich mir auch schon immer einmal anschauen, war bislang nur zu faul, die Register zusammenzusuchen. Meine Ausgabe findest Du im Anhang. Jetzt können wir rätseln, welche Ausgabe nun richtig ist ... Ich finde meine auch ganz hübsch :-) Aber korrekt wird vermutlich nur eine von beiden sein (wobei mein 4€ China-TFT-LCD Display sicherlich auch einiges an Fehlern in die Sache reinbringt. Ich bin aktuell noch zu faul, mir Code für die Ausgabe in Richtung PC zu stricken. Mit so einem ARM-Prozessor braucht's da doch immer etwas mehr Überwindung als mit einem Arduino, wo alles schon parat liegt. Viele Grüße Igel1
Vielen Dank für eure Dateien, die werde ich mir dann am Wochenende anschauen. Bei mir ging oberhalb von 38400 dann garnix mehr... jetzt habe ich es spaßeshalber auf 2 000 000 Baudrate gestellt... ja! 2MBaud... und es scheint zu laufen! mit dem Atmega238P :D... ich bin total fasziniert... mal schauen ob ich morgen mal vom RAW auf das RGB format umschalten kann... ist aber einiges an implementierungsaufwand im Terminal... aber vielleicht lohnt es sich ja. So scheine ich nicht auf einen grünen Zweig zu kommen. @Igel aus Aachen? das ist ja lustig! ich komme ursprünglich aus Stolberg
Angehängte Dateien:
-

Foto_08.02.19__00_45_01.jpg
230 KB -

Foto_08.02.19__00_42_22.jpg
240 KB

Ich kapier die Welt nicht mehr: Wenn ich die Werte noch RGB565-Manier einlese, und an das LCD-Display sende, so bekomme ich exakt Michaels Testbild. Wenn ich dann das Testbild abschalte und meinen Balli fotographiere, so hat er auf dem Bild eine knallgrüne Nase (statt einer roten Nase). Ich gucke langsam schon fast so wie mein Ball ... Grüße Igel1
David D. schrieb: > 2MBaud... und es > scheint zu laufen! mit dem Atmega238P Auf Sender-Seite ja - Python schafft den Empfang aber nicht richtig (max. 1 MBaud) - daher hatte ich auch "Verzerrungen" im Bild.
Angehängte Dateien:
-

Farbbalken.jpg
56 KB
Hallo, Andreas S. schrieb: > Ich kapier die Welt nicht mehr: Wie sprach das grüne Tentacle in Maniac Mansion? Ich bin ja soooo deprimiert... ;-) Im Anhang mal ein Original Farbbalkenbild (Ausleihe aus der Burosch-Test-Beschreibung). Von weiß nach schwarz: Blau: Ein-Aus-Ein-Aus-Ein-Aus-Ein-Aus. Rot: Ein-Ein-Aus-Aus-Ein-Ein-Aus-Aus Grün: Ein-Ein-Ein-Ein-Aus-Aus-Aus-Aus Konnte man auch ganz früher schon gut mit einfacher Frequenzteilung eines Rechtecksignals erzeugen. Andreas S. schrieb: > Ich bin aktuell noch zu faul, mir Code für die Ausgabe in Richtung PC zu > stricken. Mit so einem ARM-Prozessor braucht's da doch immer etwas mehr > Überwindung als mit einem Arduino, wo alles schon parat liegt. hmmm... Arduino ist an meinem Kram ein Name für das AVR328 Modul und die IDE. Das ist plain C für einen AVR, die die Bytes nimmt und in den Hardware-UART tütet. Kann auf einem STM außer der anderen UART-Init ja kaum anders sein. Auf PC-Seite lesen ich ja immernoch mit TeraTerm als binär-Log ein (dehalb ja die 30s Pause, weil ich da immer im Menü rumklicken muß) und lasse IrfanView als RAW anzeigen (dehalb nur die reinen Bilddaten, sonst müßte ich überflüssige Daten erst om Hex-Editor wieder abschneiden. Die Display habe ich auch hier, allerdings müßte ich da ziemlich mit der Pinbelegung der IOs tricksen, ein AVR328 hat soviele nicht... Da ich mit dem UART nur sende, könnte ich mal schnell einen Webserver auf einen ESP8266 werfen, die Daten vom AVR zum ESP schicken und mir das Bild im Browser anschauen. Wäre zwar von hinten durch die Brust ins Auge, macht aber eigentlich keinen Aufwand... Eine Erklärung für Deine grüne Nase habe ich nicht, die Einstellungen für den Analogteil (AGC/AEC/Colormatrix usw.) sind bei mir orignal die Init aus der Applikation, die geben mit auch noch ein paar Rätsel auf. Die Nase kann ja nur da zwischen Bildensor und ADC-Ausgabe versaut werden, beim Farbbalken greifen die ja nicht, den erzeugt der DSP ja erst dahinter. Gruß aus Berlin Michael
Angehängte Dateien:
-

Cam-Hof.jpg
67 KB

Hallo, so, mal versucht, einen Blick Richtung Hof zu bekommen. Leider reicht der FiFo ja nicht für 640x480, gedacht ist der ja nur für Interlace-Halbbilder bis 720x480, also 2x 720x240. Würde praktisch aber auch keinen Sinn machen, weil bei unserer Auslesegeschwindigkeit die geraden/ungeraden Zeilen aus zeitlich weit auseinanderliegenden Bildern kämen. Bei Bewegung im Bild also nur Schrott... Bleibt also in der Geschichte bei 320x240. Gruß aus Berlin Michael
Angehängte Dateien:
-

20190208_203643.jpg
230 KB
Hi Leute, Michael hatte ja 7 Beiträge weiter oben Code mit Register-Settings eingestellt und dann geschrieben: > so, mühsam ernährt sich das Eichhörnchen... [...] > Chaos damit Andres S. auch seine Freude hat. :-) ... und Andreas hatte seine Freude ... Zum Glück ist ihm aufgefallen, dass er zuerst ov7670_default_regs und dann erst rgb565_ov7670 einladen musste, weil sich die Werte überschreiben. Im Nachhinein eigentlich logisch, aber beim ersten Kopieren nicht sofort klar. Sodann nochmals ein paar Minuten wildes Probieren wg. Zeilenlänge (irgendwann war ich's dann leid und habe es wieder aus der Länge des HREF-Signals berechnet: 311 Pixel !!) und voila: im Anhang findet Ihr das Ergebnis: definitiv das bislang farblich beste Bilder. Interessanterweise passt mit Michaels Register Settings nun auch das RGB565-Format sauber, so wie ich es erwartet hätte. Einzig die Vertikalstreifen links stören noch etwas (siehe Bild) Ihr scheint dieses Problem nicht zu haben? Viele Grüße Igel1
Hallo, na wird doch langsam. :-) Andreas S. schrieb: > Einzig die Vertikalstreifen links stören noch etwas (siehe Bild) > Ihr scheint dieses Problem nicht zu haben? doch, sieht man auch auf meinen Bildern. Im Moment ist die Windowsposition auf "automatisch" was das auch immer heißt. Ich werden das mal auf manuell setzen. Register 0x3A (TSLB) Bit [0] muß ich mir auch noch anschauen. Ansonsten eben Register 0x17...0x1a [HSTART/HSTOP/VSTRT/VSTOP]. Dummy-Zeilen und Pixel kann man auch noch einfügen, wo und wozu? Noch keine Ahnung. Der Sensor selbst hat ja 656x488 Pixel, da darf man wohl das Window erst auf den aktiven Bereich anpassen... Den kompletten Code habe ich für mich sowieso jetzt erstmal zusammengestrichen, ist nach wie vor Bastelstelle. YUV werde ich noch testen, als s/w Bild spart es übertragene Bytes. Die Aufrufe werde ich morgan mal in #defins und #ifdef verpacken für RGB, YUV und auch für Color Bar on/off. Spielt sich besser mit rum. Gruß aus Berlin Michael
Michael U. schrieb: > na wird doch langsam. :-) Na ja - aber leider bei den Falschen ... Eigentlich wollten wir doch David helfen und nun müssen wir es erst einmal selber auf Kette bekommen. Ich hoffe, David wird nicht davon frustiert, dass es bei uns inzwischen halbwegs läuft und bei ihm noch nicht so ganz. Aber immerhin haben wir ihm nun etwas Grundlagenforschung abgenommen. Wenn man wenigstens eine funktionierende Register-Kombination kennt, tappt man nicht ganz so im Dunkeln - man weiß dann wenigstens, dass etwas Vernünftiges aus der Kamera herauskommt und kann sich auf die Fehlersuche im eigenen Code konzentrieren. @David: bitte lade doch einmal Deinen aktuellen Code hier hoch - dann können wir etwas stöbern. Deine Steuersignale sahen ja schon mal gut aus - kann eigentlich nur noch an der AL422B Ausleseroutine liegen. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > Eigentlich wollten wir doch David helfen und nun müssen wir es erst > einmal selber auf Kette bekommen. habe ich auch immer wieder mal drüber nachgedacht, deshalb auch mein kurzer TEst im alten AVR-Studio, dans sollte auch im aktuellen gehen. Deshalb auch der Kampf mir dem Mega328. ;) > Ich hoffe, David wird nicht davon frustiert, dass es bei uns inzwischen > halbwegs läuft und bei ihm noch nicht so ganz. er wollte ja im Ursprung jedes Fahrad selbst erfinden, an sich sehr löblich und sinnvoll. Allerdings bin ich immernoch der Meinung, daß so eine Kamera zusammen mit einem Mega328 kein sinnvoller Ansatz ist. OV2640/ESP32 liegt ja hier mehrfach rum und läuft auch prinzipiell, aber nicht nach meinen Vorstellungen, da werde ich weitermachen. Sein Ansatz mit seinem PC-Programm ist meiner Meinung nach auch ziemlich komplex. Ich bin jetzt mehr denn je der Meinung, daß man mit einzelnem Register ändern dabei nur den Heldentod stirbt... Ich hatte ja kurz überlegt, auch ein VB6-Programm für den schreiben, damit Übertragung und Bilddarstellung schell zu prüfen sind. Ich bin bei bewährtem TeraTerm und Irfanwiev) geblieben, weil ich wußte, daß beide das gewünschte zuverlässig leisten, nur die Bedienung ist eben fragwürdig, ich scahffe es aber inzwischen in unter 10s bis ich das Bild sehe. ;) Irfanwiev kann als RAW so ziemlich alles laden, was man in Bytes packen kann. Das selber zu machen wäre zwar machbar, nur hätte ich dann ein tolles Programm, das ich ohne größere Umbauten wohl nie wieder brauche... Bei meinen Gedanken, die Routinen von David in meinen Source zu packen und zu testen, habe ich dagegen fast keine Arbeit. Übertagen und Kam-Init habe ich da dann im Zweifel immer sicher, um den Bereich einzugrenzen, wo es bei ihm klemmt. Baudrate usw. ist dabei ja auch egal, ist ein Byte im UART-Init und eine Auswahl in TeraTerm. Den UNO flashen dauert keine 15s. Ich hoffe also schon, daß David nicht verschreckt abspringt. Gruß aus Berlin Michael
Michael U. schrieb: > YUV werde ich noch > testen, als s/w Bild spart es übertragene Bytes. YUV, RGBxxx sind alles errechnete Formate. Die originäre Auflösung (640 x 480) bekommt ihr im RAW Bayer Format. Da werden die einzelnen Pixel-Helligkeiten als Byte übergeben. Das bekommt man auch in den Fifo. Das ist auch alles, was die Sensoren können. Leider liegt eine Linsen-Maske über dem Sensor-Array, was (durch Lichtbrechung? - das kann ich nicht deuten) die Helligkeiten wie ein Farbfilter beschränkt. Die Umrechnunng macht der DSP in der Kamera oder man selbst, wenn man denn will. VG Dieter
Hallo, @ Dieter F.: alles zutreffend. Für mich ist die Kamera und der Sensor ein Produkt für damals preiswerte Überwachungs-Cams und Webcam gewesen, kein Meßgerät. Ziel, auch der Möglichkeiten des Kamera-DSP, sehe ich darin, ein subjektiv stimmiges Bild zu erzeugen, kein identisches Abbild der Wirklichkeit in diesem Bereich. Gruß aus Berlin Michael
Dieter F. schrieb: > Die originäre Auflösung (640 > x 480) bekommt ihr im RAW Bayer Format. Heisst das: wenn cih RAW Bayer Format einstelle, wird der DSP komplett umgangen? Viele Grüße Igel1
Andreas S. schrieb: > Heisst das: wenn cih RAW Bayer Format einstelle, wird der DSP komplett > umgangen? Jein - es findet halt keine Umrechnung in ein "Farbformat" statt. Ob White-Balancing etc. noch ausgeführt werden weiß ich nicht. VG Dieter
Angehängte Dateien:
-

Test41.bmp
47 KB
Hallo zusammen, >Eigentlich wollten wir doch David helfen und nun müssen wir es erst >einmal selber auf Kette bekommen. > >Ich hoffe, David wird nicht davon frustiert, dass es bei uns inzwischen >halbwegs läuft und bei ihm noch nicht so ganz. doch solangsam wird er es :D ... aber nach einem Tief kommt auch immer wieder ein Hoch... Habe jetzt wieder 2 Std. damit verbracht einen urplötzlich auftretenden Fehler zu suchen mit dem plötzich garnichts mehr ging... sogar den Code von gestern Nacht habe ich wieder zurück genommen. Nichts.... Lösung: den billigen Logic Analyzer nicht unbestromt an den Pins hängen lassen, weil er sonst die einzelnen Potentiale so runter zieht, dass Sie zwar auf dem Oszi noch genauso zu erkennen sind wie vorher (wenn man nicht auf die Spannung schaut) aber vom Atmega nicht mehr erkannt wird. Sprich meine while schleife vom VSync bleibt einfach hängen... Als hätte ich keine anderen Probleme... Die Ursprüngliche Idee des Terminals war ja dafür gedacht um bequem register ändern zu können, ohne jedes mal neu flashen zu müssen. Um den "Re-Use" des Programms möglichst groß zu halten habe ich mir vorgenommen, das uC-Programm so einfach wie möglich zu halten um es später ggf. auch für andere Controller möglichst anwendbar zu machen. Ich danke euch für all die Informationen und Register Werte die ihr in der Woche zusammen getragen habt... Diesmal nehme ich mir vor sie jetzt erstmal alle zu sammeln und für mich zu Bewerten damit ich nicht wieder die Lösung vor den Augen habe und sie übergehe... Zum Imager: jeder Pixel liefert nur einen Helligkeitswert (Ich denke so war es damals im Schwarzweiß Fernsehen-war aber vor meiner Zeit). Um Farbe in das ganze zu bringen gibt es das Bayer-Pattern, Hier werden über die verschiedenen Pixel farbfilter gelegt in meistens folgendem Muster: RGGB RGRGRGRGRG GBGBGBGBGB RGRGRGRGRG GBGBGBGBGB Jeder Buchstabe steht für einen Pixel und den jeweiligen Farbfilter: R= Rot G= Grün B= Blau. Grün kommt in einem Quadrat aus vier Pixeln immer zwei mal vor. Das ist vom menschlichen Auge abgeschaut, dass auf Grün wesentlich empfindlicher reagiert. Im RAW format schiebt der DSP also einfach die Helligkeitswerte auf den Ausgang ohne die Farbfilter zu beachten, sprich es kommt ein Schwarzweiß bild raus (wobei die Helligkeit der einzelnen Pixel schon von den Farbfiltern abhängt) Beim processed BAYER RAW wird über nen Algo für jeden Pixel durch die umliegenden Pixel eine Farbinformation RGB berechnet, sodass ich für jeden Pixel 3 Byte bekomme (RGB) mit letzterm Format habe ich es bisher versucht, weil es für mich am einfachsten zu händeln war (aber vergeblich) ich werde heute einmal schauen auf euer RGB565 zu kommen. So zumindest ist mein Verständnis, sollte ich hier was falsch verstanden haben? kurz zu den Auflösungen: VGA: 640*480 QCIF: 176*144 QVGA: 320*240 CIF: 352*288 Das sind die mit denen ich hier ins Rennen gehe. Wo kommen bei euch die Uminösen 311 Pixel bei HREF her? Anbei ein aktuelles Bild von mir -.- Schaue mir dann jetzt mal eure Register werte an... Aber ein Bild sollte ich doch, wenn auch in schlechter Qualität ohne einstellungen bekommen? (also 0x12 und 0x42 Colorbar jeweils an) Sowohl den Code vom AtmelStudio als auch den Sourcecode vom aktuellen terminal stelle ich euch nachher noch rein.
Hallo David, mein Tipp: fange erst einmal mit einer OV7670-Register-Kombination an, die 100% funktioniert und die Dir ein Colorbar-Testbild rauswirft. Dies ist solch eine Kombination:
1 | static unsigned char OV7670_QVGA[][2]= |
2 | {
|
3 | 0x12, 0x80, |
4 | |
5 | 0x11, 0x00 , // CLKRC - Teiler XCLK In -> intern 1:1 -> also 12MHz bei meinem Modul |
6 | 0x12, 0x16 , // COM7 - Selects QVGA [4] und RGB [2][0] [1] color bar, on 0x16 off 0x14 |
7 | 0x40, 0x14 , // COM15 - Selects RGB 565 [5:4] und Full Range [7:6] |
8 | 0x3a, 0x05 , // TSLB - Window auto, YUYV [00] Ausgabe - TSLB [3], COM13[0] |
9 | 0x42, 0x08 , // COM17 - AEC Window [7:6] Bit 1 und 0 wie COM4 [5:4], DSP Color Bar on/off[3], on 0x08 off 0x00 |
10 | |
11 | 0x15, 0x00 , // COM10 - PCLK auch bei HREF |
12 | }; |
Das Ergebnis ist ein Testbild mit 313 Pixel/Zeile und 240 Zeilen. Jedes Pixel besteht aus 2 Bytes, die nach RGB565 kodiert sind, also: [RRRRRGGG][GGGBBBBB]. Dabei wird das hier links dargestellte Byte als erstes Übertragen. Wenn das funktioniert, so ändere die Werte von Register 0x12 auf 0x14 und Register 0x42 auf 0x00 und Du bekommst Dein erstes "echtes" Bild - ziemlich schwache Farben, aber immerhin - ein Bild. Danach kannst Du weiterforschen. Das wäre meine Rat an Dich bzgl. Vorgehensweise. Viele Grüße Igel1
Angehängte Dateien:
-

Test49.bmp
50 KB
Hallo Igel, vielen Dank. Damit habe ich schonmal einen Fehler "enttarnt" was COM 15 angeht. 16 ist eben nicht 0x16... trotzdem schreibt ihr mit 0x14 doch in einem reserved Register rum oder nicht? Müsste es also nicht heißen 0x14: 0xD0 ? Leider bringt mich das umstellen der xResolution auf 313 auch nicht weiter. Ich scheine immernoch ein Problem mit dem FIFO zu haben. anbei ein Bild das aktuell rauskommt (QVGA (313px/Zeile)) RGB565 Immerhin habe ich diese "Zeilenstruktur" jetzt bei jedem Bild, allerding ändert sich die "Verzerrung" von der vermeitlichen ColorBar mal nach rechts und mal nach links...
@Dieter kannst du mir vielleicht sagen, wie du in den Pausen sendest? Dieter F. schrieb: > > QQVGA hat den Vorteil, dass nur jeder 4. HREF-Slot (im Vergleich zu VGA) > Daten enthält/übermittelt. Die "Totzeit" nutze ich für die serielle > Übertragung. > > VG > Dieter Ich denke eines meiner "Probleme ist wahrscheinlich, dass ich zwischen den einzelnen Zeilen pausiere um Rückmeldung vom Terminal zu geben, dass die Zeile angekommen ist. damit unterbreche ich RCK für 10,3ms... vielleicht rührt es daher und ich sollte mein Konzept nochmal überdenken und vlt. doch den ganzen Frame übertragen...
Unter folgendem Link sind zu finden: https://github.com/igittigitt/ov7670/tree/TWI-Interfac - Das Terminal Programm als release (zum Direkt ausführen: OV7670-Terminal_V0.3.zip) - Das Terminal als Solution zur Sourcecode einsicht in VS -Das Atmel Studio projekt mit allen C-Datein für den Arduino. Bitte HELFT mir :D .... @Igel kannst du vielleicht nochmal deine aktuelle Write und Read sequenz einstellen? Ich würde die gerne abgleichen.
David D. schrieb: > @Dieter kannst du mir vielleicht sagen, wie du in den Pausen sendest? Hallo David, da ich keinen Fifo nutze bringt Dir das wahrscheinlich nichts. Ich antworte aber gerne. Das Auslesen basiert auf den VGA-HREF-Frames. Schau Dir dazu bitte das Datenblatt (Version 1.01) Seite 8 an. Also grundsätzlich 640 HREF-Frames pro Zeile (HREF-Intervall). Ich nutze aktuell das QQVGA-Format (160 x 120). In Figure 8 siehst Du, dass in in 4 VGA-HREF-Frames nur 1 QQVGA-HREF-Frame prozessiert wird - QVGA entsprechend 2, CIF und QCIF - orientiert an VGA und QVGA - entsprechend weniger. Der HREF-Takt orientiert sich also immer an VGA mit 640 Pixel pro Zeile - was nicht (vom Pixel-Takt) gebraucht wird, wird ausgeblendet. Bei dem von mir genutzten QQVGA habe ich 3 HREF-Takte Zeit, die im ersten HREF-Takt gelesenen Daten seriell an den PC (oder per SPI an ein Display) zu übertragen. Das ist nicht viel. Ich kann (das hast Du auch probiert) mit 2 MBaud vom ATMega328P (Arduino Nano-Basis) senden - (relativ) sicher empfangen kann ich mit Python aber nur ca. 1 MBaud. Bei 8 Daten-, 1 Start- und ein Stop-Bit sind das bei RGB (2 Bytes) ca. 20 µS pro Pixel (+ die UART-Verarbeitung für 320 Byte pro Zeile). Damit komme ich aktuell bei 1 MBaud auf ca. 0,6 Sekunden pro Bild (QQVGA). Erreichen kann ich das nur, wenn ich die Pixel-Clock (bei 16 MHz Takt am Eingang) entsprechend verlangsame (Register 0x11 etc.). Genau da fangen die Probleme an. Viele der Einstellungen für andere Register sind direkt oder indirekt von der Pixel-Clock abhängig - welche das sind ist nicht auf den ersten Blick ersichtlich. Genau da hört der Spaß für mich auf. Mit dem Fifo kannst Du mit der "vollen" Pixel-Clock die Pixel in den Fifo übertragen (hast also eine Art Referenz) und von dort "gemütlich" auslesen, da diese ja bis zum vollständigen Auslesen gehalten werden. Wenn ich keine Umrechnungen (RAW Bayer ...) machen wollte und eine Kamera mit Fifo hätte würde ich auch QVGA (im Kamera-DSP umgerechnet) nutzen, um das Bild auf einem Display oder am PC darzustellen. Die passenden Register-Einstellungen sind schon x-Mal veröffentlicht worden - wenn Du ein Bild haben willst - einfach kopieren. Der "Implementation-" oder "Programming-" Guide sind nur rudimentär und (aus meiner Sicht) nicht vollständig. Genug "gelabert" - schönes Wochenende Dieter
David D. schrieb: > Ich denke eines meiner "Probleme ist wahrscheinlich, dass ich zwischen > den einzelnen Zeilen pausiere um Rückmeldung vom Terminal zu geben, dass > die Zeile angekommen ist. damit unterbreche ich RCK für 10,3ms... > vielleicht rührt es daher und ich sollte mein Konzept nochmal überdenken > und vlt. doch den ganzen Frame übertragen... Du hast "alle Zeit der Welt" den Fifo auszulesen (nach meinem Verständnis). Nur musst Du die Kamera so konfigurieren, dass diese den Fifo zuverlässig füllt (und das VSYNC-Signal auswerten, damit Du nicht voreilig ausliest).
Angehängte Dateien:
-

Test51.bmp
49 KB
So hatte ich mir das auch vorgestellt... Aber laut Datenblatt des Fifos muss man RCK ebenfalls mit 1MHZ betreiben. Und da ich keinen Zugriff auf das ReadEnable habe, macht das die ganze Sache kompliziert. Habe jetzt mal ein neues Feautre zum Terminal hinzugefügt, dass den ganzen Frame auf einmal empfängt und siehe da: zumindest die "toten" Bereiche sind verschwunden. Das Bild hat 313x240 Pixel. Ist es ein Problem mit der AUflösung oder mit dem Speicher auslesen? EDIT: RCK habe ich jetzt auf 48kHZ und somit immernoch weit unter der Spec... Aber ich weiß nicht wo ich das noch rauskitzeln soll
David D. schrieb: > Das Bild hat 313x240 Pixel. > > Ist es ein Problem mit der AUflösung oder mit dem Speicher auslesen? Zeig doch bitte Dein aktuelles Programm. Die PC-Seite "ist geheim" - aber dann können wir (Michael und Andreas - ich nur theoretisch) zumindest an der AVR-Seite mal schauen ...
Siehe den Post von kurz nach 17 Uhr, im Link findest du sowohl das "geheime" ;-) Programm (auch den Sourcecode und ebenfalls den Sourcecode vom uC. Hast du Probleme mom Link? Dann Versuch ich's nochmal
Hi Leutis, habe dummerweise aktuell nicht viel Zeit, daher hier nur ganz kurz: - Habe meinen Pseudocode von weiter oben mehr oder weniger 1:1 auch in Code umgesetzt (der Dich aktuell aber mehr verwirren als beflügeln würde - ich muss ihn erst aufräumen, bevor ich ihn hier einstellen kann). - Den AL422B lese ich mit 10kHz aus (also weit unter der Spec). Der PCLK-Takt aus der Kamera läuft die ganze Zeit durch - ich hoffe mal, der reicht für das DRAM-Refresh. - Ich sammle jeweils 2 Bytes aus dem FiFo und sende die als RGB565-Doppelbyte zu meinem LCD-Display (die entsprechende Funktion des LCD's spricht nämlich ebenfalls RGB565.) Ich warte also explizit nicht auf das Zeilenende, bevor ich die Daten in Richtung LCD versende. Mehr "Magic" ist nicht dabei. Viele Grüße Andreas
Hallo, David D. schrieb: > EDIT: RCK habe ich jetzt auf 48kHZ und somit immernoch weit unter der > Spec... Aber ich weiß nicht wo ich das noch rauskitzeln soll ich habe mal testweise 50ms delay nach jeder Zeile bei mir eingefügt, stört in keiner Weise, Bild wird sauber aus dem FiFo gelesen. Ich habe mal versucht, durch Dein Programm durchzuschauen, aber bis jetzt nur kurz. Verwirrung: warum finde ich Registerdefinitonen wie
1 | #define OV_SCCB_COM14 0x3E |
in der SCCB_old.h, bei mir würden die zur OV7670_with_Fifo.h gehören. SCCB wäre bei mir init(), readByte(adr,wert) und writeByte(adr,Wert). Wenn ich z.B. die OV7670_with_Fifo.h durch eine OV2740.h ersetzen wollte, will ich nicht in zig Dateien nach zu Ändernden Registernamen suchen müssen. SCCB bliebe ja SCCB. Mir ist auch etwas unklar, warum man die Datenpins der Kamera auf 2x 4Bit von 2 Ports durchuas sinnvoll aufteilet und das dann mit Funktionen, die Funktionen aufrufen, einzeln zusammenbastelt. Das ginge in einer Zeile mit
1 | UDR0 = (PIN_LOW & MASK_LOW) | (PIN_HIGH & MASK_HIGH); // Byte (Y) einlesen und rausschicken |
Dazu denn eben
1 | #define PIN_HREF PB0 // (D8) IN H-aktiv OV7670 Zeilenstart mit H-Impuls |
2 | #define PIN_VSYNC PD3 // (D3) IN H-aktiv OV7670 Bildstart mit H-Impuls |
3 | #define PIN_WRST PD2 // (D2) OUT L-aktiv AL422B Write-Counterreset mit L-Impuls |
4 | |
5 | #define PIN_STR PB1 // (D9) IN H-aktiv OV7670 Blitzlichtsteuerung |
6 | #define PIN_RCK PB2 // (D10) OUT H-aktiv AL422B default L |
7 | #define PIN_RRST PB3 // (D11) OUT L-aktiv AL422B Read-Counterreset mit L-Impuls |
8 | #define PIN_WR PB4 // (D12) OUT H-aktiv AL422B verknüpft mit HREF OV7670 zu /WR AL422B |
9 | #define PIN_OE PB5 // (D13) OUT L-aktiv AL422B Output tristate/aktiv, kann hier wohl auf L bleiben |
10 | |
11 | #define PIN_LOW PINC |
12 | #define MASK_LOW 0x0F // (A0...A3) PC0...PC3 IN |
13 | |
14 | #define PIN_HIGH PIND |
15 | #define MASK_HIGH 0xF0 // (D4...D7) PD4...PD7 IN |
Das komplette Init der Kamera-IO dann
1 | DDRB &= ~((1 << PIN_HREF) | (1 << PIN_STR)); // IN |
2 | |
3 | PORTB &= ~((1 << PIN_WR) | (1 << PIN_OE) | (1 << PIN_RCK)); // Low |
4 | PORTB |= (1 << PIN_RRST); // HIGH |
5 | DDRB |= (1 << PIN_RCK) | (1 << PIN_RRST) | (1 << PIN_WR) | (1 << PIN_OE); // OUT |
6 | |
7 | DDRD &= ~(1 << PIN_VSYNC); // IN |
8 | PORTD |= (1 << PIN_WRST); // HIGH |
9 | DDRD |= (1 << PIN_WRST); // OUT |
10 | |
11 | DDRC &= ~MASK_LOW; // D0-D3 camera IN |
12 | DDRD &= ~MASK_HIGH; // D7-D4 camera IN |
Ich weiß, daß das Herangehen da ewige Diskussionen auslösen kann, es stellt also nur meine Vorstellung und Meinung dar. Wenn die Pin-Zuordnungen (für mich) schnell auffindbar gewesen wären, hätte ich den Kram vermutlich noch schnell an mein PinOut des AVR angepasst und mal geflasht. So werde ich mich erstmal durchkramen müssen um mehr zu verstehen. So, genug gemault... ;-) @Andres S. schrieb: > Ich warte also explizit nicht auf das Zeilenende, bevor ich die > Daten in Richtung LCD versende. Ich warte auch auf nichts, die Geschwindigkeit wird nur von der UART-Rate bestimmt, sind hier RCLK im Moment 22,4kHz, eben 230400 Baud, passt ja auch ganz gut. Mit 115200 ist es aber genauso stabil, dann eben bei gut 11kHz RCLK. Gruß aus Berlin Michael
Danke, dass du dir das antust. Da ist Maulen dann auch erlaubt :D Den case 0 brauchst du dir erst gar nicht anschauen. Der wird eh nie aufgerufen :D.... ansonsten sind in der main() die möglichen Befehle in dem Switch case Statement. Die Befehle selbst sind in der ov7670 With Fifo. Die sccb_old verwirrt zwar wegen dem Namen, aber ist die richtige und funktioniert auch recht zuverlässig. Bin grade leider nur mobil drin, kannst könnte ich dir schon mehr Infos geben
David D. schrieb: > Siehe den Post von kurz nach 17 Uhr, im Link findest du Ja - bin ein Blindfisch :-( Was mir auffällt:
1 | volatile int height = 480; |
2 | volatile int width = 640; |
3 | volatile int BytesPerPixel = 3; |
Passt das zu dem, was Du einlesen willst? Würde bedeuten, dass Du RAW Bayer (height / width) einlesen möchtest. Da kommt aber nur 1 Byte pro Pixel und nicht 3 (ob die Register-Werte dazu passen habe ich nicht geprüft). 3 Byte pro Pixel kann die Kamera gar nicht - die passen auch nicht in den Fifo bei der gewählten Auflösung, so weit mir bekannt. Damit wird nichts vernünftiges herauskommen. Das
1 | //Reset the Write Pointer, (not sure, if that will work) |
2 | OV7670_ResetFifoWritePointer(); |
gehört nicht ans Ende von "OV7670_captureNewImage" - keine Ahnung, ob es stört. VG Dieter
Hallo, David D. schrieb: > Danke, dass du dir das antust. Da ist Maulen dann auch erlaubt :D ok, wenn Du es so siehst machen wir mal weiter. :-) Den Kram zuzuodnen ist nicht so das Problem, ich hatte erst gestern Aben nur schnell das PinOut der Cam prüfen wollen und an meins anpassen. Die steckt ja jetzt so schon auf dem Adapterboard, von dem Andreas so "begeistert" war. ;) SCCB passt, da bist Du ja auch an den I2C-Pins. D7...D4 passen, D3...D0 hast Du an PortB, ich an PortA, muß ich anpassen. VSYNC Du auf C4, ich auf D3, HREF Du auf C0, ich auf B0, RST Du auf B5, habe ich fest auf H, muß ich auf einen unbenutzten Pin mappen. PDWN haben wir beide nicht beschaltet, ok. STR Du nicht beschaltet, ich dummerweise ja, hatte erst später geschaur, wofür der ist, muß ich also in Deinem Source noch auf L schalten, kein Problem. RCK Du auf D2, ich auf B2, WR Du auf B4, ich auf B4, OE Du nicht beschaltet, ich auf B5, also auch noch auf L setzen WRST Du auf C3, ich auf D2, RRST Du auf C2, ich auf B3. Werde ich nachher in Deinem Source mal anpassen, der LA hängt sowieso noch dran, sehe ich ja zur Not, wenn ich wo falsch bin. Compiler lief ja schon durch, ein paar Warnungen, denen ich aber nur nachgehe, wenn es da klemmt bzw. der Rest passt: SCCB_Old.c:330:40: warning: passing argument 2 of 'OV7670_read' discards 'volatile' qualifier from pointer target type [-Wdiscarded-qualifiers] if(ErrorCode=OV7670_read(OV_SCCB_COM14,&temp)) SCCB_Old.c:161:7: note: expected 'char *' but argument is of type 'volatile char *' char OV7670_read (char regID, char* regData) SCCB_Old.c:339:39: warning: passing argument 2 of 'OV7670_read' discards 'volatile' qualifier from pointer target type [-Wdiscarded-qualifiers] if(ErrorCode=OV7670_read(OV_SCCB_COM7,&temp)) Ich werde nachher mal anpassen und mich überraschen lassen. ;-) Gruß aus Berlin Michael
Dieter F. schrieb: >
1 | > volatile int height = 480; |
2 | > volatile int width = 640; |
3 | > volatile int BytesPerPixel = 3; |
4 | > |
Die werden vom Terminal mit einem Klick auf get Camera Status auf die aktuellen Einstellungen angepasst. > Passt das zu dem, was Du einlesen willst? Würde bedeuten, dass Du RAW > Bayer (height / width) einlesen möchtest. Da kommt aber nur 1 Byte pro > Pixel und nicht 3 (ob die Register-Werte dazu passen habe ich nicht > geprüft). Im Processed BayerRaw kommt nur eins an? Da hätte ich drei gedacht. > 3 Byte pro Pixel kann die Kamera gar nicht - die passen auch nicht in > den Fifo bei der gewählten Auflösung, so weit mir bekannt. Damit wird > nichts vernünftiges herauskommen. Im QCiF auch nicht? > Das > >
1 | > //Reset the Write Pointer, (not sure, if that will work) |
2 | > OV7670_ResetFifoWritePointer(); |
3 | > |
> > gehört nicht ans Ende von "OV7670_captureNewImage" - keine Ahnung, ob es > stört. Richtig, ich hatte nur irgendwo gelesen, dass der write pointer immer x Positionen vor dem read Pointer sein muss und dass ein reset das umgehen würde... Kann mich aber auch irren. Werde ich nochmal prüfen
David D. schrieb: > Im QCiF auch nicht? Nein: Application Note Punkt 2 - Tabelle (achte auf die "or") Dann 2.1 erster Absatz: RAW Bayer nur bei VGA, Processed Bayer für VGA und QVGA. Alle anderen Ausgabe-Formate gelten für VGA und alle Auflösungen kleiner CIF. Kein Ausgabe-Format hat 3 Byte für die Farb-Information. Hier ist es schön dargestellt: http://joe-c.de/pages/optik/kamerasensor.php
Beitrag #5730463 wurde von einem Moderator gelöscht.
Hallo David, David D. schrieb am 09.02.2019 17:19: > @Igel kannst du vielleicht nochmal deine aktuelle Write und > Read sequenz einstellen? Ich würde die gerne abgleichen. Ich habe den wichtigen Part aus meinen Code, nämlich das Auslesen des OV7670->FiFo und das Auslesen FiFo->LCD-Display, hier angehängt. Das ganze habe ich mit vielen Kommentaren gespickt. Der für Dich relevante Teil startet ab: "// The interesting part starts here" Als Register-Settings benutze ich die Colorbar-Einstellungen aus meinem letzten Posting hier: Beitrag "Re: Brauche Unterstützung beim OV7670 (bzw. SCCB)" Eine Zeile hat - wie oben geschrieben - 313 Pixel. Viele Grüße Igel1
Angehängte Dateien:
-

CAM-LA-Davids.jpg
140 KB -

CAM-LA-meins.jpg
150 KB
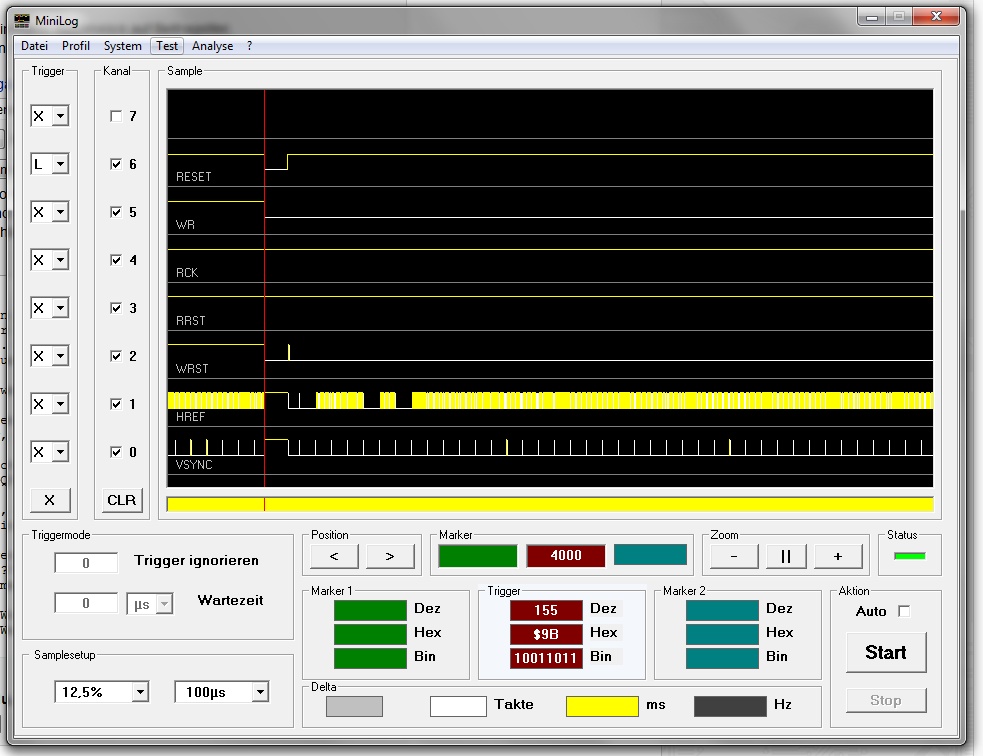
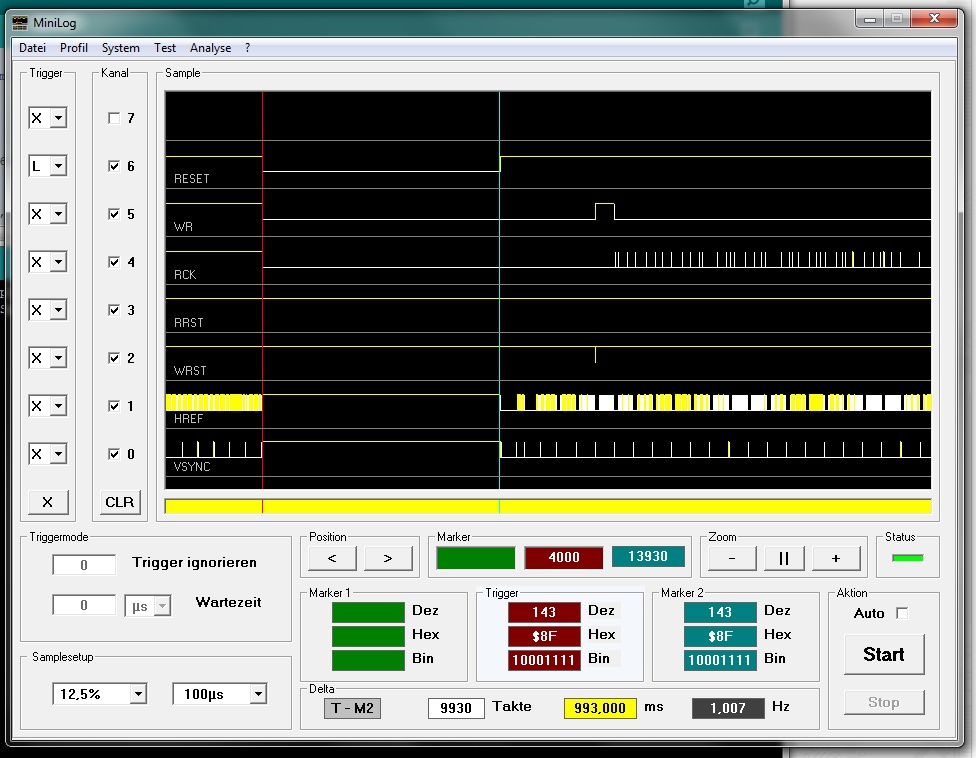
Hallo, so, ich habe mal alles für David passend gemacht, meinen High-End-Adapter etwas umgebaut: RST zum AVR verdrahtet, ein Pegelwandler war ja noch frei OE direkt auf GND STB offen, ist ja sowieso nur ein OUT der Cam, der jetzt nicht gebraucht wird. Compiliert, geflasht, soweit ok. Terminalprogramm geht auch, Baudrate bin ich auf meine 230400 gegangen. Init geht, Status holen geht, Register lesen geht. Register schreiben ändert den Registerwert nicht, da muß ich noch nachschauen, Blid holen bleibt so natürlich auch hängen. Ich habe mal die Startsequenzen imLA verglichen, bei mir startet ja Einlesen automatisch, ist das kurze L bei WRST nach der Mitte. Ab da wird auch gelesen, der H-Impuls bei WR, und übertragen, die H-Impulse bei RCK. Ich habe die Auflösung extra so gelassen, weil ich den kompletten Ablauf nach Reset sehen wollte. PS: bediene ich Dein Terminal falsch oder stellt Du wirklich im Read Settings die Werte als HEX und im Write Settings als DEZ dar? Falls ja: geht's noch? Soll ich mir zum Vergleichen da einen Taschenrechner daneben legen? Falls mein Fehler bitte ein Hinweis. ok, Register schreiben scheint jetzt zu gehen. Hast Du die volatile im Lotto gewonnen? //Initial Variables volatile int Programstatus = -1; volatile int height = 480; volatile int width = 640; volatile int BytesPerPixel = 3; volatile char Byte=0; warning: invalid conversion from 'volatile int*' to 'int*' [-fpermissive] UART0_rx_work(&Programstatus); ich habe die volatile da erstmal alle rausgeworfen, ich habe auf Anhieb keinen Sinn dafür gefunden? Gruß aus Berlin Michael
@David: Oh ha - jetzt gibt's kein Entrinnen mehr: Michael hat Deinen Code in der Mangel ... @Michael: Nachdem Dieter bei David das Missverständnis "Ein Pixel hat 3 Byte" aufgeklärt hat, sollte David jetzt eigentlich das Ziel aus eigener Kraft erreichen können. Auch wenn es Dir in den Fingern juckt - ich würde David die Chance geben, sein Programm selbst ans Laufen zu bringen. Viele Grüße Igel1
Hallo zusammen, @Dieter >Kein Ausgabe-Format hat 3 Byte für die Farb-Information. Siehe Tabelle 2-1 im application guide: Processed Bayer RGB sehe ich da schon als 3Byte pro Pixel nämlich jeweils eins für R eins für G und eins für B. Vielleicht vertue ich mich aber auch und es ist stattdessen nur 1 pro pixel und ich bekomme trotzdem wieder nur die jeweilige Farbinformation wie beim normalen RAW Bayer. Die Auflösung zum "Processed Bayer RGB" hat dein Link ja leider nicht entschlüsseln können. @Igel >Ich habe den wichtigen Part aus meinen Code, nämlich das Auslesen des >OV7670->FiFo und das Auslesen FiFo->LCD-Display, hier angehängt. Danke! werde ich mir nachher direkt anschauen @Michael >PS: bediene ich Dein Terminal falsch oder stellt Du wirklich im Read >Settings die Werte als HEX und im Write Settings als DEZ dar? nein alles HEX, nur das 0x fehlt noch beim Read.(das mit dem Write habe ich gestern erst implementiert und das mit eingebaut). mehrere Register können übrigens geschrieben werden indem eine Textdatei geladen wird. Format in der Textdatei: Pro Zeile ein Register: Adresse;Value;ggf Kommentar Beispiel:
1 | 0x12;0x0D |
2 | 0x13;0xC1;Hier könnte jetzt ein Kommentar stehen |
3 | ... |
dann steht es in der rechten Box. dann auf write Device Settings gehen und hoffen, dass alle Register ohne Fehler geschrieben wird. (mit Read All Register kann gesehen werden, was die einzelnen Register im uController enthalten.(Auch hier hoffen, dass alles durchläuft. Den Fehler warum es manchmal-scheinbar zufällig- abbricht habe ich leider noch nicht gefunden.) mit get Camera status dann die Auflösung (die ganzen volatile values) anpassen. Volatile deshalb, weil ich mir gedacht habe, dass der compiler sie evtl. wegoptimiert, weil sie ja evtl. aus seiner Sicht nicht gebraucht werden. @Igel >Nachdem Dieter bei David das Missverständnis "Ein Pixel hat 3 Byte" >aufgeklärt hat, sollte David jetzt eigentlich das Ziel aus eigener >Kraft erreichen können. Leider nein... Weil sich dieses "Missverständnis" auf das RAW Format bezieht wir aber ja im QVGA und RGB565 unterwegs sind. Und ich da die gleichen "Probleme" habe. >Auch wenn es Dir in den Fingern juckt - ich würde David die Chance >geben, sein Programm selbst ans Laufen zu bringen. Ich möchte kein fertiges Programm vor die Füße gesetzt bekommen, sondern wissen was ich falsch mache. Daher möchte ich Michael nur ermutigen weiterhin meinen Code unter die Mangel zu nehmen und berechtigte Kritik zu äußern oder das Vorgehen zu hinterfragen. Nur so weiß ich, was ich ggf. auch falsch mache in meinem "Programmierstil" :D... Aktuell komme ich ohne fremde Hilfe leider nicht weiter, weil ich nicht weiß wo ich ansetzen soll. Also Michael: Zerfetz meinen Code :D. Zum Terminal kann ich gerne auch noch weitere Fragen beantworten oder Vorschläge in die Bedienung mit einfließen lassen. Ich gebe zu es ist nicht ganz Intuitiv... sondern ebenfalls Historisch gewachsen. ABER ein beliebiges Farbbild zu übertragen (auch im RGB565) funktioniert. Es liegt also mehr auf uController Seite und nicht am Terminal. Ich danke euch für euren hoffentlich weiterhin konstruktiven (oder von Michael destruktiven :D) input. Danke Gruß David
Hallo, Andreas S. schrieb: > Auch wenn es Dir in den Fingern juckt - ich würde David die Chance > geben, sein Programm selbst ans Laufen zu bringen. das Jucken beschränkt sich so ziemlich nur darauf, seinen Code hier zum Laufen zu bekommen. Zur Kamera selbst habe ich eigentlich garnichts vor, schon deshalb nicht, weil ich sie nicht nutzen will. Sie war halt nur da und der Mega328 auch und den, das behaupte ich einfach mal, ganz gut kenne. Gruß aus Berlin Michael
David D. schrieb: > Processed Bayer RGB sehe ich da > schon als 3Byte pro Pixel nämlich jeweils eins für R eins für G und eins > für B. Vielleicht vertue ich mich aber auch und es ist stattdessen nur 1 > pro pixel Ja, Du vertust Dich - hast Du Dir mal den Link angeschaut? Processed Bayer wird sich lediglich auf die Optionen (Schärfe, etc.) auswirken. Muss man halt prüfen. Aber auch da gibt es nur ein Byte Farbinformationen pro Pixel (Verteilung höchstwahrscheinlich analog RAW Bayer, nur "nachgeschärft etc.) - aus meiner Sicht SICHER. Die Kamera gibt NIEMALS 3 Byte pro Pixel aus. Nochmal - beachte die "or"-Angabe.
Dieter F. schrieb: > Ja, Du vertust Dich - hast Du Dir mal den Link angeschaut? Processed > Bayer wird sich lediglich auf die Optionen (Schärfe, etc.) auswirken. Habe ich, aber da finde ich jetzt nichts, was auf das Schärfen eingeht. > Die Kamera gibt NIEMALS 3 Byte pro Pixel aus. Nochmal - beachte die > "or"-Angabe. Ja ok, überzeugt ;-) hatte das "or" falsch interpretiert. Aber stimme jetzt mit dir überein. ein "or" steht dann also für das nächste Pixel steht dann auch im Einklang mit den übrigen Farbformaten. Thumb Up @Michael >das Jucken beschränkt sich so ziemlich nur darauf, seinen Code hier zum >Laufen zu bekommen. Das wäre klasse... Es ist meiner erstes "wirkliches" Projekt mit dem Ding...
David D. schrieb: > Habe ich, aber da finde ich jetzt nichts, was auf das Schärfen eingeht. AEC, AGC, ABLC, white balance control, gamma control, SHARPNESS CONTROL (5.4) - keine Ahnung, was auch immer da berücksichtigt wird. Deswegen weigere ich mich ja, irgendwelche Einstellungen blind abzutippen.
Hallo, David D. schrieb: > @Michael >>PS: bediene ich Dein Terminal falsch oder stellt Du wirklich im Read >>Settings die Werte als HEX und im Write Settings als DEZ dar? > nein alles HEX, nur das 0x fehlt noch beim Read.(das mit dem Write habe > ich gestern erst implementiert und das mit eingebaut). ich habe hier Deine v0.3 von github am Laufen und da sieht die geschriebene u.ä. Datei so aus: 112;58 113;53 und das ist kein HEX. Falls das überholt ist, leg mal die aktuelle hin. David D. schrieb: > Ich danke euch für euren hoffentlich weiterhin konstruktiven (oder von > Michael destruktiven :D) input. ich habe mir jetzt mal meinen freien Pin als Debug-Output gesetzt. Dein _delay_ms(5); in der while81) auskommentiert, am Anfang von while das Pin auf H und am Ende auf L geetzt. Weiß jetzt auch nicht, warum er da warten sollte. Die zykluszeit der while81) ist 2,55µs, ok, Dein switch() wird also sauber durchlaufen. Dein Fifo-Konstrukt muß ich mir erst ansehen, mir gefallen Funktionsaufrufe in einer ISR ohnehin nicht sonderlich. Speziell weil Du da UART0_rx_in(UDR0); für das Fifo-Handling aufrufst, Deinen Rückgabewert von int UART0_rx_in (char input) aber völlig ignorierst. Wer behandelt dann wie return 0; bei Fifo voll? Ich vermute mal, da bleibt er auch irgendwo hängen. PS: ich stochere ja öfter in fremden Code rum, schon um Anleihen zu tätigen. ;-) Alles, was Du da Richtung IO hast, ist ja AVR-spezifisch, für mich gibt es da keinen Grund, Portzugriffe usw. um 3 Ecken zu machen. Wenn es einen HAL gäbe wie z.B. auch in der AdrduinoIDE, wo eben ein pinMode(6,OUTPUT); den von den Erstellern als Pin 6 bezeichneten Pin auf OUT setzt, egal, ob AVR, SAM, STM, ESP usw., dann macht das wieder Sinn, dann kann ich komplett ignorieren, wie das erreicht wird, ob da ein DDR-Register beim AVR, ein halbes Dutzend bei anderen µC oder noch eine IO-Matrix bedient werden muß. Hat eben den Preis, daß ein pinMode(6,OUTPUT); wesentlich länger braucht als ein DDRB |= (1 << PB6); Gruß aus Berlin Michael Gruß aus Berlin Michael
Michael U. schrieb: > ich habe hier Deine v0.3 von github am Laufen und da sieht die > geschriebene u.ä. Datei so aus: > 112;58 > 113;53 > und das ist kein HEX. Falls das überholt ist, leg mal die aktuelle hin. richtig... in die Datei wurden Dezimal zahlen geschrieben... war ein Fehler, anbei die 0.4 Version in der der Fehler behoben wurde (und auch noch andere Sachen verbessert und Altlasten entfernt: https://github.com/igittigitt/ov7670/tree/TWI-Interfac/OV7670-Terminal-Releases > Speziell weil Du da UART0_rx_in(UDR0); für das Fifo-Handling aufrufst, > Deinen Rückgabewert von int UART0_rx_in (char input) aber völlig > ignorierst. > Wer behandelt dann wie return 0; bei Fifo voll? niemand... dann läuft es einfach ins Leere... ich weiß aber leider nicht wie ich es besser machen soll :/ Ich gebe zu, dass es, wenn die Datenpins auf einem Address Byte liegen es sicher einfach wäre die auszulesen, aber so habe ich mir die Flexibilität beibehalten, die Kamera auf einen beliebig anderen AVR anzuschließen, indem ich vlt. nicht noch zusammenhängende Ports frei habe. Auch wenn ich das im aktuellen Fall nicht brauche. Gute Nacht und bis Morgen Gruß David
Hallo, David D. schrieb: > richtig... in die Datei wurden Dezimal zahlen geschrieben... war ein > Fehler, anbei die 0.4 Version in der der Fehler behoben wurde (und auch > noch andere Sachen verbessert und Altlasten entfernt: Danke, gefällt mir so viel besser. :-) Wenn Du jetzt noch unterschiedliche Registerwerte ind den beiden Fenster farblich makieren würdest... ;-) Und wenn Du die Datei im Format einer Struktur, also z.B. { 0x7a, 0x24 }, { 0x7b, 0x04 }, { 0x7c, 0x07 }, dann könnte ich das soger direkt aus der Datei in meinen AVR_Source kopieren... Duck und schnell ganz weit weg.... ;-) David D. schrieb: > Ich gebe zu, dass es, wenn die Datenpins auf einem Address Byte liegen > es sicher einfach wäre die auszulesen, aber so habe ich mir die > Flexibilität beibehalten, die Kamera auf einen beliebig anderen AVR > anzuschließen, indem ich vlt. nicht noch zusammenhängende Ports frei > habe. Auch wenn ich das im aktuellen Fall nicht brauche. Deine Intension ist mir schon klar. Meine Meinung hatte ich ja schon am Anfang geschreiben: eine OV7670 an einem AVR (egal welchen) ist eine Spielerei und für mich nur der Spaß daran, ob es geht. Ich könnte an mein Konstrukt durchaus noch einen ENC28J60 ranstricken und den alten Webserver da reinknoten. Ein BMP-Header voran und das Bild im Browser anzeigen. Macht für mich aber keinen Sinn. Auf einem ESP32 kann ich die Daten per I2S-DMA parallel "nebenbei" holen und die IOs auf fast alle IOs mappen ohne irgendwelche Nachteile. Auch ohne Fifo. Da diskutiere ich aber lieber mit der OV2640 rum, etwas bessere Auflösung und wahlweise gleich JPEG. David D. schrieb: >> Wer behandelt dann wie return 0; bei Fifo voll? > niemand... dann läuft es einfach ins Leere... ich weiß aber leider nicht > wie ich es besser machen soll :/ Wenn der FiFo voll ist, findet Dein UART0_rx_complete nie die gesuchten zeichen am Ende und niemand räumt den Fifio je wieder auf. Ein fifo_full-Flag aus der ISR oder UART0_rx_in durchreichen und in der while(1) in main rigiros den Buffer aufräumen um wieder einen definierten Status zu bekommen? Schönen Tag noch. Gruß aus Berlin Michael
Hi Leute, Uli S. hatte offenbar unseren Thread übersehen (oder für nicht passend erachtet) und eine Frage zum SCCB-Protokoll auf einem STM32F429 hier im Forum eingestellt: Beitrag "OV7670 blockiert Bus nach senden des Registers" Michael U. hat ihn auf mich verwiesen und ich habe Uli gerade meinen SCCB-Code spendiert: Beitrag "Re: OV7670 blockiert Bus nach senden des Registers" Dies nur für den Fall, dass unser Stolberger Hardcore-AVR-Kämpfer irgendwann auf den Weg der Tugend findet und sich doch zum ARM Prozessor bekehren lässt ... Viele Grüße Igel1
Hey Mitstreiter, diese Woche ist leider ganz besonders schlimm bei mir. @Michael: >Und wenn Du die Datei im Format einer Struktur, also z.B. > { 0x7a, 0x24 }, > { 0x7b, 0x04 }, > { 0x7c, 0x07 }, mach ich dir, wenn das der Preis dafür ist, dass du dich weiter mit meinem Code auseinander setzt :) bekommst du spätestens morgen Abend. Hat jemand schonmal mein Programm auf seiner Hardware ausprobiert? nicht, dass einfach meine HW kaputt ist … (nein ich habe es noch nicht geschafft eure auf meiner auszuprobieren... schäm) Gruß David
Hallo, David D. schrieb: > diese Woche ist leider ganz besonders schlimm bei mir. kein Problem. Ich grabe das ja ohnehin nur bei Bedarf aus, ist dank meiner Adapterplatine jetzt auch kein Problem, das schnell zusammenzustecken. Ein "Spezialkabel für meinen LA werde ich mir noch löten, ist aber auch kein Aufwand. David D. schrieb: > mach ich dir, wenn das der Preis dafür ist, dass du dich weiter mit > meinem Code auseinander setzt :) bekommst du spätestens morgen Abend. Danke, keine Eile, dann kann ich Init-Sequenzen einfach mal im "meine" Software kopieren und testen. David D. schrieb: > Hat jemand schonmal mein Programm auf seiner Hardware ausprobiert? > nicht, dass einfach meine HW kaputt ist … Naja, zumindest hat Dein Terminalprogramm mit Deiner Software auf meinem AVR geredet, Registerkram ging inzwischen offenbar auch. Mit Deiner v0.4 habe ich aber noch nicht wirklich weitergetestet, mal schauen, ob ich Bilddaten bekomme ohne hängen zu bleiben. Kann aber sein, daß ich da auch erst am Wochenende wirklich zu komme. Gruß aus Berlin Michael
Hi Leute, habe gestern Nacht mein UART endlich auf meinem STM32F429 in die Gänge gebracht (ein echter Kraftakt ...). Nun könnte ich Davids PC-Bilddarstellungsprogramm einmal ausprobieren. Allerdings habe ich dazu noch zwei Fragen. Und da ich nicht unseren gesamten Thread hier nochmals durchflöhen wollte, stelle ich sie hier einfach: - In welchem (Protokoll)format sendet David die Bilddaten an sein PC-Programm? RGB565, Big-Endian? Oder läßt er gar unterschiedliche Formate zu? - In welchem (Protokoll)format sendet David Befehle von seinem PC-Programm an seinen MC? Und insbesondere: welche Bytefolge sendet David, um ein Register im OV7670 zu setzen? Bitte seht's mir nach, wenn ich mir die Fragen bei aufmerksamer Lektüre des Threads hätte selbst beantworten können. Viele Grüße Igel1
Angehängte Dateien:
-

Unbenannt.PNG
7,6 KB
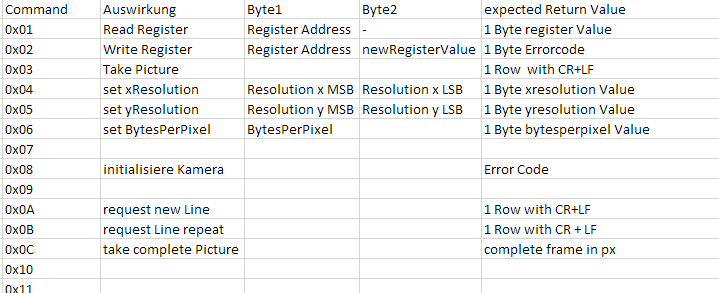
Guten Abend, >kein Problem. Ich grabe das ja ohnehin nur bei Bedarf aus, ist dank >meiner Adapterplatine jetzt auch kein Problem, das schnell >zusammenzustecken. Davon habe ich mich inspirieren lassen, weil ich eben auch nur sehr eingeschränkten Platz habe und schon immer rumgenörgelt wird, dass mein "Scheiß" den ganzen Schreibtisch blockiert :D... Das einzige was mir noch fehlt ist der 2x11 Pin header für die Kamera, dann fange ich auch das Löten an. @Igel: >- In welchem (Protokoll)format sendet David die Bilddaten an sein > PC-Programm? RGB565, Big-Endian? Oder läßt er gar unterschiedliche > Formate zu? Ja tut es, und zwar (sollte) es das automatisch tuen. Bisher implementiert sind das RGB565 format 1.Byte RRRRRGGG 2. Byte GGGBBBBB, und das YUV (wobei hier nur das Y interpretiert wird (hier sind dann auch noch abhängigkeit von der eingestellten Byte Order noch nicht implementiert, also würde ich raten auf RGB565 zu bleiben) Sowohl das Farbformat als auch die Auflösung werden über Register 0x12 erkannt und mit dem klick auf "get Camera Status" zuerst vom controller gelesen, ausgewertet und dann die Informationen xRes, yRes und BytesPerPixel an den Controller gesendet. Hier werden sie für die Ausleseroutine des FiFos benutzt. Bei einem klick auf take picture complete, wird der ganze Frame direkt gesendet (ohne abschluss zeichen) bei take picture RbyR, Zeilenweise mit jeweils einem CR+LF am ende. > In welchem (Protokoll)format sendet David Befehle von seinem > PC-Programm an seinen MC? Und insbesondere: welche Bytefolge sendet > David, um ein Register im OV7670 zu setzen? folgende Kommandos kann der uC empfangen: CommandAuswirkung Byte1 Byte2 expected Return Value 0x01 Read Register Register Address - 1 Byte register Value 0x02 Write Register Register Address newRegisterValue 1 Byte Errorcode 0x03 Take Picture 1 Row with CR+LF 0x04 set xResolution Resolution x MSB Resolution x LSB 1 Byte xresolution Value 0x05 set yResolution Resolution y MSB Resolution y LSB 1 Byte yresolution Value 0x06 set BytesPerPixel BytesPerPixel 1 Byte bytesperpixel Value 0x08 initialisiere Kamera Error Code 0x0A request new Line 1 Row with CR+LF 0x0B request Line repeat 1 Row with CR + LF 0x0C take complete Picture complete frame in px Ich hoffe, dass ist lesbar Edit: hmm wohl kaum. Ich schaue mal, dass ich vlt. noch ne Tabelle herbekommen, anbei aber schonmal ein Screenshot von der Excel Tabelle:
Hallo David, Danke für die Mühen. Leider lese ich aus Deinen Ausführungen, dass Du Dein PC-Programm und Dein MC-Programm ziemlich eng miteinander verknüpft hast. Wollte ich also Dein PC-Programm nutzen, so müsste ich auch die entsprechenden Register-Leseroutinen uns sonstigen Routinen auf meinem ARM einbauen. Machbar wäre das, aber wiederum Aufwand. Gibt es in Deinem Programm auch eine Möglichkeit, statt die Parameter vom MC auszulesen und dann das Format automatisch zu setzen, das ganze manuell im PC-Programm einzustellen? Das wäre ideal für mich (... tssss - Wünsche haben die Leute ...) Viele Grüße Igel1
Angehängte Dateien:
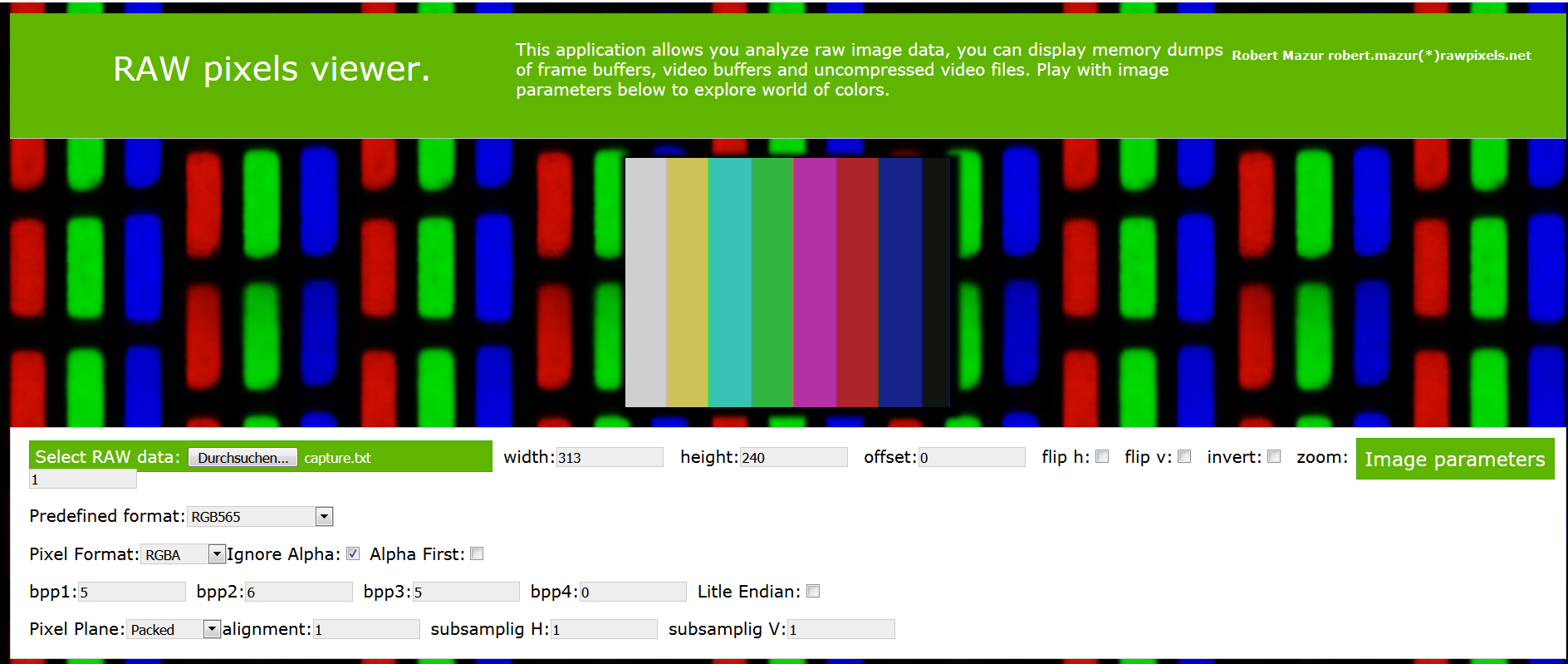
Hi, anbei mein erstes per USART übertragenes Bild. Angezeigt bei http://rawpixels.net/ Auf diese Website kann man Bilddateien unterschiedlichsten Formats hochladen und bekommt die Inhalte dann angezeigt. Echt praktisch in meinem Fall (natürlich hätte ich lieber David's Programm dafür genutzt, aber ... siehe voriger Beitrag ...) Viele Grüße Igel1
Angehängte Dateien:
-

OV7670_with_FiFo.Balli2-TestImage.20190214.PNG
380 KB -

Balli2.png
53 KB
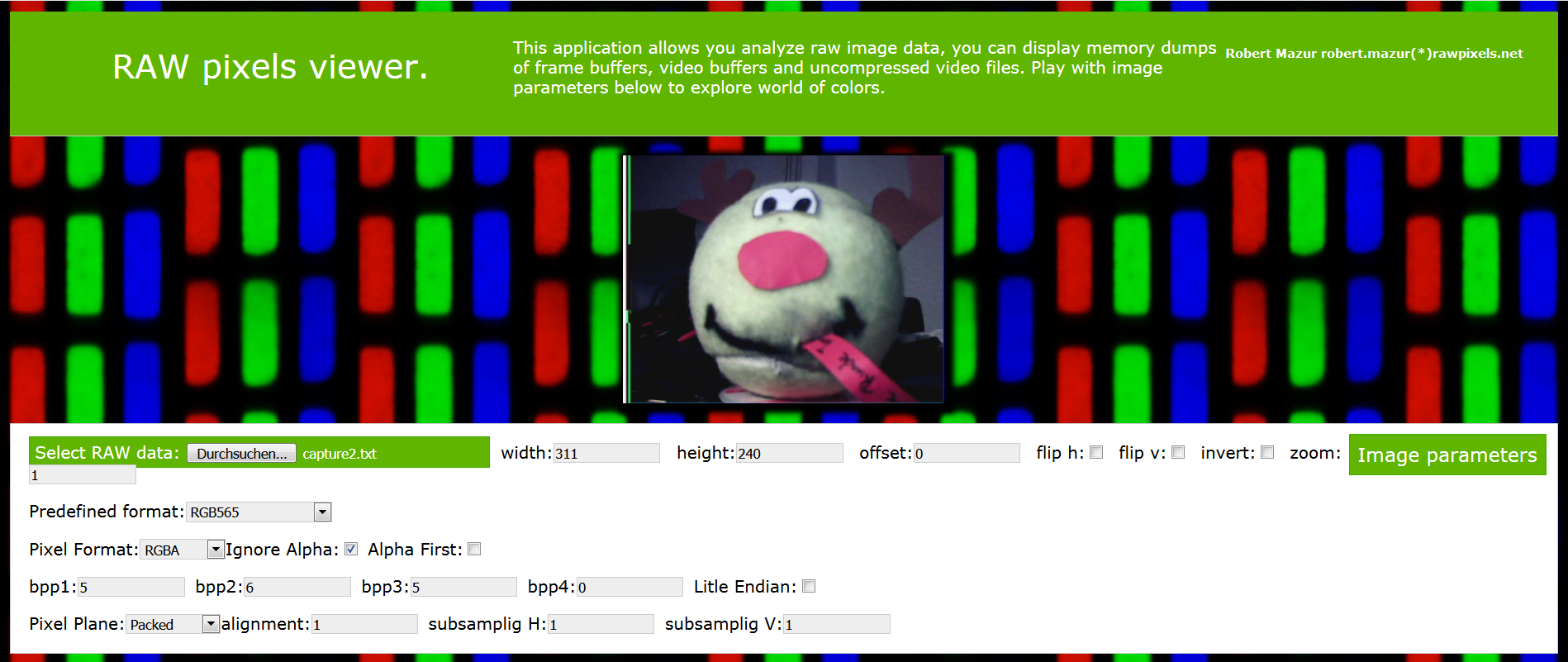
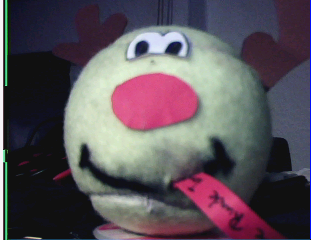
... und weil's gerade so gut läuft, hier noch ein "richtiges Bild" - ebenfalls per USART übertragen. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > ... und weil's gerade so gut läuft, hier noch ein "richtiges Bild" - > ebenfalls per USART übertragen. na geht doch. :-) Falls Du unter Windows unterwegs bist, nimm Irfanview, brauchst Du kdas Internet nicht. Soll angeblich auch unter Linux mit Wine laufen. Dann einfach laden RAW. Gruß aus Berlin Michael
Hi David, Du hast geschrieben: > Sowohl das Farbformat als auch die Auflösung werden über Register 0x12 > erkannt und mit dem klick auf "get Camera Status" zuerst vom controller > gelesen, ausgewertet und dann die Informationen xRes, yRes und > BytesPerPixel an den Controller gesendet. Hier werden sie für die > Ausleseroutine des FiFos benutzt. Habe eine Nacht darüber geschlafen, verstehe die Zs.hänge aber leider nicht richtig: Frage 1: Warum liest Du Register 0x12 aus, um daraus die Dimensionen des Bildes abzuleiten und diese dann wiederum zurück an den MC zu senden? Frage 2: Wie wir festgestellt haben, haben die Bilder, trotz ausgewähltem QVGA, teilweise nur Zeilenlängen von 311 oder 313 Pixeln. Wie berechnest Du dann aus Register 0x12 die richtige Zeilenlänge? Frage 3: Und dann verstehe ich das CR+LF am Ende der Übertragung einer Zeile nicht. Was ist Sinn und Zweck der beiden Zeichen? Frage 4: Was genau macht der Befehl 0x03 ? Frage 5: Was ist der Unterschied zwischen Befehl 0x03 und 0x0B ? Ich gebe zu: ich könnte sicherlich auch alles mit Fleiß und Ausdauer aus Deinem Code ableiten, aber dazu bin ich ein bisschen zu bequem ... Viele Grüße Igel1
Angehängte Dateien:
Hi David, habe soeben Dein "OV7670-Terminal_V0.4.zip" heruntergeladen und ausprobiert. Ich muss gestehen, dass ich einiges darin nicht verstehe. Bitte sei trotzdem nicht frustriert: ich hatte auch kein 100%ig selbsterklärendes Programm erwartet - ist ja noch alles im Fluss ... Zwei Dinge stachen mir sofort ins Auge: Issue 1: Der Rechte Rand Deines Fensters wird abgeschnitten. Intuitiv versucht man dann, das Fenster in Richtung X-Achse größer zu ziehen, aber das geht leider nicht - scheint fix zu sein. Issue 2: Ich habe versucht, in Deinem Reiter "Load Image" mein RGB565-file in Dein Programm einzuladen, um es dort anzeigen zu lassen. Leider wurde nur ein schwarzes Bild angezeigt. Dabei bin ich mir sicher, dass die Daten in dem Bild korrekt sind und formatmässig passen. Immerhin konnte ich ja dieselbe Datei auf http://rawpixels.net/ sauber als Bild anzeigen lassen. Viele Grüße Igel1
Hallo, Andreas S. schrieb: > Der Rechte Rand Deines Fensters wird abgeschnitten. Intuitiv versucht > man dann, das Fenster in Richtung X-Achse größer zu ziehen, aber das > geht leider nicht - scheint fix zu sein. kann ich hier mit der v0.4 nicht nachvollziehen unter Win7-64. Fenstergröße passt beim Start und beide Richtungen lassen sich größer/kleiner ziehen. Gruß aus Berlin Michael
>Frage 1: >Warum liest Du Register 0x12 aus, um daraus die Dimensionen des Bildes >abzuleiten und diese dann wiederum zurück an den MC zu senden? Weil über 0x12 ja die vordefinierten Auflösung oder das Farbformat definiert werden. Dann macht das Terminal eine fall unterscheidung. Wenn QVGA dann Auflösung xxx yyy 2Bytes pro pixel. Die Werte für x y und Bytes per Pixel sind hardgecoded und werden je nach Fall Unterscheidung dann an den Controller gesendet >Frage 2: >Wie wir festgestellt haben, haben die Bilder, trotz ausgewähltem QVGA, >teilweise nur Zeilenlängen von 311 oder 313 Pixeln. Wie berechnest Du >dann aus Register 0x12 die richtige Zeilenlänge? >eben genau durch diese "Hardgecodete Eben genau über das Hardgecodete... nicht schön aber für den Anfang akzeptabel >Frage 3: >Und dann verstehe ich das CR+LF am Ende der Übertragung einer Zeile >nicht. Was ist Sinn und Zweck der beiden Zeichen? hiermit überprüfe ich, ob die Zeile vollständig angekommen ist, stimmen die beiden Zeichen nicht mit den beiden erwarteten überin wird ein Line Repeat gesendet und die gleiche Zeile wird nocheinmal übertragen. Komme zu wenig zeichen an, bricht der Bildaufbau einfach ab. >Frage 4: >Was genau macht der Befehl 0x03 ? Bildaufnehmen und die erste Zeile senden. >Frage 5: >Was ist der Unterschied zwischen Befehl 0x03 und 0x0B ? 0x0B sendet nur die zuletzt gesendete Zeile nocheinmal. (Wenn vorher Zeilenweise ausgelesen wurde) 0x0C hingegen nimmt ein Bild auf und sendet den kompleeten Frame, vom ersten bis zum letzten Pixel im Bild ohne irgendwelche Steuerzeichen (CR LF etc.) also einfach pixel für pixel. >Ich gebe zu: ich könnte sicherlich auch alles mit Fleiß und Ausdauer aus >Deinem Code ableiten, aber dazu bin ich ein bisschen zu bequem ... ein Problem Andreas S. schrieb: > Ich muss gestehen, dass ich einiges darin nicht verstehe. > Bitte sei trotzdem nicht frustriert: ich hatte auch kein 100%ig > selbsterklärendes Programm erwartet - ist ja noch alles im Fluss ... Kein Problem... Ich auch nicht :D > Issue 1: > > Der Rechte Rand Deines Fensters wird abgeschnitten. Intuitiv versucht > man dann, das Fenster in Richtung X-Achse größer zu ziehen, aber das > geht leider nicht - scheint fix zu sein. Kann ich leider genau wie Michael nicht nachvollziehen bzw. reproduzieren. Welche auflösung benutzt du regulär auf deinem Bildschirm? das schaue ich mir heute Abend mal an. > Issue 2: > > Ich habe versucht, in Deinem Reiter "Load Image" mein RGB565-file in > Dein Programm einzuladen, um es dort anzeigen zu lassen. Leider wurde > nur ein schwarzes Bild angezeigt. Dabei bin ich mir sicher, dass die > Daten in dem Bild korrekt sind und formatmässig passen. Immerhin konnte > ich ja dieselbe Datei auf http://rawpixels.net/ sauber als Bild anzeigen > lassen. Da hast du dir auch genau das rasugesucht, was noch nicht funktioniert... Auch das werde ich versuchen heute Abend zu implementieren ;-)
Hi David, Danke für die Erläuterungen - jetzt blicke ich etwas besser durch die Funktionsweise Deines Programms durch. Könntest Du netterweise zu meinem vor-vorigen Posting auch noch etwas schreiben? (Beitrag "Re: Brauche Unterstützung beim OV7670 (bzw. SCCB)"). Viele Grüße Igel1
David D. schrieb: > Kann ich leider genau wie Michael nicht nachvollziehen bzw. > reproduzieren. Welche auflösung benutzt du regulär auf deinem > Bildschirm? das schaue ich mir heute Abend mal an. Hab's gerade nochmals auf einem anderen Rechner ausprobiert (Win7 x64) - lief dort ohne Probleme und auch ohne das Fenster-Clipping Problem. Fenstervergrößerung funktionierte ebenfalls. Kann Dir erst morgen die Eckdaten zu dem ersten Rechner zusenden. Viele Grüße Igel1
Hallo zusammen, anbei der neue Release mit: - der Möglichkeit ein Struct zu speichern / zu öffnen - ein Bild im RGB565 Format ohne jegliche Kommandos zu empfangen: Erwartet werden die RGB565 Bytes direct nacheinander ohne jegliches HREF oder VSYNC signal. (Falls man das auch so bei der Bildübertragung nennt) https://github.com/igittigitt/ov7670/tree/TWI-Interfac/OV7670-Terminal-Releases @Igel Bild öffnen geht leider noch nicht. Dafür müsste ich von dir noch wissen, in welchem Format du die Bilder ablegst. auch einfach eine datei mit Byte nach Byte? oder siehts dadrin was anders aus? Auch wenn ich noch nicht weiß, wie jetzt diese Änderungen des Terminals konkret bei der Lösungsfindung meines Codes hilft... :D
Hallo, David D. schrieb: > Auch wenn ich noch nicht weiß, wie jetzt diese Änderungen des Terminals > konkret bei der Lösungsfindung meines Codes hilft... :D fühle ich mich jetzt mal angesprochen. ;-) Ich will Deinen Code hier möglichst Original testen. Mit der struct-Geschichte kann ich jetzt die Registersettings einfach im meinen spielenden Code werfen und schauen, ob das passt bzw. vergleichen, was nicht passt. Oder meine settmgs in Dein Terminal und testen. Zum Bild bei mir: ich schicke den FiFo mit 320x240 Pixel, die fehlerhaften usw. sind mir erstmal eagl, gibt es am Rand eben einen fehlerhaften Streifen. Es kommt entweder RGB565 in 2 Byte so wie sie aus dem FiFo kommen, ob das big- oder little Endian ist, spielt keine Rolle. Variante 2 ist YUV nur das Y-Byte. Die akommenden Daten schreibe ich bei mir auf dem PC mit TeraTerm direkt in eine Datei test.raw. Name und Endung sind eigentlich egal, zur Anzeige nutze ich Irfanview, dem kann ich alles wichtige zum RAW-Format einstellen. Es gibt keinerlei Kennung oder Header, nur die RAW-Daten aus dem FiFo. Bei Deinem Terminal ist es gut, das ich mit den Registerwerten direkt rumspielen kann. Ob jetzt gespeichert werden kann oder es eine direkte Anzeige gibt, isr mir da eigentlich hier völlig egal. Außer 320x240 in RGB565 oder YUV als 8Bit Graustufen (Y-Byte) macht für mich eigtlich im Moment nichts Sinn. Höhere Auflösung passt nicht in den FiFo und weniger finde ich quatsch. Andere Formate als diese beiden würden ja nur Sinn machen, wenn man die Bilddaten im Zielprogramm selber weiter verarbeiten wollte oder. Alle Einstellungen zum Analogteil wie Weißabgleich, Belichtung usw. usw. bzw. zum DSP kann ich auch so durchspielen. Eine echte Verwendungsabsicht habe ich ohnehin nicht in der Kombi Mega328/OV7670. Also bleibt es letztlich nur als Test für Deine Programmierung auf dem AVR. 230400 läuft hier mit dem Ardiono UNO und em 32U4 als USB-Wandler stabil, wenn es da Übertragungsfehler geben würde, müßten die eine Ursache haben, der ich nachgehen würde. Warum der Nano mit dem CH340 auch 1MBit usw. stabil macht und der 32U4 nicht, habe ich keine Lust zu ergründen... Gruß aus Berlin Michael
Angehängte Dateien:
-

Uhr_64x32.jpg
150 KB
Hallo, Völlig OT: mit diesem 64x32 RGB-Display habe ich mir im Moment die Zeit vertrieben... Hatte mein BEkannter gekauft und nach eiern Woche das Handtuch geworfen (das will was heißen!) und es mir in die Hand gedrückt. Nach einer knappen Woche war ich am gleichen Punkt: nichts geht, wentweder ein paar sinnlos leuchtende Striche oder Flächen oder schwarzes Display. Der Zufall hat mich vorgestern einen Thread dazu finden laasen. Das Display spielt bei keinem wirklich, Stromquellen-Schieberegister für die Zeilen und Decoer/MosFET-IC für die Spalten. Beides China, chinesiche Datenblätter in denen alles wichtige nicht drinsteht... Da es in dem Forenthread zumindest Erkenntnisse und Ansätze gabe (einer oder beide IC-tyoen sind nicht asymcron-statisch wie es die Datenblätter suggereiren, sondern das Schiebereigster möchte irgendwie syncron zwischen SPI/Latch-Enable und /OE bedient werden. jetzt muß ich mir erstmal in Ruhe anschauen, was ich da genau treibe, es ist jetzt stabil, der Ablauf aber reines ändern-flashen-wundern gewesen. Die Ali-Händler bieten diese Displays mit diesem Chipset seit rund 3 Wochen auch nicht mehr an wegen dieser Probleme. So, wollte ich einfach mal loswerden. :-) PS: das Display hat 64x32 Pixel mit 3mm LED-Abstabd. Sehr schönes Teil für den Preis. Gruß aus Berlin Michael
Aber schick aussehen tut es! :D wo bekommt ihr eigentlich eure Elektrobauteile her? Bin auf der suche nach 2x11 Buchsenleisten, aber >5€ bei Reichelt nur für den Versand ist mir zu blöd...
Angehängte Dateien:
-

Absturz001.PNG
97 KB
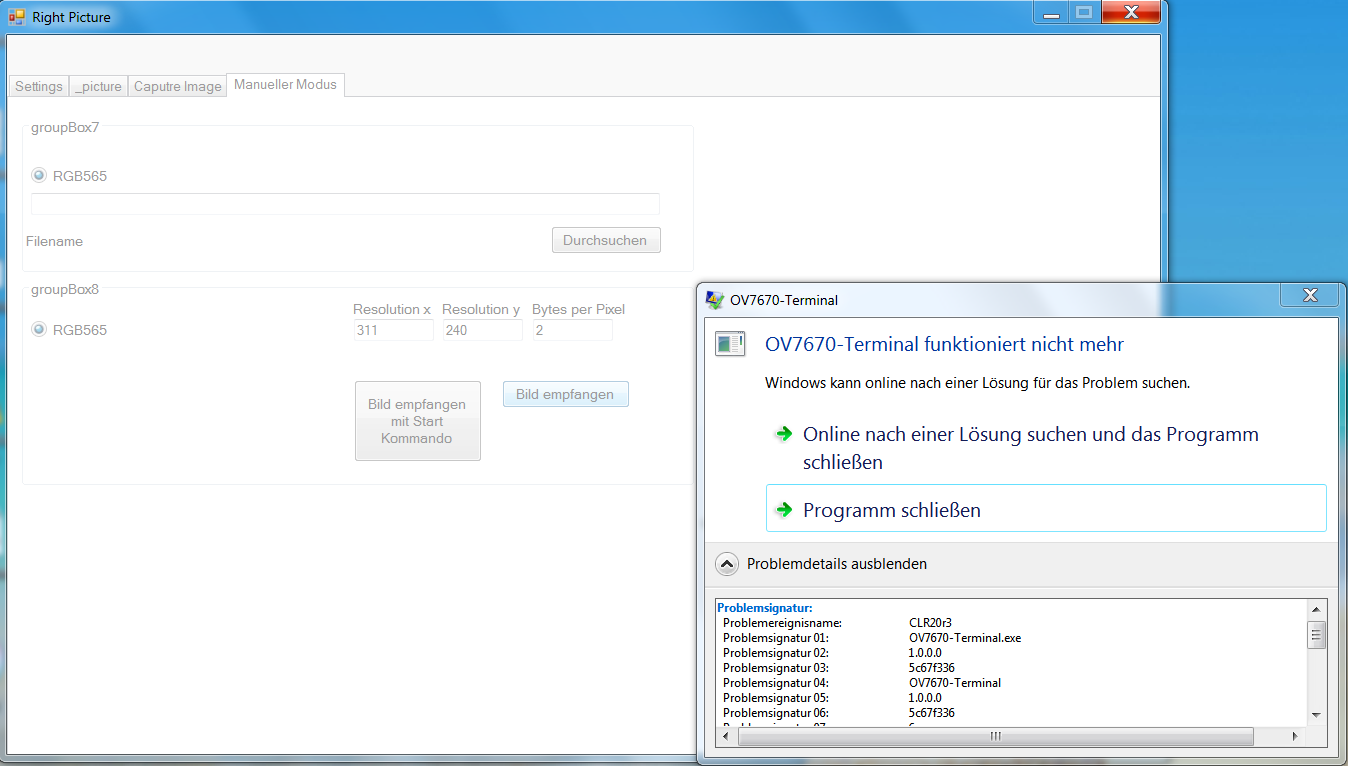
{kind=link}
{kind=link}
{kind=link}
{kind=link}
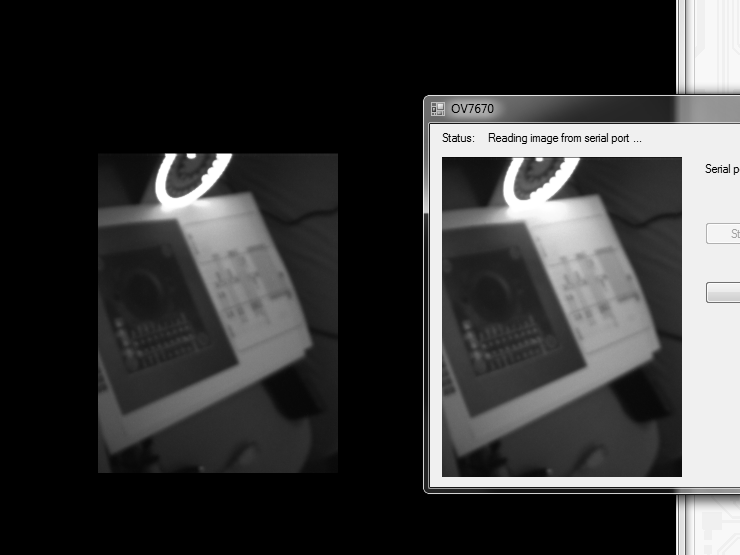{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
David D. schrieb: > Hallo zusammen, > > anbei der neue Release mit: > - der Möglichkeit ein Struct zu speichern / zu öffnen > - ein Bild im RGB565 Format ohne jegliche Kommandos zu empfangen: Juhuuuu - Weihnachten ... > Erwartet werden die RGB565 Bytes direct nacheinander ohne jegliches HREF > oder VSYNC signal. (Falls man das auch so bei der Bildübertragung nennt) Supi ... > https://github.com/igittigitt/ov7670/tree/TWI-Interfac/OV7670-Terminal-Releases ... schon gezogen ... > @Igel > Bild öffnen geht leider noch nicht. Dafür müsste ich von dir noch > wissen, in welchem Format du die Bilder ablegst. auch einfach eine datei > mit Byte nach Byte? Genau. > oder siehts dadrin was anders aus? Nö. > Auch wenn ich noch nicht weiß, wie jetzt diese Änderungen des Terminals > konkret bei der Lösungsfindung meines Codes hilft... :D Hmmm - ich würde das eher eine selbstlose Spende nennen, für die ich mich recht herzlich bedanken möchte! Leider stürzt Dein Programm im "Manuellem Modus" beim Versuch "Bild empfangen" sang und klanglos bereits nach ein paar Zeilen Übertragung (115200 baud, 8N1) ab - siehe Bild im Anhang. Fehlercodes waren:
1 | Problemsignatur: |
2 | Problemereignisname: CLR20r3 |
3 | Problemsignatur 01: OV7670-Terminal.exe |
4 | Problemsignatur 02: 1.0.0.0 |
5 | Problemsignatur 03: 5c67f336 |
6 | Problemsignatur 04: OV7670-Terminal |
7 | Problemsignatur 05: 1.0.0.0 |
8 | Problemsignatur 06: 5c67f336 |
9 | Problemsignatur 07: 6c |
10 | Problemsignatur 08: 1c |
11 | Problemsignatur 09: System.NullReferenceException |
12 | Betriebsystemversion: 6.1.7601.2.1.0.256.4 |
13 | Gebietsschema-ID: 1031 |
14 | Zusatzinformation 1: 0a9e |
15 | Zusatzinformation 2: 0a9e372d3b4ad19135b953a78882e789 |
16 | Zusatzinformation 3: 0a9e |
17 | Zusatzinformation 4: 0a9e372d3b4ad19135b953a78882e789 |
18 | |
19 | Lesen Sie unsere Datenschutzbestimmungen online: |
20 | http://go.microsoft.com/fwlink/?linkid=104288&clcid=0x0407 |
21 | |
22 | Wenn die Onlinedatenschutzbestimmungen nicht verfügbar sind, lesen Sie unsere Datenschutzbestimmungen offline: |
23 | C:\Windows\system32\de-DE\erofflps.txt |
Das Clipping-Problem existiert leider ebenfalls noch: Der rechte Rand des Programm-Windows wird abgeschnitten und das gesamte Window läßt sich nicht über die existierende Breite hinaus aufziehen - wohl aber verkleinern. Meine Auflösung: 1920 x 1200 TrueColor (32bit), Windows 7 x64. Wenn ich das Programm starte, so nimmt es von Anfang an die gesamte Bildschirmbreite ein und wird am rechten Rand abgeschnitten - wie weiter oben in einem meiner vorigen Postings gezeigt. Viele Grüße Igel1
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.