Hallo zusammen,
ich bin noch relativ unerfahren mit VHDL und versuche folgende Aufgabe
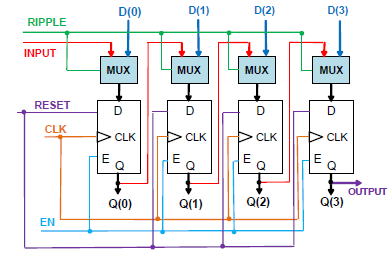
zu lösen: Ein 4-Bit Register, bestehend aus D-Flip-Flops und
Multiplexern. Im Anhang befindet sich die dazugeörige Schaltung. Die
Kopplung der Flip-Flops soll so erfolgen, dass mit jedem Takt ein
Schiebevorgang nach links ausgeführt wird. Durch das EN-Signal werden
die Flipflops freigeschaltet. Der Dateneingang ist vom Steuersignal
Ripple des Multiplexers abhängig (Input oder D). Das Ganze soll ich mit
Komponenten entwickeln, wofür ich die generate-Anweisung verwenden soll.
Die Entities sind gegeben:
1
libraryieee;
2
useieee.std_logic_1164.all;
3
entityDFFis
4
generic(P_DELAY:time:=1ns;SETUP:time:=1ns);
5
port(D,CLK,EN,RESET:instd_logic;
6
Q,Q_INV:outstd_logic);
7
endDFF;
8
9
libraryieee;
10
useieee.std_logic_1164.all;
11
entityMUX2X1is
12
generic(P_DELAY:time:=2ns);
13
port(S,E1,E2:instd_logic;
14
Y:outstd_logic);
15
endMUX2X1;
16
17
libraryieee;
18
useieee.std_logic_1164.all;
19
entityD_RIPPLE_REGis
20
generic(P_DELAY:time:=8ns;SETUP:time:=2ns;
21
SIZE:positive:=4);
22
port(D:instd_logic_vector(size-1downto0);
23
CLK,EN,RESET,RIPPLE,INPUT:instd_logic;
24
Q:outstd_logic_vector(size-1downto0);
25
Q_INV:outstd_logic_vector(size-1downto0);
26
OUTPUT:outstd_logic);
27
endD_RIPPLE_REG;
Für die Entity D_RIPPLE_REG soll ich die Architektur erstellen. Bis lang
habe ich allerdings nur sehr simple Schaltungen umgesetzt und weiß nicht
so recht wo und wie ich genau anfangen soll.
Bis lang habe ich Folgendes implementiert:
Henrik L. schrieb:> Für die Entity D_RIPPLE_REG soll ich die Architektur erstellen.
Du musst erstmal auch die anderen Komponenten mit Leben füllen.
Henrik L. schrieb:> Ich weiß nicht wie ich die Anforderungen umsetzen soll und bräuchte da> etwas Hilfe, wie man die Aufgabe am besten lösen kann.
1. DFF und MUX2X1 mit Leben füllen.
2. Innerhalb der D_RIPPLE_REG die beiden Komponenten DFF und MUX2X1 so
mit den ein und Ausgängen und zusätzlichen Signalen verbinden damit das
ein Schieberegister ist.
Warte etwas dann bereite ich dir den Code etwas anfängerfreundlich auf
...
So, hat etwas gedauert, musste das selber erst lösen. Eigentlich eine
schöne Aufgabe, aber das mit den Timings finde ich für Anfänger doch
ziemlich hart.
Hinweise:
Das mit dem Timing kannst du erstmal komplett ignorieren, das
funktioniert auch so.
Danach wenn du das Timing beachten willst, dann helfen dir:
a <= b after TIME;
a <= transport b after TIME;
SIGNALNAME'LAST_EVENT
So kannst du die Komponenten einbinden ohne sie nochmals deklarieren zu
müssen.
1
inst_MUX2X1:entitywork.MUX2X1
2
genericmap(
3
P_DELAY=>P_DELAY)
4
portmap(
5
S=>...,
6
E1=>...,
7
E2=>...,
8
Y=>...);
Ich würde zuerst eine Testbench für die einzelnen Komponenten schreiben
und die simulieren und dann erst eine Testbench für die übergeordnete
Komponente D_RIPPLE_REG.
Edit:
In der VHDL Datei soll es unten natürlich heißen
> -- Hier kommt die Beschreibung vom D_RIPPLE_REG rein.
und
> -- Hier werden verwendete Komponenten deklariert.
kannst du ignorieren wenn du die wie oben einbindest.
Und weil du schon genug zu tun hast, hier im Anhang kleine Testbenches
für DFF, MUX2X1 und D_RIPPLE_REG.
Das kannst du einfach unten an das VHDL in der einen Datei rankopieren.
Aber du kannst auch für alles eigene Dateien machen, ist egal.
Gustl B. schrieb:> Das mit dem Timing kannst du erstmal komplett ignorieren, das> funktioniert auch so.> Danach wenn du das Timing beachten willst, dann helfen dir:> a <= b after TIME;> a <= transport b after TIME;> SIGNALNAME'LAST_EVENT
Ich sehe gerade nicht, wo es bei dir geklemmt hat aber so etwas sollte
in dieser Aufgabe nicht nötig? Synthesefähig wäre das dann ja auch
nicht.
Christoph Z. schrieb:> Synthesefähig wäre das dann ja auch nicht.
Das ist eh' nur eine akademische Spielerei im Simulator...
> aber so etwas sollte in dieser Aufgabe nicht nötig?
Wenn diese Parameter als Generics übergeben werden, dann sollte der
Schüler ja schon was damit machen. Und eben die Einhaltung der
Setup-Zeit kontrollieren und den Ausgang irgendwie verzögern.
Gustl B. schrieb:> dann helfen dir:> a <= b after TIME;> a <= transport b after TIME;> SIGNALNAME'LAST_EVENT
Ich würde an dieser Stelle noch auf das Attribut 'stable hinweisen.
Das könnte recht brauchbar für die Kontrolle der Setup-Zeit sein.
Lothar M. schrieb:>> aber so etwas sollte in dieser Aufgabe nicht nötig?> Wenn diese Parameter als Generics übergeben werden, dann sollte der> Schüler ja schon was damit machen. Und eben die Einhaltung der> Setup-Zeit kontrollieren und den Ausgang irgendwie verzögern.
Ach so, jetzt habe ich die Stelle auch gefunden.
Ja, das sind halt so Sachen, die ein Entwickler im Feld da halt komplett
nicht erwartet und dann einfach nicht sieht ;-)
Sorry for the noise
@Gustle Vielen Dank für deine Hilfe! Die DFF und MUX2X1 funktionieren
soweit. Allerdings hänge ich noch bei der D_RIPPLE_REG Architektur. Ich
weiß nicht genau, was für zusätzliche Signale ich benötige.
Wahrscheinlich benötige ich gar nicht alle, die ich angelegt habe. Was
ich noch nicht verstehe ist, wie ich die beiden Bausteine (DFF und
MUX2X1) miteinander verknüpfe. Wie macht man das? Wahrscheinlich denke
ich falsch, da ich eher mit Programmiersprachen wie Java und C++ zu tun
habe...
Das sieht zwar schön kompakt aus, erschwert aber die Lesbarkeit.
1
ffd:DFFportmap(
2
D=>D_TEMP(i),
3
CLK=>CLK_TEMP,
4
EN=>EN_TEMP,
5
RESET=>RESET_TEMP,
6
Q=>Q_TEMP(i),
7
Q_INV=>Q_INV_TEMP(i));
Henrik L. schrieb:> Ich weiß nicht genau, was für zusätzliche Signale ich benötige.
Du brauchst das als Signal was
a) noch in keiner der eingebundenen Komponenten enthalten ist
b) kein Ein- oder Ausgang ist.
Da bleiben im Bild oben die schwarzen Drähte zwischen den MUX und DFF
und die drei roten Drähte zwischen den DFF und den MUX.
Aber: Die roten Drähte gehen ja an Ausgänge, werden aber auch intern
verwendet. Genauso das Signal Output, da wird ebenfalls ein Ausgang
verzweigt. Es bietet sich daher an ein std_logic_vector für die Q zu
nehmen, Q_temp oder so, und einen gleich langen vector für die Ys von
den MUXes zu den Ds von den DFFs.
Weitere Signale braucht man nicht.
Henrik L. schrieb:> Was> ich noch nicht verstehe ist, wie ich die beiden Bausteine (DFF und> MUX2X1) miteinander verknüpfe.
Mit Signalen, wie in Hardware, mit Drähten.
Das folgende Beispiel zeigt, wie die Y Ausgänge von den MUXen mit den D
Eingängen der DFFs verbunden werden können.
Danke, mir wird dabei einiges klar. So ganz funktioniert es aber leider
noch nicht. Bei der Simulation der Testbench erhalte ich für die
Ausgänge nur undefinierte Werte.
kannst du auch schreiben
Q_INV_TEMP <= not Q_TEMP;
Aber wieso willst du das überhaupt invertieren?
Das DFF hat doch schon den Ausgang und den hast du sogar verwendet.
Q_INV => Q_INV_TEMP(i));
Also lass den process mit der Invertierung einfach weg.
Tja warum bleibt Q uninitialisiert? Weil du Q, Q_INV und OUTPUT nichts
zuweist.
Es fehlen:
Q <= Q_TEMP;
Q_INV <= Q_INV_TEMP;
OUTPUT <= Q(size-1);
Edit:
Die Y der MUXes hast du korrekt an die FFs angeschlossen. Aber bei den
Ds aus den FFs zu den E1 des nächsten MUX ist noch ein Denkfehler.
Und zwar wird nicht Q(i) an E1(i) verbunden, sondern Q(i) an E1(i+1).
Oder anders:
E1 => Q_TEMP(i-1);
Dabei wird also:
für i von 1 bis size-1:
E1 => Q_TEMP(i-1);
Aber dann hast du keinen Index 0 in der Schleife, auch nicht fein.
Du kannst das lösen, indem du die Schleife/Generate von 1 bis size
laufen lässt.
Dann musst du aber die Indizes anpassen und
Q_TEMP(0) <= INPUT;
hinzufügen. Da wird dann INPUT so behandelt als wäre es quasi das Q von
einem FF weiter links im Bild, das aber nicht existiert.
Henrik L. schrieb:> Jetzt funktioniert es auch.
Und jetzt musst du wahrscheinloch noch die als Generics übergebenen
Zeiten einsetzen:
1. mit 'stable überwachen, ob der Eingangswert des Flipflops vor der
steigenden Flanke stabil war, und eine Fehlermeldung ausgeben, falls
nicht
2. den Ausgangswert jeweils um die "delay"-Zeit verzögern
Henrik L. schrieb:> Dankeschön! Jetzt funktioniert es auch.
Bitteschön, gut gemacht!
Henrik L. schrieb:> Wäre schön wenn es in den> Skripten mal so verständlich rübergebracht werden würde!
Das hab ich ja auch so gelernt als IT Lehrer (-:
Die Dozenten an der Uni müssen leider keine Didaktikvorlesungen besuchen
oder mal vorher an einer Schule ein Praktikum machen.
Gustl B. schrieb:> Die Dozenten an der Uni müssen leider keine Didaktikvorlesungen besuchen> oder mal vorher an einer Schule ein Praktikum machen.
Ja, das ist ziemlich frustrierend für alle Studenten. Schon fast zynisch
ist es daher, dass die ETH Zürich gute Didaktik Kurse anbietet, die für
ETH Dozenten freiwillige Weiterbildungen sind aber "um sich neue
berufliche Optionen zu eröffnen, beispielsweise als Gymnasiallehrer/in
oder als Dozent/in an einer Fachhochschule", weil das da Pflicht ist.
Quelle: https://ethz.ch/de/studium/didaktische-ausbildung.html
Ui, keine Ahnung ob das üblich ist an Unis.
Was sehr weit verbreitet ist ist aber Didaktik. Ob man die als
Weiterbildung besuchen kann weiß ich nicht, aber wenn es da Lehramt
gibt, dann gibt es da auch Didaktik dazu. Die werden leider oft eher
stiefmütterlich behandelt und selbst im Lehramtstudium ist die Didaktik
nur ein kleiner Teil. Trotzdem machen die gute Arbeit die Didaktiken,
ich war da ein paar Jahre als studentische Hilfskraft und bekam ein paar
Einblicke.
Wer da mal reingucken möchte kann sich den
http://www.physikdidaktik.uni-karlsruhe.de/ durchlesen. Dieser Kurs, der
in Bayern (und vielen anderen Bundesländern) leider nicht unterrichtet
werden darf baut den Physikunterricht anders auf als üblich.
Üblich ist es, die Themen Wärmelehre, Elektrodynamik, Mechanik, Optik
und Akustik getrennt zu behandeln.
Allerdings hängen manche der Themen zusammen, haben sehr ähnliche
Konzepte und nur andere Begriffe. Nehmen wir Trägheit. Etwas wird als
träge bezeichnet weil es seinen Zustand nicht instantan ändert. In der
Mechanik muss ein sich in Bewegung befindlicher Körper erst seine
Bewegungsenergie loswerden bis er sich nicht mehr bewegt.
In der Wärmelehre haben wir auch den Austausch von Wärme zwischen
Körpern. Auch da gibt es Trägheit, es dauert bis beide Körper die
gleiche Temperatur haben. In der Elektrizitätslehre gibt es das auch
wenn etwas geladen oder entladen wird. Ein RC Filter reagiert träge weil
es eben Zeit dauert bis Ladungen in den Kondensator hinein und wieder
heraus fließen.
Oder nehmen wir Widerstand. In der Elektrik ist uns das klar, aber den
gibt es natürlich auch in der Mechanik. Wenn du unangeschnallt im Auto
sitzt, das bremst und du fliegst nach vorne, dann war der Widerstand
zwischen dir und dem Sitz/Auto zu groß die Reibung war zu klein. Durch
diesen großen Widerstand konntest du deine Bewegungsenergie nicht in der
kurzen Zeit an das Auto und über das Auto an den Boden abgeben. Der
größte Widerstand wäre wenn du gar nicht mit dem Auto verbunden wärest.
Der Sicherheitsgurt verringert den Widerstand, du kannst deine
Bewegungsenergie an das Auto und das Auto über die Bremsen und Reifen an
den Boden abgeben.
Und genau so schöne Themenfelderübergreifende Erklärungen bietet der
Karlsruhger Physikkurs.
-gb- schrieb:> Üblich ist es, die Themen Wärmelehre, Elektrodynamik, Mechanik, Optik> und Akustik getrennt zu behandeln.> Allerdings hängen manche der Themen zusammen, haben sehr ähnliche> Konzepte und nur andere Begriffe
Genau. Nur um dann in späteren Semestern das alles wieder mühsam
zusammen zu hängen, weil in der Realität eh alles zusammenhängt und dazu
kommt, dass mittlerweile eh viele Sachen mit Multiphysics
Simulationssoftware entwickelt wird. In meinem Akustikkurs wurde mir
dann ja auch beigebracht, wie man Akustische/Mechanische Systeme in
äquivalente Systeme transformiert, die elektrische Elemente nutzen (Also
akustische Zusammenhänge als Kondensatoren/Spulen/Widerstände
dargestellt). Das ist der frühere Ansatz für Multiphysics Simulation, es
wir alles übersetzt, so dass es in Spice reinpasst :-)