Tim . schrieb: > Und es funktioniert!! Hört sich doch wunderbar an :) Jetz kann ich es gar nicht mehr erwarten bis das Teil kommt.
Und was braucht man nun alles für Hardware um da einsteigen zu können?
Oliver Stellebaum schrieb: > Und was braucht man nun alles für Hardware um da einsteigen zu können? So wie es jetzt aussieht, kommt ein STM32 Discovery Board wohl am günstigsten. Über dessen SWD kann dann der Nuvoton MCU am Quadcopter geflasht werden.
Sind das diese kleinen Dinger die man letztes Jahr oder so für wenig Geld kaufen konnte?
Oliver Stellebaum schrieb: > Sind das diese kleinen Dinger die man letztes Jahr oder so für wenig > Geld kaufen konnte? Ja z.B. das STM32F$DISCOVERY, hat dann auch gleich selbst einen leistungsstarken MCU, falls man mit dem Discovery selber auch experimentieren will. http://www.st.com/web/catalog/tools/FM116/SC959/SS1532/PF252419 Ich glaube Tim hat das STM32F0DISCOVERY verwendet. Dies hat einen MCU eher für weniger intensive CPU Anforderungen. http://www.st.com/web/catalog/tools/FM116/SC959/SS1532/PF253215
Tim . schrieb: > Ich will erst > einmal die Firmware retten. Nur so eine Idee ich bin mir nicht sicher ob das klappt. Aber kann man nicht über SWD ein Programm in den Ram laden das dann den Flash ausliest? Der Cortex kann doch Code aus dem RAM ausführen?!
Torsten C. schrieb: > Entweder Ich hab's nicht verstanden, oder Du hast die Frage schon selbst > beantwortet: > > Tim . schrieb: >> For DataFlash, however, it is not easy to be protected >> because it can be dumped by executing a program residing in APROM Das Dataflash ist ein Teil des APROM. Das APROM will ich auslesen, daher kann ich es nicht beschreiben. Christopher B. schrieb: > Tim . schrieb: >> Ich will erst >> einmal die Firmware retten. > Nur so eine Idee ich bin mir nicht sicher ob das klappt. > Aber kann man nicht über SWD ein Programm in den Ram laden das dann den > Flash ausliest? Der Cortex kann doch Code aus dem RAM ausführen?! Genau daran habe ich gedacht. Es scheint aber nicht ganz so simpel zu sein. Denn wie führt man den Code dann aus? Manuel Steiner schrieb: > Ich glaube Tim hat das STM32F0DISCOVERY verwendet. Dies hat einen MCU > eher für weniger intensive CPU Anforderungen. Stimmt genau. Eigentlich sollte aber jedes STM32-Discovery-Board funktionieren, da der ST-Link Teil identisch zu sein scheint.
Tim . schrieb: > Stimmt genau. Eigentlich sollte aber jedes STM32-Discovery-Board > funktionieren, da der ST-Link Teil identisch zu sein scheint. Ja, von dem gehe ich auch aus.
Mist, das Ding was ich habe ist nur STM8. Muss ich wohl noch mal was kaufen. Naja, so teuer sind die Dinger ja nicht. Was braucht man denn noch so? Diese kleinen Stecklingskabel müssen wohl auch noch angeschafft werden.
Oliver Stellebaum schrieb: > Mist, das Ding was ich habe ist nur STM8. Es gibt viele Board mit SWD-Debugger. Die Infineon XMC Boards könnten auch funktionieren, ebenso wie LPCXpresso
Das STM8 müsste ausreichen. Laut ST ist da wohl auch ein ST-Link drauf. Fraglich sit nur ob man einen ST-Link V2 brauch oder ob der ST-Link reicht. Falls es der V2 sein muss dann reich auch kein STM32VL Board.
Tim . schrieb: > Oliver Stellebaum schrieb: >> Mist, das Ding was ich habe ist nur STM8. > > Es gibt viele Board mit SWD-Debugger. Die Infineon XMC Boards könnten > auch funktionieren, ebenso wie LPCXpresso Ich glaube allerdings, dass das SWD an den STM8 Discovery Boards ein abgespecktes SWD ist, bzw. die Firmaware im dazugehörigen Chip abgespeckt ist und sich damit nur STM8 Teile programmieren lassen. Und zu den Kabeln. Ich glaube an den Discoveries ist das ein ganz normales 2,54mm Raster. Also sollte sich da schnell ein Header finden lassen.
Oliver Stellebaum schrieb: > Diese kleinen Stecklingskabel müssen wohl auch noch angeschafft werden. Manuel Steiner schrieb: > Ich glaube an den Discoveries ist das ein ganz > normales 2,54mm Raster. Genau, siehe Foto ^^. Stichworte: "dupont jumper" oder "dupont wire" bei ebay oder aliexpress. Gehört eh in jede Bastelecke. ;-)
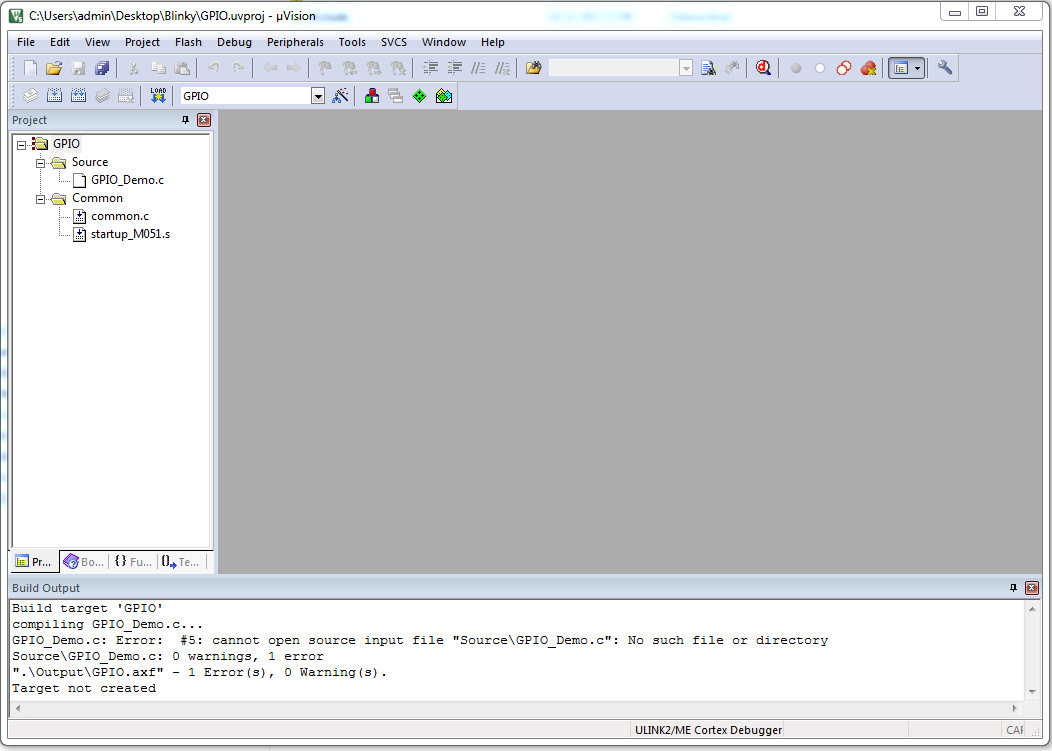
Ein Problem: Da sowieso ein Ersatzcopter auf dem Weg ist, habe ich gedacht dass ich ja auch das Flash löschen könnte. Leider ist das nicht so einfach: Keil gibt ein "Cannot Load Flash Programming Algorithm" aus. Evtl. ist für die Programmierung des Flash das Discovery Board doch nicht geeignet? Eine Möglichkeit ist noch Versaloon (neue Firmware für das Discovery Board), aber vielleicht geht es auch noch anders...
Bei Keil lassen sich die Algorithmen im Target Driver Setup einstellen. Ich habe nur überhaupt keine Ahnung ob da für Nuvoton etwas dabei ist oder nicht.
Hey, macht keinen Mist :-) Hab mir jetzt so ein Discoveryboard bestellt und die kleinen Kabel. Will doch wenigstens mal die 4 Motoren nach meiner Pfeife tanzen lassen. Na mal im Ernst, ein simples "stillstehen" über einen Magnetfeldsensor oder sowas wäre schon cool. Also so ein "Luftnagel".
Tim . schrieb: > Da sowieso ein Ersatzcopter auf dem Weg ist, habe ich gedacht dass ich Ich hab tonsee_mall geschrieben und der schickt mir einen neuen, btw. Wo kommt dein Ersatz her?
Tim . schrieb: > Keil gibt ein "Cannot Load Flash Programming Algorithm" aus. Vielleicht ist das LOCK-Bit im Config0-Register gesetzt (Seite 128 vom Datenblatt): Security Lock 0 = Flash data locked. 1 = Flash data unlocked. When flash data is locked, only device ID, unique ID, Config0 and Config1 can be read by writer and ICP through serial debug interface. Other data is locked as 0xFFFFFFFF. ISP can read data anywhere regardless of the LOCK bit value. "writer and ICP" soll wohl das SWD-Interface oder Parallel-/Gang-Programmer sein. Aber da du ja zumindest vom RAM lesen kannst... Kannst ja mal versuchen Config0 zu lesen (Adresse 0x00300000). Vielleicht kannst es ja auch umschreiben falls das Bit gesetzt ist :-) ISP ist der Bootloader. Könnte mir vorstellen, dass ein selbst gestrickter drauf ist welcher über die UART läuft (aber wird schwer raus zu finden wie der läuft).
Ich hab da noch etwas gefunden ... http://www.nuvoton-m0.com/forum.php?mod=viewthread&tid=1311&extra=page%3D3 The full erase procedure is part of ICP waveform, which shares the same pins of SWD(serial wire debug), but is not SWD. Der Thread Owner hat dann aber irgendwie geschrieben: EDIT: I found a way to use the ICP tool as a workaround. Er schreibt aber nicht, welches Hardwaretool er dafür einsetzt und wie er das Ganze dann gemacht hat. Edit: Vielleicht funktioniert das mit dem ICP Tool und mit dem normalen SWD, man kanns ja mal probieren...
Manuel Steiner schrieb: > Ich hab da noch etwas gefunden ... Ich verstehe das so, dass es über ICP/SWD geht aber irgendwas spezielles über SWD gemacht wird. Das würde bedeuten, dass man die Nuvoton hardware zum Löschen bräuchte denke ich.
Marius S. schrieb: > Manuel Steiner schrieb: >> Ich hab da noch etwas gefunden ... > > Ich verstehe das so, dass es über ICP/SWD geht aber irgendwas spezielles > über SWD gemacht wird. Das würde bedeuten, dass man die Nuvoton hardware > zum Löschen bräuchte denke ich. Wenn wir Glück haben, ist die Hardware nicht relevant und das Ganze geschieht in der ICP Software. Ich kanns mir aber leider auch irgendwie nicht so vorstellen, dass es mit normaler SWD Hardware funktioniert. Edit: Ich vermute auch mal, dass die ICP Software schon mal die Discovery Hardware erkennen wird, wenn man sich das mal überlegt. Ich glaube auch, dass Marius da recht hat.
Manuel Steiner schrieb: > Ich hab da noch etwas gefunden ... > > http://www.nuvoton-m0.com/forum.php?mod=viewthread&tid=1311&extra=page%3D3 Hi Manuel, das ist ein Super-Fund! Jetzt verstehe ich auch, wo das Problem ist: Die Programmierung des Flash läuft normalerweise (z.B. unter µVision) so, dass per SWD ein kleines Programm ins SRAM geladen wird, welches anschließend das Schreiben des Flash übernimmt. Die Quellcodes sind sogar in µVision vorhanden und werden mit der Software mitinstalliert (Habe ich mal angehängt). Im gesperrten Zustand ist es aber nicht möglich das SRAM zu beschreiben, so dass das Löschen anders geschehen muss. Inzwischen habe ich herausgefunden, dass sich die Flash Control Register (ab 0x5000c000, 5.7.5 im Manual) zumindest teilweise per SWD beschreiben lassen. Diese Register werden normalerweise von der Software zur Programmierung des Flash verwendet. Gut möglich, dass "erase" im ICP Modus über einen direkten Registerzugriff erfolgt. Jetzt gibt es ein paar Möglichkeiten um weiter zu machen: - Nuvton anbetteln die Spezifikation herauszugeben (wahrscheinlich aussichtslos) - Alternative Software suchen, die Erase im ICP-Modus für die MINI51-Serie anbietet. OpenOCD, CooCox? - Vielleicht hat inzwischen jemand das Protokoll analysiert? Und im Netz etwas veröffentlicht? - Nu-Link kaufen und das Protokoll selbst analysieren.
Also ich glaube ich werde da mal in die Tasche greifen und ein Nulink besorgen. Kostet ja nicht die Welt. Wenn danach ein funktionierendes System zur Verfügung steht, hat sich das meiner Meinung nach schon gelohnt. Weil ob z.B. Versaloon auf den Discoveries mit den Nuvoton Teilen funktioniert usw. ist ja auch nicht wirklich sicher. Und ich glaube eben auch wirklich, dass man für das Löschen da mal mit dem ICP Tool arbeiten muss. Und wenn das am PC kein Nulink findet wird das wohl seinen Dienst verweigern.
http://dx.com/p/hubsan-h107-a18-value-pack-for-hubsan-x4-h107l-r-c-quadcopter-256313 zufällig gefunden...
Manuel Steiner schrieb: > Also ich glaube ich werde da mal in die Tasche greifen und ein Nulink > besorgen. Wo gibt's den? falls das zu zweit/dritt oder so billiger wird, würde ich mich anschließen. Ich kann mir auch vorstellen, für andere Projekte einen der unterstützten Nuvoton µC einzusetzen, falls man mal billig an geringe Stückzahlen kommt: http://www.coocox.org/NuLink.htm Bei Aliexpress habe ich noch keine gefunden, aber das ist ein anderes Thema. Wo bestellst Du den Nulink?
Würde es einen Unterschied machen wenn ich es mit meinem J-Link versuche? Der kann soweit ich weiß die Nuvoto von Haus aus. Muss ich mal schaun ob ich morgen Zeit dazu habe..
Tim schrieb: > Jetzt gibt es ein paar Möglichkeiten um weiter zu machen Ich habe noch eine: Für 2€ bei dikigey einen neuen MINI54ZAN bestellen, und den alten incl. Original-Firmware auslöten. Timmo H. schrieb: > Gibts bei Digikey Ah, danke. Also könnte es sich lohnen, nicht allein zu bestellen, falls man nicht eh über 65€ kommt. Es gibt - "NU-LINK-PRO" (46,54€), - "NU-LINK" (33,94€) und - "ULINK-ME" (49,38€ bei Mouser) Auf der CooCox-Seite ^^ ist auch noch ein "NuLinkMe"(?!) erwähnt. Hat einer von Euch den Überblick, was man am besten bestellt, damit man auch über das Quadcopter-Projekt hinaus danach noch einen Nutzen hat? µCs von Nuvoton mit ARM Cortex-M0 gibt's ja schon ab 1,60€.
No y. schrieb: > Würde es einen Unterschied machen wenn ich es mit meinem J-Link > versuche? > Der kann soweit ich weiß die Nuvoto von Haus aus. > > Muss ich mal schaun ob ich morgen Zeit dazu habe.. Das wäre toll, wenn du das versuchen könntest. Jede Erfahrung bringt einen weiter. Ich habe nur wirklich so das Gefühl, dass man wie Tim auch schon geschrieben hat, wegen dem Lockbit nichts in den RAM schreiben darf, und deswegen die von Keil verwendete erase Routine nicht verwenden kann. Dafür muss man dann wohl das ICP Tool verwenden welches wahrscheinlich auch nur mit Nulink bzw Nuvoton SDKs mit integriertem Nulink funktioniert. Torsten C. schrieb: > Tim schrieb: >> Jetzt gibt es ein paar Möglichkeiten um weiter zu machen > > Ich habe noch eine: Für 2€ bei dikigey einen neuen MINI54ZAN bestellen, > und den alten incl. Original-Firmware auslöten. Geht natürlich auch, nur wird sich das wahrscheinlich nicht jeder zutrauen bzw. machen wollen. Es hatten ja auch schon Leute wegen Einsteiger-, Lernplattform ein Auge auf den Quadcopter, soweit ich das mitbekommen habe. > Hat einer von Euch den Überblick, was man am besten bestellt, damit man > auch über das Quadcopter-Projekt hinaus danach noch einen Nutzen hat? nosilent und ich werden vermutlichen den Pro bestellen. Ich habe zwar keine Ahnung ob man das ganze wide voltage settings Zeug braucht, aber die paar Euro sollen dann auch nicht das Problem sein. Von den Nulink ME hab ich nur gelesen, dass die alle auf den Nutiny SDK Kits oben sind, wovon es zumindest ein paar gibt, die nämlich ICP nicht unterstützen. Also ist hier Vorsicht geboten. Dass es das Teil auch standalone gibt, hatte ich nicht gewusst. Wenn der Nulink dann mal da ist, bzw. der Quadcopter auch, würd ich dann natürlich auch mal Logic Analyzer usw anhängen, um evtl. den erase Prozess zu analysieren. Vielleicht lässt sich ja eine Software machen, die über das Discovery SWD oder andere SWD dann auch löschen kann. Falls das in irgend einer Form möglich ist. Da der Quadcopter allerdings noch nicht da ist kann das noch eine Weile dauern. Falls sich noch er dazu entschließt, einen Nulink zu besorgen, und auch den Quadcopter bereits zu Hause hat, kann da natürlich auch schon mal analysieren :) Bezüglich Sammelbestellung weiß ich nicht so genau. Ich werde nämlich mit nosilent bestellen und ich schätze wird kommen über den Mindestbestellwert. Da das ganze über ihn geht, kann ich dazu leider nichts sagen.
Da hat sich ja einiges getan! Ein paar Sachen sind mir noch eingefallen: - Das Nu-Link ist Teil der Nuvoton Evaluation kits (Wie beim Discovery). Die sind teilweise billiger als ein einzelnes Nu-Link im Gehäuse. Distributor in Deutschland ist Atlantik Elektronik: https://webshop.atlantikelektronik.de/index.php/cat/c794_Evaluation-Kits.html Habe mich mal registiert, mal sehen ob man dort bestellen kann. Das neue Kit zum MINI51F interessiert mich sowieso. - Der aktuelle Master branch von OpenOCD unterstützt die mini51 serie. Vielleicht klappt es damit ja besser. Sieht nur aus, als wenn man sich das selbst compilieren muss. http://openocd.sourceforge.net/doc/doxygen/html/mini51_8c_source.html
Danke für die Infos, Manuel. :-) Manuel Steiner schrieb: > … würd ich dann natürlich auch mal Logic Analyzer usw anhängen … > Vielleicht lässt sich ja eine Software machen, > die über das Discovery … auch löschen kann. Den Gedanken hatte ich auch schon. Man kann ja auch den Target-µC vom Disco entsprechend programmieren. Das ist ja vermutlich kein komplizierter Vorgang. Toll dass Du das anbietest. Dann warte ich mit dem Nulink erstmal, bis Du (oder evt. jemand anders vor Dir) ein Ergebnis hat. Für_mich hat sich damit auch erstmal die Frage nach der Sammelbestellung erledigt.
Tim schrieb: > - Das Nu-Link ist Teil der Nuvoton Evaluation kits (Wie beim Discovery). Richtig, nur bitte passt auf, welches ihr bestellt, wenn ihr eines bestellt. Denn mindestens von 2 hab ich schon in irgend einer Präsentation von Nuvoton gelesen, dass die NICHT ICP unterstützen obwohl da ein Nulink ME drauf ist. Edit: http://www.ie.ksu.edu.tw/data/nuvoton/Training%20Material/NuMicro%20NUC100%20Series/13_NuMicro%20Nuvoton%20Tools.pdf Folie 22: Nutiny SDK 100, Nutiny SDK 120: No ICP
Tim schrieb: > Atlantik Elektronik Die kosten alle 25,45€ bei Digikey. Ob die bei Antlantik nennenswert billiger sind? Wenn NUTINY-SDK-NUC120 und NUTINY-SDK-NUC100 nicht in Frage kommen, bleiben für den gleichen Preis: - NUTINY-SDK-NUC123 - NUTINY-SDK-NUC140 - NUTINY-SDK-NUC122 - NUTINY-SDK-MINI51 - NUTINY-SDK-NUC200 - NUTINY-SDK-NUC220 - NUTINY-SDK-NANO100 und - NUTINY-SDK-M051
Torsten C. schrieb: > - NUTINY-SDK-M051 hat glaub ich laut Atlantik Homepage auch keine ICP Funktion
Hm... stimmt. Eigentlich merkwürdig, da das Nu-link selbst im wesentlichen auch nur aus einer MCU besteht. Die Schaltung gibt es ja auf der CooCox Website. Es kann sich also nur um eine andere Firmware handeln.
Manuel Steiner schrieb: > hat glaub ich ... auch keine ICP Funktion Ich schätze, das gilt für alle in der Preisklasse. Seite 10 ^^ interpretiere ich so, dass debuggen nur mit ISP und programmieren des LDROMs nur mit ICP geht. Braucht man also zwei unterschiedliche "Adapter", wenn man beides will?
Torsten C. schrieb: > Seite 10 ^^ interpretiere ich so, dass debuggen nur mit ISP und > programmieren des LDROMs nur mit ICP geht. Braucht man also zwei > unterschiedliche "Adapter", wenn man beides will? ISP is glaub ich Bootloader über seriell. Da braucht man gar keine extra Hardware. Mit ICP kann man glaub ich und hoff ich doch alles machen :)
Manuel Steiner schrieb: > Mit ICP kann man glaub ich und hoff ich doch alles machen :) Nein, CPU Run Code = "No" auf Seite 10 ^^ Aber wohl trotzdem mit dem Nu-Link, über die USB <-> SWD bridge Sorry, erst eben genau gelesen.
Da man mit ICP alle Bereiche schreiben kann und der eigentliche Applikationscode im APROM liegt, geh ich davon aus, dass das funktioniert :)
Meiner ist grade angekommen: http://www.ebay.de/itm/171129650792?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649 Scheint zwar die gleichen Komponenten verbaut zu haben. Leider ist das Layout geändert, ist nur noch einseitig, und es ist vom Nuvoton Mini54ZAN nix rausgeführt. Daher ist dieses Modell nicht gut zum Hacken geignet... Ich werde testen ob es auch das V2X2 Protokoll spricht. EDIT: mal genauer schaun... Auch hier ist offensichtlich der SWD Port rausgeführt. Auf der Unterseite als Testpads... Könnte sich von daher auch eignen.
Kille H. schrieb: > Leider ist das Layout geändert, ist nur noch einseitig Der sieht für mein Empfinden eh komplett anders aus. Ich würde nicht sagen "geändert" sondern "anders implementiert". Das kommt davon, wenn man aus "Frankfurt, Deutschland" bestellt. ;-) Spaß beiseite: Klingt interessant, kannst Du davon auch mal so gute Fotos posten?
Kille H. schrieb: > Meiner ist grade angekommen: Habe auch in "Frankfurt" bestellt. Wie lange hast du gewartet?
Wie kann man denn die "RB...CN" Nummer tracken die man vom Versandhändler aus China EBay bekommt? Hat das bei euch geklappt?
Manchmal kann bei die bei dhl.com tracken, aber nur bis es beim deutschen Zoll ankommt.
Ja geht mit DHL. Hängt immer etwas davon ab wie weit. Manchmal nur bis "Die Sendung wird ins Zielland transportiert..." manchmal noch bis "Die Sendung ist im Zielland eingetroffen. (IPZ-Ffm, Deutschland)". Danach ist aber immer Schluss. Oftmals dauert es aber schon 5-10 Tage bis du die Nummer überhaupt tracken kannst. Hier geht oftmals mehr: http://track-chinapost.com/startairmail.php
Hallo, ihr sucht doch einen ISP-Adapter, das hier könnte was sein: http://www.aliexpress.com/item/Free-Shipping-NuLink-BuLink-Compatible-Cortex-M0-M051-ISP-ICP-Program/674565728.html Gruß Stefan
wow, wie viele sind denn hier Frankfurter? da lohnt sich ja evtl. eine "Frankfurter"-sammelbestellung :)
Naja bei 0€ Versandkosten lohnt das eher nicht, weil du dann schnell über die Freigrenze hinaus kommst.
Stefan V. schrieb: > ihr sucht doch einen ISP-Adapter, das hier könnte was sein: > > http://www.aliexpress.com/item/Free-Shipping-NuLink-BuLink-Compatible-Cortex-M0-M051-ISP-ICP-Program/674565728.html > > Gruß > Stefan Sehr interessant, danke! Mich macht nur stutzig dass die Software von 2011 sein soll und der MINI51 nirgendwo erwähnt wird. Ich habe mal beim Verkäufer angefragt.
Nuvoton veranstaltet mir den Programmieradapter ja wirklich ein ziemliches Verwirrspiel. Ich werde erst einmal ein Discovery-Board mit Versaloon flashed und sehen, ob ich damit weiter komme.
Angehängte Dateien:
-

IMG_20131024_123537.jpg
540 KB
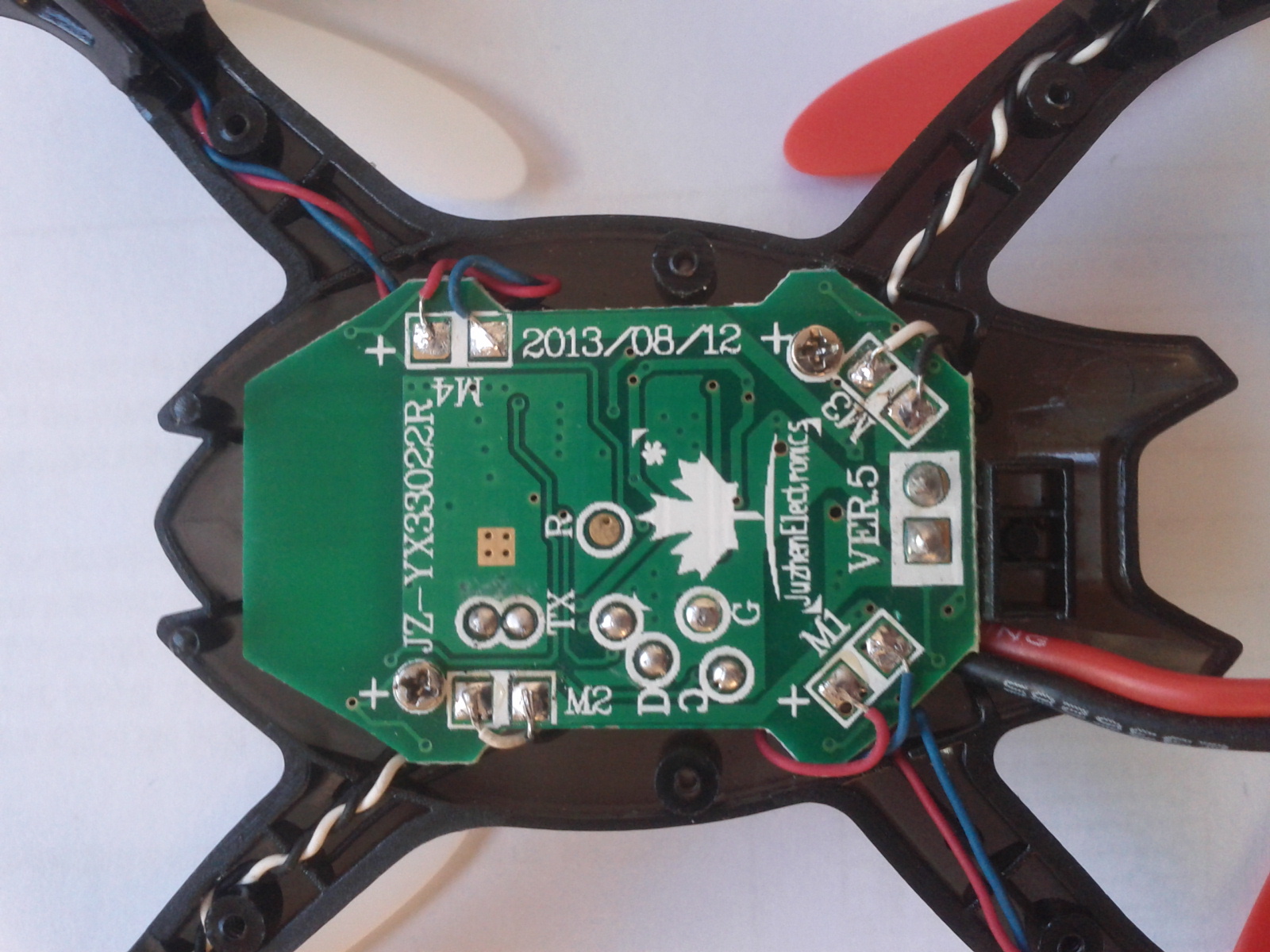
So hab jetzt nur mal ein Foto von der Rückseite. Macht echt Spaß der kleine. Die Funke ist nur ein graus. Ich hoffe ich komme am we dazu meine auf das vermutliche Protokoll umzubauen.
Kille H. schrieb: > So hab jetzt nur mal ein Foto von der Rückseite. Du machst es aber spannend. Die andere Seite ist interessanter :)
Ich kann es kaum noch erwarten bis das teil da ist :) ich hab das ganze hier verfolgt , wann kann jemand sagen was ich brauch um damit zu lernen ? (Programmieren)
Schönen Abend :) Nur kurz zur Info. Ich hätte mich mal im Nuvoton M0 Forum registriert und gefragt ob man das Protokoll bzw. Timing Diagramm für ICP erase bekommen kann. Wie Tim allerdings schon vermutet hat wird da nichts rausgerückt. Der admin meinte nur, er kennt es Protokoll auch nicht und ich soll meinen Distributer fragen ... Bleibt wohl nur, das Ganze wirklich über Nulink zu analysieren. Vielleicht hat man ja Erfolg. Zu den Aliexpress Teilen. Mich macht das skeptisch, weil dort ISP steht. ISP is ja bei Nuvoton der serielle Bootloader. Es kann ja durchaus sein, dass irgendwelche anderen Chinesen oder so das ICP Zeug schon nachgebaut haben und es mit diesem Teil funktioniert, den gelockten Flash zu löschen. Es kann aber denke ich genau so gut sein, dass es mit diesem Teil auch nicht funktioniert.
So weit ich das hier bisher mit gelesen habe, ist es noch nicht ganz so weit. Aber es sieht zumindest vielversprechend aus. --- Kleines Update von meiner Seite: Meine sind heute auch angekommen, am 21.09. bestellt. Interessant: Zollaufkleber auf dem Paket gab an "zollamtlich bearbeitet", habe aber keine Karte oder sonst was bekommen, hat lediglich ca. eine Woche länger gebraucht als ein paar andere CN Bestellungen, die ich etwa zeitgleich (größtenteils später) aufgegeben hatte ...
Turbonator schrieb: > Ich kann es kaum noch erwarten bis das teil da ist :) ich hab das ganze > hier verfolgt , wann kann jemand sagen was ich brauch um damit zu lernen > ? (Programmieren) Das ist im Moment noch etwas unklar, was jetzt wirklich alles genau benötigt wird. Mit einem original Nulink Programmer und dem ICP Tool wird es aber wahrscheinlich funktionieren. Zumindest ist das doch sehr stark anzunehmen :)
Angehängte Dateien:
-

IMG_20131024_203253.jpg
540 KB
Gut dann gibt es halt eine Spielpause Ich finde den jetzt nicht besonders agil. Aber im Vergleich zu meinen WL9x9 find ich das regelverhalten deutlich besser.
Kille H. schrieb: > Gut dann gibt es halt eine Spielpause > > Ich finde den jetzt nicht besonders agil. Aber im Vergleich zu meinen > WL9x9 find ich das regelverhalten deutlich besser. Also sieht aber schon so aus, als wäre da SWD nach außen geführt.
Kille H. schrieb: > Gut dann gibt es halt eine Spielpause > > Ich finde den jetzt nicht besonders agil. Aber im Vergleich zu meinen > WL9x9 find ich das regelverhalten deutlich besser. Danke! Das Board ist ja noch spartanischer. Der SWD-Port scheint tatsächlich herausgeführt zu sein.
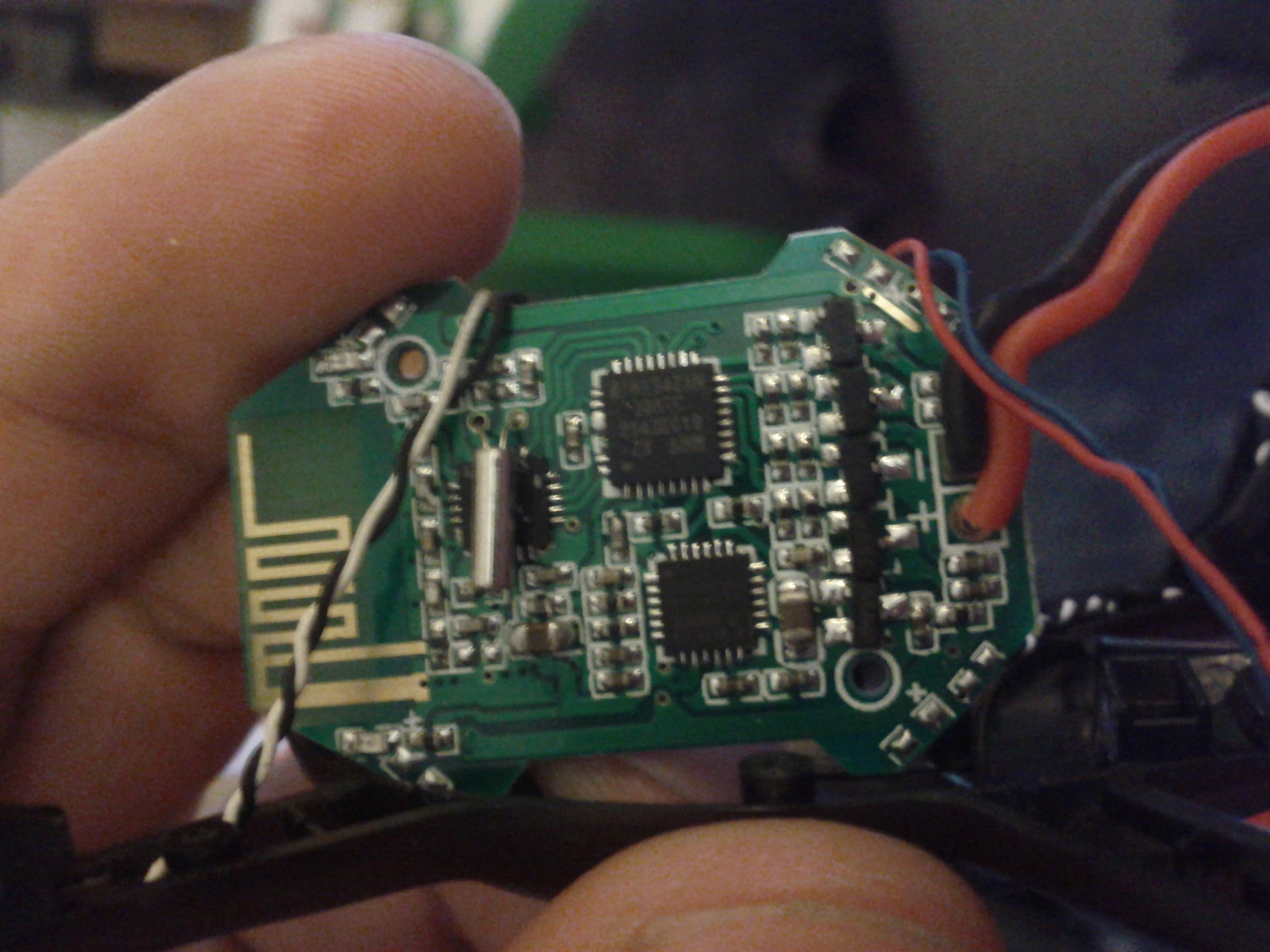
So jetzt auch vom PC aus... Ich denke auch. Auf der Unterseite sind die Pads sogar beschriftet. Insgesammt find ich das Board eigentlich pfiffiger ist, bis auf den Quarz. Warum zweiseitige Bestückung wenns auch einseitig geht ;-)! Der Controller ist definitiv der gleiche, den MPU6050 konnte ich nicht hundertprozentig erkennen, den nrf24L01 nachbau gar nicht. Die Change steht allerdings gut, das die Boards sonst gleich sind!
Nachtrag: Auch, wenn es wahrscheinlich schon hinreichend bekannt ist: das kleine Ding macht höllisch Spass ! [Und das für ~ 20€ ... da habe ich schon öfter schlechtere Unterhaltung für deutlich mehr Geld ertragen.] Die Steuerung ist frickelig, die Kalibrierung erlaubte mir auch nach mehrmaligen Versuchen auf einem (lt. Wasserwaage) absolut planen Untergrund keinen sauberen Senkrechtflug ["in der Luft stehen"], ich muss höllisch viel und sehr sorgsam nachregeln, um das kleine Teil halbwegs sicher durch die Luft zu bewegen. Aber nachdem ich eben das erste Mal einen vorprogrammierten Backflip [Knopf oben rechts an der FB halten, dann rechtes Steuerkreuz bis zum Anschlag nach unten ziehen] gesehen habe, bin ich restlos begeistert. Das kleine Teil hat einen recht aggressiven Backflip auf kleinstem Raum hingelegt. Nicht schlecht für so einen "billigen Klon" ...
Hatte eigentlich schon jemand Erfahrungen mit den alternativen Akkus sammeln können ? Vor allem würde mich interessieren, wie sich die in passender Baugrösse erhältlichen, grösseren Modelle schlagen. Es gibt ja welche mit 340 mAh bis hin zu einem "Monster" mit 750 mAh, all diese werden als "Hubsan X4 compatible" beworben. Wäre interessant, wenn sich damit die Airtime erhöhen liesse.
Ich benutze meine vorhandenen CB100 Akkus. Sind leicht größer, also leider zu breit aber mit einem Gummi kann man die einfach unten drunter hängen. Fliegt damit ganz gut. Haben 3,7V mit 420mAH laut Aufschrift. Die gibts günstig bei Ebay. Hier zb: http://www.ebay.de/itm/NEW-6x-3-7V-400mAh-20C-RC-MINI-Lipo-Battery-FOR-Walkera-4-3B-4G6-4-6-LAMA2-CB100-/300928044632?pt=Radio_Control_Parts_Accessories&hash=item4610b58e58 sind aber halt ein wenig zu breit... aber geht mit nem Gummi...
Klingt ja gut. Lädst Du die auch über das "Hubsan" Ladegerät, oder hast Du dafür ein separates ? Wie sieht es mit Gewicht und Flugzeitgewinn aus ?
Ich lade die über das Ladegerät vom CB100. Ist halt ein Schaltnetzteil. Lade ungern was über meine USB buchsen... Aber sollte wohl auch funktionieren. Vielleicht mit nem 230V auf USB Netzteil und dann das Hubsan dingen. Dauert aber eventuell länger.. Gewicht ist laut Briefwaage 3g schwerer als der "original" Hubsan also 12g. Ob da jetzt die Flugzeit verlängert wird, kp. Denke mal ja. Aber bin dafür noch zu wenig geflogen. Hab erst eine Akku Ladung verflogen bei jeweils einen Akku. Aber selbst wenn.. bei den 13Stück die ich hier rumliegen habe kann ich immer wechseln..
Ich hab ihn mit den Akkus von meinem Helikopter fliegen lassen. Der hat nur 240mAh und ist deutlich kleiner und ich denke auch deutlich leichter. Mit dem Akku macht er noch mal deutlich mehr Spaß. Da ist er agiler, gute Steigleistung aber der Spaß ist natürlich recht schnell wieder vorbei ;-(! Ich hab auch noch andere Akkus, bei meinem passt der Originale schon kaum rein bzw raus. Wirklich zum wechseln ist das so nicht. An drunter schnallen hab ich auch schon gedacht. Dann bezüglich der Kapazität die auf dem Akku steht. Ich hatte verschiedene Akkus für meinen Helikopter. Leider koreliert die Angabe auf dem Akku nur unzureichend mit dem was das Ladegerät anzeigt. Erfahrungsgemäß häufiger mit der Größe. Gerade "Tuning" akkus mit gleicher größe und wunder wie viel mAh waren bei mir keinen deut besser als die Originalen. Ich tendiere lieber zu kleineren. Sind nicht viel teurer pro mAh und der flugspaß ist besser. Ich werde schauen das ich meine 240mAh akkus aus dem Genius CP gut und einfach verwenden kann. Hier passen die Originalen halbwegs, die größeren Akkus fast durch die Bank nicht. Ach ja, es scheint jetzt auch den JD-185 direkt von Frankfurt aus zu geben: http://www.ebay.de/itm/171097513221?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1423.l2649 Grüße
Danke für die Infos, insbesondere an noy. Denke, ich werde dann auch mal mein Glück mit den breiten CB100er Akkus versuchen, der Preis ist ja auch absolut ok und mit 6 Stück gibt's dann auch genügend Reserve.
Der Akku hier hat exakt die selben Maße und den passenden Steckverbinder. Ist in Hobbykings EU Warehouse (Holland) verfügbar (Versand ab 2.80, kein Zoll). http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=36235 Liegt vor mir und ist für gut befunden.
Tim schrieb: > Stefan V. schrieb: >> ihr sucht doch einen ISP-Adapter, das hier könnte was sein: >> >> > http://www.aliexpress.com/item/Free-Shipping-NuLink-BuLink-Compatible-Cortex-M0-M051-ISP-ICP-Program/674565728.html >> >> Gruß >> Stefan > > Sehr interessant, danke! Mich macht nur stutzig dass die Software von > 2011 sein soll und der MINI51 nirgendwo erwähnt wird. Ich habe mal beim > Verkäufer angefragt. Inzwischen habe ich die Antwort vom Verkäufer. Angeblich werden MINI51, ICP und chip erase unterstützt. 100% überzeugt bin ich noch nicht, habe aber mal einen programmierer bestellt.
Mein Quadcopter schaltet sich immernoch ab und zu einfach schlagartig aus. Nachdem er sich ausgeschaltet hat habe ich mal die LiPo-Spannung gemessen und die war so bei 3,6 Volt. Wenn ich dann nochmal Gas gebe bricht die Spannung auf 2,9 Volt ein und da schaltet er sich auch wieder ab. Der Spannungsregler hat eine maximale DropOut-Spannung von 680mV. Wundert mich überhaupt, dass die Elektronik bis runter auf 2,9 Volt Batteriespannung noch läuft. Wäre auf jeden Fall gut, wenn die Firmware mitbekommen würde, dass die Akkuspannung zusammen sackt und Gas weg nimmt. Ich frage mich ob das an meinem Akku liegt, denn zu Anfang hat er sich noch nicht so oft schlagartig ausgeschaltet? Habe den Akku dann mal geladen. Danach habe ich eine Spannung von 4,24 Volt gemessen. Sind die 40mV zu viel schon schädlich für den Akku?
Die 40mV sind zu viel. Allerdings wird das bei fast allen billigen ladegaraten die ich hier so rumfliegen hab so gemacht. Ich schätze einfach, das der langer fliegt. Aber die Akkus sind so billig, da ist mir das egal ob der 50 oder 500 Zyklen hält.
Tim schrieb: > 100% überzeugt bin ich noch nicht, habe > aber mal einen programmierer bestellt. Find ich gut. Wie gesagt, ich werde mir mal trotzdem den Nulink besorgen. Wenn der Nachbau von Aliexpress auch funktioniert, können wir uns das ja möglicherweise mit der Analyse des erase Protokolls sparen. Bei dem Preis lohnt sich dass dann ja schon fast nicht mehr da recht viel Zeit zu investieren. Falls der Nachbau nicht funktioniert, wird wohl reverse engineered :) Aber ich drücke auf jeden Fall die Daumen. Denn wenns funktioniert hat man mit rund 30€ doch eine recht tolle Lernplattform bzw. Experimentierplattform wie ich meine.
ISP ist im Datenblatt beschrieben und SW dafuer kann man runterladen. ICSP benutzt IAP ueber SWD, Kail hat dazu Beispielsourcen.
Chris schrieb: > ISP ist im Datenblatt beschrieben und SW dafuer kann man runterladen. > ICSP benutzt IAP ueber SWD, Kail hat dazu Beispielsourcen. Also soweit wir alle hier glauben muss Keil für erase ein Programm in den RAM laden. Und das darf Keil aber nicht wenn der Flash gelockt ist. Also muss das ICP Tool verwendet werden um den MCU zu entsperren und zu löschen. Oder funktioniert IAP anders? Und ISP ist laut Tim auch gesperrt. Wäre ja auch zu schön ohne extra Hardware über seriell flashen zu können :) Falls ich mich jetzt komplett irre, bitte korrigiert mich.
Manuel Steiner schrieb: > … hat man mit rund 30€ doch eine recht tolle Lernplattform bzw. > Experimentierplattform wie ich meine. Full Ack! Das wäre ein Tipp für viele Schulen mit Arbeitsgemeinschaften. Manuel Steiner schrieb: > Ich habe soeben ein paar Samples von 3020, 4010 und 4020 erhalten. Hast Du die schon mal ausprobiert? Ich weiss nicht, ob Oekel am Montag wieder bei Mouser bestellt. Die sind alle lieferbar, kosten 2,50€ und haben I²C, 16 bit und 1..200mm. Und nun? Zur not bestelle ich auch jeweils einen.
Torsten C. schrieb: > Hast Du die schon mal ausprobiert? Nein, sorry. Ich hoffe ich komme demnächst dazu. Wir müssen mal schauen wo wir die auflöten. Die sind nämlich wirklich ziemlich klein und QFN Pads, also da muss irgend ein PCB oder so her, sonst glaub ich bekommt man die nicht ordentlich wo aufgelötet.
Manuel Steiner schrieb: > Wir müssen mal schauen wo wir die auflöten. OK, dann nehme ich ein paar VCNL4010. Der Pin-Abstand ist etwas größer und damit leichter zu löten. Ansonsten habe ich nur in "Fig. 3 - Proximity Value vs. Distance" einen leichten Unterschied gefunden. Der VCNL4010 kann vielleicht bei geringeren Abständen noch etwas besser messen. Die Sensoren sind nämlich dichter beieinander (2,47mm statt 3,46mm). Der VCNL3020 hat keine "ambient light photo-pin-diode". PS: Ich lasse mir bei Jakob ein paar "Breakouts" dafür machen.
Manuel Steiner schrieb: > Chris schrieb: >> ISP ist im Datenblatt beschrieben und SW dafuer kann man runterladen. >> ICSP benutzt IAP ueber SWD, Kail hat dazu Beispielsourcen. > Falls ich mich jetzt komplett irre, bitte korrigiert mich. Mit ISP wenn dies eingeschalten ist, kann man definitiv den Kontroller umprogrammieren, auslesen geht nicht, bzw nur das Data Flash, vergleichbar dem EEprom im AVR. Auch beim AVR, wenn security bit gesetzt kann man das Programm nicht auslesen, man kann aber ein neues Programm flashen. Ich verstehe, daß man Bedenken hat, wenn ein funktionierendes Teil lahmgelegt wird durch Umprogrammierung, und wenn dies nicht passt, das Teil nun nutzlos ist. Kann denn niemand die Config bits auslesen, dies geht immer. Daraus lässt sich dann konkreter schließen, was machbar ist. Glück wäre natürlich, wenn man die FW auslesen könnte, was ich nicht glaube.
chris schrieb: > Mit ISP wenn dies eingeschalten ist, kann man definitiv den Kontroller > umprogrammieren Richtig, aber ISP ist bei Nuvoton der serielle Bootloader. Und der ist laut Tim gesperrt. Das Ganze ist bei ARM nicht wie bei AVR Teilen. Da ist ein gewaltiger Unterschied. chris schrieb: > Glück wäre natürlich, wenn man die FW auslesen könnte, was ich nicht > glaube. Wie schon mehrfach in dem Thread geschrieben, sind die Lockbits gesetzt.
chris schrieb: > Mit ISP wenn dies eingeschalten ist, kann man definitiv den Kontroller > umprogrammieren, auslesen geht nicht, bzw nur das Data Flash, > vergleichbar > dem EEprom im AVR. Auch beim AVR, wenn security bit gesetzt kann man das > Programm nicht auslesen, man kann aber ein neues Programm flashen. Ich glaube du vergisst hier eine ganz wichtige Sache: Es handelt sich um einen ARM Mikrocontroller. Ein ARM Controller hat nichts (oder sagen wir fast nichts) mit einem AVR gemeinsam. Das ist eine andere Architektur. chris schrieb: > Kann denn niemand die Config bits auslesen, dies geht immer. Geht nicht so einfach, aus den Gründen wie oben bereits erwähnt. Beschäftige dich mal mit ARM, CMSIS und kau mal die Refernece Manuals von ST, NXP und Nuvoton durch. Du wirst (hoffentlich) feststellen, dass mit ISP nicht alles möglich ist und es hier auch Hardware bzw. Hersteller-spezifische Modien für die Programmierung und Konfiguration der Controller gibt. Aber genug OT von mir...
Habt ihr alle eure Flattermaxe kaputtgespielt und wartet auf die neue Lieferung oder warum ist hier tote Hose ;-)
Ich warte auf das Zweitexemplar und darauf, dass mal einer das Protokoll für für ICP erase postet oder Tim bestätigt, dass das mit dem "BuLink" geht.
Ich warte noch auf ersatzteile und einen zweiten, den ich dann kaputtprogrammieren kann
Übrigens verwenden auch alle größeren "Brüder" aus der V2X2 Bande ein ähnliches Board mit dem selben Controller: http://www.banggood.com/WLtoys-V222-RC-Quadcopter-Spare-Parts-Receiver-Board-p-77477.html Ich gehe mal davon aus, das alle von einander abgeleitet sind. Das heißt einmal gehackt mit vielen Modellen Potentieller Spaß!
Und nochbesser... Es wäre eine weitere billige Alternative für ne FC in nem selbstbau. Bisher steht das FlyingF3 mit Taulabs in dem Preissegment und dem können ziemlich alleine da... Zumindest wüsste ich kein anderes was so günstig und Leistungsstark ist..
Ja das stimmt. Die wurden auch komplett integrierte FCboards incl. RX darstellen. Kleiner und billiger geht dann kaum noch.
Oliver Stellebaum schrieb: > warum ist hier tote Hose ;-) Die Zeit zwischen zwei Flugrunden, reicht nicht um sinnvolle Artikel zu posten, oder um mal eben das Programmier-Protokoll zu hacken :-) Und solange, wie ich mit dem Ding noch in allen Ecken Staub aufwirbeln kann, wird er auch nicht zerlegt. Grüße Michael P.S.: Wobei die Höhenregulierung wirklich eine Optimierung gebrauchen kann.
Kaputtgespielt, und tmart.com ist ein komischer Laden mit Fake-Trackingnummern oder so.
Frust loswerden verstehe ich ja, aber wenn der Beitrag etwas Sinn machen soll, dann fehlen noch ein paar Infos. hubsi schrieb: > Kaputtgespielt Sprich: Erfolgreich ein "hello world" (LED-blinken) geflasht? > und tmart.com ist ein komischer Laden mit Fake-Trackingnummern oder so. Was hast Du denn dort worüber bestellt? Ebay? Aliexpress?
Torsten C. schrieb: > Frust loswerden verstehe ich ja, aber wenn der Beitrag etwas Sinn machen > soll, dann fehlen noch ein paar Infos. Sorry, ich schrieb weiter oben, dass es dort Ersatzteile gibt und wollte mit dem letzten Post darauf hinweisen, dass der Laden wohl doch etwas komisch ist, respektive nicht unbedingt zu empfehlen.
Habe gerade im Keller ein Dev-Kit von Nuvoton gefunden. Hatte ich mal bei nem Gewinnspiel abgestaubt und wusste bisher nix damit anzufangen. Kann ich damit schon mal weiterhelfen? So ein Hubsan Klon fliegt bei mir schon seit ein paar Wochen. Fände das auch shr interessant wenn man damit was anstellen könnte.
Robert Knipp schrieb: > Kann ich damit schon mal weiterhelfen? Na klar :) Am besten mal mit dem PC verbinden und schauen, ob das ICP Tool damit funktioniert (ob das ICP Tool den am Devkit verbauten Nulink erkennt). http://download.nuvoton.com/NuvotonMOSS/DownloadService/Member/DocumentsInfo.aspx?tp_GUID=SW0520101208200310 Edit: Was für ein Devkit ist es denn?
Angehängte Dateien:
-

image.jpg
1,3 MB
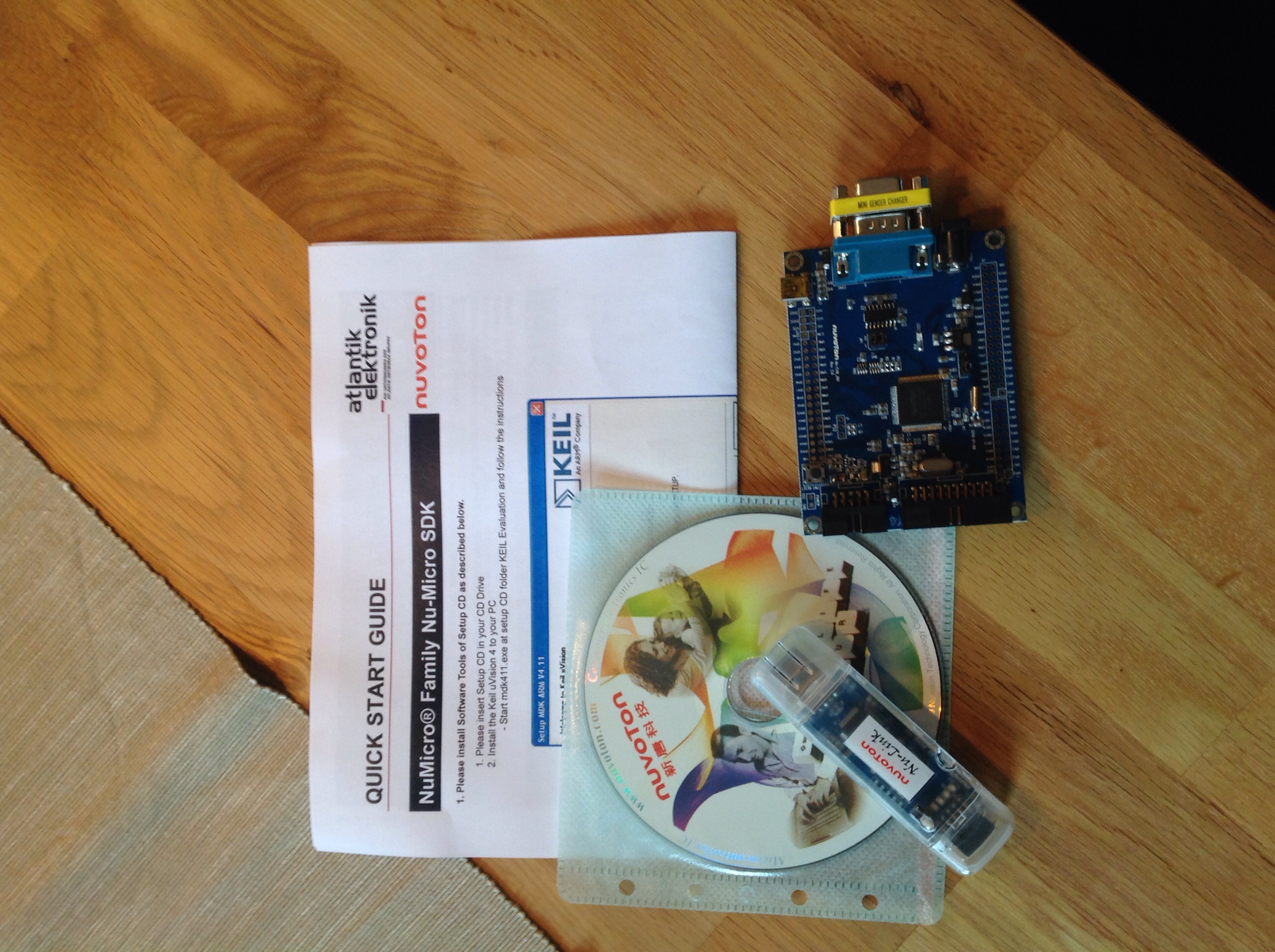
Steht keine Bezeichnung drauf. Habe mal ein Foto vom Inhalt gemacht. Ist jedenfalls ein NuLink dabei. Dann probiere ich das heute abend mal aus.
Ah da ist ja sogar ein extra Nulink dabei ... Na mit dem sollte das ICP Tool auf jeden Fall funktionieren :) Das ist sogar eines der teureren SDKs die Nuvoton im Angebot hat, weil da eben ein extra voll funktionsfähiger Nulink dabei ist.
Angehängte Dateien:
-

2592px_1936px.jpg
5,3 KB
Robert Knipp schrieb: > Dann probiere ich das heute abend mal aus. Ich bin auch gespannt. :-) Aber wenn Du probierst, ob "ICP erase" geht: Fliegt er danach denn noch? BTW: Bevor wieder ein Mod schimpft wegen der Bildformate: Da sieht man ja jedes Detail. :-)
Torsten C. schrieb: > Fliegt er danach denn noch? Dann macht der wohl gar nix mehr :) Dann is ja die Firmware im MCU weg.
Angehängte Dateien:
-

Unbenannt.PNG
57 KB
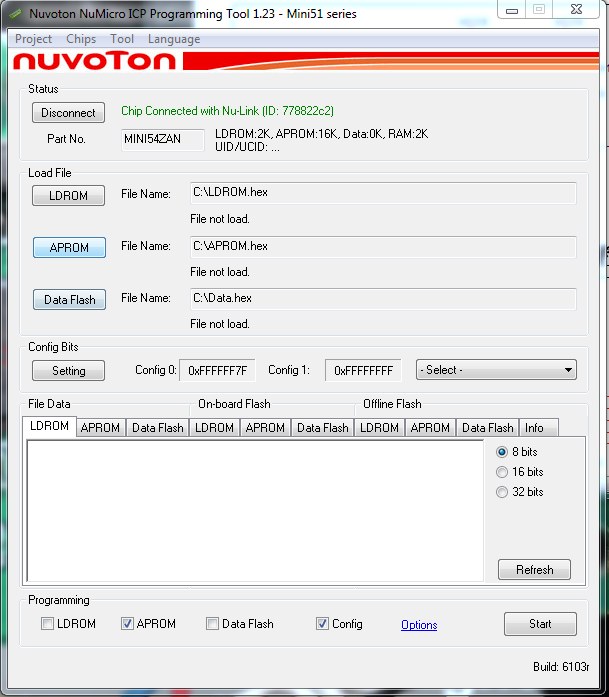
So, nach einem FW Update des NuLink scheint es funktioniert zu haben. Als ich die Kopterplatine rangesteckt hatte, meldete das ICP sofort dass er gelockt ist und fragte ob er versuchen soll ihn zu löschen. Auf OK geklickt und nun meldet ICP das beim Connect nicht mehr.
Ja also ich glaub sobald man den jetzt einmal unlocked und erased hat, kann man danach auch mit Keil und dem SWD vom Discovery Board drauffahren, weil der kann dann ja wahrscheinlich sein erase Programm in den RAM laden. Vermute ich jetzt mal so. Aber fürs erste mal muss man das eben so machen.
Also wie müsste ich dann jetzt weiter machen? Brauche ich ein Discovery Board? (Wollte eh eins bestellen) Habe hier noch ein EFM32-G8xx-STK mit nem Gecko von Energy Micro. Das wird bei Keil auch aufgelistet. Ob das auch geht? Da ist jedenfalls auch ein Debugging Interface drauf.
Warum benutzt du nicht den NuLink? Dafür gibt es anscheinend einen Treiber für Keil: http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=4b47b09d-b116-4ccd-aa85-31e261a87d30 Herzlichen Glückwunsch zu deinem Brick-Copter :-P
Marius S. schrieb: > Warum benutzt du nicht den NuLink? Dafür gibt es anscheinend einen > Treiber für Keil: > http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=4b47b09d-b116-4ccd-aa85-31e261a87d30 Jo, den Treiber habe ich auch gerade gefunden. Muss nur noch herausfinden wie ich in Keil auf den Controller komme. > Herzlichen Glückwunsch zu deinem Brick-Copter :-P naja, einer musste es ja mal testen. Vertraue darauf, dass Ihr eine bessere FW entwickelt ;.) Zum Spielen bestelle ich halt nen neuen.
Robert Knipp schrieb: > Muss nur noch herausfinden wie ich in Keil auf den Controller komme. Tim hat weiter oben im Thread mal Keil Projekt angehängt. Evtl. hilft das ja. ... Ich würde natürlich auch den Nulink einfach weiter verwenden. Ich wollte in meinem vorigen Post nur ausdrücken, dass sobald der MCU nicht mehr gelockt ist, man den Nulink wahrscheinlich nicht mehr braucht, sondern auch ein Teil mit SWD reicht.
Robert Knipp schrieb: > naja, einer musste es ja mal testen. Hut ab! Danke. :-) > Vertraue darauf, dass Ihr eine bessere FW entwickelt Echt Cool! Die Motivation scheint hoch zu sein und das "Team" (kann man das schon so nennen?) ist ja auch schon ziemlich groß. Das sind gute Voraussetzugen. Noch ein paar Wochen, und es wird Zeit für ein Team-Meeting. Vielleicht nicht wie früher in einer Kneipe mit Anreise per Auto oder Bahn, aber vielleicht online, also wenigstens mit Audio und Video.
Manuel Steiner schrieb: > Tim hat weiter oben im Thread mal Keil Projekt angehängt. Evtl. hilft > das ja. Build läuft nicht...
1 | Build target 'Mini51 CFG' |
2 | compiling FlashPrg.c... |
3 | FlashPrg.c: error: C3903U: Argument '/ropi/rwpi' not permitted for option 'apcs'. |
4 | ".\Mini51_CFG.axf" - 1 Error(s), 0 Warning(s). |
5 | Target not created |
Ich habe leider noch nie mit Keil oder einem 32bit Controller gearbeitet. Daher sagt mir das jetzt nix.
Ich frag mich ob Tim das Projekt nicht mit der konstenlos erhältlichen Lite Version erstellt hat bzw ob der Build bei ihm gelaufen ist. Ich hoffe er kann mehr dazu sagen :). Ich hab nämlich bei den Einschränkungen gefunden:
1 | The compiler and assembler do not generate position-independent code or data. |
2 | The --apcs /ropi /rwpi /pic/ pid compiler and assembler command line options are disabled. |
Weiters:
1 | The linker does not accept scatter-loading description files for sophisticated memory layouts. |
2 | The --scatter command line option is disabled. |
Im Projekt ist ja auch ein File enthalten, in dem als Kommentar in der ersten Zeile "scatter-loading" steht. Ich bin zur Zeit leider unter Linux und kann grad nicht ins Keil. Tim hat auch in einem früheren Post mal ein uvproject File hochgeladen, ohne Sourcen: https://www.mikrocontroller.net/attachment/194816/jxdhack.uvproj Vielleicht kann man das ja als Vorlage benutzen und eigene Sourcen zum Projekt hinzufügen. Man wird wohl sicherlich mal die ganzen CMSIS Libs von der Nuvoton Homepage brauchen. Ich hab den MCU auch noch nicht vor mir liegen, weil der Quadcopter noch nicht da ist, von daher ist das im Blindflug etwas schwierig :/ Vielleicht kommen wir mal gemeinsam zu einem Template Projekt, welches dann jeder verwenden kann, wenn er möchte.
Robert Knipp schrieb: > So, nach einem FW Update des NuLink scheint es funktioniert zu > haben. > Als ich die Kopterplatine rangesteckt hatte, meldete das ICP sofort dass > er gelockt ist und fragte ob er versuchen soll ihn zu löschen. Auf OK > geklickt und nun meldet ICP das beim Connect nicht mehr. Hey, das sind super Neuigkeiten! Damit sollte einer neuen Firmware nichts mehr im Wege stehen. Hast Du zufällig auch einen logicanalyzer, um den chip-erase Vorgang zu protokollieren?
Robert Knipp schrieb: > Also wie müsste ich dann jetzt weiter machen? Brauche ich ein Discovery > Board? (Wollte eh eins bestellen) Habe hier noch ein EFM32-G8xx-STK mit > nem Gecko von Energy Micro. Das wird bei Keil auch aufgelistet. Ob das > auch geht? Da ist jedenfalls auch ein Debugging Interface drauf. Der erste Test wäre ein Blinky-Programm :) Die LEDs sind ja schon angeschlossen. Wie oben schon geschrieben, unterstützt Keil auch Nulink. Du müsstest Dir also Keil mit Legacy device support installieren (siehe mein Post oben). Ich glaube als nächsten Schritt müssten wir erst einmal die Schaltung dokumentieren, damit klar ist, welche Peripherie an welchem Port hängt.
Manuel Steiner schrieb: > Robert Knipp schrieb: >> Muss nur noch herausfinden wie ich in Keil auf den Controller komme. > > Tim hat weiter oben im Thread mal Keil Projekt angehängt. Evtl. hilft > das ja. Mit den Projekten lässt sich allerdings nicht viel anfangen. Das eine ist ein leeres Dummy-projekt zum Debuggen ohne Source. Das Andere was der Sourcecode für den SWD-Softwareupdate. Ich bin gerade nicht zu Hause, kann am WE aber mal versuchen ein Testprojekt in Keil zu erstellen. Auf den Seiten von Nuvoton gibt es Archive mit Beispielprojekten für Keil: http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=4b47b09d-b116-4ccd-aa85-31e261a87d30 Ich denke wir müssten wegen des kleinen Flash auf die "DirectRegisterAccess" Variante zurück fallen. Die Startupcode kann Keil übrigens auch über den Projektwizard erzeugen.
Um dieses Archiv geht es:
> Mini51 SeriesBSP_DirectRegisterAccess_EN_V1.01.002.zip
... und ein Blinky-Projekt war auch dabei. Es muss nur noch der Port angepasst werden. (Auf welchem Port ist die LED angeschlossen?)
Tim (cpldcpu) schrieb: > Auf welchem Port ist die LED angeschlossen? Sind die überhaupt am MCU angeschlossen oder einfach an die Spannungsversorgung? Es geht ja richtig voran, juhu :) Mein Quad könnte auch schon langsam kommen. Jetzt fehlt wirklich dann auch nur mehr eine Methode, mit der man sich nicht einen Nulink zulegen muss. Entweder auf den Bulink hoffen oder wie gesagt spätestens wenn der Quadcopter bei mir ist werde ich mit dem Nulink mal das erasen analysieren.
Manuel Steiner schrieb: > Tim (cpldcpu) schrieb: >> Auf welchem Port ist die LED angeschlossen? > > Sind die überhaupt am MCU angeschlossen oder einfach an die > Spannungsversorgung? Die LEDs zeigen einige Statusinformationen an (Bind usw.). Daher sind sie wohl mit dem Controller verbunden.
Noch ne Frage an Tim, Torsten, Robert und co.: Wäre dann auch eventuell mal eine Wiki Page interessant, auf der wir die ganzen Informationen zusammentragen? Ich persönlich halte das für eine gute Idee, möchte aber nicht jetz einfach eine Wiki Page erstellen, obwohl ich das Ding noch gar nicht bei mir zu Hause habe. Ich würde aber auf jeden Fall daran dann mitarbeiten.
Tim (cpldcpu) schrieb: > Die LEDs zeigen einige Statusinformationen an (Bind usw.). Daher sind > sie wohl mit dem Controller verbunden. Ah ok, cool. Wie gesagt, für mich ist es im Moment noch ein wenig schwierig, weil das Teil noch nicht da ist :)
Manuel Steiner schrieb: > Noch ne Frage an Tim, Torsten, Robert und co.: > > Wäre dann auch eventuell mal eine Wiki Page interessant, auf der wir die > ganzen Informationen zusammentragen? > > Ich persönlich halte das für eine gute Idee, möchte aber nicht jetz > einfach eine Wiki Page erstellen, obwohl ich das Ding noch gar nicht bei > mir zu Hause habe. Ich würde aber auf jeden Fall daran dann mitarbeiten. Da hattest Du den gleichen Gedanken. Ich habe gerade einen Organization-Account auf Git-Hub erstellt: https://github.com/hack-opter Das ist sehr praktisch, um sich Aufgaben zu teilen und Code abzulegen. Ich werde am WE mal anfangen das hochzuladen, was sich schon angesammelt hat. Um dort Mitglied zu werden und Schreiben zu können, benötigt Ihr einen kostenlosen GIthub-account. Lesen ist für alle kostenlos. Ich denke zur Dokumentation macht zusätzlich ein Wiki-Artikel auf µcontroller.net Sinn.
>Lesen ist für alle kostenlos.
Lesen ist für alle möglich.
(habe leider meine Login-Daten auf diesem Rechner nicht.)
Ich hab mich mal angemeldet. Git ist ja so ähnlich wie Mercurial, Von da her kenn ich mich da auch schon ein wenig aus :) @Tim: Kann man das Projekt dann einfach clonen und auschecken, oder musst du mich da als Member im Projekt eintragen?
Manuel Steiner schrieb: > Ich hab mich mal angemeldet. Git ist ja so ähnlich wie Mercurial, Von da > her kenn ich mich da auch schon ein wenig aus :) Wie ist denn Dein Name? Dann kann ich Dich gleich hinzufügen :) > @Tim: Kann man das Projekt dann einfach clonen und auschecken, oder > musst du mich da als Member im Projekt eintragen? Forken, clonen und pull-requests submitted kann jeder. Damit zu Pull-requests in das Master repository mergen kannst, muss ich Du allerdings Mitglied der Organisation werden und ich muss Dich freischalten.
Alles klar Edit: Mein Username bei Github: steinerhippo, so wie im Forum
Tim (cpldcpu) schrieb: > Hey, das sind super Neuigkeiten! Damit sollte einer neuen Firmware > nichts mehr im Wege stehen. Hast Du zufällig auch einen logicanalyzer, > um den chip-erase Vorgang zu protokollieren? Jein, der MockUp LA liegt halb zusammengebaut im Keller. Da könnte ich mich aber morgen mal ransetzen. Heute wird das leider nichts mehr. > ... und ein Blinky-Projekt war auch dabei. Es muss nur noch der Port > angepasst werden. (Auf welchem Port ist die LED angeschlossen?) Versuche ich morgen auch mal zu testen. Manuel Steiner schrieb: > Es geht ja richtig voran, juhu :) Mein Quad könnte auch schon langsam > kommen. Jetzt fehlt wirklich dann auch nur mehr eine Methode, mit der > man sich nicht einen Nulink zulegen muss. In den nächsten Tagen, vielleicht schon morgen müsste mein Discoveryboard kommen. Wir könnten also meinen NuLink auch erstmal rumschicken im Vertrauen darauf dass er irgendwann auch wieder zurück kommt. Falls jemand aus dem Raum Hannover unter euch ist könnte man sich auch treffen, ginge noch schneller. Nur ein Angebot, da sich ja vielleicht nicht jeder nur zum Löschen eines Chips so ein Teil kaufen will.
Hm noch einfacher und vll. billiger wäre es einfach jeweils das Board des Quad mit Rückumschlag zu dir zu schicken und du löscht es. Zumindest für die Leute die es nciht selber können.
No y. schrieb: > Hm noch einfacher und vll. billiger wäre es einfach jeweils das Board > des Quad mit Rückumschlag zu dir zu schicken und du löscht es. Zumindest > für die Leute die es nciht selber können. Könnte ich dann auch anbieten, wenn der Nulink da ist. Nachteil bei mir ist allerdings, dass ich aus Österreich bin. Bevor das aber alle haben wollen, sollten wir noch testen, ob der nicht gelockte MCU auch wirklich über das Discovery SWD beschreibbar ist. Nicht dass wir die Platinen unnötig hin- und herschicken und das mit SWD doch nicht so funktioniert wie es soll. Ich gehe aber davon aus, dass es geht.
Am besten wäre es, auf dem Discovery ein kleines Programm zu implementieren, welches nur den chip-erase Teil übernimmt. Dazu müsste man den Vorgang mindestens einmal mit einem LA mitschneiden.
Ich meine abgesehen davon sollten wir schon mal prüfen, ob wir wirklich den Flash mit dem Discovery SWD beschreiben können. Nicht dass hierbei auch noch unerwartete Probleme auftreten. Weil dann würde man ja sowieso wahrscheinlich einen Nulink brauchen oder man flasht einmalig einen Bootloader für ISP. Tim schrieb: > Am besten wäre es, auf dem Discovery ein kleines Programm zu > implementieren, welches nur den chip-erase Teil übernimmt Ja das wäre natürlich für alle die beste Lösung. Außer der Bulink kann das auch alles :)
No y. Schrieb: > Hm noch einfacher und vll. billiger wäre es einfach jeweils das Board > des Quad mit Rückumschlag zu dir zu schicken und du löscht es. Zumindest > für die Leute die es nciht selber können. So können wir es natürlich auch machen. Manuel Steiner schrieb: > Ich meine abgesehen davon sollten wir schon mal prüfen, ob wir wirklich > den Flash mit dem Discovery SWD beschreiben können. Nicht dass hierbei > auch noch unerwartete Probleme auftreten. Weil dann würde man ja sowieso > wahrscheinlich einen Nulink brauchen oder man flasht einmalig einen > Bootloader für ISP. Mein Discovery wurde heute verschickt. Sobald es da ist teste ich es gleich .
Eventuell könnte das "nutiny-sdk-m051" eine gute Wahl sein. Digikey hat es für 26$ im Angebot. Das ist dann ein kleiner Nulink plus eine Breakoutplatine für den Mini51.
Meiner ist heute angekommen - bestellt am 26.09. Fliegen mit dem Teil habe ich mir einfacher vorgestellt...
Torsten S. schrieb: > Fliegen mit dem Teil habe ich mir einfacher vorgestellt... Ich auch... ;-) ...
Georg G. schrieb: > Eventuell könnte das "nutiny-sdk-m051" eine gute Wahl sein. Digikey hat > es für 26$ im Angebot. Das ist dann ein kleiner Nulink plus eine > Breakoutplatine für den Mini51. Manuel Steiner schrieb: > Torsten C. schrieb: >> - NUTINY-SDK-M051 > > hat glaub ich laut Atlantik Homepage auch keine ICP Funktion Wie bereits geschrieben ist bei den Nutiny SDKs Vorsicht geboten, falls ICP mit unlock und erase verwendet werden soll ...
Manuel Steiner schrieb: > Wie bereits geschrieben ist bei den Nutiny SDKs Vorsicht geboten, falls > ICP mit unlock und erase verwendet werden soll ... Laut Nuvoton Seite wird ICP unterstützt. http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=c78adfaf-87ca-46d1-a15a-0d33583c2797
In der Nuvoton Präsentation die weiter oben verlinkt ist war zum Nutiny NUC100 und NUC120 auch zu lesen, dass kein ICP unterstützt wird und auf der Homepage steht es wird unterstützt. Also ist Nuvoton hier sehr inkonsistent was Angaben betrifft. Wenns irgendwem die 26$ bzw bei uns wahrscheinlich auch genau so viele € wert ist, kann er sichs ja mal gern besorgen. Ein dedizierter Nulink ist da aber auch nicht mehr recht teurer und mit dem funktionierts 100%, wie wir dank Robert festgestellt haben. Ich will hier natürlich keinen davon abhalten, sich ein SDK zu kaufen. Ich äußere nur die Bedenken die wir hier schon mal festgehalten haben.
So, da mein erster solangsam komische geräusche von den Motorlagern gibt möchte ich mir mal nen 2. bestellen. So habe ich dann zum einen alle Ersatzteile nochmal und das günstiger als die Ersatzteile einzeln zu bestellen. Zum anderen kann ich den einen zum Programmieren missbrauchen und trotzdem fliegen. Wie sieht es denn mit der Qualität mit denen aus Frankfurt aus? Oder z.B: http://www.ebay.de/itm/RC-Ferngesteuerter-Quadrocopter-Quadcopter-Multicopter-Drohne-UFO-/200978469863?pt=RC_Modellbau&var=&hash=item2ecb4013e7 Da wären so Schutzringe bei. Dürfte wohl der selbe sein. Nur vom Plastik weiß ich es nicht so richtig. Der "Original" China den ich hier hab hält bisher sehr gut. Bei den anderen Gehäusen aus Frankfurt weiß ich es so nicht. Kann jemand dazu was sagen?
No y. schrieb: > Da wären so Schutzringe bei. Dürfte wohl der selbe sein. Nur vom Plastik > weiß ich es nicht so richtig. Der "Original" China den ich hier hab hält > bisher sehr gut. Bei den anderen Gehäusen aus Frankfurt weiß ich es so > nicht. > > Kann jemand dazu was sagen? Also ich habe meinen Klon von DX. Hat bisher zig teilweise üble Abstürze hinter sich und funktioniert immer noch 1A (bis zum Löschen des Controllers). Habe bisher nur einen Prop verloren. Ist wohl unter einem Schrank gelandet.
No y. schrieb: > Ist das denn so einer wie die aus Frankfurt? Das ist meiner: http://dx.com/p/219612
Hallo zusammen, Habt Ihr denn schon einmal versucht die Schaltpläne zu den verschiedenen Versionen aufzunehmen? Wenn der Mikrocontroller schon einmal leer ist würde ich damit doch anfangen. Gruß Martin
Hannes Lux schrieb: > Torsten S. schrieb: >> Fliegen mit dem Teil habe ich mir einfacher vorgestellt... > > Ich auch... ;-) > > ... Gut zu wissen Hannes. Dann sind wir ja beide Co-Piloten ;) Käffchen?
Manuel Steiner schrieb: > Ich würde aber auf jeden Fall daran dann mitarbeiten. Ich auch. Machen wir denn alles im hack-opter-github oder brauchen wir noch eine Wiki-Seite? http://www.mikrocontroller.net/wikisoftware/index.php?title=Hack-Opter&action=edit Ich bin "TorstenC" bei github.
Torsten S. schrieb: > Gut zu wissen Hannes. Dann sind wir ja beide Co-Piloten ;) Nicht mehr, ein guter Freund (75 km südlich) hat mir das Ding abgeschwatzt. Ich wollte damit eigentlich nur mal testen, ob ich damit umgehen kann und ob sich später dann die Anschaffung einer FlyCam lohnt. Ich habe mich aber dafür entschieden, bei der auf Gartenbahngleisen fahrenden Train-Cam zu bleiben und die Helis Helis sein zu lassen... http://www.youtube.com/channel/UCEbswoJIlUy-rokhdFtW6xw/videos Man kann nicht überall mitmischen... > Käffchen? Ja sicher doch! - Sofern es Deine knappe Zeit erlaubt. ...
Torsten C. schrieb: > Ich auch. Machen wir denn alles im hack-opter-github oder brauchen wir > noch eine Wiki-Seite? > > http://www.mikrocontroller.net/wikisoftware/index.php?title=Hack-Opter&action=edit Github ist gut, um Daten auszutauschen. Damit Außenstehende verstehen, worum ist überhaupt geht, wäre ein Wiki-Artikel sinnvoll.
Tim schrieb: > Github ist gut, um Daten auszutauschen. Damit Außenstehende verstehen, > worum ist überhaupt geht, wäre ein Wiki-Artikel sinnvoll. Github selber bietet auch Wiki-Funktionen; welche sogar von Nicht-Projektmitgliedern editiert werden dürfen: https://github.com/blog/774-git-powered-wikis-improved Ich persönlich finde es immer angenehmer, alle Infos an einer zentralen Stelle zu haben.
Moritz A. schrieb: > Github selber bietet auch Wiki-Funktionen; Hier in diesem Forum gibt es aber schon ein Wiki. Und ein Respository ist auch vorhanden. Ist alles da, es kann sofort losgelegt werden. ...
Ja, ich denke man sollte das Mikrocontroller Wiki nehmen. Das Repository kenne ich nicht, aber ich habe Zweifel dass es an die Mächtigkeit von Github heran kommt. Github hat auch den Vorteil, dass man eine evtl. entstehende Firmware auch nicht-deutschsprachigen näherbringen kann.
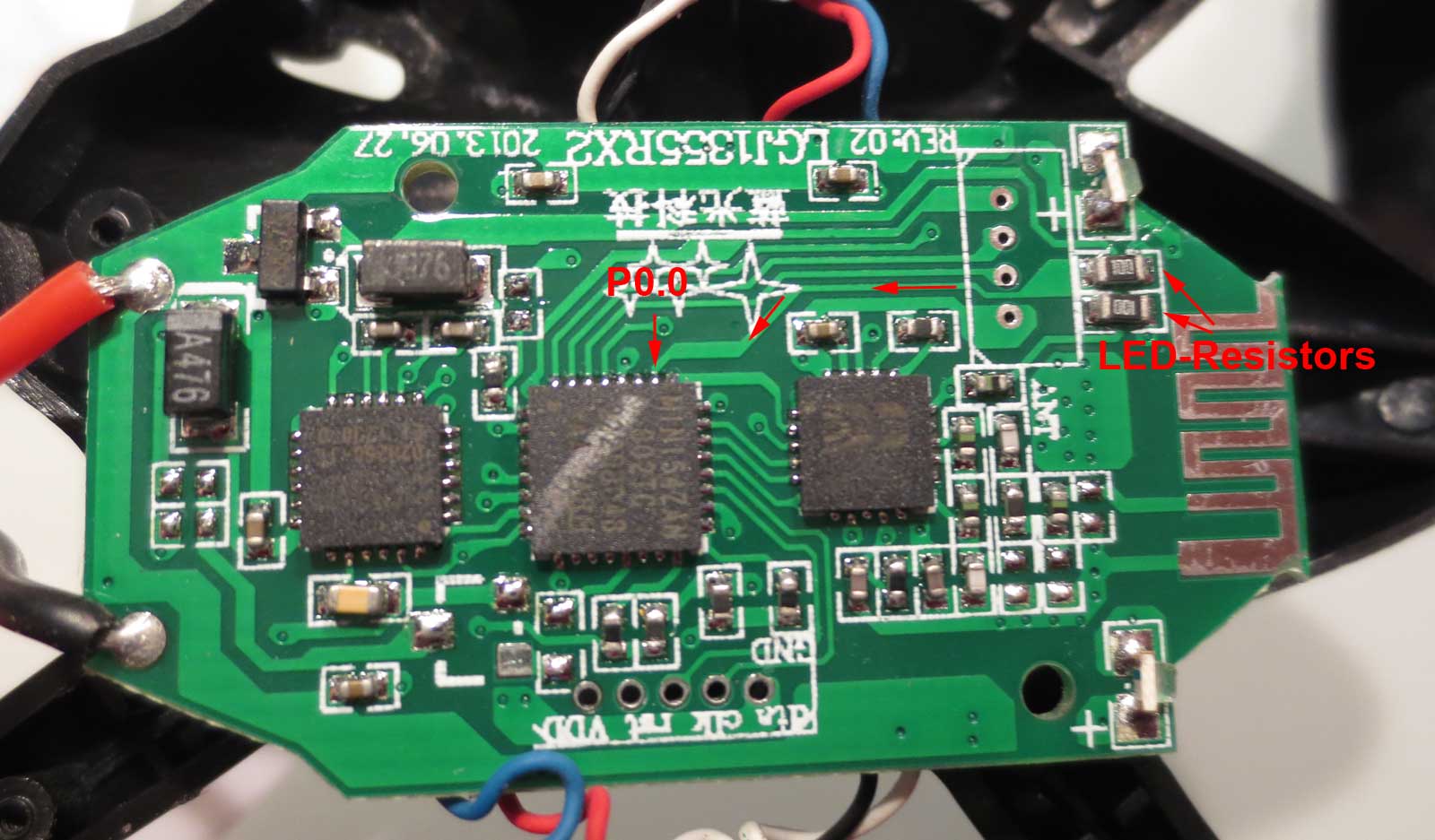
Angehängte Dateien:
-

LED-Circuit.jpg
140 KB
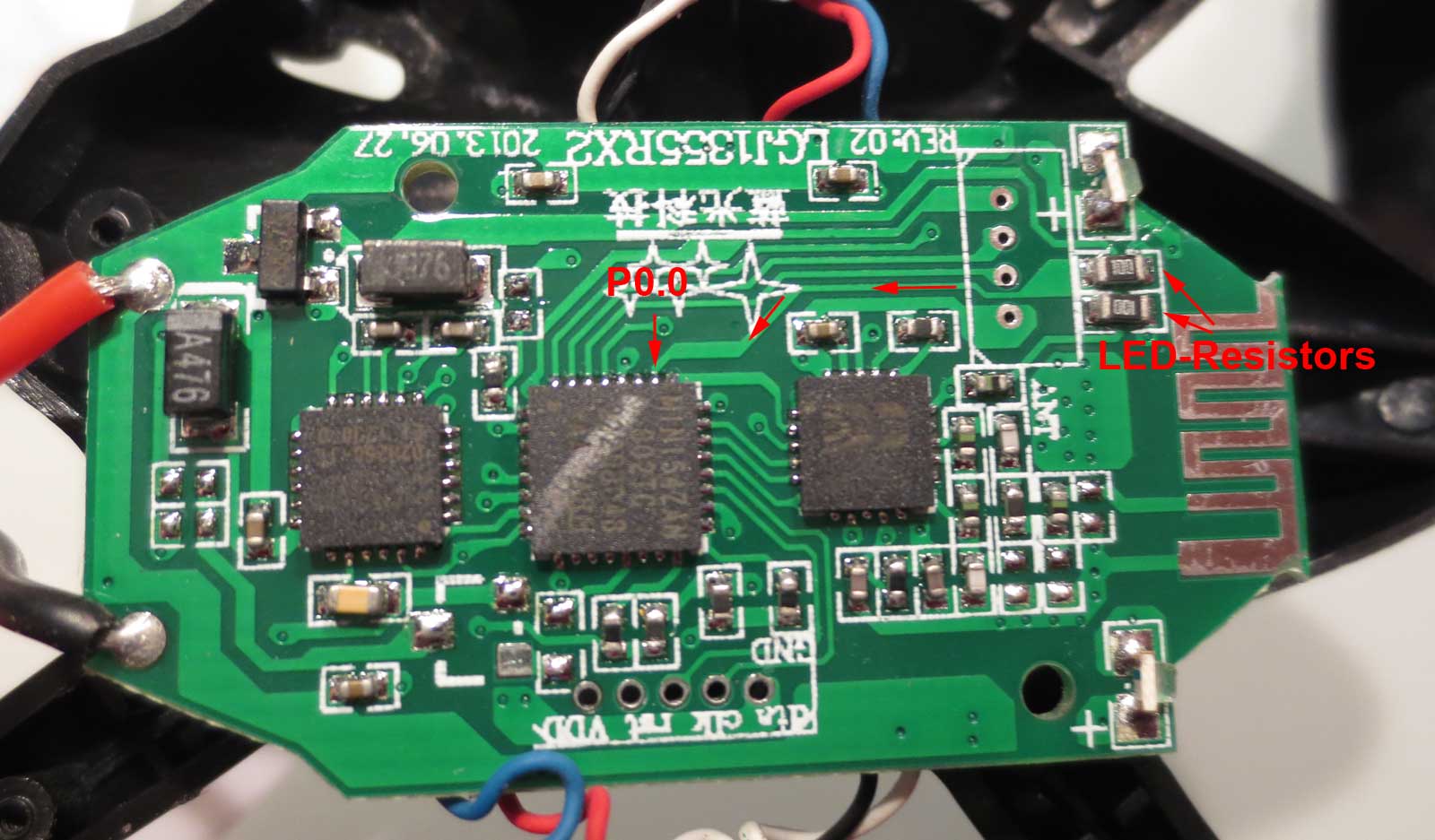
Die LEDS sind übrigens an P0.0 angeschlossen. Das Blinky-Programm sollte also nur diesen Port ansprechen. Ich habe das Repository schon mit einigen Daten gefüllt: https://github.com/hack-opter/Documentation Fühlt euch frei zu Forken und Pullen. Die Mitglieder der "Organisation" können auch direkt auf das Repository zugreifen und eigene erstellen.
Tim schrieb: > Das Repository > kenne ich nicht, Schau mal in Deinen Einstellungen ganz unten nach, da steht Dein Passwort zum hiesigen SVN-Server. ...
Angehängte Dateien:
-

LED-Circuit.jpg
140 KB
So, ich war fleissig und habe ein Blinky-Testprojekt erstellt, indem ich das Offizielle Beispiel abgewandelt habe. Leider kann ich es Mangels "Bu-Link" noch nicht auf echter Hardware testen, aber vielleicht kann Robert es testen? Ein Project für Keil uvision ist enthalten. Wenn alles funktioniert, sollten die LEDS mit 2 Hz blinken. https://github.com/hack-opter/Examples
Hannes Lux schrieb: > Schau mal in Deinen Einstellungen ganz unten nach, da steht Dein > Passwort zum hiesigen SVN-Server. Danke! Ich bin allerdings schon voll zu git konvertiert :)
Tim (cpldcpu) schrieb: > Ich denke wir müssten wegen des kleinen Flash auf die > "DirectRegisterAccess" Variante zurück fallen. Ist die CMSIS Lib so groß? Bei STM32 läuft die zB auch ohne Probleme auf 16k Flash. Komfortabler wäre CMSIS glaube ich schon, aber wenn es nicht anders geht, wird man sich wohl auch mit Direct Register Access zurechtfinden :) Tim schrieb: > Ich habe das Repository schon mit einigen Daten gefüllt Gefällt mir :)
Manuel Steiner schrieb: > Ist die CMSIS Lib so groß? Bei STM32 läuft die zB auch ohne Probleme auf > 16k Flash. Komfortabler wäre CMSIS glaube ich schon, aber wenn es nicht > anders geht, wird man sich wohl auch mit Direct Register Access > zurechtfinden :) Man kann CMSIS auch noch verkleinern, dann gibt es wahrscheinlich keinen wirklichen Unterschied zum direct register access mehr. Ich habe das mal für den LPC810 gemacht - war aber ein ganz schönes Gefrikel. (https://github.com/microbuilder/LPC810_CodeBase/pull/3) Für Umsteiger von AVR ist DRA vielleicht intuitiver? Ich muss mir das bei Gelegenheit noch einmal anschauen.
Tim schrieb: > Für Umsteiger von AVR ist DRA vielleicht intuitiver? Stimmt, so gesehen ist es vielleicht nicht so schlecht.
Ich habe das Repository noch einmal umbenannt, weil es mir so besser gefiel. Lieber jetzt als später... https://github.com/hackocopter
Hallo, habe den "Frankfurter"-Quadrocopter in dieser Woche erhalten und habe mit dem Copter zwei Probleme: Zuerst schalte ich die Fernbedienung ein, dann den Copter und warte bis die Fernbedienung signalisiert, dass es losgehen kann. Jetzt taucht das erste Problem auf: in den ersten 1 - 2 Minuten werden die Befehle nur mit großer Verzögerung angenommen (1 - 2 Sekunden), danach funktioniert alles einwandfrei. Das zweite Problem ist, der Copter muss nach jedem Einschalten getrimmt werden. Wie kann ich die beiden Probleme abstellen? Herbert
Mach es mal andersrum. Erst Copter anstecken, dann FB an und das Gas auf Vollgas schieben und zurück. Dann sollte es direkt gehen. Das mit dem Trimmen... Ich glaub das musst du allgemein machen. Auch wenn der Akku nachlässt musst du ab und zu nachtrimmen..
Angehängte Dateien:
-

Unbenannt.PNG
49 KB
Wollte gerade das Blinkprogramm ausprobieren, doch mit dem funktioniert das Build auch irgendwie nicht. Keil findet ein File nicht. Es ist aber definitiv da. Verstehe das nicht.
Robert Knipp schrieb: > Es ist aber definitiv da Dann liegt es an einem Platz, wo es der Keil nicht sucht.
Und es blinkt.... Georg G. schrieb: > Robert Knipp schrieb: >> Es ist aber definitiv da > > Dann liegt es an einem Platz, wo es der Keil nicht sucht. GitHub hatte das Projekt irgendwie nicht richtig synchronisiert.
Hannes Lux schrieb: > Torsten S. schrieb: >> Gut zu wissen Hannes. Dann sind wir ja beide Co-Piloten ;) > > Nicht mehr, ein guter Freund (75 km südlich) hat mir das Ding > abgeschwatzt. Ich wollte damit eigentlich nur mal testen, ob ich damit > umgehen kann und ob sich später dann die Anschaffung einer FlyCam lohnt. > Ich habe mich aber dafür entschieden, bei der auf Gartenbahngleisen > fahrenden Train-Cam zu bleiben und die Helis Helis sein zu lassen... > http://www.youtube.com/channel/UCEbswoJIlUy-rokhdFtW6xw/videos > Man kann nicht überall mitmischen... Ja man kann nicht auf mehreren Hochzeiten tanzen. Es ist besser sich für eine Sache zu entscheiden und die dann richtig zu machen. Eine Flycam habe ich mir auch angeschafft, ein User in diesem Thread hatte diese empfohlen [1]. Leider kann der kleine Hupsi diese nicht heben weil zu schwer. Trotzdem kein Fehlkauf - die Qualität ist beeindruckend. Man sieht die Grashalme auf dem Rasen hin-und-her wippen. Das unscheinbare Teil stellt einen kürzlich erworbenen Camcorder in die Ecke. [1] EbayNr.: 221259368601
Es blinkt oha :D das ist mal sehr schön was muss ich mir an sachen bestellen um die firmware zu flashen ? Oder basteln zu können ? Was kostet das ca.
Turbonator schrieb: > Es blinkt oha :D das ist mal sehr schön was muss ich mir an sachen > bestellen um die firmware zu flashen ? Oder basteln zu können ? Was > kostet das ca. Also wenn man ein wenig in dem Thread hier liest, dann kommt man auf Folgendes: - Mit einem Nulink Programmer funktioniert es 100% (etwa 35€) - Tim wartet auf den Nachbau (Bulink, ca 11 Dolla, wenn ich es richtig im Kopf habe), und wird hoffentlich berichten sobald der da ist - Vermutlich funktioniert es auch mit einem SWD (wie etwa auf STM32 Discovery Boards zu finden, ab 10€ erhältlich), sobald der MCU einmal unlocked und erased ist. Hierzu werden wir noch analysieren, ob sich dieser Vorgang auch ohne Nulink, etwa mit dem SWD von Discovery Boards durchführen lässt. Dazu muss aber erst mal herausgefunden werden, wass wirklich beim unlocken und erasen mit dem ICP Tool und Nulink passiert.
Ok cool danke bei dem ganzen hin und her will ich auf nummer sicher gehen aber das orgi teil ist ja auch günstig damit ich nichts falsch mach wäre ein link auf ebay cool wenn es nicht zuviel verlangt ist . Und mit der Software von nulink kann man in der free version bis 16kb was bei dem reicht oder ist das völlig falsch ? ... welche Programm sprache ist angebracht?
Das ICP Tool von Nuvoton brauchst du zur zum Unlocken und Löschen des MCU. Danach kannst du zB mit Keil neue Firmware schreiben. Diese hat in der freien Version ein Limit von 32k. Programmiersprache ist C / C++. Das original Nuvoton Nulink Teil gibts nur bei Distributoren, zB. Digikey: http://www.digikey.com/product-search/en?x=0&y=0&lang=en&site=us&KeyWords=nulink Es ist auch sehr ratsam den Thread zu verfolgen, es wurden schon sehr viele hilfreiche Informationen zusammengetragen. Wir sind gerade dabei, dass auch alles in Github zu sammeln und eine Wikipage zu erstellen, wie ein paar Posts weiter oben zu lesen ist.
Ja das stimmt, ok danke trotzdem. Jetzt ne andere frage . Ich als anfänger hab mir gedacht erstmal da wo die motoren dransind einen RGBW stripe dranzumachen und das zum leuchten zu bringen ein bekannter von mir in C programieren oder ist das kompletter schwachsinn ?
Turbonator schrieb: > Ich als anfänger hab mir gedacht erstmal da wo > die motoren dransind einen RGBW stripe dranzumachen und das zum leuchten > zu bringen ein bekannter von mir in C programieren oder ist das > kompletter schwachsinn ? Ist es schon so spät, dass ich die Frage (zumindest den 2. teil mit bekannteer und C programmieren) nicht versteh, oder fehlt da noch wo ein Teil in der Frage? Warum willst du statt den Motoren LEDs anbringen? Man kann da ja nicht so viel kaputt machen. Zur Not die Propeller abnehmen, damit der Quad nicht unkontrolliert irgend etwas macht oder mal einfach mit den LEDs die verbaut sind anfangen zu spielen (mal PWM drauf los lassen und dimmen etc).
Also ich meinte das als übung das er mich unterstützt mein bekannter
Ich weiß nicht ob dein Bekannter in Sachen ARM bzw MCU Programmierung Erfahrung hat. Falls ja, klar könnt ihr miteinander da rum probieren, wieso auch nicht? Allgemein sollte man sich aber wohl mal mit C Programmierung im Generellen auseinandersetzen. Danach mit der ARM Plattform und den Konzepten von MCU Programmierung. Da wird sehr viel eventgesteuert programmiert usw. Falls du hier gleich versuchst, ohne irgendwelche Vorkenntnisse mit dem Quad zu experimentiern könnte das eventuell schnell zu Frust anstatt zu Spaß werden. Für Anfänger ist es sicher nicht trivial, mal eben PWM oder ähnliches zur programmieren. Man sollte da eventuell mit einfachen Ausgängen anfangen, die mal high bzw low setzen. Das Ganze ist meine Meinung.
> zu bringen ein bekannter von mir kann in C programieren oder ist das > kompletter schwachsinn ? So ist es richtig . Hast recht ich sollte tv gucken oder schlafen . Pwm ist mir sehr wichtig , ne555 kann das auch aber so mein ich das nicht . Eher mit drei phasen zb brushless motor aber mit mikrocontrollern das hat aber nichts mit dem hier zu tun . Es geht mehr um das programmieren also um den copter .
Robert Knipp schrieb: > Wollte gerade das Blinkprogramm ausprobieren, doch mit dem funktioniert > das Build auch irgendwie nicht. > Keil findet ein File nicht. Es ist aber definitiv da. Verstehe das > nicht. Das Definieren von Pfaden in Keil ist ziemlich verwirrend. Ich dachte schon, ich hätte da etwas falsch gemacht. Aber das Compilieren funktioniert bei mir auch von einem anderen Laufwerk. Hast Du denn das ganze Archiv heruntergeladen und entpackt? Sind die Pfade die gleiche wie vorher? >Und es blinkt.... Ah, dann vergiss das Obige :) Super! dann funktioniert ja alles. >GitHub hatte das Projekt irgendwie nicht richtig synchronisiert. Inwiefern?
Tim schrieb: >>GitHub hatte das Projekt irgendwie nicht richtig synchronisiert. > > Inwiefern? Habe mir die GitHub Anwendung für Windows installiert und darüber das Projekt auf meinen Rechner geklont. Das wollte erst nicht so richtig. Zwischenzeitlich war aber auch der Samba auf meinem NAS, auf dem GitHub das Projekt klonen sollte, abgestürzt und dann gabs natürlich Fehler. Danach funktionierte der Sync auch nicht mehr. Hatte es dann aus der Anwendung wieder rausgelöscht und es nochmal klonen lassen. Dann funktionierte es.
Wollte jetzt mal mit dem LA an das Teil ran. Wenn der LA dran hängt mag Keil aber nicht mehr flashen. Ich habe den MiniLA Version MockUp und habe die ersten drei Kanäle an den Datenleitungen hängen und Masse angeschlossen. Ich greife die Signale direkt am NuLink ab. Den Trigger habe ich auf steigende Flanke am Clocksignal eingestellt. Der LA wartet auch brav auf den Trigger. Ich habe bisher noch nie mit einem LA gearbeitet. Mache ich da was falsch?
Durch weglassen einer Leitung nach der anedren kannst du probieren, welcher Anschluss das Problem verursacht. Eventuell ist die Masse das Problem.
Ich hatte doch etwas nicht richtig angreschlossen. Nun funktionierts. Ich habe allerdings Probleme beim Mitschneiden der Programmierung über ICP. Sobald ICP Verbindung mit dem Controller hat kommuniziert es anscheinend ständig mit dem Controller. Sobald ich den LA starte löst der Trigger sofort aus, der LA zeichnet etwa 20us auf, überträgt zum PC und geht dann wieder auf Standby. Habt Ihr nen Tip auf was ich da triggern muss? Habe übrigens die Time Analysis FW drauf. Das sollte doch richtig sein, oder? Jetzt muss ich leider erstmal weg. Teste das dann eventuell heute abend nochmal.
Die Chinamänner haben gemerkt das Dinger beliebt sind und haben die Preise angezogen! Keiner mehr unter 25€. Es geht auf Weihnachten zu.
Ich habe es jetzt mal hinbekommen beim erase Vorgang etwas aufzuzeichnen. Bin mir da allerdings nicht sicher ob es der komplette Vorgang ist. Auf der data Leitung passiert so gut wie nichts und nicht immer exakt das selbe. Habe drei erase Vorgänge gesüpeichert. Vielleicht kann ja jemand etwas damit anfangen.
Robert Knipp schrieb: > Ich habe es jetzt mal hinbekommen beim erase Vorgang etwas > aufzuzeichnen. Bin mir da allerdings nicht sicher ob es der komplette > Vorgang ist. Auf der data Leitung passiert so gut wie nichts und nicht > immer exakt das selbe. Habe drei erase Vorgänge gesüpeichert. Vielleicht > kann ja jemand etwas damit anfangen. Was sind das für Dateien? Wie kann man sich die anschauen?
Broo schrieb: > Robert Knipp schrieb: > >> Ich habe es jetzt mal hinbekommen beim erase Vorgang etwas >> aufzuzeichnen. Bin mir da allerdings nicht sicher ob es der komplette >> Vorgang ist. Auf der data Leitung passiert so gut wie nichts und nicht >> immer exakt das selbe. Habe drei erase Vorgänge gesüpeichert. Vielleicht >> kann ja jemand etwas damit anfangen. > > Was sind das für Dateien? Wie kann man sich die anschauen? Die wurden mit der MiniLA Software gespeichert. Anderes Format kann die leider nicht. Die SW gibts im Artikel. http://www.mikrocontroller.net/articles/Minila_Version_MockUp
Habe gerade gesehen es geht auch Export in Bin+Ini und VCD. Vielleicht kann man das ja mit nem anderen Programm öffnen. Kenne mich da noch nicht so aus.
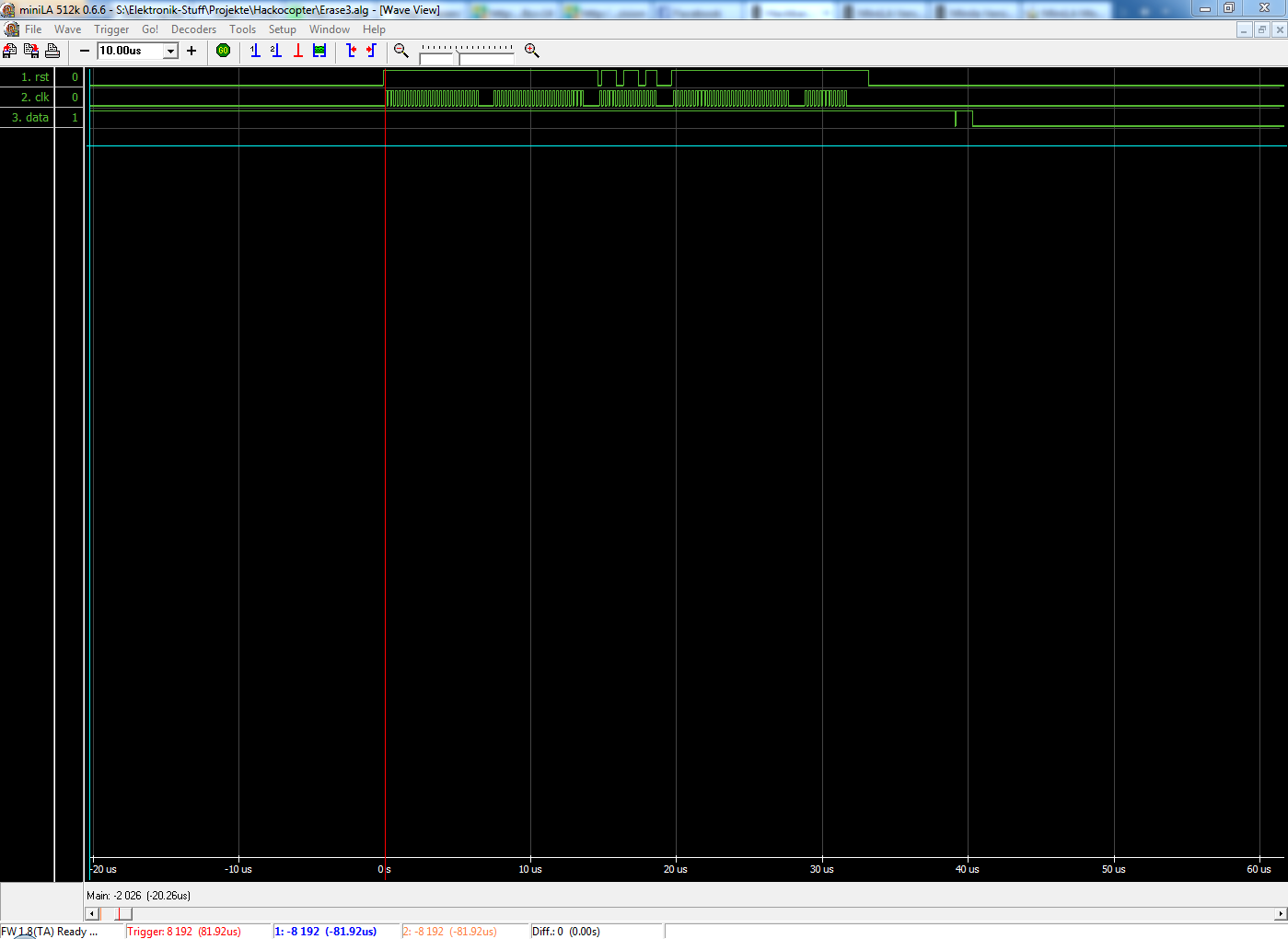
Robert Knipp schrieb: > Ich habe es jetzt mal hinbekommen beim erase Vorgang etwas > aufzuzeichnen. Bin mir da allerdings nicht sicher ob es der komplette > Vorgang ist. Auf der data Leitung passiert so gut wie nichts und nicht > immer exakt das selbe. Habe drei erase Vorgänge gesüpeichert. Vielleicht > kann ja jemand etwas damit anfangen. Am interessantesten wäre wahrscheinlich der erase Vorgang mit locktem MCU. Eventuell kann man den ja nochmal locken und analysieren. Mein Quadcopter lässt leider immer noch auf sich warten, bis ich mal was machen kann. Aber Danke natürlich an jede Mithilfe und deine Mühe. Vielleicht lässt sich damit ja auch schon was anfangen. Nicht dass jetz wer glaubt, ich würde das nicht Wert schätzen oder so :)
Manuel Steiner schrieb: > Am interessantesten wäre wahrscheinlich der erase Vorgang mit locktem > MCU. Eventuell kann man den ja nochmal locken und analysieren. Genau so habe ich es ja gemacht. Erst gelocked und dann wieder erased.
Robert Knipp schrieb: > Manuel Steiner schrieb: >> Am interessantesten wäre wahrscheinlich der erase Vorgang mit locktem >> MCU. Eventuell kann man den ja nochmal locken und analysieren. > > Genau so habe ich es ja gemacht. Erst gelocked und dann wieder erased. Ah ok alles klar, sorry für die Verwirrung.
Broo schrieb: > Robert Knipp schrieb: > >> Näher gezoomt bekomme ich nicht alles drauf.... > > Sieht doch brauchbar aus. Ist es nicht etwas wenig? Mehr zeichnet er aber auch nicht auf. Bricht die Aufzeichnung von selbst ab.
Hallo zusammen, ich habe mir das Board mit einem J-link Edu unter Keil angeschaut. Löschen oder Zugriff auf geschützte Register funktioniert nicht, also auch keine Neu-Programmierung. Allerdings ist die ISP-Routine im Datenblatt vom Mini beschrieben (S. 130ff). Der Schlüssel liegt wohl in der Startsequenz: An Adresse 0x50000100 die Werte 0x59, 0x16, 0x88 schreiben. Anschliessend sind die geschützten Register (nicht Flash) beschreibbar. Das funktioniert auch, das Bit ändert seinen Wert: Adresse 0x50000100 Bit 0 (1=unlocked, 0=locked). Wie es dann mit der ISP-Routine weitergeht ist kompliziert. Vielleicht hilft der Ansatz aber bei der Analyse weiter...
Meiner ist gerade gekommen. Ausgepackt, Akku geladen und den Kram mal laufen lassen. Es ging vom Schreibtisch vehement an die Decke und von da in die Küche. Er ist auf der Nase gelandet und hat mir ordentlich auf die Finger gehauen. Nettes Bieldeug :-)))
Am 16.10, ca. 3 Wochen. Ich habe ihn jetzt einmal hinter dem Schrank wiedergefunden, es sammelt Wollmäuse und zickt etwas :-)))) Vielleicht mal die Katze jagen ...
Mein Ersatz von tonsee_mall kam heute an, mit Akku. Versand war 16.10.
Also ich wohne in nrw Essen und meiner wurde auch am 16.10 abgeschickt . Auch von tonsee mall ,dann kommt der wohl morgen .
Oliver Stellebaum schrieb: > Die Chinamänner haben gemerkt das Dinger beliebt sind und haben die > Preise angezogen! Keiner mehr unter 25€. > Es geht auf Weihnachten zu. Habe hier gerade meinen Drittcopter gekauft: http://www.ebay.de/itm/151110512069?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649 22.37EUR
Robert Knipp schrieb: > Ich habe es jetzt mal hinbekommen beim erase Vorgang etwas > aufzuzeichnen. Bin mir da allerdings nicht sicher ob es der komplette > Vorgang ist. Auf der data Leitung passiert so gut wie nichts und nicht > immer exakt das selbe. Habe drei erase Vorgänge gesüpeichert. Vielleicht > kann ja jemand etwas damit anfangen. Hallo Robert, vielen Dank! Das sieht sehr interessant aus. Die Sequenz sieht wirklich merkwürdig aus. Reset während CLK getoggled wird? Eigentlich macht das gar keinen sinn, aber vielleicht ist das ja auch das Geheimnis. Ich bin immer noch auf der Suche nach eine guten Referenz für das SWD-Protokoll. Kennt da zufällig jemand etwas?
Tim schrieb: > Oliver Stellebaum schrieb: >> Die Chinamänner haben gemerkt das Dinger beliebt sind und haben die >> Preise angezogen! Keiner mehr unter 25€. >> Es geht auf Weihnachten zu. > > Habe hier gerade meinen Drittcopter gekauft: > > http://www.ebay.de/itm/151110512069?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649 > > 22.37EUR Den hättest auch aus DE haben können: http://www.ebay.de/itm/171097513221?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1423.l2649 Grüße
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.