Den Bulink gibts bei Aliexpress. Da hab ich den zumindest gefunden
überall anders (dx,goodluckbuy,tmart) gabs den wohl nicht.
Ob es geht weiß man noch nicht..
Aber ich hoffe das einer mal die gesendeten Bytes rausbekommt.
Möchte ungern dann nochmal 4 Wochen warten müssen und noch weniger mir
extra nur fürs unlocken so ein dingen kaufen. Und außerdem hab ich dann
nochmal was rumfliegen....
No y. schrieb:> Aber ich hoffe das einer mal die gesendeten Bytes rausbekommt.> Möchte ungern dann nochmal 4 Wochen warten müssen und noch weniger mir> extra nur fürs unlocken so ein dingen kaufen. Und außerdem hab ich dann> nochmal was rumfliegen....
Wenn es mit dem Bulink funktioniert, wird sich wahrscheinlich keiner
dir Arbeit antun, das unlock/erase Protokoll nachzubauen. Das zahlt
sich dann nicht wirklich aus.
Ehe das Wiki auf mikrocontroller.net nicht existiert, macht es imho
wenig Sinn, das entstehende Schaltbild hier immer wieder neu an zu
hängen. Ich habe unter http://df2au.nordlink.org/fuerma/ eine Ablage
eingerichtet. Der Lesezugriff ist für alle frei.
Falls jemand schon Schaltungsteile aufgenommen hat, kann er sie mir per
Mail schicken. Auch Scans von handschriftlichen Zeichnungen sind
willkommen. Ich baue das dann ein.
Rudolph schrieb:> Hier mal ein paar Bilder vom Innenleben meines rosa Quadro-Taumlers.>> Das ist ja noch weniger komplex, Clon des Clons?
Vielen Dank! Die Platine ist die gleiche wie vom "Frankfurt"-copper
weiter oben.
MCU und IMU sind identisch. Allerdings kann man Unterschiede in der
Schaltung erkennen. Es werden andere PWMs für die Motoren verwendet, und
die INT-Ausgang vom MPU6050 ist nicht verbunden. Merkwürdig ist auch,
dass es zusätzliche Leitungen zum Tranceiver gibt. Evtl. ist das gar
kein BK2423?
Da auch der Hersteller ein anderer ist, ist anzunehmen dass es sich um
andere Firmware handelt. Das erklärt vielleicht auch die schlechtere
Performance.
Immerhin ist der SWD-Port auch herausgeführt, so dass man den MCU neu
flashen kann.
Github ist bestimmt was schönes. Ich bevorzuge die Schildkröte und CVS.
Da liegt die Info dann auf meinem eigenen Server. Mag sein, ich bin
altmodisch.
Die Liste habe ich ausgedruckt. Die Info auf Github werde ich auch
aufsaugen und umsetzen.
Du kannst Dir auch Git auf einem eigenen Server aufsetzen :) CVS ist
inzwischen schon etwas antik. Ich werde Deine Daten dann ins Repository
Spiegeln, wenn Du nichts dagegen hast.
Georg G. schrieb:> Github ist bestimmt was schönes. Ich bevorzuge die Schildkröte und CVS.
Dann nutze doch die Schildkröte für Git:
https://code.google.com/p/tortoisegit/ ;)
> Da liegt die Info dann auf meinem eigenen Server. Mag sein, ich bin> altmodisch.
Mit git liegt sie überall, das ist ja das schöne daran. Jeder hat die
komplette History, auch Offline, und falls jemand sich entscheidet sein
Repo zu schließen ist nichts verloren.
Philipp E. schrieb:
Hallo Philip,
> Konkret geht es um den Crazyflie [1]. Ist vermutlich einigen hier schon> ein Begriff. Da der Copter auch auf einer ARM-CPU aufbaut, scheint mir> die Adaption der Crazyflie Firmware ein sehr vielversprechender> Ausgangspunkt für die Entwicklung einer eigenen Firmware.
Den Crazyflie habe ich mir auch schon angeschaut (es liegt einer hier!).
Leider ist die Qualität der Hardware und die Flugtauglichkeit nicht mit
dem JXD385 zu vergleichen. Dafür hat er natürlich mehr Rechenleistung.
Die Software sollte eine gute Vorlage für viele Features liefern. Eine
Schwierigkeit ist allerdings, dass sie deutlich zu groß ist.
Sehr nützlich ist auch das Crazyradio, was man für einen Telemetrie-Link
verwenden könnte.
Im Multiwii-Forum hat mich jemand auf Bradwii verwiesen. Das ist eine
noch relativ unverbastelte Firmware, die gut strukturiert ist:
http://www.rcgroups.com/forums/showthread.php?t=1922403
Es gibt von Bradwii auch schon einen ersten Cortex-M3 Port:
https://github.com/trollcop/bradwii
Dieser lies sich mit Keil relativ einfach bereits auf 17kb Codegröße
compilieren. Mit ein paar weiteren Optimierungen sollte sich die
Software auf den MINI54ZAN quetschen lassen. Der MPU6050 wird bereits
unterstützt.
Georg G. schrieb:> Ehe das Wiki auf mikrocontroller.net nicht existiert, macht es imho> wenig Sinn, das entstehende Schaltbild hier immer wieder neu an zu> hängen.
Der Artikel ist ja bald da. Aber darauf muss niemand warten.
http://www.mikrocontroller.net/articles/Spezial:Hochladen
Datei hochladen und Link hier posten, ich füge das Bild dann auch ins
Wiki ein.
Man kann hier auch alte Versionen mit neuen überschreiben.
Ich schlage vor, den "Zielnamen" immer mit dem Präfix HOC_ zu versehen,
also z.B. "HOC_Schaltplan".
Heute war bei mir die Hölle los, hatte nicht mal Zeit, einen Kaffee zu
trinken. Aber bis Freitag/Samstag bin ich so weit.
Tim schrieb:> Evtl. ist das gar kein BK2423?
Den garstig verklebten Uhrenquarz finde ich ein wenig seltsam.
Und bald noch seltsamer, dass das der einzige Quarz ist.
> Immerhin ist der SWD-Port auch herausgeführt, so dass man den MCU neu> flashen kann.
Wo ist da irgenwas herausgeführt? :-)
Die ganzen Pads in den Ecken?
Rudolph schrieb:> Wo ist da irgenwas herausgeführt? :-)> Die ganzen Pads in den Ecken?
Die runden Pads auf der Rückseite. Ich würde mal raten:
D=Data
C=Clock
G=Ground
R=Reset
Tx=Uart RX
Rudolph schrieb:> Hier mal ein paar Bilder vom Innenleben meines rosa Quadro-Taumlers.>> Das ist ja noch weniger komplex, Clon des Clons?
Hier übrigens ein Review des "Mould King X6"
http://www.rcgroups.com/forums/showthread.php?t=2023579
Er scheint weniger wendig als der JXD385 zu sein und nutzt ein
inkompatibles RC-Protokoll.
Martin Schröer schrieb:> Thorsten, zur 808 tendiere ich nur deswegen, weil … der Copter> fliegt damit noch anständig [hoch].>> Die Y3000 müsste ich mir mal als Alternative ansehen.
Heute ist meine Y3000 angekommen, hatte aber noch keine Zeit zum testen.
Aber dieses Video ist recht vielsagend. Da werden beide verglichen:
http://www.youtube.com/watch?v=CgtTg62GDfs
Zur Flughöge: Die Y3000 wiegt mit Akku und Gehäuse 17,6 Gramm.
Auseinander gebaut habe ich sie noch nicht.
Tim schrieb:> Hier übrigens ein Review des "Mould King X6"
Ah nett, da war auch die Bedienungsanleitung auf Englisch zu finden.
Blöderweise bekomme ich das Teil damit auch nicht zum Fliegen, trotz
jetzt eingestelltem "Easy" Modus und dem Wissen mit was man wofür
trimmt.
Meiner zieht immer nach Links weg, wenn ich das Trimming maximal auf
Rechts drehe und den Richtungshebel voll nach Rechts drücke, dann fliegt
der immer noch nicht einfach nur nach Oben.
Wenn man den auf den Boden legt und langsam Gas gibt sieht man die
Rechte Seite leichter abheben.
Mit dem Müll kann ich bestenfalls unsere Katze erschrecken.
Noobi schrieb:> geht der mit funk ?
Wie meinst Du das? Willst Du ein Videosignal (CVBS o.ä.) funken? Oder
nur per Funk den Ausöser drücken?
Für Letzteres müsste man das Kamera-Gehäuse öffnen, z.B. über "Pin 9" ^^
die Taste überbrücken und eine Auslöse-Funktion in die Firmware
programmieren.
Den Aufwand per Funk den Auslöser zu drücken kann man sich wohl sparen.
Auf eine xGB-Karte gehen sicher längere Filme drauf als der Quad-Akku
Laufzeit hat.
Oliver Stellebaum schrieb:> Den Aufwand per Funk den Auslöser zu drücken kann man sich wohl sparen.
Bei Kameras, wo die Key-Frames die gleiche Qualität haben, wie die Fotos
oder falls man keine Fotos will, hast Du Recht.
Ansonsten braucht die Kamera einen Intervall-Modus, wenn man per Funk
den Auslöser nicht drücken kann.
Meiner kam gestern an. Konnte ein paar mal fliegen. Wirklich cooles
Teil.
Heute ist er mir auf die Propeller gestürzt. Dabei ist ein Motor kaputt
gegangen =(. Sowie es manchen weiter oben auch schon passiert ist.
Deshalb will ich mir einen zweiten kaufen. Ist dies hier der selber wie
im Starterpost?
hubsi schrieb:> Hm, es gibt in der auch einen JD-185, hier etwa für 30 aus .uk> http://www.ebay.co.uk/itm/6-Axis-2-4Ghz-4CH-RC-Remote-Radio-Control-Helicopter-GYRO-UFO-Flying-JD-185-Mini-/231065258307
Grüsse
Edit: Ich konnte es reparieren. Da ich eh nichts mehr zu verlieren
hatte, habe ich den Motor einfach in den Schraubstock gespannt und
anschliessen mit einer Zange an der Welle nach oben gezogen. Da kam er
wieder ein paar mm nach oben und siehe da er läuft wieder.
Die Motoren konnte ich flicken. Nun habe ich jedoch das Problem das
plötzlich gar nix mehr geht. Nichteinmal mehr die Leds leuchten. Also
auseinander gebaut und die Spannung gemessen. Ich habe 0.6V an VCC bei
den 4 Löchern gemessen. Kann es sein das der Spannungsregler hin ist?
Weiss per Zufall jemand von welchem Typ der ist?
Das Datenblatt ist hier verlinkt. Glaube nicht, dass der regler hin ist.
Die Elektronik verbraucht ja kaum Strom vermute ich... Wird jedenfalls
schwer den Regler oder einen Ersatz zu finden, ist so ziemlich fast der
einzige in sot32.
Marius S. schrieb:> Das Datenblatt ist hier verlinkt. Glaube nicht, dass der regler hin ist.> Die Elektronik verbraucht ja kaum Strom vermute ich... Wird jedenfalls> schwer den Regler oder einen Ersatz zu finden, ist so ziemlich fast der> einzige in sot32.
Der "Frankfurter" nimmt entweder 35 mA (keine Verbindung mit der
Fernbedienung) oder 40 mA (Verbindung mit der Fernbedienung)auf.
Beide Werte bei stehenden Motoren.
Meiner nimmt 0mA auf wenn ich ihn anhänge. Ein Kurzschluss ist auch
nicht vorhanden. Ich denke ich bestelle einfach mal einen MCP1700. Der
scheint das gleiche Pinout zu haben und kostet fast nichts.
Er ging kaputt als ich den Akku angschlossen habe. Die Leds haben ganz
kurz aufgeleuchtet und dann war er Tot. Von daher denke ich schon das
der Regler hin sein könnte.
Torsten C. schrieb:> Das Die 95ct passen gut zum Preis des Hack-O-Copters:
Da fehlt nur noch ein kleiner AVR, der das serielle Protokoll der
Fernbedienung in die 4 Bit des Displays übersetzt. Und das Display will
5V haben, am Stecker liegen aber nur 3.3V. Da finden wir bestimmt noch
was, was besser passt.
Georg G. schrieb:> Da finden wir bestimmt noch was, was besser passt.
Aber bitte nicht für 5 Euro oder mehr.
Tim schrieb:> BK3423 - 2.4 Ghz tranceiver, anscheinend voll kompatibel zum nrf24L01
Ist das "geraten" oder wie wahrscheinlich ist es, dass das stimmt?
Ich brauche eh ein neues Protokoll um Bilder zurückfunken und DGPS-Daten
zum HOC senden zu können. Ich weiss nicht, ob es sich lohnt, auch noch
die Fernbedienung zu hacken.
Tim schrieb:> Man müsste mal mit einem LA schauen, ob dort auch etwas ausgegeben wird.
Ich persönlich lege darauf keinen Wert, da ich aus o.g. Gründen eh 'ne
neue Sender-Firmware brauche.
Wenn das mit den Fotos irgendwann klappt, wäre natürlich ein buntes TFT
schöner, dann von mir aus auch über 5€.
So, wer macht denn nun einen Stromlaufplan vom Sender? Hier noch das
letzte Bild, ein zweiter Ausschnitt:
http://www.mikrocontroller.net/articles/Datei:HOC_Fernbedienung_Platine_Ausschnitt2.jpeg
Torsten C. schrieb:> So, wer macht denn nun einen Stromlaufplan vom Sender?
Gaaaaaaanz ruhig... ich bin dran. Leider bisher nur an Hand der Fotos.
Aber es gibt schon einen Verdächtigen für die CPU. Und das wäre die
halbe Miete.
Frage: Ist SDA vom unbestückten LCD Anschluss mit dem Prozessor Pin 9
verbunden und SCL mit Pin 10?
Wenn dann noch Pin 4, 16 und 17 irgendwie gut kontaktierbar wären, wäre
es gegessen.
Georg G. schrieb:> Und das Display will> 5V haben, am Stecker liegen aber nur 3.3V. Da finden wir bestimmt noch> was, was besser passt.
Es tut auch wunderbar mit 3.3V und einer kleinen Ladungspumpe für die 5V
Kontrast.
Den notwendigen Takt kann man ja beim Konvertierungs-µC mit abziehen.
Torsten C. schrieb:> Tim schrieb:>> BK3423 - 2.4 Ghz tranceiver, anscheinend voll kompatibel zum nrf24L01>> Ist das "geraten" oder wie wahrscheinlich ist es, dass das stimmt?
Man kann die Signale der Fernbedienung mit einem nrf24L01 empfangen.
Code dafür habe ich weiter oben gepostet*. Die Chips sind Pinout- und
Registerkompatibel. Der BK2423 hat allerdings noch eine weitere
Registerbank, die mit "magischen" Konstanten initialisiert werden muss.
Ziemlich merkwürdig.
* hier: Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter"
Tim schrieb:> Man kann die Signale der Fernbedienung mit einem nrf24L01 empfangen.
Danke, sorry falls überlesen.
Dann werd' ich das gleich mal ausprobieren wenn die Dongles da sind,
ebay 300975449625.
Torsten C. schrieb:> Dann werd' ich das gleich mal ausprobieren wenn die Dongles da sind,> ebay 300975449625.
Der hat aber keinen LNA - wahrscheinlich also eine geringere Reichweite
als die normale Fernbedienung. Aber egal, werde auch mal eins bestellen.
Tim schrieb:> eine geringere Reichweite
Mit Sicherheit, 0dBm = 1mW. Die Angabe "10-20M or so" habe ich so auch
noch nie in einem Datenblatt gelesen.
Egal, mir geht es darum, wenn der Hack-O-Copter neben dem Notebook auf
dem Tisch fliegt, dass ich dann Variableninhalte auf dem Bildschirm
verfolgen kann und Regel-Parameter verändern kann. Auch die
Bildübertragung würde ich erstmal mit dem PC machen.
Ich habe so'ne USB-Trainings-Fernbedienung für Flugsimulatoren. Dann
nehme ich die erstmal.
Torsten C. schrieb:> Dann werd' ich das gleich mal ausprobieren wenn die Dongles da sind,> ebay 300975449625.
Ich frage mich, ob der Stick mit Bootloader kommt, oder ob man noch
einen programmer braucht?
Tim schrieb:> ob der Stick mit Bootloader kommt
Torsten C. schrieb im
Beitrag "Re: China SUPER Bauteile-Schnäppchen Thread" :
> Mit Etwas Glück haben die die "usb-to-uart.hex firmware" schon fertig> drauf.
Ich werd's sehen, wenn der da ist.
PS: Mit PA + LNA habe ich keine gefunden. Aber das kann ja noch kommen.
Georg G. schrieb:> Gaaaaaaanz ruhig... ich bin dran. Leider bisher nur an Hand der Fotos.> Aber es gibt schon einen Verdächtigen für die CPU. Und das wäre die> halbe Miete.>> Frage: Ist SDA vom unbestückten LCD Anschluss mit dem Prozessor Pin 9> verbunden und SCL mit Pin 10?>> Wenn dann noch Pin 4, 16 und 17 irgendwie gut kontaktierbar wären, wäre> es gegessen.
Welchen Controller vermutest du? Sieht aus wie 8051 Derivat.
Georg G. schrieb:> N79E825A
Hmmm. Ich habe mal mit meiner dienstlichen E-Mail-Adresse den "Sales
Support Inquiry" angeschrieben.
Ich hab' noch einen neuen Thread aufgemacht. Den von Hubsy kannte ich
nicht und habe ihn erst hinterher gefunden, siehe
Beitrag "Nuvoton Datenblatt - wir finden's nicht."
Tim schrieb:> Ich frage mich, ob der Stick mit Bootloader kommt, oder ob man noch> einen programmer braucht?
Ich habe den folgenden Link schon im China Thread zusammen mit dem
USB-nrf-Dongle gepostet. Da es hier auch einige Relevanz haben könnte
anbei:
http://wiki.bitcraze.se/projects:crazyradio:index
Die Jungs haben sehr gut dokumentiert, wie die den Chip verwenden.
Inklusive Open Source USB-Flash Tool, etc.
Viele Grüße
Ach so, ganz konkret ist hier die Firmware von den Bitcraze Entwicklern:
https://bitbucket.org/bitcraze/crazyradio-firmware/src
Dort gibt es sowohl Code um das Dongle via SPI zu Flaschen als auch
USB-Flash Tool.
Ach ja, die benutzen den Nordic Bootloader. Ich habe mal ins Datenblatt
geschaut, dort steht, dass der Bootloader von Haus aus auf dem Chip ist.
Nochmal kurz zum Nordic USB Dongle. Habe das System hinter dem
Bootloader soweit durchdrungen. Alles sehr einfach und übersichtlich
umgesetzt. Interessanter Text dazu:
"Hi, I just want to chime in that the chips do ship with the USB
bootloader, which I was able to use to reprogram it over USB. The USB
bootloader is stored at the upper 2KB of the flash (starting at 0x7800),
so it shouldn't be overwritten by normal program. However, the code
execution starts at the lowest address (0x0000) and therefore normal
programming will overwrite the 3-byte long absolute jump instruction,
and thus would cause the bootloader to stop being functional after
program and reset."
http://forum.diyembedded.com/viewtopic.php?f=5&t=647
Ja deswegen hab ich ja gefragt ir scheint wohl die über-billig Variante
zu sein .....
Ich hab glaube ich ein Problem ich hab 2 bestellt und muss dank der
bewertungen festellen das von dem Händler aus Asien geliefert wird ,
hilfe der zoll.
Turbonator schrieb:> Ich hab glaube ich ein Problem
Warte es ab. Oft hat man Glück.
Ansonsten: Versankostenfrei immer im Abstand von mehreren Tagen
bestellen! Sonst gibt es keine "gesparten" Versandkosten, die man gegen
die Einfuhrumsatzsteuer aufrechnen kann.
BTW: Ich habe gerade diverse Chinamänner angeschrieben, was die für 30
Stück ohne Fernbedienung und Zubehör haben wollen. Mal sehen, was da
kommt.
PS:
Turbonator schrieb:> IR scheint wohl die über-billig Variante zu sein
Das sieht mir eher nach einem Dreckfuhler aus.
Torsten C. schrieb:> Ich habe gerade diverse Chinamänner angeschrieben, was die für 30> Stück ohne Fernbedienung und Zubehör haben wollen
In dem Fall nehme ich 2 ;-)
Der österreichische Zoll dürfte wieder mal ziemlich lahm sein :( Oder
das Paket ging irgendwo verloren... Ich hoffe ja es kommt noch, habe
aber zur Sicherheit bessky_cn mal auf Ebay kontaktiert.
Leider kann ich keine Anleitung für den JD-385 im Netz finden und die
Fernbedienung des Hubsan sieht anders aus.
Kann bitte jemand die Funktion der Taster auf der Fernbedienung posten?
Trimmung für die entsprechenden Funktionen der Joysticks?
Wie ist die Standard Belegung der Knüppel? Rechts Nick und Roll, links
Gier und Power?
Turbonator schrieb:> IR scheint wohl die über-billig Variante zu sein.
Tatsächlich, Tmart hat geantwortet:
1
Thanks for your email, it is our honor to help you.
2
It is Infrared. Sorry.we did not found the items which meets your require.
Unglaublich ...
Wegen der 30 Copter ohne Fernbedienung verhandele ich noch wegen der
Versandkosten, aber zumindest scheint Interesse zu bestehen, sowohl hier
im Forum, als auch bei den Chinesen.
Na wenn wir dann mit Steuer&Zoll wieder bei 25€ sind nützt das aber
nichts.
Und es sollte exakt das Modell sein welches wir ja alle schon im Einsatz
haben.
Oliver Stellebaum schrieb:> Na wenn wir dann mit Steuer&Zoll wieder bei 25€ sind nützt das aber> nichts.
Stimmt. Wenn ich die für 3,80€ per Hermes an Euch verschicke, sollte der
"nackte" Copter nicht mehr als 10,50€ incl. Versand kosten. Das wären
dann ca. 315€ plus Zoll und Einfuhrumsatzsteuer für 30 Stück.
> Und es sollte exakt das Modell sein welches wir ja alle schon im Einsatz> haben.
Hinterher wird die Firmware eh gelöscht, ist also egal. Die Hardware
sollte identisch sein. Ich könnte dem Verkäufer ja ein Foto der Platine
schicken und fragen, ob seine auch "Rev 02 vom 27.06.2013" sind.
Ich könnte auch 30 Copter und eine passende Fernbedienung zum testen
kaufen, falls die Firmware bzw. das Protokoll unterschiedlich ist, weiss
man wenigstens, dass er vorher noch flog.
Ich wollte diesen Beitrag gerade "absenden", da kam das bisher
preiswerteste Angebot für 12,20€ zzgl. Versand. Das sind deutlich mehr
als 10,50€. Außerdem gilt der Preis für 120 Stück und ich müsste knapp
1500€ vorstrecken.
Ich glaube, in die Idee habe ich mich verrant. Das bringt wohl nix. :-(
PS:
Georg G. schrieb im Beitrag "Re: Nuvoton Datenblatt - wir finden's nicht."
:
> Damit beschlossen: Es ist der N79E825.
Aber eine OTP-Variante, oder? Meinst Du, dass man den auch neu flashen
kann?
Der Ansatz ist aber gut - Interesse hätte ich auch.
Lass' mal hören, wie Du Dich schlussendlich entschieden hast, bzw. ob
doch noch bessere Angebote (bei angemesseneren Mengen) eingetrudelt
sind.
Torsten C. schrieb:> Georg G. schrieb im Beitrag "Re: Nuvoton Datenblatt - wir finden's> nicht."> :>> Damit beschlossen: Es ist der N79E825.>> Aber eine OTP-Variante, oder? Meinst Du, dass man den auch neu flashen> kann?
Ich vermute die beste Lösung für die Fernbedienung ist dann ein neues
Innenleben. Oder eine Pinkompatible MCU?
Torsten C. schrieb:> Aber eine OTP-Variante, oder? Meinst Du, dass man den auch neu flashen> kann?
Laut Datenblatt ist es ganz normaler Flash Speicher, gegen Auslesen
geschützt wie üblich. Programmieren geht über den eingebauten Bootlader.
Werkzeuge dazu gibt es auf der Nuvoton Webseite kostenlos. Fertige
Hardware kostet etwa € 35.-, Schaltbilder sind in den Nuvoton
Unterlagen. Es ist nichts besonderes da drin verbaut.
Tim schrieb:> ein neues Innenleben
Das Datenblatt sagt, dass bei einem Reset die meißten Pins hochohmig
werden. Also: Pin 4 an Masse brücken und eine Platine mit neuem µC an
den richtigen Stellen mit Fädeldraht verbinden.
Ein richtiger N79E825 sieht anders aus. Das muss ein OTP sein.
Dann geht natürlich der Streit los: AVR? MSP430? ARM?
Torsten C. schrieb:> Dann geht natürlich der Streit los: AVR? MSP430? ARM?
Natürlich ARM :) LPC812 im SOIC20 Gehäuse - hat den gleichen Footprint.
Am einfachsten wäre es aber, erst einmal ein nRF24 an einen AVR
(Arduiono) zu hängen. Dafür gibt es den Source für das V202 Protokoll
schon fertig.
Tim schrieb:> Torsten C. schrieb:>> Dann geht natürlich der Streit los: AVR? MSP430? ARM?>> Natürlich ARM :) LPC812 im SOIC20 Gehäuse - hat den gleichen Footprint.
Wenn ich das richtig sehe, dann wird ein ADC benötigt und der LPC812 hat
keinen.
Davis schrieb:> Wenn ich das richtig sehe, dann wird ein ADC benötigt und der LPC812 hat> keinen.
Guter Punkt. Leider gibt es gar nicht so viele ARMs in SOIC20. Dann
schon eher TSSOP20. Ein AVR würde es aber auch tun. ATtiny861 z.B.
Ich habe große Teile des Schaltbildes aufgenommen. Es passt alles exakt
zu dem N79E825. GND, VCC an den richtigen Pins, die Potis der Knüppel
auf den 4 AD Eingängen. Es wäre ein riesiger Zufall, wenn ein anderer
Prozessor das gleiche Pinout hätte.
Da die Pads zum Programmieren auf dem Board sind, kann ja mal jemand,
der Lust und Zeit hat, versuchen, die ID des Prozessors auszulesen. Mein
Copter ist leider noch nicht hier. Sonst würde ich es selbst machen.
Georg G. schrieb:> Ich habe große Teile des Schaltbildes aufgenommen. Es passt alles exakt> zu dem N79E825. GND, VCC an den richtigen Pins, die Potis der Knüppel> auf den 4 AD Eingängen. Es wäre ein riesiger Zufall, wenn ein anderer> Prozessor das gleiche Pinout hätte.
Post dein Ergebnis, dann kann man sehen was geht und was nicht geht.
WICHTIGE FRAGE:
Hat einer von Euch bei Aliexpress gekauft?
Ich brauche einen Snapshot:
1
www.aliexpress.com/snapshot/########.html
Den Link bekommt man, wenn man auf "Manage Orders" / "My orders" auf den
Artikel klickt.
Ich brauche den Snapshot, um einen Link mit dem alten (niedrigen) Preis
zu haben.
Dominic A. schrieb:> weil erst 3 Stück verkauft wurden
28,83€ wären mir auch zu teuer. Oder habe ich mich verrechnet?
Georg G. schrieb:> Es wäre ein riesiger Zufall, wenn ein anderer> Prozessor das gleiche Pinout hätte.
Das wird schon der Prozessor sein, da widerspricht ja keiner. Aber
vermutlich ein OTP-Typ, also ohne Flash.
Torsten C. schrieb:> Aber vermutlich ein> OTP-Typ, also ohne Flash.
Die Chinesen sehen sehr aufs Geld. Warum sollte man einen OTP
entwickeln, wenn man Flash hat? Wäre der in der Produktion billiger? In
welcher Technologie? Das macht schon seit Jahren niemand mehr. Man nimmt
den normalen Flash Typ und setzt die Sicherheitsbits.
Das ist alles Spekulation und hilft nicht wirklich weiter. Irgendjemand
muss einen Programmer anschließen und es ausprobieren. Am besten noch
mit einem "richtigen" N79E825 daneben, um zu testen, ob der Programmer
wenigstens damit funktioniert.
Georg G. schrieb:> Man nimmt den normalen Flash Typ und setzt die Sicherheitsbits.
Ich hab' jetzt nicht nachgeschaut. Kann man die so "durchbrennen", dass
sie nicht löschbar sind? Dann hast Du Deine Antwort.
Torsten C. schrieb:> Ich hab' jetzt nicht nachgeschaut. Kann man die so "durchbrennen", dass> sie nicht löschbar sind? Dann hast Du Deine Antwort.
Das wird wohl das gleiche wie mit den Lockbits im Mini54ZAN sein.
Torsten C. schrieb:> Kann man die so "durchbrennen", dass> sie nicht löschbar sind?
Üblicherweise sind sie löschbar - aber nur zusammen mit dem Rest des
Speichers.
> preiswerteste Angebot für 12,20€ zzgl. Versand. Das sind deutlich mehr> als 10,50€. Außerdem gilt der Preis für 120 Stück und ich müsste knapp> 1500€ vorstrecken.>> Ich glaube, in die Idee habe ich mich verrant. Das bringt wohl nix. :-(
Also ich würde 10 bis 15 stk nehmen wenn das mit dem (usb) funkmodul
klappt ,wenn nicht 5stk als ersatzteilager und mit den einzelteilen kann
man ja was basteln flugzeug ect.(motoren porpeller)
Sag dem Chinamann deutlich das Du 100 Stück (ohne FB) für 900€ inkl.
Versand nimmst. Sonst kann er es vergessen. Deute an das Du bei
einwandfreier Ware evtl. 1000 Stück nimmst.
Das ist schlimmer als auf einem Bazar, nicht so schnell aufgeben.
Ich habe noch einmal etwas mit der Fernbedieung herumgespielt. Das
Format der Datenpakete ist soweit verstanden und entspricht dem vom
V202, wie oben beschrieben.
Das Frequency-Hopping Schema scheint aber stark abzuweichen. Beim V202
werden nur 16 Kanäle benutzt. Beim Hack-O-Copter (JXD185/385) scheinen
es fast alle zu sein. Die Verteilung hat dabei einen Schwerpunnkt auf
den niedrigen Kanälen (siehe Bild).
Wahrscheinlich könnte man einfach auf allen Kanälen nach
Zufallsverteilung Daten senden und so den Copter kontrollieren.
Allerdings werden dann viele Daten verloren gehen. Besser wäre es, das
Hopping-Schema zu kennen.
Oliver Stellebaum schrieb:> Sag dem Chinamann deutlich das Du 100 Stück (ohne FB) für 900€ inkl.
Genau. Bleib dran (wenn du Lust / Zeit hast). Ich denke das Potential,
die Dinger hier an den Man zu bringen ist sehr sehr groß. Und die
Freude, die du den Leuten damit machst auch.
Wenn du Sorgen hast, auf den Coptern sitzen zu bleiben, finden sich
bestimmt hier Leute, die im Notfall bei dem Preis auch mehr abnehmen.
Also ich hätte gerne so 2 bis 3 Stück. Wenn am Ende die Nachfrage nicht
groß genug ist würde ich dir aber auch 10 abnehmen. So ne kleine Flotte
hat was. Auch als Geschenk für Freude und Verwandte ne tolle Sache, wenn
hier irgendwann mal die alternative Firmware steht. Auch ein tolles Dev.
Board. Ach so, viele Möglichkeiten...
Oliver Stellebaum schrieb:> Deute an das Du bei einwandfreier Ware evtl. 1000 Stück nimmst.
Das deckt sich mit meiner Erfahrung. Fasele evtl. etwas von long term
buisness relationship, etc. Ist ja vielleicht am Ende gar nicht mal
gelogen, wenn der Preis stimmt und hier irgendwann ne Firmware steht
finden sich hier sicher noch viel viel mehr Interessenten. Wenn ich mir
überlege wie der erfolgreich der Crazyflie ist (und der kostet 150 $
ohne Fernbedienung).
Weiterhin ist in meinen Augen jegliches Zubehör / Ersatzteile unnötig.
Bei dem Preis nehme ich lieber nen zweiten Copter, da habe ich
Ersatzteile für jeden erdenklichen Fall. Den LiPo-Lader werde ich
persönlich ohnehin nicht verwenden, ich benutze einen auf MCP73831T
Basis [1]. Einzig der LiPo selber wäre interessant, aber da scheint es
ja auch eine menge alternativer Quellen für zu geben.
Also, da geht noch was. Würde mich freuen wenn du das durchziehst ;-)
[1]
http://www.ebay.com/itm/LiPo-Charger-Basic-Micro-USB-3-7V-Battery-Charger-module-/321149954122?
Philipp E. schrieb:> finden sich hier sicher noch viel viel mehr Interessenten. Wenn ich mir> überlege wie der erfolgreich der Crazyflie ist (und der kostet 150 $> ohne Fernbedienung).
Ja, und er hat außer der schnelleren CPU definitiv keine bessere
Hardware. Das Preis/Leistungsverhältnis des JD185 ist wirklich
unschlagbar.
Tim schrieb:> 9.90$? WTF? Mit meiner Variante liegen ich bei einem Bruchteil des> Preises:
Na klar. Das geht natürlich noch viel billiger. Habe das Ding mir schon
vor längerem unabhängig vom Copter bestellt, weil ich einen kleinen
Lader für eine Zelle brauchte und keine Zeit hatte mich um den Aufbau zu
kümmern. Wollte das nur als eine Möglichkeit erwähnen, der billigste und
beste Weg ist sicher [1].
Philipp E. schrieb:> (und der kostet 150 $ ohne Fernbedienung)
Der Fairness halber sei angemerkt, dass er ohne Fernbedienung aber mit
USB-Nrf-Dongle 150 $ kostet. Ganz ohne Fernbedienung kostet er "nur" 120
$. Dennoch, der Preis des JD185 ist so unglaublich gut, wenn jetzt noch
Preisnachlass durch größere Menge und weglassen der "Fernbedienung",
Lader, etc. dazukommt, dann kann man ja gar nicht mehr wiederstehen ;-)
[1] https://github.com/hackocopter/LiPoCharger
Philipp E. schrieb:> Na klar. Das geht natürlich noch viel billiger. Habe das Ding mir schon> vor längerem unabhängig vom Copter bestellt, weil ich einen kleinen
Ich freue mich nur, dass eine Bastellösung tatsächlich mal preiswerter
als der chinesische Clone ist :)
Philipp E. schrieb:> Oliver Stellebaum schrieb:>> Sag dem Chinamann deutlich das Du 100 Stück (ohne FB) für 900€ inkl.>> Genau. Bleib dran (wenn du Lust / Zeit hast). Ich denke das Potential,> die Dinger hier an den Man zu bringen ist sehr sehr groß. Und die> Freude, die du den Leuten damit machst auch.
Man sollte auch bedenken, dass die Preise im Moment wegen Weihnachten
anziehen. Das wird wohl auch für größere Bestellungen gelten.
Wahrscheinlich gibt es im Januar mehr Verhandlungsspielraum.
Also bei einem Preis von <12 Euro würde ich auf jeden Fall auch 2-3
Stück nehmen.
Habe mir soeben auch noch 5 Stück der MCP73831T bestellt.
Eine kleine Frage zu deinem Akkulader. Ist der Ladestrom mit 400mA nicht
ein bisschen hoch? Ich lese immer etwas von 1C bei kleinen Akkus. Das
entspricht ja ca. 240mA beim Original Akku.
Noch eine weitere Frage: Weiss jemand was für ein Stecker da am Akku
dran ist? Oder wie löst ihr das mit dem Aufladen? Eigenen Stecker dran
machen?
Tim schrieb:> Ich freue mich nur, dass eine Bastellösung tatsächlich mal preiswerter> als der chinesische Clone ist :)
Finde ich auch voll gut! ;-) Daher:
Dominic A. schrieb:> Habe mir soeben auch noch 5 Stück der MCP73831T bestellt.
Dito ;-)
Tim schrieb:> Man sollte auch bedenken, dass die Preise im Moment wegen Weihnachten> anziehen. Das wird wohl auch für größere Bestellungen gelten.> Wahrscheinlich gibt es im Januar mehr Verhandlungsspielraum.
+1
Dominic A. schrieb:> Also bei einem Preis von <12 Euro würde ich auf jeden Fall auch 2-3> Stück nehmen.> Habe mir soeben auch noch 5 Stück der MCP73831T bestellt.> Eine kleine Frage zu deinem Akkulader. Ist der Ladestrom mit 400mA nicht> ein bisschen hoch? Ich lese immer etwas von 1C bei kleinen Akkus. Das> entspricht ja ca. 240mA beim Original Akku.
Du hast recht. Ich habe auch noch einmal nach ähnlichen Akkus gesucht.
Obwohl es keine Angaben zu den JXD385 Akkus gibt, liegen alle ähnlichen
bei 1 C.
Ich habe den Widerstand in der Schaltung auf 4k7 erhöht.
> Noch eine weitere Frage: Weiss jemand was für ein Stecker da am Akku> dran ist? Oder wie löst ihr das mit dem Aufladen? Eigenen Stecker dran> machen?
Ich würde eines der Ladegeräte schlachten und das Innenleben ersetzen.
Tim schrieb:> Ich würde eines der Ladegeräte schlachten und das Innenleben ersetzen.
Ich denke ich werde den Stecker am Akku mit einer Standard Stiftleiste
ersetzen. Somit kann ich dann eine kleine "Ladestation" für mehrere
Akkus bauen und muss nicht immer jeden Akku einzeln laden. Falls meine
zusätzlichen Akkus irgendwann einmal eintrudeln.
Bis Januar ist es nicht mehr lang, das "professionelle"
Weihnachtsgeschäft ist vermutlich lange gelaufen. Und bis die
Organisation einer Sammelbestellung über das Forum dauert bei normalem
Workflow sicher auch einige Zeit.
Vielleicht kann man sogar zeitgleich eine Sammelbestellung für den
Bu-Link organisieren und das ganze dann als Copter-Bundle anbieten.
Kopter+Bulink+Software für 25€ oder sowas.
Oliver Stellebaum schrieb:> Vielleicht kann man sogar zeitgleich eine Sammelbestellung für den> Bu-Link
Das wäre auch nicht schlecht. Auf der anderen Seite, vielleicht geht es
ja auch ohne BuLink, das Chip Erase Protokoll muss doch zu knacken sein.
Ist denn schon sicher, dass der BuLink funktioniert? Oder ist der noch
auf dem Weg von China nach Deutschland?
Philipp E. schrieb:> oder ist der noch auf dem Weg von China nach Deutschland?
Tim schreibt bestimmt einen unübersehbaren Post, wenn der da ist,
vielleicht mit #### "eingerahmt"? ;-)
Tim schrieb:> Besser wäre es, das Hopping-Schema zu kennen.
Hat jemand 'ne Vorstellung, wieviele NRF24L01+ man "parallel" betreiben
muss, um alle 128 Kanäle zu scannen? Ich befürchte, da muss man sich 128
Stück kaufen, oder?
Oliver Stellebaum schrieb:> Das ist schlimmer als auf einem Bazar, nicht so schnell aufgeben.
Ich mache für die Verkäufer eine Powerpoint- bzw. PDF-Datei. Bilder
sagen mehr als 1000 Worte. Dann sollten die das hoffentlich schnell
begreifen.
Torsten C. schrieb:> Ich habe mal den "Sales Support Inquiry" angeschrieben.
Meine Frage ist heute an das "MCU team" weitergeleitet worden; ich war
in CC.
Hi,
mein „Frankfurter“ Helikopter liegt scheinbar in Raubling beim Zoll und
kann nicht verzollt werden da keine Rechnung beiliegt. Das hinwenden
meines Paypal Zahlungsbelegs macht auch keinen Sinn, da auf dem Päckchen
„Remote control“ für 19,99€ steht und das hat weder vom Inhalt noch vom
Preis etwas mit dem bestellten zu tun. Tolle wurst.
Gruß Martin
Martin K. schrieb:> Das hinwenden> meines Paypal Zahlungsbelegs macht auch keinen Sinn, da auf dem Päckchen> „Remote control“ für 19,99€ steht und
Ich habe das ganz gut hinbekommen indem ich Paypalbeleg UND
Ebayartikelnummer als PDF-Druck zum Zollamt schickte. Das können die
dann wohl schon vergleichen (so sie denn wollen).
Als Anhang die derzeitigen Erkenntnisse über die Pinbelegung des
Prozessors in der Fernbedienung. Leider ist nur mit Fotos momentan nicht
mehr machbar.
Falls jemand noch Erkenntnisse hat, bitte melden,
Georg G. schrieb:> Die Chinesen sehen sehr aufs Geld. Warum sollte man einen OTP> entwickeln, wenn man Flash hat? Wäre der in der Produktion billiger?
Ja, z.B. 0.25 micron, standard 5V CPU sind 22 Masken, hingegen mit Flash
sind es 37 Masken, Aufpreis von ca 100%. Hierbei wird da die CPU eine
Flash cpu ist, mit den Flash Masken gearbeitet und nur eine zusaetzliche
Metall oder metall interconnection mask gemacht.
> welcher Technologie? Das macht schon seit Jahren niemand mehr. Man nimmt> den normalen Flash Typ und setzt die Sicherheitsbits.
Es gibt viele cpu mit nur otp oder simuliertem flash durch otp (4/8k
flash
durch 64k otp simuliert).
Der Vorteil von einfachen MCU ist, dass man sei es ROM wie FLASH oder
auch zusatlliches OTP designen kann, ohne mehr Flaeche zu brauchen.
Bei ARM hingegen muss man den Flash nehmen.
Georg G. schrieb:> Als Anhang die derzeitigen Erkenntnisse über die Pinbelegung des> Prozessors in der Fernbedienung. Leider ist nur mit Fotos momentan nicht> mehr machbar.>> Falls jemand noch Erkenntnisse hat, bitte melden,
Pin1: P2.CS
Pin2: P2.CLK
Pin3: P2.DATA
B. B. schrieb:> Pin1: P2.CS> Pin2: P2.CLK> Pin3: P2.DATA
Seltsam... das I2C Interface ist nämlich mit Daten und Takt auch am RF
Modul. Hast du die komplette Anschlussbelegung des Moduls, eventuell Typ
oder Datenblatt?
Andere Frage: neben der CPU auf der FB sitzt ein kleiner 6-Beiner. Kann
jemand den Typ entziffern?
Georg G. schrieb:> B. B. schrieb:>> Pin1: P2.CS>> Pin2: P2.CLK>> Pin3: P2.DATA>> Seltsam... das I2C Interface ist nämlich mit Daten und Takt auch am RF> Modul. Hast du die komplette Anschlussbelegung des Moduls, eventuell Typ> oder Datenblatt?>> Andere Frage: neben der CPU auf der FB sitzt ein kleiner 6-Beiner. Kann> jemand den Typ entziffern?
Welchen 6-Beiner meinst du? Ich hab dir mal ein Bild von meiner FB
angehängt. Ich seh da keinen 6-Beiner.
Torsten C. schrieb:> bitte gleich eintragen
Houston, wir haben ein Problem...
Es gibt auf Github den hack-o-copter. Dort werden Infos gesammelt. Wenn
hier parallel ein Wiki entsteht, besteht die Gefahr, dass Infos verloren
gehen, speziell, wenn im Forum kein Hinweis kommt.
Mir ist es im Prinzip egal, wer wo sammelt. Aber bitte einigt euch. In
diesem frühen Stadium ist es imho am sinnvollsten, wenn sich jeder nur
eine Ecke des Projekts raus sucht und dafür die Mütze aufsetzt. Ich für
mein Teil wollte das Schaltbild aufnehmen. Falls dabei jemand mitmachen
möchte - bitte, gern. Aber dann sollten wir verabreden, wie wir
vorgehen.
Torsten C. schrieb:> Philipp E. schrieb:>> oder ist der noch auf dem Weg von China nach Deutschland?>> Tim schreibt bestimmt einen unübersehbaren Post, wenn der da ist,> vielleicht mit #### "eingerahmt"? ;-)
Leider ist das bu-link noch nicht da. Heute lag aber ein Schrieb vom
Zoll im Briefkasten, vielleicht kommt da etwas - oder es ist ein
weiterer Quadcopter.
> Tim schrieb:>> Besser wäre es, das Hopping-Schema zu kennen.>> Hat jemand 'ne Vorstellung, wieviele NRF24L01+ man "parallel" betreiben> muss, um alle 128 Kanäle zu scannen? Ich befürchte, da muss man sich 128> Stück kaufen, oder?
Hmm... dann bräuchte man nur noch 128 Microcontroller um die ganzen
SPI-Kanäle auszulesen? :) Ich habe einfach alle Kanäle nacheinander
durchgescannt. Wenn das hopping der FB wirklich einen Zufallsmuster
folgt, sollte dann auch die korrekte Verteilung herauskommen. Nur die
Sequenz kennt man dann natürlich noch nicht.
Man könnte natürlich auch einen LA an die Fernbedienung hängen.
Georg G. schrieb:> Als Anhang die derzeitigen Erkenntnisse über die Pinbelegung des> Prozessors in der Fernbedienung. Leider ist nur mit Fotos momentan nicht> mehr machbar.>> Falls jemand noch Erkenntnisse hat, bitte melden,
Super, vielen Dank! Komisch dass das Funkmodul am I2C-Port hängt? Der
BK2423 hat eigentlich ein SPI interface.
Georg G. schrieb:> Houston, wir haben ein Problem...>> Es gibt auf Github den hack-o-copter. Dort werden Infos gesammelt. Wenn> hier parallel ein Wiki entsteht, besteht die Gefahr, dass Infos verloren> gehen, speziell, wenn im Forum kein Hinweis kommt.>> Mir ist es im Prinzip egal, wer wo sammelt. Aber bitte einigt euch. In> diesem frühen Stadium ist es imho am sinnvollsten, wenn sich jeder nur> eine Ecke des Projekts raus sucht und dafür die Mütze aufsetzt. Ich für> mein Teil wollte das Schaltbild aufnehmen. Falls dabei jemand mitmachen> möchte - bitte, gern. Aber dann sollten wir verabreden, wie wir> vorgehen.
Also ich sehe das so:
Das Github-Repository ist dafür da, um Quellcode und Binärdaten einfach
und unstrukturiert zu sammlen. Durch die Versionierung ist
sichergestellt das nichts verloren geht und niemand etwas kaputtspielt.
Das Repository hat genug Platz um auch ungeordnete Informationsflut wie
z.B. Logfiles zu sammeln.
Der Wikiartikel ist ein Einstiegspunkt für "Outsider" und soll eine
Übersicht über alle Informationen und Anleitungen zum Einstieg bieten.
Das Wiki enthält damit einen Informationsextrakt aus den Daten im
Repository.
Es gibt natürlich einen große Schnittmenge. Das kann man wahrscheinlich
nicht immer einfach lösen. Vielleicht wäre es in dem Fall sinnvoll, das
Repository für die Arbeitsfiles zu nutzen und die Kernerkenntnisse in
das Wiki zu übertragen wenn der Kenntnissstand einigermassen gesichert
ist? Aus dem Wikiartikel kann man ja wieder auf die Rohdaten im
Repository verlinken. z.B. ein Screenshot der Schaltung im Wiki und die
.sch Datei im Repository.
Tim schrieb:> Der Wikiartikel ist ein Einstiegspunkt für "Outsider" und soll eine> Übersicht über alle Informationen und Anleitungen zum Einstieg bieten.> Das Wiki enthält damit einen Informationsextrakt aus den Daten im> Repository.>> Es gibt natürlich einen große Schnittmenge. Das kann man wahrscheinlich> nicht immer einfach lösen. Vielleicht wäre es in dem Fall sinnvoll, das> Repository für die Arbeitsfiles zu nutzen und die Kernerkenntnisse in> das Wiki zu übertragen wenn der Kenntnissstand einigermassen gesichert> ist?
Sehe ich auch so in der Art. Ich denke, alles was ins Wiki kommt sollte
sich nicht mehr wirklich verändern und der Kentnisstand darüber sollte
einigermaßen vorhanden sein. Denn gerade so eine Wikipage ist wie du
schon schreibst für Leute, die neu dazukommen und sich auch mit dem
Hack-O-Copter befassen wollen.
Ich werde übrigens bald verrückt. Der Chinese hat nur geschrieben, dass
es wegen Weihnachten uns so länger dauern kann, er rückte aber
wenigstens mal eine Trackingseite heraus ...
Tim schrieb:> ein Screenshot der Schaltung im Wiki und die> .sch Datei im Repository.
Gutes Beispiel. Außerdem ist im Wiki schneller mal was geändert, wie der
Name schon sagt. Die Frage, ob wir das github Wiki nehmen, hatten wir
schon. Sind wir uns denn da einig?
Wie ist das z.B. mit der Pinbelegung^^? Wiki oder Github?
Tim schrieb:> Komisch dass das Funkmodul am I2C-Port hängthttp://www.i2cchip.com/mix_spi_i2c.html
Nur so ein Gedanke.
Torsten C. schrieb:> Tim schrieb:>> ein Screenshot der Schaltung im Wiki und die>> .sch Datei im Repository.>> Gutes Beispiel. Außerdem ist im Wiki schneller mal was geändert, wie der> Name schon sagt. Die Frage, ob wir das github Wiki nehmen, hatten wir> schon. Sind wir uns denn da einig?
Ja, auf jeden fall das µC Wiki. Das Github-Wiki habe ich selbst noch
nicht gefunden :)
>> Wie ist das z.B. mit der Pinbelegung^^? Wiki oder Github?
Das Textfile ins Github und die editierte Tabelle ins Wiki? :)
Hey Leute,
also die Frage Git vs. Wiki finde ich auch recht tricky. Was ist z. B.
mit dem neuen Lipo Lader bzw. dem RC-Protokoll. Da ist aktuell das
Repository die beste Anlaufstelle (Schaltung als Bild, kurze
Beschreibung bzw. Graph der aufgetretenen Channels). Das sollte auf
lange Sicht wohl eher ins Wiki, oder wie seht ihr das?
Ich persönlich finde Redundanz, auch wenn sie wohl unvermeidbar ist,
sehr störend. Ich würde dafür plädieren, im Zweifel lieber einen Link
(man kann ja sowohl die Git-Hub Doku als auch die Wiki Abschnitte direkt
Adressieren) an der entsprechenden Stelle platzieren, als die
Informationen mehrmals zu sammeln. Wenn ich den Wiki Artikel mir so
ansehe, gibt es viele Stellen, wo direkt auf das Repo verlinkt werden
könnte (Datenblätter, Fotos).
Just my 2 cents
Philipp E. schrieb:> Hey Leute,>> also die Frage Git vs. Wiki finde ich auch recht tricky. Was ist z. B.> mit dem neuen Lipo Lader bzw. dem RC-Protokoll. Da ist aktuell das> Repository die beste Anlaufstelle (Schaltung als Bild, kurze> Beschreibung bzw. Graph der aufgetretenen Channels). Das sollte auf> lange Sicht wohl eher ins Wiki, oder wie seht ihr das?>
Das sollte auf lange Sicht auch ins Wiki, wenn es fertig ist. :)
Philipp E. schrieb:> Was ist z. B. mit … dem RC-Protokoll. … Das sollte auf> lange Sicht wohl eher ins Wiki, oder wie seht ihr das?
Das fände ich auch übersichtlicher.
> Ich persönlich finde Redundanz, auch wenn sie wohl unvermeidbar ist,> sehr störend.
Redundanz sollte dringend vermieden werden, das sehe ich auch so.
> Wenn ich den Wiki Artikel mir so> ansehe, gibt es viele Stellen, wo direkt auf das Repo verlinkt werden> könnte (Datenblätter, Fotos).
OK, ich müsste erst suchen. Am besten gleich erledigen. Danke.
Torsten C. schrieb:> Hat jemand 'ne Vorstellung, wieviele NRF24L01+ man "parallel" betreiben> muss, um alle 128 Kanäle zu scannen? Ich befürchte, da muss man sich 128> Stück kaufen, oder?
Also so wie ich das sehe, müsste das Hopping Shema aus dem Source Code
der Deviation Firmware zu erkennen sein. Das File v202_nrf24l01.c [1]
implementiert das v202 Protocoll, was laut Internet mit unserem Copter
kompatibel sein müsste.
Die entscheidenden Stellen im Code:
1
// This is frequency hopping table for V202 protocol
2
// The table is the first 4 rows of 32 frequency hopping
3
// patterns, all other rows are derived from the first 4.
4
// For some reason the protocol avoids channels, dividing
5
// by 16 and replaces them by subtracting 3 from the channel
6
// number in this case.
7
// The pattern is defined by 5 least significant bits of
8
// sum of 3 bytes comprising TX id
9
staticconstu8freq_hopping[][16]={
10
{0x27,0x1B,0x39,0x28,0x24,0x22,0x2E,0x36,
11
0x19,0x21,0x29,0x14,0x1E,0x12,0x2D,0x18},// 00
12
{0x2E,0x33,0x25,0x38,0x19,0x12,0x18,0x16,
13
0x2A,0x1C,0x1F,0x37,0x2F,0x23,0x34,0x10},// 01
14
{0x11,0x1A,0x35,0x24,0x28,0x18,0x25,0x2A,
15
0x32,0x2C,0x14,0x27,0x36,0x34,0x1C,0x17},// 02
16
{0x22,0x27,0x17,0x39,0x34,0x28,0x2B,0x1D,
17
0x18,0x2A,0x21,0x38,0x10,0x26,0x20,0x1F}// 03
18
};
sowie beim init
1
constu8*fh_row=freq_hopping[sum&0x03];
2
// Higher 3 bits define increment to corresponding row
Tim schrieb:> Das sollte auf lange Sicht auch ins Wiki, wenn es fertig ist. :)
Super. Denke das ist die perfekte Aufteilung. Work in Progress im Repo
sammeln. Sobald es fertig ist Infos ins Wiki verlagern und im Repo einen
Link auf die entsprechende Stelle im Wiki.
Philipp E. schrieb:> Torsten C. schrieb:>> Hat jemand 'ne Vorstellung, wieviele NRF24L01+ man "parallel" betreiben>> muss, um alle 128 Kanäle zu scannen? Ich befürchte, da muss man sich 128>> Stück kaufen, oder?>> Also so wie ich das sehe, müsste das Hopping Shema aus dem Source Code> der Deviation Firmware zu erkennen sein. Das File v202_nrf24l01.c [1]> implementiert das v202 Protocoll, was laut Internet mit unserem Copter> kompatibel sein müsste.
Das dachte ich bis gestern auch. Nach dem Code dürften aber nur genau 16
channels genutzt werden. In der Praxis waren es nach meinem Versuch
deutlich mehr.
Was ich noch nicht geschrieben hatte: Ich habe auch Versucht das
Channel-Hopping im Empfänger zu implementieren, indem ich bei
erfolgreichem Empfang auf einem Kanal auf den Nachfolgekanal gesprungen
bin. Leider war das nicht wirklich erfolgreich - es kamen fast nie
sofort Pakete an.
Interessant und spannend. Mensch, wie gerne hätte ich endlich meinen
hier in Händen zum testen. Nur ein paar Gedanken, kann gut sein dass sie
nicht zutreffen...
Tim schrieb:> Das dachte ich bis gestern auch. Nach dem Code dürften aber nur genau 16> channels genutzt werden. In der Praxis waren es nach meinem Versuch> deutlich mehr.
Könnte es sein, dass die verwendeten Chips nicht so sauber arbeiten und
beim Test, wenn du den Empfänger auf Channel x einstellst auch mal ein
Packet empfangen wird, das eigentlich auf Channel x +/- 1 gesendet wurde
und dadurch die Anzahl der verwendeten Channels größer erscheint?
Tim schrieb:> Was ich noch nicht geschrieben hatte: Ich habe auch Versucht das> Channel-Hopping im Empfänger zu implementieren, indem ich bei> erfolgreichem Empfang auf einem Kanal auf den Nachfolgekanal gesprungen> bin. Leider war das nicht wirklich erfolgreich - es kamen fast nie> sofort Pakete an.
Ich meine in den Source code Kommentaren gelesen zu haben, dass die
Packete zwei mal verschickt werden. Könnte es sein, dass du schon beim
ersten Packet springst und es deswegen etwas "dauert" bis das Packet auf
dem nächsten Channel ankommt.
Tim schrieb:> dann bräuchte man nur noch 128 Microcontroller
Bei SPI?
Man nehme neun 74HC154 (4,32€).
Oder sehe ich das zu naiv? Oder lohnt sich die Arbeit nicht?
Da ich den NRF24L01 plane, als "Hausbus" einzusetzten, wäre so ein
Funk-Logger vielleicht nicht übel.
Philipp E. schrieb:> Könnte es sein, dass die verwendeten Chips nicht so sauber arbeiten und> beim Test, wenn du den Empfänger auf Channel x einstellst auch mal ein> Packet empfangen wird, das eigentlich auf Channel x +/- 1 gesendet wurde> und dadurch die Anzahl der verwendeten Channels größer erscheint?
Da bin ich mir nicht sicher. Die Kanäle haben 1 Mhz Abstand. Ich hoffe
doch dass die Trennschärfe ausreicht.
Philipp E. schrieb:> Ich meine in den Source code Kommentaren gelesen zu haben, dass die> Packete zwei mal verschickt werden. Könnte es sein, dass du schon beim> ersten Packet springst und es deswegen etwas "dauert" bis das Packet auf> dem nächsten Channel ankommt.
Das habe ich auch erst gedacht, aber teilweise hat es Sekunden gedauert
bis das nächste Packet kam. Bei 50 Updates pro Sekunde sollte eigentlich
häufiger was kommen?
Torsten C. schrieb:> Oder sehe ich das zu naiv? Oder lohnt sich die Arbeit nicht?
Ich denke, ich nehme Stapelbare Buchsenleisten und mache 16 Platinen mit
je einem 74HCT238 und acht NRF24L01.
Bis die Platinen von Jakob zurück sind, habt Ihr bestimmt das hopping
schon anders heraus bekommen, oder?
Tim schrieb:> aber teilweise hat es Sekunden gedauert> bis das nächste Packet kam
Ne, das passt wirklich nicht zusammen. Wenn es in der Größenordnung
liegt, dann kann das eigentlich nicht das V202 Protokoll sein.
Torsten C. schrieb:> Bei SPI? Man nehme neun 74HC154 (4,32€).
So ein Scanner wäre vermutlich der beste Ansatz um rauszufinden, wo was
los ist. Oder halt ein Spektrum Analyzer, damit würde man ja auch sehen,
welche Kanäle verwendet werden. Leider decken diese schönen DAB-Dongles
ja nur den Bereich bis 2 GHz ab, sonst wäre das eine Idee.
Naja, ich glaube allerdings nicht, dass man umbedingt für jeden Channel
einen Empfänger braucht. Es muss ja nicht umbedingt das ganze Band
gleichzeitig überwacht werden, um Rückschlüsse zu ziehen. Wahrscheinlich
reicht auch die Hälfte oder ein Viertel aus, um Erkenntnisse zu
extrahieren.
Torsten C. schrieb:> Bis die Platinen von Jakob zurück sind, habt Ihr bestimmt das hopping> schon anders heraus bekommen, oder?
Ich versuche gerade 'mal den den SPI-Bus in der Fernbedienung
anzuzapfen.
Tim schrieb:> Ich versuche gerade 'mal den den SPI-Bus in der Fernbedienung> anzuzapfen.
Das ist sicher mit Abstand vom Hardware Aufwand der günstigste und beste
Weg. Bin gespannt...
Auf dem kleinen "6-Beiner" steht S2M0 oder S2M6 und ne Art Regenbogen
drauf und ist nur ein 5 -Beiner.
Bestimmt ein 3.3V Regler oder ähnlich... Auch von der Belegung und den
C's außenrum..
So, die Leitungen sind angeschlossen. Dabei gab es eine kleine
Überraschung: In meiner Fernbediendung sitzt ein Microcontroller mit
anderer Typenbezeichnung. Konnte man mit bloßem Auge kaum erkennen.
N79E814AS2? ?=Zeichen nicht erkennbar
321002234B?78?2??A
No y. schrieb:> Auf dem kleinen "6-Beiner" steht S2M0 oder S2M6 und ne Art Regenbogen> drauf und ist nur ein 5 -Beiner.>> Bestimmt ein 3.3V Regler oder ähnlich... Auch von der Belegung und den> C's außenrum..
Ja, das kleine SOT23 Ding unten rechts ist mit VDD der MCU verbunden.
Das ist ja wohl ein ziemlich schwachsinniges Design. Gleich zwei
Linearregler in einem Batteriegerät? Da hätte man ja auch gleich ein
paar Batterien weglassen können.
Der eine ist aber ein 5V Regler oder?
Zumindest steht bei mir AMS1117 5.0 S1142 drauf...
Hehe die China Lupen Brille hat sich jetzt schon gelohnt... :D
Warum haben die denn bitte schön enn 80C51 Controller drin...
Nen 2. ARM wäre mir lieber... so brauch man ja noch einen Programmer...
Mein J-Link kann den zumindest anscheinend nicht...
Achja wie ist die Belegung des Funk Moduls? Dann häng ich auch mal nen
LA dran...
Isses denn nu SPI oder I2C?
Philipp E. schrieb:> Das ist sicher mit Abstand vom Hardware Aufwand der günstigste und beste> Weg.
Gut, dass es Dich gibt, Tim.
Torsten C. schrieb:> Wie ist das z.B. mit der Pinbelegung^^? Wiki oder Github?
Ich denke an solchen Beispielen lernen wir schneller, ohne lange
Grundsatzdiskussion.
Tim schrieb:> Das Textfile ins Github und die editierte Tabelle ins Wiki? :)
Das wäre redundant, also Mist! Oder war das ein Augenzwinkern?
Im Wiki kann man schneller mal was dazu schreiben. Versioniert wird
auch. Also: Wohin denn nun?
Georg G. schrieb:> Aber bitte einigt euch.
Sind wir uns denn nun einig?
No y. schrieb:> Isses denn nu SPI oder I2C?
Vielleicht beides^^.
No y. schrieb:> Warum haben die denn bitte schön enn 80C51 Controller drin...>> Nen 2. ARM wäre mir lieber... so brauch man ja noch einen Programmer...>> Mein J-Link kann den zumindest anscheinend nicht...>>> Achja wie ist die Belegung des Funk Moduls? Dann häng ich auch mal nen> LA dran...>> Isses denn nu SPI oder I2C?
Das solltest Du mit einem LA recht schnell erkennen können
Gruß Martin
3.3V
Mosi
SCK
MISO
SE ???
GND
IRQ
Bezeichnungen sind von links nach rechts (Diode Rechts) von oben drauf
geschaut..
Die letzten 3 Pin kann ich net richtig sehen wegen dem Lötpunkt vom
Quarz...
Könnte es jetzt mal noch auslöten... muss aber dann erstmal wieder meine
Lötstation unter dem Bett hervorkramen...
Ok, hier sind erste Ergebnisse:
https://github.com/hackocopter/Documentation/tree/master/RemoteControl/Datalog_RC_SPI
Ich habe den Datenverkehr an der Pins 6-10 der MCU mitgeschnitten. Pin 7
scheint clk zu sein, 6 Data out. Pin 10 ist evtl. nicht richtig
verbunden. Ich habe jeweils einmal nach Einschalten und einmal nach
Binding mitgeloggt. Die Daten gibt es einmal per SPI-Analyzer exportiert
und einmal Roh. Die Rohdaten lassen sich mit "Logic" einlesein:
http://www.saleae.com/logic/features -> downloads
Man kann in dem Log nach dem Einschalten schön sehen, wie die Register
des BK2423 nacheinander initialisiert werden. Um das Channelhopping zu
entschlüssln, müsste man die Logs parsen.
Ich muss jetzt leider weiter. Werde mir das in den nächsten Tagen noch
einmal anschauen. Mit den Daten sollte sich schon einiges anfangen
lassen.
So, habe mal das Protokoll analysiert. Habe jetzt leider keine Zeit mehr
alles im Wiki zu dokumentieren, daher poste ich die Infos gleich hier.
Alles zur freien Verfügung (CC BY-NC-SA)
So, zuerst kurz zur Software, falls jemand die Auswertung nachvollziehen
möchte. Anbei ein kleines Python script, dass die SPI-Daten einließt und
auswertet.
Achtung: Der Code ist in dieser Form kein vollständiger Parser für alle
Befehle, ich habe nur die Dinge implementiert die nötig sind um die
Traces von Tim auszuwerten und das Fernbedienung Protokoll zu
entschlüsseln. Auch verarbeite ich nur MOSI, MISO wird aktuell
ignoriert. Habe die Struktur möglichst einfach gehalten, dürfte daher
sehr einfach sein dass bei Bedarf zu erweitern.
Eingabeformat sind die .txt Dateien aus dem GitRepo die Tim vorhin
gepostet hat. Konkret habe ich verwendet:
https://github.com/hackocopter/Documentation/blob/master/RemoteControl/Datalog_RC_SPI/SPI%20traffic%20after%20binding.txt
Aufruf des Scripts erfolgt mit:
Das Script geht dann alle Daten durch. Um zu erkennen, welche Words zu
einem "Paket" gehören, wird der Timestamp ausgewertet. Sobald die Daten
weiter als 0.001 auseinander liegen*, nehme ich an es handelt sich um
ein neues Packet. Die einzelnen Pakete werte ich dann gemäß Register
Namen aus dem Datenblatt aus dem Git Repo aus. Damit wird es sehr
einfach das Protokoll zu identifizieren.
* Anpassung bei Bedarf durch "threshold" in "groupDataByTime"
Die Ausgabe des Programms sieht dann so aus:
tl;dr;
Abschließend kurz meine Erkenntnisse aus der Auswertung des Traces den
Tim aufgezeichnet hat (ich habe mir nur angeschaut, was nach dem Binden
passiert):
* Die Payload hat eine Länge von 16-Byte
* Das letzte Bit entspricht der Summe aller vorherigen Bits (bzw. den
unteren 16-Bits der Summe)
* Das Datenformat passt zu dem im GitRepo beschriebenen
(https://github.com/hackocopter/Documentation/tree/master/RemoteControl)
* Das Datenformat passt zu der Implementierung des V202 Protokolls in
der Deviation
firmware
(https://bitbucket.org/PhracturedBlue/deviation/src/c960b8ea4e774154ef09968dd187c07651b7f9fc/src/protocol/v202_nrf24l01.c?at=default)
-> es handelt sich um das V202 Protokoll
Zum Channel Hopping:
* jedes Packet wird zweimal versendet
* es immer 16-Channel durchgehoppt (dann gehts wieder von vorne los)
* auch das passt zur Implementierung in der Deviation firmware
Die Sequenz in den Daten:
Da die Checksum immer gleich ist, kann ich nichts dazu sagen, ob das
Hopping von ihr abhängt. In der Deviation firmware sieht es nicht so
aus. Um das zu prüfen bräuchte man mal einen SPI-Trace in dem etwas mehr
passiert (Stick Bewegung o. Ä.) damit sich die Checksum ändert.
So, nun muss ich aber dringend ins Bett ;-)
Eingabe Datei:
https://github.com/hackocopter/Documentation/blob/master/RemoteControl/Datalog_RC_SPI/SPI%20traffic%20after%20binding.txt)
Ergebniss Dateien im Anhang
Torsten C. schrieb:> Ist Cut&Paste hier einfacher als dort?
Nein, aber beim Wiki hätte ich gerne besser / genauer dokumentiert, und
dazu hab ich gerade nicht so die Zeit ;-)
Habe aber die Quintessenz schonmal in den Artikel gepackt.
Hallo!
Ich hab hier noch ein Werbeblättchen von Nuvoton gefunden. Das wurde
2011 auf der embedded verteilt. Die M051-Serie ist nicht, wie man denken
könnte ein 8051-Derivat, sondern ein low-cost Cortex-M0. Außerdem ist
eine Liste dabei, von Firmen die das Zeug hier A und D verticken wollen
(oder wollten?).
Grüße
Jens
Hier noch einmal eine wichtige Info:
Der Microcontroller in der Fernbedienung ist ein 8051 Derivat. Auch wenn
sich die Beschriftung hier* nur vollständig lesen lässt, muss es sich um
einen N79E814AS20 handeln. Die Bausteine mit den anderen
Beschriftungen sind dann evtl. vom Hersteller programmierte Bausteine.
(Also Maske, OTP oder Flash)
Das Datenblatt scheint es nur auf Chinesisch zu geben?!? Hier:
http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=c60884e1-c6a9-45da-8268-6be8b32e9cf2
Die Peripherie sieht der des MINI54ZAN sehr ähnlich. Da hat man wohl
viel wiederverwendet.
"The N79E815A/814A/8132A 8-bit Turbo 51 (4T Mode) microcontroller is
embedded with 16K/8K/4K bytes Flash EPROM which can be programmed
through universal hardware writer, serial ICP (In Circuit Program)
programmer, software ISP function. The instruction sets of the
N79E815A/814A/8132A are fully compatible with the standard 8052. The
N79E815A/814A/8132A contains 16K/8K/4K bytes Application Flash EPROM
(APROM) memory, 4 Kbytes Data Flash memory, and 2 Kbytes Load Flash
EPROM (LDROM) memory; 256 bytes direct and indirect RAM, 256 bytes XRAM;
25 I/O with bit-addressable I/O ports; two 16-bit timers/counters;
8-channel multiplexed 10-bit A/D converter; 4-channel 10-bit PWM; three
serial ports including a SPI, I2C and an enhanced full duplex serial
port; 2-level BOD voltage detection/reset, and power-on reset (POR). The
N79E815A/814A/8132A also supports internal RC oscillator at the nominal
frequency of 22.1184 MHz. The accuracy of RC oscillator (22.1184 MHz) is
trimmed as ±1% under the condition of room temperature and VDD = 5V
before shipping from by factory trimming mechanism. These peripherals
are supported by 14 sources of four-level interrupt capability. To
facilitate programming and verification, the Flash EPROM inside the
N79E815A/814A/8132A allows the program memory to be programmed and read
electronically. Once the code is confirmed, the user can protect the
code for security."
*Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter"
Philipp E. schrieb:> Abschließend kurz meine Erkenntnisse aus der Auswertung des Traces den> Tim aufgezeichnet hat (ich habe mir nur angeschaut, was nach dem Binden> passiert):
Wow, super Arbeit! Dann ist es also doch nur ein 16 Channel Schema. Wenn
man die Kanäle des Senders mit den empfangenen vergleicht, scheint es
zumindest vom Bereich zu passen. Es muss aber noch ein anderes Problem
geben. Entweder habe ich den nRF24 nicht richtig angesteuert oder die
Trennschärfe ist doch nicht ideal.
Philipp E. schrieb:> Da die Checksum immer gleich ist, kann ich nichts dazu sagen, ob das> Hopping von ihr abhängt. In der Deviation firmware sieht es nicht so> aus.
Ja, ich weiss auch nicht mehr woher ich das hatte. Anscheinend ist es
doch ein statisches Schema. Habe den Hinweis wieder entfernt.
Der N79E814 pass vom Pinning her besser in die Schaltung. Die Abfrage
der Taster wird damit erklärbar.
Der 5-Beiner "S2M?" kann ein Spannungsregler sein.
Es gibt den AMS1117, der die Batteriespannung auf 5V regelt.
Dann ist unterhalb des Knüppels auf der S11 Seite ein SOT223 zu sehen
(Typ nicht zu entziffern), der ein Spannungsregler sein wird. Den Layout
nach macht er die Versorgung der CPU.
Der 5-Beiner ist nur für das RF-Modul zuständig.
Frage: An den oberen Ecken sind zwei ??? mit Drähten angeschlossen. Die
Lötpunkte sind mit MODE1 und MODE2 bezeichnet. Sie werden zusammen mit
den Tastern abgefragt. Wozu sind sie da?
No y. schrieb:> Die anderen gehen nicht an den MCU
Kannst du das bitte noch mal nachprüfen? Laut meinem Foto geht eine
Leitung zwischen den Beinen der LED durch zum Modul.
Kann bitte mal jemand ausklingeln, wohin das zweite LED Bein führt? Die
Leitung geht zum Widerstand R5 (eine Drahtbrücke) und versickert dann
unter der CPU.
Die N79E814 Prozessoren gibt es übrigens bei Aliexpress für 10.- per 10
Stück. Da kann man das Original auslöten und aufheben. Fehlt nur eine
gute Fassug für das Ding :-)
Die Leitung die zwischen den LED Pins durchgeht ist die CSN.
Die geht einmal an die MCU wie bereits geschrieben und zum anderen auf
den Widerstand.
Die LED Leitung kommt auf der anderen Seite des MCu wieder raus. geht da
auf das obere Pad des Widerstandes direkt neben dem Chip den 1k.
Und dann über den Widersatnd an PIN 11 der MCU.
Anbei das Schaltbild der Fernbedienung. Es fehlen noch die zwei
Spannungsregler für CPU und RF-Modul und die Bauteilwerte teilweise.
Kennt jemand einen 5-beinigen SOT??? Spannungsregler? Dann nehme ich den
stellvertretend.
Das Eagle File liegt auf Github
Die Fernbedienung und der Quadrocopter arbeiten nach dem gleichen
Algorithmus. Beide habe eine Tabelle [4 Reihen mit je 16 "magischen"
Zahlen (siehe Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter", um
aus dieser mittels der ID der Fernbedienung die 16 Kanäle zu generieren.
Die Checksumme enthält für das Hopping keine weiteren Informationen, sie
ist lediglich die Summe der vorhergehenden Bytes modulo 0x100.
Beispiel:
Packet: 00 00 00 00 40 40 40 1F E4 75 00 00 00 00 00 38
Die Summe der Bytes 0 bis 14 ist 0x238. 0x238 % 0%100 = 0x38
Wahnsinn Leute, hier gehts ja ordentlich voran. Toll!
Davis schrieb:> Die Checksumme enthält für das Hopping keine weiteren Informationen, sie> ist lediglich die Summe der vorhergehenden Bytes modulo 0x100.Philipp E. schrieb:> * Das letzte Bit entspricht der Summe aller vorherigen Bits (bzw. den> unteren 16-Bits der Summe)
Genau. Allerdings ist immer noch etwas unklar, wie er die Hopping
Sequenz auswählt.
Der Code:
1
u8sum;
2
tx_id[0]=(id>>16)&0xFF;
3
tx_id[0]=(id>>8)&0xFF;
4
tx_id[0]=(id>>0)&0xFF;
5
sum=tx_id[0]+tx_id[1]+tx_id[2];
6
// Base row is defined by lowest 2 bits
7
constu8*fh_row=freq_hopping[sum&0x03];
der die Reihe auswählt und läd scheint mir etwas wirr, die ersten zwei
Zuweisungen sind ja ohne Effekt. Vielleicht hat da jemand vergessen den
Array Index anzupassen.
Also auf die schnelle konnte ich das Hopping Schema aus Tims Trace nicht
mit der Tabelle oben abgleichen, habe da aber auch nur sehr
oberflächlich geschaut.
Georg G. schrieb:> Anbei das Schaltbild der Fernbedienung. Es fehlen noch die zwei> Spannungsregler für CPU und RF-Modul und die Bauteilwerte teilweise.
Ziemlich interessant. Wenn man die FB mit 6x1.5V Batterien bestückt,
dann dienen zwei davon nur dazu den Linearregler aufzuheizen. 4
Batterien könnten also reichen, wenn sie voll sind.
Hat schon einmal jemand geschaut, ob am LCD-Port auch Signale ankommen?
Tim schrieb:> Linearregler aufzuheizen
Und aus den stabilisierten 5V werden dann zweimal 3.3V gemacht für CPU
und RF Modul. Da ist noch reichlich Potential zum Optimieren.
Ein LiIon Akku würde ausreichen.
Wenn die Indizes von tx_id korrigiert werden, dann funktioniert der
Algorithmus (siehe unten). Die berechneten Werte stimmen mit den
beobachteten überein.
Zeile 9: "f_row" ist ein Zeiger auf eine Zeile mit 16 Bytes.
Zeile 11: "increment" wird ein 3 Bit Wert zugewiesen.
Zeile 12: "val" bekommt 1 Byte aus der Tabelle plus dem "increment" als
Kanal zugewiesen.
Zeile 15: Dieser wird im Array "rf_channels" abgelegt. Liegt der Kanal
an einer 16er Grenze,
dann wird der Kanal um 3 verringert.
1
staticconstu8freq_hopping[][16]={
2
{0x27,0x1B,0x39,0x28,0x24,0x22,0x2E,0x36,
3
0x19,0x21,0x29,0x14,0x1E,0x12,0x2D,0x18},// 00
4
{0x2E,0x33,0x25,0x38,0x19,0x12,0x18,0x16,
5
0x2A,0x1C,0x1F,0x37,0x2F,0x23,0x34,0x10},// 01
6
{0x11,0x1A,0x35,0x24,0x28,0x18,0x25,0x2A,
7
0x32,0x2C,0x14,0x27,0x36,0x34,0x1C,0x17},// 02
8
{0x22,0x27,0x17,0x39,0x34,0x28,0x2B,0x1D,
9
0x18,0x2A,0x21,0x38,0x10,0x26,0x20,0x1F}// 03
10
};
11
12
13
1staticvoidset_tx_id(u32id)
14
2{
15
3u8sum;
16
4tx_id[0]=(id>>16)&0xFF;
17
5tx_id[0]=(id>>8)&0xFF;
18
6tx_id[0]=(id>>0)&0xFF;
19
7sum=tx_id[0]+tx_id[1]+tx_id[2];
20
8// Base row is defined by lowest 2 bits
21
9constu8*fh_row=freq_hopping[sum&0x03];
22
10// Higher 3 bits define increment to corresponding row
23
11u8increment=(sum&0x1e)>>2;
24
12for(u8i=0;i<16;++i){
25
13u8val=fh_row[i]+increment;
26
14// Strange avoidance of channels divisible by 16
27
15rf_channels[i]=(val&0x0f)?val:val-3;
28
16}
29
17}
1. Fall
sum = 0x1F + 0xE4 + 0x75; // 0x178 ergibt bei U8 0x78 0111 1000
*fhrow zeigt auf die 0. Reihe
{ 0x27, 0x1B, 0x39, 0x28, 0x24, 0x22, 0x2E, 0x36, 0x19, 0x21, 0x29,
0x14, 0x1E, 0x12, 0x2D, 0x18 }, // 00
"increment" ist 0110 0x06
Davis schrieb:> Die berechneten Werte stimmen mit den> beobachteten überein.
Genau. Hatte gestern Nacht das increment falsch bestimmt. Jetzt passt
alles. Super, damit ist das Protokoll geklärt.
Abschließend frage ich mich noch, wie der Empfänger im Copter das
Hopping Schema ermittelt. Also ich meine, am Anfang weiß er ja nicht,
welche ID der Sender hat und kennt daher nicht das konkret verwendete
Schema. Sobald er die ID kennt, ist ja alles klar.
Vermutlich lauscht der zu Beginn auf einem oder mehreren festen Channeln
und wartet ab ob dort das "Bind"-Packet vorbeikommt. Dann hat er alle
Infos und es kann losgehen. Was meint ihr?
Philipp E. schrieb:> Vermutlich lauscht der zu Beginn auf einem oder mehreren festen Channeln> und wartet ab ob dort das "Bind"-Packet vorbeikommt. Dann hat er alle> Infos und es kann losgehen. Was meint ihr?
Vielleicht kann man ja anhand der Kanalnutzung nach dem Einschalten der
FB erkennen, welche Kanäle für das Binding relevant sind?
Es gibt in jeder Reihe einen Kanal 0x18. Also lauscht der Copter
nacheinander, jeweils für eine bestimmte Zeit, auf den Kanälen 0x18 bis
0x1F.
Ein fester Binding-Kanal wäre auch eine Möglichkeit.
Philipp E. schrieb:> Vermutlich lauscht der zu Beginn auf einem oder mehreren festen Channeln> und wartet ab ob dort das "Bind"-Packet vorbeikommt. Dann hat er alle> Infos und es kann losgehen.Davis schrieb:> Es gibt in jeder Reihe einen Kanal 0x18. Also lauscht der Copter> nacheinander, jeweils für eine bestimmte Zeit, auf den Kanälen 0x18 bis> 0x1F.
Damit wäre dann auch das geklärt. Fein. Damit wäre es nun auch möglich
den Copter ohne weitere Anpassungen an der Firmware via PC / Smartphone
zu steuern. Coole sache...
Wollte mir dann auch mal zwei bis drei der Dinger zu legen. Gibt es
einen Link, den ihr aktuell empfehlt? Möglichst billig... Oder lohnt es
noch auf diese Sammelbestellung zu warten oder ist das gestorben?
Für die Freunde des Arduino habe ich mal einen ersten, unbeholfenen
Entwurf einer Empfangsroutine angehängt die mit meinen Fernbedienungen
funktioniert. Erste Spalte ist die Zeit in ms zwischen zwei Reads,
danach die payload und der gelesene Kanal. Bei Änderung des Throttle:
1
9 FE 00 00 00 40 40 40 AB D5 87 00 00 00 00 00 C5 Hop 15 -> 29
2
8 FE 00 00 00 40 40 40 AB D5 87 00 00 00 00 00 C5 Hop 0 -> 35
3
8 FC 00 00 00 40 40 40 AB D5 87 00 00 00 00 00 C3 Hop 1 -> 40
Helmut H. schrieb:>Für die Freunde des Arduino habe ich mal einen ersten, unbeholfenen>Entwurf einer Empfangsroutine angehängt die mit meinen Fernbedienungen
Sauber! Dann wissen wir ja schon, wie der RX-Teil der Quadrocopter
Firmware aussehen muss. Wenn alle 8ms ein "hop" kommt heisst das, das
alle 4ms ein Datenpaket gesendet wird. -> 250Hz. Damit ist der
Controller schon gut beschäftigt.
Da das Protokoll ja tatsächlich das V202 Protokoll ist, kann also auch
die schon existierende Software genutzt werden.
Hier gibt es ein Arduino-Sketch, welches eine V202 Fernbedienung
emuliert:
https://bitbucket.org/rivig/v202/src/
Download:
https://bitbucket.org/rivig/v202/get/c2142a790c46.zip
Man benötigt nur ein nRF24L01+-Modul. Die Stickpositionen werden auf den
Analogeingängen ausgelesen. Man könnte das aber leicht ändern, um z.B.
über die serielle SChnittstelle vom PC aus zu steuern.
Tim schrieb:> Man benötigt nur ein nRF24L01+-Modul. Die Stickpositionen werden auf den> Analogeingängen ausgelesen. Man könnte das aber leicht ändern, um z.B.> über die serielle SChnittstelle vom PC aus zu steuern.
Das ist natürlich super. Das bietet sich doch dann super an, um sich mal
mit Motor PWM Werten und so heranzutasten (über den PC Werte senden).
Dann kann man mal ein Gefühl für das Verhalten des Teils bekommen.
Meiner dürfte übrigens beim Zoll sein, hab schon eine Benachrichtigung
bekommen. Die haben wohl nicht geglaubt, dass der steuerfrei eingeführt
werden kann hier :(
Das Schaltbild (5 Seiten A4) ist soweit komplett, dass man darauf
basierend Software beginnen kann.
Wenn ich Zeit habe, werde ich es (in einigen Wochen) komplettieren. Das
Eagle File liegt auf Github. Die Lib mit den Spezialteilen kann man sich
aus dem Schaltbild per ULP ziehen.
@Georg G:
Vielleicht liegt's nur an mir, aber irgendwie verstehe ich nicht, wie
man über diese MOxSEN Anschlüsse irgendwas messen soll. Hab mich schon
letztens gewundert beim Foto der Platine, ob ich irgendwas falsch sehe,
aber hier im Schaltplan sieht's genauso aus.
Wir haben offenbar eine "optimierte Bestückung" erwischt. Ursprünglich
waren zwischen MOxSEN und dem dazu gehörenden Drain (vermutlich)
Widerstände geschaltet. Damit hätte man dann in den Aus-Phasen der PWM
die Generatorspannung des Motors und damit die Drehzahl messen können.
Aber im Zuge der Entwicklung wurde das eingespart oder es war eine dumme
Idee gewesen oder ...
Georg G. schrieb:> Wir haben offenbar eine "optimierte Bestückung" erwischt. Ursprünglich> waren zwischen MOxSEN und dem dazu gehörenden Drain (vermutlich)> Widerstände geschaltet. Damit hätte man dann in den Aus-Phasen der PWM> die Generatorspannung des Motors und damit die Drehzahl messen können.> Aber im Zuge der Entwicklung wurde das eingespart oder es war eine dumme> Idee gewesen oder ...
Das muss eine Luftadmittanz sein :)
Irgendwie ist es aber schon bizarr. Es kann ja schon sein, dass man
während der Entwicklung festgestellt hat dass es auch ohne die
Sense-Eingänge geht. Aber warum sind dann die Widerstände bestückt, die
die ADC-Eingänge mit Masse verbinden?
Tim schrieb:> Wenn alle 8ms ein "hop" kommt heisst das, das> alle 4ms ein Datenpaket gesendet wird. -> 250Hz. Damit ist der> Controller schon gut beschäftigt.
Da ist einiges Los over the air. Aber es reicht ja wenn wir auf jedes
zweite Datenpacket reagieren.
Sobald ein Packet da ist hoppen wir auf den nächsten channel. Dann kommt
erstmal noch 1 Paket auf dem aktuellen Channel (davon bekommen wir gar
nix mehr mit, ist auch egal, weil das haben wir ja schon) Und dann kommt
1 Paket auf dem nächsten Channel (auf den wir gehoppt sind). Also alle 8
ms ein für uns relevantes Packet -> 125 Hz
Weiterhin hat der nrf chip eine interne Queue, so dass es nicht auf jede
µs ankommt. Der Remote Task sollte allerdings in jedem Fall alle 8ms mal
in die Queue schauen, denn sonst verpassen wir einen Hop und dann ist
der Sync hin und wir verlieren erstmal 16 Packete (128 ms), was unter
Umständen reicht das Ding zum Absturz zu bringen.
Georg G. schrieb:> Das Schaltbild (5 Seiten A4) ist soweit komplett, dass man darauf> basierend Software beginnen kann.
Georg, noch einmal vielen Dank für das Erstellen der Schaltung. Damit
kommen wir deutlich weiter. Und Deine Eagle-Künste gehen über die
meinigen eindeutig hinaus.
Ja ist der richtige..
Aber kauf lieber erstmal einen...
Dann nächste Woche wieder einen...
Dann übernächste wieder einen...
Sonst lohnt es sich nämlich wegen den Steuern nicht...
Philipp E. schrieb:> Tim schrieb:>> Wenn alle 8ms ein "hop" kommt heisst das, das>> alle 4ms ein Datenpaket gesendet wird. -> 250Hz. Damit ist der>> Controller schon gut beschäftigt.> Weiterhin hat der nrf chip eine interne Queue, so dass es nicht auf jede> µs ankommt. Der Remote Task sollte allerdings in jedem Fall alle 8ms mal> in die Queue schauen, denn sonst verpassen wir einen Hop und dann ist> der Sync hin und wir verlieren erstmal 16 Packete (128 ms), was unter> Umständen reicht das Ding zum Absturz zu bringen.
In einer Custom-Firmware könnte man auch auf einen Kanal gehen und die
Auto-Ack Funktion verwenden, wie es beim Crazyflie gemacht wird. Dann
ist die Verbindung zwar nicht mehr so Störungssicher, aber man bekommt
automatisch einen Rückkanal.
Hast Du eigentlich auch mal mein Dump nach dem Einschalten durch Deinen
Parser geschickt? Dadurch könnte man in Erfahrung bringe, welche Kanäle
beim Binding verwendet werden.
Tim schrieb:> In einer Custom-Firmware könnte man auch auf einen Kanal gehen und die> Auto-Ack Funktion verwenden, wie es beim Crazyflie gemacht wird. Dann> ist die Verbindung zwar nicht mehr so Störungssicher, aber man bekommt> automatisch einen Rückkanal.
Ganz genau. So würde ich es auch gerne machen. Ich hatte vor ein paar
Beiträgen geschrieben, dass ich persönlich Teile der Crazyflie Firmware
verwenden möchte. Vor allem der PC-Client mit dem Rückkanal hat es mir
sehr angetan. Damit wird das Entwickeln und Abstimmen von Reglern und Co
sicher viel Freude machen. Habe mir als Dongle dazu:
http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=300975449625&clk_rvr_id=550780063776
bestellt. Damit wird der Rückkanal ja Pflicht. Channel Hopping geht dann
zwar auch, aber so viel zur Robustheit wie aktuell trägt es dann nicht
mehr bei.
Allerdings fände ich es schön, wenn die Firmware auch weiter die Option
(also Compiler Switch o. Ä.) bietet, den beiliegenden Receiver zu
verwenden. Aber das Protokoll ist ja nun bekannt.
Tim schrieb:> Hast Du eigentlich auch mal mein Dump nach dem Einschalten durch Deinen> Parser geschickt? Dadurch könnte man in Erfahrung bringe, welche Kanäle> beim Binding verwendet werden.
Ne, das wollte ich aber noch tun. Wollte aber vorher fragen, ob die
Traces soweit vollständig sind. Wie war der Status als das Logging
gestartet wurde und wie als es Endete? Also für das File: SPI traffic
during binding.txt
Vorher: Copter und RC angeschaltet, nichts gedrückt?
Nachehr: Binding abgeschlossen?
Georg G. schrieb:> Das Schaltbild (5 Seiten A4) ist soweit komplett, dass man darauf> basierend Software beginnen kann.
Danke Georg! Großartige Arbeit!!!
Philipp E. schrieb:> Ganz genau. So würde ich es auch gerne machen. Ich hatte vor ein paar> Beiträgen geschrieben, dass ich persönlich Teile der Crazyflie Firmware> verwenden möchte. Vor allem der PC-Client mit dem Rückkanal hat es mir> sehr angetan. Damit wird das Entwickeln und Abstimmen von Reglern und Co> sicher viel Freude machen. Habe mir als Dongle dazu:>> http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=300975449625&clk_rvr_id=550780063776>> bestellt. Damit wird der Rückkanal ja Pflicht. Channel Hopping geht dann> zwar auch, aber so viel zur Robustheit wie aktuell trägt es dann nicht> mehr bei.
So ein Dongle habe ich auch. Wir sollten uns tatsächlich mal Gedanken
machen, wie man das ganze strukturiert angeht. Mein Vorschlag wäre, in
Stufen vorzugehen. Das hat auch den Vorteil, dass man sich die Arbeit
besser teilen kann.
1) Firmware für das Dongle entwickeln, welche einen unmodifizierten
Copter steuern kann. Dazu könnte man auf das Arduino-Sketch von oben
aufsetzen. Man könnte hier mit RS232+AVR+nRF24L01 gleich in Ansi-C
loslegen und den Code später auf SDCC und 8051 portieren damit er auf
dem Dongle läuft.
2) Endlich den Copter entsperren (Das BU-link müsste langsam mal
angekommen)
3) Eine bestehende Firmware auf den Copter portieren und für das V202
Protokoll adaptieren. Eine Möglichkeit wäre Bradwii
(http://www.rcgroups.com/forums/showthread.php?t=1922403) von der es
bereits einen ARM-Port gibt. Wenn man einige Optionen nicht
mitcompiliert passt die Firmware bereits jetzt in 16kb.
4) Dongle und Firmware an neues Protokoll anpassen. Firmware mit
Rückkanal optimieren.
5) Die Copter HW erweitern.



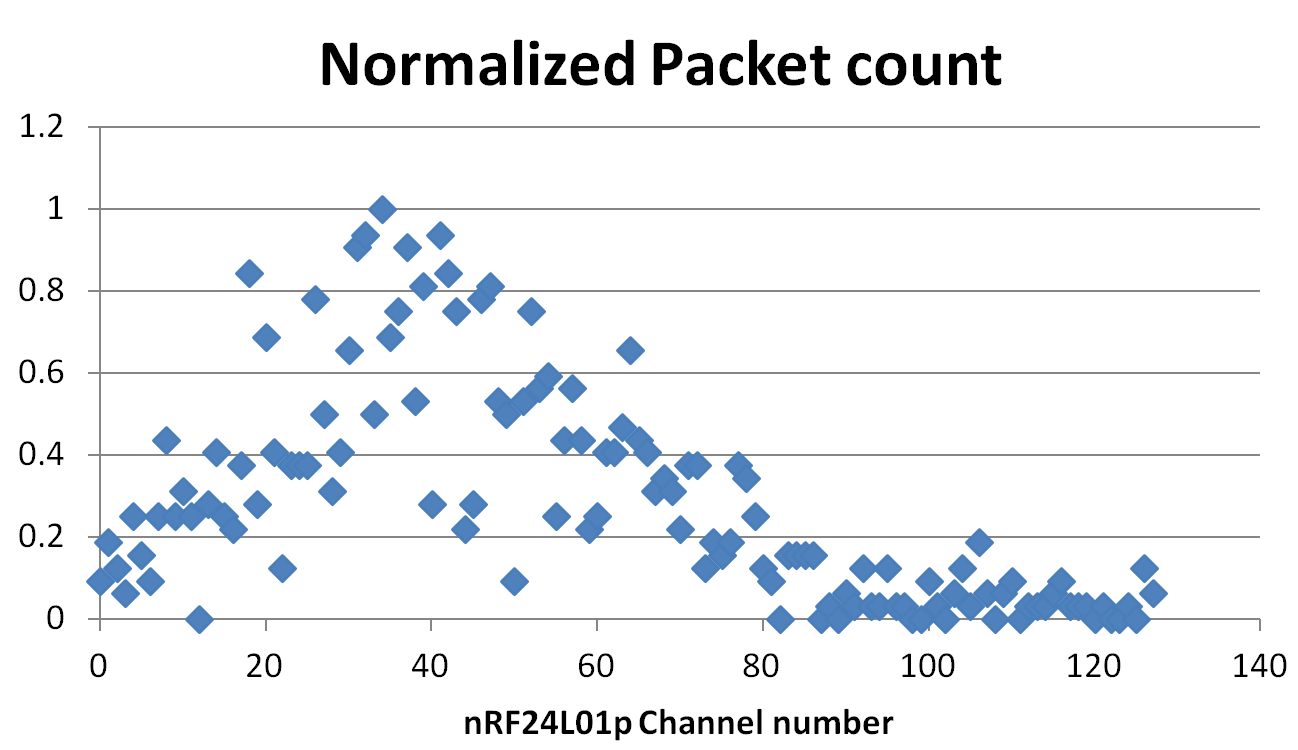

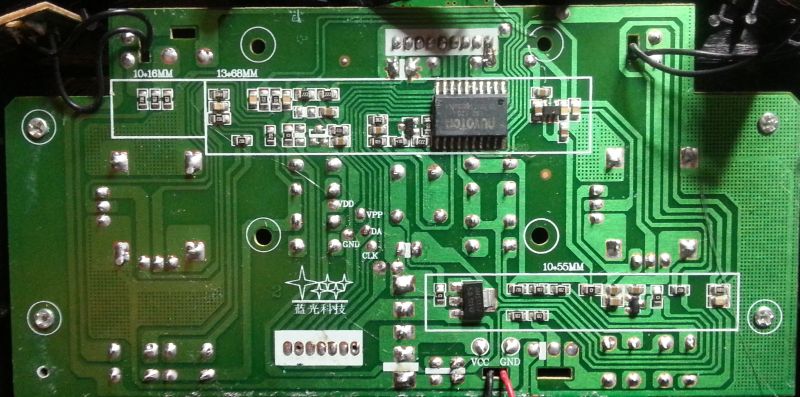

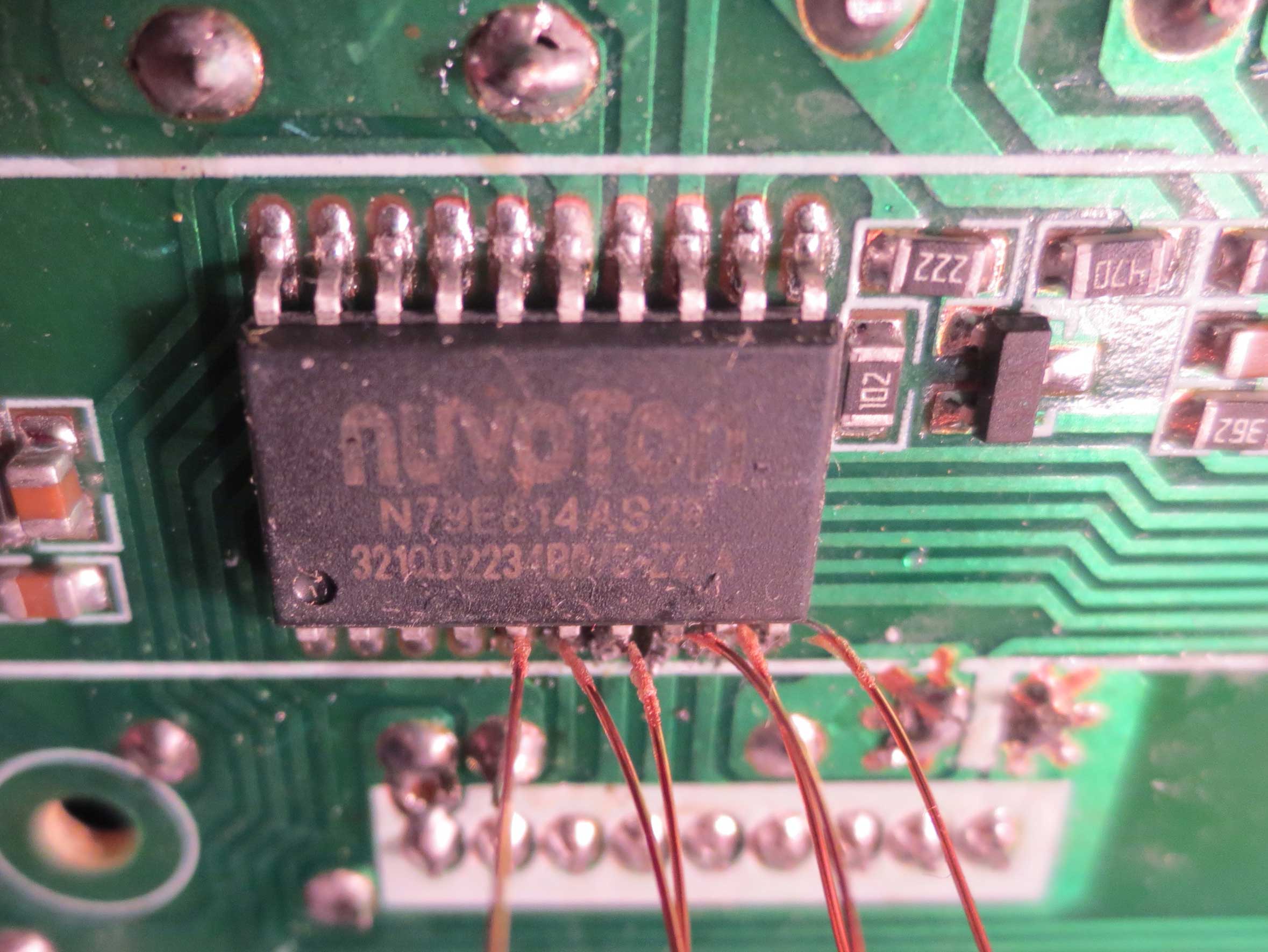

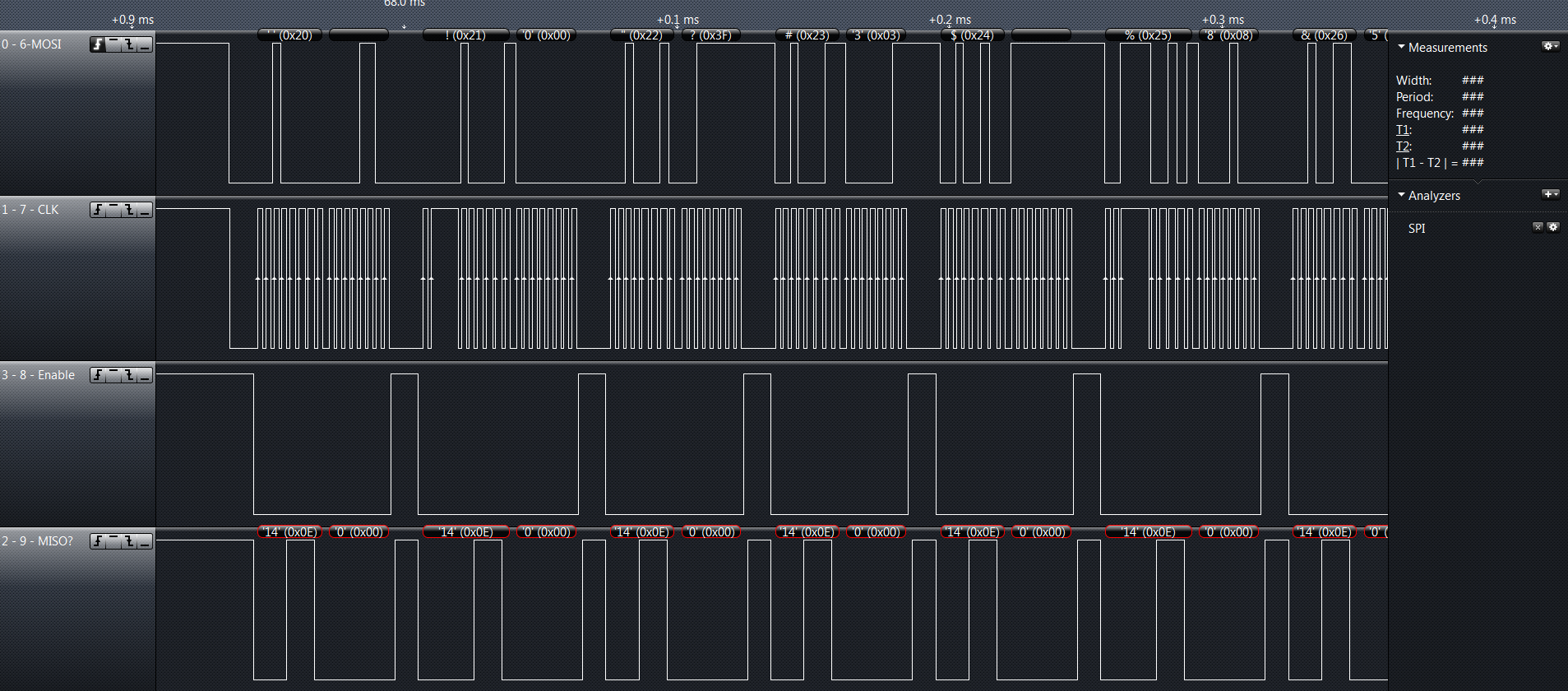


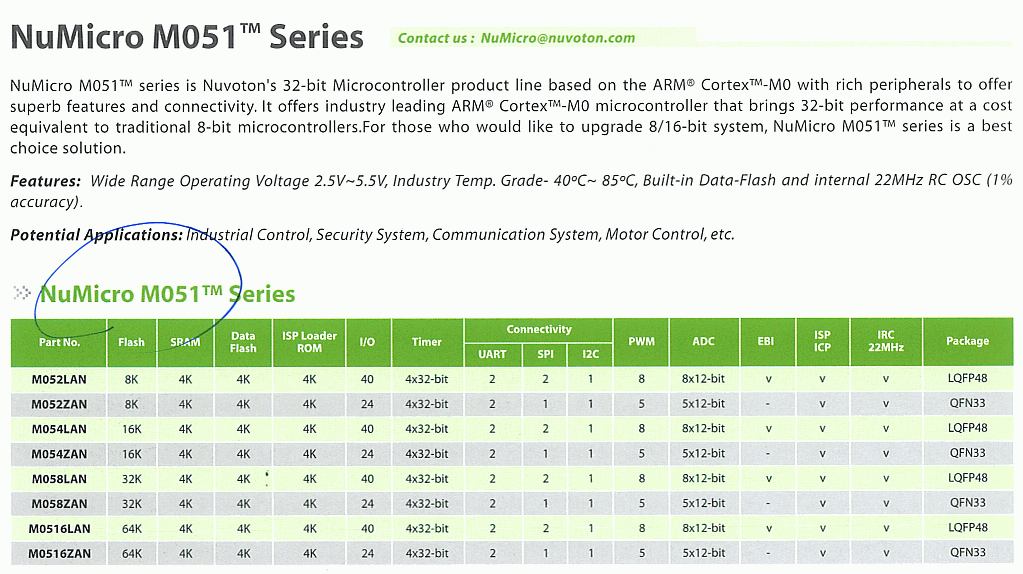

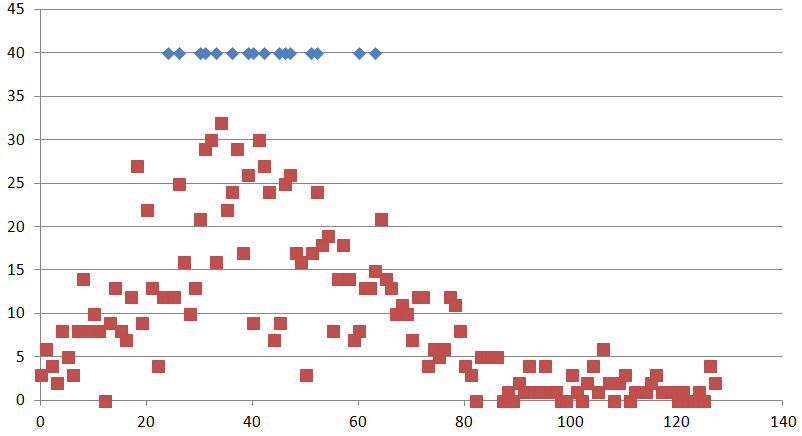
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
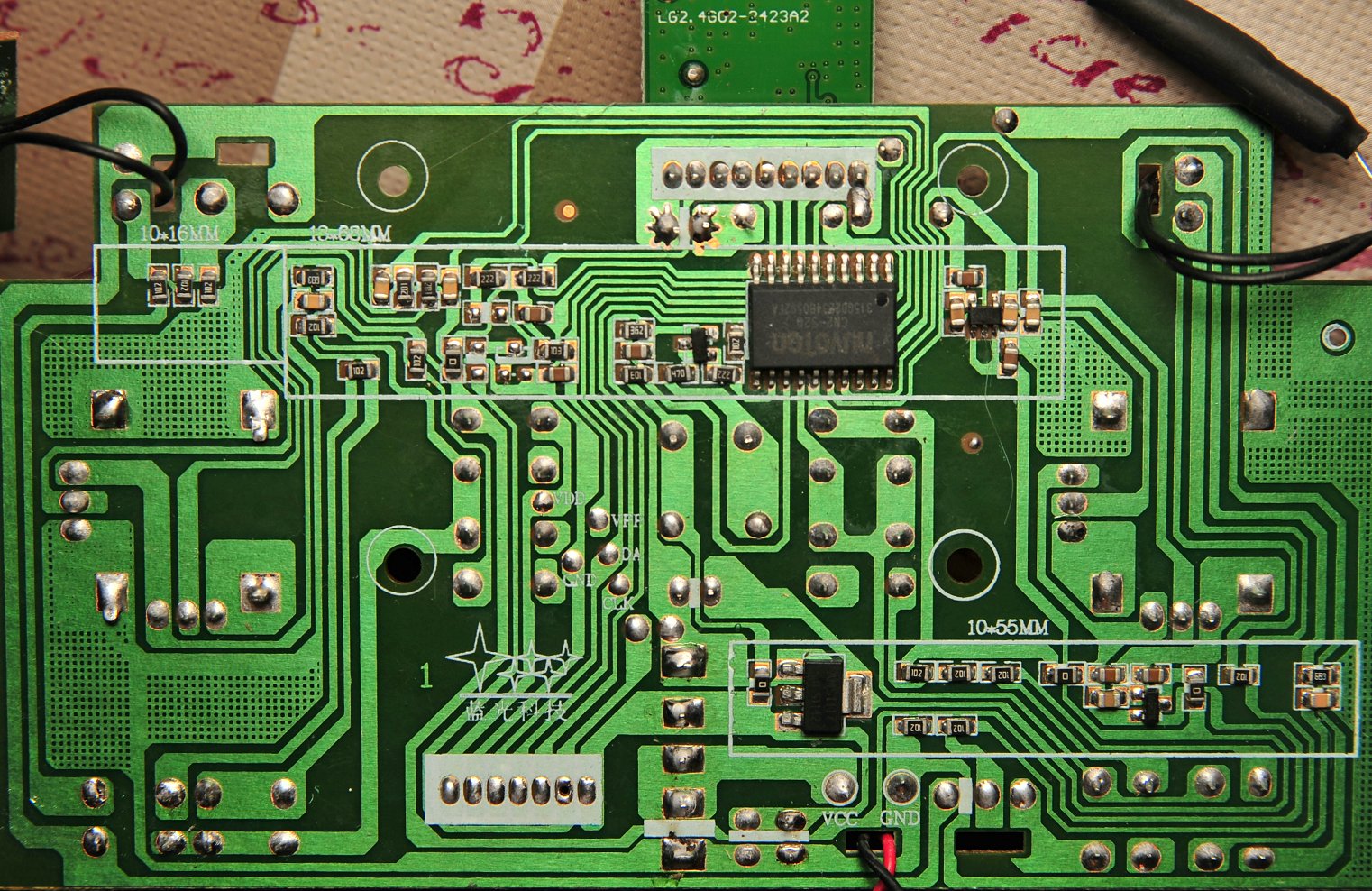{kind=link}