Hallo liebe Community, ich möchte einen Motortreiber basteln mit welchem ich den folgenden DC Motor ansteuern möchte: CIM PM805-001 22vdc 020507 Scheinbar - denn das Datenblatt od ähnliches habe ich nicht gefunden - hat der Motor folgende Ratings: The motor is250W, 22V DC, @ 11.5A. Operates on two 12V batteries. Beim Anfahren kann ein Strom von bis zu 20A fließen (wenn unbelastet). Sprich ich brauche einen Treiber der den Motor mit bis zu 500W versorgen kann. Ich habe kürzlich einen Treiber in Form einer PCB realisiert der für low-saturation-applications brauchbar ist (16V @1A) .. Das sind nun ganz andere Maßstäbe und ich wollt euch fragen wie die Herangehensweise in so einem Fall ausschaut? Welche Faktoren werden dazu kommen? Was muss ich beobachten? Das sind ganz schöne Zahlen wovor ich vor meiner ersten Erfahrung ein bisschen Respekt zeige. Ich wäre wirklich dankbar drüber wenn ihr mir weiter helft :) Schöne Grüße aus Wien, \mZ
:
Verschoben durch Admin
Muss das wirklich Eigenbau sein ? Auf Ebay / China findest du 43A H-Brucke für 10€ ! Das kann man selbst nie hinkriegen. http://www.ebay.com/itm/Semiconductor-BTS7960B-43A-Stepper-Motor-H-Bridge-Drive-PWM-For-Arduino-New-DHUS-/251574651513?hash=item3a93048a79:g:hfsAAOSwd4tTsNEz
Hallo Jan, es soll Teil meiner Bachelorarbeit werden. Sprich kaufen kommt nicht in Frage :/ würde mir auch keinen Spaß machen :)
Hallo, > Martin Z. schrieb: > ich möchte einen Motortreiber basteln mit welchem ich den folgenden DC > Motor ansteuern möchte: CIM PM805-001 22vdc 020507 ja und was soll der Motortreiber können? - einfach nur AN/AUS oder auch - Richtungsumschaltung oder auch - Drehzahlsteller (PWM, wenn ja, welche Frequenz) Sonstige Randbedingungen? Das gute heutzutage ist, dass man für die popligen 30A winzige FET bekommt, die Stöme über 100A abkönnen und bei 10...15A noch nicht mal einen Kühlkörper benötigen (Kanalwiderstand um 1 mOhm). Gruß Öletronika
:
Bearbeitet durch User
Hi :) danke für deine Rückmeldung! Es wäre natürlich wünschenswert wenn der Treiber mit PWM gesteuert werden kann. Ob er einen extra DIR-Pin aufweist oder nicht ist sekundär da ich per SW dies lösen kann. Also grundsätzlich bin ich schon glücklich wenn er mittels PWM gesteuert wird. Aber I²C oder ein anderes Protokoll wäre kein Problem. Frequenz um die 20kHz (aber da sag ich gerade irgendeinen Wert einfach aus der Erfahrung. Müsste das mal in Ruhe testen) ... Sonst fällt mir nichts ein :) Die Frage ist ob ich zu einem Motortreiber oder zu der Kombination FET-Treiber plus die H-Brücke (wenn diese den gate driver nicht integriert hat) zurückgreifen kann/muss. Ich habe eine Versorgungsspannung von 24V (je nachdem ob ich sie regulieren mag/muss oder nicht). Ich gehe jez davon aus dass ich den Motortreiber direkt an die Spannungsversorgung anhänge: wie schon oben erwähnt, 250W "normaler Betrieb", max. Leistung 500W. D.h. ein Halb- bzw. Vollbrückentreiber mit einem continuous drain current von ~12A (ich hab aufgerundet + 1A) bzw. einem puls drained current von ~22A (wieder aufgerundet) sollte doch für meine Anwendung reichen oder vernachlässige ich einen wichtigen Faktor? Was sagst du zu dieser Auswahl? :) (link shortner mag er nicht ^^) http://at.farnell.com/webapp/wcs/stores/servlet/Search?catalogId=15001&langId=49&storeId=10153&categoryId=700000004216&sort=P_ATT_BASE_VALUE_1002631_DE_DE|1&beginIndex=1&showResults=true&aa=true&pf=310122134,310122431,310124354,310132976,310143655,310181018,310183996,310192613,310198164,310204232,310204350,310312944,310313695,310314191 Danke im Voraus und schöne Grüße aus Wien! Martin
Hallo, du schreibst ziemlich wirres Zeugs. Offenbar bist du dir über einieg grundsätzliche Dinge nicht im klaren. > Martin Z. schrieb: > Es wäre natürlich wünschenswert wenn der > Treiber mit PWM gesteuert werden kann. Ob er einen extra DIR-Pin > aufweist oder nicht ist sekundär da ich per SW dies lösen kann. Blödinn das! Wie willst du eine PWM-Ansteuerung softwarewäßig lösen, wenn der Motortreiber gar keine PWM kann. > Also grundsätzlich bin ich schon glücklich wenn er mittels PWM gesteuert > wird. Aber I²C oder ein anderes Protokoll wäre kein Problem. Aha, was aber die PWM zur Motorsteuerung mit einem Datenübertagungsprotokoll wie I²C zu tun haben soll, wird wohl dein Geheimnis bleiben. Ob der Motor nun außer EIN-/AUS noch zusatzlich in irgend einer Weise geteuert werden soll, wissen wir immer noch nicht, nur das dich bestimmte Schlagworte glücklich machen. > Frequenz um die 20kHz (aber da sag ich gerade irgendeinen Wert > einfach aus der Erfahrung. Woher kommt diese Erfahrung? Wo steht, dass eine PWM mit 20KHz gut ist? Meine Erfahrung sagt mir, dass man das auch mit ca. 1kHz oder weniger machen kann. Niedrigere Frequenzen haben oft auch einige Vorteile (geringere Anforderungen an Dynamik der Schaltung, geringere Umschaltverluste, weniger EMV-Probleme usw.) > Die Frage ist ob ich zu einem Motortreiber oder zu der Kombination > FET-Treiber plus die H-Brücke (wenn diese den gate driver nicht > integriert hat) zurückgreifen kann/muss. Du must wissen, was du willst. Fertige Treiber-IC nehmen dir einige Problem ab, die du als Anfänger noch gar nicht kennst. Wenn du aber so was im Rahmen wissenschaftlicher Arbeit ausführst, kann es auch sinnvoll sein, mal eben die Grundlagen zu lernen und es selber von Grund auf zu entwickeln. Ich habe auch vor paar Jahren mal eine Motortreiber-Vollbrücke nur aus diskreten BE entwickelt (24V/15A, allerdings ohne PWM). Das hat auch den Vorteil, dass man solche Schaltungen quasi zeitlos herstellen kann und nicht an die Lieferbarkeit von speziellen Motortreiber-ICs gebunden ist. > Ich habe eine Versorgungsspannung von 24V (je nachdem ob ich sie > regulieren mag/muss oder nicht). Hä? Wer soll darin einen Sinn erkennen? > Ich gehe jez davon aus dass ich den > Motortreiber direkt an die Spannungsversorgung anhänge: Ich habe mal vor Jahren eine einfachen PWM-Treiber mit FET in der Größenordnung entwickelt, ca. 28V/10...15A (für eine Pumpe). Da gab es das Problem, dass bei schnellem Absteuern des Motors die Gegeninduktion die Spannung anhebt und damit versucht in das Netzteil Strom zurück zu speisen. Je nach NT spricht die Schutzbeschaltung an oder das NT geht auch kaputt. Deshalb habe ich dann den Motor zusätzlich mit Dioden und Elkos von dem NT einkoppeln müssen. Das lief dann gut. Bei Betrieb an Akkus wirst du das Problem aber wohl eher nicht haben. > wie schon oben erwähnt, 250W "normaler Betrieb", max. Leistung 500W. > D.h. ein Halb- bzw. Vollbrückentreiber mit einem continuous > drain current von ~12A Ja was nu? Soll es eine Richtungsumschaltung geben oder nicht? Dir sind die Unterschiede bei der Verwendung von Halbbrücken und Vollbrücken wohl gar nicht bewußt? > (ich hab aufgerundet + 1A) bzw. einem puls drained current von ~22A > (wieder aufgerundet) sollte doch für meine Anwendung reichen Ich glaube nicht, dass ein solcher Motor nur einen max. Strom von ca. 20A haben wird. Der Blockierstrom ("stall currend") wird vermutlich viel höher liegen. Dieser fließt auch beim Anlaufen für einige 10ms. > oder vernachlässige ich einen wichtigen Faktor? Du solltest mal aufhören, um das Thema nur drum herum zu reden und anfangen, dich mit ein paar Grundlagen vertraut zu machen. Das ist Basis jeder Ing.-Tätigkeit. Außerdem besorge dir die korrekten Datenblätter oder nehme die Motorkennlineien selbst auf. Um in einem Forum guten Rat zu bekommen, macht es auch Sinn, gleich mal richtig zu schreiben, wozu das ganze dienen soll und welche Randbedingungen insgesamt zu beachten sind. Ansonsten macht es für potentielle Fachleute sehr schnell keinen Spaß mehr, überhaupt zu antworten, wenn der Fragesteller sich jedes Detail sehr langwierig aus der Nase ziehen läßt und man merkt, dass er seine Hausaufgaben nicht macht. Die Frage, welche ich im vorherigen Posting gestellt hatte, sind nicht geklärt worden, sondern nur einige neue Unklarheiten dazu gekommen. http://uwiatwerweisswas.schmusekaters.net/Uwi/Wie%20man%20Fragen%20richtig%20stellt.pdf Gruß Öletronika
:
Bearbeitet durch User
ziemlich wirres Zeugs? Aha! *) ich schreibe zwei Sätze: 1) Es wäre natürlich wünschenswert wenn der Treiber mit PWM gesteuert werden kann. => Punkt neuer Satz. 2) Ob er einen extra DIR-Pin aufweist oder nicht ist sekundär da ich per SW dies lösen kann. => Ja sekundär weil die Richtung kann ich sehr wohl per SW ändern wenn der Treiber-IC zB zwei Pins für die Ansteuerung von einer H-Brücke aufweist! *) I2C: Es ist lediglich "egal" ob ich einen Controller mit einem I2C interface habe, welcher meinen Treiber-IC steuert. *) "nur das dich bestimmte Schlagworte glücklich machen" Sorry du solltest dir mal meinen ersten und meine weiteren Beiträge durchlesen bevor du irgendwas daher behauptest - nur weil du "angeblich" das Fachwissen besitzt! Ich habe schon gesagt: PWM ja gut! DIR-Pin ist mir egal (siehe oben)! gewünschte Frequenz? Weiß ich nicht - habe ich auch oben geschrieben. Ich erwähnte es bereits dass ich einen Treiber in kleineren Rahmen schon mal gemacht habe. Was ist zu beachten wenn das ganze leistungsstärker wird?! wie schauts aus mit Umschaltverluste? EMV? etc. etc. *) Dass ich Elkos und Dioden brauche ist mir schon klar. Ich hänge den Treiber wohl ned direkt - ohne irgendwas weiteres - direkt an die Versorgungsspannung. Aber gut ich sage auch nur "ich esse" und nicht "ich esse meine Speise mit einem Gabel und einem Messer". Wie gesagt, wenn du es liest dass ich schon Erfahrung in diesem Bereich habe (low-saturation-applications!) kannst es auch mal selber herleiten dass ich nicht jeden Punkt erwähnen kann weil bestimmte Dinge selbstverständlich sind. *) "die Unterschiede bei der Verwendung von Halbbrücken und Vollbrücken wohl gar nicht bewusst" .. geh bitte .. ich weiß sehr wohl wie man eine Richtungsänderung vornimmt! Versuche hier nicht alles so zu drehen und biegen wie es dir passt. Abgesehen von der Tatsache dass du schon mal einen PWM-Treiber mit FET entwickelt hast, kriegt man auch von dir nicht raus. Aber gut danke - lassen wir den Thread. Wir reden nur aneinander vorbei. Ich werde den Betreuer kontaktieren. Schönen Tag
Martin Z. schrieb: > Sprich kaufen kommt nicht in Frage Ich würde das einfach mal als "Denkanstoss" sehen. Kauf das Ding (und am besten noch 2-3 andere), sieh dir an wie die das machen und denk drüber nach. Man muss ja nicht jeden blöden Fehler selber machen... Martin Z. schrieb: > Aber gut danke - lassen wir den Thread. Wir reden nur aneinander vorbei. ... Guten Tag. Ich habe den Eindruck, deine Kritiktoleranz bzw. -akzeptanz ist eher unterdurchschnittlich ausgeprägt. Sieh es mal so wie es tatsächlich heut wollen dir Leute durchaus helfen und wenden dafür kostenlos ihre Freizeit auf. Diese Leute könnten die gestellte Aufgabe durchaus prozesssicher in 1 Woche lösen. Und du sagst "wir reden aneinander vorbei". Das gäbe mir zu Denken. Evtl. stellst du nur die falschen Fragen oder erwartest andere Antworten. > Ich werde den Betreuer kontaktieren. Tu das...
Hallo Lothar, Okay danke für den Tipp! Werde mir mal ein paar Treiber zulegen und testen. Ist okay wenn du das so siehst. Dass das geschriebene meistens fehlinterpretiert wird, ist glaube ich klar. Vorallem wenn man sich nicht auf persönlicher Ebene kennt. Ich schätze jede Hilfe die ich bekommen kann - ich schätze die Freizeit die man opfert. Glaube mir das! Mag sein dass ich die falschen Fragen stelle. Aber dann kann man mich explizit darauf ansprechen. Ich weiß dass ich DC Motoren ansteuern möchte, Spg und Strom habe ich bereits erwähnt. Angenommen ihr sagt, ja es gibt schon fertige ICs die in Frage kämen: PWM wäre schön, DIR-Pin ist sekundär, Frequenz weiß ich nicht weil ich den DC Motor erst testen muss... Ich erwähne explizit dass ich die Erfahrung aufweise. Ja ich bin kein Profi. Und ja ich zeige Respekt weil 500W! Das sind ganz andere physikalische Größen im Vergleich zu meiner bisherigen Erfahrung. Tipps die zB brauchbar wären - das ist bitte random(!): * baue eine FET H-Brücke auf anstatt einen IC zu verwenden weil die und die Vorteile * was soll ich beachten wenn mein Motor blockiert? * Lese dir diesen Link durch. Da steht es beschrieben wie was * kaufe einen fertigen Treiber und schau dir das und das an weil das ist nämlich wichtig Wenn ich mich gut auskennen würde, würde ich nicht fragen. Habe ich etwas vergessen aufzuschreiben? Dann kann man das leicht kommunizieren anstatt einen Link zu posten der Dummies erklären soll wie man richtig fragen stellt. Aber dass ich hier keine Details zur Beschaltung eines Treibers poste, od wie eine Richtungsänderung mittels einer H-Brücke erfolgt .. ja gut, wenn ich das nicht weiß dann fange ich gar nicht damit an. Man kann auch davon ausgehen dass die Person gegenüber a bissl eine Ahnung hat und nicht "wirres Zeug daher redet" wenn das geschriebene unklar ist. Ich bin der Meinung dass sich viele Leute versteifen und aufregen anstatt die Tatsache zu erkennen dass leute wie ich hier sind weil wir uns eben mit solchen Themen nicht gut genug auskennen...
Nicht ganz billig, aber für dein Anliegen evtl. der direkte Weg zum Ziel: 2 Stk. IXYS Gatetreiber XDN630. Sagt ja keiner das man da ein Gate dranhängen muss... Sonst muss Du halt eines der vielen Brushless Schaltbilder im Internet abmalen und die 3. Phase weglassen. viel Erfolg hauspapa
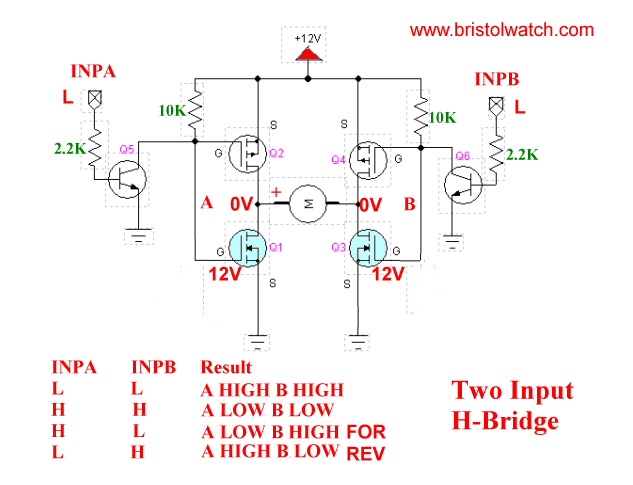
Danke hauspapa :) :) Ist schon auf der Merkliste. Dh ich baue eine MOSFET H-Brücke auf und steuere sie mit dem Treiber an ?! Zum Aufbau der H-Brücke - angenommen ich baue so eine Schaltung auf: http://www.bristolwatch.com/ele/moshbridge/mosh7.png Muss ich noch etwas beachten? Wichtig dabei is die richtigen MOSFETs auszuwählen. Das ist natürlich klar. Die Widerstände muss ich natürlich anpassen. Die Schottkydiode ist wichtig wenn der MOSFET diese nicht integriert hat. Bei Q1 und Q3 würde ich noch einen GS-Widerstand schalten. Weiteres brauche ich einen current controller ... Vergesse ich auf etwas? Abgesehen von den Stützkos und Verpolungsschutz etc.
Um die Verwirrung mal aufzulösen: Ihr redet aneinander vorbei: Martin geht bei PWM, DIR-PIN, I2C und allem von der Ansteuerung des Treiber aus. Das ist aber zu weit gedacht. Man muss sich zunächst die Frage stellen was der Treiber denn kann. Denn nur wenn der überhaupt eine Brücke hat bzw. dafür ausgelegt ist, kann man (ob mit DIR PIN oder Umpolen) überhaupt erst rückwärts fahren. Weiterhin ist die PWM als EINGANG in den Treiber auch zweitrangig. Die vom Motor ist wichtig. Und die hängt sowohl von der gewünschten Sänfte als auch vom Motor direkt ab. Da kommt man vermutlich nicht um Experimentieren umher, aber je größer der Motor desto (in Grenzen!) geringer die Frequenz (höhere Masseträgheit). Das sind alles Sachen, die man bei Infos zum Projekt ein bisschen herauslesen kann. Soll es ein Gefährt werden, soll es ein elektrischer Rasenmäher werden, außerdem macht es natürlich alles interessanter wenn man weiß worum es geht. Oh und: Martin, du musst dir besonders hier aber auch generell mehr Frustrationstolleranz zulegen. Einfach nicht ernst nehmen. Wobei dann andererseits sich die Leute hier einfach manchmal ein bisschen belehrend etc. ausdrücken, aber auch da gilt wieder: Lies es als normalen Text und gut. Achja: H-Brücke aus MOSFETs oder ein Treiber IC? Naja, wenn, dann hat der IC die selbst integriert. Andererseits geht es bei den Störmen gar nicht anders als via externer diskreter H-Brücke, alleine schon wegen der Thermik. Ich tippe mal ein IC wird nur PWM ausgeben und ggf. via Shunt den Strom messen. Damit kann er durch anpassen der PWM z.B. einen Sanftanlauf ermöglichen (Um Spitzenströme, die durchaus mal 5-10x Nennstrom sein können, zu verhindern). Dann noch die Frage was passiert, wenn der Motor blockiert? Der Strom steigt an (Wie eine Spule, kein Kühlwind mehr, alles brennt), daher wird ein guter IC auch hier dann abbrechen. Siehe z.B. Beitrag "Überlast erkennung DC-Motor" (hab's nur überflogen), aber auch das kommt wieder auf deine Anwendung an. Kann der Motor nie überlastet werden (Tischventilator), dann braucht man das nicht.
>Zum Aufbau der H-Brücke - angenommen ich baue so eine Schaltung auf...
Mit 24V und mehr ist das eine ganz schlechte Idee. Die zulässige Gate-
Source Spannung wird überschritten. Ausserdem mag ich solche Schaltungen
ganz und überhaupt garnicht weil im Schaltaugenblick beide FETs einer
Halbbrücke leitend sind. Je besser die Bauteile desto mehr geht das
schief.
H Brücke nach Datenblatt vom HIP ist ok. Die XDN630 haben sehr kräftige
Ausgangstransistoren. Da kann man seine Last auch ruhig direkt dran
hängen.
schönes Wochenende
hauspapa
S. K. schrieb: > H Brücke nach Datenblatt vom HIP ist ok. Die XDN630 haben sehr kräftige > Ausgangstransistoren. Da kann man seine Last auch ruhig direkt dran > hängen. war noch in der Arbeit und hab das Datenblatt von MOSFET Gate Driver IXDN630 nicht gefunden. Wg dem fehlenden 'I' hats googlen vorerst nicht gefunden :) Also jez zuhause: wow geilo :) :) Das ist ja ein Traum - auch wenn basteln fürs Lernen natürlich cooler ist. Aber wenns schnell gehen muss. HIP4082IBZ und IXDN630 sind spitze :) dann kümmere ich mich noch um die over current Sachen und bin super glücklich Eine blöde Frage hätt ich noch: Der IXDN630: warum heißt das Ding "MOSFET Gate Driver"? Das ja eigentlich eine Halbbrücke oder spinne ich gerade?!? Schönes Wochenende und vielen Dank - an alle natürlich!
:
Bearbeitet durch User
Das ist ein Gatetreiber für die ganz dicken Dinger. Die Spannung ist hoch genug um mit verschobenem Nullpunkt auch negative Abschaltspannungen realisieren zu können. Aber Vorsicht, der ist nicht in erster Linie stark, der ist vor allem sauschnell. Bedeutet: Stützkondensatoren so dicht wie möglich, saubere Leitungs- und Masseführung sonst birgt das Verhalten Überraschungen... alles Gute hauspapa
Hallo, > Martin Z. schrieb: > Aber gut danke - lassen wir den Thread. Wir reden nur aneinander vorbei. du hast auch auf Rückfrage keine klaren Informationen dazu gegeben, was du konkret machen willst. Daraus wärde ja evtl. zu entnehmen, welche Eigenschaften der Treiber haben sollte. Statt dessen z.B. eher wirre Gedanken über I²C und irgend welchen SW-Lösungen auf die einfache Frage, ob du eine Richtungsumschaltung benötigst aber keine klaren Ansage zu technischen Details und Randbedingungen, wie ich das schon bei ersten Posting angefragt hatte. Nun 15 Postings weiter hast du immer noch nicht viel in der Hand. Aber ich bereue inzwischen, überhaupt auf die Frage geantwortet zu haben. Statt mal Klartext zu schreiben, so dass ein Techniker damit was anfangen kann, spielst du die Mimose. Aber ist ja nicht so, dass mich jemand dazu zwingt, anderen Hilfestellung zu geben. Du schreibst oben: > Mag sein dass ich die falschen Fragen stelle. > Aber dann kann man mich explizit darauf ansprechen. Und genau das habe ich schon im ersten Posting gemacht. > Ich werde den Betreuer kontaktieren. dann mache das mal.
U. M. schrieb: >> Ich werde den Betreuer kontaktieren. > dann mache das mal. https://de.wikipedia.org/wiki/Betreuer_(Recht)
Hey, okay okay ich habe mich zu ungenau ausgedruckt bzw. war mit den Gedanken schon einen Schritt weiter. Ich versuche es nochmal. Die Motoren (2x) sollen einen E-Rollstuhl von Permobil in Bewegung setzen. Dieser wird mit der Kinect Kamera und diversen Sensoren ausgerichtet um autonom fahren zu können. Es muss erwähnt werden dass dies ist nur ein Forschungsprojekt ist. Sprich wenn er mich od meinen Kollegen in Bewegung setzt, sind wir vorerst glücklich. Als Eval-Board steht uns der EK-TM4C1294XL von TI zur Verfügung. 2x 12V Autobatterie als Versorung...sonst fällt mir im Moment nichts ein. Bitte einfach nachfragen wenn ich was wichtiges vergessen habe... Mein grundlegende Gedanke ist mit welcher Option ich den Treiber realisieren soll: * MOSFET Treiber plus diskrete FET Brücke * MOSFET Treiber plus FET Brücke in Forms eines ICs * Fertige Motortreiber ICs Für jede Variante habe ich mir folgende Überlegungen gemacht bzw. Bauteile ausgesucht: * INTERSIL HIP4082IBZ MOSFET Driver IC + eine diskret aufgebaute power MOSFET-Brücke (wäre die größte Herausforderung) * INTERSIL HIP4082IBZ MOSFET Driver IC + IXDN630CI Gate Drivers * INFINEON BTN8962TA MOTORTREIBER, HALBBRÜCKE Also U.M.: ist es nicht richtiger mit den o.a. Überlegungen anzufangen? Im nächsten Schritt kann ich mir Gedanken machen was der Treiber können soll. Aber grundsätzlich möchte ich mittels PWM die Geschwindigkeit regeln und die Richtung umdrehen können (entweder mittels umpolen der Eingänge od DIR-Pin zB). Also meine erste Überlegung sollte sein: * wie komme ich zum Ziel (siehe oben) .. ich tendiere zur Variante #3 od #2 * wenn ich mich für eine Variante entschieden habe, suche ich mir unter Berücksichtigung meiner Anforderungen die geeigneten Bauteile aus * Maßnahmen für over current, under voltage protection etc. treffen (shunt plus OVP zB) Sind diese Infos hilfreicher? PS: ich habe nicht die Mimose gespielt. Wie gesagt geschriebenes kommt meistens falsch rüber! Schönen Tag
Angehängte Dateien:
-

Motor_Driver.PNG
4,3 KB
{kind=link}
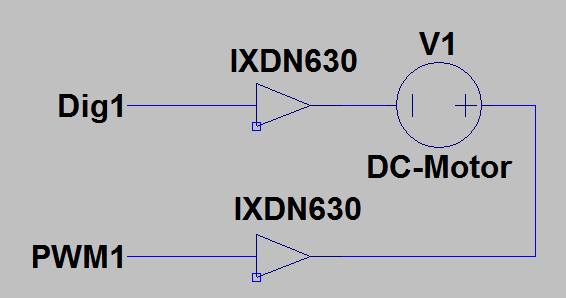
IXDN630CI hat direkten Logikeingang, da brauchst Du keinen HIP.
1 PWM Ausgang und ein Logikausgang fertig.
Logik Ausgang | 0 | 1
_________________|_________________|____________
| |
PWM 0% | Stillstand | AK rückwärts
50% | halb voraus | halb zurück
100% | AK vorwärts | Stillstand
soweit die Theorie
hauspapa
Hey hauspapa! danke nochmal für deine Rückmeldung. An die Option hab ich natürlich auch gedacht (ohne den HIP). Das einzige Problem beim IXDN630CI ist dass er lt. dem Datenblatt einen continuous output current von max. +-8A aufweist. Datenblatt: http://www.mouser.com/ds/2/205/IXD_630-472742.pdf 1.5 Electrical Characteristics: TA = 25°C Wohingegen der Infineon Motortreiber "BTN8962TA" einen HS/LS continuous drain current von 30A bei TC < 85°C aufweist. Link @farnell: http://at.farnell.com/infineon/btn8962ta/motortreiber-halbbr-cke-to263/dp/2470126/false Link @manufacturer: http://www.infineon.com/cms/de/product/power/motor-control-and-gate-driver-ics/intelligent-motor-control-ics/single-half-bridge-driver/channel.html?channel=db3a3043437e2e96014390bd73c4615c#goto_producttable Datenblatt: http://www.farnell.com/datasheets/1886713.pdf 4.1 Absolute Maximum Ratings - siehe auch figure 4 Seite 7. Was meinst du? Bzw. benutzt du ihn selber und hast schon mal den Ausgangsnennstrom gemessen? Danke und LG! Martin
:
Bearbeitet durch User
Infineon: Hübsches Spielzeug, brauchst Du halt mindestens 2 PWM Kanäle mit deadtime, besser währen 4. IXYS: Wollte nur darauf Hinweisen das Du keinen HIP irgendwas brauchst. Musst den nicht mit Gewalt verwenden. Selbst verwende ich den kleinen Bruder davon. Allerdings nur als Gatetreiber für IGBTs Ich würde wohl den Infineon nehmen und glücklich sein. hauspapa
Hallo, > Martin Z. schrieb: > Die Motoren (2x) sollen einen E-Rollstuhl von Permobil in Bewegung > setzen. Dieser wird mit der Kinect Kamera und diversen Sensoren > ausgerichtet um autonom fahren zu können. Ok, das wäre von Anfang an eine sehr hilfreiche Info gewesen. > Mein grundlegende Gedanke ist mit welcher Option ich den Treiber > realisieren soll: > * MOSFET Treiber plus diskrete FET Brücke > * MOSFET Treiber plus FET Brücke in Forms eines ICs > * Fertige Motortreiber ICs Also gut. Variante 3 ist zunächst die Sorgloslösung. Ein kompletter Motorteiber-IC hat normal ein Pins zur Richtungsumschaltung. Er steuert auch die FET in der Brücke mit den richtigen Timings. Zusätzlich sind meist Überspannungsschutz und Möglichkeiten für Überstromschutz als auch Schutz vor thermischer Überlast integriert. Es werden auch in der Regel verschiedene Modi angeboten wie z.Bremsbetrieb oder Freilauf unerstützt. Nachteil: Die Leistung und max. Strom sind eher begrenzt. Ich würde aber zur 2. Variante tendieren, mit speziellem Treiber für FET-Halbbrücke oder Voll-Brücke. Vorteil: Man hat mit den Ansteuer-IC die meisten Vorteile der integrierten Lösung aber deutlich mehr Freiraum bei der Auswahl der FET. http://www.irf.com/product/Power-MOSFETs-12V-500V-N-Channel-Power-MOSFET-40V-60V-N-Channel-Power-MOSFET/_/N~1njpm4 Da kann man FET nutzen, mit nur 1...2 mOhm Kanalwiderstand haben und Spitzenströmen weit über 100A (auch bis über 300A) aushalten. Das hat den Charme, dass im Fehlerfall nicht so schnell die Halbleiter abbrennen. Außerdem braucht man bei solchen FET mit popligen 10-20A keinen Kühlkörper mehr. Die Halbbrücke, die ich mal für eine Pumpensteuerung 28V/12A gemacht hatte, war kaum größer als eine Zigattenschachtel. Als Kühlung reichen einige cm², etwas dickere Kupferfläche (z.B. 70u) auf der LPL. Die FET im SMD-Gehäuse werden nicht mal richtig warm. In Im Entwicklungsprozess wird so was (Fehler, Kurzschluss) fast zwangsläufig passieren. Mit einem Leitungswiderstand von 0,1 Ohm an 24V-Akkus kann man die FET mit Überstrom dann praktisch gar nicht mehr kaputt bekommmen, weil der Strom nicht über ca. 200A steigen kann. Natürlich muß man Sicherungen im Stromkreis haben, die dann rel. schnell wegbrennen. Als Ansteuer-IC habe ich mal IR2104 benutzt. http://www.irf.com/product-info/datasheets/data/ir2104.pdf Hier gibt es eine große Auswahl an Treibern für FET-Brücken. http://www.irf.com/product/Motor-Control-Gate-Driver-Non-Isolated-Gate-Driver-ICs-and-Controllers-General-Purpose-Gate-Driver-ICs/_/N~1njcii Für Vollbrücke würde man natürlich 2 Halbbrückentreiber benötigen oder eben einen Brückentreiber für eine Vollbrücke. > Für jede Variante habe ich mir folgende Überlegungen gemacht bzw. > Bauteile ausgesucht: > * INTERSIL HIP4082IBZ MOSFET Driver IC + eine diskret aufgebaute power > MOSFET-Brücke (wäre die größte Herausforderung) Was ist daran eine Herausforderung 4 fette FET anzulöten? > * INTERSIL HIP4082IBZ MOSFET Driver IC + IXDN630CI Gate Drivers > * INFINEON BTN8962TA MOTORTREIBER, HALBBRÜCKE > Also U.M.: ist es nicht richtiger mit den o.a. Überlegungen anzufangen? Das ist schon richtig. Wie ich schon geschrieben habe, denke ich, das der ausgesuchte Motor viel mehr Strom ziehen kann, als die genannten 20A. Wenn die FET aber auch zumindest kurzfristig 100A und viel mehr aushalten, dann wird das ganze deutlich robuster. > Im nächsten Schritt kann ich mir Gedanken machen was der Treiber können > soll. Aber grundsätzlich möchte ich mittels PWM die Geschwindigkeit > regeln und die Richtung umdrehen können (entweder mittels umpolen der > Eingänge od DIR-Pin zB). Ja. > * wenn ich mich für eine Variante entschieden habe, suche ich mir unter > Berücksichtigung meiner Anforderungen die geeigneten Bauteile aus > * Maßnahmen für over current, under voltage protection etc. treffen > (shunt plus OVP zB) Ja, wobei man auf Überstromdetektion erstmal weglassen kann, wenn das Gerät nur unter Aufsicht betrieben wird und man eine KFZ-Sicherung z.B. 30A einbaut. Das spart erstmal viel Mühe an Nebenschauplätzen. > Sind diese Infos hilfreicher? Auf alle Fälle. > PS: ich habe nicht die Mimose gespielt. Wie gesagt geschriebenes kommt > meistens falsch rüber! Schönen Tag Dann versuche mal, sich beim Schreiben dumm zu stellen. Das ist auch sehr hilfreich, wenn man selber Arbeiten und Dokumente erstellt. Man darf nie davon ausgehen, dass der Leser weiß, was gemeint ist, wenn etwas anders geschrieben steht. Noch ein Tip: Die Brücktreiber-FET erzeugen meist aus der PWM über eine Ladungspumpe das Ansteuerpotential für den High-Side-FET. Das hat zur Folge, dass man den Motor nie mit 100% fajren kann. Ich habe damals einen 12V-DCDC-Wandler benutzt, um die High-Side Steuerspannung zu erzeugen. Damit kann man dann auch 100% Einschaltzeit fahren. Bei der PWM-Frequenz müßt ihr mal probieren. Vermutlich werden paar hundert Hz optimal sein. Ich würde nur so hoch gehen, wie nötig. Als Überspannungsschutz für die FET empfehle ich kräftige Suppressordioden. Induktive Spannungsspritzen könnten die FET schnell killen. Gruß Öletronika
:
Bearbeitet durch User
Hey! Danke für den Support hauspapa :) :) U. M. schrieb: > Ok, das wäre von Anfang an eine sehr hilfreiche Info gewesen. Ok merke ich mir auf jeden Fall fürs nächste Mal :) > Also gut. > Variante 3 ist zunächst die Sorgloslösung. Ok also Vorteile und Nachteile check :) > Ich würde aber zur 2. Variante tendieren, mit speziellem Treiber für > FET-Halbbrücke oder Voll-Brücke. Hey sau cool danke. Macht auf jeden Fall Sinn! Hast mich überredet - Bootstrap ftw hehe > Was ist daran eine Herausforderung 4 fette FET anzulöten? Das wäre eh zB 4x den IR2104 + 8 N-Channel Power MOSFETs wie den IRF1405Z (obwohl der jez nicht so der niedrigen Kanalwiderstand hat) + paar Rs, (El)Kos und Dioden ala typical connection vom Datenblatt? Überhaupt nicht schwer. Im Endeffekt eh dass was du oben vorschlägst :) > Ja, wobei man auf Überstromdetektion erstmal weglassen kann, wenn das > Gerät nur unter Aufsicht betrieben wird und man eine KFZ-Sicherung z.B. > 30A einbaut. Das spart erstmal viel Mühe an Nebenschauplätzen. Ok! Bleibt eh nur die Nebenschaltung. Weil der Treiber dead-time prevention, uv detect usw anbietet. > Man darf nie davon ausgehen, dass der Leser weiß, was gemeint > ist, wenn etwas anders geschrieben steht. Mhm du hast recht! > Als Überspannungsschutz für die FET empfehle ich kräftige > Suppressordioden. Induktive Spannungsspritzen könnten die FET schnell > killen. Super Tipp dank da!! Genau sowas habe ich gesucht :) :) Hast mich gerade voll glücklich gemacht - dank da! Weiß ich zu schätzen. Schönen Abend und schöne Grüße aus Wien Martin
:
Bearbeitet durch User
Hallo, im Anhang noch 2 Schaltungen von Motorsteuerungen, die praktisch bei mir im Einsatz sind. Die kannst du mal als Anregung nehmen. Die Halbbrücke dient als Pumpensteuerung an einer DC-Pumpe mit ca. 300W. Die müßte natüprlich doppelt aufgebaut werden und mit ein paar Gattern auch die Richtungsumschaltung realisiert werden. Mit der diskret aufgebauten Steuerung werden Stellmotore einer hydraulischen Höheneinstellung angesteuert. Die ist aber so nicht für PWM gedacht. Das Timing zum Ansteuern der FET bei Richtungswechsel ist sehr langsam eingestellt. Man könnte das aber auch schneller machen, so dass auch paar hundert Hz möglich sein sollten. Da müssen die C21/C41 kleiner eingestellt werden. Das Timing sollte immer so sein, dass beim Umschalten zuerst die offenen FET schließen und erst dann die geschlossnen FET öffnen. Diese Funktion wird bei den Brücken-Treiber-IC auch realiert, nur dass die Umschaltzeiten ziemlich kurz sind (im Bereich von paar 10 ns). Gruß Öletronika
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.