Hallo zusammen, wie schon oft besprochen in diesem Forum habe auch ich die eine oder andere Frage bezüglich Aufbau und Design eines BLDC- Controllers. Im Forum konnte ich leider kein Projekt finden, dass ebenfalls mit einer Spannung von 44V (12S- LiPo) realisiert wurde, desswegen ein neuer Eintrag. Mit diesem Controller möchte ich gerne einen Brushlessmotor betreiben und bin mir nicht ganz sicher, ob meine Schaltung zu 100% stimmt, bzw. hat jemand schon Erfahrungen mit Eigendesign gesammelt und vielleicht noch einen Tip für mich. Wo ich mir nicht ganz sicher bin, ist die BEMF- Schaltung, da ich beim Spannungsteiler nicht sagen kann wie hoch die Selbstinduktionsspannung sein wird, und ob das überhaupt so gesagt werden kann, ohne vorher Messungen am Motor zu machen. Ich habs mal so ausgelegt, dass es Spannungen bis max. 50V sein können, so sieht der Controller die maximalen 5V am Comparator. Des Weiteren bin ich mir nicht sicher ob es reicht wenn ich die High- Side FET's via PWM ansteuere und die LOW- side nicht, bzw. die einfach auf Masse ziehe. Im Anhang liegt das .pdf meiner Schaltung bei. Der Motor der verwendet werden soll ist der hier: http://hobbyking.com/hobbyking/store/__18184__Turnigy_Aerodrive_SK3_6374_149kv_Brushless_Outrunner_Motor.html Ich währe froh wenn mir jemand ein Feedback dazu geben könnte oder noch ein Tip auf Lager hat. Danke und Gruss, Andi
Wird die Selbst-Induktionsspannung nicht von der B6 Brücke begrenzt? Weil die MOSFETs haben ja alle Body-Dioden die dann leiten (Rückspeisen in Zwischenkreis) und die Spannung begrenzen. Also passt deine Auslegung. Falls du noch n Brems-Chopper drin hast der höhere DC Spannungen zulässt würde ich die Spannungsteiler auf diese höhere Spannung auslegen.
Rrrrespeeeekt, eine neue Dimension der Unleserlichkeit. Ich sag nur N$9, N$10. N$31 ist auch schön. Ein gut gemeinter Tipp: Bei der Anordnung der Pins an einem Schaltplansymbol muss man sich nicht an die Reihenfolge der Pinnummerierung halten. Nach Funktion gruppieren. Und "Art.Nr. 810586" als Bauteiltyp ist auch nicht hilfreich. Ich bin ein Verfechter davon, Signale als Linien zu zeichnen. Nur da, wo es die Lesbarkeit erhöht (!) werden Verbindungen mittels Labels eingesetzt. Da muss beim Schaltplanzeichnen halt ein bischen mehr Arbeit investiert werden.
Oke. Besser so? die Art- Nummern gibt man bei https://www.distrelec.de/home ein und hat alle Infos zusammen.
Ich kenne mich ja da nich so aus, aber alle Schaltungen die ich so gesehen habe, und auch meine eigene, die haben da keine 4 Transistoren und massenhaft Widerstände usw. in jeder Halbbrücke. Scheinbar habe ich genau so schlechte Augen wie mawin, erkenne da nicht mal was das für Treiber sind, aber alle Treiber die ich bis jetzt gesehen habe, hatten die Diode irgendwie nicht nach Masse sondern nach VCC.
@conquistador: Die 4 Transistoren sind je zwei parallel geschaltene high- und low- side Treiber einer jeweiligen Phase, macht das Sinn für dich? Wegen dem "schlecht leserlich" die angehängte Datei ist ein .pdf, kann runtergeladen und geöffnet werden. So kannst du jeden einzelnen Buchstaben mit "zoom" auf Bildschirmgrösse anpassen und dann hoffentlich auch lesen! Aber für dich gerne: die Treiber heissen IR2181 und wenn du dann das Datenblatt studiert hast, weisst du weshalb die Diode so reinkommt. Ich kann dich drauf hinweisen, aber auch noch für dich das Datenblatt vorlesen leider nicht.
kleiner Nachtrag, die "massenhaft Widerstände" sind deshalb, weil man was vernünftiges möchte und nicht die "alles- weg- gespaart"- Ware aus China. Abgesehen davon kannst du dir vorstellen dass ein RC- Motor der mit 44V läuft auch eine gewisse Leistung hat. Und da sollte man dem Ganzen schon eine anständige Ansteuerung spendieren.
In der Bootstrap-Schaltung würde ich auf jeden fall noch einen Widerstand in Serie zur Diode vorsehen, bzw. einen dimensionieren und einbauen. Weil "Diode-direkt" führt zu einem unnötig hohen Ladestrom. Dazu gibts ein App-Note von IR
Und Ref Speed würde ich so ändern dass im Fehlerfall (Poti nicht bestückt, oder falls extern abgerissen) sich ein Wert für 0 Drehzahl ergibt.
Kannst du mir die ap note Nummer sagen? ich hab das Datenblatt durchgeschaut und die ap note "an- 978" und nichts mit nem Widerstand in Serie gefunden.
Okay, das Schema habe ich angepasst, einen Widerstand von 1Mohm der den ADC- Eingang aus Masse zieht bei Leitungsbrucht, danke guter Tip ;-)
So, nun sollte es keine unbeschrifteten Bauteile mehr geben. Wo ich mir immer noch nicht sicher bin ist bei der BEMF- Schaltung, hat jemand schon einmal die BEMF von einem BLDC- Regler für 12S ausgemessen und kennt die Widerstandswerte? Ich weiss dass die induzierte Spannung an der BEMF abhängig von der Drehzahl ist, das heisst umso langsamer der Motor dreht, umso kleiner ist diese Spannung. Nun ist es so, dass mein Motor eine Mindestdrehzahl von knapp 50Hz hat (das sind bei 9 Polpaaren ca. 333 1/min) was untypisch für einen Modellbaumotor dieser Art ist.
maaa schrieb: > Wird die Selbst-Induktionsspannung nicht von der B6 Brücke begrenzt? > Weil die MOSFETs haben ja alle Body-Dioden die dann leiten (Rückspeisen > in Zwischenkreis) und die Spannung begrenzen. > Also passt deine Auslegung. Falls du noch n Brems-Chopper drin hast der > höhere DC Spannungen zulässt würde ich die Spannungsteiler auf diese > höhere Spannung auslegen. Ah ja stimmt, das heisst die Spannung am Spannungsteiler kann maximal die Nennspannung + Diode Vorwärtsspannung betragen, was noch leicht unter 50V ist. Nur weiss ich nicht wie gross die Spannung sein wird wenn der Motor ganz langsam dreht. Das muss ich dann wohl messen und den Spannungsteiler eventuell anpassen.
Andi K. schrieb: > Nur weiss ich nicht wie gross die Spannung sein wird wenn der Motor ganz > langsam dreht. Unter 1000 U/min habe ich noch nie irgend was sinnvolles aus so einem Murks rauskommen sehen. Wieso kopierst du nur diesen 0-8-15 Dreck und machst was vernünftiges ? - Was sollen die LEDs an der Ausgangsstufe? Die sterben schneller als du schauen kannst - Wieso bennenst du Netze so beschissen? - Warum verwendest du galvanisch isolierte DC/DC Wandler und hast dann keine galvanische Isolierung an der Treiberstufe ?! Was ist das denn für ein Schrott ? Andi K. schrieb: > die Art- Nummern gibt man bei > https://www.distrelec.de/home ein und hat alle Infos zusammen. Diese Besserwisserkommentare kannst du dir an Hut stecken. Du willst was von uns und nicht wir was von dir. Also gewöhn dir einen gewissen Respekt an und spar dir solche Kommentare. Wenn du faul bist hilft dir keiner. Vergleiche Stichwort Netiquette
...was ist denn mit dir nicht I.O? Wenn du mir nicht helfen willst dann lass es und verstreu keine Miesmacherkommentare! Tut mir ja leid dass ich mich erst seit vier Wochen damit beschäftige, tut mir leid dass ich kein Master in Eltech habe, aber was denkst du wieso Leute in diesem Forum um Hilfe bitten? GERADE WEIL SIE NICHT SO SUPERTOLL WIE DU SIND! Also kratz bitte noch den letzten Rest Sozialkompetenz zusammen den du (hoffentlich) noch hast und bleib anständig! Was den "zusammen kopierten 0-8-15 Dreck" angeht, die Grundlagen dazu habe ich aus dem Wiki von Mikrocontroller. Also wenn du jemanden anschnauzen möchtest, dann doch derjenige der das ins Wiki geschrieben hat. Ich behalte mir das Recht vor auf die "Fragen" in deiner Hassrede nicht einzugehen, da ich mir einen anständigen Umgang gewohnt bin und den versuche auch zu pflegen. Abgesehen davon scheinst du mir nicht sonderlich Ahnung von High- Side Treibern zu haben, so wie du beschreibst wie mir die LED's abrauchen sollen... dir scheint nicht klar zu sein dass U_GS vom High- Side- FET max 15V ist und da die LED parallel zu Gate- Source geschalten ist, sie auch nicht mehr als 15V sehen wird... Gruss, Andi
Mir ist nicht klar, warum du nicht die OC Ausgangspärchen des Mega168 benutzt. Das wären PD5 und PD6 für die erste Phase, PB1 und PB2 für Phase 2 und PB3 und PD5 für Phase Nummer 3. Das erleichtert die Ansteuerung mit PWM ganz erheblich und erfordert so gut wie keine Hardware ausser den Treiber IC zwischen MC und Endstufe. Die Schaltung mit dem HC08 ist ein Shutdown? M.E. kann das auch der Prozessor erledigen, wenn die Ausgänge pulldowns besitzen und er die Ausgänge hochohmig schaltet. Ich vermisse eine Strommessung. Und ein externer Oszillator ist schön, aber da du sowieso beide Osc. Pins frei hast, tut es da auch ein einfacher Quarz. Ich empfehle dir, mal Application Note AVR444 zu lesen: http://www.atmel.com/Images/doc8012.pdf und die Pläne zum MC100 Motorcontrol Board.
Andi K. schrieb: > Abgesehen davon scheinst du mir nicht sonderlich Ahnung von High- Side > Treibern zu haben, so wie du beschreibst wie mir die LED's abrauchen > sollen... dir scheint nicht klar zu sein dass U_GS vom High- Side- FET > max 15V ist und da die LED parallel zu Gate- Source geschalten ist, sie > auch nicht mehr als 15V sehen wird... Moin Zusammen, ich muss auch mal meinen Senf dazugeben. Die LEDs sind an den Gates Grundsätzlich nicht gut. Überlegs dir genau. Deine Highside wird während des Einschaltens von einem 100nF Cap versorgt. 100nF bei 1k1 Vorwiderstand ist 1µS. Bei 20kHz PWM Frequenz bist du bei 50µs Periode. Dh. bei einem Duty von 2% sinkt deine U_GS der Highside auf ca. 9 Volt, bei 10% Duty bist du auf jeden Fall unter deiner U_th der Highside Fets. Zum Anderen die LEDs wären ohne Z Dioden an den Gates wahrscheinlich wirklich gestorben. Den Treiber und Gate mit Gate Widerstand bilden einen Schwingkreis. (Leitungsinduktivität, Widerstand, Gatekapazität) Die Dämpfung dieses Kreises machst du über den R. Welche PWM Frequenz willst du überhaupt fahren. Danach sollte man auch die Flankensteilheit der Gatespannung und die Totzeit dimensionieren. Außerden würde ich bei deinem Bootstrapcap mindestens einen 1µF Kerko nehmen. Zuviel Kapazität schadet dort nie. Außerdem musst du bei einer BL Maschine wie dem 6374 bei 44V und 192rpm/V mit 8500rpm an der Welle bei 7 Polparen also 60krpm elektrisch rechnen dh. 1kHz Feldfrequenz. Davon ausgehend das du 100% PWM fahren willst musst du ein Drittel mit dem Bootstrap durch halten also 333µs, da willst du keine Last in der Gatebeschaltung, die Leckströme sind so schon hoch genug. Du siehst da kann alles ganz einfach gehen, deine jetzige Schaltung wird sicher auch so funktionieren, aber mit diversen Einschränkungen. Und Mit Verlaub: die Holger Regler von Mikrokopter, sind zwar recht einfach gebaut aber eher Spielzeug. Noch was zu BMF Schaltung. Dir kommt es nur auf den Nulldurchgang an. du brauchst folglich nicht wissen was bei 44V los ist. Also Widerstand und Z_Diode direkt an die Phase. Dann von der Z_Diode das normale Netzwerk, Und lieber niederohmiger als zu hochohmig. 1mA oder besser 10mA können dabei 44V an der Phase schon laufen. Stört ja nicht, im gegenteil macht die Erkennung robuster. Gruß Tec
Matthias Sch. schrieb: > Mir ist nicht klar, warum du nicht die OC Ausgangspärchen des Mega168 > benutzt. Das wären PD5 und PD6 für die erste Phase, PB1 und PB2 für > Phase 2 und PB3 und PD5 für Phase Nummer 3. > Das erleichtert die Ansteuerung mit PWM ganz erheblich und erfordert so > gut wie keine Hardware ausser den Treiber IC zwischen MC und Endstufe. Die externe Beschaltung der Gates mit nur einem PWM Kanal erlaubt mir das Ganze mir nur einem Timer/ Counter zu erledigen. So kann ich weitere Counter später noch für andere Dinge wie Drehzahlregelung benutzen. Das steht so übrigens auch in der AP- Note AVR444 auf Seite 6. > Die Schaltung mit dem HC08 ist ein Shutdown? M.E. kann das auch der > Prozessor erledigen, wenn die Ausgänge pulldowns besitzen und er die > Ausgänge hochohmig schaltet. Ebenfalls auf Seite 6 ist die Rede von einem Pull- Down Widerstand am PWM- Kanal, So kann beim Aufstarten der Schaltung kein high- side Ausgang durchsteuern. > > Ich vermisse eine Strommessung. Und ein externer Oszillator ist schön, > aber da du sowieso beide Osc. Pins frei hast, tut es da auch ein > einfacher Quarz. Ja die Strommessung habe ich mir überlegt. Im ersten Schritt möchte ich diese jedoch weglassen und evt., später in der Zuleitung einbauen und via Interrupt den AVR tripen lassen. > > Ich empfehle dir, mal Application Note AVR444 zu lesen: > http://www.atmel.com/Images/doc8012.pdf > und die Pläne zum MC100 Motorcontrol Board. Boarddaten habe ich leider keine gefunden. Gruss Andi
Ohne mich jetzt hier eingelesen zu haben: Habe vor ein paar Monaten das exakt gleiche gemacht, nur für 4S. Was sich auf alle Fälle mal lohnt zum lesen: http://www.mikrocontroller.net/articles/Brushless-Controller_f%FCr_Modellbaumotoren
Helper schrieb: > Ohne mich jetzt hier eingelesen zu haben: > > Habe vor ein paar Monaten das exakt gleiche gemacht, nur für 4S. > > Was sich auf alle Fälle mal lohnt zum lesen: > http://www.mikrocontroller.net/articles/Brushless-Controller_f%FCr_Modellbaumotoren Danke, habe ich gelesen, aber genau das war der Grund weshalb ich einen neuen Eintrag gemacht habe, weil ich keine Einträge mit 44V gefunden habe ;-) Gruss, Andi
Tec Nologic schrieb: > Andi K. schrieb: >> Abgesehen davon scheinst du mir nicht sonderlich Ahnung von High- Side >> Treibern zu haben, so wie du beschreibst wie mir die LED's abrauchen >> sollen... dir scheint nicht klar zu sein dass U_GS vom High- Side- FET >> max 15V ist und da die LED parallel zu Gate- Source geschalten ist, sie >> auch nicht mehr als 15V sehen wird... > > Moin Zusammen, > > ich muss auch mal meinen Senf dazugeben. Die LEDs sind an den Gates > Grundsätzlich nicht gut. Überlegs dir genau. Deine Highside wird während > des Einschaltens von einem 100nF Cap versorgt. 100nF bei 1k1 > Vorwiderstand ist 1µS. Bei 20kHz PWM Frequenz bist du bei 50µs Periode. > Dh. bei einem Duty von 2% sinkt deine U_GS der Highside auf ca. 9 Volt, > bei 10% Duty bist du auf jeden Fall unter deiner U_th der Highside Fets. Okay, da habe ich wohl das Datenblatt des Treibers nicht sichtig verstanden. Macht allerdings Sinn jetzt wo mans weiss ;-) Die LED's habe ich gestrichen und werde die Leiterbahnen vom Treiber zum Gate so breit und so kurz wie möglich machen. > > Zum Anderen die LEDs wären ohne Z Dioden an den Gates wahrscheinlich > wirklich gestorben. Den Treiber und Gate mit Gate Widerstand bilden > einen Schwingkreis. (Leitungsinduktivität, Widerstand, Gatekapazität) > Die Dämpfung dieses Kreises machst du über den R. Das verstehe ich nicht ganz, wieso genau knallts mir die LED's durch? So wie ich das verstanden habe erzeugt der Treiber eine Spannung die um die Versorgungsspannung (+15V) plus der Spannung an der jeweiligen Phase höher ist. Also besteht doch eine max. Spannungsdifferenz U_GS von 15V? Verwechsle ich da was? > > Welche PWM Frequenz willst du überhaupt fahren. Danach sollte man auch > die Flankensteilheit der Gatespannung und die Totzeit dimensionieren. ich habe an 20kHz gedacht, da diese Frequenz über der höhrbaren des Menschen ist und somit nicht stört. > > Außerden würde ich bei deinem Bootstrapcap mindestens einen 1µF Kerko > nehmen. Zuviel Kapazität schadet dort nie. Außerdem musst du bei einer > BL Maschine wie dem 6374 bei 44V und 192rpm/V mit 8500rpm an der Welle > bei 7 Polparen also 60krpm elektrisch rechnen dh. 1kHz Feldfrequenz. Wie kommst du auf 7 Polpaare? Der obige Link sollte eine Maschine anzeigen die 149k/V hat und 18T also 9 Polpaare. Rechnerisch gleicht sich der Fehler jedoch aus, wenn ich das richtig verstanden habe. Feldfrequenz nur leicht über 1kHz bei geladenem Akku. > Davon ausgehend das du 100% PWM fahren willst musst du ein Drittel mit > dem Bootstrap durch halten also 333µs, da willst du keine Last in der > Gatebeschaltung, die Leckströme sind so schon hoch genug. > > Du siehst da kann alles ganz einfach gehen, deine jetzige Schaltung wird > sicher auch so funktionieren, aber mit diversen Einschränkungen. > > Und Mit Verlaub: die Holger Regler von Mikrokopter, sind zwar recht > einfach gebaut aber eher Spielzeug. Bis anhin habe ich noch keine Schaltung gesehen die viel anders aufgebaut ist, daher bin ich davon ausgegangen dass man das so macht für Motoren dieser Art. Wenn du etwas besseres hast dann gerne ;-) > > Noch was zu BMF Schaltung. Dir kommt es nur auf den Nulldurchgang an. du > brauchst folglich nicht wissen was bei 44V los ist. Also Widerstand und > Z_Diode direkt an die Phase. Dann von der Z_Diode das normale Netzwerk, > Und lieber niederohmiger als zu hochohmig. 1mA oder besser 10mA können > dabei 44V an der Phase schon laufen. Stört ja nicht, im gegenteil macht > die Erkennung robuster. > Meine BEMF- Schaltung habe ich nun angepasst, bin mir aber nicht sicher ob du es so gemeint hast. Die RC- Schaltung ist ein Tiefpass und hat die Grenzfrequenz von 339Hz, was deutlich unter den 20kHz von der PWM liegt. Das sollte mir also eine gute Dämpfung geben. Die Frage ist nur ob das auch bei kleinen Spannungen geht, da die Z- Diode ja einen Mindeststrom braucht. Ansonsten erhöht sich die Zenerspannung aufgrund des Differentiellen Widerstandes. Da ich den Motor auch bei einer Feldfrequenz von 50HZ (also 330rpm) betreiben möchte wird das wohl nicht so simpel zu lösen sein. Falls das also Problematisch sein soll, kann ich dem mit Hallsensoren entgegen wirken? Weiter noch die Sache mit der Treiberansteuerung via PWM. Laut AVR444 Ap- Note braucht man 6 UND- Gatter um high- und low- side gleichermassen anzusteuern. Ich habe aber auch gelesen es geht mit 3, wenn ich nur die high- Seite takte und die low- Seite jeweils durchschalte. Was meint ihr dazu? was funktioniert und was nicht? Gruss, Andi
Andi K. schrieb: > Das verstehe ich nicht ganz, wieso genau knallts mir die LED's durch? So > wie ich das verstanden habe erzeugt der Treiber eine Spannung die um die > Versorgungsspannung (+15V) plus der Spannung an der jeweiligen Phase > höher ist. > Also besteht doch eine max. Spannungsdifferenz U_GS von 15V? Verwechsle > ich da was? Weil das Gate überschwingt weshalb man bei Leistungselektronik Baugruppen dort gern eine Z-Diode spendiert. Also direkt vom Gate zur Source. Die schützt dann den Fet. An zu hoher U_GS sterben die Fets sehr schnell. >Wie kommst du auf 7 Polpaare? Der obige Link sollte eine Maschine >anzeigen die 149k/V hat und 18T also 9 Polpaare. >Rechnerisch gleicht sich der Fehler jedoch aus, wenn ich das richtig >verstanden habe. Feldfrequenz nur leicht über 1kHz bei geladenem Akku. Ok hatte mich in der Maschine vertan. >Bis anhin habe ich noch keine Schaltung gesehen die viel anders >aufgebaut ist, daher bin ich davon ausgegangen dass man das so macht für >Motoren dieser Art. Wenn du etwas besseres hast dann gerne ;-) Ich bezog mich dabei eher auf die Ansteuerung der Brücke. Bei der BEMF schaltung kenne ich auch nicht viele andere Varianten die auf die Comperatoren gehen. Eher die Sachen über ADC und dann Filtern. >Die RC- Schaltung ist ein Tiefpass und hat die Grenzfrequenz von 339Hz, >was deutlich unter den 20kHz von der PWM liegt. Das sollte mir also eine >gute Dämpfung geben. Die Frage ist nur ob das auch bei kleinen >Spannungen geht, da die Z- Diode ja einen Mindeststrom braucht. >Ansonsten erhöht sich die Zenerspannung aufgrund des Differentiellen >Widerstandes. >Da ich den Motor auch bei einer Feldfrequenz von 50HZ (also 330rpm) >betreiben möchte wird das wohl nicht so simpel zu lösen sein. >Falls das also Problematisch sein soll, kann ich dem mit Hallsensoren >entgegen wirken? Naja der Tiefpass macht dir bei 340Hz schon 45° Phase, das willst du nicht du musst höher mit der Frequenz ich würde mal 2kHz anpeilen. Dann musst für Leerlaufdrehzahlen zwar das Timing vor ziehen aber das musst du eher bei Blockkommutierung. >Weiter noch die Sache mit der Treiberansteuerung via PWM. >Laut AVR444 Ap- Note braucht man 6 UND- Gatter um high- und low- side >gleichermassen anzusteuern. Ich habe aber auch gelesen es geht mit 3, >wenn ich nur die high- Seite takte und die low- Seite jeweils >durchschalte. Was meint ihr dazu? was funktioniert und was nicht? Keine Gattermätzchen. Entweder 6 komplementäre PWMs (kann das der 168er?) oder du nimmst 3 PWM Ausgänge und z.b. IR2104 mit einem Eingang und einem SD Pin, damit du die Phase abschalten kannst zum BEMF messen. Um die BEMF besser zu messen kannst du auch Synchon samplen. Also den Komperator Wert nur im Overflow int der PWM aus zu lesen Wenn diese Symmetrisch läuft also up-down dann kannst in der Spitze sampeln, ist zeitlich genau genug, und störungs arm. Da du samplest wenn eine Phase auf 44V und eine auf 0V liegt. Gruß Tec
Tec Nologic schrieb: > Andi K. schrieb: >> Das verstehe ich nicht ganz, wieso genau knallts mir die LED's durch? So >> wie ich das verstanden habe erzeugt der Treiber eine Spannung die um die >> Versorgungsspannung (+15V) plus der Spannung an der jeweiligen Phase >> höher ist. >> Also besteht doch eine max. Spannungsdifferenz U_GS von 15V? Verwechsle >> ich da was? > > Weil das Gate überschwingt weshalb man bei Leistungselektronik > Baugruppen dort gern eine Z-Diode spendiert. Also direkt vom Gate zur > Source. Die schützt dann den Fet. An zu hoher U_GS sterben die Fets sehr > schnell. Gut, dann werd ich den Gates auch so ne Diode spendieren. > >>Wie kommst du auf 7 Polpaare? Der obige Link sollte eine Maschine >>anzeigen die 149k/V hat und 18T also 9 Polpaare. >>Rechnerisch gleicht sich der Fehler jedoch aus, wenn ich das richtig >>verstanden habe. Feldfrequenz nur leicht über 1kHz bei geladenem Akku. > Ok hatte mich in der Maschine vertan. > >>Bis anhin habe ich noch keine Schaltung gesehen die viel anders >>aufgebaut ist, daher bin ich davon ausgegangen dass man das so macht für >>Motoren dieser Art. Wenn du etwas besseres hast dann gerne ;-) > Ich bezog mich dabei eher auf die Ansteuerung der Brücke. Bei der BEMF > schaltung kenne ich auch nicht viele andere Varianten die auf die > Comperatoren gehen. Eher die Sachen über ADC und dann Filtern. > >>Die RC- Schaltung ist ein Tiefpass und hat die Grenzfrequenz von 339Hz, >>was deutlich unter den 20kHz von der PWM liegt. Das sollte mir also eine >>gute Dämpfung geben. Die Frage ist nur ob das auch bei kleinen >>Spannungen geht, da die Z- Diode ja einen Mindeststrom braucht. >>Ansonsten erhöht sich die Zenerspannung aufgrund des Differentiellen >>Widerstandes. >>Da ich den Motor auch bei einer Feldfrequenz von 50HZ (also 330rpm) >>betreiben möchte wird das wohl nicht so simpel zu lösen sein. >>Falls das also Problematisch sein soll, kann ich dem mit Hallsensoren >>entgegen wirken? > > Naja der Tiefpass macht dir bei 340Hz schon 45° Phase, das willst du > nicht > du musst höher mit der Frequenz ich würde mal 2kHz anpeilen. Dann musst > für > Leerlaufdrehzahlen zwar das Timing vor ziehen aber das musst du eher bei > Blockkommutierung. Okay, pass ich auch an. > > >>Weiter noch die Sache mit der Treiberansteuerung via PWM. >>Laut AVR444 Ap- Note braucht man 6 UND- Gatter um high- und low- side >>gleichermassen anzusteuern. Ich habe aber auch gelesen es geht mit 3, >>wenn ich nur die high- Seite takte und die low- Seite jeweils >>durchschalte. Was meint ihr dazu? was funktioniert und was nicht? > > Keine Gattermätzchen. Entweder 6 komplementäre PWMs (kann das der > 168er?) oder du nimmst 3 PWM Ausgänge und z.b. IR2104 mit einem Eingang > und einem SD Pin, damit du die Phase abschalten kannst zum BEMF messen. Wieso sollte das mit dem Gatter eine schlechte Sache sein? das Gewicht spielt keine Rolle und das bisschen mehr Geld auch nicht :D Das Problem ist hald wenn ich alles mit 3 PWM's machen möchte, habe ich keine Timer mehr für andere Aufgaben. Und da die 3 PWM's sowieso alle Synchron arbeiten kann ich das auch mit einer UND- Verknüpfung erledigen. Beim IR2104 gefällt mir der schwache Ausgangsstrom für die geiden Gates nicht sonderlich, das gibt nicht mehr so ne steile Flanke :-/ > > Um die BEMF besser zu messen kannst du auch Synchon samplen. Also den > Komperator Wert nur im Overflow int der PWM aus zu lesen Wenn diese > Symmetrisch läuft also up-down dann kannst in der Spitze sampeln, ist > zeitlich genau genug, und störungs arm. Da du samplest wenn eine Phase > auf 44V und eine auf 0V liegt. Das hatte ich auch so vor, zumal stehts so auch im Wiki geschrieben. Gruss, Andi
Andi K. schrieb: > Wieso sollte das mit dem Gatter eine schlechte Sache sein? das Gewicht > spielt keine Rolle und das bisschen mehr Geld auch nicht :D Das Problem > ist hald wenn ich alles mit 3 PWM's machen möchte, habe ich keine Timer > mehr für andere Aufgaben. Und da die 3 PWM's sowieso alle Synchron > arbeiten kann ich das auch mit einer UND- Verknüpfung erledigen. > Beim IR2104 gefällt mir der schwache Ausgangsstrom für die geiden Gates > nicht sonderlich, das gibt nicht mehr so ne steile Flanke :-/ Ok ich arbeite zulange mit größeren Prozessoren. eine PWm auf n Und Gatter sollte es dann doch sein. Oder n kleiner STM32, aber mach das mit dem Prozi der dir gefällt, Leistungsmäßig reicht der AVR auch. Sonst siehts erst mal gut aus. Ansonsten gilt speziell bei Leistungselektronik, "Elektronik funktioniert nur mit Rauch, wenn der Rauch entweicht ists kaputt".
Andi K. schrieb: >>>Weiter noch die Sache mit der Treiberansteuerung via PWM. >>>Laut AVR444 Ap- Note braucht man 6 UND- Gatter um high- und low- side >>>gleichermassen anzusteuern. Ich habe aber auch gelesen es geht mit 3, >>>wenn ich nur die high- Seite takte und die low- Seite jeweils >>>durchschalte. Was meint ihr dazu? was funktioniert und was nicht? >> >> Keine Gattermätzchen. Entweder 6 komplementäre PWMs (kann das der >> 168er?) oder du nimmst 3 PWM Ausgänge und z.b. IR2104 mit einem Eingang >> und einem SD Pin, damit du die Phase abschalten kannst zum BEMF messen. > > Wieso sollte das mit dem Gatter eine schlechte Sache sein? das Gewicht > spielt keine Rolle und das bisschen mehr Geld auch nicht :D Das Problem > ist hald wenn ich alles mit 3 PWM's machen möchte, habe ich keine Timer > mehr für andere Aufgaben. Und da die 3 PWM's sowieso alle Synchron > arbeiten kann ich das auch mit einer UND- Verknüpfung erledigen. > Beim IR2104 gefällt mir der schwache Ausgangsstrom für die geiden Gates > nicht sonderlich, das gibt nicht mehr so ne steile Flanke :-/ Bei PWM-Ausgängen geht es um die Totzeit, sie man zwischen dam ausschalten und Einschalten der high- und Low-Side einfügen sollte. Sonst hast du bei jedem Kommutieren einen Kurzschluss über die FETs. Deswegen fügt man eben eine Totzeit ein, um sicherzustellen, dass der FET, der gerade ausgeschaltet wurde hochohmig genug ist um nicht durch zu brennen (oder den Akku zu überlasten, ...). Wenn dir die PWM-Kanäle des ATMega nicht reichen, musst du halt was größeres einsetzen, Mega32, XMega (leider 3,3V aber können die Totzeit direkt erzeugen) oder direkt einen Cortex.
> Bei PWM-Ausgängen geht es um die Totzeit, sie man zwischen dam > ausschalten und Einschalten der high- und Low-Side einfügen sollte. > Sonst hast du bei jedem Kommutieren einen Kurzschluss über die FETs. > > Deswegen fügt man eben eine Totzeit ein, um sicherzustellen, dass der > FET, der gerade ausgeschaltet wurde hochohmig genug ist um nicht durch > zu brennen (oder den Akku zu überlasten, ...). > > Wenn dir die PWM-Kanäle des ATMega nicht reichen, musst du halt was > größeres einsetzen, Mega32, XMega (leider 3,3V aber können die Totzeit > direkt erzeugen) oder direkt einen Cortex. Okay das macht durchaus Sinn was du da schreibst. Das kann man aber auch programmtechnisch so machen, dass man ein Delay einfügt bevor man low- side schaltet. Mit grösseren AVR's kenn ich mich leider zu wenig aus. Gruss, Andi
Tec Nologic schrieb: > Ok ich arbeite zulange mit größeren Prozessoren. eine PWm auf n Und > Gatter sollte es dann doch sein. Oder n kleiner STM32, aber mach das mit > dem Prozi der dir gefällt, Leistungsmäßig reicht der AVR auch. Danke, werde ich beherzen! > > Sonst siehts erst mal gut aus. Ansonsten gilt speziell bei > Leistungselektronik, "Elektronik funktioniert nur mit Rauch, wenn der > Rauch entweicht ists kaputt". :D kenn ich, ich arbeite mit VSD's im Mittelspannungsbereich (bis 6kV Motorenspannung und 7MVA) - Elektronik ist quasi mein Hobby - und glaub mir, da rauchts dann richtig :D
So nun habe ich das Schema nochmals angepasst. Die Sache mit der PWM- Beschaltung entnehme ich der AVR444 Ap- Note. So spare ich mir zwei Timer und zwei Pins, ebenfalls entlaste ich den uC etwas. Weiters habe ich den Gates jeweils eine Z- Diode gespendet um Überschwinger grösser 18V abzufangen. Ebenfalls habe ich in der BEMF noch einen provisorischen Spannungsteiler eingebaut, ob und wie ich den bestücken werde muss ich wohl in Versuchen ermitteln da mir Motordaten fehlen. Falls noch Einwände oder Ideen vorhanden wären, nur her damit ;-) Gruss, Andi
Angehängte Dateien:
-

Mc100_4_4.jpg
6,6 KB
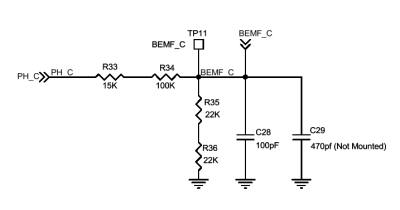
Mach aus L1 eine 100µH und aus C10 einen 100nF. AREF solltest du wirklich nicht an +5V anschliessen, du verbaust dir dauerhaft die Möglichkeit einer anderen Referenzspannung. Am besten blockst du den AREF Eingang nur mit einem anderen 100nF gegen Masse ab und wählst per Software die Referenz. R13 - R15 erscheinen mir sehr klein. Du musst bei deinem Motor mit bis zu 100V Back EMF rechnen und trotzdem den Querstrom durch die Zenerdioden nicht überschreiten. Schon Atmel hat bei dem Lullermotor (18-24V) des MC100 Vorwiderstände von 115k in der oberen Hälfte des Spannungsteilers und 44k in der unteren Hälfte. Falls du den Plan nicht hast, habe ich dir mal den entsprechenden Auszug angehängt. Andi K. schrieb: > Weiters habe ich den Gates jeweils eine Z- Diode gespendet um > Überschwinger grösser 18V abzufangen. Wenn der Gatetreiber kräftig genug ist, um die Gates zügig zu laden und zu entladen, sind die gar nicht nötig. Selbst bei unseren 48V/4kW Motoren sind die Gates sauber und frei von Überschwingern, solange die Versorgung der Treiber kräftig genug und sauber abgeblockt ist.
Matthias Sch. schrieb: > Mach aus L1 eine 100µH und aus C10 einen 100nF. AREF solltest du > wirklich nicht an +5V anschliessen, du verbaust dir dauerhaft die > Möglichkeit einer anderen Referenzspannung. Am besten blockst du den > AREF Eingang nur mit einem anderen 100nF gegen Masse ab und wählst per > Software die Referenz. Das stimmt, werde ich so machen, bei so eine Schaltung kommt es wohl zu grösseren Störungen im Netz, da ists doch besser man nimmt ein grösseres L. > R13 - R15 erscheinen mir sehr klein. Du musst bei deinem Motor mit bis > zu 100V Back EMF rechnen und trotzdem den Querstrom durch die > Zenerdioden nicht überschreiten. Wie kommst du auf die 100V? Erfahrungswert? > Schon Atmel hat bei dem Lullermotor (18-24V) des MC100 Vorwiderstände > von 115k in der oberen Hälfte des Spannungsteilers und 44k in der > unteren Hälfte. > Falls du den Plan nicht hast, habe ich dir mal den entsprechenden Auszug > angehängt. Was ich jetzt nicht weiss ist, ob der "BEMF_C" direkt auf den AVR geht oder noch eine Schaltung dran hängt. Denn rein rechnerisch, wäre die Spannung an diesem Pin 6.6V wenn ich mit einer BEMF- Spannung von 24V rechne und somit etwas zu viel für den AVR. jetzt habe ich das doppelte der Betriebsspannung, wieso meinst du habe ich dann bis zu 100V BEMF? steigt dieses Verhältnis nicht proportional an? Und bekomme ich das mit so einer einfachen Schaltung überhaupt unter einen Hut, wenn ich einen Drehzahlbereich von 330rpm bis zu 6660rpm habe? > Wenn der Gatetreiber kräftig genug ist, um die Gates zügig zu laden und > zu entladen, sind die gar nicht nötig. Selbst bei unseren 48V/4kW > Motoren sind die Gates sauber und frei von Überschwingern, solange die > Versorgung der Treiber kräftig genug und sauber abgeblockt ist. Okay, gut zu wissen. Tec Nologic hat mir desswegen empfohlen welche an die Gates zu machen. Ich werde es mal im Layout berücksichtigen und dann hald schauen ob ich sie bestücken muss oder nicht, Das muss ich dann wohl messen. Gruss, Andi
Andi K. schrieb: > Okay, gut zu wissen. Tec Nologic hat mir desswegen empfohlen welche an > die Gates zu machen. Ich werde es mal im Layout berücksichtigen und dann > hald schauen ob ich sie bestücken muss oder nicht, Das muss ich dann > wohl messen. Moin, so ist gut :) Angstdiode vorsehen schadet nie. Wenn du eine ganz sauberen Aufbau hast, kannst sie weglassen, wird die Leitung zu den Fets etwas länger weil du das auf Lochraster aufbaust, dann brauchste sie. PS: Wegen den 100V BEMF du musst immmer bedenken die Motorwicklungen sind Induktivitäten, die Strom führen und das wollen die aufrechterhalten und schieben über die Body Dioden auf deinen Zwischenkreis. 100V finde ich da zwar auch etwas hoch, aber die Body Diode brauchen etwas Zeit um durchzulassen, da sind die Leitungsenden der Maschine offen und die Spannung Springt hoch. Gruß Tec
Tag :-) > PS: Wegen den 100V BEMF du musst immmer bedenken die Motorwicklungen > sind Induktivitäten, die Strom führen und das wollen die > aufrechterhalten und schieben über die Body Dioden auf deinen > Zwischenkreis. 100V finde ich da zwar auch etwas hoch, aber die Body > Diode brauchen etwas Zeit um durchzulassen, da sind die Leitungsenden > der Maschine offen und die Spannung Springt hoch. Das macht Sinn, naja, ich denke ich werde auch da den Widerstandteiler vorbereiten und die Pads für die Z- Dioden und die Caps (brauchen ja kaum Platz). Dann muss ich wohl auch da messen was dabei rauskommt. Gruss, Andi
Andi K. schrieb: > wieso meinst du habe > ich dann bis zu 100V BEMF? steigt dieses Verhältnis nicht proportional > an? Thoretisch hast du tatsächlich nur die 44V BEMF, aber durch ungünstige PWM Frequenz und Resonanzerscheinungen musst du schon mal mit ein wenig mehr rechnen. Da du sowieso AD Wandler benutzt, solltest du nur dafür sorgen, das der ADC bis zu den 44V nicht clippt, damit du die 'Wirk' BEMF auswerten kannst. Der Rest wird durch den hohen Widerstand des Spannungsteilers und die Schutzdioden des AVR gekappt. Deswegen sind auch C16 bis C18 wichig, und die könnten sogar noch einige 100nF parallel vertragen. Durch die Bodydioden und die Back-EMF fliesst eine Menge in und aus den Elkos, bei uns wurden billigere Typen schon mal richtig warm.
Matthias Sch. schrieb: > Thoretisch hast du tatsächlich nur die 44V BEMF, aber durch ungünstige > PWM Frequenz und Resonanzerscheinungen musst du schon mal mit ein wenig > mehr rechnen. Da du sowieso AD Wandler benutzt, solltest du nur dafür > sorgen, das der ADC bis zu den 44V nicht clippt, damit du die 'Wirk' > BEMF auswerten kannst. Der Rest wird durch den hohen Widerstand des > Spannungsteilers und die Schutzdioden des AVR gekappt. Okay, werde ich in dem Fall berücksichtigen > Deswegen sind auch C16 bis C18 wichig, und die könnten sogar noch einige > 100nF parallel vertragen. Durch die Bodydioden und die Back-EMF fliesst > eine Menge in und aus den Elkos, bei uns wurden billigere Typen schon > mal richtig warm. Aber wenn ich jetzt mehr Kapazität nehme, dann hab ich doch auch einen grösseren Phasenverschiebungswinkel? Oder spielt das keine Rolle? Oben hat mir Tec Nologic geraten diesen Winkel klein zu halten. Ich werde auf jeden Fall die Caps im Layout berücksichtigen, den Wert lässt sich ja dann beim Bestücken noch testen, zusammen mit den timing- Zeiten. Gruss, Andi
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.