Hallo leute bin neu hier. Hab ab und zu mal mitgelesen, aber nie was geschrieben. Ich habe letztens auf facebook dieses Video gesehen http://www.orschlurch.net/2014/09/21/coole-wanduhr/ Und habe mir überlegt ob man sowas nachbauen könnte. Ich hab keine Anleitung oder sonst was gefunden. Mein Plan bis jetzt ist 1. 135 Uhren kaufen die ähnlich ausschauen 2. Kleine Servomotoren oder doch Schrittmotoren 3. Steuerung mit einem Mikrocontroller? Habt ihr Ergänzungen oder sonstige Ratschläge?
Für 135 Uhren, die gleichzeitig muster erzeugen wird es mit !einem! Mikrocontroller etwas schwer. :) Vielleicht für jede Uhr oder für einzelne Gruppen einen Controller und dann alles von einem Raspberry Pi gesteuert.
Such Dir 135 Uhrwerke die Stunden und Minutenzeiger unabhängig bewegen können, manche Funkuhrwerke können das, und steuer die Motoren mit einem µC.
Jan B. schrieb: > Für 135 Uhren, die gleichzeitig muster erzeugen wird es mit !einem! > Mikrocontroller etwas schwer. Warum? Ein kleiner ATTiny sollte reichen, was soll der da groß zu rechnen haben?
Hoi Geiles ding aber hast du mal überschlagen was das ganze kosten würde? Alleine für die uhren zahlst du 100€. Dazu kommen selbst mit mengenrabatt sicher 1000€ für servos. Ob du die dann aber an die zeiger dranfrickeln kannst bezweifle ich.
Reichen da nicht die Servomotoren die im Modellbau verwendet werden. Da gibts schon welche für 2-4 Euro. Ich könnte ja auch einfach selber Zeiger bauen. Es müssen ja keine Uhren sein oder nicht? Im Endeffekt wird es ja eine "Digitaluhr".
Naja ich brauch für jede Zahl von 0-24 und 0-60 ein "Programm" plus die Muster. Sagen wir 3 Programme. Schafft das ein MC. Theoretisch bräuchte ich also um die 90 Ausgänge. Ich kenn mich mit SPS genug aus hab aber noch nie ein MC programmiert. Müsste aber ähnlich sein oder?
Speicher das Video ab, mach ne Endlosschleife, Beamer und Leinwand. fertig
Also, einen Raspberry halte ich da für Overkill. Je nach Antrieb der Uhren braucht man da, pro Uhr, ein paar Ausgänge, Eingänge für Referenzposition nicht vergessen, da sollte ein Controller, je nach Pin Anzahl, mindestens 2 Uhren 'versorgen' können. Dann noch einen Mikrocontroller als Master. Das Ganze läuft ja nicht beliebig schnell, da ist die Rechen-Power wohl nicht das Problem. Die Schwierigkeit wird eher sein, das Mechanik-Gebastel in erträglichen, und bezahlbaren, Grenzen zu halten. Gibt es da vielleicht was Fertiges, das man verwenden kann? Man sollte bedenken, daß bestimmte (Schritt-)Motor-Typen, die in Uhren verbaut werden, nur Vorwärts können. Wenn man da selbst Schrittmotoren (Servos halte ich hier nicht für die erste Wahl, könnten auch zu laut sein) an Uhrwerke basteln muß, hat man eine Menge Arbeit vor sich, und sollte Werkstattmäßig auch entsprechend eingerichtet sein. Mit freundlichen Grüßen - Martin
Uhr wie im Ham Yard Hotel in London schrieb: > Reichen da nicht die Servomotoren die im Modellbau verwendet werden Nein, Modellbauservos können etwa 180°, Du brauchst aber 360° oder um 12:30 ist der Tag zuende.
Oliver R. schrieb: > Nein, Modellbauservos können etwa 180°, Du brauchst aber 360° oder um > 12:30 ist der Tag zuende. ein 1:2 Getriebe und schon können sie 360° - ist doch nicht so schwer auch mal etwas weiter zu denken.
Peter II schrieb: > Oliver R. schrieb: >> Nein, Modellbauservos können etwa 180°, Du brauchst aber 360° oder um >> 12:30 ist der Tag zuende. > > ein 1:2 Getriebe und schon können sie 360° - ist doch nicht so schwer > auch mal etwas weiter zu denken. Man kann doch die Originalmotoren verwenden!
Es gab oder gibt Modellbauservos die kann man zu "endlos" Getrieben umbauen. Man muss ledigleich die Begrenzung am Hauptzahnrand abschneiden und den Poti vom Zahnrad trennen. Das ging damals aber nicht bei allen Servos so einfach. Einige hatten das Zahnrad fest mit dem Poti verbunden. Aber auch hier kann man das Poti soweit zerstören das es sich endlos drehen lässt. Als Poti-Ersatz müssen dann natürlich Ersatzwiderstände rein.
Weshalb müssen es Uhren sein? Zeiger und Servo reicht doch völlig. Das dürfte hier im Video nicht anders sein. Grüsse, René
Uwe Neubert schrieb: > Man kann doch die Originalmotoren verwenden! Denke ich auch schon die ganze Zeit. Rene H. schrieb: > Weshalb müssen es Uhren sein? Zeiger und Servo reicht doch völlig. Das > dürfte hier im Video nicht anders sein. Weil man ein elektronisches Uhrwerk, komplett mit Zeigern, aber ohne Ziffernblatt, selbst als Einzelstück für ungefähr 2€ kriegt. Außerdem ist die Ansteuerung einfacher, man braucht nur einen Taktimpuls pro Uhrwerk, der die Zeiger dann um jeweils eine Position weiterbewegt.
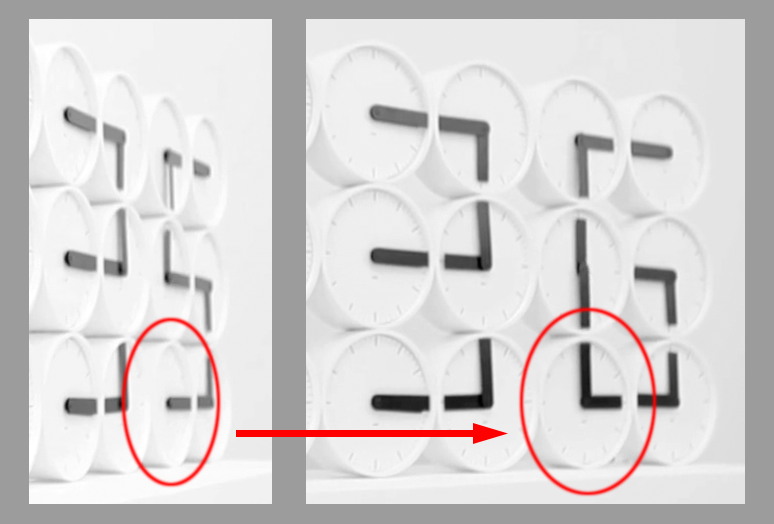
Bernd schrieb: > Weil man ein elektronisches Uhrwerk, komplett mit Zeigern, aber ohne > Ziffernblatt, selbst als Einzelstück für ungefähr 2€ kriegt. Außerdem > ist die Ansteuerung einfacher, man braucht nur einen Taktimpuls pro > Uhrwerk, der die Zeiger dann um jeweils eine Position weiterbewegt. Du meinst also, dass Du Minuten- und Stundenzeiger einer stinknormalen Uhr mit einem Taktimpuls unabhängig voneinander ansteuern kannst? Schau Dir das Video mal genauer an. Beide Zeiger einer jeden Uhr sind gleich lang und lassen sich unabhängig voneiner drehen. Ohne dies ist auch der ganze Witz hin.
Ich bin ja kein Experte was Uhren angeht. Aber es gibt fertige Uhrenwerke zu kaufen. Da würde ich an sowas denken: http://www.pollin.de/shop/dt/Nzk5OTIxOTk-/Haustechnik/Uhren_Zaehler/Uhren/Quarz_Uhrwerk_mit_2_Zeigersaetzen.html Evtl. Kann man so ein Teil für deine Zwecke umbauen? Dazu müsste man wissen wie es von innen aussieht.
Upps! Habe mir gerade das Video noch mal länger als nur die ersten paar Sekunden angeschaut. Vorher war mir gar nicht aufgefallen, dass sich die Zeiger unabhängig voneinander bewegen lassen. Damit fällt die Verwendung eines normales Uhrwerks allerdings flach.
Hier mal eine kleine Analyse von mir: Die Zeiger der Uhren sind gleich lang. Die Zeiger bewegen sich nicht mit einer Untersetzung von 12:1 zueinander, sondern unabhängig -> kein normales Uhrwerk. Die Zeiger laufen auch rückwärts. Ansteuerung jedes Zeigers mit Servo (Übersetzt 1:2) ist nicht möglich, da die Zeiger komplette Kreisbewegungen machen. Servoumbau auf gesamte Drehung hat den Nachteil, dass die Positionsrückmeldung fehlt -> muss wieder nachgerüstet werden. Nach meiner Ansicht müsste jeder Zeiger seinen eigenen Schrittmotor bekommen. Eventuell gibt es Uhrwerke welche 2 Schrittmotoren haben und auch rückwärts laufen können. Gruß JensM
Außerdem kann man sich die unterste Zeile sparen, somit 15 uhrenähnliche Werke weniger.
Ich hab da ein bisschen recherchiert, die Uhr basiert auf dem "a million times" - Konzept. Dieses wiederum verwendet anscheinend einen normalen, linearen Uhrenlauf. EDIT: Doch nicht - ganz am Anfang dreht sich alles synchron. http://www.humanssince1982.com/a-million-times Jetzt also nur noch hunderte Uhrwerke mit dem entsprechenden Takt füttern und los geht die wilde Fahrt ;)
Wie wärs erst mal mit in klein: https://vimeo.com/52798481 Da sieht man schön, das das normale Uhren sind. Auch was die Zeiger und Drehrichtung angeht.
Hans M. schrieb: > Da sieht man schön, das das normale Uhren sind. ein Zeiger auf 6:00Uhr und ein Zeiger auf genau 09:00Uhr... normale Uhren ??? runout
Hans M. schrieb: > Wie wärs erst mal mit in klein: > https://vimeo.com/52798481 > > Da sieht man schön, das das normale Uhren sind. Auch was die Zeiger und > Drehrichtung angeht. ... die etwas 4 Stunden pro Umdrehung des Minutenzeigers machen. Ganz normale Uhren sind das leider auch nicht...
Die Zeiger sind unabhängig steuerbar, das steht fest. Gibt es keine Schrittmotoren mit Hohlachse? Hab noch keinen gefunden :(
Die gleiche Diskussion gab's Ende letzten Jahren schon mal im Arduino Forum: http://forum.arduino.cc/index.php?topic=279453.0 Dort wird auf einen Steppermotor von Sonceboz mit zwei unabhängigen Achsen verwiesen: http://www.sonceboz.com/medias/Products/PDFs/datasheets%20V2/6407%20NEW.pdf Preis liegt (bei großen Stückzahlen) angeblich bei 4$, habe ich aber nicht überprüft.
hp-freund schrieb: > Die Zeiger sind unabhängig steuerbar, das steht fest. Ja. > Gibt es keine Schrittmotoren mit Hohlachse? Hab noch keinen gefunden :( Google mal nach "schrittmotor hohlwelle". Es gibt sie. Da kann man normalerweise Kabel durchführen. Also auch eine 2. Achse.
hp-freund schrieb: > Die Zeiger sind unabhängig steuerbar, das steht fest. Solche Uhren gibt es, allerdings nicht für 2 EUR.
Entgegen der Meinungen in den ca. ersten 10 Beiträgen ist diese Aufgabe nicht trivial. Die wenigsten hier sind in der Lage, das Projekt umzusetzen (und wenns nur am finanziellen Aspekt scheitert). Vor allem die Mechanik ist eine Herausforderung. Der TE, der nur mit SPS aber nicht mit Controller Erfahrung hat wird diese Aufgabe alleine nicht stemmen können.
Hier noch ein Anbieter von "Doppelschrittmotoren": http://www.microstep-motoren.de/index.php/de/produkte/sonderloesungen Datenblatt dazu findet man unten links auf der Seite oder hier direkt: http://www.microstep-motoren.de/images/datenblaetter/sonderloesungen/ubersicht_s3-1.pdf Muss man mal fragen, wieviel 288 Stück kosten ;-)
Die Stepper von sonceboz können keine 360 Grad! - wenn ich das Datenblatt richtig interpretiere.
JensM schrieb: > Hier mal eine kleine Analyse von mir: > > Die Zeiger der Uhren sind gleich lang. Hi, man sieht doch deutlichst, dass sie unterschiedlich lang sind..???? Gruß Uhrmacher
Swatch Musical können das. Fand ich immer geil wie das am Handgelenk aussah wenn man die Musik gespielt hat. https://www.youtube.com/watch?v=rk9TBLdag5s
Thomas Z. schrieb: > Die Stepper von sonceboz können keine 360 Grad! - wenn ich das > Datenblatt richtig interpretiere. Mindesten 305/310 grad, was will uns das sagen? Es wäre aber auch dumm wenn bestimmte Minuten oder gar Stunden nicht angezeigt werden ;-)
Noch mehr Exemplare davon gibt es bei http://victor-hunt.com/collection/serie/million-times# Aber: "price upon registration"
Dirk B. schrieb: > Aber: "price upon registration" Die 4*6er Uhr kostet 36.000 Euro. Dafür würde ich mich auch hinsetzen und eine bauen - oder zwei...
naja ne Swatch Musicall kostet so 50€. 4*6*50=1200€ noch die Elktronik für 20€. Würde ich für 5000€ verkaufen.
Peter II schrieb: > ein 1:2 Getriebe und schon können sie 360° - ist doch nicht so schwer > auch mal etwas weiter zu denken. Nicht so ideal. Wenn du von 11:59 auf 12:01 stellen willst, mußt du mit einem Servo incl. Getriebe die ganze Runde zurück, statt nur 2 Schritte zu machen. Sollte also was endlos drehendes sein. -- Ist doch nicht so schwer, auch mal etwas weiter zu denken, oder? ;-))
Hallo Wenn real aufgebaut würde ich DualStepper nehmen, an den zu lasern lassenden Zeigern Magnete anbringen, die ich mit einem Reed Kontakt zur Referenz abfrage und die Gehäuse aus Gaffel Kölsch Tabletts machen.Steuern mit einem ATMega mit kleinen Stepperleistungsteilen Gruss Otto
nachBauer schrieb: > Darf man so was eigentlich nachbauen und verkaufen? Nachbauen natürlich. Privat aufhängen klar. Verkaufen auf gar keinen Fall, außer mit Lizenz vom Designer.
Also erstmal danke an alle für eure Hilfe. Man könnte die Anzahl der Uhren auf 6x13 begrenzen dann hätte man nur die Zahlen, aber abgesehen vom elektronischen ist die mechanische Arbeit das Problem. Das einzige was machbar wäre ist die Zahlen in 7 segment anzeigen darzustellen und die Uhr dann entsprechend drehen. Die 12 muss ja nicht immer oben sein. Mit normalen Uhren kann man 3 Uhr, 9 Uhr und 6 Uhr problemlos darstellen dann hätte man alle Elemente um alle Zahlen darzustellen. Ich hoffe ihr versteht was ich meine :D Z.b. 3 Uhr könnte man dann links unten als Ecke nehmen und umgedreht rechts oben als Ecke Das wäre dann die "einfachere Version" für dieses Projekt, sieht aber dann auch nicht mehr so elegant aus.
Thomas Z. schrieb: > Die Uhr mit den 288 Uhren kostet 1.000 - pro Uhr Alter Schwede! Na dann weiß ich ja jetzt womit ich mich an langen Winterabenden beschäftigen kann wenn später mal die Rente knapp wird.
sind das wirklich mechanische Uhrwerke? Das könnten auch Displays sein. Dann ist die Ansteuerung einfacher.
scheint schon so zu sein, manchmal sind Schatten der Zeiger zu sehen. Ein großes Display mit aufgesetzen Ringen würde sicher auch funktionieren. Sascha
Schon unsere Vorväter hatten keine Probleme 100-te von Uhren, z.B. auf einem Bahnhof, zum Laufen zu bringen. Interessanterweise brauchten die dazu keine 100-te Zeitinformationen. Also nur einen 08/15 µP und einen oder zwei dicke Treiber. Auch kann man so ein System Schritt-für-Schritt aufbauen. Also erst mal eine Tick-Tack und dann, wenn es geht - eigentlich eine supersimple Angelegenheit - je nach Nachschub, Platz, Geld oder Zeit, kann man dann die eine oder andere hinzufügen. Erinnert mich ein Wenig an eine Lichterkette. Hat man die erste Lampe zum Leuchten überredet, sind die Hürden für die zweite richtig hoch.
so, ich werf auch noch einen rein: http://de.aliexpress.com/item/Glorification-original-vid28-05-instrument-motor-jac-yuet-with-micro-stepper-motor/1522796250.html?isOrig=true#extend Gute Nacht runout
Also der große Vorteil eines Raspberry Pis ist, dass der mit extrem wenig Aufwand NTP machen kann. Sprich man kann dann die Uhrzeit aus seiner NTP Infrastruktur holen und muss nicht nochmal zusätzlich den Aufwand eines DCF77 Empfängers betreiben.
Christian Berger schrieb: > Also der große Vorteil eines Raspberry Pis ist, dass der mit extrem > wenig Aufwand NTP machen kann. gerüchteweise soll das auch mit einem Arduino miniPRO und ESP8266 gehen für 1/3 des Preises. Ich habs noch nicht geschafft bin aber noch optimistisch.
Christian Berger schrieb: > Also der große Vorteil eines Raspberry Pis ist, dass der mit extrem > wenig Aufwand NTP machen kann. Sprich man kann dann die Uhrzeit aus > seiner NTP Infrastruktur holen und muss nicht nochmal zusätzlich den > Aufwand eines DCF77 Empfängers betreiben. Wenn die Uhr abseits des Netzwerkes laufen soll, kehrt sich dieses Argument genau ins Gegenteil um. Dann ist, zumindest im Versorgungsgebiet des DCF77-Senders, der Funkuhrbetrieb wesentlich einfacher zu realisieren als NTP. Gut, ggf. kämen auch noch WLAN oder Mobilfunknetzte in Frage.
>uhrmacher a.d. (Gast) >Nachbauen natürlich. Privat aufhängen klar. >Verkaufen auf gar keinen Fall, außer mit Lizenz vom Designer. Ist das wirklich so? Am Ende ist die Realisierung ja immer sehr individuell, sowohl die Mechanik als auch die Softwareanimationen sind einzigartig.
nachbauer schrieb: >>Nachbauen natürlich. Privat aufhängen klar. >>Verkaufen auf gar keinen Fall, außer mit Lizenz vom Designer. > > > Ist das wirklich so? > Am Ende ist die Realisierung ja immer sehr individuell, sowohl die > Mechanik als auch die Softwareanimationen sind einzigartig. Naja, auch für ähnliche Lösungen gibt es Schutz. Z.B. wurde die Webseite "e-online" kostenpflichtig abgemahnt, weil der Name ähnlich wie "t-online" klang.
Es gibt ja noch die 'Geschmacksmuster', berühmt geworden im Kampf Apple vs. Samsung: http://de.wikipedia.org/wiki/Eingetragenes_Design Thomas T. schrieb: > so, ich werf auch noch einen rein: > > http://de.aliexpress.com/item/Glorification-original-vid28-05-instrument-motor-jac-yuet-with-micro-stepper-motor/1522796250.html?isOrig=true#extend sehen von der Bauform her unglücklich aus weil die ja dicht aneinander gepackt werden müssen. Die sonceboz Motoren passen da eher, nur der interne Stop muss ausgebaut werden. Das alleine ist wohl schon eine Arbeit für lange Winterabende.
Jojo S. schrieb: > sehen von der Bauform her unglücklich aus Das Maß über die lange Seite ist aber gerade mal 64mm, bei geschickter Anordnung sollte das schon zu gebrauchen sein. Mit freundlichen Grüßen - Martin
Harald Wilhelms schrieb: > Naja, auch für ähnliche Lösungen gibt es Schutz. > Z.B. wurde die Webseite "e-online" kostenpflichtig abgemahnt, > weil der Name ähnlich wie "t-online" klang. Eine Abmahnung, gegen die man nicht vorgeht weil man das Kostenrisiko scheut, hat nichts mit Schutz zu tun und daß die Telekom hier ihre Macht als Großkonzern ausgespielt hat hat nichts mit Recht zu tun. Aber das ist ein anderes Thema.
Bei dem Nachbau der Worldclock hat mich auch keiner verklagt, also locker bleiben. Für den Hausgebrauch wird man so etwas ja wohl noch nachbauen dürfen. Allerdings mache ich mir Sorgen um die Stromaufnahme. Dürfte im Betrieb teuer werden, da viele mechanische Bewegungen stattfinden.
Pete K. schrieb: > Für den Hausgebrauch wird man so etwas ja wohl noch nachbauen dürfen. Ja natürlich. In Deinen eigenen 4 Wänden kannst Du soviele Patente nutzen wie Du willst. Solange Du die "Produkte" nicht verkloppst, gibts da kein Problem.
Welche Schutzrechte sind denn speziell bei diesen Uhren hinterlegt?
Ich würde zunächst anstelle der realen Uhren ein Simulationsprogramm schreiben, was diese auf einem Bildschirm darstellt. Die Datenübertragung könnte man ganz simpel per seriellem Protokoll machen, z.B. so: - Adresse für Uhrwerk 1 (größer 60, z.B. 61) - Wert für Stundenzeiger 1 (0..59) - Wert für Minutenzeiger 1 (0..59) - Adresse für Uhrwerk 2 (größer 60, z.B. 62) - Wert für Stundenzeiger 2 - Wert für Minutenzeiger 2 Dann kann man "in Ruhe" das Programm zur Erstellung der Muster machen und bequem testen. Läuft dieses, ersetzt man die Bildschirmsimulation durch einzelne "Uhrwerke", die alle an einer seriellen Leitung "horchen" und genau oben beschriebenes Protokoll verstehen ...
Hallo, Freunde der Softwarelösung, wer mal bisschen probieren will - viel Spass ... Sascha
Pete K. schrieb: > Allerdings mache ich mir Sorgen um die Stromaufnahme. Dürfte im Betrieb > teuer werden, da viele mechanische Bewegungen stattfinden. Ach watt, da wird doch keine große Masse bewegt. Denke doch nur mal an mechanische Quarzuhrwerke. Die haben einen Sekundenzeiger, der logischerweise immerhin einmal pro Sekunde bewegt wird. Und die Dinger kommen mit einer einzigen AA-Zelle mindestens ein Jahr im Dauerbetrieb aus. Wenn man mal eine AA-Zelle mit ~2000 mAh annimmt, sind das ca. 3 Wh Energiegehalt. Das Jahr hat rund 8800 Stunden, also kann das Werk so einer Uhr nur ungefähr 350 µW verbrauchen. Eher weniger, denn die Elektronik der Uhr braucht ja auch noch etwas Energie, aber bleiben wir mal bei den 350µW für eine durchschnittliche Schrittrate von 1Hz. Wenn man nun auf die Installation mit 135 Uhren 2 Zeigern einer durchschnittliche Schrittrate von vielleicht 10Hz hochrechnet, kommt man pi mal Daumen auf 0,95W. Lächerlich. Viele TVs und Computer verbrauchen mehr im StandBy...
Hallo zusammen. Ich habe mir mal 2 Funkuhrwerke zum testen bestellt. Diese haben 2 Lavet-Motoren, einen für den Minuten und einen für den Sekundenzeiger. Davon habe ich nun mal eine zerlegt. Die Elektronik kann man komplett entfernen und dann die Motoren einfach selbst ansteuern. Man muss die Motoren immer nur mit wechselnder Polarität pulsen und die Zeiger bewegen sich. (Natürlich immer nur im Uhrzeigersinn.) Zusätzlich waren auf der Platine eine LED und eine Photodiode, die wahrscheinlich für eine Positionserkennung gedacht waren. Ich habe mir nun überlegt eine 8*3 Uhr zu bauen. Für jede Ziffer also 6 Uhren. Dann würde ich 6*4+6*1+1 Pins für die Ansteuerung einer Ziffer brauchen. 2 Pins pro Motor + 1 Pin für die Fotodiode und 1 Pin um die LEDs bei allen Uhren ein und aus zu schalten. Was mit einem AtMega32 zu schaffen wäre. Oder hättet ihr andere Ideen? lg Thomas
Ein Zeiger und eine Scheibe mit aufgedruckten Zeiger, die Scheibe wird über einen zahnkranz an der Kreislinie bewegt. Oder man verwendet e-Ink: http://nxtinsight.com/sony-planning-making-e-ink-smartwatch/ MfG,
Frank M. schrieb: > Muss man mal fragen, wieviel 288 Stück kosten ;-) Die sehen für mich aus, wie für Roboter-Arme, nicht wie für Uhrenzeiger. Ich finde einen Nachbau auch interessant und habe versucht, alle Beiträge sorgfältig zu lesen. Die einzigen beiden bisher bekannten zielführenden Vorschläge, sind die Folgenden, oder habe ich was übersehen? sonceboz 6407: innen: 310° außen: 305° VID28-05: innen: 315° außen: 280° Jojo S. schrieb: > … nur der interne Stop muss ausgebaut werden. Gilt das für Beide? Denn hier steht: "Test Conditions: Motors with internal Stop": http://search.alkon.net/cgi-bin/pdf.pl?pdfname=07087.pdf Das hört sich so an, als ob es die Motoren auch ohne gibt. Der sonceboz kostet über 13€ (800 Rubel). Richtig? Den VID28-05 findet man in China für €5,70 incl. Versand. Falls ich alles richtig verstanden habe, würde ich einfach mal vier VID28-05 bestellen (€22,78), um weiter zu kommen. Was meint Ihr? Alternativ: Hat jemand Kontakte zu einem Automobil-Zulieferer, der Schalttafeleinsätze baut? Muss ja nicht in Deutschland sein.
c-hater schrieb: > Ach watt, da wird doch keine große Masse bewegt. > > Denke doch nur mal an mechanische Quarzuhrwerke. Die haben einen > Sekundenzeiger, der logischerweise immerhin einmal pro Sekunde bewegt > wird. Also mit einem mechanische Quarzuhrwerk haben die Uhren der Victor-Hunt-Uhr nicht viel gemein. Schau dir mal die oben verlinkten Videos etwas genauer an: beide Zeiger lassen sich unabhängig voneinander, einzeln und gemeinsam, in beiden Richtungen mit variabler Geschwindigkeit steuern. Die Leistungsaufnahme dürfte entsprechend hoch sein. Und es sind auch weit mehr als 60 Schritte pro Umdrehung für einen Zeiger. Bei 60 Schritten wäre das Ganze ein ziemliches Geruckel und Gezuckel.
Moin, finde diese Uhr auch sehr ansprechend und bin auch schon am überlegen ob dass mein nächstes Projekt wäre. Was spricht eigentlich dagegen die einzelnen "Uhrwerke" mit einem Shiftregister anzusteuern? Für jeden (VID28-05) werden somit 2 Ausgänge (1. Bit = Impuls; 2. Bit = Richtung) von einem Schieberegister benötigt(z.b. http://www.reichelt.de/74HC-595/3/index.html?&ACTION=3&LA=446&ARTICLE=3269&artnr=74HC+595) Die Schieberegister speißt man mit SPI. Je nachdem wie die Ansteuerung des Schrittmotors wäre, müsste man natürlich pro "Uhrwerk" eine dementsprechende Beschaltung basteln, damit diese zwei Bits ausgewertet werden. Durch den OE (output enabled) hat man dann auch eine gleichzeitige Auslösung der Impulse und würde so eine unschöne "verbreitung" auf der Uhr ausmärzen. (Ich denke daran, dass sich ein gewisser Welleneffekt über die Uhren ausbreiten könnte.) Was ich damit sagen möchte, ein uC reicht alle mal mit dieser Lösung, da nur 3 Ports für den SPI + 1 für OE gebraucht wird. Hier auch ein gutes tutorial zu dem Thema ;) http://www.mikrocontroller.net/articles/AVR-Tutorial:_Schieberegister Edit: Mit dieser Methode lässt sich ggf. auch eine PWM für die verschiedenen Motoren generieren lassen = Unterschiedliche Geschwindigkeiten der Uhrzeiger. Gerade fällt mir auf, man bräuchte doch mind. 3 Ausgänge. Zeiger1, Zeiger2, Richtung. Die Richtungsanzeige kann man ja für beide Zeiger gebrauchen.
Sören Kleer schrieb: > Was spricht eigentlich dagegen die einzelnen "Uhrwerke" mit einem > Shiftregister anzusteuern? So würde ich das dann auch machen, also es spricht meines Erachten gar nix dagegen. Was mir noch nicht klar ist, wie die Position 'normiert' wird, wenn man den 'internal Stop' entfernt. Eventuell manuell, oder man nimmt z.B. einen MCP23S08 oder MCP23S17 (ca. 80ct) pro Uhr. Beide haben auch Eingänge, die einen Positions-Sensor auslesen könnten. Bei 'manuell' spielen die Leute aber bestimmt immer Streiche, wenn keine Scheibe davor ist.
Angehängte Dateien:
-

clock.png
38 KB
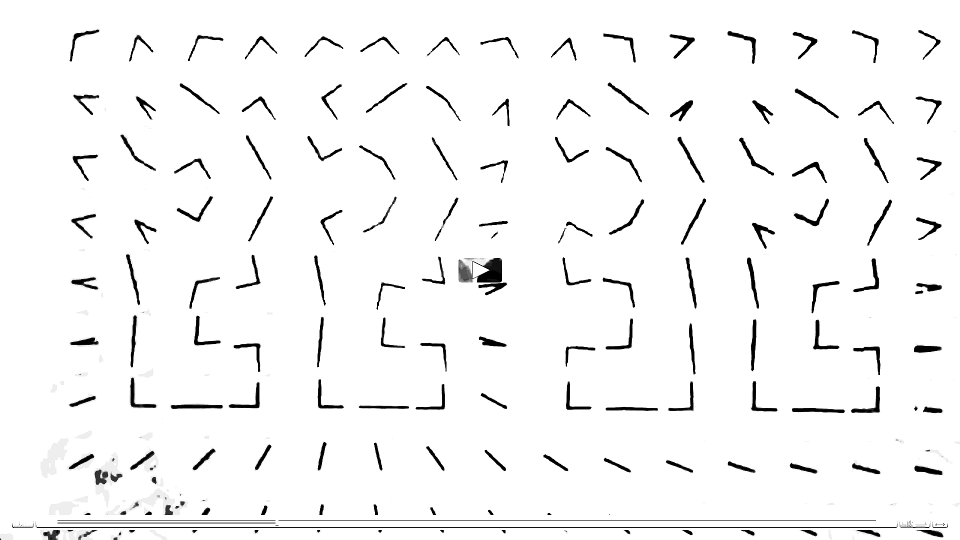
Die Achsenbefestigung verwundert mich. Zeiger mechanischer Uhren sind an der Stelle der Achse entweder kreisförmig verdickt oder überkreuzen sich. http://www.voelkner.de/products/493936/100-xl.jpg http://images.fotocommunity.de/bilder/jahreszeiten/winter/1702-uhr-e9e683aa-4cf8-451c-a82c-f87a4f48838a.jpg Anders sollte eine stabile Befestigung an der Achse nicht (?) möglich sein. Bei den Beispieluhren ist weder eine Verdickung noch eine überkreuzung zu sehen (siehe Kontrastverstärktes Bild). Eventuell sind es keine Zeiger die da bewegt werden sondern ineinander verschachtelte koaxile "Büchsen". Die äußere Büchse mit transparenten Boden und aufgezeichnetet Zeiger, die innere mit weißen Boden und aufgezeichneten Zeiger. MfG,
Angehängte Dateien:
-

kontrastverstaerkt.png
8,4 KB
Fpga Kuechle schrieb: > siehe Kontrastverstärktes Bild Gute Idee. Alles klar?
Hey, Torsten C. schrieb: > Den VID28-05 findet man in China für €5,70 incl. Versand. magst Du einen Link dazu posten? Ich finde nur das o. g. Angebot auf aliexpress ... Danke! Gruß John
Angehängte Dateien:
-

VID28-05.png
80 KB
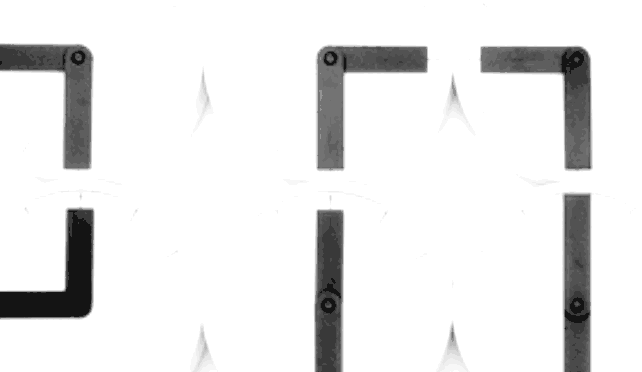
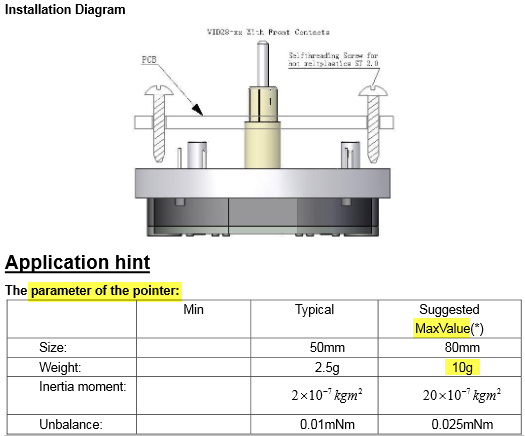
John schrieb: > Ich finde nur das o. g. Angebot auf aliexpress Ich auch, aber ich schrieb: > würde ich einfach mal vier VID28-05 bestellen (€22,78) Und 22,78 / 4 = 5,695 Bei mehr als vier Stück kommt Einfuhrumsatzsteuer drauf. BTW: Hat jemand 'ne bessere Idee für die Zeiger, als sie in China per Laser schneiden zu lassen? Siehe Beitrag "Re: Gehäuse für meine Platinen" Sind 2.55mm zu dick? Müsste man man nachrechnen. "The parameter of the pointer" stehen ja im Datenblatt^^. Die Wellen sind jedenfalls lang genug (Bild), wenn sich meine 'Photogrammetrie' nicht vertan hat. Ich bin von der Breite = 35mm ausgegangen.
Moin, bin mal auf die Herstellerseite vom Vid gegangen (http://www.vid.wellgain.com) und da ist mir der "VID69 Series Car Clock Stepper Motor" ins Auge gefallen. Das Teil ist ja quasi schon ein Uhrwerk und kann Links, als auch Rechts rum laufen. Der einzige "Nachteil" ist, dass der Stundenzeiger wohl an den Minutenzeiger gekoppelt ist. ("Datenblatt" http://www.vid.wellgain.com/UploadFile/down/2009111391212_VID69%20manual%20EN-080623.pdf) Die Einsteuerung allerdings ist so simpel wie beim VID28 (wenn mans verstanden hat...) Soweit ich das Richtig verstanden habe, gibt man eine frequenz auf Pin 2 + 3. Je nachdem welche Richtung gedreht werden soll muss auf Pin 1 bzw. auf Pin 4 dann ein Signal gegeben werden. Dieses Signal ist einen 3/6 Puls der Frequenz von PIN2/3 lang. Je nachdem ob es vor oder nach der Steigenden Flanke auf Pin2/3 ist, muss es auf Pin1 oder Pin4 gegeben werden. So braucht man also doch nur 2 Pins vom Schieberegister :) die Frequenz der anderen Pins kann einfach aufgelegt werden direkt vom uC. Achja, das stück kostet 3,50Us dollar inkl. versand (3,12€) http://de.aliexpress.com/item/Weili-100-original-VID69-02-stepper-motor-car-dashboard-clock-motor-micro-stepping-motor/1279016597.html
Sören Kleer schrieb: > Der einzige "Nachteil" ist, dass der Stundenzeiger wohl an > den Minutenzeiger gekoppelt ist. Ich dachte, das sei ein 'no go'? Oder?
Torsten C. schrieb: > Fpga Kuechle schrieb: >> siehe Kontrastverstärktes Bild > > Gute Idee. Alles klar? Ist das auch aus dem oben verlinkten Video?
Torsten C. schrieb: > Ich dachte, das sei ein 'no go'? Oder? Stimmt. Es wäre zumindest eine Alternative. Man könnte damit zwar nicht die Muster dieses Meisterstücks direkt nachmachen können, aber mit der Zeit läuft das auch dahin :D Bzg. den Zeigern. Ich würde die gießen mit Harz oder flüssigem Plastik (gibts doch oder nicht?). Machste dir zwei schöne Rohlinge und davon macht man sich eine schöne Silikon-Form mit der man sich dann x-beliebige, gleiche Zeiger gießen kann.
Fpga Kuechle schrieb: > Ist das auch aus dem oben verlinkten Video? Nein, keine Sorge. Das sollte nur Deine Frage beantworten. PS: Das hier war's: http://static1.squarespace.com/static/5242de96e4b0d074ce6d9d50/52459e88e4b030477ccfe59b/52459e88e4b030477ccfe59a/1380293214311/002_Clock%20Clock%20white.jpg
Was bedeutet eigentlich dieses "internal Stop"? Ich meine Übersetzen
kann ichs mir auch, allerdings verwirrt es mich dass in der
Produktbeschreibung folgendes Steht:
> ■ High speed rotation: 400°/sec of out shaft and 600°/sec of inner shaft.
Ist damit die "relative" Geschwindigkeit gemeint die erreicht werden
könnte auf eine Sekunde hochgerechnet, oder interpretieren wir das
Chinesen-English falsch?
Hatte bisher nicht viel mit Schritt motoren zu tun.
Sören Kleer schrieb: > aber mit der Zeit läuft das auch dahin Wie meinst Du das? Wenn der Stunden-Zeiger z.B. genau auf 3 Uhr steht, dann kann der Minuten-Zeiger bei dem VID28 nur auf 12 stehen. Wenn der Minuten-Zeiger nicht auf 12 steht, ist der Stunden-Zeiger etwas schräg. Das steht aber schon mehrfach hier im Thread. Sören Kleer schrieb: > Was bedeutet eigentlich dieses "internal Stop"? Das ist ein Anschlag. Kennst Du noch Diskettenlaufwerke? Sowas gab es im letzten Jahrtausend. Die Schreib-Lese-Köpfe fahren beim Einschalten auch gegen den Anschlag, um die Position zu normieren oder zu kalibrieren, oder wie man das auch immer nennt. Daher meine Frage mit 'manuell'^^.
Statt Mechanik ein Display, wurde schon geposted und ist gemogelt, klar. [Sherz Modus An] Aber, wenn man das ganze ähnlich aufwendig wie dual axis stepper angehen möchte: Schick wäre natürlich auch das klassische runde Display in 135facher Ausführung - eine (kleine) Oszi-Röhre in grün, jede mit einem Tiny und mit einer zentralen Spannungsversorgung und einer zentralen Steuerung. Preis und Stromverbrauch allerdings sehr ordentlich...
Sören Kleer schrieb: > Ist damit die "relative" Geschwindigkeit gemeint…? Damit ist die Winkelgeschwindigkeit gemeint.
Vielleicht entsteht hier ja gerade ein Gemeinschaftsprojekt? Torsten C. schrieb: > Falls ich alles richtig verstanden habe, würde ich einfach mal vier > VID28-05 bestellen (€22,78), um weiter zu kommen. Was meint Ihr? Ich habe eben bestellt, da bisher kein Widerspruch kam. Ich muss mal sehen, ob sich der 'internal Stop' ausbauen lässt. Ich hoffe, es ist Konsens, dass das VID28-05 dann ggf. die Basis ist. Danach immer in 4er-Losen bestellen und die nächsten erst, wenn man für die davor die Tracking-Nummer hat. Wenn man zu schnell nacheinander bestellt, kann man Pech haben, dass man doch Einfuhrumsatzsteuer bezahlen muss.
Angehängte Dateien:
-

sorry_wegen_offtopic.jpg
150 KB
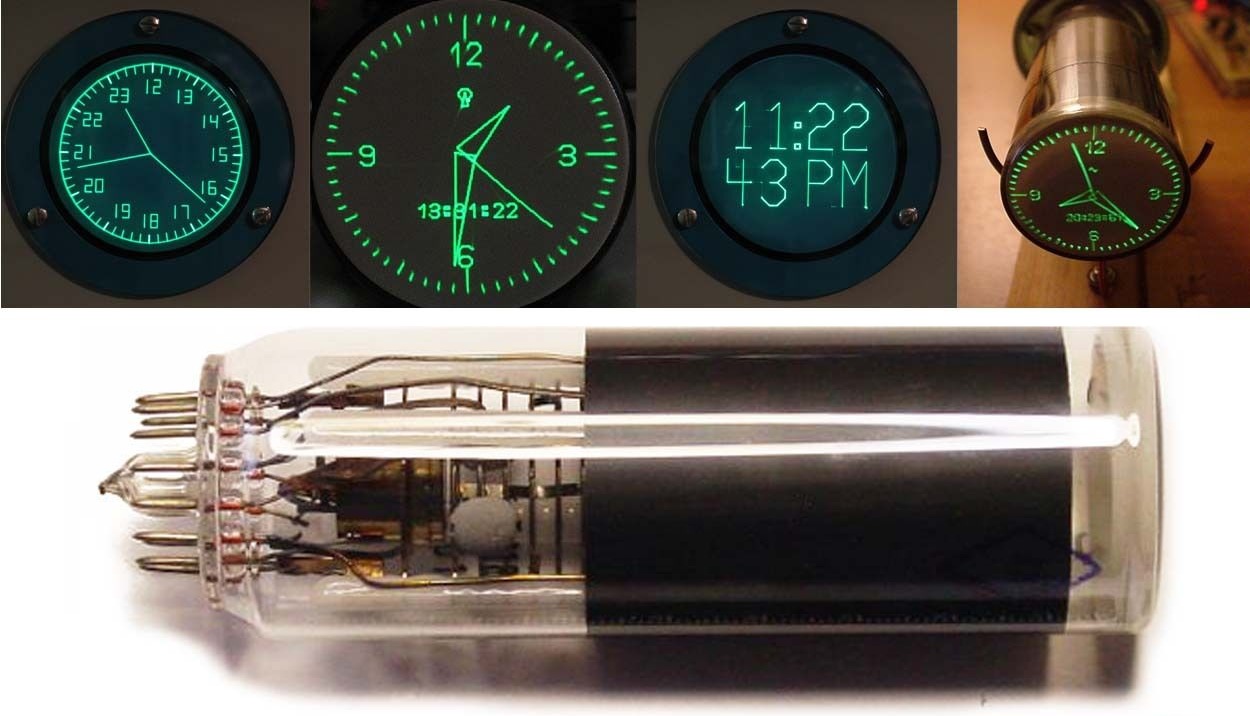
Michael S. schrieb: > eine (kleine) Oszi-Röhre in grün ebay 201332103447 - Gute Nacht!
Michael S. schrieb: > Statt Mechanik ein Display, wurde schon geposted und ist gemogelt, klar. Nope "Mogel" ist das nicht, selbst im Automobilbereich werden die klassischen Zeigerinstrumente durch Displays ersetzt: http://www.autoguide.com/blog/wp-content/uploads//2012/11/japan-display-instrument-cluster.jpg Der Anzeige effekt ist der selbe, die Wartbarkeit durch Verzicht auf mechanisch bewegte teile besser. MfG,
@Torsten C. (torsten_c) Hallo Torsten, falls du VID28-05 bei Alibaba bestellen möchtest würde ich auch gern 10 Stück mitbestellen. Zum "warmwerden" mit der Hardware sollte das reichen. Das Thema "Homing" ist auch noch offen. Beide Zeiger müssen irgendwann wissen, wo es losgeht, manuelles Teachen geht auch aber dann sollte das gesamte System nie vergessen wo es steht und keine Schrittfehler machen... Grüße Runout
Thomas T. schrieb: > falls du VID28-05 bei Alibaba bestellen möchtest > würde ich auch gern 10 Stück mitbestellen. Hallo Thomas / Runout, prima, wenn wir 'am gleichen Strang ziehen'. Zu Deiner Bitte: Das steht zwar oben schon alles, aber nochmal: Ich habe bereits bestellt, und 'mitbestellen' macht keinen Sinn, da bei über 4 Stück noch die Einfuhrumsatzsteuer hinzu kommt. Bei 100 Stück könnte man mal vorsichtig bei mehreren Verkäufern anfragen, wer einen Sonderpreis macht, der sich trotz Einfuhrumsatzsteuer noch rechnet. Aber: 1. Das müsste jemand organisieren. 2. Das lohnt sich erst, wenn sich die Muster als tauglich erweisen. Bis dahin ist es am billigsten, wenn jeder selbst bestellt. Wobei ich von meinen vier Stück auch mal einen abgeben könnte. Aber erstmal müssten die bei mir ankommen. Bitte helft mal! Ich grübel noch, wie man die Zeiger-Positionen kalibriert, nach einem Reset oder wenn jemand dran rumgespielt hat. ❶ Loch im Ziffernblatt und dahinter eine Reflex-Lichtschranke (jede Uhr einzeln) ❷ Auswertung eines Kamera-Bildes (alle Uhren zusammen) ❸ … weitere Ideen?
Ich habe mir das Video angesehen und meine, dass man die Uhrzeit nur schlecht ablesen kann. So eine Hokuspokus-Spielerei würde ich mir nicht mal geschenkt an die Wand hängen. Sicher hat das "Kunstwerk" viel Geld gekostet und man kann es nicht mal eben für ein paar Euros nachbauen. Sonst würde es nicht in einem Hotel ausgestellt, sondern bei Pollin & Consorten zwischen den LED-Advendskränzen verramscht werden.
Zu ❶: Der TCRT5000 sieht aus meiner Sicht ganz gut aus. Bei mouser und digikey lieferbar und aus China schön billig: http://www.vishay.com/docs/83760/tcrt5000.pdf
es sieht zwar wie einzelne Uhren aus (grosser und kleiner Zeiger) es müsen nicht unbedingt komplette Uhrwerke sein, die man da Synchronisieren muss. Es können auch "nur" einzelne Zeiger sein, die auf getrennten Wellen (Welle in einer Hohlwelle) laufen. Hinten im Inneren haben die dann Positionsscheiben auf den Wellen, die dann mit Lichtschranken detektiert werden. Die Scheiben könnten also hauchdünne Linien zur Positions-Erkennung drauf haben. So wie in Druckern diese Kunststoff-Streifen zur Positionsbestimmung des Druckkopfes. Mechanisch noch 'ne relativ einfache Sache. aaaber die Programmierung :D ich könnte das nicht. >So eine Hokuspokus-Spielerei würde ich mir nicht >mal geschenkt an die Wand hängen. na, na, komm für geschenkt?
Dirk J. schrieb: > Sicher hat das "Kunstwerk" viel Geld > gekostet Sehe ich auch so, daß Ding ist vorrangig ein Kunstprojekt. Daß man damit manchmal auch schlecht erkennbare Ziffern darstellen kann, ist nur ein Nebeneffekt. Neben dem mechanischen Aufbau wird auch das Ausdenken der Muster viel Zeit beanspruchen.
☞ J-A von der Heyden ☜ schrieb: > Hinten im Inneren haben die dann Positionsscheiben auf den Wellen, > die dann mit Lichtschranken detektiert werden. Ja, aber … Die Welle hat keine Abflachung oder Nut, so dass die Zeiger zwar kraftschlüssig, aber nicht formschlüssig verdrehsicher auf den koaxialen Wellen sitzen. Es wäre schön, wenn es so einfach wäre, denn das blöde Loch für den TCRT5000 im Ziffernblatt würde mir gar nicht gefallen. Wenn einer von Außen an den Zeigern rumfingert, rutscht ein Zeiger vielleicht auf der Welle. Dann stimmen die Zeiger nicht mehr zu den Markierungen auf den Positionsscheiben. Vielleicht denke ich zu kompliziert und man verklebt die Zeiger einfach auf den beiden Wellen? Aber Kunststoff auf poliertem Metall? Ob das wohl hält? PS: Vielleicht vor dem Kleben etwas anrauhen, mit Schmirgelpapier. Ich teste das mal, wenn die Teile da sind.
Torsten C. schrieb: > ... > Wenn einer von Außen an den Zeigern rumfingert, rutscht ein Zeiger > vielleicht auf der Welle. Dann stimmen die Zeiger nicht mehr zu den > Markierungen auf den Positionsscheiben. Wahrscheinlich gibt es einen Service-Mode zum justieren: z.B. alle Zeiger müssten dann in eine Richtung zeigen.
Torsten C. schrieb: > Die Welle hat keine Abflachung oder Nut, so dass die Zeiger zwar > kraftschlüssig, aber nicht formschlüssig verdrehsicher auf den koaxialen > Wellen sitzen. so genau kann ich das hier nicht wirklich im Video erkennen, wie das nun sitzt. So Grundverschieden zu einer Zeigermechanik eine rUhr wird das nicht sein. Nur behaupte ich mal, dass da eben keine ganzen Uhrwerke dahintersitzen, Und wer sollte an den Zeigern rumfummeln, die sind doch bestimmt hinter einer Scheibe oder so. Warum sollte ein Zeiger nicht auch ohne Nut halten können? -Presspassung? Da braucht es noch nicht mal Kleber. Nach dem Prinzip halten Teile für Jahrzehnte zusammen
Angehängte Dateien:
-

Uhr.jpg
52 KB
Bei dieser Uhr scheinen die großen und kleinen Zeiger mit der festen Übersetzung 2:1 miteinander verbunden zu sein: zwei Umdrehungen vom großen Zeiger ergibt eine Umdrehung kleiner Zeiger. Im Video wird auch die Drehrichtung der Zeiger nicht geändert. https://vimeo.com/52798481 Dann ist aber die Änderung der Einstellung, wie im Bild markiert, nicht möglich! Wenn man genau hinschaut, erkennt man, dass das Video an dieser Stelle manipuliert wurde. Gruß John
Moin, eine Manipulation kann ich nicht erkennen. Auch die Übersetzung von 1:2 ist nicht nachvollziehbar in der genannten stelle. Man beachte die Zeiger an der markierten stelle die letzten 2 sec vor den tauben. Der Minutenzeiger läuft eindeutig schneller. Zur Positionierung würde ich reedsensoren an unterschiedlichen stellen verwenden. Die Magneten kann man im Zeiger einbetten und die reed sensoren verdeckt hinter dem Ziffernblatt. Die Idee tauchte weiter oben schon auf und diese find ich wegen der Unsichtbarkeit am charmantesten. Mach mich gleich nochmal auf die suche nach einem Motor ohne internal stopp. Lg
Sören Kleer schrieb: > eine Manipulation kann ich nicht erkennen. Achte in dem angehängten mp4 mal auf die Länge der Zeiger. Da tauschen plötzlich der Lange und der Kurze die Position von einem Frame zum nächsten. Hat bei mir auch etwas gedauert dass ich das gesehen habe. Aber unabhängig davon ob das Video manipuliert ist oder nicht, ist diese Uhr möglich zu bauen. Und wenn man die beiden Zeiger unabhängig von einander ansteuern kann ist das "Übersetzungsverhältnis" zwischen den Zeigern flexibel und somit egal. Aber was mir noch auffällt, in diesem Video drehen sich die Zeiger nur in eine Richtung, weshalb ich auch erst mal den Ansatz mit echten Uhrwerken weiterverfolgen werde, auch wenn da ein Uhrwerk 12€ kostet.
Okay, solche.... Designer... Schau dir den Vid69-05 mal an (http://de.aliexpress.com/item/Weili-100-original-VID69-02-stepper-motor-car-dashboard-clock-motor-micro-stepping-motor/1279016597.html) das ist ein Uhrwerk welches eben ein direktes übersetzungsverhältnis hat (heißt Minuten-zeiger dreht 360° Stundenzeiger in der gleichen zeit 360°/12) Damit kann man allerdings nur begrenzt Muster darstellen. Ich find einfach keine vergleichbaren Motoren, wirklich wahnsinn. Dachte die Chinesen machen alles :)
Torsten C. schrieb: > Bitte helft mal! > > Ich grübel noch, wie man die Zeiger-Positionen kalibriert, nach einem > Reset oder wenn jemand dran rumgespielt hat. > a) Es gibt Kunststoff der Infrarot durchlässt b) Ein metallischer Zeiger kann über einen Metalldetektor detektiert werden c)die Stromaufnahme des Motors dürfte davon abhängig sein ob der zeiger sich in Richtung 6 (niedrig da Schwerkraft unterstützt) oder 12 (Strom hoch) MfG,
Thomas Z. schrieb: > Sören Kleer schrieb: >> eine Manipulation kann ich nicht erkennen. > > Achte in dem angehängten mp4 mal auf die Länge der Zeiger. > Da tauschen plötzlich der Lange und der Kurze die Position von einem > Frame zum nächsten. > Hat bei mir auch etwas gedauert dass ich das gesehen habe. Und schau mal welcher zeiger Schatten wirft ... MfG,
Interessantes Thema. bzgl. VID28-05: Ich habe schonmal ein Projekt mit dem VID29 gemacht, der die "Einfachversion" des VID28 darstellt. Diesen Typ gibt es mit und ohne interne Endanschläge. Die Anschläge sind so gemacht, daß das Abtriebszahnrad, welches auf der Zeigerwelle sitzt, auf einer Seite eine Erhöhung (hervorstehende Nase) hat, die in einer kreisbogenförmigen Nut im Gehäuse läuft und dort anschlägt. Diese Nase lässt sich theoretisch einfach abschneiden, dann kann der Motor problemlos 360° Drehwinkel (genau wie sein Bruder, der von Haus aus ein nasenloses Zahnrad hat). Praktisch ist das jedoch ziemlich schwierig, da man den Motor zerlegen muss (filigran, empfindlich), am Zahnrad schnitzen um es zu planen ohne es zu verbiegen und man das Ganze wieder so zusammensetzen muss, daß alle Wellen und Zahnräder in beiden Gehäusehälften richtig einrasten. Es geht, aber bei 300 Motoren möchte das keiner machen! Noch vergessen: wenn auch nur ein winziger Span ins Innere des Steppers gelangt, läuft der nicht mehr rund, sondern hakt und verliert Steps. Ich weiss nicht, ob es eine anschlaglose Version des VID28 gibt, diese wäre aber m.E. nach ein Muss! >Wenn der Stunden-Zeiger z.B. genau auf 3 Uhr steht, dann kann der >Minuten-Zeiger bei dem VID28 nur auf 12 stehen. Das glaube ich nicht, die beiden Systeme im Doppelmotor sind imho NICHT mechanisch gekoppelt. > Für jeden (VID28-05) werden somit 2 Ausgänge (1. Bit = Impuls; 2. Bit = > Richtung) von einem Schieberegister benötigt(z.b. Das stimmt nicht. Die Motoren enthalten 2 Spulen (also 2x2 beim VID28), die mit dem im Datenblatt angegebenen Polaritätsmuster bestromt werden müssen. Man braucht dazu 4 Controllerpins pro (Teil-)Motor. Es geht aber ohne Treiber, in meinen Anzeigen habe ich die Spulen direkt an ATtiny-Push-Pull-Pins gehängt. Bei Teilschrittbetrieb "tickern" die Motoren übrigends hörbar und die Zeigerbewegung ist deutlich "steppend". Ein Motor alleine ist zwar sehr leise, aber ich könnte mir vorstellen, daß bei ansonsten stillem Raum sehr störend wirken könnte, wenn 300 Stepper gleichzeitig verfahren. Da würde Mikroschritt evtl. Abhilfe schaffen, dann wird aber die Ansteuerung deutlich aufwendiger. Zur Zeigerbefestigung: Idealerweise sollte der Zeiger ein leicht konisches Loch haben (dafür gibt es konische Reibahlen im Modellbaubereich), diesen kann man dann sehr einfach und dauerhaft aufpressen.
@ Kai-Uwe: Danke für Deinen Bericht!!! :-) ☞ J-A von der Heyden ☜ schrieb: > Torsten C. schrieb: >> Die Welle hat keine Abflachung oder Nut... > so genau kann ich das hier nicht wirklich im Video erkennen, Sorry, ich meinte nicht das Video sondern VID28-05.png und das Datenblatt, hätte ich dazu schreiben sollen. Ich probiere es aus, wenn die VID28-05 da sind. Zeiger muss ich auch noch bestellen, bin noch nicht dazu gekommen. Kai-Uwe schrieb: >>Wenn der Stunden-Zeiger z.B. genau auf 3 Uhr steht, dann kann der >>Minuten-Zeiger bei dem VID28 nur auf 12 stehen. > Das glaube ich nicht, die beiden Systeme im Doppelmotor sind imho NICHT > mechanisch gekoppelt. Stimmt! Ich hab mich vertan, es sollte heißen: Dann kann der Minuten-Zeiger bei dem VID69 nur auf 12 stehen. Das sollte sich auf Sören Kleer beziehen, der schrieb: > aber mit der Zeit läuft das auch dahin @Sören: Ich habe noch nicht verstanden, wie diese Worte gemeint waren. Fpga Kuechle schrieb: > c)die Stromaufnahme des Motors dürfte davon abhängig sein … Da muss man erstmal drauf kommen, Danke. :-) Bei einem Schalttafeleinsatz oder wenn die Uhren nicht immer genau waagerecht stehen, haut das zwar nicht hin, aber von 'waagerecht' könnte man hier meines Erachtens immer ausgehen. Oder? > Kunststoff der Infrarot durchlässt Ich hätte gern die Flexibilität, z.B. auch mit einer Sperrholzplatte arbeiten zu können. > Ein metallischer Zeiger kann über einen Metalldetektor detektiert > werden Auch 'ne Idee. Andererseits hätte Schwarzer Kunststoff den Vorteil, dass man ihn nicht lackieren muss und dass das mit der "Presspassung"^^ einfacher geht. Die Entscheidung hängt m.E. auch vom Aufwand für einen Metalldetektor ab. Mal überlegen. Die Lösung "c)die Stromaufnahme" gefällt mir im Moment am besten.
Kai-Uwe schrieb: > Da würde Mikroschritt evtl. Abhilfe schaffen, dann wird aber die > Ansteuerung deutlich aufwendiger. Ich denke, soviel mehr Aufwand wäre das nicht. Wirklich aufwendig empinde ich erst die Variante "c)die Stromaufnahme …"^^. Ich habe mich gerade mal über die Stepper Power Driver von TRINAMIC etwas schlau gemacht. Der TMC5062 z.B. ist zwar total 'oversized' und kostet bei Digikey über 10€, aber die Technik dahinter klingt interessant: > stallGuard2 high precision sensorless motor load detection gives more > information on the drive allowing functions like sensorless homing of > the drive mechanics. @Fpga Kuechle: "sensorless homing", dass ist doch das, was Du mit "c)" meintest, oder? Im Grunde müsste man so einen 'stallGuard2' diskret nachbauen. Hmmm.
Fpga Kuechle schrieb: > c)die Stromaufnahme des Motors dürfte davon abhängig sein ob der Zeiger > sich in Richtung 6 (niedrig da Schwerkraft unterstützt) oder 12 (Strom > hoch) … PS: Das scheint mit einem TRINAMIC tatsächlich zu gehen, zumindest wenn der Zeiger in Bewegung ist, also nicht im Stillstand, siehe: http://ttdg.trinamic.com/viewtopic.php?f=15&t=5237 Leider habe ich die TRINAMIC-Treiber bei Ali auch nicht günstiger gefunden, als bei digikey. Also alles erstmal nur 'Theorie'.
Hallo Uhrenbauer, ich möchte einen kleinen Beitrag zum Thema "Positionserkennung" schreiben. Die Lösung "Stromaufnahme" zur Positionserkennung halte ich für problematisch, da man gewissermaßen die statische Unwucht des Zeigers bestimmen will. Üblicherweise versucht man aber, Zeiger möglichst gut auszuwuchten um eben unterschiedliche Belastungen des Motors zu vermeiden. Hier besteht also ein Zielkonflikt. Der Momentenverlauf ist außerdem Sinusförmig, und hier zuverlässig aus der Stromaufnahme das absolute Maximum/Minimum bestimmen zu wollen halte ich für äußerst schwierig. Ich möchte noch eine "Bauern"-Lösung ins Gespräch bringen. Ein winziger Elektromagnet mit einem Stößel und einer Rückholfeder, der von hinten durch das Ziffernblatt gesteckt wird. Zum Stellen der Uhr wird der Stößel als Anschlag ausgefahren und die Zeiger solange bewegt bis sie am Stößel angeschlagen sein müssen (also im Zweifelsfall eine ganze Umdrehung). Dann wird der Stößel wieder entstromt und die Uhr kann starten. Auch wenn sich diese Lösung erstmal martialisch anhört hat sie einige Vorteile: - Man braucht keine gesonderte Auswerteelektronik, der Stößel muss beim Stellen nur bestromt werden - Unabhängig von der Wahl der Zeiger oder der Rückplatte (Zeiger müssen gleichwohl das Moment des Schrittmotors aushalten) - Genaue mechanische Position wird eingehalten - Keine getrennte Behandlung der beiden Zeiger notwendig Ich habe etwas nach passenden Stößeln gefunden, bin aber noch nicht zu 100% von der Wahl überzeugt: http://www.red-magnetics.com/download/datenblatt/redmagnetics-datenblatt-its-lh-1108.pdf Ich freue mich auf eure Kommentare. Grüße, Stefan
Vielleicht gingen ja diese kleinen Synchronmotoren, wie sie in Schrittschaltwerken verwendet werden. Die laufen ja synchron mit der Netzfrequenz. Wenn die taktgenau angesteuert werden, sollten sie zusammen synchron bleiben.
Stefan H. schrieb: > Ich freue mich auf eure Kommentare. Dann fange ich mal an: Ich finde die Idee gut! 1. Man hat kein echtes Loch im Ziffernblatt, sondern höchstens einen runden Spalt. Die Stirnseite des Stößels kann man ja in Ziffernblatt- Farbe lackieren. OK, bei Holz-Maserung kommt man an die Grenzen. 2. Es funktioniert zuverlässig, auch wenn die Uhr schräge oder gar auf dem Kopf steht.
Sind das eigentlich nur Zeiger oder evtl auch durchsichtige Scheiben, wo nur schwarze Balken drauf (gedruckt, geklebt) sind? dann liesse sich sowas noch anders als nur mit Zentralen Wellen antreiben. Diese Wellen kann man aber im Video als Schattenwurf erkennen. vielleicht 'ne weitere Auswert-Möglichkeit: Magnete auf den Wellen, zusammen mit Hall-Sensoren/Feldplatten etc? runde, durchgängige Schleiferbahn. Können die Zeiger sich unendlich um die Achsen drehen? oder haben die wie beim 10-Gang.Poti doch irgendwann einen Anschlag?
Angehängte Dateien:
-

China-Hubmagnet.jpg
34 KB -

VID28-05a.png
42 KB
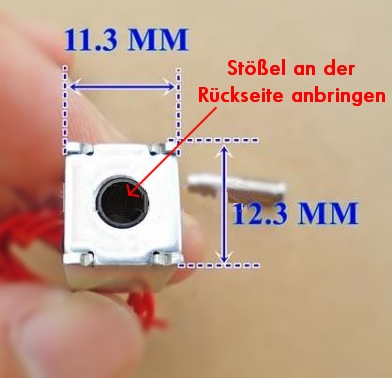
☞ J-A von der Heyden ☜ schrieb: > Magnete auf den Wellen, zusammen mit Hall-Sensoren Das hatte Sören Kleer schon vorgeschlagen, aber ich befürchte, dann werden die Zeiger zu schwer (siehe 'parameter of the pointer'). Bei Conrad ist der preiswerteste Hubmagnet übrigens für 4,82€ zu bekommen: Conrad 503562 Selbst falls ich hier mit meiner AliExpress-Manie dem Einen oder Anderen 'auf den Keks' gehe, es geht ja durchaus um eine nennenswerte Stückzahl. Für ca. 110ct (incl. Einfuhrumsatzsteuer) habe ich welche gefunden: http://de.aliexpress.com/item/-/32252826678.html Bestromt ziehen die ihren Stößel aber rein, daher müsste man einen neuen Stößel (Kunststoff-Welle?) an der Rückseite anbringen.
Torsten C. schrieb: > Kai-Uwe schrieb: >> Da würde Mikroschritt evtl. Abhilfe schaffen, dann wird aber die >> Ansteuerung deutlich aufwendiger. > > Ich denke, soviel mehr Aufwand wäre das nicht. Wirklich aufwendig > empinde ich erst die Variante "c)die Stromaufnahme …"^^. > Aufwand ist relativ, dürften kamm 50 Zeilen code sein. >> stallGuard2 high precision sensorless motor load detection gives more >> information on the drive allowing functions like sensorless homing of >> the drive mechanics. > > @Fpga Kuechle: > "sensorless homing", dass ist doch das, was Du mit "c)" meintest, oder? Kenn ich nicht, beim ersten mal drüberlesen scheint es mir auch was anderes zu sein. Also ich stell mir das inzwischen so vor: Voraussetzung: -beim Umlauf eines zeigers ist die leistungsaufnahme des Motors nicht konstant -wenn die Spannung gleich bleibt genügt es die Stromstärke zu messen Kalibrierschritt: der zeiger läuft ab 12 komplett einmal um, der zeit - stromverlauf wird dabei erfasst und abgespeichert. Messschritt: der zeiger läuft ab der unbekannten Zeigerposition einmal um, Das sollte mit einem Stepper mit einer fixen Anzahl von pulsen für Vollkreis möglich sein. Auch dabei wird der strom- zeitverlauf erfasst. Normierung: falls die zeit resp. Anzahl samples für einen Vollkreis bei kalibrier und messschritt nicht gleich ist. muss eine zeitreihe entsprechend erweitert/verkürzt werden. Nennt sich neudeutsch samplerat konversation. Aber bei einem Stepper sollte es möglich sein jeweils die gleiche samplerate zu garantieren. Auswertung: a) Jetzt wird der erste wert Kalibrier mit dem ersten werte Mess multipliziert, dann das produkt aus den zweiten paar draufaddiert bis alle paare multipliziert und aufaddiert sind. die gesamtsumme wird gespeichert. b) a) wird wiederholt aber erste Kalibrierwert wird mit dem zweiten messwert multipliziert der zweite K-wert mit den dritten M-wert ... c) b) wird wiederholt jetzt mit den paaren k[n] und m[n+2] b) wird wiederholt jetzt mit den paaren k[n] und m[n+3] ... jetzt hat man eine reihe von produktsummen, neudeutsch man hat die Kalibrierreihe mit der Messreihe korreliert. http://de.wikipedia.org/wiki/Korrelation_%28Signalverarbeitung%29 jetzt sucht man das höchste der produkte, das stammt dann aus der summation dessen i aus k[n]*m[n+i] der aktuellen zeigerposition entspricht. ist mit einem mikrocontroller der ein paar kB RAM hat kein Problem, wenn es jetzt kompliziert rüberkommt dann liegt es wohl eher daran das ich kein großer Erklärer bin. Mit einem "Sensor" der eine definierte Zeigerposition erkennt ist das natürlich unnötig... aber wenn man schon einen uC mit ADU-wandler nimmt/hat braucht man den Sensor nicht. Statt einem zentralen Prozessor scheint es mir besser jeder uhr einen controller zu geben. die kontroller sind untereinander bei daisy chain verbunden. Das spart Verdrahtungsaufwand und verhindert Probs mit übersprechen etc. im Drahtverhau. Wenn das zuviel ist, der kann ja auch einen uC pro Uhr-Quartett/Duo nehmen. MfG,
In Beitrag #4117503 hatte ich einen Denkfehler. Sorry. Fpga Kuechle schrieb: > Kenn ich nicht, beim ersten mal drüberlesen scheint es mir auch was > anderes zu sein. Hört sich aber schon so an: > A load value … is available when moving the motor … Hier nochmal der Link: http://ttdg.trinamic.com/viewtopic.php?f=15&t=5237 Kai-Uwe schrieb: > aber ich könnte mir vorstellen, daß bei ansonsten stillem Raum > sehr störend wirken könnte, wenn 300 Stepper gleichzeitig verfahren. > Da würde Mikroschritt evtl. Abhilfe schaffen, dann wird aber die > Ansteuerung deutlich aufwendiger. Im Datenblatt des VID28-05 steht: > In partial-step driving mode, the motor can be directly driven > by a standard logic voltage level with less than 20mA current > consumption. 8-Bit-Schieberegister ¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Mit einem 74HC595-Schieberegister (Vorschlag von Sören Kleer), gingen also 1°-Schritte, also 360 Schritte pro Umdrehung. Das würde zwar reichen, aber die Nutzung von 'micro step' könnte trotzdem was bringen, um die Zeiger schneller und zuverlässiger beschleuligen zu können und weniger Geräusche zu erzeugen, wie Kai-Uwe oben schrieb. 16-Bit-Schieberegister ¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Im MCP23S17^^ ist ein 16-Bit Schieberegister. Man könnte auch zwei 74HC595 kaskadieren um auf 16 Bit zu kommen. Mit 100Ω-Vorwiderständen zwischen Motor und Schieberegister ließen sich damit auch verkleinerte Schritte umsetzen: Zwei Ausgänge pro Motoranschluss: * beide high: 5,0V * beide low: 0,0V * unterschiedlich: 2,5V Bei 'unterschiedlich' fließt zwar über die Vorwiderstände ein 25mA 'Kurzschluss-Strom', aber das wäre nur kurzzeitig. Unter Beachtung des 'Maximum current' für VSS und VDD (150 und 125 mA) wäre das eine Art "micro-step light". Stepper-Motor-Driver ¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Mit deutlich mehr Aufwand (Kosten, Baugröße, Spannungsversorgung) käme ein A4988 in Frage: Der A4988 kann bis zu ±2A und benötigt mindestens 8V 'Load Supply'. Davon würde man zwei Stück pro VID28-05, also pro Uhr benötigen. Fertig auf Breakout-PCBs wären das 2,18€ .. 2,48€ pro Uhr. Die billigeren sollten reichen, denn ein Kühlkörper ist bei 20mA sicherlich nicht nötig: http://www.aliexpress.com/item/-/1991404426.html Beim A4988 wird der Ausgangsstrom geregelt, der Sollwert für den Sinus-Spitzenwert wird über das Poti R9 eingestellt: http://www.robotshop.com/media/files/pdf/datasheet-1182.pdf Was haltet Ihr jeweils davon? Ich finde den A4988 etwas 'oversized'. Bei einem MCP23S17 käme man ohne 8V aus, also nur mit 5V. Dafür hätte man jedoch gröbere Schritte und keine richtige Strom-Regelung und mit den 100Ω-Vorwiderstände würden wir Drehmoment verschenken. Was meint Ihr?
Fpga Kuechle schrieb: > Aufwand ist relativ, dürften kamm 50 Zeilen code sein. Die 50 Zeilen hast Du sehr verständlich und ausführlich erläutert. :-) Das sehe ich auch so. Meine Worte 'wirklich aufwendig' bezogen sich aber auf die Hardware, also die Erfassung des Strom-Zeitverlaufes. Das hätte ich vielleicht dazu schreiben sollen, sorry. Fpga Kuechle schrieb: > … aber wenn man schon einen uC mit ADU-wandler nimmt … Geht das denn mit einem AD-Umsetzer (ADU)? Ich schätze, es sind wenigstens vier, aber eher vier differenzielle, also acht Analog-Eingänge. Und wie soll der Strom gemessen werden? Ich schätze, die Shunts sollten nicht so groß sein, dass man ohne mehrere Verstärker (OP-Amps) auskommt. An dieser Stelle hatte ich bis jetzt den wesentlichen Aufwand gesehen. Mit der 100Ω-Vorwiderstandand-Variante^^ und dem 16-Bit-Schieberegister könnte das jedoch auch ohne OP-Amps gehen, indem man die 8 Motor-Anschlüsse direkt an 8 Analog-Eingänge anschließt. Das wäre dann ein Pluspunkt für "micro-step light"^^. Aber es bleibt leider der Momenten-Verlust. PS: ¯¯¯ Der A4988 Stepper-Motor-Driver hätte 1/16°-Schritte, also 5760 echte 'micro-steps' pro Umdrehung. Die 'micro-step light'-Variante (mit 16 Bit Schieberegister) hätte 1/3°-Schritte, also 1080 'partial-steps' pro Umdrehung. Ob die Uhr mit zwei A4988 so viel leiser ist, als mit 1080 Schritten? Das müsste man wohl ausprobieren. Oder wie schätzt Ihr das ein?
Torsten C. schrieb: > Fpga Kuechle schrieb: >> Aufwand ist relativ, dürften kamm 50 Zeilen code sein. > > Die 50 Zeilen hast Du sehr verständlich und ausführlich erläutert. :-) > Das sehe ich auch so. > > Meine Worte 'wirklich aufwendig' bezogen sich aber auf die Hardware, > also die Erfassung des Strom-Zeitverlaufes. Das hätte ich vielleicht > dazu schreiben sollen, sorry. Hm, den Hardware-aufwand hatt ich eigentlich als vergleichbar mit dem sensor (Licht oder magnet) eingeschätzt und einen uC pro Uhr in allen Varianten vorausgesetzt. Das war mglw. voreilig. > Fpga Kuechle schrieb: >> … aber wenn man schon einen uC mit ADU-wandler nimmt … > > Geht das denn mit einem AD-Umsetzer (ADU)? > > Ich schätze, es sind wenigstens vier, aber eher vier differenzielle, > also acht Analog-Eingänge. Hm, ich dachte eigentlich an Gesamtstrom und nicht pro Spule. Eigentlich sogar nicht an einem Stepper sondern an einen Motor + Getriebe und Rundentick. > Und wie soll der Strom gemessen werden? Ich schätze, die Shunts sollten > nicht so groß sein, dass man ohne mehrere Verstärker (OP-Amps) auskommt. Hm ich dachte da an current sense IC: http://www.ti.com/product/ina193 MfG,
Ich schrieb: > Ich hoffe, es ist Konsens, dass das VID28-05 dann ggf. die Basis ist. Wobei das daran liegt, dass bisher keine besseren Vorschläge kamen. Aber was nicht ist … Damit es in Zukunft nicht mehr so viele Missverständnisse gibt: Welche Varianten sind denn noch 'im Rennen'? Bei dem VID69 sind nicht alle Zeigerstellungen möglich. Für irgendwas ohne koaxiale Wellen gibt es noch keinen konkreten Vorschlag, sondern nur, dass das mit einer Scheibe theoretisch auch irgendwie möglich wäre. Der VID28-05 hat koaxiale Wellen und alle Zeigerstellungen sind möglich. Fpga Kuechle schrieb: > ich dachte eigentlich … an einen Motor + Getriebe … An welchen genau? Und wie soll das mit den zwei Zeigern gehen? Dann wären das zwei Motoren + 2 Getriebe. Und dann mit einer Scheibe, oder wie? PS: ¯¯¯ Fpga Kuechle schrieb: > … einen uC pro Uhr in allen Varianten vorausgesetzt. > Das war mglw. voreilig. Nicht unbedingt, siehe Beitrag "Re: µC mit 1K SRAM für 24ct"
Kai-Uwe schrieb: >> Für jeden (VID28-05) werden somit 2 Ausgänge (1. Bit = Impuls; 2. Bit = >> Richtung) von einem Schieberegister benötigt(z.b. > Das stimmt nicht. Die Motoren enthalten 2 Spule Die Aussage war von Halbwissen geprägt ;) Man benötigt im grunde eine Frequenz, einen Impuls, eine Richtungsangabe und eine Motorangabe, wobei man die Motorangabe mit dem Impuls gleichsetzen könnte. Die Frequenz liegt dauerhaft an (Pin 2 und 3). Die Drehrichtung wird durch die Spannungsrichtung angegeben (Pin1 U+ Pin2 bzw. Pin1 U- Pin2). Da der Motor gerade mal 20mA benötigt, braucht man also im Grunde genommen bei einem Schieberegister "nur" 8x20mA = 160mA bei 5V 0,8W. Die Schieberegister haben glaube ich 0,5W als Maximale Ausgangsleistung... Muss man also einmal durchmessen. Wenn man aber genau hinsieht hätte man 4 Uhren an einem Schieberegister (Frequenz kommt über eine andere Leitung, durchgeschleift mit einem offset von 2,5V). Das Schieberegister hat also nur noch jeweils einen Pin für einen Motor (ein Zeiger). Die Signale am Schieberegister sind ebenfalls mit einem offset von 2,5V versehen und müssten nun entweder auf 3V oder 2V gesetzt werden, um eine Drehrichtung zu erzeugen. Die Dauer bestimmt den "microstep". So viel zur spontanen theorie. Torsten C. schrieb: > Mit einem 74HC595-Schieberegister (Vorschlag von Sören Kleer), gingen > also 1°-Schritte, also 360 Schritte pro Umdrehung. > > Das würde zwar reichen, aber die Nutzung von 'micro step' könnte > trotzdem was bringen, um die Zeiger schneller und zuverlässiger > beschleuligen zu können und weniger Geräusche zu erzeugen, wie Kai-Uwe > oben schrieb. Microschritte kann man doch per PWM ermöglichen oder irre ich mich da? Denn wenn es möglich ist, dann geht das auch mit Schieberegistern (über den Output Enable) Torsten C. schrieb: >> aber mit der Zeit läuft das auch dahin > > @Sören: Ich habe noch nicht verstanden, wie diese Worte gemeint waren. Sorry, ich habe das nicht weiter kommentiert weil du Recht hattest. Mein Gedanke war dahingehend falsch, da ich dachte, wenn es lange genug dreht kann jede Position von jedem Zeiger angefahren werden. Da sie aber Mechanisch gekoppelt sind, ist es nicht möglich den Minutenzeiger auf 2 zu haben und den Stundenzeiger auf genau 3. Achja, hier ein Reedsensor: http://www.alibaba.com/product-detail/magnetic-contact-switch-glass-reed-switch_1992792229.html Und hier viele kleine Magnete: https://www.mtsmagnete.de/neodym-scheiben-magnete/scheiben-1mm-9mm/ Wie groß der Magnet sein müsste oder wie gut der Reedsensor, müsste man natürlich alles austesten. Da irgendjemand geschrieben hat, dass ein Magnet im zeiger die Motoren zu sehr belasten könnte. Finde das Zitat gerade nicht mehr.
Sören Kleer schrieb: > ie Frequenz liegt dauerhaft an (Pin 2 und 3). Die > Drehrichtung wird durch die Spannungsrichtung angegeben (Pin1 U+ Pin2 > bzw. Pin1 U- Pin2). Ich habs 5 mal gelesen und nicht verstanden. Kann das bitte jemand nochmal anders erklären, der das verstanden hat? Oder kannst Du eine kleine Skizze (Schaltplan) machen, Sören? Sören Kleer schrieb: > Da irgendjemand geschrieben hat, dass ein > Magnet im zeiger die Motoren zu sehr belasten könnte. Es ging um die 'Unbalance' rechts unten im Bild VID28-05a.png^^. Ich habe die falsche Stelle gelb markiert. 10g sind das maximale Gewicht des Zeigers. PS: Aber 0.0067g-Magnete sind mir neu. Cool. :-)
Torsten C. schrieb: > Fpga Kuechle schrieb: >> ich dachte eigentlich … an einen Motor + Getriebe … > > An welchen genau? Und wie soll das mit den zwei Zeigern gehen? an irgendeinen motor pro zeiger ... > Dann wären das zwei Motoren + 2 Getriebe. > Und dann mit einer Scheibe, oder wie? Oder mit zwei Scheiben - hab ich oben als in einander geschachtelte Büchsen bezeichnet. Die Scheibe resp Büchse hat am aussendurchmesser einen Zahnkranz, resp. aufgezogenen /geklebten Zahnriemen auf dem sitzt dann die Motorachse mit Antriebsritzel. Also den da http://www.thomsweb.de/~anderl/E30_325i-Touring/Aktivitaeten/2012-07_Motorrevision/288_Zahnriemen-127.jpg umgekrempelt und auf die "Scheibe" gezogen. Ist eine Imrpvisationslösung vielleicht nicht praktikabl aber mglw. inspirierend. MfG, >> Das war mglw. voreilig. > > Nicht unbedingt, siehe > Beitrag "Re: µC mit 1K SRAM für 24ct" So billig hatt ich nicht erwartet, eher so 1-3 €.
Sören Kleer schrieb: > Wie groß der Magnet sein müsste oder wie gut der Reedsensor, müsste man > natürlich alles austesten. Ich hoffe, die 0.0067g-Magnete reichen. Ich habe mal welche bestellt. Ein Reed-Relais ist ziemlich 'digtal' (geht oder gehtnicht). Bei einem Hall-Sensor könnte man die Empfindlichkeit noch justieren. Der A3144 z.B. wird zwar nicht mehr hergestellt, aber er kostet unter 10 ct. bei Ali: http://www.allegromicro.com/~/media/Files/Datasheets/A3141-2-3-4-Datasheet.ashx Irgendwie wird man das "Maximum" schon heraus finden.
Thorten, evtl wirds hiermit verständlicher. Schau dir mal an die der angesteuert wird bzw das signalbild. Saß gestern locker 30 minuten davor bis ich da durchgestiegen bin. http://www.google.de/url?sa=t&source=web&cd=3&ved=0CCMQFjAC&url=http%3A%2F%2Fsearch.alkon.net%2Fcgi-bin%2Fpdf.pl%3Fpdfname%3D07087.pdf&rct=j&q=datasheet%20vid28-05&ei=bzJJVaPPLsy3swGR7YH4AQ&usg=AFQjCNGjTYTl3dxGrYHG-qCPdSpeRoJFBA&sig2=hYvi90sSkCmzAK0QnLTwdQ (sorry geht am Handy gerade nicht anders) Seite 6
Sören Kleer schrieb: > Seite 6 Nummus iactus est! Danke. :-) Dann kommt man zwar mit 6 Bits vom 'Shiftregister' aus, statt mit 8, aber der Ausgangsstrom vom Treiber reicht nicht für zwei Motor-Spulen. Viel bringt das also auf den ersten Blick nicht. PS: ¯¯¯ Auf den zweiten Blick könnte man Mosfet-Transistoren als Treiber nutzen und hätte beim MCP23S08 oder MCP23S17 Bits für den Hall-Sensor oder für den Hub-Magneten frei. PPS zum STM32F030F4P6 (46ct): ¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ > GPIOs can sink or source up to +/- 20mA (with a relaxed V_OL/V_OH). Spätestens damit wäre es wohl eh alles egal. Der hat 15 GPIOs. PPPS: ¯¯¯¯¯ Sören Kleer schrieb: > Mach mich gleich nochmal auf die suche nach einem Motor ohne internal > stopp. Schon was gefunden? PPPPS: ¯¯¯¯¯¯ @Stefan H.: Seitdem ich 0.0067g-Magnete kenne, ist Deine "Bauern-Lösung" leider nicht mehr mein Favorit. Jetzt habe ich 10 Stück von diesen 'China-Hubmagnet.jpg' bestellt. :-( Mal sehen, wofür ich die noch benutzen kann. Vielleicht für einen WebCam-Flipper-Automaten mit ESP8266?
Hallo Torsten, nach kurzem drüber nachdenken sind sie auch nicht mehr mein Favorit. Das mit den Magneten und kleinen Reed-Kontakten hört sich sehr straightforward und damit realisierbar an - und ist noch eleganter und kostengünstig. Eine Frage an Leute die schon mal damit gearbeitet haben: Könnte man die vorbeilaufenden Zeiger kapazitiv erfassen, beispielsweise mit Qtouch? Damit könnte man zumindest den Hardwareaufwand extrem gering halten. Grüße, Stefan
Angehängte Dateien:
Sören Kleer schrieb: > Microschritte kann man doch per PWM ermöglichen oder irre ich mich da? > Denn wenn es möglich ist, dann geht das auch mit Schieberegistern (über > den Output Enable) Erfahrungen damit muss ich erst noch sammeln. Weiss das jemand genauer? Grundsätzlich scheint das zu gehen, siehe Microchip AN1307: http://ww1.microchip.com/downloads/en/AppNotes/01307A.pdf Ich hätte aber Bedenken, das 'über den Output Enable'^^ zu steuern, da die Motor-Induktivitäten beim 'abschalten' ihren Strom weiter fließen lassen wollen (vgl. Zündspule im Auto). Statt Freilaufdioden einzusetzen, macht es m.E. mehr Sinn, die Schieberegister-Ausgänge (oder die GPIOs) nie hochohmig zu schalten. Ich wollte übrigens im gelöschten Beitrag #4117503 auch erst Tristate-Ausgänge vorschlagen, habe den Beitrag aus o.g. Gründen aber wieder gelöscht. Siehe Bild. BTW: Den Widerstand (gelber Kringel) könnte man vielleicht als Shunt benutzen, um die Last (das Drehmoment) zu ermitteln, ähnlich wie im '50-Zeilen-Code'^^ beschrieben. Dann käme man mit zwei Analog-Eingängen aus und benötigt keine acht.
Torsten C. schrieb: > ☞ J-A von der Heyden ☜ schrieb: >> Magnete auf den Wellen, zusammen mit Hall-Sensoren > > Das hatte Sören Kleer schon vorgeschlagen, aber ich befürchte, dann > werden die Zeiger zu schwer (siehe 'parameter of the pointer'). Ja, er meinte aber Reed-Schalter. Ich meine ja Signalauswertungen wie z.B. mit Hallsensoren, die doch eine zum Magnetfeld proportionale Spannung liefern können. Ein Magnet müsste dafür nicht zwingend auf dem Zeiger sitzen. Und Hubmagnete? Wie soll sowas etwas drehen?
Ah, ich sehe gerade: Otto hatte am 08.04. auch schon Reed-Kontakte vorgeschlagen. Hall-Sensoren sind wie gesagt ^^ auch meiner Meinung nach besser geeignet. ☞ J-A von der Heyden ☜ schrieb: > Ein Magnet müsste dafür nicht zwingend auf dem Zeiger sitzen. Stimmt, wenn der Zeiger ferromagnetisch ist. Oder meist Du, dass das z.B. auch mit Aluminium ginge? Aktuell sind Zeiger aus 2.55mm Acrylic/Plexigals mein Favorit, da ich die - fertig gelasert - nicht weiter nachbearbeiten muss. Außer ggf. den Magneten drauf kleben, vielleicht in ein Sackloch. > Und Hubmagnete? Wie soll sowas etwas drehen? Der Hubmagnet sollte sich nicht drehen. Er war als 'aktivierbarer Anschlag' für das 'homing' (kalibrierung) gedacht. Das steht oben aber alles im Thread.
Kai-Uwe schrieb: > Ich habe schonmal ein Projekt mit dem VID29 gemacht, der die > "Einfachversion" des VID28 darstellt. @Kai-Uwe: Du hast doch sicher einen Digital-Messschieber, oder? Könntest Du mir die Durchmesser der beiden Achsen am VID29 sagen? Ich hoffe, die sind zum VID28 identisch. Oder sieht sonst jemand eine Chance, die Durchmesser zu ermitteln? Wenn ich jetzt die DXL-Dateien für die Zeiger nach China schicke, kommen die Zeiger vielleicht schon zusammen mit meinen bestellten VID28-05 an und ich verliere nicht unnötig Zeit. BTW @'Uhr wie im Ham Yard Hotel in London (Gast)': Du hast Dich am 8.04.2015 zuletzt gemeldet und ich habe das Gefühl, wir haben / ich habe Deinen Thread ungewollt gekapert. Bist Du noch dabei? Ist das OK oder eher nicht?
Torsten C. schrieb: > ☞ J-A von der Heyden ☜ schrieb: >> Ein Magnet müsste dafür nicht zwingend auf dem Zeiger sitzen. > > Stimmt, wenn der Zeiger ferromagnetisch ist. Oder meist Du, dass das > z.B. auch mit Aluminium ginge? nö, aber ein Magnet auf der Welle könnte sich drehen. Die Welle ist dann aus Plastik oder Alu, Jedenfalls etwas, das das Magnetfeld nicht beeinflusst. Der Magnet dann da ran geklebt. Geḱlebte Magnete hast in jedem CD-DVD-Player. Das liesse sich dann auswerten. Entsprechende Sensoren können je nach anliegendem Pol des Magneten eine positive oder negative Spannung ausgeben. maximal + könnte 12Uhr Position sein, max Minus dann 6Uhr. nun wird das nicht mit nur je einem Sensor pro Zeiger gehen, also mindestens 2. Dann können Magnete auch sektorierte Felder haben, nicht nur 1x Nord und 1x Süd. (schon mal alte Motor-Magnetscheiben aus Videorecordern gesehen?) also ich denke es gibt eine vielzahl von Möglichkeiten wie man das auswerten kann. Mit dem nötigen Hirnschmalz (der mir hier auch für für Programmierungen fehlt) dürfte das per Materialkosten auch garnicht teuer sein.
Ich weiß nicht was ich von den Hallsensoren halten soll. Ich denke ein analoges Signal auszuwerten is zu ungenau, allerdings habe ich damit noch nicht Erfahrung gesammelt. Allerdings denke ich dass es reicht wenn man 1 Singal pro 360° hat, da man auch bei kleinen Schrittmotoren und guter Programmierung von Genauigkeit ausgehen können sollte. Ich hab mich noch nicht so sehr mit den Microschritten befasst, denke allerdings dass Dies einfach nur eine schrittweise Annäherung an die eigentliche Spannung für einen Step ist. PWM macht im Grunde genau dies. Beispiel: Full Step = 100ms bei 5V (gut geschätzt) Microstep = 10 steps a 0,5V (alle 10ms + 0,5V) Im Grunde ist nach der gleichen Zeit dadurch der gleiche radiale Grad erreicht, allerdings "schonender". Mit PWM würde das folgendermaßen passieren. PWM bau darauf auf, das nicht analog die Spannung (Upp) geregelt wird, sondern theoretisch über die Zeit. Heißt bei PWM kann man auch nur 5V oder 0V anlegen. Für 10ms die 5V auf theoretisch 0,5V zu bekommen muss man lediglich für diesen Bereich 1ms 5V anlegen und eine Pause für 9ms. Danach wird die Spannungszeit und Pausenzeit verschoben auf 2ms und 8ms, etc. pp.. --10ms--,--20ms--,--30ms--,--40ms--,--50ms--... 1ms+9ms-,2ms+8ms-,3ms+7ms-,4ms+6ms-,5ms+5ms-... __0,5V__,__1,0V__,__1,5V__,__2,0V__,__2,5V__... Hoffe ich konnte das Prinzip einigermaßen verständlich erklären. Beim shiftregister schiebt man ja die Bits erstmal komplett durch und gibt diese dann per Output Enabled auf einmal frei. Dadurch dass man ja möchte, dass jeder Motor gleichzeitig angesteuert wird, würde sich diese Methode eben anbieten. Die Dinger sind verdammt fix ;) Müsste man aber wie alles, eben noch austesten. Torsten C. schrieb: > Oder sieht sonst jemand eine Chance, die Durchmesser zu ermitteln? Jup, hier: http://www.vid.wellgain.com/UploadFile/pdf/product/20090905105654VID28-05%20V2070829.pdf
Torsten C. schrieb: > Kai-Uwe schrieb: >> Ich habe schonmal ein Projekt mit dem VID29 gemacht, der die >> "Einfachversion" des VID28 darstellt. > > @Kai-Uwe: Du hast doch sicher einen Digital-Messschieber, oder? Könntest > Du mir die Durchmesser der beiden Achsen am VID29 sagen? Ich hoffe, die > sind zum VID28 identisch. Ich habe sogar einen analogen und einen digitalen Meßschieber. Die WELLE (eine Achse ist am Handwagen oder auf dem Millimeterpapier) am VID28 hat einen Durchmesser von 1,0mm. Und das kann nicht identisch zum VID29 sein, da dieser ja einen inneren und einen äußeren Abtrieb mit unterschiedlichen Durchmessern hat. Also zumindest der "Stundenzeiger" muss ein größeres Loch haben... > Oder sieht sonst jemand eine Chance, die Durchmesser zu ermitteln? Klingt abwegig, aber wie wäre es mit "ins Datenblatt schauen"? Also ich lese da: innere Welle d=1,5mm, äußere Welle d=4,0mm http://www.vid.wellgain.com/UploadFile/pdf/product/20090905105654VID28-05%20V2070829.pdf zum Betrieb mit Schieberegister: pro Motor müsste es ein eigenes Register geben, da zum Beschleunigen und Bremsen ein individueller Takt benötigt wird. Sowas gibts übrigens hier und passt perfekt zu diesem Motor (weil dafür gemacht): http://www.vid.wellgain.com/UploadFile/down/2009111391710_VID6608%20manual%20060927.pdf Damit braucht man dann wirklich nur noch 2 uC Pins pro Motor. Die Lageerkennung über CurrentSense halte ich für viel zu ungenau, ich würde das per Reflexlichtschranke oder nur Fotosensor + Umgebungslicht machen. Dafür braucht man nur ein winziges Loch (evtl. mit sowas wie einer Lightpipe verschlossen), bei IR kann die Abdeckung auch dunkel sein. Dann Zeiger 1 solange fahren bis Lichtminimum, Zeiger 1 definierten Winkel verdrehen und dann Zeiger 2 fahren bis Minimum. Grüße K-U
Sören Kleer schrieb: > Ich denke ein analoges Signal auszuwerten is zu ungenau Ich denke anders: Mit einem Hall-Sensor man kann wunderbar Maxima bestimmen. Unterschiedliche Größenordnungen von Feldstärken kann man durch die Messelektronik ausgleichen. Ein Reed-Relais setzt einen gewissen Feldstärke-Bereich voraus und ist daher bei der Dimensionierung weniger flexibel. Allerdings bin ich dabei gedanklich eher beim STM32F030F4P6 mit integriertem 12-bit-ADU als beim 74HC595. Kai-Uwe schrieb: > Klingt abwegig, aber wie wäre es mit "ins Datenblatt schauen"? Total abwegig!! ;-) Ich bin zu doof zum Suchen. Sören Kleer schrieb: > Jup, hier: Ich danke Euch! :-) > eine Achse ist am Handwagen oder auf dem Millimeterpapier Jetzt erinnere ich mich wieder. Grrr. > Sowas gibts übrigens hier und passt perfekt zu diesem Motor (weil dafür > gemacht): Cool! Also: Welchen Chip sollten wir nehmen? Ich schreibe jetzt einfach mal 'wir' für die VID28-05-Fraktion: €1,82: http://www.aliexpress.com/item/VID6608/32330889625.html €0,04: http://www.aliexpress.com/item/74HC595/1998330075.html €0,54: http://www.aliexpress.com/item/STM32F0/32219942767.html Letzterer wäre ein µC, der auch das 'homing' (die Kalibrierung) autark erledigen könnte. > bei IR kann die Abdeckung auch dunkel sein Ein Loch ist auch dunkel. Das Ziffernblatt soll aber auch weiss sein können oder aus Sperrholz^^, finde ich. Und dann sehen Löcher oder Lightpipes doof aus. Zu 'optisch oder Hall-Sensor' habe ich den genannten Argumenten ('das blöde Loch'^^) nichts hinzuzufügen und favorisiere einen Hall-Sensor mit 0.0067g-Magnet im Zeiger. ☞ J-A von der Heyden ☜ schrieb: > aber ein Magnet auf der Welle könnte sich drehen. Auf der kurzen Welle eines VID28-05? Wie soll das gehen? Ich frage, weil ich immer vom VID28-05 ausgehe, daher ich schrieb: >> Ich hoffe, es ist Konsens, dass das VID28-05 dann ggf. die Basis ist. > Damit es in Zukunft nicht mehr so viele Missverständnisse gibt: > Welche Varianten sind denn noch 'im Rennen'?
ab welchen Rotationsgeschwindigkeiten würden Tachosignale Sinn machen? sicher nicht bei der Zeigergeschwindigkeit selbst, aber die Geschwindigkeit einer möglichen Motorwelle dürfte doch ausreichen. btw >Ich denke ein >analoges Signal auszuwerten ist zu ungenau. zumindest kompliziert. Ungenau nur je nach Aufwand. z.B. PLL-Schaltungen lassen sich auch analog bauen. Das konnte man schon in Gipskrieg. sprich mit Röhren. aber wenn ich mir "digital-Leute" so anschaue, die denken oft genug auch kompliziert. Lass die mal ein Pamphlet schreiben, wo man gewisse "Handgriffe" erklärt bekommen soll. weia!
Stefan H. schrieb: > Üblicherweise versucht man aber, Zeiger möglichst gut auszuwuchten um > eben unterschiedliche Belastungen des Motors zu vermeiden. Mit Zeigern wie oben in 'kontrastverstaerkt.png' und dem VID28-05 habe ich genau deshalb ein Problem. Die zulässige 'Unbalance' (siehe Bild VID28-05a.png) beträgt 0,025mNm. Ein entsprechender 5cm langer Kunststoff-Zeiger (1,19g·cm⁻³) wiegt zwar nur 0,24 Gramm, erzeugt aber 0,08mNm! (Dicke = 0,5mm, Breite = 8mm) Ohne Gegengewicht bekommt man '0,025mNm' mit den VID28-05 nicht hin! ☞ J-A von der Heyden ☜ schrieb: > Sind das eigentlich nur Zeiger oder evtl auch durchsichtige Scheiben, > wo nur schwarze Balken drauf (gedruckt, geklebt) sind? Sind es im Original zwar nicht, aber damit könnte man das Unbalance-Problem lösen. Eine 10mm-Scheibe aus Acryl könnte bis zu 1mm dick sein, um unter dem Maximum von 10g zu bleiben. Und nun?
Torsten C. schrieb: > Die zulässige 'Unbalance' (siehe Bild VID28-05a.png) beträgt 0,025mNm. Wie kommst du auf den Wert? Ich finde das nicht. Der vid ist für fahrzeuginstrumente ausgelegt, darf man auch nich vergessen
Sören Kleer schrieb: > Ich finde das nicht. Das ist nicht Dein Ernst! Das Bild 'VID28-05a.png' findest Du oben im Beitrag "Re: Uhr wie im Ham Yard Hotel in London" Der Drehmoment-Wert steht unten rechts im Bild. Das Bild stammt von Seite 5 aus dem Stepper Motor Manual. Hier nochmal die Datenbläter des VID28-05 Stepper Motor (Manual und Abmessungen): http://search.alkon.net/cgi-bin/pdf.pl?pdfname=07087.pdf http://www.vid.wellgain.com/UploadFile/pdf/product/20090905105654VID28-05%20V2070829.pdf Torsten C. schrieb: > Der A3144 z.B. wird zwar nicht mehr hergestellt, aber … Mist sorry, der hat ja auch Schaltschwellen, wie ein Reed-Relais. :-( Um ein 'Maximum' auf einem Analog-Signal zu finden, braucht man einen Linear Hall-effect Sensor (SS49E): http://sensing.honeywell.com/index.php?ci_id=50359 Die 0.0067g-Magnete sind gestern angekommen. Die Feldstärke ist nicht sehr groß. Daher vielleicht lieber gleich einen 3-Achsen-Sensor (HMC5883L): http://www51.honeywell.com/aero/common/documents/myaerospacecatalog-documents/Defense_Brochures-documents/HMC5883L_3-Axis_Digital_Compass_IC.pdf @Kai-Uwe: Hier sind es aber Achsen . :-) HMC5883L für €0,48 .. €0,73/piece: http://www.aliexpress.com/item/-/2034413541.html SS49E für €0,10/piece: http://www.aliexpress.com/item/-/32296424358.html Sören Kleer schrieb: > Der vid ist für fahrzeuginstrumente ausgelegt, darf man auch nich > vergessen. Das stimmt, einen Versuch ist es wohl wert. Ich befürchte, ich muss mir aber die 2,55mm-dicken Zeiger abschminken: http://www.seeedstudio.com/service/index.php?r=st/specification#lasercutting 0,5mm würden ja ausreichen und seeedstudio hätte eh keine in Schwarz gahabt.
Hi Thorsten, sorry, ich hab einfach nach "-05.png" gesucht, habe das "a" übersehen, daher hab ich es nicht gefunden ;)
Falls diese Projektidee einschläft, hier noch ein paar alternative Ideen für Uhren: http://minimalissimo.com/page/1/?s=clock (weiter blättern) http://montre24.com/watchmagazine/90/ (Mitte der Seite) Will eigentlich jemand die Ham-Yard-Hotel-Uhr bauen? Mich persönlich interessiert erstmal nur die Herausforderung, ein 'proof of concept' mit vielleicht 2 oder 3 Uhren-Elementen aufzubauen.
Angehängte Dateien:
-

Multiclock_schematic.png
8,6 KB -

Multiclock_layout.png
12 KB
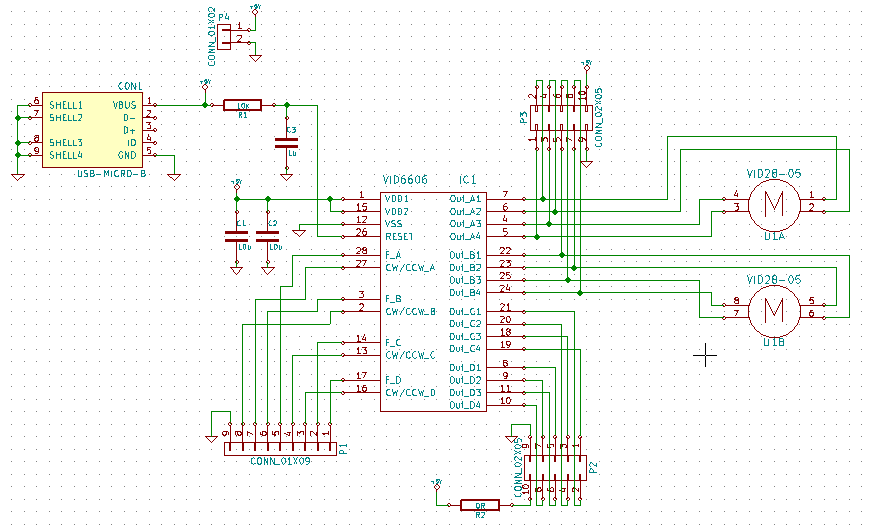
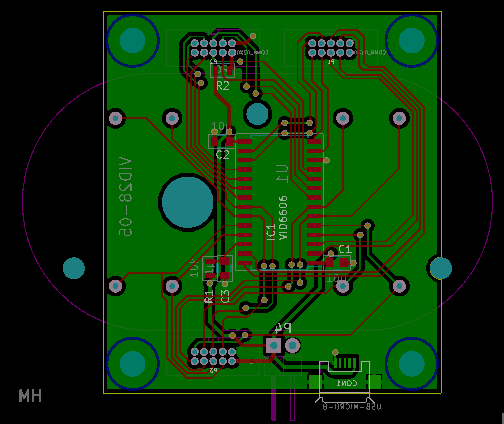
Hallo, ich hatte vor einigen Monaten bereits die Idee diese Ham Yard Uhr nachzubauen. Aus kostengründen plane ich mit "nur" 27 (3*9) Uhren. Ich habe mir dafür auch die Vid28-05 Motoren gekauft. Erstmal 2 Stück zum experimentieren. Dazu VID6608 als Treiber. Zur Steuerung hab cih einen STM32F4 vorgesehen. Sehr weit bin ich damit noch nicht gekommen. Ich habe eine Platine für jeden Motor gemacht die dann wieder mit Flachbandkabeln zum STM32 verbunden werden sollen. Über die Homing geschichte hab ich mir noch keine Gedanken gemacht. Ich hoffe das ich keine Schritte verliere und ich mit seltenem manuellen Homen auskomme. Aber das werde ich noch testen müssen ob ich mich wirklich darauf verlassen kann keine Schritte zu verlieren. gruß, klettern g.
Hallo, ich habe überigens aus den VID28-5 die Anschläge ausgebaut. Ist eigentlich keine schwierige Sache. Aber bei so vielen Motoren wird der Aufwand doch groß... gruß, klettern g.
Die Uhrendesigns sehen natürlich nicht schlecht aus. Hingucker, hat nicht jeder. Dennoch finde ich sollte die Uhrzeit ohne "Radebrechen" erkennbar sein.
Hallo, kleines Update: ich hab jetzt mal einen VID28-5 in betrieb genommen. Hier ein Video davon: http://somevid.com/EkyQeDkN Ich hatte mir hier etwas ruhigere Bewegungen erwartet. Bei 12 Schritten pro Grad wundert es mich das man das doch so deutlich die Zeiger zittern sieht. Im Video drehen sich die Zeiger mit 50°/s. Bei höheren Geschwindigkeiten scheinen die Motoren/Zeiger ins schwingen zu geraten, was man deutlich hört und sieht. Aber wesentlich höhere Geschwindigkeiten machen für die Uhr wohl eh keinen Sinn.. Ich habe die Routine wie im Video zu sehen jetzt 2h laufen lassen, ohne das ich feststellen könnte das Schritte verlohren gehen. Ich denke also, dass man sich Sensoren fürs Homing getrost sparen kann. gruß, klettern g.
Klettern Gehen schrieb: > Ich hatte mir hier etwas ruhigere Bewegungen erwartet Auf dem Video sehen die Bewegungen schön ruhig aus. Klettern Gehen schrieb: > Dazu VID6608 als Treiber. Auf dem PCB ist ein VID6606 und kein VID6608. Cool, der ist ja sogar noch prieswerter als der VID6608 und kann sogar vier Motoren. Kannte ich bis eben noch gar nicht. :-) http://www.aliexpress.com/item/-/32341801022.html Also nur 50 Cent zur Ansteuerung eines VID28-05 > Zur Steuerung hab ich einen STM32F4 vorgesehen. Heute sind meine STM32F030F4P6 gekommen, erstmal auf einem Breakout. Als IC kostet der ja auch nur 50ct, daher werde ich mir den VID6606/VID6608 wohl sparen. Das Zittern kommt vielleicht durch ein ständiges Abbremsen und Beschleunigen der Zeiger in jedem Microschritt, weil für langsame Bewegungen der Strom zu groß ist. Falls meine VID28-05 irgendwann mal ankommen, kann ich ja mal mit PWM experimentieren, ob ich die Zeiger mit dem STM32F0 auch zitterfrei bewegt bekomme. Wie schwer sind Deine Zeiger? Kannst Du abschätzen, ob 2,55mm dickes Acryl von seeedstudio gehen würde? http://www.seeedstudio.com/service/index.php?r=st/specification#lasercutting
Torsten C. schrieb: > Auf dem PCB ist ein VID6606 und kein VID6608. Cool, der ist ja sogar > noch prieswerter als der VID6608 und kann sogar vier Motoren. Kannte ich > bis eben noch gar nicht. :-) Ja, stimmt. Ich habe das PCB auch so gemacht, dass man 2 davon verbinden kann und auf einem den vid6606 unbestückt lassen kann. Der Treiber kann ja schließlich 4 Motoren ansteuern. Torsten C. schrieb: > Heute sind meine STM32F030F4P6 gekommen, erstmal auf einem Breakout. Als > IC kostet der ja auch nur 50ct, daher werde ich mir den VID6606/VID6608 > wohl sparen. Bin gespannt wir gut das ohne Treiber funktioniert. Bitte unbedingt berichten! Torsten C. schrieb: > Das Zittern kommt vielleicht durch ein ständiges Abbremsen und > Beschleunigen der Zeiger in jedem Microschritt, weil für langsame > Bewegungen der Strom zu groß ist. Kann sein. Allerdings ist das zittern/schwingen bei höheren Geschwindigkeiten deutlich stärker. Ich werde mal versuchen die Spannung zu verringern- mal sehen ob das was bringt.. Aber weniger als 4.5v geht glaub ich laut Datenblatt nicht. Torsten C. schrieb: > Wie schwer sind Deine Zeiger? Kannst Du abschätzen, ob 2,55mm dickes > Acryl von seeedstudio gehen würde? Schwer zu sagen. Meine "Zeiger" sind <1mm dick und nur ca50mm lang. Also mit Sicherheit leichter als dein Acryl. Ob der Motor das packt oder nicht kann ich aber nicht sagen.
Angehängte Dateien:
-

Potenzial.jpg
47 KB

klettern g. schrieb: > Meine "Zeiger" sind <1mm dick und nur ca50mm lang. Also > mit Sicherheit leichter als dein Acryl. Lässt Du die irgendwo machen? Tom K. schrieb im Beitrag "Re: Laserschneideservice für Kunststoff?" > www.formulor.de Da gibt es 0,8mm Polypropylen in Schwarz. Ich denke, das passt! In diesen VID28-05 & Co. steckt noch Potenzial. Dise "Uhr" im Bild (monoqi.com) mit DHT22 würde mir auch gefallen.
Angehängte Dateien:
-

IMG_20150517_143747_1.jpg
160 KB
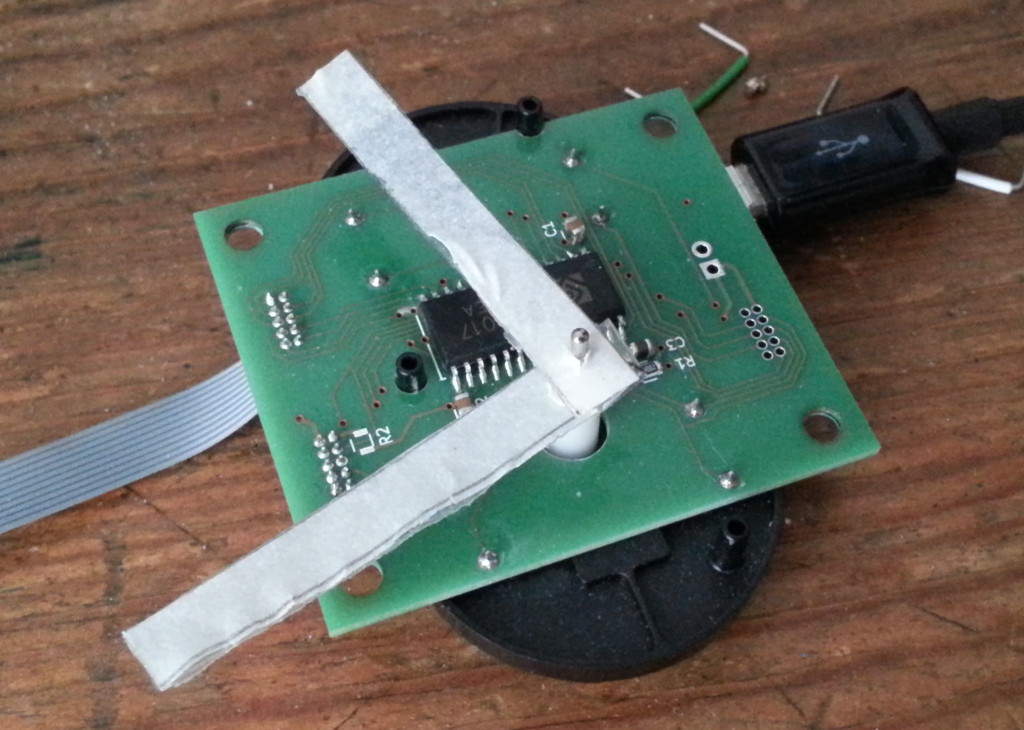
Torsten C. schrieb: > klettern g. schrieb: >> Meine "Zeiger" sind <1mm dick und nur ca50mm lang. Also >> mit Sicherheit leichter als dein Acryl. > > Lässt Du die irgendwo machen? Bisher nicht. Ich habe nur von meinen improvisierten Zeigern geschrieben. Siehe Bild. Für den Prototypen/ProofOfConcept könnte man die Zeiger auch mit der Laubsäge sägen. Nur müsste ich mir dann erstmal das Basismaterial holen.. Da wäre das Laserschneiden lassen schon wieder interessant.. Torsten C. schrieb: > Tom K. schrieb im Beitrag "Re: Laserschneideservice für Kunststoff?" >> www.formulor.de > > Da gibt es 0,8mm Polypropylen in Schwarz. Ich denke, das passt! Hört sich gut an!
Die 0,8 mm lassen sich auch mit einem Papierschneider sauber schneiden, bei den einfachen rechteckigen Form sollte das kein Problem sein. Das Video sieht doch schon gut aus, aus > 1m sieht man bestimmt kein ruckeln.
Schönes Projekt... Ich würde jede der Spulen zwischen zwei PWM-Ausgänge klemmen und in die PWM-Register (mit einem Timer) aus einer Sinus-Lookup-Table Werte schreiben. Bei gleichem Register-Inhalt ist der Strom null. Wenn R0=0 und R1=max, max. Strom in eine Richtung Wenn R0=max und R1=0, max. Strom in die andere Richtung Je häufiger der nächste Wert der LUT genommen wird, umso schneller dreht der Zeiger. Oder mit DDS. Da der µC sonst nicht viel zu tun hat, könnte auch SoftPWM an normalen PortsPins klappen.
Ja, genau. Nur: eProfi schrieb: > Oder mit DDS Mit DDS müsste eigentlich ein Stromsignal synthetisiert werden. Da das mehr Hardware bedeutet als ein einfaches PWM aus einem Push-Pull-Ausgang (GPIO) gegen die Motor-Indunktivität und am Ende aufs Gleiche hinausläuft, würde ich mit PWM anfangen. Macht 'Bit Angle Modulation' Sinn? Oder nimmt man die nur bei LEDs? https://www.mikrocontroller.net/attachment/207919/BitAngleModulation.pdf
klettern g. schrieb: > Bin gespannt wir gut das ohne Treiber funktioniert. Bitte unbedingt > berichten! Bis eben war der STM32F030F4P6^^ eine 'fixe Idee', aber es passt wohl bis zum letzten verbrauchten Pin, mit 'SoftPWM', wie eProfi^^ bereits schrieb. Ich hoffe, ich habe nix vergessen:
1 | ADC_IN1 → Hall-Sensor (oder Capa-Sensor) |
2 | PA0 → PWM ❶ |
3 | PA10 → PWM ❷ |
4 | PA2 → PWM ❸ |
5 | PA3 → PWM ❹ |
6 | PA4 → SPI NSS |
7 | PA5 → SPI SCK |
8 | PA6 → SPI MISO |
9 | PA7 → SPI MOSI |
10 | PA9 → PWM ❺ |
11 | PB1 → PWM ❻ |
12 | PF0 → PWM ❼ |
13 | PF1 → PWM ❽ |
ADC-Eingänge für 'Strom-Sensoren' habe ich nun nicht mehr frei. :-( Aktuell in diesem Zusammenhang ist auch der Beitrag "Schrittmotor Strom"
Angehängte Dateien:
-

Rotor001.jpg
84 KB -

AndererDoppelSchrittmotor.jpg
200 KB -

MeinDoppelSchrittmotor.jpg
240 KB -

3phase-rmf-60fv2-airopt.gif
220 KB
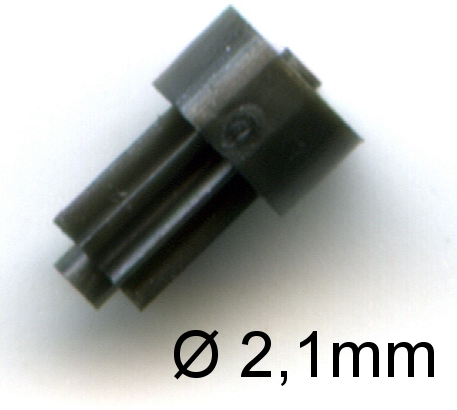

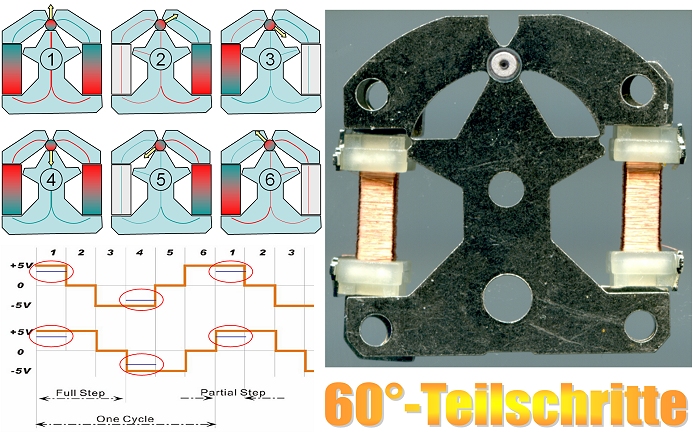
Bis ich den 'Motor' aus dem VID28 in der Hand gehalten habe, hatte ich mir wegen der Anseuerung noch Gedanken über das Massenträgheitsmoment des Rotors gemacht. Das Massenträgheitsmoment vom 2,1mm-Rotor kann man vernachlässigen! Der Rotor wiegt weniger als 0,1 Gramm. Unter nanotec.com gibt es keine entsprechende Simulation, die Vektoren sehen wohl so ähnlich aus wie in '3phase-rmf-60fv2-airopt.gif' (animiert, Quelle: commons.wikimedia). Es gibt auch andere Doppel-Schrittmotoren mit 45° Teilschritt (Bild). Kennt die jemand? Wo gibt es die? Ich denke, die Spannung zur Ansteuerung sollte von der Beschleunigung der Zeiger abhängig sein. Beim STM32F030F4P6 hat man nur 3,6V zur Verfügung, daher arbeite ich gerade an einer Variante, die bis zu 10V kann. In Schritt 1 und 4 (MeinDoppelSchrittmotor.jpg, rote Kringel) sollte die Spannung m.E. nicht 5V sondern nur 3,54V betragen, oder?
> Mit DDS müsste eigentlich ein Stromsignal synthetisiert werden.
???
DDS meint ein Verfahren mit Phasenakkumulator:
Du hast eine überlange Sinustabelle, auf die Du mit einem
Ganzzahl-Anteile eines FixedPoint-Akku zugreifst (zwei verschiedene
Offsets für Sin und Cos). Die zwei ausgelesenen Werte werden mit der
Geschwindigkeit zum Anpassen des Stromes multipliziert und in die
PWM-Register geschrieben.
Überlang (1,25) habe ich sie gemacht, damit ich nur eine Tabelle (ohne
Sonderbehandlung) für Sin und Cos brauche.
Je höher die Zahl, die (z.B. bei jedem PWM-Cycle oder in einer anderen
periodischen ISR) in den Akku addiert wird, umso schneller steppst Du
durch die Tabelle, umso schneller dreht sich der Motor.
Zum Rückwärtsdrehen eine negative Zahl addieren.
Zum Stehenbeleiben 0 addieren ;-)
Angehängte Dateien:
-

VID28-als-Generator.png
8,6 KB
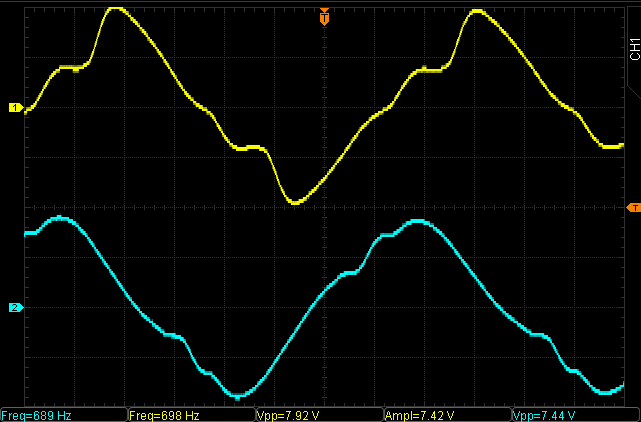
eProfi schrieb: >> Mit DDS müsste eigentlich ein Stromsignal synthetisiert werden. > ??? Sinustabelle usw. ist klar. Ich dachte zunächst: Eigentlich will man ja einen Stromverlauf erzeugen und keinen Spannungsverlauf synthetisieren. Ich habe aber keinen Plan, wie man das am besten machen würde. Bei meinen ersten Versuchen, den Strom vorzugeben, hatte ich natürlich nette Schwingkreise. Ich hätte also einen richtigen PID-Stromregler aufbauen müssen. Oder macht man das vielleicht irgendwie mit einem 'Current Feedback Op Amp'? Zu aufwendig! Wie gesagt, ich dachte. eProfi schrieb im Beitrag "Re: Schrittmotor Strom" > Bei manchen Antrieben bin ich sogar wieder dazu übergegangen, Stepper > nicht mit konstantem Strom, sondern mit relativ konstantem PWM > anzusteuern. Dann nimmt sich der Motor den Strom, den er braucht. Also gebe ich dem VID28 auch nur die Spannungen vor. Oder? Siehe Bild: Ist Sinus wirklich richtig? Ich habe den VID28 mal mit einem Akkuschrauber gedreht. Das sieht eher aus wie ein Dreieck, als wie ein Sinus. BTW: Direkt an den STM32F030F4P6^^ anschließen kann man sich für dieses Projekt wohl sparen. Auch der VID6606 ist mit seinen 5V zu schwach auf der Brust. Bei 700Hz ist ja schon die Induktionsspannung bei knapp 8V. Also werde ich wohl pro Motor-Achse einen 16-Bit-Stereo-DAC PT8211 nehmen und die Signale per OP-Amp auf 10V verstärken. Oder? Die PT8211 sind jedenfalls billiger als ein Haufen PWM-Ausgänge mit H-Brücken.
Angehängte Dateien:
-

Zwei-Mini-PCBs.png
15 KB
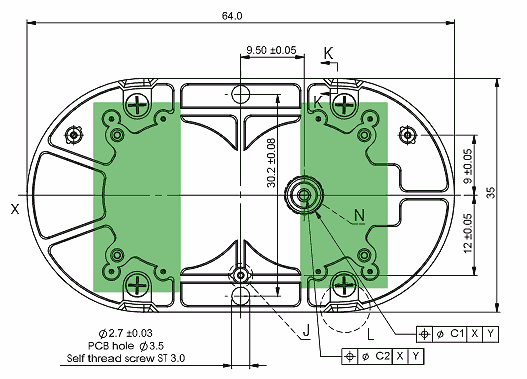
PS: eProfi schrieb: > Oder mit DDS. Ich dachte erst, Du meinst damit, als Analog-Signal, wie beim AD9851 usw. Aber ich hatte den nächsten Satz nicht richtig interpretiert: > Da der µC sonst nicht viel zu tun hat, könnte auch SoftPWM an normalen > PortsPins klappen. Mein gescheiterter Versuch mit dem 'Strom-Ausgang' hatte ein analoges Spannungs-Signal als Sollwert-Vorgabe, kein PWM. Daher das Missverständnis und Deine '???'. http://easyeda.com/editor#id=5WsmEysK2 Wenn man den PT8211^^ nimmt und auf Sensoren (Strom, Homing, ...) verzichtet, könnte man sogar mit einem 4-fach OP-Amp und einem Stereo-DAC pro Motor auskommen und die Platinen kleiner machen: Zwei PCBs á 27x13mm. Ob man 270 PT8211 für 135 Uhren jedoch mit einem einzigen µC schafft?
Ich schrieb: > Will eigentlich jemand die Ham-Yard-Hotel-Uhr bauen? Keiner? Zur Not versuche ich einen Doppelachsigen Dreh-Drückgeber mit programmierbarer hapischer Rückmeldung daraus su bauen. Falls doch: Es wundert mich, dass die Begriffe "RS485" oder "CAN" in diesem Thread noch nicht aufgetaucht sind. Uhr wie im Ham Yard Hotel in London schrieb: > 135 Uhren RS485 geht mit 1/8 Unit-Load bis zu 256 Teilnehmern, das genügt für 135 Uhren. Daher (und weil am STM32F030F4P6 sonst die Pins knapp werden), habe ich * den UART für die externe Kommunikation und * den SPI für die DACs eingeplant. Details unter: https://github.com/TorstenC/Notizblog/wiki/VID28-PCB
Torsten C. schrieb: > Will eigentlich jemand die Ham-Yard-Hotel-Uhr bauen? Ich verfolge mit Interesse diesen Thread. Aber selber bauen kommt für mich nicht in Frage, weil für ein just-for-fun-project das Ganze mir zu zeitintensiv und zu teuer waere.
Habe es auch eben erst gesehen. Find ich ja hart cool! Fast schon etwas psychodelic - Yea Baby^^ Fehlt nur noch, dass jede Einzeluhr ne RGB LED bekommt und das ganze auch noch Farbspiele macht. Ich würde auch den preislichen und mechanischen Aufwand scheuen. Außerdem würde das Ding mit Mechanik in Hobbyqualität rattern wie bescheuert. Wie währe es denn mit einer graphischen Lösung? Also jede Einzeluhr als Objekt auf einem Display darstellen. Da würde so ein Pi mit LCD Shield sicher sinnvoll sein. Oder wenn man bereit ist mehr auszugeben und Aufwand zu treiben einen von diesen Taschenbeamern nehmen.
Ich persönlich finde den Reiz des Ganzen eben gerade daran, dass es mechanisch ist. Eine Display- oder Beamer-Lösung haette aus meiner Sicht nicht den Charme den es jetzt hat.
Chefkoch schrieb: > Ich würde auch den preislichen und mechanischen Aufwand scheuen. > Außerdem würde das Ding mit Mechanik in Hobbyqualität rattern wie > bescheuert. Die 'Mechanik' beschränkt sich auf das Gehäuse: * gemeinsames Riesen-Ziffernblatt mit Löchern und * eine Rückwand (Montage-Platte) zur Befestigung der VID28-PCBs. Die Zeiger-Mechanik ist fertig in den VID28-Modulen, da rattert nix, wenn man die Stepper nicht ratter-mäßig ansteuert. Das hört sich eher wie ein Summen an, auf Youtube sind einige Videos dazu, eines ist auch oben verlinkt. Mal sehen, wie leise ich die Ansteuerung mit den DACs hinbekomme. Mehmet Kendi schrieb: > Eine Display- oder Beamer-Lösung haette aus meiner Sicht > nicht den Charme den es jetzt hat. Genau, das ist wie bei der WordClock24h: Ein 21"-Monitor mit Android-TV-Stick ist zwar billiger, hat aber auch nicht den Charme. Es kann aber noch dauern: Ich warte seit über 5 Tagen auf die PT8211-Versandbestätigung. :-(
Torsten C. schrieb: > RS485 geht mit 1/8 Unit-Load bis zu 256 Teilnehmern, das genügt für 135 > Uhren. Hallo, hier wäre mein Vorschlag zur Ansteuerung: Das es eine Uhr mit Stunden und Minuten ist reichen 84 Werte im Normalbetrieb. 60 Minuten 1x pro Minute und 24 Stunden 1x pro Stunde. Das passt in ein Byte passt, incl. Flag . Für die Ansteuerung sind zwei Byte (Stunde, Minute) schon Komfortversion. Übertragen würde ich die Daten mit einer einzelnen Tx Leitung. Parallel an alle, also nur eine Leitung von Board zu Board. Das ganze ist dann selbst synchronisierend. Keine Adressen, Kollisionskontrolle unnötig, Protokolle auch etc.. Der Controller braucht natürlich eine Adresse. Aber nur um zu wissen welcher Teil der Uhr er ist. Da reicht dann eine Flash oder EEprom Zelle. Zum Einstellen (man ist ja sparsam) ein 8er Dil Schalter den man kurz auf ein paar Test Pads hält (alles was nicht 0x00 oder 0xFF ist setzt die Adresse). Da die Bewegungen selber ja mit konstanter Geschwindigkeit ablaufen kann man diese evtl. als Liste an die einzelnen Steuerungen übertragen und dort speichern. Dafür braucht es dann ein kleines Protokoll, ist aber nicht aufwändig.
Angehängte Dateien:
-

WatchClock.JPG
57 KB
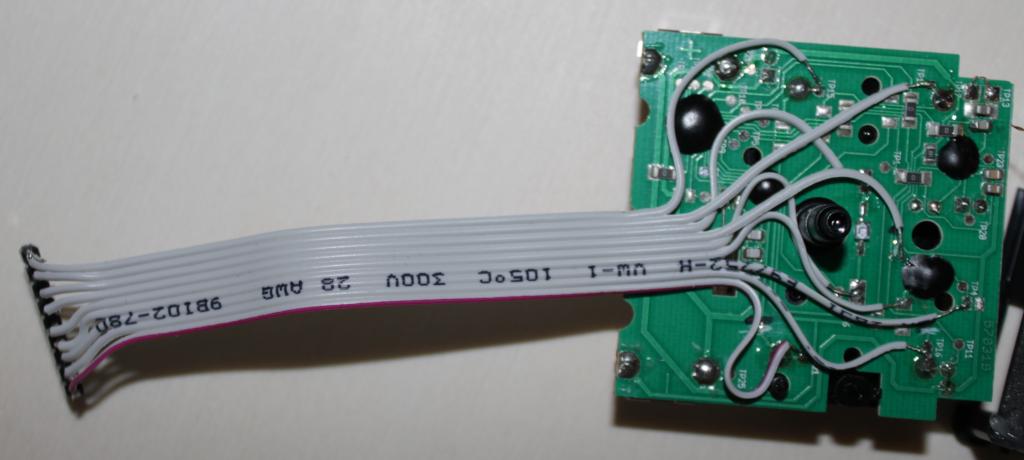
Hi, mal ein kleines Update von mir. Wie ich schon mal geschrieben habe gehe ich den Weg mit modifizierten Funk Uhrwerken. Und jetzt hatte ich mal etwas Zeit meinen Prototypen fertig zu stellen. Ein Video des ersten Tests gibt es hier: https://raw.githubusercontent.com/heinervdm/AVR/master/WatchClock/WatchClock.mp4 Das Uhrwerk "homed" sich erst mal, dafür nutze ich den eingebauten Mechanismus aus LED und Fototransistor. Ich bewege den Stundenzeiger so lange bis die LED 14 aufeinanderfolgende Schritte verdeckt war. Dann gehe ich nochmal 7 Schritte bis auf 0. Danach wiederhole ich diese Prozedur mit dem Sekundenzeiger wobei dieser nur 5 Schritte lang die LED verdeckt und gehe dann auch einige Schritte (5) bis zur Nullposition. Dann wartet auf seinem UART drauf dass die nächste Uhrzeit kommt und fährt dann auf die Position zu dieser Uhrzeit. Beim Uhrwerk habe ich die Leiterbahnen an den nötigen Stellen aufgetrennt und ein Flachbandkabel angelötet. Was jetzt noch fehlt ist das ganze auf 6 Uhrwerke zu erweitern und auf einen anderen µC zu konvertieren, der genügend IO's hast. Ich plane einen ATmega169P zu verwenden. Achso falls sich jemand fragt, dieser modifizierte Sekundenzeiger funktioniert Wunderbar, auch ohne Gegengewicht und auch in der Vertikalen. Meinen Quellcode habe ich hier hochgeladen: https://github.com/heinervdm/AVR/tree/master/WatchClock
Torsten C. schrieb: >> Will eigentlich jemand die Ham-Yard-Hotel-Uhr bauen? > > Keiner? Hi Torsten, ich würde das Ding brennend gerne nachbauen und auch Zeit investieren, leider hab ich allerdings absolut keinen Schimmer von der Technik dahinter. Ich war zwar mal Elektriker und könnte das alles auch zusammenlöten, aber verstehen werde ich es wohl kaum. Falls Ihr in diesem Forum also tatsächlich eine umsetzbare Lösung kommt, ich wäre EXTREMST interessiert! Ich hoffe der Thread geht weiter! Andreas
xsanders schrieb: > ich wäre EXTREMST interessiert "Klettern Gehen" hat ja schon ein PCB mit vid6606 gemacht^^. Alternativ mit einem STM32 [1] kostet so ein Uhr-Modul etwa das Gleiche. Man könnte nur mehr Intelligenz in das Modul packen und hätte weniger "Bus-Last", was bei 135 Uhren ja ein Argument wäre. Willst Du wirklich eine Matrix aus über 100 Uhren bauen? [1] https://github.com/TorstenC/Notizblog/wiki/VID28-PCB
Torsten C. schrieb: > Willst Du wirklich eine Matrix aus über 100 Uhren bauen? Hi Torsten, nein ich würde mich auf die kleinen mit 25/60 beschränken. Du möchtest selbst keine bauen ?
Hi Leute, ich hoffe inständig dass es hier weitergeht!! Viele Grüße, Andi
Was meinst Du mit eimen "kleinen mit 25/60"? xsanders schrieb: > Du möchtest selbst keine bauen ? Bedarf habe ich gerade nicht. Was mich daran interessiert: Wie baut man sowas ab besten/effiziesten? Z.B. mit VID6606 oder STM32? ^^ Ich tendiere zum STM32 mit RS485 und/oder SPI oder I²C, da wäre man noch flexibel. Ein Proof-of-concept will ich schon noch fertig stellen.
die gibts ja in mehreren varianten http://www.humanssince1982.com/amt6096 24, 60, 84 .... ich habe von der ganzen Elektronik her wie gesagt keine Ahnung, aber ich würd das Teil bauen wollen wenn es dazu ein "proof of concept" gibt was man alles braucht und wie verschalten muss...
Schaut mal hier: http://www.dize.de/bcd.htm Da wurde die Uhr bereits fertig nachgebaut. Gruß Cornelius
Torsten C. schrieb: > Was meinst Du mit eimen "kleinen mit 25/60"? > > xsanders schrieb: >> Du möchtest selbst keine bauen ? > > Bedarf habe ich gerade nicht. Was mich daran interessiert: > Wie baut man sowas ab besten/effiziesten? > Z.B. mit VID6606 oder STM32? ^^ > > Ich tendiere zum STM32 mit RS485 und/oder SPI oder I²C, da wäre man noch > flexibel. > > Ein Proof-of-concept will ich schon noch fertig stellen. Hallo ich klinke mich hier mal ein. Torsten C. ist ja schon sehr weit. Ich würde auf die Platine jeweils einen kleinen/günstigen uC machen. Dazu ein paar dipschalter um eine adresse einzustellen. Und das ganze dann per SPI ansteuern. Soll heißen es gibt z.B. nen zentralen RPI. Alle Clients (einer pro Uhr) sind über einen BUS an SPI in Reihe geschaltet. Sendet der RPI nun eine Zeigeränderung über den SPI los wertet der erste diese Information aus und checkt ob die Adresse seiner entspricht. Ist dies nicht der Fall, so wird das packet vom 1. uC auf dem Bus an den nächsten weitergeleitet, bis das Paket am entsprechenden uC empfangen und umgesetzt wurde. Dadurch benötigt man RPI nur einen Port als Datenleitung und der Adressraum wird mit Anzahl der Dipschalter festgelegt.
Ich wollte auch nochmal nachhaken ob jemand mitlerweile am Bauen ist ?
Bin mittlerweile bisschen weiter. VID28 hab ich bestellt (stop entfernt) und mit nem arduino ohne Probleme zum laufen gebracht. Nächster Schritt wird das homing. Hierzu habe ich die Neodym Magneten aus dem post weiter oben bestellt.
Hi Simon, klingt sehr gut! Ich wäre super happy wenn das zu nem "Nachbau" Projekt werden könnte. Zum selber entwickeln bin ich leider zu unwissend.
ich befürchte fast, dass dieses thema langsam stirbt. ist wahrscheinlich doch zu viel aufwand / zu hohe kosten. schade drum! oder ist noch jemand fleißig am entwickeln? habe einen shop gefunden der diese art uhren verkauft....die große für ca 89000€ das sollte doch günstiger gehen?! :D
Ersatzlösung: Grosses Display nehmen und das ganze rein grafisch erzeugen.
Ich bin noch dran aber Zeit technisch gerade schlecht aufgestellt. Das ansteuern der einzelnen Motoren läuft bei mir ohne Probleme. Jetzt benötige ich ein Konzept alle Motoren intelligent/kostengünstig zu vernetzen.
Ich hatte weiter oben meinen Ansatz geposted mit den Umgebauten Funkuhren. Mein Plan war es alle RX der Motoren mit einem TX einer Steuerplatine zu verbinden. Die Steuerplatine sendet dann einmal in der Minute die neue Uhrzeit und jeder Motor weiß an welcher stelle er sich befindet und guckt dann in der Lookuptable seine neue Soll-Position nach. Mit dieser Methode kann man dann natürlich nur die Uhrzeit anzeigen und keinen der anderen Effekte, aber dafür war mein Ansatz auch nie ausgelegt, da meine Motoren nur in eine Richtung drehen. Aber die Motoren einfach über UART anzusprechen sollte auch in deinem Fall gehen, du brauchst ja keine Antwort von den Motoren. Dann bekommt jeder Motor eine ID und wenn der Motor eine Nachricht an seine ID empfängt dann verarbeitet er die Nachricht. Dann muss man sich evtl noch etwas zum Synchronisieren überlegen, aber dafür könnte man ja ein Start Kommando einbauen, das alle Motoren den letzten Befehl ausführen lässt den sie empfangen haben.
Übergangsweise: Clock App: A million Times for iPhone and iPad https://itunes.apple.com/us/app/id939609390?mt=8
Ich bin aktuell dabei den Nachbau zu wagen. Geplant ist ein Array von 15x8 Uhren mit einer Gesamtgröße von 2,40m x 1,35m zu bauen. Nachdem ich verschiedene Motoren getestet habe (Sonceboz 6407, VID29-05) bin ich am Ende beim X27.168 hängen geblieben. Der Sonceboz ist zwar wirklich klasse bzgl. Laufruhe, aber leider sehr teuer. Das beste Angebot, was ich hatte waren 27€ plus MwSt. pro Stück. Der VID29-05 ist zwar billig (unter $4), aber die zweite Achse wird über insgesamt 7 Zahnräder angetrieben. Der Motor ist damit unglaublich laut und die Vibrationen übertragen sich sogar aufs Gehäuse. Momentan bin ich beim X27.168 hängen geblieben. Dieser hat zwar nur eine Achse, ist dafür aber angenehm ruhig und kostet gerade mal $1,50. Die Verbindung zweier Motoren erfolgt über zwei externe Zahnräder, die ich lasern werde. Erste Versuche mit 2cm Durchmesser bei 70 Zähnen waren sehr vielversprechend. Die beiden Motoren sitzen am Ende auf einer Platine und schauen sich gegenseitig an. Im oberen Teil sind sie durch eine gefräste Platte verbunden, die auch die zweite Achse über ein Kugellager führt. Die Platine selbst kriegt dann neben den beiden Motoren noch zwei Motortreiber (A4988), einen STM32 und einen CAN-Bus Breakout-Board. Die Platinen werden dann von einem weiteren STM über den CAN-Bus gesteuert. Möglicherweise kommt am Ende noch ein ESP dran, um das Ganze im heimischen WLAN zu haben. Momentan warte ich auf die ersten Testplatinen, die hoffentlich bald eintreffen. Wenn der erste Test mit insgesamt 4 Motoren erfolgreich war geht's an das finale Platinenlayout und die Übertragung auf die insgesamt 120 Uhren. Mal sehen, ob ich noch dieses Jahr damit fertig werde. Gruß Cornelius
Warum nimmst du nicht den VID29-05 mit Doppelwelle ? http://www.vid.wellgain.com/product.aspx?sortid=26 http://www.vid.wellgain.com/UploadFile/pdf/product/20090905105654VID28-05%20V2070829.pdf
Korrektur: VID28-05 ist der mit Doppelwelle. Links vorstehend stimmen jedoch.
Cornelius F. schrieb: > Die Platine selbst kriegt dann neben den beiden Motoren noch [...] > einen STM32 und einen CAN-Bus Breakout-Board. Warum müssen die Einzelmodule so verschwenderisch komplexe und entsprechend teure, geradezu dekadent anmutende Luxuscontroller enthalten, gerade hier wäre doch jeder Cent spürbar? Und warum dann dennoch völlig überraschend beim Antrieb plötzlich wieder um läppische 1 Dollar geizen und lieber Zahnräder selber herstellen? Warum nicht einfach den billigsten sub-30-Cent-Controller der sich finden lässt, eine SPI-Daisychain für alle Module und mit dem gesparten Geld den Motor den der Vorposter vorgeschlagen hat verwenden?
Bernd K. schrieb: > Warum müssen die Einzelmodule so verschwenderisch komplexe und > entsprechend teure, geradezu dekadent anmutende Luxuscontroller > enthalten, Also ein LPC11C24 mit integrierter(!) CAN Phy kostet so um 1,80€ bei 100 Stück, bei der räumlichen Ausdehnung ein sehr sehr vernünftiger Ansatz. SPI würde ich persönlich(!) als Vernetzung von >100 Controlern auf >3 qm nicht als guten Ansatz empfinden. Ob es bei ST auch welche mit integrierter Phy gibt weiß ich nicht (die Phy alleine kostet 80 Cent). Die LPC lassen sich auch über CAN updaten, sehr angenehm bei dieser Anzahl. Bei den Gesamtkosten des Projektes spielen die letzten 50€ für leichte Handhabbarkeit durch CAN echt keine Rolle mehr. Und das mit den Zahnrädern hat er doch geschrieben, es geht in erster Linie um die Lautstärke, so lese ich das.
Angehängte Dateien:
-

IMG_4846.JPG
61 KB

Die STM kosten als Breakout auch nur 1,80€. Ok mit den CAN Boards wird's dann noch mal minimal teurer. Der VID29-05 Motor ist viel zu laut und vibriert wie verrückt und das schon bei einem Stück. Den Krach von 120 Exemplaren möchte ich mir gar nicht ausmalen. Ich habe hier noch einen netten Mitschnitt eines Vortrages des Entwicklers des Originals. Es gab wohl inzwischen 6 Versionen der Uhr. Die aktuellste läuft mit den X40 Schrittmotoren, die zu Modulen zusammen gefasst sind. Für mich ist bei dem Projekt ganz klar der Weg das Spannende dabei. Ich habe momentan nicht mal wirklich Platz dafür, aber das wird sich schon ergeben. Ich finde es schön auch mal den ganzen Maschinenpark (Laser, CNC, Bestückungsautomat) an einem Projekt zu entfesseln. Die Referenzierung der Bewegung erfolgt übrigens magnetisch. Erste Versuche am Sonceboz Motor waren vielversprechend. Hier ein Video davon: https://www.youtube.com/watch?v=Q5m8UTu8xPA Es sind kleine (1x2mm) Magnete direkt auf die Zahnräder geklebt und mittels Hall Sensoren von außen und innen abgefragt.
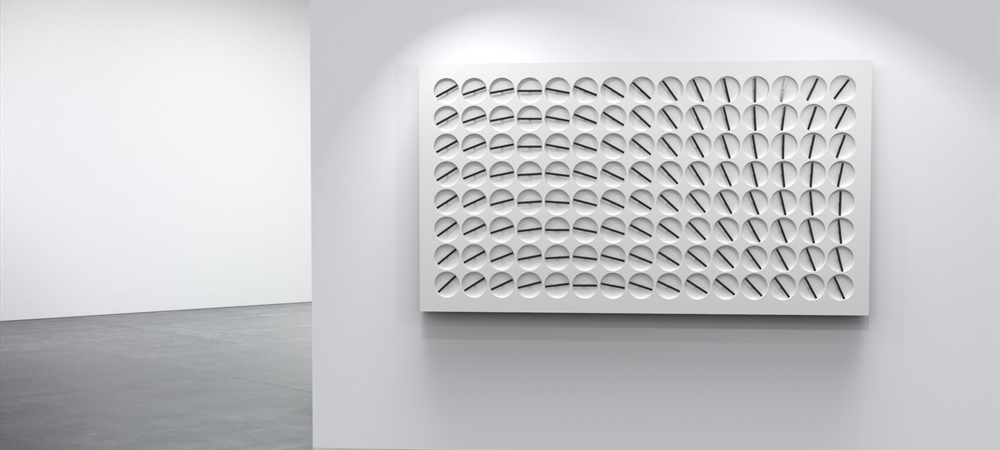
Willst Du die Bausteine als Module integrieren oder eine Gesamtplatine mit den ICs entwerfen? Die Spannungsversorgung würde mich auch interessieren, da kommen ja doch ziemliche Spitzenströme auf. Hast Du das Angebot hier gesehen: https://www.aliexpress.com/item/100pcs-lot-Free-shipping-Reprap-Stepper-Driver-A4988-stepper-motor-driver-Heat-sinks-3D-Printer/2027438696.html
Ich habe aktuell geplant eine Platine mit den einzelnen Modulen zu bestücken. Auch wenn ich seit kurzem stolzer Besitzer eines Bestückungsautomaten bin will ich so die möglichen Fehlerquellen gering halten. Aktuell ist für die Stromversorgung eine externe Spannungsquelle mit 9V vorgesehen (wie viel Strom wir hier brauchen wird sich noch zeigen). Jede Platine bekommt einen 5V und einen 3,3V Regler mit 1A Maximalstrom. Zum Entstören sind ein paar größere Elkos eingeplant. Danke für das Angebot. Sieht interessant aus - wenn ich dann irgendwann soweit bin ;-)
Cornelius F. schrieb: > Die Variante soll es werden. jetzt müsste man nur noch mit einem Magneten das Bild "löschen" oder überhaupt beeinflussen können. Nur so für den Spieltrieb ;) Das sieht ja so schon aus wie Feldlinien.
Beim Original muss es wohl für die ganz großen Installationen ein Frontend für's Tablet geben, mit dem man Formen direkt zeichnen kann. Auch einen Schriftsatz gibt es zur Darstellung von Texten.
ist eigentlich der Hersteller des Originals bekannt?
Man könnte also auch mit einem Viertel der Baukosten auskommen für diese "Sparversion" http://www.humanssince1982.com/the-clock-clock-white
Angehängte Dateien:
-

IMG_5039.jpg
82 KB
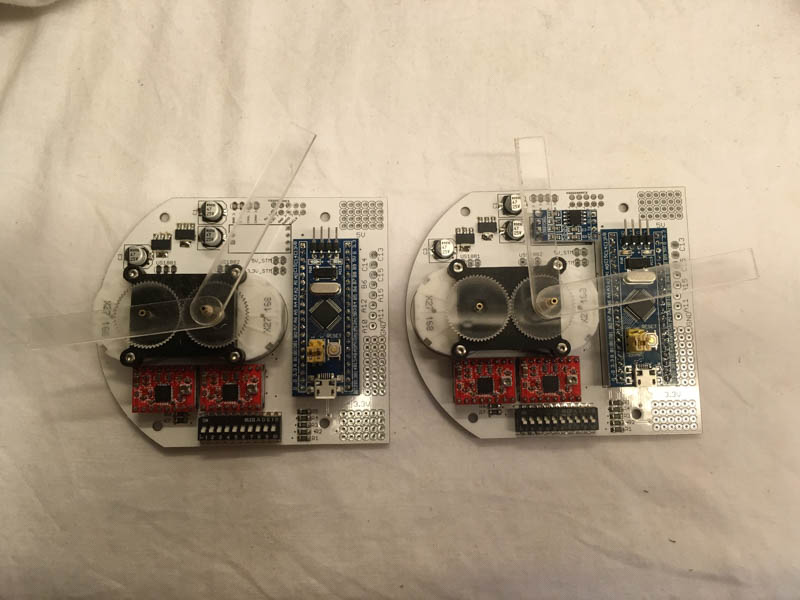
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Die Testplatinen sind eingetroffen und fertig bestückt. Ein CAM Treiber fehlt aktuell noch. Die Mechanik an sich funktioniert. Jetzt gehts an die Firmware...