Auch ich kann natürlich zu einer Bestellung nicht "Nein" sagen... bin zwar noch mit "einfliegen" beschäftigt... aber egal... wann, wo, was ??? bin dabei :O)
Hab hier schon einen geschrottet, macht aber gut Laune. Demzufolge würde ich mich für mind. 5 Stück zu diesem Preis interessieren :) Viele Grüße, guten Rutsch und ein gesundes neues Jahr @all
Angehängte Dateien:
-

LowBatteryWarning.png
1,2 KB
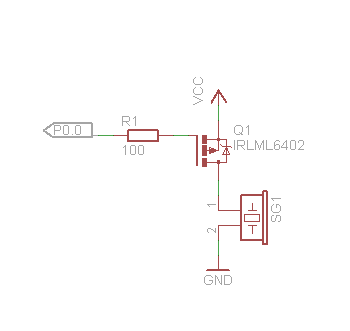
Hallo Zusammen, brauche geballtes Wissen für einen Hardwarehack! Weil die Batteriewarnung durch die nach vorne gerichtete LEDs und bei Tageslicht immer nur sehr schlecht wargenommen werden kann, habe ich mir etwas besser überlegt: Anstatt oder zusätlich zu den LEDs noch einen kleinen Buzzer mit an den Port P0.0 zu hängen. Dieser mit einem P-Kanal oder PNP Transistor angesteuert wird (siehe Anhang). Wenn nun die LEDs anfangen zu Blinken ertönt auch gleichzeitig ein akustisches Signal. Nun bin ich auf der Suche nach einem passen Buzzer. Bisher habe ich nur kleine SMD Buzzer ohne interene Ansteuerung gefunden: z.B.: KSSG13J12-N oder PKLCS1212E4001-R1 Kennt jemand einen SMD Buzzer < 10x10x3mm mit interner Ansteuerung? Alternativ eine möglichst leichte externe Ansteuerung? Was ich bisher gefunden habe wäre z.b. dieser hier: LTC1799 + Transistor. THX
B. G. schrieb: > Wenn nun die LEDs anfangen zu Blinken ertönt auch gleichzeitig ein > akustisches Signal. Interessante Idee. Die LEDs auf der Vorderseite kann man wirklich schlecht erkennen. Eigentlich könnte man doch auch einfach eine LED auf die Rückseite verlegen? Auf der Platine sind sogar ungestückte Lötpads dafür vorgesehen. B. G. schrieb: > Kennt jemand einen SMD Buzzer < 10x10x3mm mit interner Ansteuerung? Leider nein.
Angehängte Dateien:
-

lipo-charger.jpg
55 KB
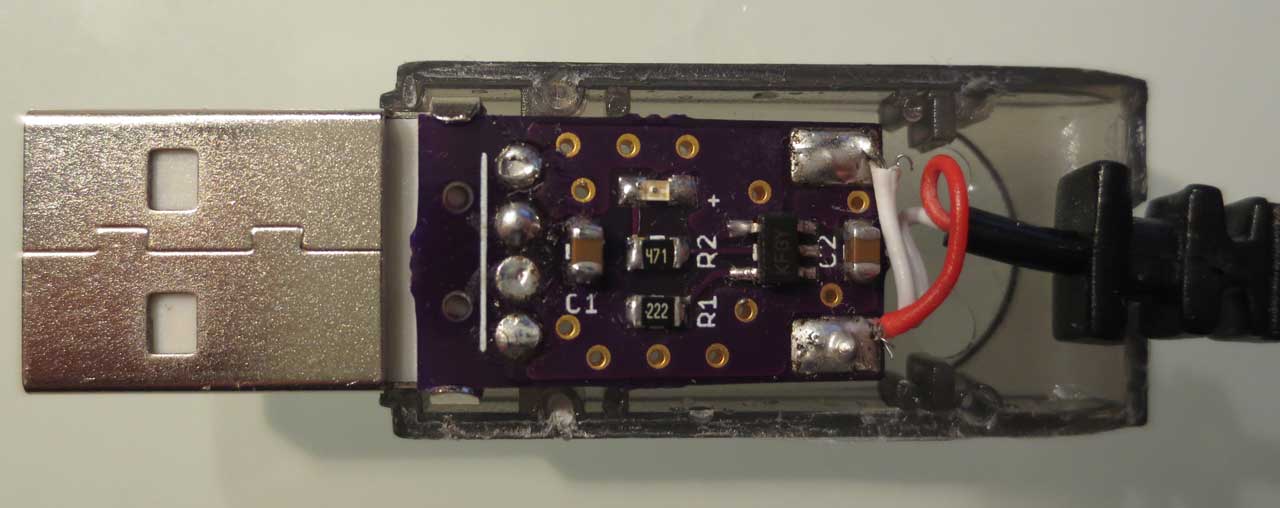
Ich habe heute endlich den LiPO-Charge zusammengebaut. Die Teile sind erst kurz vor Weihnachten angekommen. Dabei ist mir leider aufgefallen, dass ich die Polarität des USB Steckers vertauscht habe. (Oder war das Absicht?! Mir fällt kein Grund ein). Daher muss man den USB-Stecker auf die Unterseite montieren. Es passt aber trotzdem noch alles in das Originalgehäuse - siehe Bild. Es wird gerade der erste Akku geladen. So weit scheint alles zu funktionieren.
Youtube-Video "A Swarm of Nano Quadrotors" Oliver Stellebaum schrieb: > Ist sowas utopisch oder kann man sowas mit wenig hardwareaufwand > realisieren? Nur mit Intertalsensoren ist es bestimmt schwierig, eine so genaue Positionskontrolle hinzubekommen. In dem Video wird ja anscheinen auch eine Positionsbestimmung über Kameras genutzt.
Zur Sammelbestellung: Super, dass es doch schon so viele Interessenten gibt. Mich haben auch einige der Händler noch einmal kontaktiert. Bei mir sieht es im Moment Zeitlich nicht ideal aus. Ich würde daher eher die Zeit nach Chinese New Year für eine Sammelbestellung anpeilen. (Ende Februar oder März).
Angehängte Dateien:
-

brain_probe_1.jpg
110 KB -

brain_probe_2.jpg
57 KB -

brain_probe_3.jpg
52 KB -

brain_probe_4.jpg
26 KB



Ich habe bei meinem Hack-O-Copter jetzt den SWD-Port und den seriellen Port nach draussen geführt. Dazu habe ich einfach Stiftleisten mit Sekundenkleber an das Gehäuse geklebt. Es gibt zwischen den Schalenhäften einen Bereich mit einer Lücke, durch die sich dünne Leitungen legen lassen. Eine ziemliche Murkslösung, dafür aber einfach umsetzbar - und es funktioniert.
Georg G. schrieb: > Ein Link für viel Information zum Thema Quadcopter Software und Theorie > (meist AVR, aber als Anregung dennoch gut): > https://github.com/googl1/therminator Danke für den Link. Das sieht sehr interessant aus.
B. G. schrieb: > Nun bin ich auf der Suche nach einem passen Buzzer. Bisher habe ich nur > kleine SMD Buzzer ohne interene Ansteuerung gefunden: > > z.B.: KSSG13J12-N oder PKLCS1212E4001-R1 > > Kennt jemand einen SMD Buzzer < 10x10x3mm mit interner Ansteuerung? Das ist eher unüblich, da die kleinen Teile meist auf Boards verlötet werden und es dort kein Problem ist die Ansteuerung flexibel selbst zu gestalten. Die Dinger mit integrierter Ansteuerung sind eher die, die man mit Kabeln irgendwo extern dranmacht oder die kleinen Sirenen bei denen es auf Lautstärke ankommt. > Alternativ eine möglichst leichte externe Ansteuerung? > > Was ich bisher gefunden habe wäre z.b. dieser hier: LTC1799 + > Transistor. So genau muß die Frequenz ja nicht sein, da brauchst Du keine 2,39 EUR für so ein Teil ausgeben. Einfach ein 74LVC2G14 als astabilen Multivibrator beschalten. Alternativ, aber natürlich nicht so schön klein: 74AC14. Die Frequenz kannst Du dann über R und C einstellen. Der kann von sich aus 24mA treiben, wenn es nicht zu sehr auf Lautstärke ankommt brauchst Du gar keinen extra Transistor mehr. Oder natürlich der allseits beliebte 555, der sollte den Buzzer auch treiben können.
Kleines Update zum LiPO-Charger: Ich habe mit ihm einem Turnigy-Akku, wie oben vorgestellt Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter", geladen. Bei 2C Ladestrom wurde das Ladeende korrekt erkannt und der Akku hat sich nicht aufgebläht o.Ä., was bei dem mitgelieferten Ladegerät leider passiert.
Danke für die Antworten... Sagen wir mal so, ich bin einfach auf der Suche nach einer leichteren und kompakteren Lösung als so ein Monster: http://such002.reichelt.de/index.html?ACTION=3;ARTICLE=35924;SEARCH=SUMMER%20CPM%20121 Ein 74LVC2G14 anstatt des LTC1799 ist eine gute Idee, wobei der Bauteilaufwand wieder steigt. Der 555 wäre dann schon ein wenig groß. Eine kleine PCB mit 0,8mm Stärke wird dann fast unumgänglich. Hätte jemand Interesse an einer entsprechenden Lösung? Hat schon jemand die "Rücklichter" Nachgerüstet? Also passende LEDs sollte ich noch in der Bastelkiste haben, nur ob ich 0805 Widerstände auf die Footprints für die Vorwiderstände bekomme^^ Außerdem habe ich am Wochenende meinen 808 #16 clone zerlegt und unter den Kopter gehängt. Leider fällt beim Fliegen die Akkuspannung zu sehr und die Cam schaltet sich gleich wieder ab. Also nur mit eigenständigem Akku möglich. Kann bei Bedarf noch ein Paar Bilder vom Umbau liefern... Gerd E. schrieb: > B. G. schrieb: >> Nun bin ich auf der Suche nach einem passen Buzzer. Bisher habe ich nur >> kleine SMD Buzzer ohne interene Ansteuerung gefunden: >> >> z.B.: KSSG13J12-N oder PKLCS1212E4001-R1 >> >> Kennt jemand einen SMD Buzzer < 10x10x3mm mit interner Ansteuerung? > > Das ist eher unüblich, da die kleinen Teile meist auf Boards verlötet > werden und es dort kein Problem ist die Ansteuerung flexibel selbst zu > gestalten. Die Dinger mit integrierter Ansteuerung sind eher die, die > man mit Kabeln irgendwo extern dranmacht oder die kleinen Sirenen bei > denen es auf Lautstärke ankommt. > >> Alternativ eine möglichst leichte externe Ansteuerung? >> >> Was ich bisher gefunden habe wäre z.b. dieser hier: LTC1799 + >> Transistor. > > So genau muß die Frequenz ja nicht sein, da brauchst Du keine 2,39 EUR > für so ein Teil ausgeben. > > Einfach ein 74LVC2G14 als astabilen Multivibrator beschalten. > Alternativ, aber natürlich nicht so schön klein: 74AC14. > > Die Frequenz kannst Du dann über R und C einstellen. Der kann von sich > aus 24mA treiben, wenn es nicht zu sehr auf Lautstärke ankommt brauchst > Du gar keinen extra Transistor mehr. > > Oder natürlich der allseits beliebte 555, der sollte den Buzzer auch > treiben können.
Angehängte Dateien:
-

pcb-rear.jpg
160 KB -

pcb-front.jpg
170 KB
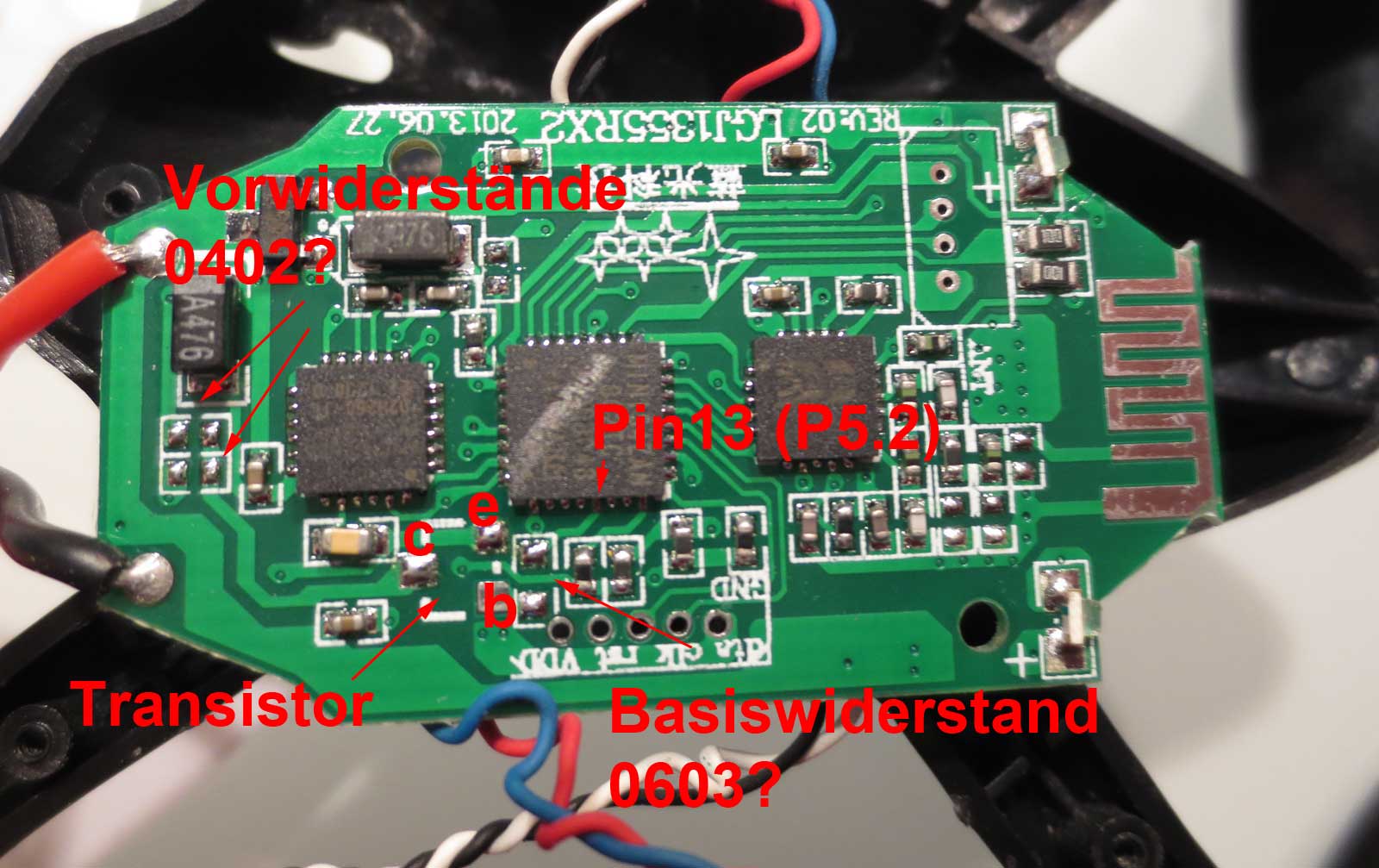
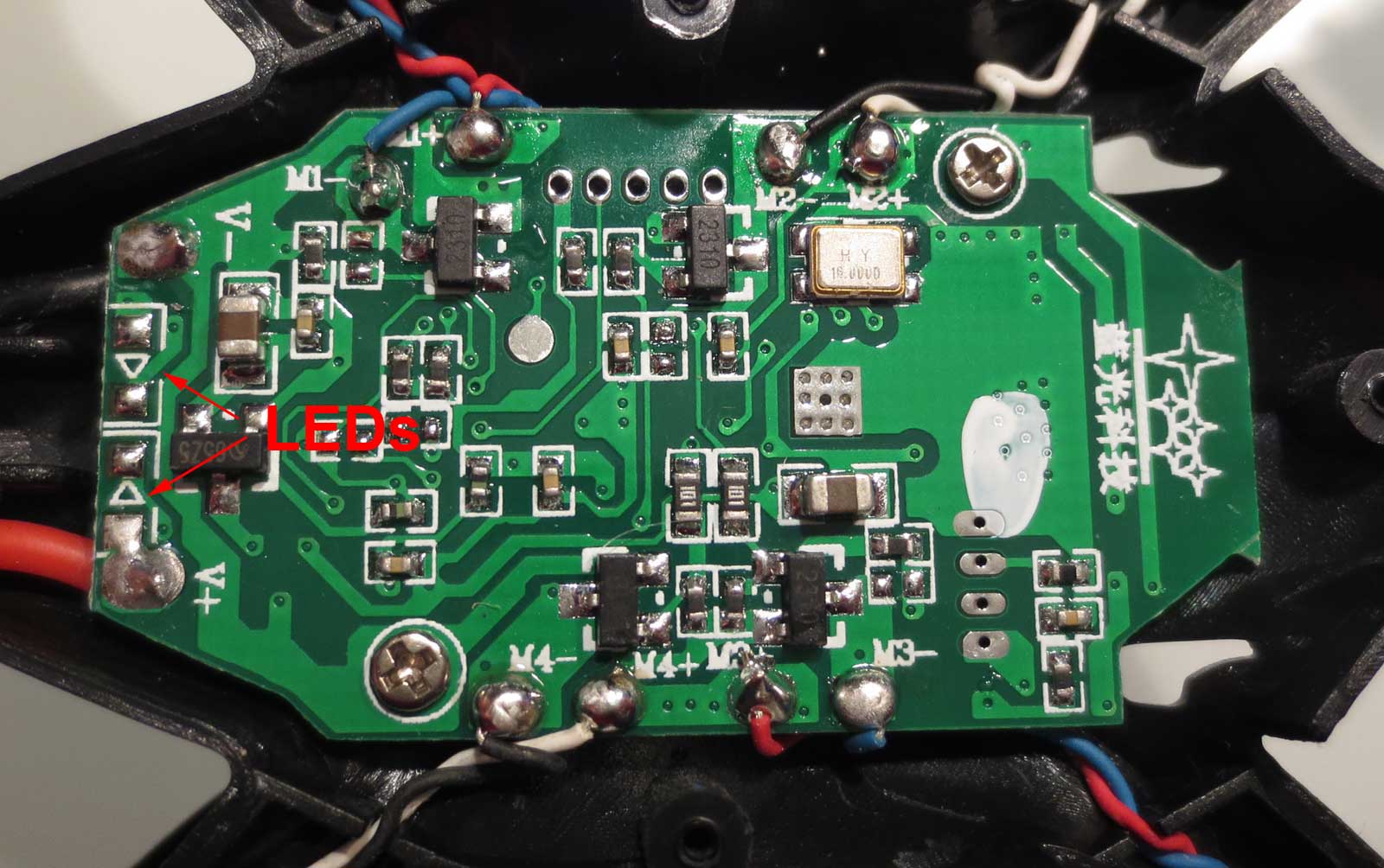
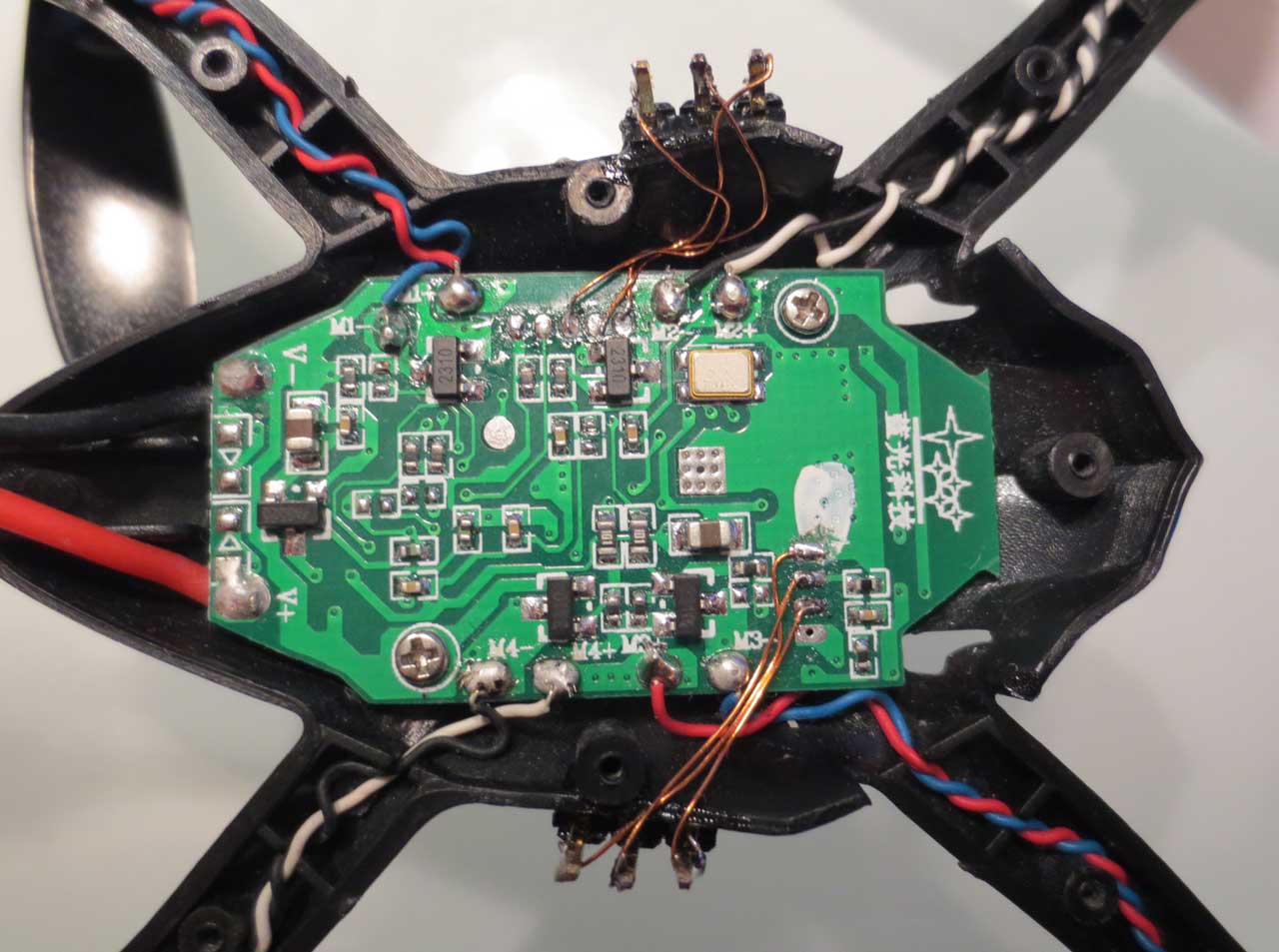
B. G. schrieb: > Hat schon jemand die "Rücklichter" Nachgerüstet? Also passende LEDs > sollte ich noch in der Bastelkiste haben, nur ob ich 0805 Widerstände > auf die Footprints für die Vorwiderstände bekomme^^ Ich habe es noch nicht probiert, aber man könnte prinzipiell die noch fehlenden Bauteile bestücken. Dann kann man die LEDs über einen Transistor mit P5.2 ansteuern. Alternativ kann man die LEDs natürlich auch parallel zu den "Rücklichtern" schalten.
@cpldcpu Danke nochmals für die Mühe das Bild neu zu beschriften. Hattes es hier ja auch schon mal beschreiben: Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter" Die LEDs sind 0603, die Widerstände sind 0402. Hast du mal ein Oszi an den Pin 13 gehalten und gemessen ob dieser überhaupt geschalten wird? Ansonsten habe ich morgen ein wenig Zeit, dann kann ich das an meinem mal tun.
B. G. schrieb: > Hast du mal ein Oszi an den Pin 13 gehalten und gemessen ob dieser > überhaupt geschalten wird? > > Ansonsten habe ich morgen ein wenig Zeit, dann kann ich das an meinem > mal tun. Habe ich bisher noch nicht gemacht. Wenn es auch mit der bestehenden Firmware funktionieren soll, wäre es wohl am sichersten, Die LEDs mit Pin 26 zu verbinden.
Angehängte Dateien:

Oh Tannenbaum Ich habe einen pnp an dem - der blauen led gemacht die wießen led mit 100ohm an den Akku, die roten und gelben blinken wenn der akku leer ist und die weißen leuchten dauerhaft
Turbonator schrieb: > Oh Tannenbaum > Ich habe einen pnp an dem - der blauen led gemacht die wießen led mit > 100ohm an den Akku, die roten und gelben blinken wenn der akku leer ist > und die weißen leuchten dauerhaft Gratuliere zum Projekt und zur Orthografie.
Turbonator schrieb: > 100ohm an den Akku, die roten und gelben blinken wenn der akku leer ist > und die weißen leuchten dauerhaft Schick! Gefällt mir. Wie hast Du das ganze verkabelt?
Angehängte Dateien:
-

20140115_200529_1_.jpg
920 KB -

20140115_201321_1_.jpg
1 MB -

20140115_200320_1_.jpg
1 MB
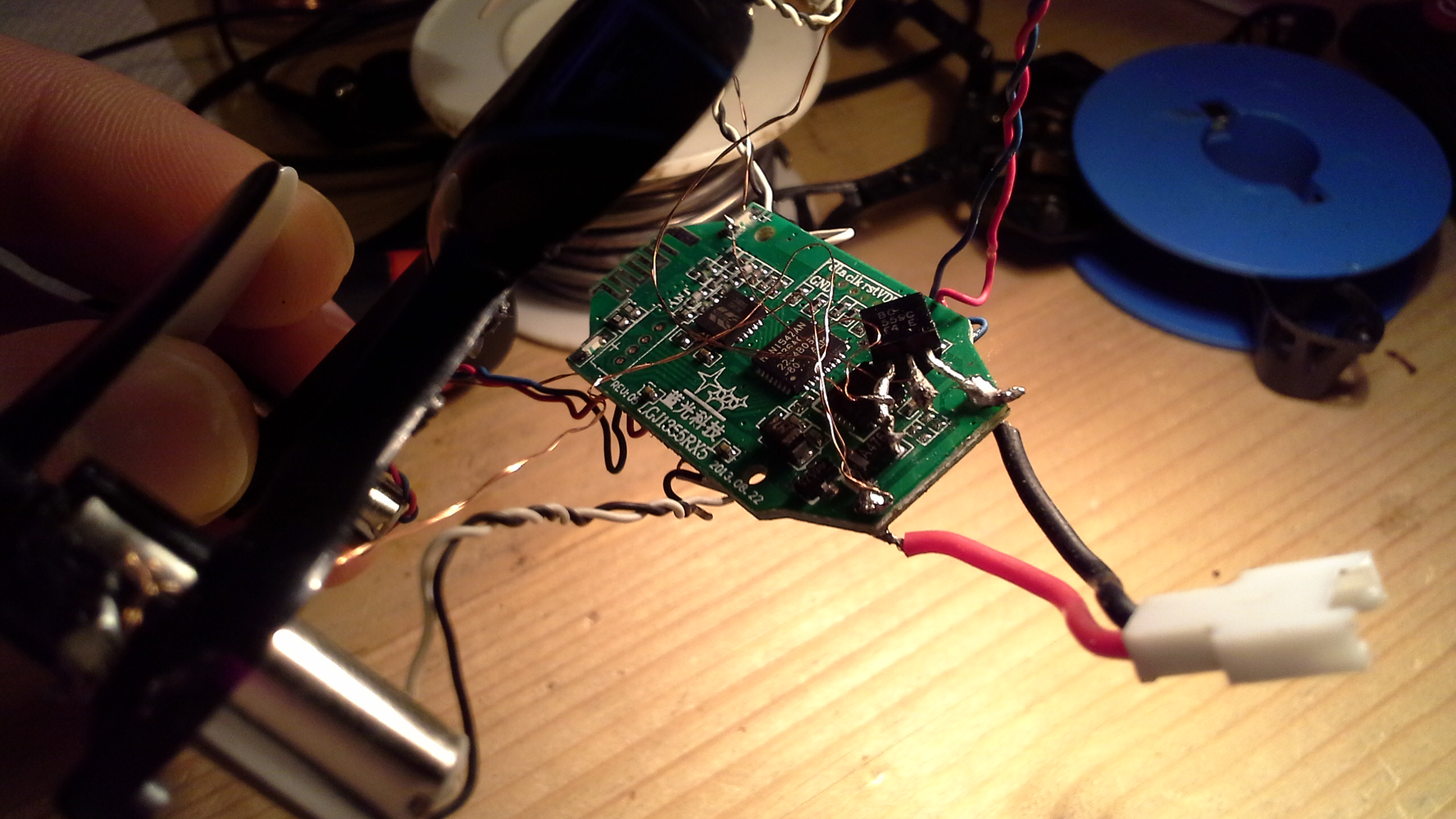
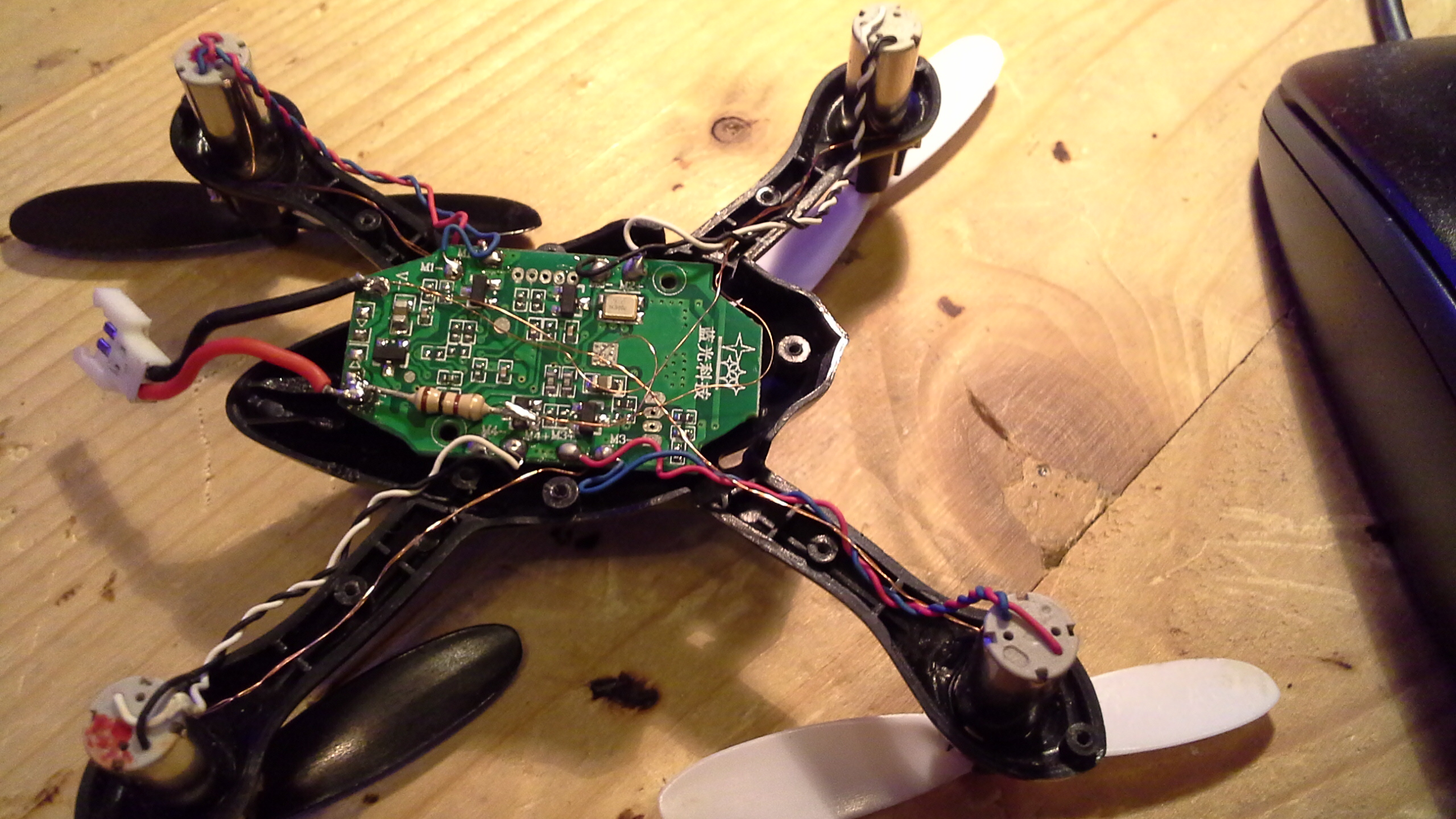

Mit Kupferlackdraht ,durch die schlitze der Motorhalterung die obere Seite an der auch die Platine hängt. Ich hatte leider keine SMD Widerstände und Transistoren das sieht komisch aus ^^ bc559c
Angriff der Monsterbauteile! Das sieht schon ziemlich extrem aus :)
Angehängte Dateien:
-

20140115_203114_1_.jpg
830 KB

Bitte nicht aufregen wegen den unsauberen löt arbeiten das ist zur zeit mein Lötkolben
Sieht richtig gut aus. Eventuelle mach ich das bei meinem auch. Tim schrieb: > Angriff der Monsterbauteile! Das sieht schon ziemlich extrem aus :) Und der riesen Bilder. Turbonator schrieb: > Bitte nicht aufregen wegen den unsauberen löt arbeiten das ist zur zeit > mein Lötkolben Falsches Bild erwischt? Ich dachte du willst ein Bild von deinem Lötkolben zeigen =).
haha Das ist schlecht mit den großen Bildern und war auch nicht meine Absicht wieso sind die Bilder kleiner wenn ich die direkt vom Handy hochlade und so groß wenn ich das Handy am pc und mit dem pc hochlade ?
Turbonator schrieb: > Passiert hier nichts mehr ? Nö, fliegt doch super :) Aber jetzt wird es etwas zu kalt, da frieren mir immer die Finger an der Funke fest :-(
Ja ist schon etwas frostig! Wie ist das mit den akkus besser nach dem gebrauch, direkt laden oder kann ich die nach gebrauch ruig 1-3 wochen wegpacken ?
Marius S. schrieb: > Aber jetzt wird es etwas zu kalt, da frieren mir immer die Finger an der > Funke fest :-( Dann ist ja eigentlich mehr Zeit um das Ding auf dem Seziertisch zu analysieren und rauszufinden, wie man es neu programmieren kann.
Oliver Stellebaum schrieb: > Dann ist ja eigentlich mehr Zeit um das Ding auf dem Seziertisch zu > analysieren und rauszufinden, wie man es neu programmieren kann. Funktioniert doch schon? Fehlt nur noch vernünftiger Source Code :P
Source code gibt es schon, und zwar Bradwii: https://github.com/bradquick/bradwii Davon gibt es auch bereits einen Cortex-Port https://github.com/trollcop/bradwii Ich habe auch schon einmal versuchsweise überflüssige Features herausgeworfen und den Source damit auf unter 16kb bringen können. Es muss nur die Fernbedienung und die PWM-Ansteuerung neu programmiert werden. Mein Plan war bisher, die Dokumentation etwas aufzuräumen und eine englische Anleitung zum flashen zu erstellen, damit sich vielleicht von den Bradwii-Leuten auch jemand für das Projekt gewinnen lässt: http://www.rcgroups.com/forums/showthread.php?t=1922403 Bei mir hat im Moment leider noch ein anderes Projekt vorrang und es sieht mit der Zeit nicht mehr so doll aus. Ich arbeite aber langsam eins nach dem anderen ab.
Basierend auf dem Thread hab ich mir auch ein Exemplar gekauft mit der Idee ihn zu erweitern. Aber bis dahin, was tut eigentlich der "Turning Button"? Das versprochene Manual fehlte in meiner Packung leider und im Netz finde ich es auch nicht. Hinter die Funktion des "Speed Button" bin ich selbst gekommen.
Fleig mal 4m übern Boden und schwebe still... Dann Drück den Turning Button und schieb den linken Stick in eine beliebige Richtung(vorne, hinten, links,rechts) und schau was passiert...
Hallo Leute, ich wollte mich an einem Empfänger für die Fernbedienung versuchen und nach viel studieren hab ich inzwischen gefunden, dass das BIND-Paket wohl auf Kanal 8 übertragen wird. Zumindest initialisiert die Deviation Firmware den RF_CH auf 8. Jetzt kommts aber. Ich erhalte vielleicht alle paar Minuten ein Paket aber immer mit einer anderen TX_ID Weiß vielleicht jemand woran das liegen kann? Probehalber hab ich das mit dem Arduino probiert.
1 | ...
|
2 | uint8_t data[16]; |
3 | ...
|
4 | if(Mirf.dataReady()) |
5 | {
|
6 | Serial.println(F("\r\n#############################")); |
7 | Serial.println(F("## Packet received ##")); |
8 | Serial.println(F("#############################")); |
9 | |
10 | Mirf.getData(data); |
11 | Serial.println(F("Analysing data")); |
12 | |
13 | if(data[14] == 0xc0) |
14 | {
|
15 | Serial.println(F("Bind packet received")); |
16 | |
17 | |
18 | Serial.print(F("Adress is: ")); |
19 | Serial.print(data[7], HEX); |
20 | Serial.print(data[8], HEX); |
21 | Serial.print(data[9], HEX); |
22 | }
|
23 | }
|
der Output sieht so aus
1 | ############################# |
2 | ## Packet received ## |
3 | ############################# |
4 | Analysing data |
5 | Bind packet received |
6 | Adress is: 3017D8 |
7 | |
8 | ############################# |
9 | ## Packet received ## |
10 | ############################# |
11 | Analysing data |
12 | Bind packet received |
13 | Adress is: 3013D8 |
14 | |
15 | ############################# |
16 | ## Packet received ## |
17 | ############################# |
18 | Analysing data |
19 | Bind packet received |
20 | Adress is: 3013D8 |
da ist schonmal zwischen den ersten beiden Paketen ein Unterschied in der Adresse. Wenn ich Fernbedienung und Arduino neu starte kommt auch mal was anderes
1 | ############################# |
2 | ## Packet received ## |
3 | ############################# |
4 | Analysing data |
5 | Bind packet received |
6 | Adress is: 3213D8 |
Konfiguration:
1 | Mirf.spi = &MirfHardwareSpi; |
2 | Mirf.init(); |
3 | Mirf.configRegister(CONFIG, _BV(EN_CRC) | _BV(CRCO)); |
4 | Mirf.configRegister(EN_AA, 0x00); // no auto ack |
5 | Mirf.configRegister(EN_RXADDR, 0x3f); // all Pipes enabled |
6 | Mirf.configRegister(SETUP_AW, 0x03); // 5 bytes - default |
7 | Mirf.configRegister(SETUP_RETR, 0xff); // not relevant for receiver |
8 | Mirf.configRegister(RF_CH, 0x08); // channel eight |
9 | Mirf.configRegister(RF_SETUP, 0x05); // 1Mbps |
10 | Mirf.configRegister(STATUS, 0x70); |
11 | Mirf.configRegister(OBSERVE_TX, 0x00); |
12 | Mirf.configRegister(CD, 0x00); // CD-RPD |
13 | Mirf.configRegister(RX_PW_P0, 16); |
14 | Mirf.configRegister(RX_PW_P1, 16); |
15 | Mirf.configRegister(FIFO_STATUS, 0x00); |
16 | Mirf.setTADDR((byte*)("\x66\x88\x68\x68\x68")); |
17 | Mirf.setRADDR((byte*)("\x88\x66\x86\x86\x86")); |
18 | Mirf.flushRx(); |
19 | Mirf.powerUpRx(); |
Vielleicht weiß jemand Rat
Hallo Danke schonmal für die Antwort, vorerst noch nicht, ich hab mich auf [1] verlassen und dachte ich könnte auch auf konstantem Kanal "bereits etliche Datenpackete pro Sekunde empfanden". [1] https://github.com/hackocopter/Documentation/tree/master/RemoteControl/Receiver-Test
Christopher B. schrieb: > Hallo Danke schonmal für die Antwort, > > vorerst noch nicht, ich hab mich auf [1] verlassen und dachte ich könnte > auch auf konstantem Kanal "bereits etliche Datenpackete pro Sekunde > empfanden". > Hallo Christopher, das war bei mir so, aber auch nicht auf allen Kanälen. Außerdem hängt das Channelhopping ja auch von der ID der Fernbedienung ab. Das Schema kann bei Dir also ein anderes sein. Später im Thread kommen ja auch noch einige Beträge zur Dekodierung des Funkschemas aus den SPI-Daten, die meinem Versuch etwas widersprechen.
Hallo, danke an Tim und Helmut für die Antworten, aber der Fehler lag ganz wo anders. Ich habe ja (leider) diese Mirf Lib vom Arduino benutzt und da kommt dieses
1 | Mirf.powerUpRx(); |
was mir leider das Bit CRCO löscht. Nachdem ich dass dann manuell wieder gesetzt habe, hat es auf Anhieb funktioniert. Das Frequenzhopping ist nun auch drin, aber richtig flüssig läuft das noch nicht. Es gibt immer wieder Sekunden in denen gar nichts ankommt. In manchen Sekunden kommen 3-4 Pakete. Aber es sollte eigentlich viel mehr sein, oder? Die ID meiner Fernbedienung ist 0x30 0x13 0xD8 Tabelle ist dementsprechend die dritte und das Inkrement ist 6. Damit komm ich auf folgende Kanäle: [28 2d 1d 3f 3a 2e 31 23 1e 2d 27 3e 16 2c 26 25] LG Christopher
Christopher B. schrieb: > Die ID meiner Fernbedienung ist 0x30 0x13 0xD8 > Tabelle ist dementsprechend die dritte und das Inkrement ist 6. Damit > komm ich auf folgende Kanäle: komme auf das gleiche Ergebnis
1 | calculating from 30 13 D8 : Sum 1B Inc 06 |
2 | 40 45 29 63 58 46 49 35 30 45 39 62 22 44 38 37 <dec |
3 | [28 2d 1d 3f 3a 2e 31 23 1e 2d 27 3e 16 2c 26 25 <hex |
Das könnte natürlich auch an der gleichen Quelle der Beschreibung u/o Software liegen. Die Zeit zwischen zwei Reads war so um die 8 ms, lange Pausen sind mir nicht aufgefallen. Meine FB nennt sich jd385.
Mal ein Zwischenstand. Hier ist die neu geordnete Dokumentation: https://github.com/hackocopter/JD385_Documentation Hier die Anleitung zum Flashen mit ST-Link: https://github.com/hackocopter/JD385_Documentation/tree/master/Quad%20Firmware%20Flashing
Hallo mal ein kleines Update von mir. Also ich hab mal den Logic Analyzer an die Fernbedienung gehangen und hab dadurch die Belegung des verbauten Funkmoduls in der Fernbedienung (meine heißt übrigens auch JD-385) herausfinden können. Vorher hatte ich nach diesem Modul gesucht aber nichts gefunden. Habe Bilder davon und werde die noch beschriften und dann teilen. Jedenfalls was beim Sniffen herausgekommen ist, ist, dass die Fernbedienung genau die Kanäle einstellt die wir hier errechnet haben. Soweit hat also alles gepasst. Bloß hat die Ausgabe auf der Schnittstelle zum PC offenbar solange gedauert dass ich zwischendrin Pakete (mindestens 2) nicht bekommen habe und so nicht weitergehoppt wurde. Außerdem hab ich den Ort beim testen gewechselt. Ich war vorher wohl in einer von WLAN vereuchten Umgebung. Dadurch bin ich aber auf eine Idee gekommen. Ich hoppe immer sobald ich ein gültiges Paket empfangen habe. Das nächste Paket auf der neuen Frequenz müsste in etwa 16ms kommen. Wenn ich nach 20ms kein neues Paket empfange, dann wechsel ich auf den nächsten Kanal, weil ich davon ausgehe, dass der derzeitige gestört ist. lg Christopher
Gibt es das Teil auch ab 25€ bei ebay? http://www.ebay.de/itm/MINI-Quadcopter-6-axis-2-4ghz-4-Kanal-Gyro-UFO-RC-Hubschrauber-Helikopter-/200997651082?pt=RC_Modellbau&var=&hash=item2ecc64c28a /MINI Quadcopter 6 axis 2,4ghz 4 Kanal Gyro UFO RC Hubschrauber Helikopter/ Ist das der Gleiche oder ein sehr ähnliches Modell? Bin ein Noob, habe davon keine Ahnung. Gruß Fabian
> Ist das der Gleiche oder ein sehr ähnliches Modell? Ja. siehe: http://www.china-gadgets.de/gadget/hubsan-x4-h107-micro-quadrocopter/
Augenscheinlich gibt es den H4 auch noch mal als X-Dart: http://www.ebay.de/itm/121265393174?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1438.l2649 Abgesehen von der Gehäusefarbe wohl identisch.
Hat jemand den Sender mit Display und kann man ein Foto des aktiven Displays hier einstellen? Sind Hinweise auf den Typ / Hersteller auf dem Display zu erkennen?
Gibt es den Sender mit Display? Die Hubsan X4 FB hat ein Display, diese scheint aber ein anderes Innenleben zu haben, da sie auch einen anderen Tranceiver nutzt. Übrigens gibt es inzwischen ein neueres Modell, den JXD388: http://www.banggood.com/JXD-388-2_4G-4CH-6-Axis-Gyroscope-RC-Quadcopter-With-4-Lights-RTF-p-912240.html Die FB ist die gleiche. Das Innenleben auch. http://www.rcgroups.com/forums/showthread.php?t=2055735
Christopher B. schrieb: > Dadurch bin ich aber auf eine Idee gekommen. Ich hoppe immer sobald ich > ein gültiges Paket empfangen habe. Das nächste Paket auf der neuen > Frequenz müsste in etwa 16ms kommen. Wenn ich nach 20ms kein neues Paket > empfange, dann wechsel ich auf den nächsten Kanal, weil ich davon > ausgehe, dass der derzeitige gestört ist. Super Arbeit. Funktioniert das soweit? Interessant wäre es, diesen Code jetzt auf dem copter selbst zum Laufen zu bringen :)
Nunja, es funktioniert bisher um einiges besser als stupide die Kanäle durchzuhoppen. Ich habe aber manchmal Probleme überhaupt was zu empfangen. Eventuell muss ich mir nochmal ein neues Modul schnappen und weiter weg von der USB-Buchse vom Arduino anbringen. Ich hab nämlich ein echtes Problem mit Störungen. Ich werde jetzt nochmal das Programm von Helmuth ausprobieren. Wenn ich da auch so wenig Pakete empfange dann liegt es an meinem HW-Setup. Ich melde mich in jedem Fall wenn ich weiter gekommen bin. Tim schrieb: > Übrigens gibt es inzwischen ein neueres Modell, den JXD388: Super, der hat einen Ein-Aus-Schalter :) EDIT: Übrigens auch als BNF-Version, also ohne Fernbedienung für unter 21€ zu haben. Also definitiv Einfuhrumsatzsteuerfrei http://www.banggood.com/JinXingDa-JXD388-2_4G-6-Axis-Gyroscope-RC-Quadcopter-BNF-p-912835.html
Kann man das B 'n' F Modell auch mit der Fernbedienung der Hubsan X4 Klone, also den JD-185 bzw. JD-385 steuern? Danke Fabian
Das Innenleben und die Fernbedienung von JD388 und JD385 scheinen identisch zu sein. Nur das Platinenlayout ist anders. SWD und UART sind aber immer noch herausgeführt. Ich habe die BNF-Version vor einer Weile bestellt. Werde Bilder machen, wenn der copter ankommt. http://www.rcgroups.com/forums/showthread.php?t=2071264 http://www.rcgroups.com/forums/showthread.php?t=2073713
Ich habe mal bei laufendem Sender - sowohl im Modus "bind" als auch "run" - alle 128 Kanäle abgehorcht. Seltsamerweise sind Kanal 7 und Kanal 8 immer recht aktiv, obwohl sie in meiner Hop-Liste nicht aufgeführt werden. Wenn ich es richtig gelesen habe, wird auf Kanal 8 auch initialisiert und das Binding gemacht. Aber wieso ist der Kanal auch danach noch aktiv? Noch eine Idee gesucht: Wie synchronisiert man am sinnvollsten das Hüpfen? Auf dem ersten Kanal der Tabelle auf ein Paket warten und dann loslegen? Aber was ist, wenn ausgerechnet dieser Kanal gestört ist? Hat schon mal jemand einen kompletten lauffähigen und hüpfenden Empfänger realisiert?
Angehängte Dateien:
-

Mode-binding.png
4,4 KB -

Mode-run.png
4,7 KB
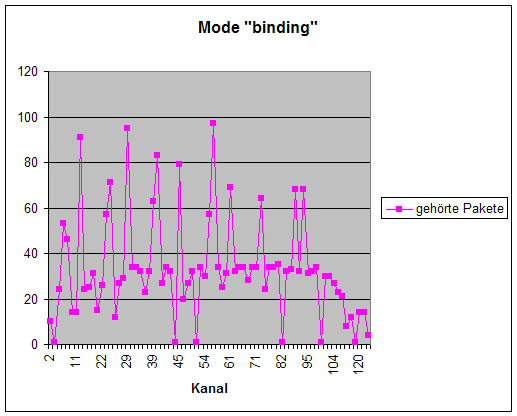
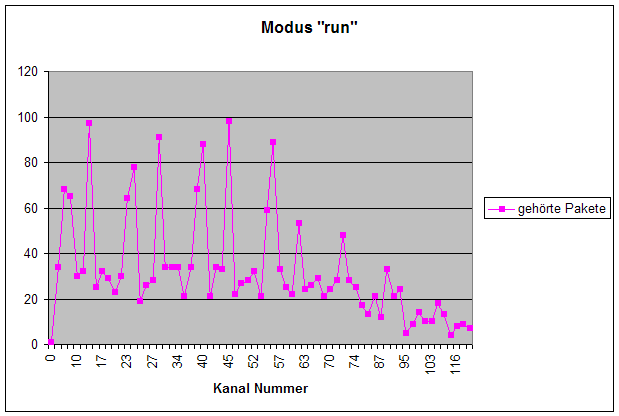
Anbei zwei Grafiken. Es wurde jeweils pro Kanal eine feste Zeit gewartet und es wurden die in dieser Zeit gehörten Pakete gezählt. Eine Kontrolle bei ausgeschaltetem Sender zeigte, dass keine Störsender in der Luft waren. Die Hopliste: 034 039 023 057 052 040 043 029 024 042 033 056 013 038 029 031 Tx-ID: 7F 7E 26
Georg G. schrieb: > Noch eine Idee gesucht: Wie synchronisiert man am sinnvollsten das > Hüpfen? Auf dem ersten Kanal der Tabelle auf ein Paket warten und dann > loslegen? Aber was ist, wenn ausgerechnet dieser Kanal gestört ist? Hat > schon mal jemand einen kompletten lauffähigen und hüpfenden Empfänger > realisiert? Das ist bei genauerer Betrachtung tatsächlich nicht trivial. Eine gute Idee habe ich auch nicht. Wie läuft es denn z.B. bei Bluetooth, welches im gleichen Freqenzbereich hüpft?
Angehängte Dateien:
-

box-back.jpg
84 KB -

box-front.jpg
93 KB -

quadtop.jpg
130 KB -

quadbot.jpg
98 KB -

quadtop2.jpg
84 KB -

pcb_bot.jpg
170 KB -

pcb_top.jpg
160 KB
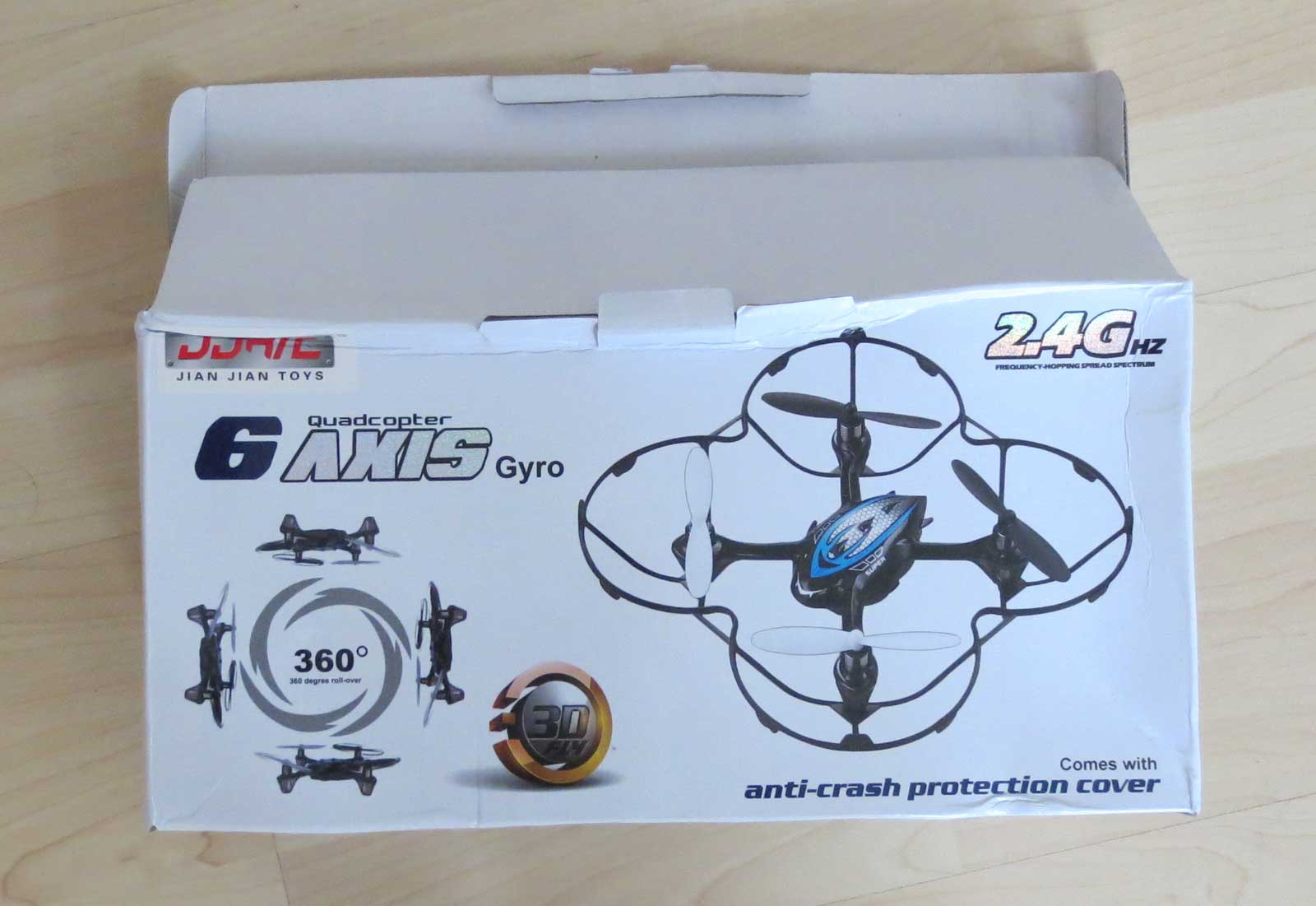




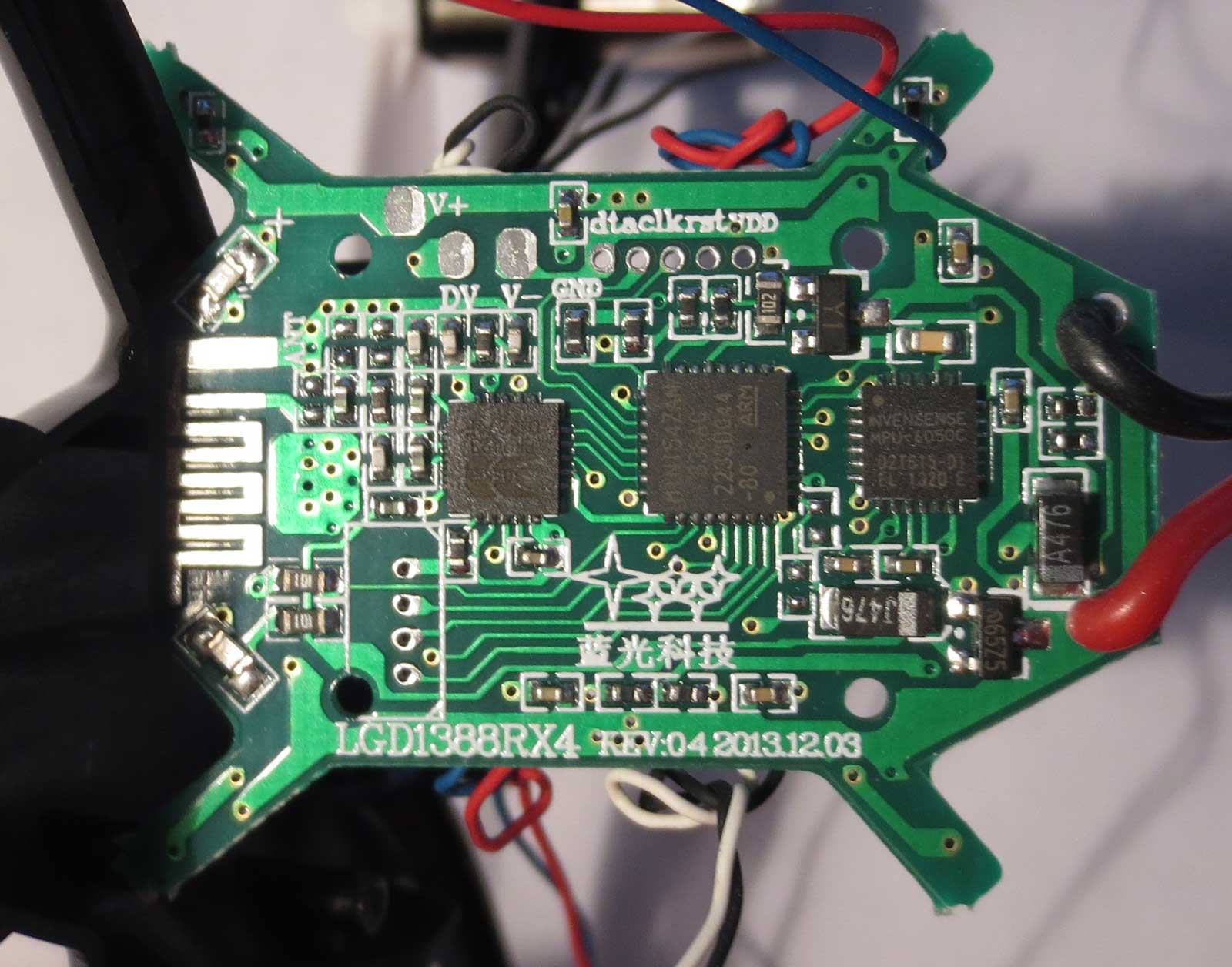
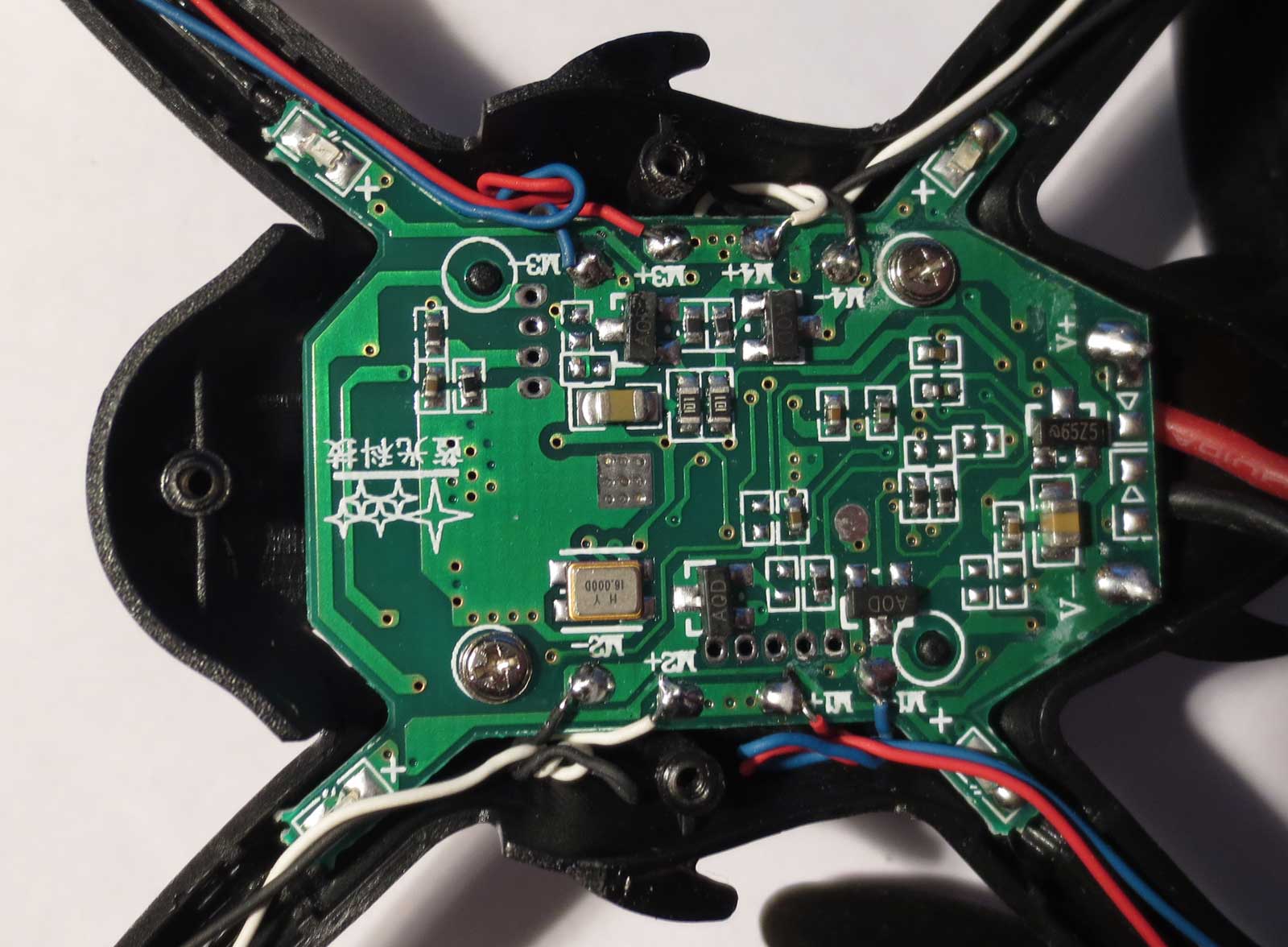
Ich habe noch einen anderen Quadcopter bekommen, der auf der gleichen Hardware mit leichten Modifikationen aufbaut. Interessanterweise hat er eine Fernbedienung mit LCD. Anbei ein paar Bilder. Nennt sich "F180". Ich habe ihn als Sonderangebot von T-Mart gekauft. Jetzt ist er etwas teurer.
Angehängte Dateien:
-

remote_front.jpg
110 KB -

remote_pcb_front.jpg
110 KB -

remote_pcb_back.jpg
190 KB -

remote_detail.jpg
210 KB -

remote_mcu.jpg
130 KB



Wer sich für DFM interessiert wird an dem Ding seine Freude haben. Es ist gegenüber der letzten Variante einiges optimiert worden. Das Design ist vom 3. Dezember. Bestellt habe ich anfang Februar. Eine ziemlich beeindruckende time to market, das bekommt ein deutscher Großkonzern nicht hin :) Die zwei Heizbatterien in der Fernbedienung hat man auch herausoptimiert. Jetzt gibt es nur noch einen LDO und nur vier Batterien, obwohl die Hardware fast gleich ist. Das LCD ist übrigens völlig nutzlos und zeigt nur Thrust in % und die Richtung des Trimmings an. Die Signalstärkeanzeige kann prinzipbedingt nicht funktionieren, ob die Battieranzeige funktioniert, weiss ich nicht.
Fabian Hoemcke schrieb: > @Tim, hast Du mal n Link wo man das bestellen kann? http://www.tmart.com/DFD-F180-6-Channel-2.4GHz-Remote-Control-RC-Quadcopter-Black-Blue_p234623.html
Hier mal eine Zusammenfassung nach meinem Verständnis - ARM CPU muss erst gelöscht/unlocked werden, damit neue Firmware übertragen werden kann - Original-Programmieradapter und Klone können diesen erase-Vorgang von Haus aus, sind aber hier nur zur Analyse genutzt worden: - es geht auch mit SWD Interfaces wie ST-Link, setzt aber eine bestimmte Kommandosequenz voraus - diese Sequenz lässt sich mit manchen IDEs durchführen - es gibt eine Minimalsoftware für die kostenlose, codegrößenbegrenzte KEIL µVision IDE (legacy device support erforderlich wg. Umstellung), die LEDs blinken lässt - Anleitung und Minimalsoftware s.u. - es gibt Flug-Software für ähnliche Hardware, aber die meisten Projekte setzen größere Controller mit mehr Programmspeicherplatz ein - es gibt also noch keine fliegende Alternativ-Firmware - das Funk-Protokoll der Fernbedienung ist weitestgehend entschlüsselt und ist ähnlich zu internet-bekannten Spielzeugen -- Sender-Code existiert -- Empfänger-Code in Arbeit - der enthusiastisch angelegte Wiki-Artikel http://www.mikrocontroller.net/articles/Hack-O-Copter ist weitestgehend informationslos - cpldcpu hat seine ganze Arbeit unter https://github.com/hackocopter/ dokumentiert - das Interesse hat nachgelassen, da die original-Firmware offenbar gut funktioniert und das Gerät für Erweiterungen nur wenig Raum bzw. Schub bietet - Vorgehen für offene Flug-Software: Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter" - die Ladeschaltung begrenzt nur den Ladestrom (Spannungsabhängig) und basiert auf der integrierten Sicherheitsabschaltung des Akkus
Info schrieb: > -- Sender-Code existiert Es gibt Code (Deviation), der die Funktionen des Senders nachbilden kann, der aber für andere Hardware geschrieben wurde. Für den originalen Sender gibt es keinen Code. > -- Empfänger-Code in Arbeit Das ist sehr optimistisch ausgedrückt. Es gibt Ansätze und noch Probleme. > - das Interesse hat nachgelassen, da die original-Firmware offenbar gut > funktioniert und das Gerät für Erweiterungen nur wenig Raum bzw. Schub > bietet Die vorhandene Firmware ist sehr verbesserungswürdig. Die gängigen Boards für größere Copter (KK, Multi-2 usw) bieten auch nur wenig mehr Resourcen. Der Prozessor reicht schon hin. Das größere Problem ist die Hardware. Das Ding ist einfach zu klein und zu schwach, um es im Freien zu fliegen (in 10m Höhe sieht man nicht mehr, wo vorn und hinten ist und eine leichte Bö versetzt den Copter in Sekundenschnelle um 50m). Und im Innenraum hat man meist nicht genug Platz. Wer wohnt schon in einer Turnhalle? Für einen Flip sollte man 2m Luft in alle Richtungen haben... > - die Ladeschaltung begrenzt nur den Ladestrom (Spannungsabhängig) und > basiert auf der integrierten Sicherheitsabschaltung des Akkus Der Akku hat keine Sicherheitsschaltung. Die Ladeschaltung begrenzt Strom und Spannung und funktioniert erstaunlich gut. Aber das Ding macht Spaß, mehr als die kleinen Koax-Helis, die sind einfach viel zu stabil :-)
Mal wieder etwas zum Nachdenken/Diskutieren: Das Hüpfmuster des Senders passte nach ersten Messungen nicht zur Theorie. Es erschienen deutlich mehr Kanäle als die erwarteten 16. Und bei den erwarteten Kanälen war kein Maximum in der Verteilung. Tim hat vor Monaten das auch festgestellt. Ich habe nun mal einen Logik Analysator an die Pins des HF Moduls gehängt und den Verkehr mitgeschrieben. Es ist in schöner Folge alle 4ms "lese Status, lösche Tx-Interrupt Flag, setze Kanal, sende Packet, große Pause". Und die geschriebenen Kanal Nummern passen exakt zu den erwarteten 16 Werten (die übrigens nicht immer 16 verschiedene sein müssen). Muss man nun folgern, dass der Empfänger viel Müll hört (aber richtig! CRC passt!)? Was bedeutet das für die Bindung Phase? Kanal 8 wird mitnichten immer verwendet. Beim Binding mittels Kanal 8 leben wir von Schmutzeffekten? Fakt ist, dass es funktioniert. Als Ingenieur rollen sich mir aber momentan die Fußnägel hoch.
Georg G. schrieb: > Was bedeutet das für die Bindung Phase? Kanal 8 wird mitnichten immer > verwendet. Beim Binding mittels Kanal 8 leben wir von Schmutzeffekten? Hallo Georg, grundsätzlich stimme ich dir da zu, aber weiter oben sieht man meine Kanalliste und da ist Kanal 8 nicht mit drin. Trotzdem stellt meine Fernbedienung beim Start erstmal Kanal 8 ein. Aber da werden dann auch nur zwei Pakete gesendet. lg
Christopher B. schrieb: > Trotzdem stellt meine > Fernbedienung beim Start erstmal Kanal 8 ein. Aber da werden dann auch > nur zwei Pakete gesendet. Dann hast du eine andere Fernbedienung als ich (JD-385). Auf Kanal 8 kommt nur 1 Paket, das auch nicht das Bind-Flag gesetzt hat. Dieses Paket hat offensichtlich keinen Sinn, man kann es weglassen. Ich hänge die komplette etwas kommentierte Initialisierung meines Senders an (Analyser am SPI Port). Man sieht Abweichungen vom Beken Datenblatt. Ich gehe mal davon aus, dass viele Dinge im Code "historisch gewachsen" sind. Der Sender streut offenbar breit und man kann auf Kanal 8 zuverlässig empfangen, obwohl dort nicht gesendet wird. Im Prinzip reicht ja ein Paket und man kann auf die Tabelle synchronisieren. Dann muss ich mir wohl mal einige N79E814 besorgen oder einen Adapter für einen ATMega bauen. Den originalen Chip möchte ich (noch) nicht löschen. Schliesslich will ich ja ab und an mal spielen :-)
Das passt auf jeden Fall zu meinen Ergebnissen. Wobei ich immer noch nicht recht glauben mag, dass es an fehlender Trennschärfe liegt. Es kann natürlich sein, dass das Signal auf den Nachbarkanälen sehr schwach ist und man es nur deswegen empfängt weil die Distanz gering ist und auf dem Kanal kein Sender ist. Georg, wenn Du willst kann ich Dir eine FB oder deren Innerein gegen Porto überlassen. Bei mir haben sich ein paar Angesammelt :)
Ich habe mal versucht, das Protokoll der FB in Prosa zu fassen. Fragen, Ergänzungen und Korrekturen bitte per p-Mail an mich.
Angehängte Dateien:
-

spek_modus_ein.png
170 KB -

spek_modus_hebel_oben.png
170 KB -

spek_modus_normal.png
170 KB -

normal_spektrogram.png
52 KB
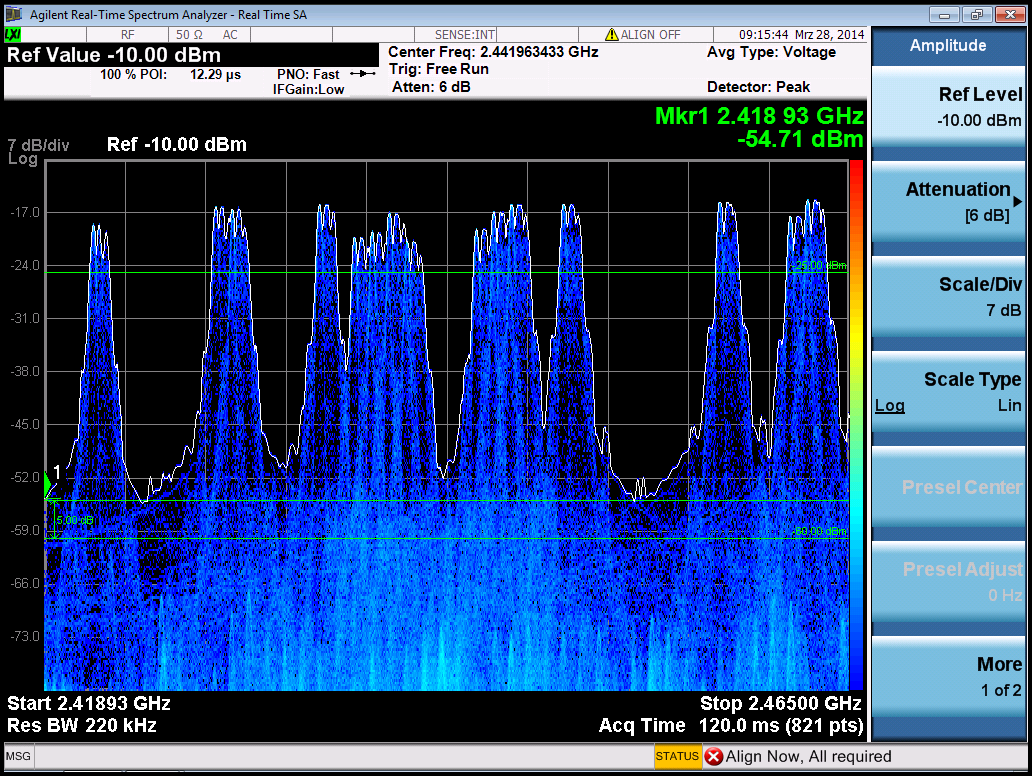
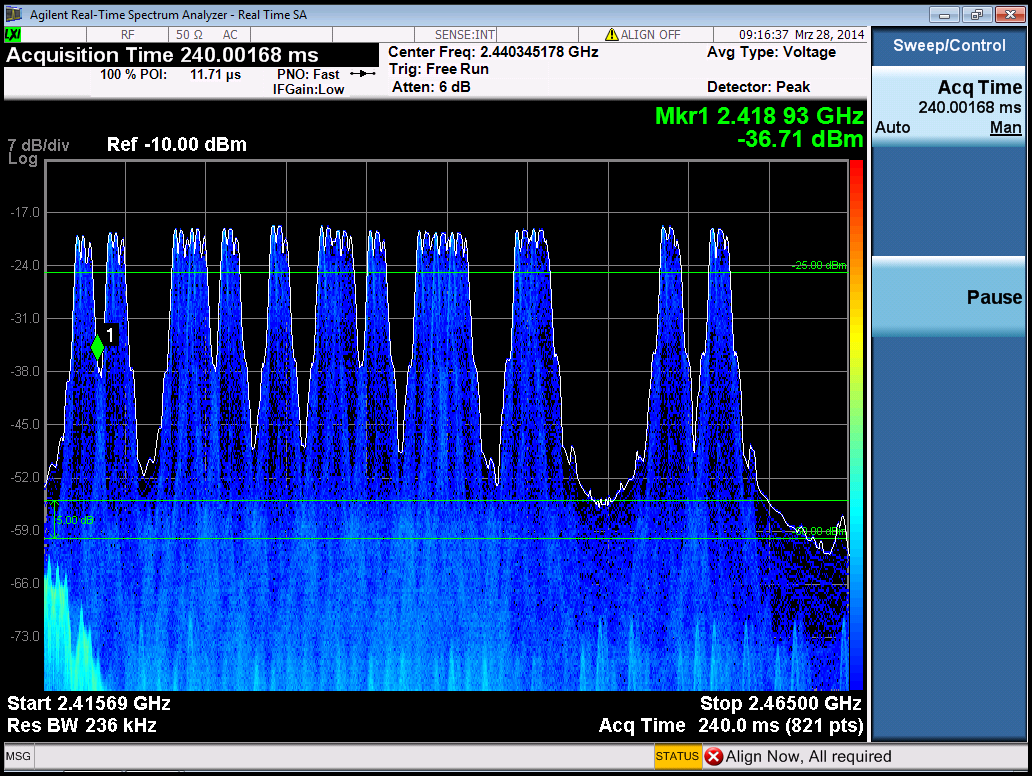
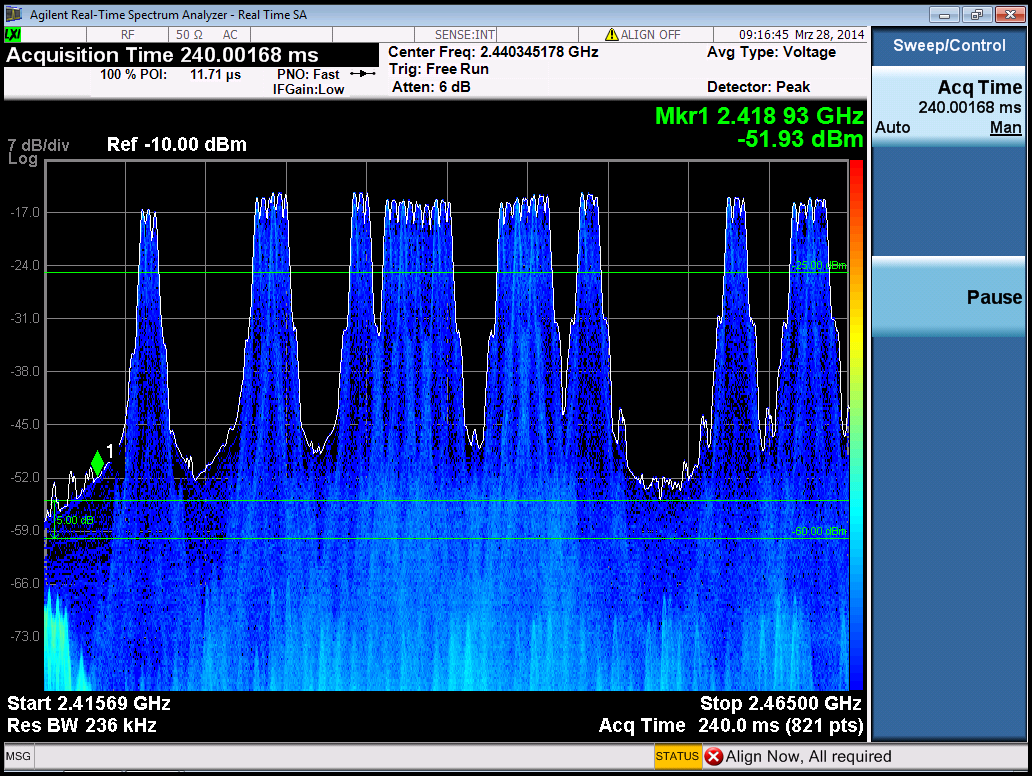
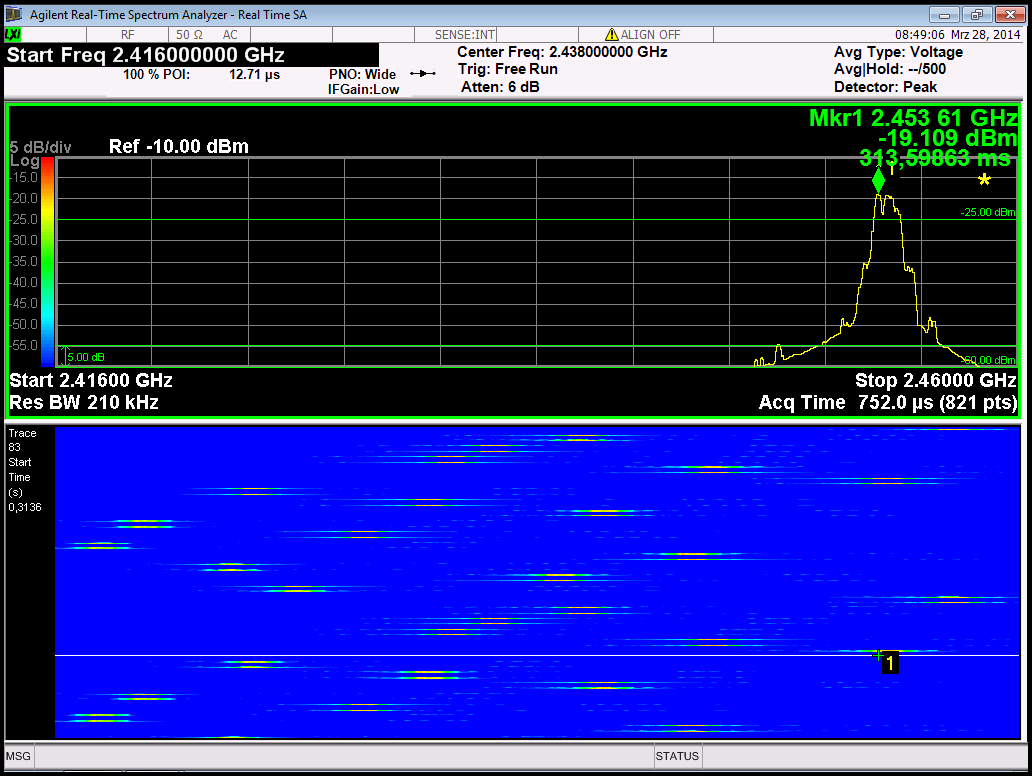
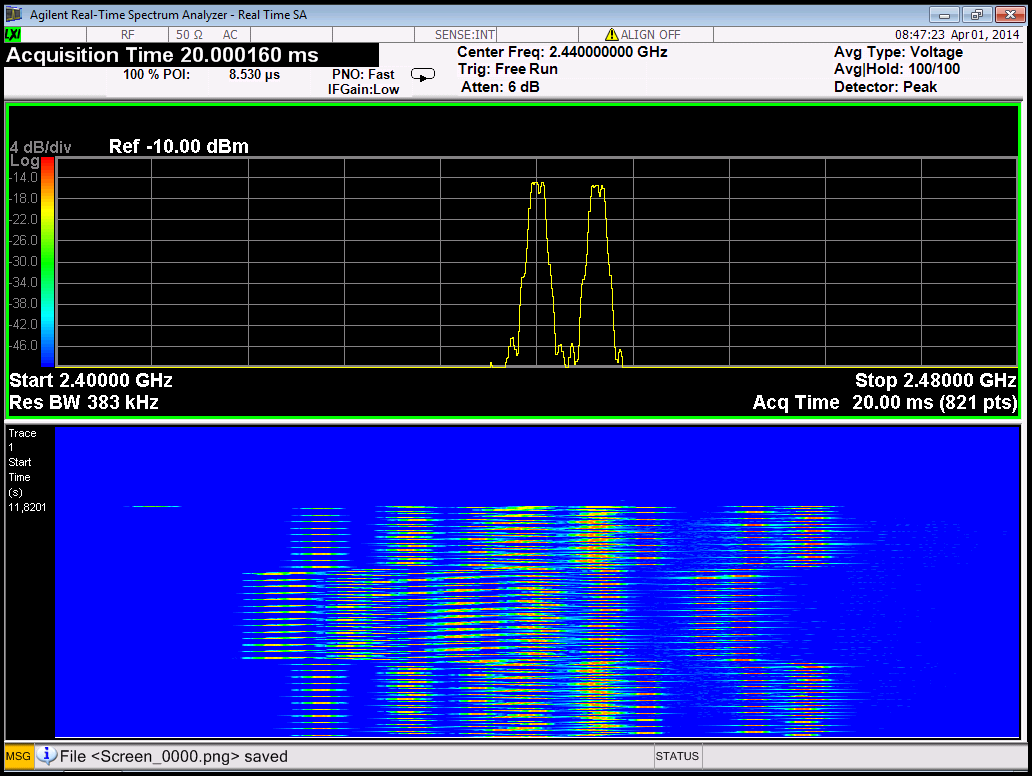
Ich habe mal das kleine Spielzeug neben das große Spielzeug gestellt. Die belegten Kanäle (und wahrscheinlich auch die gesendeten Daten) ändern sich je nach Betriebsmodus: * direkt nach dem Einschalten (modus_ein) * Hebel ganz nach oben gedrückt (hobel_oben) * synchronisiert (modus_normal) Ob wirklich synchronisiert wurde, kann die Fernbedienung nicht wissen, da der Rückkanal fehlt, aber sie piept trotzdem :-) Den synchronisierten Modus habe ich nochmal näher untersucht. Man erkennt, das die einzelnen Frequenzen zyklisch durchlaufen werden. Ein Zyklus dauert ca. 128 ms und besteht aus 16 "Symbolen". Jedes "Symbol" besteht aus zwei Impulsen im Abstand von 4 ms. Dann wird die Frequenz gewechselt (normal_spektrogram). Hier ein Zyklus als Liste:
1 | Frequenz Zeit |
2 | GHz ms |
3 | 2,45361 180,503 |
4 | 2,45356 184,257 |
5 | 2,42501 188,018 |
6 | 2,42507 192,535 |
7 | 2,43263 196,289 |
8 | 2,43269 200,805 |
9 | 2,44068 204,566 |
10 | 2,44068 208,320 |
11 | 2,42002 212,081 |
12 | 2,42008 216,598 |
13 | 2,43000 220,352 |
14 | 2,43006 224,868 |
15 | 2,41804 229,377 |
16 | 2,41804 232,383 |
17 | 2,44503 236,900 |
18 | 2,44503 241,409 |
19 | 2,42405 245,170 |
20 | 2,42405 249,687 |
21 | 2,43864 252,693 |
22 | 2,43864 257,202 |
23 | 2,42705 261,718 |
24 | 2,42673 265,472 |
25 | 2,45662 269,989 |
26 | 2,45662 273,750 |
27 | 2,43972 277,503 |
28 | 2,43960 282,020 |
29 | 2,43569 285,781 |
30 | 2,43564 289,535 |
31 | 2,43403 294,052 |
32 | 2,43403 297,813 |
33 | 2,44562 301,567 |
34 | 2,44605 306,083 |
Das müßte sich ja mit den Daten der Protokollanalyse decken. Viele Grüße, Volker
Volker schrieb: > Die belegten Kanäle (und wahrscheinlich auch die gesendeten Daten) > ändern sich je nach Betriebsmodus: Das wäre etwas neues. Die belegten Kanäle werden fest durch die Seriennummer des Senders vorgegeben. Die Kanäle und damit die Frequenzen kannst du dir selbst errechnen (siehe Protokoll.pdf). Es ändern sich nur die Daten. Erstaunlich ist für mich nur, wie schön der Empfänger den Splatter dekodieren kann. Das macht das synchronisieren nicht einfacher. > * direkt nach dem Einschalten (modus_ein) Es werden Pakete mit Flag 0xc0 gesendet, alle anderen Daten sind "normal". > * Hebel ganz nach oben gedrückt (hobel_oben) Es wird "Vollgas" mit Flag 0xc0 gesendet, alles andere sind die normalen Daten. > * synchronisiert (modus_normal) Das Flag ändert sich auf 0x00 (bzw 0x04 während "Flip" gedrückt ist).
Georg G. schrieb: >> Die belegten Kanäle (und wahrscheinlich auch die gesendeten Daten) >> ändern sich je nach Betriebsmodus: > Das wäre etwas neues. Die belegten Kanäle werden fest durch die > Seriennummer des Senders vorgegeben. Das schließt sich ja nicht aus. Die ersten drei Bilder zeigen, daß zumindest meine FB, zwischen Einschalten, Vollgas und normal verschiedene Frequenzen benutzt. Vielleicht wird bei mir noch zwischen den Tabellen gewechselt? Der Wechsel ist nicht ganz einfach zu erkennen, da ich Start/Stop angepasst habe, aber der Marker steht jeweils auf der selben Frequenz. > Die Kanäle und damit die Frequenzen > kannst du dir selbst errechnen (siehe Protokoll.pdf) Mit meiner Frequenzliste und Deiner protokoll.pdf, kommen folgende Kanäle raus (alles hex): 36, 19, 21, 29, 14, 1E, 12, 2D, 18, 27, 1B, 39, 28, 24, 22, 2E Das entspricht genau Deiner Tabelle 0. Den Offset hatte ich willkürlich gewählt. Viele Grüße, Volker
Volker schrieb: > Vielleicht wird bei mir noch zwischen den Tabellen gewechselt? Dann hättest du die erste Fernbedienung dieser Art. Kannst du uns bitte den Typ nennen?
Georg G. schrieb: > Dann hättest du die erste Fernbedienung dieser Art. Kannst du uns bitte > den Typ nennen? Den genauen Typ kann ich Dir momentan nicht nennen, erst nächste Woche wieder. Dann kann ich auch die startup und die pairing Sequenz nochmal gezielt aufnehmen. Hatte es bei der letzten Messung erst am Ende entdeckt. Viele Grüße, Volker
Angehängte Dateien:
Georg G. schrieb: > Kannst du uns bitte den Typ nennen? Auf der Fernbedienung steht JD-385 und 2.4 MHz. Sonstige Aufschriften, wie Seriennummern sind nicht zu erkennen und ein LC-Display ist auch nicht vorhanden. Ich habe die Einschaltsequenz noch einmal gezielt aufgenommen. Man sieht, es wird zwischen zwei Hopping-Sequenzen gewechselt. Es gibt die normale Sequenz und die pairing Sequenz. Die Frequenzen/Kanalnummern der normalen Sequenz lauten bei mir:
1 | dez: 63, 58, 46, 49, 35, 30, 45, 39, 62, 22, 44, 38, 37, 40, 45, 29 |
2 | hex: 3F, 3A, 2E, 31, 23, 1E, 2D, 27, 3E, 16, 2C, 26, 25, 28, 2D, 1D |
Die Frequenzen/Kanalnummern der pairing Sequenz lauten bei mir:
1 | dez: 57, 40, 37, 34, 46, 54, 25, 33, 41, 20, 30, 18, 45, 24, 39, 27 |
2 | hex: 39, 28, 25, 22, 2E, 36, 19, 21, 29, 14, 1E, 12, 2D, 18, 27, 1B |
Die pairing Sequenz ist Deine Tabelle 0. Die normale Sequenz finde ich dort nicht. Viele Grüße, Volker
Nun wird es richtig mysteriös. Auf meiner FB steht das gleiche (nur, dass es 2.4GHz und nicht 2.4MHz sind). Ich habe mit einem Logikanalysator aufgezeichnet, was dem Sendemodul übermittelt wurde. Und das waren sowohl beim Binding als auch im Betrieb die Werte aus der Tabelle, die sich aus der Seriennummer errechnen lies. In welchem zeitlichen Abstand wird zwischen den Tabellen umgeschaltet? Kannst du dir die Pakete mitschreiben? Da steht immer die Seriennummer drin.
Georg G. schrieb: > In welchem zeitlichen Abstand wird zwischen den Tabellen umgeschaltet? Im Spektrogramm sieht man, wie der Sender eingeschaltet wird. Dann hab ich den Gashebel hoch und wieder runter bewegt und losgelassen. Der Hebel bestimmt also die Zeitachse (in dem Fall Y). > Kannst du dir die Pakete mitschreiben? Da steht immer die Seriennummer > drin. Da muss ich erstmal sehen, ob der Spektrumanalysator die GFSK dekodieren kann... Viele Grüße, Volker
Ich konnte gerade das "Flying Saucer Aircraft JD-385" fliegen und stelle fest, dass es in der Tat etwas schwierig zu fliegen ist, da entweder die Regelung oder die Fernsteuerung keine "feinfühlige" Steuerung zulässt. Speed Stufe 1 ist zu träge, Stufe zwei ist OK, #3 zu empfindlich für meinen Geschmack. Aber richtig proportional erscheint es mir nicht, eher digital. Außerdem ist die Federkraft meiner Steuerknüppel nicht gleich. Sind da wirklich Potis drin oder irgendwelche quasibinären Kohle-Gummis? Mein Vergleich: Eigenbau mit STM32F3-Discovery und "tau labs". Die Packung hat einen eachbuyer.com Aufkleber: http://www.eachbuyer.com/mini-6-axis-4-channels-2-4ghz-remote-control-gyro-flying-aircraft-rc-helicopter-p175545.html -- aber der Preis passt nicht zum *bay-Angebot.
Info schrieb: > Sind da wirklich Potis drin E sind Potis drin, Fotos vom Innenleben findest du auf github und weiter oben in diesem Thread. Ansonsten stimme ich dir zu. Speziell die Höhenstabilisierung lässt sehr zu wünschen übrig. Die verbaute Hardware würde ein besseres Verhalten hergeben. Der Sender reagiert auch auf kleine Knüppel Ausschläge (sieht man an mitgeschriebenen Daten), das Problem muss im Empfänger liegen.
Angehängte Dateien:
-

RFM70-RxTx-sch.png
98 KB
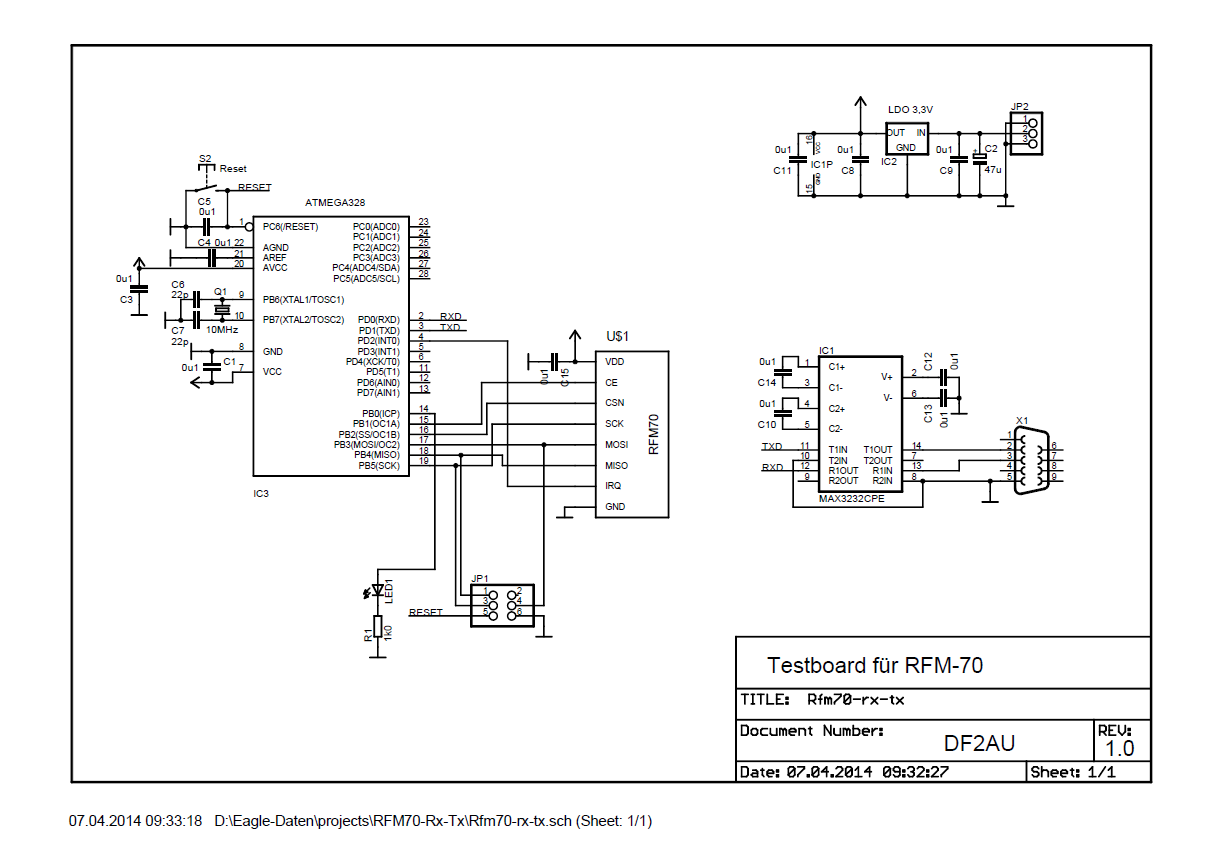
Anbei ein paar Programme, um die Fernbedienung JD-385 simulieren/empfangen zu können. Als Hardware sowohl für Sender als auch Empfänger dient eine kleine Schaltung mit einem ATMega328 (oder anderen, bitte im Programm dann die SPI Belegung anpassen) und einem RFM70-Modul. Das Schaltbild ist in RFM70-rx-tx-sch.png zu finden. Monitor.c dekodiert die Pakete der Fernsteuerung. Es wird nur Kanal 8 empfangen. Da der Empfänger sehr breitbandig ist, hört er auf dem Labortisch auch den hüpfenden Sender zuverlässig. RFM70-fb-rx.c ist ein Empfänger, der auf den Sender synchronisiert und ihm in der Frequenz folgt. Über Pulsfolgen an einigen Pins (siehe Programm) kann man verfolgen, ob es zu Aussetzern kommt. Das Folgen lässt sich auch stoppen und man kann gezielt einzelne Kanäle einstellen. Der Helptext im Programm sollte ausreichen. RFM70-fb-tx.c ist ein Sender, der passend zu seiner Seriennummer hüpfen kann, der aber auch auf festen Kanälen senden kann. Der Helptext zeigt die möglichen Funktionen. RFM70.c is eine Lib für das Modul. Sie stammt aus dem Internet und wurde für die Fernbedienung modifiziert und an einigen Stellen etwas umgeräumt. Nicht alle Funktionen sind getestet. Mit Überraschungen sollte man daher rechnen. Wer Fehler findet oder Anregungen hat, schickt mir bitte eine Mail. Dann will ich das gern einarbeiten. Der nächste Schritt ist, das alles in den originalen Sender zu stopfen. Sein HF-Modul ist zum RFM70 kompatibel (nicht zum nRF24L01!).
Der Prozessor im Sender enthält keinen Bootlader im LDROM. Er kann also nicht über ISP neu programmiert werden. Ich werde mir dann mal einen ICP Adapter beschaffen und weiter forschen. Übrigens: In dem Schrumpfschlauch, der als Antenne angebracht ist, verbirgt sich eine kleine Sperrtopf Antenne. Da hat ein Entwickler richtig mit gedacht. Wenn man den Antennen Plastik Knüppel am Gehäuse entfernt (er ist ohnehin nur Deko) und den Schrumpfschlauch statt dessen durch das Loch steckt, funktioniert der Sender drastisch besser. Man müsste es schaffen, den Sperrtopf im Inneren des Plastik Knüppels unter zu bringen...
Zwecks Programmierung der FB braucht man ein lesbares Datenblatt des Prozessors. Beim Hersteller gibt es nur das chinesische Original. Ich habe also einmal angefangen, die relevanten Teile ins Deutsche zu übersetzen. Wenn jemand zeit und Lust hat mitzumachen. ist er herzlich eingeladen. Chinesisch muss er nicht können. Es gibt eine Grobübersetzung von Dr. Gurgel. Mit etwas Spaß an Rätseln kann man daraus deutsche Prosa machen. Also... wer übernimmt ein Kapitel?
> Wenn man den Antennen Plastik Knüppel am Gehäuse entfernt (er ist ohnehin > nur Deko) und den Schrumpfschlauch statt dessen durch das Loch steckt, > funktioniert der Sender drastisch besser. Interessante Information, werde ich die Tage überprüfen. > Der nächste Schritt ist, das alles in den originalen Sender zu stopfen. > Sein HF-Modul ist zum RFM70 kompatibel (nicht zum nRF24L01!). Bedeutet dies, dass der nRF24L01 nicht mit dem Empfänger funktioniert?
Davis schrieb: > Bedeutet dies, dass der nRF24L01 nicht mit dem Empfänger funktioniert? Auf der HF Seite kann man beide kompatibel gestalten. Das ist bei der FB auch so gemacht. RFM70 und nRF24L01 sind aber nicht kompatibel auf der CPU Seite. Sie sind nur sehr ähnlich. Und der nRF24L01, speziell die "+" Variante, kann mehr. Mit der Bemerkung wollte ich nur sagen, dass man die Beispielsoft auf Github und auch die "richtige" Soft nicht 1:1 mit einem nRF24L01 verheiraten kann. Die notwendigen Änderungen sind aber schnell gemacht (andere Initialisierung).
Überraschende Neuigkeiten! Victor hat mit Hilfe unserer Dokumentation Bradwii auf einen V202 portiert und zum lauefen bekommen. https://github.com/victzh/bradwii
Tim als gast schrieb: > Bradwii auf einen V202 > portiert und zum lauefen bekommen. Super, dann steht IR-Kanonen oder einem Süßigkeiten-Abwurf ja nichts mehr im Wege! Allerdings traue ich mich noch nicht, meinen Flieger umzuflashen .. Hat jemand das Auto PID tuning schon ausprobieren können, sofern es an die Flip-Taste angebunden ist?
Mal eine Frage, warum so intensiv mit der Funke beschäftigen? Ich fliegen den JD 385 mit einer Devo 7e + nRF24L01, bis auf die Flips funktioniert das Super! Interessant ist eher die Hardware der Quad voll auszureizen, oder nicht?
Studentle schrieb: > warum so intensiv mit der Funke beschäftigen? Gute Frage :-) Von Tim habe ich eine Sender Platine bekommen. Also musste ich nicht meinen Copter schlachten. Und an irgend einer Ecke muss man ja anfangen. Außerdem missfällt mir die Steuerung sehr. Im Anfänger Mode ist sie zu träge, im Experten Mode zu wackelig, dazwischen geht es so. Da würde ich gern mal mit geänderten Kennlinien spielen. Wenn der Sender fertig ist, gehe ich an den Copter. Mich stört speziell die schlechte Stabilisierung der Höhe. Mal sehen, ob ich dann eine Platine aus einem zerstörten Copter bekomme.
Georg G. schrieb: >> Auto PID tuning > > Was ist das? PID ist (vermutlich) die Regelung, die das Ding fliegbar macht (Lageregelung): https://de.wikipedia.org/wiki/Regler#PID-Regler Den Regler muss man einstellen (tuning), d.h. seine Parameter finden. Das lässt sich aber auch automatisch machen -> auto-tuning. Dies ist in "bradwii" als Feature genannt und auch als Modul in dem o.g. Port vorhanden. Ob es eingebunden ist, habe ich noch nicht geprüft. Allerdings haben wir alle dieselbe Hardware, ein Satz optimaler Parameter genügt also :-)
@Georg Ja die Funke ist einem Preis entsprechend... Wie schon gesagt ich habe mir die DEVO 7e zugelegt die mit der DEVIATION Firmeware einiges leistet und preislich immernoch im Rahmen ist. Potis in i.O. und lassen sich schön parametieren. Mann kann auch eine Graupner Funke verwenden und mit Hilfe eines Arduino das PPM-Signal aus der DSC Buchse für das Funkmodul der original Funke verwenden. Dass die Portierung von Bradwii klappt, ist sehr schön zu höhren, damit wird der kleine richtig gut!
Gerade entdeckt, wer noch interesse hat: http://www.aliexpress.com/item/Newest-6-Axis-Gyro-2-4GHz-4-Channel-Remote-Control-RC-Quadcopter-UFO-Helicopter-Kids-Toy/1780689687.html 16,23USD Have fun!
Osterhasi schrieb: > Gerade entdeckt, wer noch interesse hat: Der Shop hat kein Feedback-Rating und bietet viele Produkte deutlich unter dem üblichen Preis an. Ich wäre vorsichtig - auf keinen Fall die Einspruchfrist verstreichen lassen.
Schaltbild des Senders aktualisiert (fehlende Bauteile, einige Bauteilwerte).
Wie hast du ("Turbonator") es in
Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter" geschafft, das
Motorgehäuse zu öffnen? Selbst mit Skalpell kann ich die Laschen nicht
aufbiegen bzw. ich komme nicht dahinter.
Gibt es eine empfehlenswerte Quelle für Ersatzmotoren?
Angehängte Dateien:
-

buersten.jpg
130 KB

Turbonator schrieb: > Das problem war das das lager hoch gerutscht ist und der anker aus der > bürste gerutscht ist . Welches Lager meinst du? Die Buchse am Stator? Durch einen Schlag würde sie doch eher nach innen wandern, und damit das axiale Spiel des Rotors vergrößern, und ihn nicht verklemmen - ich verstehe nicht, was die Ursache für den schwergängigen Motor ist. Sobald das Bürstengehäuse etwas gelockert wird, dreht er wieder. Ich das Gehäuse aufgebohrt - alle Grate etc. am Gehäuse sind aber im Weg, wenn man den Rotor entfernen will, aber auch der Motor passt nicht mehr so gut ins Flieger-Gestell. Die Bürsten haben jeweils drei "Finger", man muss aufpassen, dass beim Einsetzen des Kommutators der unterste Finger nicht verbiegt. Ansonsten mit einer dünnen Messerklinge die Bürsten seitlich wegdrücken und dann den Kommutator von der Seite "eindrehen". Dazu muss der Rotor ja nicht im Gehäuse sein.
Okey... das mit dem Angebot war nix... aliexpress hat den Verkäufer gesperrt, hab das Geld wiederbekommen. Aber JXD385 ohne Funke für ~15€: http://www.aliexpress.com/item/4-Colors-Free-Shipping-JXD-385-BNF-without-Transmitter-4CH-3D-Mini-Quadcopter-w-6-Axis/1805974928.html oder JXD388 ohne Funke: http://www.aliexpress.com/item/JXD-388-BNF-4CH-6-Axis-Gyro-MINI-RC-Quadcopter-Without-Transimitter-2-4GHz-with-LED/1718288442.html Have fun^^
Hat sich schonmal jemand getraut, die freie Firmware auszuprobieren? Wie isses? Abgesehen von den anfälligen Motoren ist das Teil für mich der optimale Büroflieger - nur das Aufladen müsste man mit einer Dockingstation automatisieren.. Als Sensor eignet sich der Wii Remote IR Sensor, der 4 IREDs tracken kann. Daraus lässt sich die relative Position berechnen. Der Sensor nutzt I2C und wiegt < 1 g (+ Oszillator). http://de.wikipedia.org/wiki/Wii-Fernbedienung http://wiibrew.org/wiki/Wiimote#IR_Camera Sind noch 2 Pins frei und etwas Flash? Dazu gibt es auch schon einige Papers und evtl. open source? https://www.google.de/search?q=wii+ir+camera+quadrotor+land Zum Docken dann ein (selbstzentrierender) Kegel mit Kontaktringen. Die on-board Elektronik müsste dann aber elektronisch vom Akku getrennt, oder so modifiziert werden, dass sie das Laden übersteht und nicht stört.
Hab leider kein Programmer um die Firmware zu flashen :( Ansonsten sind die Motren nicht anfällig! Also ich habe seit Dezember einen einzigen Motor gecrasht. Propeller kaufe ich inzwischen im 10er Pack. Also bin überrascht was der kleine ab kann! Als Lader verwende ich den iMAX B6 mit einem entsprechenden Kabel damit ich immer 3 Akkus zur gleichen Zeit laden kann. Habe 6 Akkus ;) Ein Bericht über einen umgeflashten Quad wäre echt Interessant.
Ich bin jetzt endlich dazu gekommen, die neue Firmware, den Bradwii-Port von Victor auszutesten. https://github.com/victzh/bradwii Er hat wirklich gute Arbeit geleistet. Die Firmware belegt im aktuellen Zustand nur 13kb Speicher - es ist also noch viel Platz für Weiteres. Das Projekt lässt sich mit Keil uvision 5 compilieren. Allerdings musste ich noch ein "-C99" compilerflag ergänzen, sonst gab es Fehlermeldungen. Nachdem ich ST-Link configuriert habe, konnte ich auch die Firmware uploaden. Das Binding mit der Fernbedienung funktioniert normal. Neu ist, dass man den Quadcopter "scharf" machen muss, in dem man beide Hebel nach unten recht bewegt. Die Motoren laufen dann in der niedrigsten Geschwindigkeit. Das Fliegen selbst funktioniert leider noch nicht sehr gut. Möglicherweise sind die Motoren unterschiedlich zugeordnet. Dabei scheint es Unterschiede zwischen den Mini54ZAN basierten Typen zu gehen. Werde noch versuchen das Problem zu lösen.
Osterhasi schrieb: > oder JXD388 ohne Funke: > > http://www.aliexpress.com/item/JXD-388-BNF-4CH-6-Axis-Gyro-MINI-RC-Quadcopter-Without-Transimitter-2-4GHz-with-LED/1718288442.html Der JXD 388 ist übrigens eine lahme Kröte - kann ich nicht weiter empfehlen. Der hier sieht interessant aus: http://www.aliexpress.com/item/WLtoys-V272-Velocity-2-4G-6-Axis-GYRO-Super-Mini-4CH-RC-Quadcopter-BNF-like-Hubsan/1830128325.html Und hier noch eine interessante kombination. Fehlt nur noch der Schwimmmodus: https://www.youtube.com/watch?v=KenU_a_uZtY
Und nach genau 1111 Posts fliegt er endlich mit eigener Firmware! Die Firmware von Victor ließ sich mit minimalen Änderungen auf dem JD385 zum laufen bringen. Hier ist das Repository des KEIL Projektes: https://github.com/hackocopter/bradwii-jd385 Das Projekt lässt sich mit der kostenlosen Version von KEIL µVision 5 compilieren. Hier die Anleitung zum flashen: https://github.com/hackocopter/JD385_Documentation Der PID-Controller ist in der aktuellen Version noch nicht optimal konfiguriert. Aber ansonsten fliegt der Quadrocopter wie mit der originalen Firmware. Es gibt aber noch viele Stellen an denen die Software noch optimiert werden muss. Jetzt sind alle Möglichkeiten offen! Wichtige Ergänzung: Mit der neuen Firmware fliegt der Copter nur nach "arming". Dazu muss man beide Hebel nach unten rechts bewegen.
Nabend. Habe mir auch mal einen Copter bestellt. Allerdings hat dieser das Problem, dass er nur kurz läuft und dann schnell Blinkt. Wenn ich nur ein wenig Gas gebe, fängt er nach ca. 1Sekunde an zu blinken. Wenn ich mehr Gas gebe dauert es länger. Wenn ich ihn festhalte und vollgas gebe, läuft er. Warum läuft er nur auf Vollgas? Die einzige Abweichung die ich zu den hier gelisteten Modellen finden kann, ist dass anstelle des Funk Empfänger Chips ein schwarzer Klecks sich befindet. In dem hier zur verfügung stehenden Schaltplan finde ich leider nicht woran das liegen könnte. Wäre sehr dankbar, wenn mir jemand helfen könnte. Sollte ich wichtige Informationen vergessen haben, bitte einfach bescheid sagen.
Hoffentlich kommt mein Ersatz bald. https://www.keil.com/demo/eval/arm.htm Ist "MDK-ARM Version 5.10" richtig? Gibt es auch einen FTP Server für den Download? Weiß jemand zufällig ob es in der Firmware eine Stelle gibt, an der man an "aufbereitete" Lagedaten einfach herankommt, oder gehen Sensorwerte direkt in die Regelung?
Hallöle: also meine sind heute gekommen: http://www.aliexpress.com/item/4-Colors-Free-Shipping-JXD-385-BNF-without-Transmitter-4CH-3D-Mini-Quadcopter-w-6-Axis/1805974928.html Hab mir 2 ohne Funke bestellt, tun einwandfrei und habe gerade gesehen sind nochmals im Preis gefallen: € 13,49. ST-Programmer ist letzte Woche schon gekommen, dann wird ich mir auch mal Bradwii flashen ;) @enttöuscht also ein vergleichbares verhalten haben meine nur wenn der Akku leer ist. sprich drehten noch und leds blinken schnell. Allerdings kann man dannach nicht mehr starten/fliegen! Ansonsten habe ich inzwischen 4 und fliegen alle 1A!
Um die FB neu zu flashen braucht man den Nuvoton Writer NWR-005. Den gibt es bei Atlantik Elektronik für €20.- . Dummerweise ist der Mindestbestellwert aber €400.- . Darunter gibt es €25.- Mindermengen Zuschlag. Ich würde einen NWR-005 kaufen. Möchte sich noch jemand an die Bestellung anhängen? Oder bestellt jemand regelmäßig bei Atlantik und würde mir das Ding mit bestellen?
Weiß jemand was in dem Empfänger aus diesem Set für ein IC drin ist? http://www.hobbyking.com/hobbyking/store/__8992__turnigy_9x_9ch_transmitter_w_module_8ch_receiver_mode_2_v2_firmware_.html Wäre cool, wenn man diese FB auch für den kleinen Copter nehmen könnte. Sie hat ja mehrere Modellspeicher...
Daniel schrieb: > Weiß jemand was in dem Empfänger aus diesem Set für ein IC drin ist? > http://www.hobbyking.com/hobbyking/store/__8992__turnigy_9x_9ch_transmitter_w_module_8ch_receiver_mode_2_v2_firmware_.html > Wäre cool, wenn man diese FB auch für den kleinen Copter nehmen könnte. > Sie hat ja mehrere Modellspeicher... Das wird mit dem Sender so einfach nix werden. Der Funkstandard ist ein anderer. Aber die DEVO funken können das Protokoll mit einer anderen Firmware: http://deviationtx.com/ Und so macht der spaß ;-)!
Auch ganz lustig: https://www.youtube.com/watch?v=-pmmC3SG5kA Kennt jemand nen guten Service wo man CFK Teile Fräsen lassen kann?
Hier ist ein Thread über den Hack-O-Copter auf RCGroups: http://www.rcgroups.com/forums/showthread.php?t=2174365 Dort ist etwas mehr los als hier. Man versucht jetzt, den Code auf den H4 zu portieren.
Übrigens unterstützt die neue Firmware MultiWiiconfig über den seriellen Port. Damit lassen sich alle Parameter des Quadcopters über eine GUI konfigurieren.
Moin, zwei Fragen: 1) Hat jemand eine passende Funke über und gibt diese günstig ab? Ich habe 3 dieser http://www.aliexpress.com/item/4-Colors-Free-Shipping-JXD-385-BNF-without-Transmitter-4CH-3D-Mini-Quadcopter-w-6-Axis/1805974928.html Mini Copter, aber nur einen mit Funke. 2) Ist die Flip Funktion eine Art Macro im Sender, der eine Reihe Befehle sendet, oder wird ein Befehl an den Copter gesendet und die FW im Copter steuert den Ablauf des Flips? Kann die Alternativ-FW den Flip? Danke und Gruß Nils
Hallo Nils zu 1. brauchst du noch eine Funke oder du hast schon eine? Also mit einer kannst du alle Modelle fliegen! Zu 2. der FlipMode wird über einen extra Kanal gesteuert. Wenn der Ruderausschlag auf 100% geht + FlipMode ON, macht das Teile die Flips. Im FlipMode OFF passiert nichts. Sprich: Die Flips macht der Copter nicht die Funke!
Octo schrieb: > zu 1. brauchst du noch eine Funke oder du hast schon eine? Also mit > einer kannst du alle Modelle fliegen! Sowohl als auch ;-) Ich habe 1 Funke und kann auch alle 3 Copter fliegen, aber eben nur einzeln. Hatte mir 2 ohne Funke zum Basteln und als Ersatz gekauft. Da die Copter aber so witzig sind, möchte ich gerne eine weitere Funke haben, damit ich mit jemandem zusammen fliegen kann... Es hörte sich hier im Thread mal so an, als wenn einige Leute ein paar Funken übrig hätten, da sie schon mehrere Copter verbastelt oder kaputt geflogen haben. Zu 2) D.h. die Alternative-FW kann die Flips nicht?
1.) Ok, verstanden. Hatte 2. Funken habe aber eine geschlachtet um an das Funkmodul zu kommen. Kann dir da leider nicht weiterhelfen 2.) Korrekt. Wobei Tim an dieser stelle bessere Informationen bieten kann...
Octo schrieb: > 1.) Ok, verstanden. Hatte 2. Funken habe aber eine geschlachtet um an > das Funkmodul zu kommen. Kann dir da leider nicht weiterhelfen Ich bekomme jetzt von Tim eine Funke im Tausch gegen die Attinys :-)
Nils Nachname schrieb: > Octo schrieb: > Zu 2) D.h. die Alternative-FW kann die Flips nicht? Wenn das Teil vernünftig fliegt braucht man dafür aber auch kein Makro. Ist nur etwas Übung...
Jain, also das Ding macht richtig Spaß auch ohne Flips. Die Flips sind ganz nett zum posen... Allerdings lässt sich der Copter maximal um ca. 45° kippen. Genial wäre natürlich in "frei" fliegen zu können. Also der kleine den du gepostet hast ist ein anderer, habe ich auch. Ist aber nur noch für Innenräume geeigent.
Robert Knipp schrieb: > http://www.aliexpress.com/store/product/free-shipping-ufo-vs-HUBSAN-NANO-Q4-H111-The-world-s-smallest-4CH-remote-control-toys/1093640_1859612633.html?spm=5261.7049941.1997368589.417&promotionId=253311003 Ist das denn kompatibel?
Hallo ich meine der hier ist der Clone von JXD: http://www.rcmaster.net/de-jxd-395-4ch-6-axes-nano-quadcopter-rc-2-4ghz-rtf-p237014.htm Meist sind die Funken der hersteller kompatiebel, also die JXD 385 nutzen das v2x2 Funkprotokoll. Könnte also auch mit dem JXD 395 funktionieren.
Ach und wer sich schon Akkus mit dem mitgelieferten "Lader" zerstört hat, wird dieses kleine Platinchen sicherlich lieben: http://www.ebay.de/itm/LiPo-Charger-Basic-Micro-USB-3-7V-Battery-Charger-module-/321149954122?pt=LH_DefaultDomain_0&hash=item4ac607684a
Ist das der gleiche Quadcopter, den es gerade bei Heise für ein Miniabo zu 16,50€ als Prämie bekommt, angeblich "SYMA X4"? http://www.mydealz.de/35435/6x-ct-z-b-quadrocopter-fuer-1650e/
Eher nicht: - das "Original" hatte keinen Rotorschutzring - andere Rotorenform - andere Gehäuseform, anderes Design Die einzige Gemeinsamkeit scheint zu sein, dass es sich bei beiden um Quadrocoptern handelt :P
Kennt jemand dieses model und oder weiß welcher Controller drauf ist? http://www.rcmaster.net/de-yizhan-x4-6-axis-gyro-rc-quacopter-with-lcd-transmitter-p237412.htm
Martin S. schrieb: > Die einzige Gemeinsamkeit scheint zu sein, dass es sich bei beiden um > Quadrocoptern handelt :P Naja, ein anderes Gehäuse zu gießen ist ja nicht das Problem. Aber vermutlich hat mich das »Hubsan X4« vs »SYMA X4« auf die Idee gebracht.
Also im Zweifel scheint die Elektronik der ganzen China-Quadkopter immer noch sehr ähnlich zu sein. Bisher gab es noch keinen Komplett-Reinfall.
Angehängte Dateien:
-

qcframe.jpg
95 KB -

qcframe_back.jpg
97 KB


Nachdem mir das Original Gehäuse immer wieder an den Armen bricht und auch kleben nur bis zum nächsten Crash hält, habe ich mir mal einen Rahmen aus FR4 für den kleinen gefräst. Das ganze ist einfach in Sandwich-Bauweise zusammen gesetzt. Ist glaube ich 1,5mm starkes FR4, also so wie Platinen-Material. Die Motoren sind mit Sekundenkleber eingeklebt (ist natürlich nicht ganz optimal). Der Rotor-Abstand ist etwas kleiner als beim Original-Gehäuse. Ist eventuell etwas wendiger, kann es noch nicht richtig beurteilen. Fliegen tut er mit dem neuen Rahmen sehr gut und liegt ruhig in der Luft. Mit dem original Gehäuse kommt es zum Teil zu Vibrationen, da die Arme nicht steif genug sind. Gewicht ist gegenüber dem Original um 1 Gramm leichter. Man könnte jetzt noch in der Mitte ein paar Ausfräsungen setzen und Carbon anstatt FR4 nehmen. Eventuell reicht aber auch eine Platte aus, da muss man nur die Motoren irgendwie gerade bekommen (evtl. kleine Hülsen um die Motoren, welche mit der Platte verklebt sind).
Ich würde mal nach aktuellen Erfahrungen mit dem "tmart" fragen. Zuächst wurde ich 1,5Monate hingehalten, und nun ist auch nach über einer Woche die neue Trackingnummer der Post noch immer nicht bekannt. Sind eure Teile bisher immer angekommen?
Michael D. schrieb: > Zuächst wurde ich 1,5Monate hingehalten, und nun ist auch nach über Bei was? Hast Du vorher schon einmal in China bestellt? > einer Woche die neue Trackingnummer der Post noch immer nicht bekannt. > Sind eure Teile bisher immer angekommen? Ja.
Michael D. schrieb: > Sind eure Teile bisher immer angekommen? Ich habe fast immer über Alibaba bestellt und nie Probleme gehabt. Die Lieferzeit variiert stark, zwischen 2 Wochen und fast 10 Wochen. Ein nicht unerheblicher Teil davon geht aber für die Strecke "Ankunft in Deutschland - Zoll - Auslieferung" drauf. 4 Wochen Lagerzeit im Zoll sind nicht ungewöhnlich. In einem Fall habe ich nach 60 Tagen Wartezeit reklamiert. Das Geld war innerhalb von 24 Stunden wieder da. Die Ware kam dann eine Woche später doch noch.
Tim schrieb: > Bei was? Hast Du vorher schon einmal in China bestellt? Ja habe bereits vorher in China bestellt gehabt, aber noch nie solche Probleme gehabt. Maximale Lieferzeit war bsiher immer 1Monat.
@Martin Sehr schöne Lösung! Hab da grad auch grad etwas konstruiert, allerding möchte ich die Motoren klemmen. Man weiß ja nie. Bin grad auf der Suche nach einer günstigen Möglichkeite 0.8mm CFK Fräsen zu lassen. Kennt jemand einen Service mit bezahlbaren Preisen bei guter Qualität?
Octo schrieb: > @Martin > > Sehr schöne Lösung! Meinst du mich? Wenn ja, danke :-) Octo schrieb: > die Motoren klemmen Und wie willst du das anstellen? Octo schrieb: > Kennt jemand einen Service mit bezahlbaren Preisen Also wir haben bei uns eine CNC in der Firma, die ich halt genutzt habe. Sollte auch CFK können (sagen zumindest die Kollegen). Ich habe mir eine 0.8mm Platte bestellt. Wenn du willst, kann ich deins mit fräsen oder so. Zeigst mal deine Konstruktion?
Angehängte Dateien:
-

minicopter1.jpg
260 KB -

minicopter2.jpg
380 KB

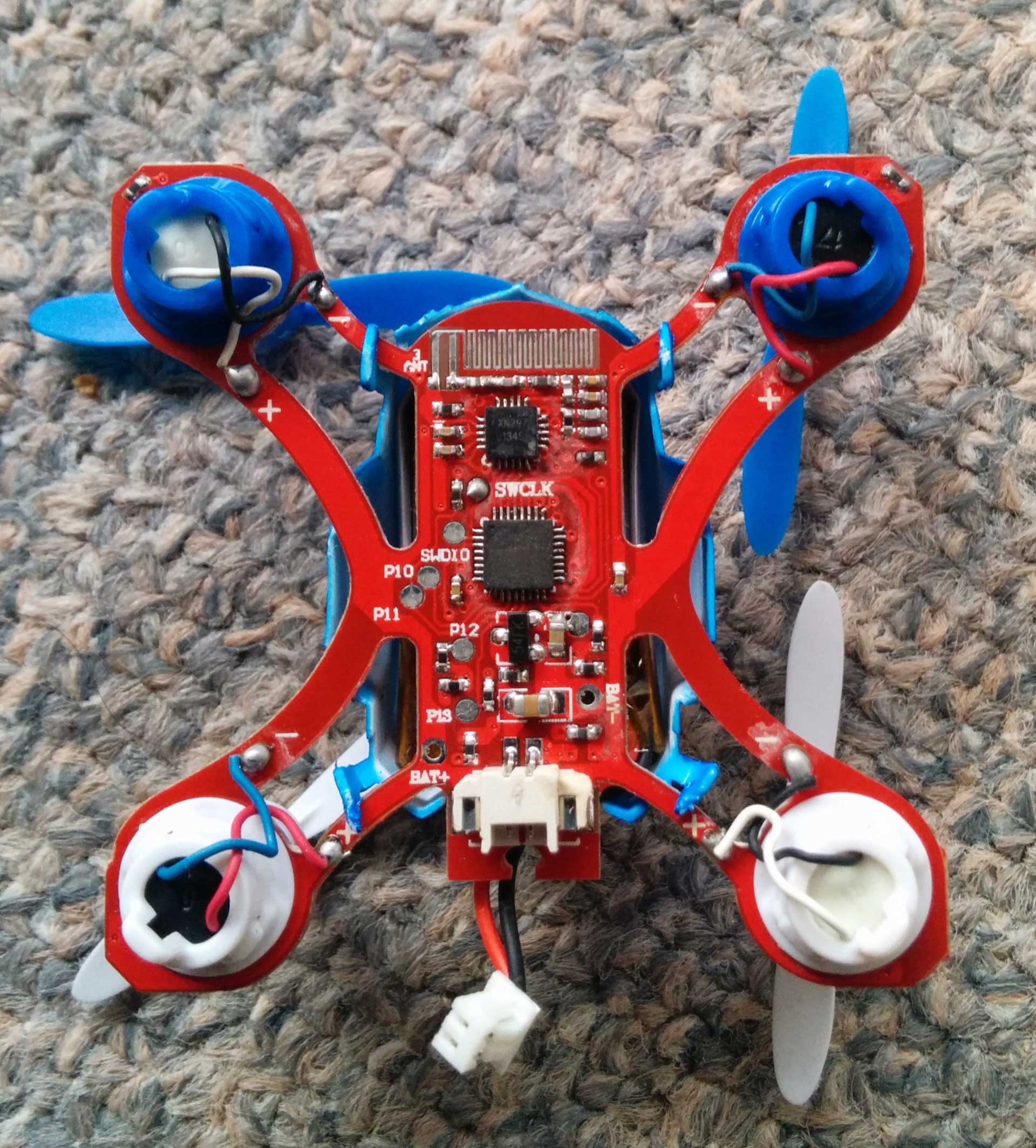
Robert Knipp schrieb: > http://www.aliexpress.com/store/product/free-shipping-ufo-vs-HUBSAN-NANO-Q4-H111-The-world-s-smallest-4CH-remote-control-toys/1093640_1859612633.html?spm=5261.7049941.1997368589.417&promotionId=253311003 > > $12,50 für 24h Habe heute ein unerwartetes Geschenk mit der Post bekommen (Ist ja schon so lange her...). Bilder anbei. Ist ein lustiges Ding, allerdings etwas träger als der JXD385. Am Design gibt es deutliche Unterschiede - alles ist ein bischen mehr Kostenoptimiert. Als RF-Transponder kommt ein anderer nRF24L01-Clone zum Einsatz, ein XN297. Der Controller wird vermutlich wieder ein Mini54ZAN sein, auch wenn die Kennzeichnung entfernt wurde. SWD ist herausgeführt. Der Intertialsensor befindet sich wohl auf der anderen Seite der Platine, wahrscheinlich wieder ein MPU6050. Leider kann man das Gehäuse nicht entfernen, ohne es zu zerstören. Für 9.50 EUR ungeschlagen im Preis/Leistungsverhältnis, aber nicht sehr hackerfreundlich...
Ähnelt dem von Revell. Nur das der von Revell um einiges mehr kostet. Aber deiner steht doch bei Ali für 35$, wie sind es dann 9,50 € geworden?
Mathias O. schrieb: > Aber deiner steht doch bei Ali für 35$, wie sind es dann 9,50 € > geworden? Als Robert den Links gepostet hat, gab es ihn für 50% off. Habe das Gehäuse übrigens doch aufbekommen. Auf der anderen Seite ist ein MPU6050, vier FETs als Motortreiber und ein LDO.
mahlzeit! bin recht neu hier, aber habe mich hier komplett durchgelesen...lustige truppe, nette ideen, aber irgendwie kam noch keiner auf die idee die mir die ganze zeit vorschwebt (wo das teil gerade nicht so gut schwebt ;-) ): den quadrocopter vergößern! d.h. die platine wird von den motoren befreit und die ausgänge der motoren werden zu einer steuerplatine um-geleitet an der sich zB normale brushless regler und motoren befinden. dann hätte man doch VIELE möglichkeiten den copter zu erweitern (gps, so ziemlich jede cam, parkplatz-finder, fpv, und was euch sonst noch in den sinn kommt/kam). leider habe ich lediglich ein einfaches multimeter, aber irgendwer hat doch sicher mal gemessen, was die motoren antreibt!? der PWM ausgang wird doch sicher mit xx kHz oder so beschaltet sein, mit der dann die motoren schneller oder langsamer laufen? just-my-2-cent gruß Kevin PS: ich fliege seit einem jahr den copter und habe nach zig rotorblättern den ersten motor auf dem gewissen. ;-)
habe heute mal meine Anleitung gescannt und in eine PDF geworfen, wenn die im wiki verlinkt werden soll/darf würde ich es machen oder einer von euch gründervätern macht das https://dl.dropboxusercontent.com/u/15577728/jd-385_manual/A5_manual.pdf
Moin. Also ich hab jetzt nicht alles hier gelesen, aber kann es sein das es keine Umstellung auf Mode 1 oder Mode 3 gibt??
Hallo allerseits, der Thread ist ja schon ein bisschen älter, trotzdem bin ich darauf gestossen weil wir für ein Uni-Projekt eine große Anzahl Mini-Quad mit openSource Firmware suchen. Der JD-385 mit bradwii-jd385 wäre da wohl ideal. Ich habe meine ersten beiden Quadcopter (JD-385) gelöscht und neu programmiert (download von https://github.com/hackocopter/bradwii-jd385); das ging recht problemlos. Einzige "Änderung": in Keils MDK -> Project -> Option-for-Target->Device->"Legacy Device Database [no RTE]". Allerdings kann ich mit dem neuprogrammierten Copter nicht per Fernsteuerung kommunizieren (meine Fernbedienung zeigt keine Reaktion). Nach Power-Up dauert es nun ca. 4 Sekunden bis die blauen LED angehen; dann signilisieren die LEDs die "Stabilität". So weit, so gut. Und wie weiter? Wie kann ich fliegen? Wenn ich jetzt meine Fernbedienung "binden" will (nach Einschalten linken Steuerknüppel "hoch und runter") weiss ich nicht ob das funktioniert (keine Rückmeldung vom Copter); wenn ich danach "armen" möchten (beide Steuerknüppel nach rechts unten) passiert gar nichts. Auch sonst keine Reaktion vom Quadcopter. Was mache ich falsch? Verstehe ich etwas nicht? Brauche ich eine andere Fernbedienung? Die "vorhandene" funktionierte vor dem Neuprogrammieren einwandfrei und läuft immernoch mit "Quad Nummer #3 (der NICHT neu programmiert wurde). Nur die zwei Quads auf die ich "bradwii-jd385" gespielt habe reagieren nicht auf meine Fernbedienung. Ich habe auch andere Fernbedienungen (V2x2 Protokoll) probiert; selber Effekt: vorher einwandfrei, danach nicht mehr. Ist die Software im repo "lauffähig"? Wer kann mir helfen??? Danke sehr! Grüße, Jörg
Hallo Leute, ich weiß ja nicht ob es noch jemanden interessiert oder schon bekannt ist. Aber ich habe bei Versuchen mit der Fernbedienung noch etwas festgestellt. 1. Der Schub lässt sich immer bis auf ff drehen, egal welche Geschwindigkeit eingestellt ist. 2. Auch auf voller Geschwindigkeit (Stufe 3) gehen Roll+Pitch nicht bis auf ff hoch, sondern bleiben deutlich darunter (kann mich an den genauen Wert nicht erinnern). Auf Yaw hab ich nicht geachtet, werde ich aber noch nachholen. 3. Wenn der Flip Button gedrückt wird, wird das Flag auf 04 gesetzt und Roll+Pitch können Vollausschlag (ff) annehmen. Wie es bei Yaw aussieht werde ich noch nachreichen, falls überhaupt Interesse besteht. VG Christopher
Mit bradwii muss erst "gearmed" werden. Beide hebel nach unten rechts? Bin mir nicht mehr sicher. Am besten auch den rcgroups thread lesen. Sorry, habe gerade kein inet...
Danke für die schnelle "Vorab-Antwort" zu meinem Flugproblem. Das "armen" mache ich wie im Wiki beschrieben (beide Steuerknüppel nach rechts-unten --- nach dem "binding"); leider zeigt das keine Reaktion. Gibt es sonst noch einen "Trick" zum Starten? Und/oder kann mir jemand ein "fertiges" Firmware file (compiliert) von dem bradwii-jd385 - Projekt senden (hier als Anhang?)? Dann weiß ich zumindest, dass die Firmware auf dem Quad richtig ist und kann mit meiner Fernbedienung weiter experimentieren (wenn ich mit der FW das gleiche Verhalten sehe). Aber vielleicht mache ich ja auch beim Compilieren (im Keil IDE) etwas falsch, das könnte ich dann ansehen wenn "die andere" Firmware geht; meine aber nicht. Danke sehr! Freue mich auch weitere Vorschläge; bin gerne bereit das sofort auszuprobieren. Wer benutzt denn die Firmware "ohne Probleme"??? Auch mit einem "aktuellen" Keil - IDE? Danke, Jörg
Danke sehr! Habe ich jetzt ausführlich durchgelesen (nicht jedes Wort, aber doch jeden Beitrag)... hilft nicht weiter. Das "armen" mache ich wie beschrieben. Leider reagiert der JD-385 "gar nicht" - also ich kann keine Änderung erreichen. Ab wann sollte ich denn etwas sehen? Also z.B. anderes Blinken der LED und/oder Motorenbewegung? Erst nach dem "armen"? Kann ich feststellen, ob die Fernbedienung angebunden ("binding") ist?? Oder kann mir jemand der Mitlesenden sein Binary der Firmware geben? Es könnte ja sein, dass mein Compiler etwas falsch übersetzt... keine Ahnung... Freue mich auf weitere Tipps! Danke sehr! Jörg
Hi, hast du mal probiert die Fernbedienung zurückzusetzen? ICch weiß gerade nicht wie das geht (aber es geht). Vielleicht sind bei dir die Mittelpunkte zu weit oben oder links und er erkennt es nicht als ganz unten rechts.
Christopher B. schrieb: > Fernbedienung zurückzusetzen Es wäre nett, wenn du bei Gelegenheit erkunden würdest, wie das geht und es hier posten würdest. In der Anleitung finde ich nämlich keinen Hinweis darauf.
Ich glaube du musst eine der beiden Schultertasten gedrückt halten beim einschalten. Die Fernbedienung müsste dann kurz anders piepsen. Jetzt wo ich nochmal darüber nachdenke, kann es auch sein, dass das bei der Fernbedienung vom V911 so war. Aber du kannst die ja auch so auf Mittelpunkt stellen, einfach so lange auf den Verstellknöpfen drücken bis es einmal länger piept. Zum Beispiel YAW erst ganz oft nach links drücken, wenn es piepst, bist du in der Mitte, wenn nicht, dann eben ganz oft nach rechts drücken. Irgendwann muss es länger piepsen und dass ist die Mitte. LG Christopher
Meinst du die Trimmung? Unter "Rücksetzen" verstehe ich etwas anderes.
Ja klar die Trimmung, was willst du sonst ab der Fernbedienung verstellt haben? Zumindest meine bietet nicht allzu viele Einstellungen... Und wenn du wegen der Trimmung nicht den im copter eingesehen Arm-Wert erreichst dann laufen die Motoren nicht an.
Hallo! Danke sehr! Habe meine Fernbedienung überprüft (FernedienungEN --- ich habe 4 verschiedene die alle "vor" der Custom-Firmware liefen); an einer verstellten Mittellage / Trimm liegt es nicht. Irgendwo anders muss "der Wurm drinsein". Also wie geschrieben kann ich compilieren, dann flashen und der Quadcopter zeigt "Lebenszeichen": Nach etwa 4 sek gehen die Lichter an; danach wird eine "Stabile Lage" durch die LEDs angezeigt. Software läuft also soweit. Aber dann... meine Fernbedienung kann keinerlei Reaktion hervorrufen. Sollte ich nach dem "binden" etwas sehen? Nach dem "armen" sollen die Motoren angehen; tun sie aber nicht. Was sollte ich am JD-385 noch beobachten? Kann mir jemand bitte eine funktionierende "bradwii-jd385" Firmware senden? Dann kann ich die Flashen und zumindest das Problem eingrenzen. Oder erinnert sich wer an "seltsame" Einstellungen im Keil-Compiler? Ich nutze einen ST-Link V2 (aber das Programmieren geht ja). Danke, Jörg
Hallo, Wenn du eh selber übersetzt, dann versuch doch mal in der Datei rx_v202.c in der Funktion set_bound die led aus zu schalten und danach in eine endlos schleife zu gehen. Dann weißt du ob die Verbindung zustande kommt. Ich werde nächste Woche mal bradwii ausprobieren. Kann am Wochenende nicht. Ist dann mein letzter jd-385... mein zweiter ist meiner Verlobten abhanden gekommen. Der flog so hoch dass ich ihn dann nichtmehr sehen konnte als sie mir im Panik die Fernbedienung wieder gab ;-D
Hallo ich nochmal, hast du deinen Transmitter auf Geschwindigkeit 3 eingstellt? Also nach dem Binden zweimal die Schultertaste oben links gedrückt? LG Christopher
Oha... nein, habe ich nicht. Typischer Anfängerfehler. Ich kann das leider erst am Mittwoch prüfen (bin unterwegs); melde mich dann aber gleich nochmal. Sorry wenn es wirklich das ist... klingt aber schon so, dass er ohne "volle Geschwindigkeit" eben auch das "arming" nicht hinbekommt... Sorry!!! Ich melde mich am Mitwoch...
Jorg C. schrieb: > ohne "volle Geschwindigkeit" eben auch das "arming" > nicht hinbekommt... Bei mir bindet er sich auch in Stellung "Anfänger" (Original Soft).
Georg G. schrieb: > Jorg C. schrieb: >> ohne "volle Geschwindigkeit" eben auch das "arming" >> nicht hinbekommt... > > Bei mir bindet er sich auch in Stellung "Anfänger" (Original Soft). Ja er Bindet. Nur bei der Originalsoftware musst du den Copter nicht "Armen". D.h. er fliegt automatisch los sobald du gas gibst. Bei Bradwii drehen die Motoren aber schon auf Nullstellung wenn er "gearmt" ist. Christopher B. schrieb: > Wie es bei Yaw > aussieht werde ich noch nachreichen, falls überhaupt Interesse besteht. Also ich habe das gestern nochmal probiert. Ja, bei YAW ist es genauso wie beschrieben, dass solange der "Flip-Button" gedrückt gehalten wird die Achsen bis zum Vollausschlag aussteuern. Ich arbeite gerade an einem "Repeater" der a) einen Empfänger darstellt und die Daten der Originalfernbedienung verwendet und b) einen Sender simuliert der die von der Fernbedienung empfangen Daten weiterreicht, bloß ohne das Flip-Flag. Mich interessiert wie der Copter sich verhält wenn die Achsen in Vollaussteuerung gehen, aber das Flip-Flag nicht gesetzt ist.
Danke --- Jetzt kann ich mit der "Custom-Firmware" einwandfrei fliegen. Es lag tatsächlich daran, dass in der "Default"-Einstellung das Arming (rechts-unten) nicht ging. Jetzt läuft es wieder. Vielen Dank nochmals an alle die mir geantwortet haben! Jörg
Hallo Jörg, freut mich dass es jetzt geht. Kannst du jetzt die vorkompilierte Firmware hier reinstellen? Dann brauch ich mir nicht Keil installieren um das zu übersetzen, wäre echt nett. lg Christopher
klar, hier ist eine compilierte Version der JD385-bradwii firmware. Allerdings nutze ich das Keil-IDE trotzdem um die Firmware auf den Copter zu übertragen (flashen). Keine Ahnung ob es dafür auch andere Tools gibt. Viel Erfolg! Jörg
Hier hat sich einer richtig viel Mühe gegeben und alles erklärt: http://www.rcgroups.com/forums/showthread.php?t=2278850 Respekt!
Hi! Hat jemand schonmal folgendes Problem erfolgreich gelöst: Der Copter resettet sich bei viel/schnell Schubgeben. Wenn ich ganz langsam abhebe geht es, aber ab und zu resettet er sich in der Luft. Gebe ich zu beginn schub crasht er sofort. Akku ist ein neuer dran (an nem anderen getestet) und ich hab auch gestern 4 neue Motoren eingebaut. Immer noch dasselbe Problem... Das ist echt ärgerlich :( Danke & Gruss, Simon
Hallo Simon, erfolgt das ganze mit der Stock Firmware oder mit Bradwii? Ansonsten wie alt sind deine Akkus? Bringen diese noch den notwenigen Spitzenstrom? Ich musste auch schon Motoren ersetzten, allerdings weil die verschlissen waren und keinen richtigen Schub mehr erzeugt haben. Beim Fliegen selbst hatte ich noch nie Probleme.
Angehängte Dateien:
-

W52bDU3.jpg
430 KB

Es gibt Wettbewerb für JXD. Der Cheerson CX10 kostet nur 15 EUR: http://www.eevblog.com/forum/reviews/teardown-cheerson-cx10-mini-quadcopter/ Tear down: http://www.eevblog.com/forum/reviews/teardown-cheerson-cx10-mini-quadcopter/ Interessant ist, dass dieses mal ein microcontroller von ST zum Einsatz kommt.
Angehängte Dateien:
-

IMG_5372_2.jpg
810 KB -

IMG_5373_2.jpg
640 KB
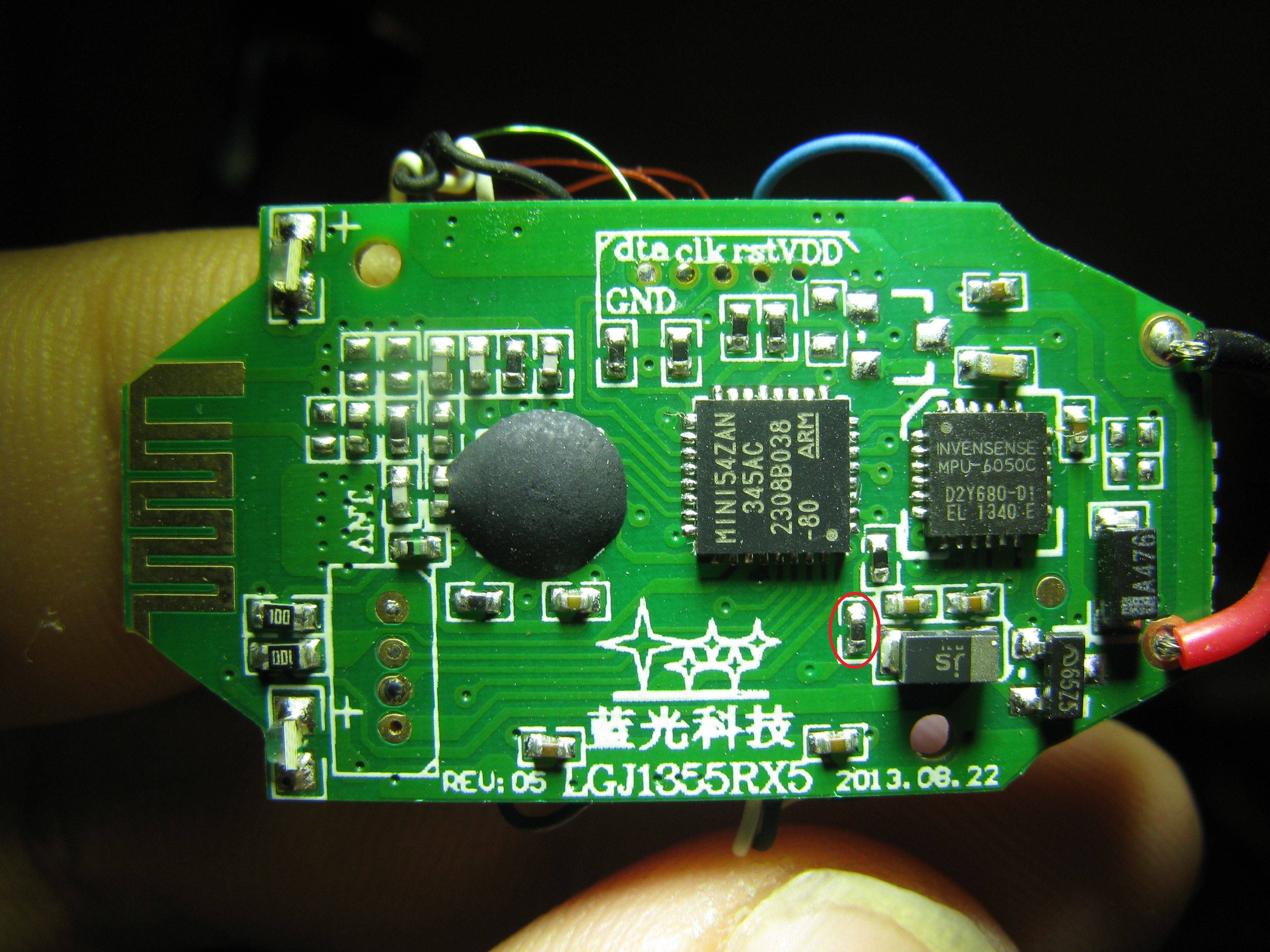
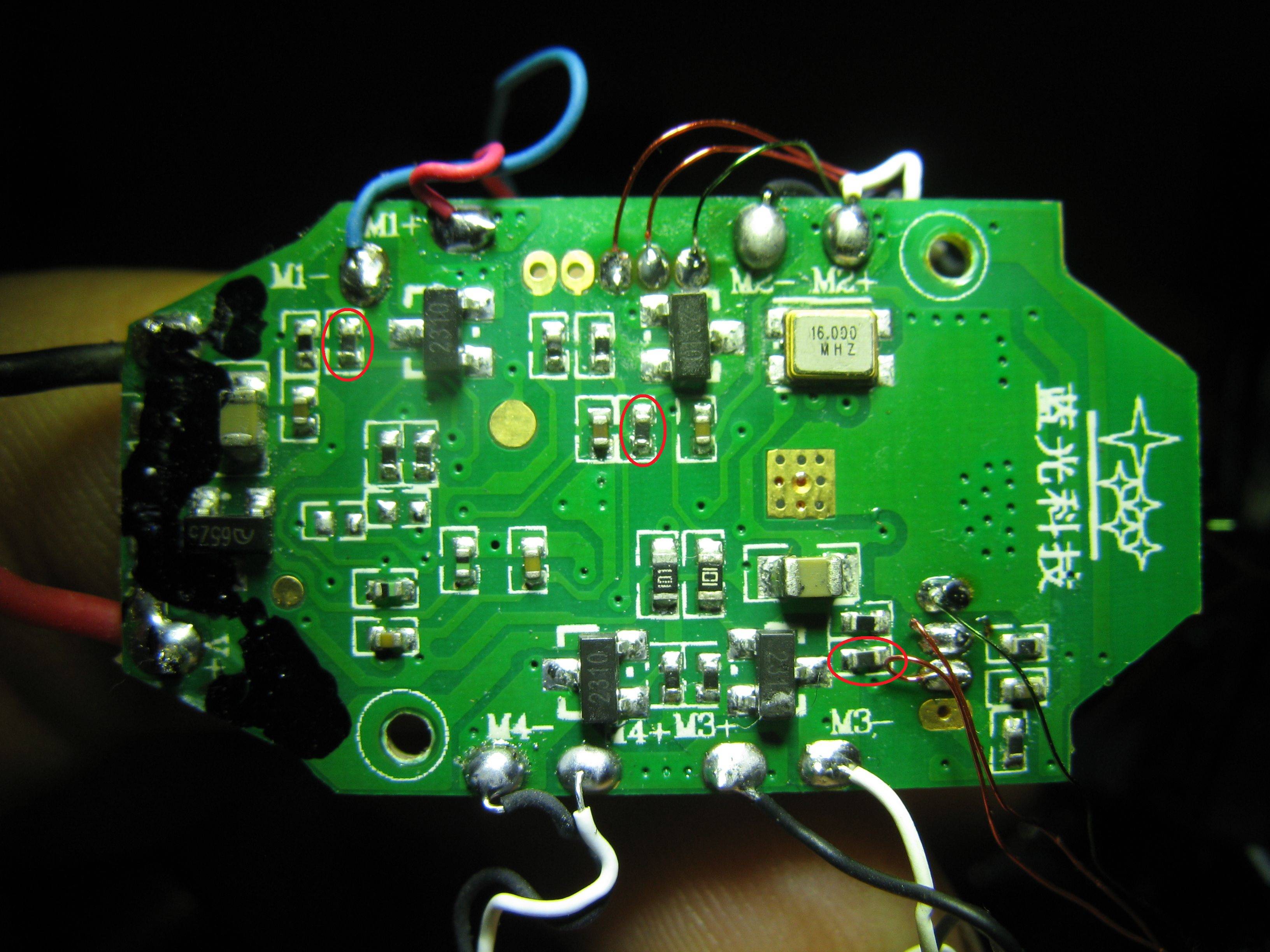
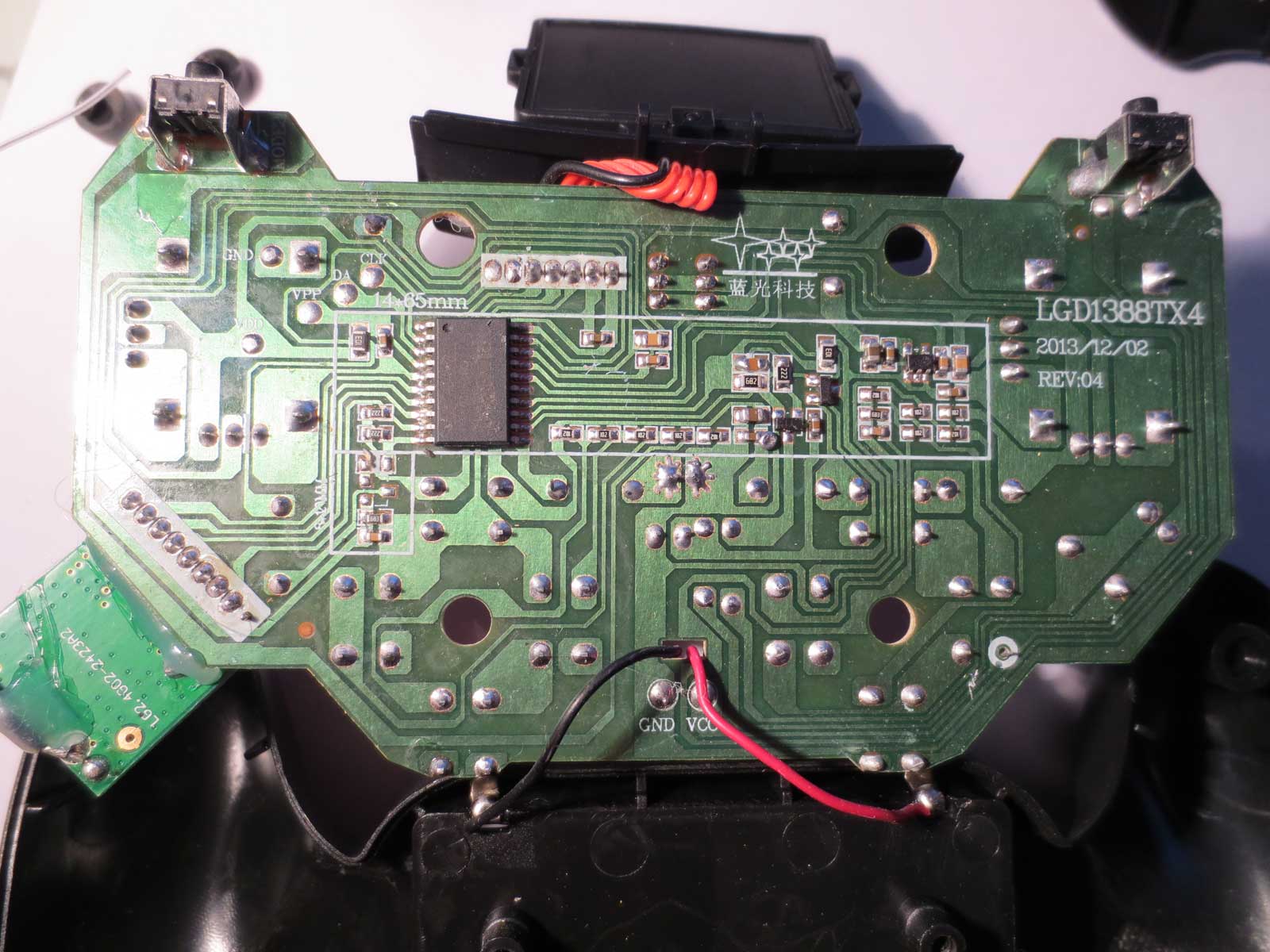
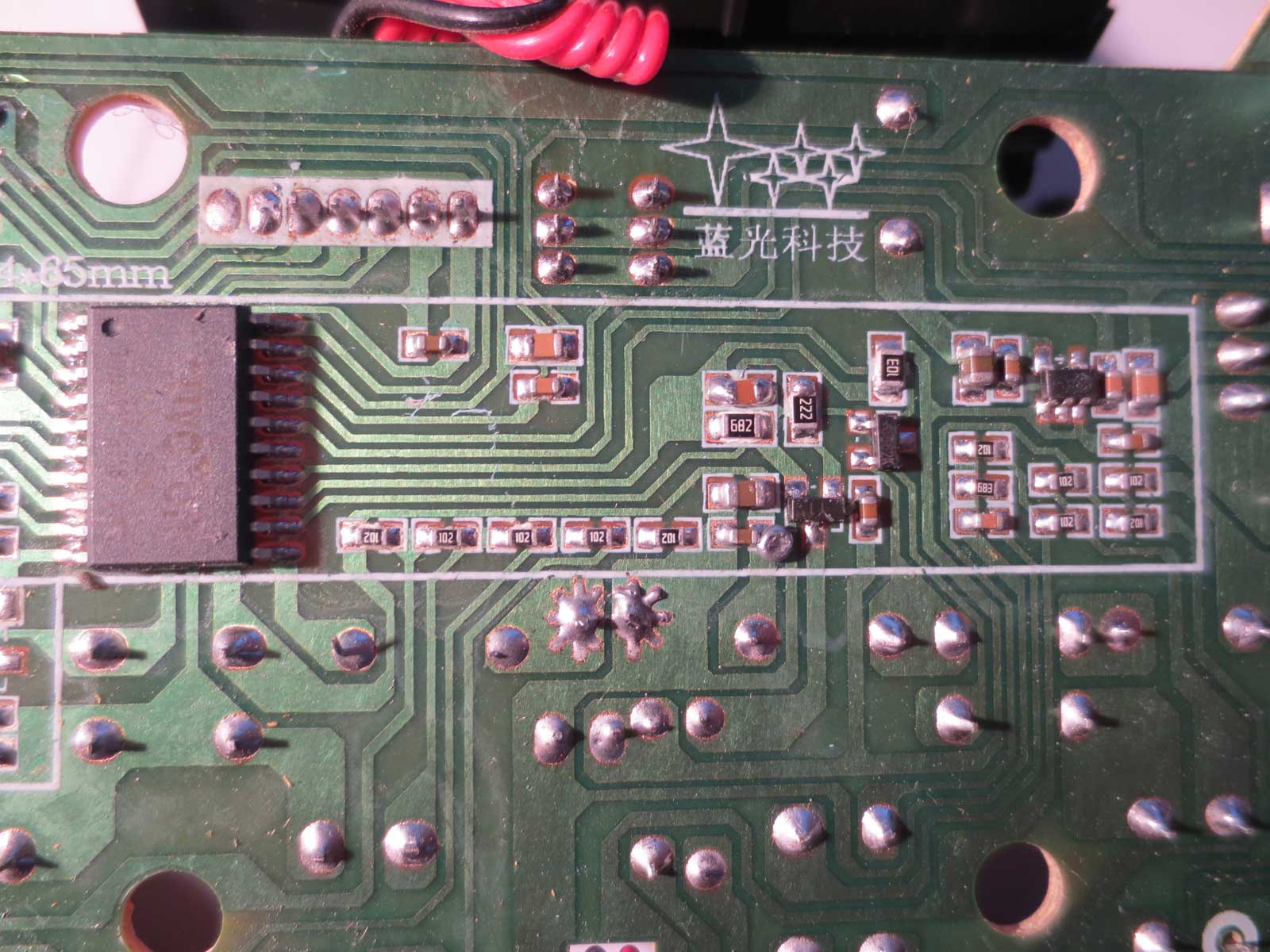
Hallo Zusammen, ich habe gerade ein wenig Zeit und beschäftige mich wieder aktiv mit dem kleinen. Nachdem ich die letzte Zeit nur gefolgen bin. Hierbei ist mir aufgefallen, dass es für den JXD 385 eine weitere Hardware gibt. Die von Tim Eingangs gepostet ist REV:02 vom 2013-06-27 Ich habe hier noch die REV:05 vom 2013-08-22 Auffällig hierbei die Bestückung des Funkchips direkt auf der PCB mit Epoxy vergossen und der ?Widerstände? welche zu den ?Analogeingängen? des Controllers gehen. Damit stellt sich mir allerdings die Frage wie bei REV:02 die Batteriespannung überwacht wird?
Nochmal zum Ladegerät: Ich habe 3 etwas stärkere Akkus gekauft. Zwei davon sind jetzt wohl defekt, der Kopter geht nach gut 30 Sekunden zu Boden. Beim Laden habe ich jetzt tatsächlich 5V an den Akkus gemessen! Die LED des USB-Laders leuchtet dunkel vor sich hin, Strom noch gut 80mA. Also unbedingt eine andere Lösung zum Laden verwenden!
Hallo Chris, ja ist leider so! Die Ladegeräte die dabei sind tötlich für die Akkus! Ich habe Ladegeräte und alle sind gleich: - Ester ProtoX - WLtoy V272 - JXD 385 - JXD 388 Habe die Kabel alle abgeschnitten und durch einen JST-Stecker angelötet. Jetzt kann ich mit dem iMAX B6 Laden oder mit diesem kleinen Platinchen: http://www.ebay.de/itm/371204483020
Tim schrieb: > Es gibt Wettbewerb für JXD. Der Cheerson CX10 kostet nur 15 EUR: > > http://www.eevblog.com/forum/reviews/teardown-cheerson-cx10-mini-quadcopter/ > > Tear down: > http://www.eevblog.com/forum/reviews/teardown-cheerson-cx10-mini-quadcopter/ > > Interessant ist, dass dieses mal ein microcontroller von ST zum Einsatz > kommt. Sehr interessant, mal ein Teil mit vernünftigem MCU :)
Hallo Zusammen, beschäftigt sich noch jemand mit dem Quad? Ich versuche immernoch eine Rückmessung der Batteriespannung hin zu bekommen. Allerdings finde ich keinen "vernünftigen" Punkt wo ich die Batteriespannung mehr oder minder stabile abgreifen kann. z.b. P1.5 geht auf AIN5, in Rev05 gibt es hier auch einen Spannungsteiler der auf ~4V Eingangsspannung 0,3V am P1.5 anliegen lässt. Allerdings fällt diese Spannung beim Fliegen auf nahezu 0V ab, ist also unbrauchbar. Darüber hinaus ist mir aufgefallen, dass 2 Spannungsregler verbaut sind! Einer auf der Vorder und einer auf der Rückseite! Hat schon jemand eingefangen einen Schaltplan zu reichnen? Ansonsten werde ich mich mal an die Arbeit machen, und sehen was ich dabei heraus bekomme.
B. G. schrieb: > Hat schon jemand eingefangen einen Schaltplan zu reichnen? Welchen Quadcopter meinst du? Für den JD385 findest du alles auf Github, steht weiter oben im Thread.
Hallo Georg, ja ich meinte den JD385. Sry, der Thread ist inzwischen recht lang und unübersichtlich geworden. Ich habe nur deinen Schaltplan der Funke gesehen. Dann werde ich mal deinen Schaltplan des Kopters erweitern... Hat jemand eine Idee für was der 2. Spannungsregler sein kann? Ref. Spannung für den ADC?
B. G. schrieb: > Hat jemand eine Idee für was der 2. Spannungsregler sein kann? Ref. > Spannung für den ADC? Siehe Schaltplan... der Entwickler war nicht allzu helle.
Hallo Georg, wir reden jetzt beide von diesem Schaltplan (link) und dem JXD385 Quad und nicht von der Funke? https://github.com/hackocopter/JD385_Documentation/blob/master/Quad%20Hardware/Circuit%20Diagrams/Copter00.pdf Stehe wohl grad ein wenig auf dem Schlauch...
Ich glaube da fehlt in der Tat der zweite Spannungsregler. Ich bin mir aber auch nicht sicher, welchen Zweck der erfüllt.
Sorry, ich war gedanklich auch bei der falschen Platine. Aber auf "meiner" Copter Platine ist kein zweiter Spannungsregler zu finden. Wo sitzt der? Foto?
Da hättest Du besser den Hubsan X4 mit Kamera bestellt - die Qualität der Aufnahmen ist eigentlich ganz ok. Denke daran, daß "oben" immer mehr Wind weht als unten und daß es nicht so einfach ist, wenn die Orientierung des Quadrocopters nicht mehr mit der eigenen Ausrichtung übereinstimmt - also Obacht bei Drehungen in luftiger Höhe!
Rüdiger schrieb: > "oben" immer mehr Wind weht als unten Imho ist der Zwerg für draußen nicht geeignet. Ich habe es einmal abends an einem windstillen Tag versucht. Am Boden war es wirklich windstill. Aber in 5m Höhe hat es den Copter in Sekunden Schnelle 30m weit weg geweht - mit Bruchlandung und einem defekten Motor. Um die Orientierung zu erleichtern, sollte man vielleicht eine rote und eine grüne LED an den Seiten anbringen.
Hier sind die Bilder: Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter" Bei den Akkus Pads befinden sich sowohl auf der Vorder als auch auf der Rückseite ein Bauteil im SOT-23 Gehäuse mit dem Code "65Z5" Bei beiden liegt an Pin 3 die Akkuspannung und an Pin 2 3.0V...
Guten tag , habe den mould king x6 "china quadcopter" und bekomme keine verbindung zur Remote mehr hin, die leds blinken gleichzeitig und weiß nicht was zutun, vielleicht weiß jemand was. mfg
Mahlzeit @tobias schu ! Dein "mould king x6" ist nicht der hier besprochene Quadcopter, ich bezweifle dass hier jemand helfen kann. Allerdings habe ich bei verschiedenen Modellen eine Gemeinsamkeit gesehen: 1. Funke an (Gas UNTEN) 2. Akku im Quadcopter anschließen 3. Gas hochschieben (zumeist blinken Quadcopter und Funke irgendwann syncron) 4. Gas wieder runter 5. fliegen...
Angehängte Dateien:
-

3_copter_mit_Netz.jpg
69 KB
Ich habe mich jetzt lange nicht mit "den Kleinen" beschäftigt, aber dieses Video ist wieder eine Inspiration: https://www.youtube.com/watch?v=w2itwFJCgFQ#t=153 Ein paar reflektierende Kugeln wiegen nix und so ein Netz (Bild) auch nicht. Die rote Linie ist die Flugbahn der Kugel im Netz - zurück zur Person! Aktuell habe ich aber nur zwei Quadcopter und drei weitere Projekte am Laufen.
In der Hoffnung, dass einige der damaligen Mithacker hier noch lesen: Hat noch jemand ein funktionsfähiges PCB mit der originalen Software zum Verkauf und würde es abgeben? Bei Aliexpress habe ich leider nichts mehr gefunden.
Ich müsste meinen noch irgendwo haben, wenn ich ihn beim Umzug nicht entsorgt habe. Ich schau heute abend mal, dann kannst du ihn haben!
Wen es interessiert: Der Hack-O-Copter lebt im rcgroups Forum weiter. Dort wurden inzwischen wohl schon viele andere Typen "gehackt": https://www.rcgroups.com/forums/showthread.php?2278850-BradWii-revolution-!!-(for-toy-quadcopters)
Bei der Gelegenheit: Mein Enkel hat das gute Stück etwas hart auf einem Fliesenboden gelandet. Das hat die Elektronik nicht überlebt. Falls also jemand noch ein Exemplar hat, bei dem die Elektronik spielt aber die Mechanik (Rotor, Motor, ...) defekt ist, wäre ich interessiert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.