Hallo zusammen, ich wollte einen DC-Getriebemotor, PWM gesteuert, rechts / links laufen lassen können. Das heisst mit verschiedenen, per Hand, einstellbaren Geschwindigkeiten. Ein Handencoder ( so nenne ich ihn ) bzw. Drehgeber (auch Inkrementaldrehgeber, Quadraturencoder, Drehencoder, Drehimpulsgeber genannt) schien mir dazu bestens geeignet. Daraus ist das folgende AVR8-Assemblerprogramm für einen ATmega88PA im Auslieferungszustand enstanden, das mittels ATMEL STUDIO 7 programmiert wurde. Es verwendent lediglich vier Vergleiche um die Handencoderdrehrichtung zu erkennen. Arbeit also nicht mit der üblichen LUT programmierweise. Alle weiteren Informationen in der Header.inc & Hardware.inc Als Vorlagen bzw. wie man so etwas überhaupt realisieren kann diente mir : https://www.mikrocontroller.net/articles/Drehgeber und Vorallem Hannes Lux sein Programmausschnitt Beitrag "Re: Hilfe zu Drehencoder-Auswertung nach Wiki" Bernd_Stein
Angehängte Dateien:
-

Panasonic_Encoder_Sch.jpg
150 KB
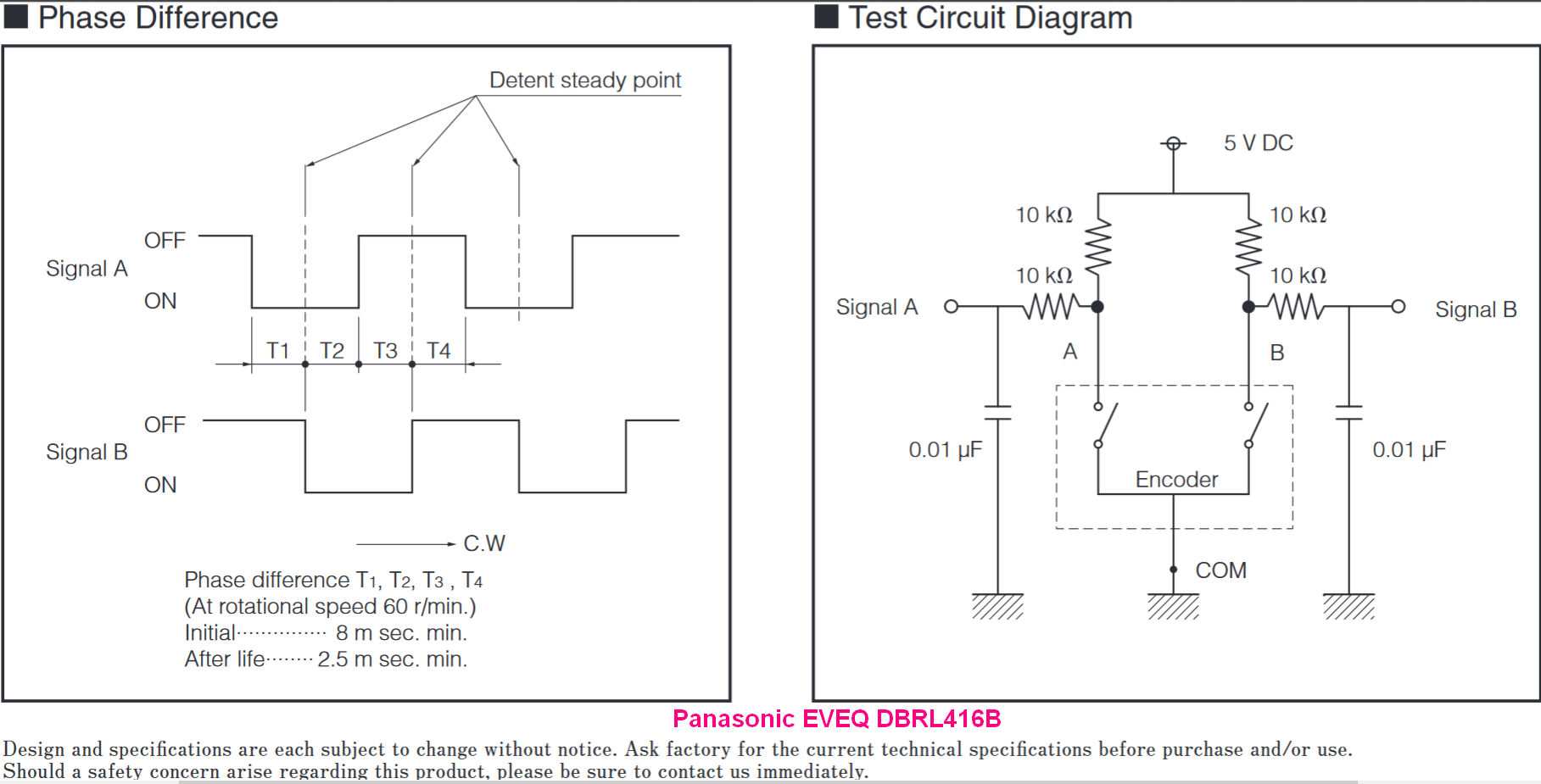
Ach, habe vergessen zu erwähnen, das der Handencoder von *Panasonic EVEQ DBRL416B* beim nach links drehen, also gegen den Uhrzeigersinn ( C.C.W ) in einer oder einigen Raststellungen ziemlich heftig prellt. Die B-Spur schaltet nämlich direkt an den Rastungen und dies führt in einigen Raststellungen zum sofortigen Schalten bei minimalem Drehwinkel. Man kann das Programm auch sehr gut zum Testen von Handencodern benutzen. In jeder Raststellung dreht man mehrmals eine Rastung vor und wieder zurück und sieht sich dabei an was die LEDs an PortB machen. Der Encoder ist wie im DB gezeigt beschaltet. Bernd_Stein
Bernd S. schrieb: > Ach, habe vergessen zu erwähnen, das der Handencoder von *Panasonic EVEQ > DBRL416B* > beim nach links drehen, also gegen den Uhrzeigersinn ( C.C.W ) in einer > oder einigen Raststellungen ziemlich heftig prellt. Dagegen hilft die passende Auswertung. https://www.mikrocontroller.net/articles/Drehgeber#Dekoder_f.C3.BCr_Drehgeber_mit_wackeligen_Rastpunkten Geht auch in Assembler.
Hmmm, 12 Warnung sind nicht so dolle für so ein kleines Projekt.
1 | Severity Code Description Project File Line |
2 | Warning .def: 'YH' redefinition (r29->r29) Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 67 |
3 | Warning .def: 'XH' redefinition (r27->r27) Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 65 |
4 | Warning .def: 'XL' redefinition (r26->r26) Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 64 |
5 | Warning .def: 'YL' redefinition (r28->r28) Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 66 |
6 | Warning .def: 'ZH' redefinition (r31->r31) Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 69 |
7 | Warning .def: 'ZL' redefinition (r30->r30) Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 68 |
8 | Warning Register r26 already defined by the .DEF directive Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 64 |
9 | Warning Register r27 already defined by the .DEF directive Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 65 |
10 | Warning Register r28 already defined by the .DEF directive Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 66 |
11 | Warning Register r29 already defined by the .DEF directive Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 67 |
12 | Warning Register r30 already defined by the .DEF directive Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 68 |
13 | Warning Register r31 already defined by the .DEF directive Einfache Motorsteuerung C:\Users\Brunner.000\Downloads\Einfache Motorsteuerung\Header.inc 69 |
Falk B. schrieb: > Dagegen hilft die passende Auswertung. > > https://www.mikrocontroller.net/articles/Drehgeber#Dekoder_f.C3.BCr_Drehgeber_mit_wackeligen_Rastpunkten > > Geht auch in Assembler. > Dann mach mal ;-) Wie bereits erwähnt kenne ich den Artikel. > > Hmmm, 12 Warnung sind nicht so dolle für so ein kleines Projekt. > Hmm, das hätte ich jetzt nicht von dir erwartet, dass du nicht erkennst das diese Warnungen lediglich kommen, weil die X,Y und Z-Register die wahrscheinlich in der .def schon so benannt worden sind, ich ebenfalls so benannt habe ( r26 -> xl, r27 -> xh usw. ). Bernd_Stein
Bernd S. schrieb: > Wie bereits erwähnt kenne ich den Artikel. Warum nutzt du sinnvolle Konzepte nicht, wenn du sie schon kennst? > Hmm, das hätte ich jetzt nicht von dir erwartet, dass du nicht erkennst > das diese Warnungen lediglich kommen, weil die X,Y und Z-Register die > wahrscheinlich in der .def schon so benannt worden sind, ich ebenfalls > so benannt habe ( r26 -> xl, r27 -> xh usw. ). Natürlich hat er das verstanden. Was du allerdings nicht verstehst: Warnungen sind da, um zu Warnen. Wenn du die Warnung geprüft hast und dir sicher bist, das das so in Ordnung geht, dann sorge dafür, dass die Warnung verschwindet, damit erstens niemand davon unnötig irritiert wird und zweitens neue Warnungen im Zuge von Codeänderungen oder -erweiterungen nicht in der Flut alter (bereits als unberechtigt verifizierter) Warnungen untergehen. So geht Software-Entwicklung. Auch (und gerade) in Assembler. Da gibt es nämlich weiss Gott genug Fallstricke und wenig Möglichkeiten für den Assembler, dem Programmierer zu helfen. Da nutzt man dann wenigstens konsequent die, die es gibt. Das Zauberwort in diesem Fall heisst: .undef
c-hater schrieb: > Auch (und gerade) in Assembler. Dem echt harten Hund sind Warnungen schnuppe. .undef ist was für Weicheier ;-)
c-hater schrieb: > Das Zauberwort in diesem Fall heisst: .undef > Das nenne ich doch mal sinnvolle Kritik. Gefällt mir jetzt auch besser wenn keine Warnungen da sind. > > Warum nutzt du sinnvolle Konzepte nicht, wenn du sie schon kennst? > Würd mich ja interessieren, ob dies wirklich sinnvoller ist und mit meiner Breadboardschaltung testen, aber es gibt ja kein fertiges AVR8ASM-Programm und erst recht nicht für den ATmega88. Übrigens es ist von Vorteil an der L298N-Platine, bei der ich beide Ausgänge und Signaleingänge parallel verschaltet habe, den EN-Eingang mit einem Pulldown-Widerstand zu versehen, da es beim Einschalten der Versorgungsspannung sonst für einen Augenblick zu einem ungewolltem Drehen des Motors kommen kann. Ich habe auch die IB_2-Platine mit dem BTS7960, dort wäre es von Vorteil den High-Side-Zweig beim Bremsen zu nutzen da dieser besser leitet, aber Programmtechnisch ist dies aufwändiger. Beitrag "Re: Motorsteuerung mit L298N und Attiny" Beitrag "BTS7960B_IBT_2 Chinaplatine" Bernd_Stein
Bernd S. schrieb: > Würd mich ja interessieren, ob dies wirklich sinnvoller ist Ist es natürlich, das sagen schon die Gesetze der Logik. Wenn eine Hardware einen systemimmanenten Mechanismus anbietet, um mögliche Fehler zu unterdrücken, dann nutzt man den natürlich. > und mit > meiner Breadboardschaltung testen, aber es gibt ja kein fertiges > AVR8ASM-Programm und erst recht nicht für den ATmega88. So what? Du bist Programmierer. Übrigens muss man den Mechanismus nicht sklavisch so abbilden, wie in der Vorlage. Für einen einzelnen schnellen Encoder wäre das suboptimal. Die Vorlage nutzt den Mechanismus effizent für mehrere, relativ langsame Encoder. Der Kern ist also, den Mechanismus zu verstehen. Die Implementierung kann dann ganz erheblich von der Vorlage abweichen. Sogar so sehr, das das gemeinsame Konzept kaum noch erkennbar ist.
c-hater schrieb: > So what? Du bist Programmierer. > Nein - vielleicht du. Ich merke schon, jetzt wird wieder nur rumgequatscht aber nicht konkret daraufhin gearbeitet eine AVR8-Assemblerversion aus dem µC-Artikel zum Drehgeber zu erstellen, damit ich beide Versionen mal austesten kann. In meinen Theorien klappen die Mechanismen auch immer wunderbar. Wenn ihr also nur rumquatschen wollt, dann mach ich dabei nicht mehr mit. Bernd_Stein
Angehängte Dateien:
-

01-KeyMgr.png
62 KB -

02-KeyMgr.png
210 KB -

03-KeyMgr.png
150 KB -

04-KeyMgr.png
240 KB
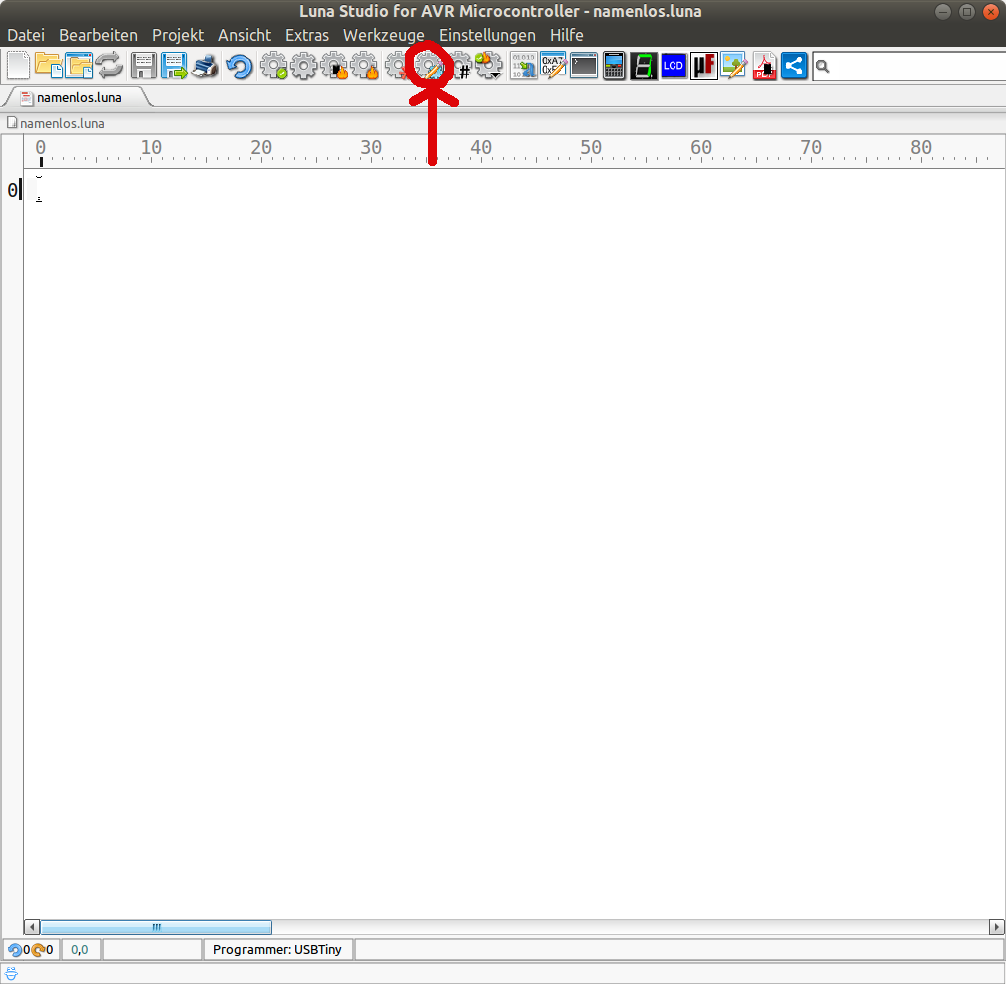
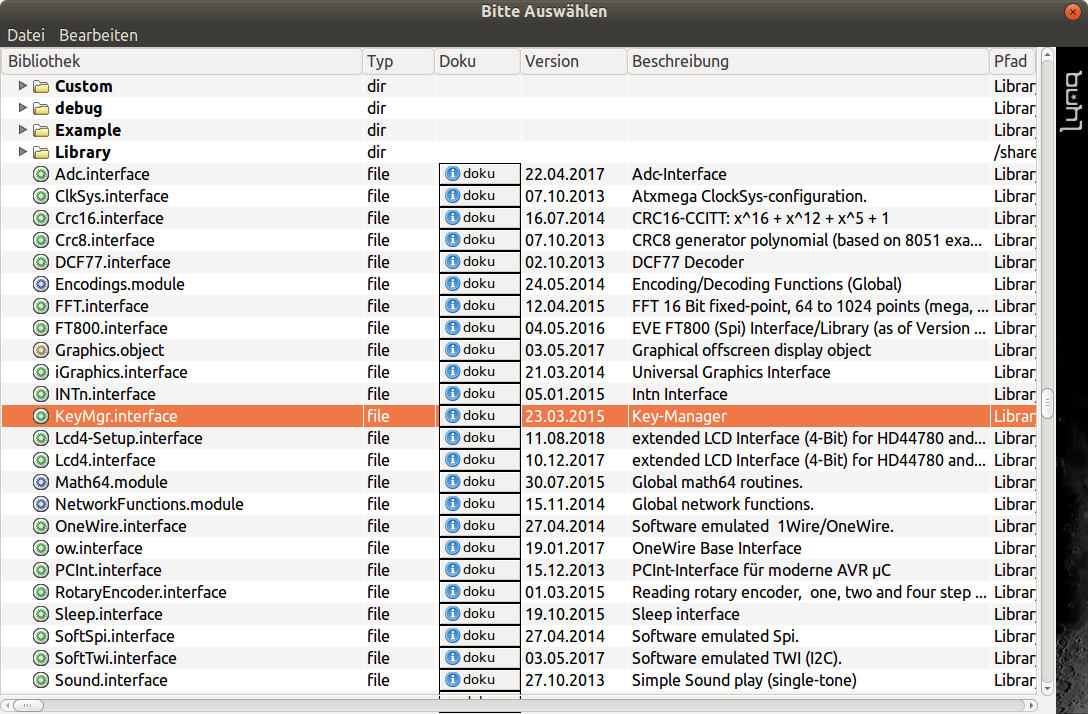
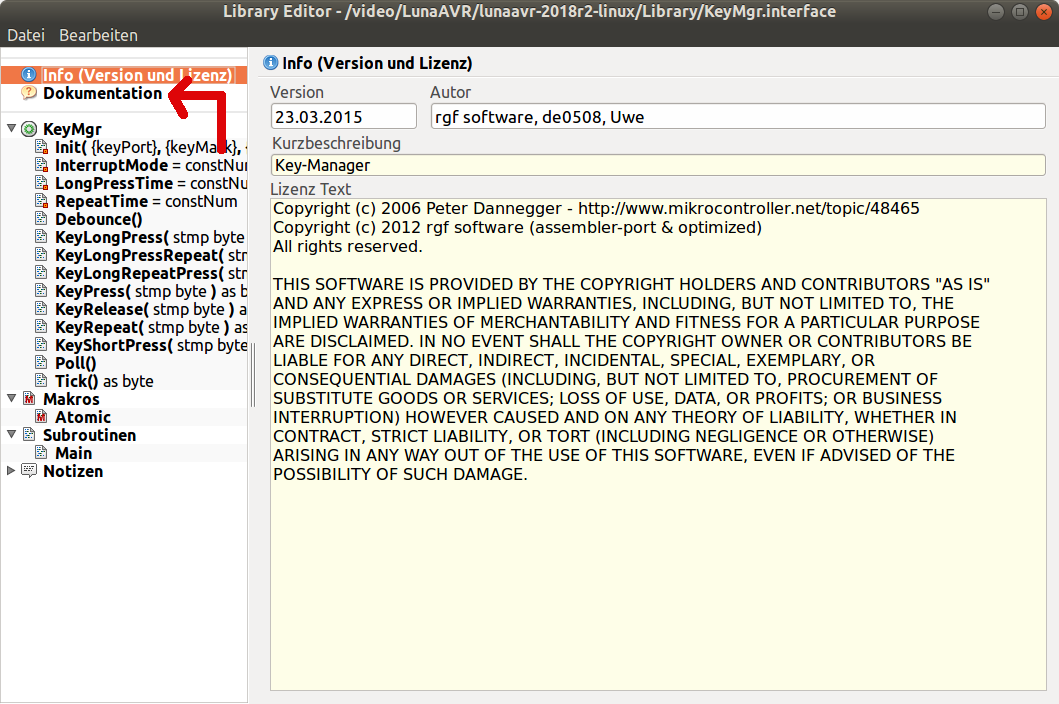
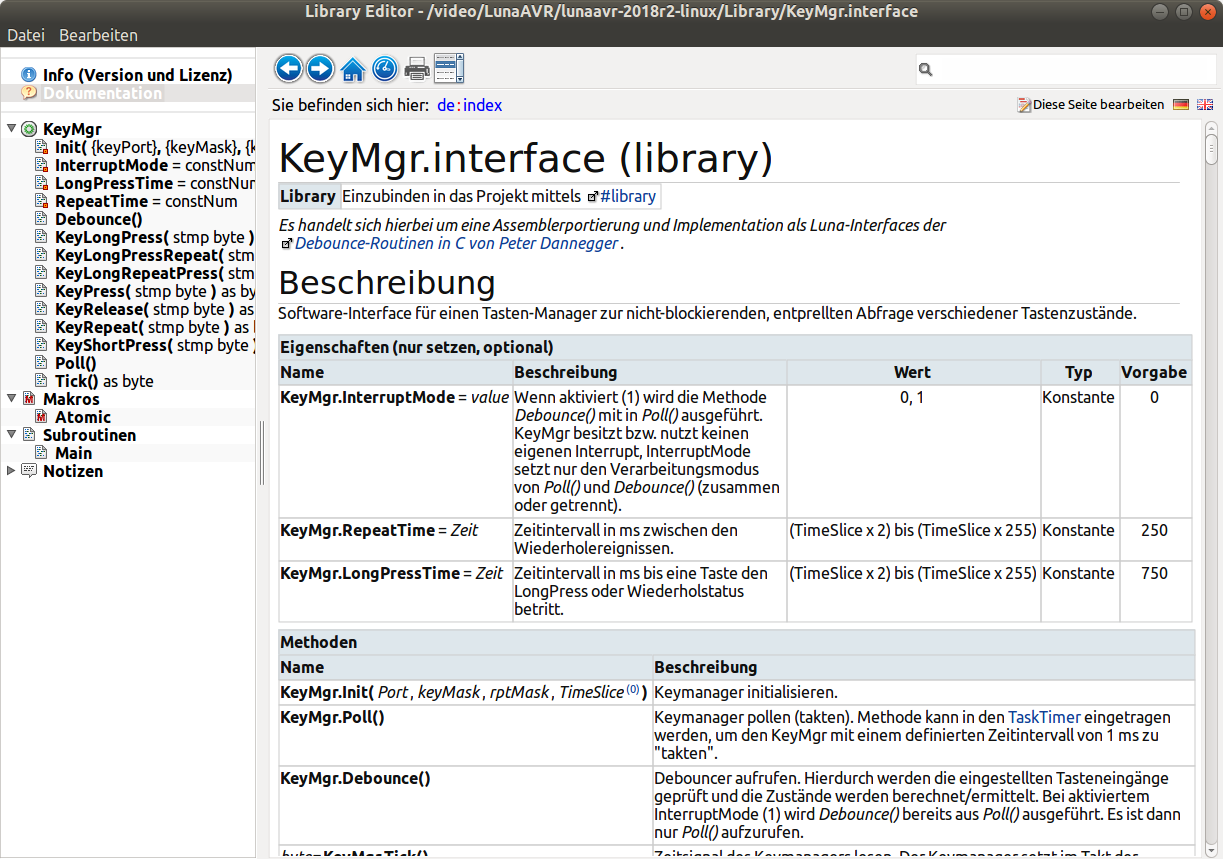
Hallo Bernd S., für LunaAVR verwenden wir schon seit Anfang an, nur eine Assembler Version. Da das interne FrameWork auf Assembler implementierte Bibliotheken (Interface und Module) basiert. https://avr.myluna.de/doku.php?id=de:download Wenn es Dich interessiert, schau mal in das Interface "KeyMgr", eine kurze Beschreibung steht im Interface auch direkt drin. Anbei einige Bilder dort hin. Hier ist ein Beispielcode, man kann sich auch die erzeugte Assemblerausgabe in der *.s Datei ansehen.
1 | '--------------------------------------- |
2 | ' KeyManager Samble Code |
3 | ' 2019-08-06 |
4 | '--------------------------------------- |
5 | |
6 | '--------------------------------------- |
7 | ' System Settings |
8 | '--------------------------------------- |
9 | const F_CPU = 8000000 |
10 | avr.device = atmega328p |
11 | avr.clock = avr.F_CPU |
12 | avr.stack = 42 |
13 | |
14 | '--------------------------------------- |
15 | ' Macros |
16 | '--------------------------------------- |
17 | #define BV(n) as (1<<(n)) |
18 | #define NBV(n) as (not BV(n)) |
19 | |
20 | #macro BEGIN_ATOMIC |
21 | asm |
22 | xIn _TMP0,SREG |
23 | cli |
24 | endasm |
25 | #endmacro |
26 | |
27 | #macro END_ATOMIC |
28 | asm |
29 | xOut SREG,_TMP0 |
30 | endasm |
31 | #endmacro |
32 | |
33 | '--------------------------------------- |
34 | ' Library |
35 | '--------------------------------------- |
36 | #library "Library/KeyMgr.interface" |
37 | #library "Library/Wdt.interface" |
38 | |
39 | part I/O Ports |
40 | // Tasten |
41 | #define SW1 as PORTB.0 |
42 | #define SW2 as PORTB.1 |
43 | #define KEY_PORT as PORTB |
44 | |
45 | const SW1_BIT = 0 |
46 | const SW1_MASK = BV(SW1_BIT) |
47 | const SW2_BIT = 1 |
48 | const SW2_MASK = BV(SW2_BIT) |
49 | endpart |
50 | |
51 | '--------------------------------------- |
52 | ' Init |
53 | '--------------------------------------- |
54 | part I/O Ports |
55 | // Tasten |
56 | // nur der Vollständigkeit halber. |
57 | SW1.mode = input, pullup |
58 | SW2.mode = input, pullup |
59 | endpart |
60 | |
61 | part KeyManager |
62 | const KEYMGR_CYCLE_TIME = 16 ' ms, see WDT settings |
63 | |
64 | const KEYMGR_MASK = (SW1_MASK or SW2_MASK) |
65 | const KEYMGR_REPEAT_MASK = 0 ' no key with repeat function |
66 | |
67 | KeyMgr.RepeatTime = word(300/ KEYMGR_CYCLE_TIME +.5) |
68 | KeyMgr.LongPressTime = word(800/ KEYMGR_CYCLE_TIME +.5) |
69 | KeyMgr.InterruptMode = 1 |
70 | KeyMgr.Init(KEY_PORT, KEYMGR_MASK, KEYMGR_REPEAT_MASK, 0) ' run on timer interrupt |
71 | |
72 | WDT_Init() |
73 | endpart |
74 | |
75 | avr.Interrupts.Enable() |
76 | |
77 | do |
78 | |
79 | // Taster gedrückt |
80 | if KeyMgr.KeyPress(SW1_MASK) then |
81 | ' ... |
82 | endif |
83 | |
84 | if KeyMgr.KeyPress(SW2_MASK) then |
85 | ' ... |
86 | endif |
87 | |
88 | // Taster losgelassen |
89 | if KeyMgr.KeyRelease(SW1_MASK) then |
90 | ' nur ein Beispiel |
91 | endif |
92 | |
93 | if KeyMgr.KeyRelease(SW2_MASK) then |
94 | ' nur ein Beispiel |
95 | endif |
96 | |
97 | |
98 | loop |
99 | |
100 | ' Main Sub-Functions |
101 | |
102 | procedure WDT_Init() |
103 | WDT.isr = WDT_vect |
104 | WDT.Clock = 16ms |
105 | WDT.mode = Interrupt |
106 | endproc |
107 | |
108 | isr WDT_vect fastauto |
109 | avr.KeyMgr.Debounce() ' <-- call KeyManager Debounce |
110 | endisr |
Karl M. schrieb: > Wenn es Dich interessiert, schau mal in das Interface "KeyMgr", eine > kurze Beschreibung steht im Interface auch direkt drin. Das ist völlig ungeeignet, denn es nutzt gerade nicht die Besonderheit von Rotationsencodern. Das ist für Taster. Sagt ja auch schon allein der Name... Kann mann allenfalls für den "Drücker" eines handbetätigten Encoders nutzen.
c-hater schrieb: > Karl M. schrieb: > >> Wenn es Dich interessiert, schau mal in das Interface "KeyMgr", eine >> kurze Beschreibung steht im Interface auch direkt drin. > > Das ist völlig ungeeignet, denn es nutzt gerade nicht die Besonderheit > von Rotationsencodern. Das ist für Taster. Sagt ja auch schon allein der > Name... > > Kann mann allenfalls für den "Drücker" eines handbetätigten Encoders > nutzen. Danke, korrekt, da habe ich mich vertan. Für Drehencoder findet man auch das entsprechende RotaryEncoder.interface im Datenbestand. Einen 4-fach Version gibt es auch noch auf meiner Festplatte.
Weil ich doch so gerne mit dem ATmega88PA arbeite und meine Englischkenntnisse miserabel sind : https://www-user.tu-chemnitz.de/~heha/viewchm.php/hs/ATmegaX8.chm/ Beitrag "Datenblatt (ATmega48, ATmega88, ATmega168, ATmega328) auf deutsch" Bernd_Stein
Angehängte Dateien:
-

PID_ATtiny13A_DSO_Komplett.png
12 KB -

PID_ATtiny13A_DSO_Mitte.png
10 KB -

PID_ATtiny13A_Screen.jpg
230 KB -

PID_ATtiny13A.jpg
450 KB
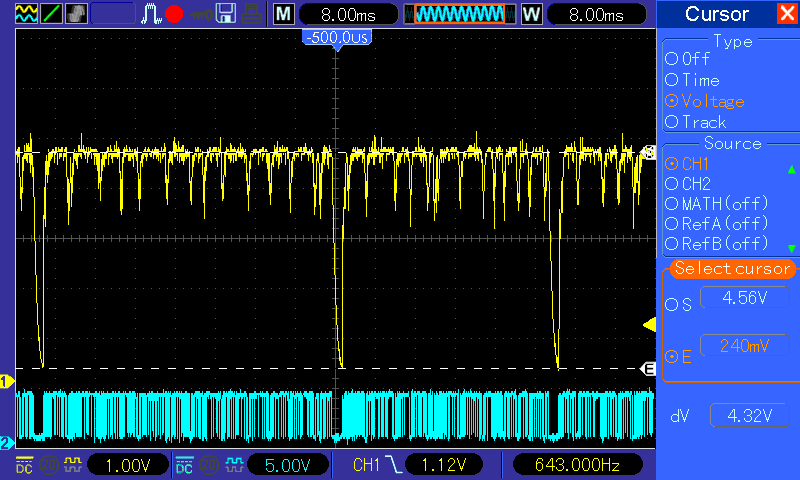
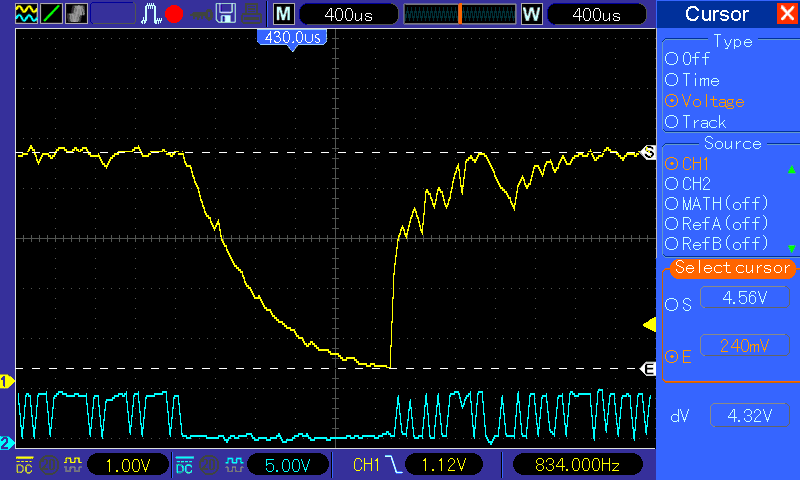

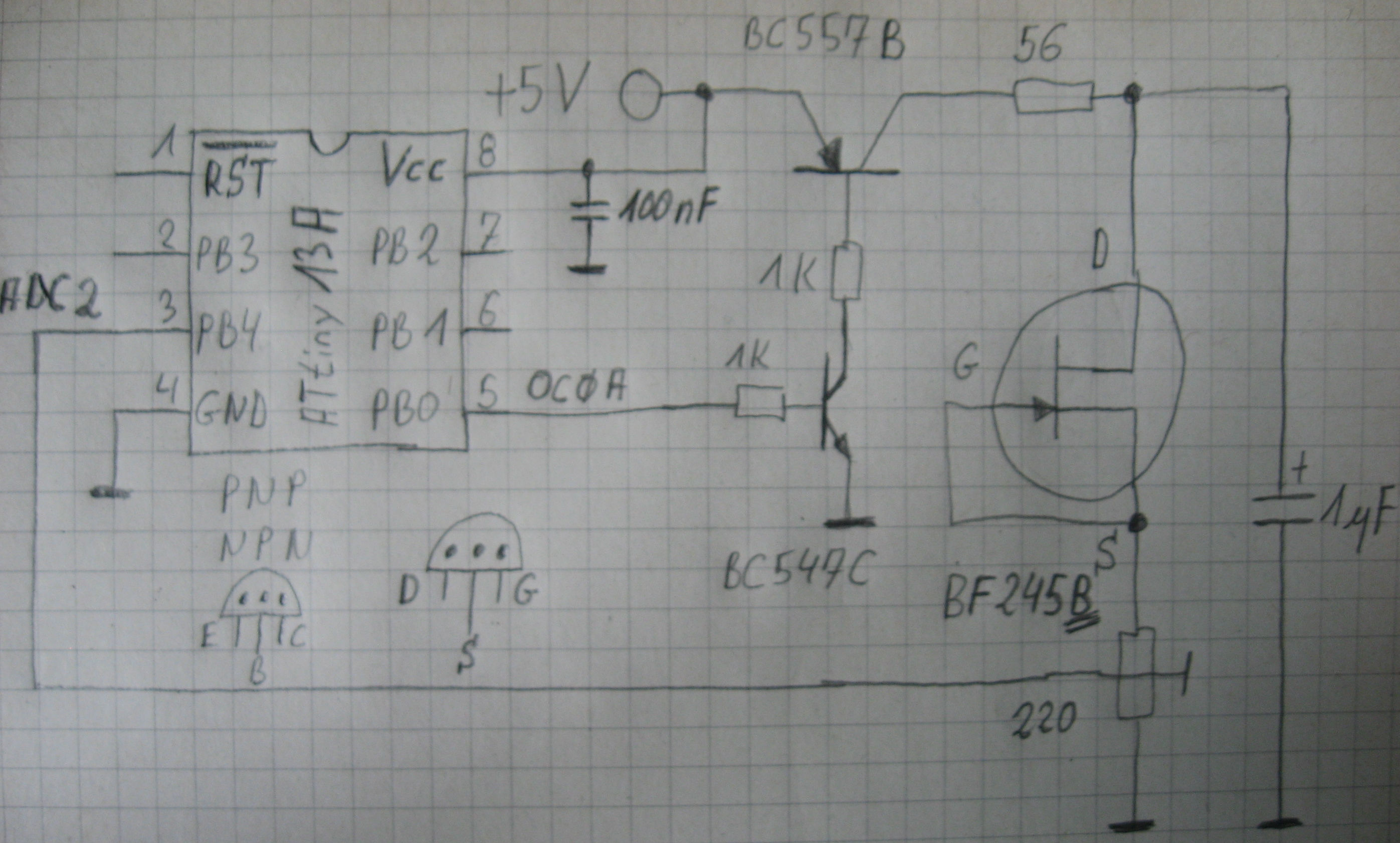
Da es sehr wenige Open Source Projekte gibt, die eine PID-Regelung in AVR-Assembler vorstellen, habe ich versucht, dass Wenige, das es hierzu gibt mal zu analysieren, um zu verstehen wie so etwas funktioniert. Die für mich beste Quelle ist : https://www.loetstelle.net/projekte/tiny13pid/tiny13pid.html Ich habe die Sache so abgewandelt, dass ein 1µF Kondensator anstelle der Akkus benutzt wird ( siehe Schaltplan ). Wichtig ist dass der BF245 wirklich ein B-Typ ist. Da der BF245 nicht mehr Produziert wird, weiß ich nicht, ob mit den Alternativen J111, J112, J113 und PN4393 dass selbe Resultat erreicht wird. https://www.elektronik-kompendium.de/public/schaerer/anasw1.htm In der Firmware habe ich die mit dem Breakpoint markierten Stellen eingefügt, damit bei einem Sollwert von Null, der sonst übliche Spike ausbleibt. Der 220 Ohm Widerstandstrimmer ist auf 0,992xV eingestellt ( ADC2 ). CH1 ( Gelb ) zeigt die Spannung am Kondensator. CH2 ( Cyan ) zeigt die Spannung an PB0 bzw. dem OC0A-Ausgang ( Fast PWM Mode ). Ich verstehe nicht, warum es kein nachregeln gibt, obwohl die Kondensatorspannung sinkt. Erst bei ca. 240mV wird wieder geregelt. Der nachfolgende Link ist mir zu kompliziert : Beitrag "PID-Regler für Atmega8" Bernd_Stein
Bernd S. schrieb: > https://www.loetstelle.net/projekte/tiny13pid/tiny13pid.html Das ist ziemlicher Mist. Alle drei Koeffizienten sind fix und gleich 8. Außerdem kein Schutz gegen WindUp für den Integralteil. Unbrauchbar, jedenfalls für den allgemeinen Einsatz. Und es würde mich sehr wundern, wenn es für die konkrete Anwendung eine auch nur zufriedenstellende Lösung wäre. Das wäre reiner Zufall. Bei genauerer Betrachtung (hab' ich jetzt keine Lust zu) wird es wohl darauf hinauslaufen, dass da in Wirklichkeit ein leicht "wackliger" Zweipunktregler läuft. Sowas kann man allerdings viel einfacher programmieren... > Der nachfolgende Link ist mir zu kompliziert : > > Beitrag "PID-Regler für Atmega8" Ist aber vom Ansatz her trotzdem weit besser als der Mist von oben. Es gibt immerhin konfigurierbare Koeffizienten. Anti-Windup allerdings ebenfalls nicht. Und: die Implementierung ist schlicht fehlerhaft. Die Fehler haben mit dem Algorithmus selber überhaupt nix zu tun, das sind einfach nur Flüchtigkeitsfehler. Die passieren auch Profis. Die sind dann allerdings in der Lage, die Fehler selbstständig zu finden und zu fixen... Nach >10 Jahren Asm-Programmierung solltest du allerdings definitiv so weit sein, auch wenn du das nicht beruflich machst...
c-hater schrieb: > Bernd S. schrieb: > >> https://www.loetstelle.net/projekte/tiny13pid/tiny13pid.html > > Das ist ziemlicher Mist. Alle drei Koeffizienten sind fix und gleich 8. > Außerdem kein Schutz gegen WindUp für den Integralteil. > Zumindest mal ein Ansatz wo gezeigt wird, wie so etwas in AVR8ASM umzusetzen ist, ohne gleich hoch kompliziert zu sein und dennoch eine "funktionierende" Anwendung. Das Programm zum ASURO ist ja auch nie fertig gestellt worden. Zumindest nicht vom Thread-Eröffner. Wie überhaupt 99% der Threads hier nur Datenleichen sind, wo kein Projekt abgeschlossen wurde und mit dessen Informationen man sich die Zeit vertreiben kann, wie auch jetzt wieder mit deinem Posting. Da ist die oben verlinkte Seite schonmal 100 mal mehr Wert als alles was ich hier zu PID-Reglern in AVR8ASM gelesen habe. c-hater schrieb: > Bei genauerer Betrachtung (hab' ich jetzt keine Lust zu) wird es wohl > darauf hinauslaufen, dass da in Wirklichkeit ein leicht "wackliger" > Zweipunktregler läuft. Sowas kann man allerdings viel einfacher > programmieren... > Da sich die PWM-Pulsbreite verändert ( siehe DSO-Screenshots ), denke ich nicht dass es sich im weitesten Sinne um einen Zweipunktregler handeln kann. Bernd_Stein
Bernd S. schrieb: > Zumindest mal ein Ansatz wo gezeigt wird, wie so etwas in AVR8ASM > umzusetzen ist, ohne gleich hoch kompliziert zu sein Der Lösungsansatz aus deinem zweiten Link ist auch nicht "hochkompliziert". Er stellt vielmehr das absolute Minimum für einen einigermaßen tauglichen PID-Regler dar. Wenn dir das schon zu kompliziert ist, ist Assembler einfach nicht die richtige Sprache für dich. Dann musst du auf Sprachen zurückgreifen, die die zwingend nötige (wenn auch recht triviale) Mathematik auf höherer Ebene abstrahieren. Trivial ist übrigens nur die Implementierung des Reglers. Die Modellierung hingegen ist es nicht. Das gilt vollkommen unabhängig von der zur Implementierung verwendeten Sprache. > Da sich die PWM-Pulsbreite verändert ( siehe DSO-Screenshots ), denke > ich nicht dass es sich im weitesten Sinne um einen Zweipunktregler > handeln kann. Was zeigt, dass du auch keine Ahnung von der Interpretation von Messergebnissen hast. Ich sehe da genau zwei vorkommende Werte für die PWM-Pulsbreite. Das ist aber nun ziemlich genau das, was man von einem Zweipunktregler erwarten könnte... > wo kein Projekt abgeschlossen wurde und mit > dessen Informationen man sich die Zeit vertreiben kann, wie auch jetzt > wieder mit deinem Posting. Heul doch. Willst du programmieren oder Copy&Paste betreiben? Falls letzteres: lass' ab von Assembler (das überfordert dich offensichtlich massiv) und mach einen auf Arduino. Das machen die anderen Arduidioten auch und kriegen damit wenigstens das eine oder andere tatsächlich gebacken. Natürlich immer fernab des Optimums, aber es läuft halt wenigstens. Irgendwie... Der Arduino-Code hat in etwa dieselbe Qualität wie deine präferierte Lösung eines PID-Reglers. Es scheint irgendwie zu funktionieren, allerdings aus "unklaren Gründen" nicht wirklich gut...
c-hater schrieb: > Was zeigt, dass du auch keine Ahnung von der Interpretation von > Messergebnissen hast. Ich sehe da genau zwei vorkommende Werte für die > PWM-Pulsbreite. Das ist aber nun ziemlich genau das, was man von einem > Zweipunktregler erwarten könnte... > Tja, dafür hab ich ja die Screenshots hochgeladen, damit jeder diese interpretieren kann und wenn du da _nur_ zwei verschiedene Pulsweiten siehst, dann ist das so für dich. Der Screenshot bleibt ja glücklicherweise davon unberührt und jeder kann sich zu unseren Äußerungen hierzu sein eigenes Bild machen. In diesem Sinne danke für deine Sichtweise, aber auch hier kommen wir zwei auf keinen gemeinsamen Nenner. Bernd_Stein
Bernd S. schrieb: > Weil ich doch so gerne mit dem ATmega88PA arbeite und meine > Englischkenntnisse miserabel sind : > > https://www-user.tu-chemnitz.de/~heha/viewchm.php/hs/ATmegaX8.chm/ > > Beitrag "Datenblatt (ATmega48, ATmega88, ATmega168, ATmega328) auf > deutsch" > Was muss ich tun um das Ganze auch Offline nutzen zu können? Mit dem einfachen herunterladen wie Thread geschrieben geht es nicht ! Es wäre sehr, sehr schade, wenn die Seite mal nicht mehr existiert und man diese wirklich hervorragende Arbeit nicht mehr nutzen kann. Bernd_Stein
Hier mal eine ganz simple Auswertung eines Drehencoders : https://www.youtube.com/watch?v=bBhbynj6NYM Bernd_Stein
Bernd S. schrieb: > Hier mal eine ganz simple Auswertung eines Drehencoders : > https://www.youtube.com/watch?v=bBhbynj6NYM Aua Autsch: Entprellen mit zwei 10nF Kondensatoren und Auswertung per Interrupt-Eingang. Man hat dir doch erst kürzlich erklärt dass das Unsinn ist. Ich mag es jetzt nicht raussuchen.
Hallo Bernd, mach das einfach so, wie es für deine Anwendung optimal ist. Es gibt viele Möglichkeiten der Entprellung und Auswertung und kein „Das macht man so und nicht anders“. Alle haben Vor- und Nachteile. Das über Interrupt’s zu machen ist sicher eine gute Option. Gruß Carsten
Carsten-Peter C. schrieb: > Das > über Interrupt’s zu machen ist sicher eine gute Option. > Demnächst will ich einen Motor-Encoder testen, da ist per Interrupt Pflicht. Bernd_Stein
Carsten-Peter C. schrieb: > Hallo Bernd, mach das einfach so, wie es für deine Anwendung optimal > ist. Ist es aber nicht. > Es gibt viele Möglichkeiten der Entprellung und Auswertung und kein > „Das macht man so und nicht anders“. Doch, das gibt es. Ein "alles ist richtig" ist einfach nur Unfug. > Alle haben Vor- und Nachteile. Das > über Interrupt’s zu machen ist sicher eine gute Option. Nur, wenn es ein Timer-Interrupt ist und nicht ein flankengesteuerter! Das wurde schon tausendfach diskutiert und auch NACHGEWIESEN! Aber daß unser Bernd immer alles "etwas anders" machen muss, ist weitläufig bekannt. Ebenso wie seine Lernresistenz.
https://www.youtube.com/watch?v=bBhbynj6NYM#t=6m30s Quark. Mal angesehen davon, daß 100k Pull-Ups bissel viel sind, darf beim Wechsel von B der Kanal A NICHTS machen! Auch kein Übersprechen! Wenn doch, ist der Drehgeber im Eimer! Und da tut man auch nicht warten! Sondern mittels Timer-Interrupt in gleichmäßigen Abständen abtasten. Siehe Drehgeber. Tausendfach diskutiert, tausendfach bewiesen. Trotzdem kommen immer wieder Schlaumeier, die das Rad eckig erfinden wollen. Viel Spaß dabei! https://www.youtube.com/watch?v=bBhbynj6NYM#t=8m Jaja, einfach 10nF gegen den Schaltkontakt. OMG! NEIN! Da gehört ein Längswiderstand rein, dann ist es nämlich auch ein RICHTIGER RC-Tiefpass der in BEIDE Richtungen wirkt (steigende und fallende Flanke) und der Kontakt wird nicht gebrutzelt! https://www.mikrocontroller.net/articles/Entprellung#Einfacher_Taster So und nicht anders!
Moin, ich bastel gerade an einer Motorsteuerung mit einen ATMega 1284P. Ich möchte ein Poti nutzen und ev. zusätzlich einen Drehgeber. Es ist kein freier Timer vorhanden. Eine zyklische Abfrage über einen Timer per ISR würde eine ständige Unterbrechung und somit in der Zeit keine weiteren Interupts erlauben. Sowas kann ich wirklich nicht gebrauchen. Eine Abfrage im Hauptprogramm geht nicht, weil die einzelnen Durchläufe zeitlich sehr unterschiedlich sein können. Da ich eigentlich nur den Port A nutzen kann, kommt nur ein PCINT in Frage. Ich würde zunächst nur Signal A über das Register PCMSK0 selektieren und auf eine Änderung warten. In der ISR würde ich dann den Pin sperren und auf den Pin vom Signal B schalten. Das sollte sehr schnell gehen und keine Entprellung brauchen, solange nicht zwei Pegelwechsel gleichzeitig wechseln. Soweit zum Standardprogramm. Gruß Carsten
Carsten-Peter C. schrieb: > Moin, > ich bastel gerade an einer Motorsteuerung mit einen ATMega 1284P. Ich > möchte ein Poti nutzen und ev. zusätzlich einen Drehgeber. Es ist kein > freier Timer vorhanden. Wollen wir wetten, daß das nicht stimmt? Das bissel Abfrage des Drehgebers kann man LOCKER in andere Timer einbauen. > Eine zyklische Abfrage über einen Timer per ISR > würde eine ständige Unterbrechung und somit in der Zeit keine weiteren > Interupts erlauben. Unsinn! > Sowas kann ich wirklich nicht gebrauchen. Du hast das Thema Interrupt nicht verstanden. > brauchen, solange nicht zwei Pegelwechsel gleichzeitig wechseln. Soweit > zum Standardprogramm. Unfug^3. Aber mach mal.
Falk B. schrieb: > Wollen wir wetten, daß das nicht stimmt? Das bissel Abfrage des > Drehgebers kann man LOCKER in andere Timer einbauen. Solange du nicht die Drehgeschwindigkeit des Teils messen willst, sondern nur den Winkel, kannst du mit ein paar 10ms Zykluszeit pollen. Und das muss auch nicht zwingend äquidistant sein. Das wir deine Mainloop doch noch hergeben, oder?
Falk B. schrieb: > Wollen wir wetten, daß das nicht stimmt? Das bissel Abfrage des > Drehgebers kann man LOCKER in andere Timer einbauen. Moin, also es handelt sich u. A. um eine Ansteuerung eines BergerLahr 5-Phasen Schrittmotors. Der braucht 5 PWM Signale in meiner Schaltung. Dafür nutze OCR0A+B, OCR2A+B und OCR3A sowie den Timer 1 für die Geschwindigkeit des Motors. Damit sind alle Timer genutzt. Der Motor arbeitet im Halbschrittbetrieb, wobei jeder Halbschritt in bis zu 255 Mikroschritte unterteilt wird. Es werden 4 der 5 Wicklungen mit jeweils bis zu 2,7A bei bis zu 80 V gespeist. Das Programm ist in Assembler geschrieben. Das funktioniert auch soweit recht gut. Ein periodischer Int für den Drehgeber würde die Laufruhe negativ beeinflussen. Mit dem Poti (und Drehgeber) sowie über die serielle Schnittstelle kann man die Geschwindigkeit oder die Position des Motors einstellen. Manchmal wird in der Mainloop die genaue Position oder der Winkel berechnet. 4 Byte von Hex nach Dez oder umgekehrt zu berechnen und auszugeben dauert eben. Eigentlich ist es mir egal, ob Du das glaubst, oder eben nicht. Gruß Carsten
Carsten-Peter C. schrieb: > Moin, > also es handelt sich u. A. um eine Ansteuerung eines BergerLahr 5-Phasen > Schrittmotors. Der braucht 5 PWM Signale in meiner Schaltung. Dafür > nutze OCR0A+B, OCR2A+B und OCR3A sowie den Timer 1 für die > Geschwindigkeit des Motors. Damit sind alle Timer genutzt. Ja und? Was schrieb ich denn wohl? > Der Motor > arbeitet im Halbschrittbetrieb, wobei jeder Halbschritt in bis zu 255 > Mikroschritte unterteilt wird. Es werden 4 der 5 Wicklungen mit jeweils > bis zu 2,7A bei bis zu 80 V gespeist. Das Programm ist in Assembler > geschrieben. Das funktioniert auch soweit recht gut. Ein periodischer > Int für den Drehgeber würde die Laufruhe negativ beeinflussen. ;-) Nur wenn man's nicht kann! > Mit dem > Poti (und Drehgeber) sowie über die serielle Schnittstelle kann man die > Geschwindigkeit oder die Position des Motors einstellen. Manchmal wird > in der Mainloop die genaue Position oder der Winkel berechnet. 4 Byte > von Hex nach Dez oder umgekehrt zu berechnen und auszugeben dauert eben. Und ist vollkommen egal, wenn man weiß was man tut und die zeitkritischen Ding in der richtigen Art und Weise im Interrupt erledigt und den Rest passen puffert. > Eigentlich ist es mir egal, ob Du das glaubst, oder eben nicht. Umso besser! Du wärst aber nicht der Erste, der meint, eine Herkulesaufgabe zu bewältigen nur um dann festzustellen, daß das Konzept bestenfalls funktioniert, aber nicht gut ist und daß man es DEUTLICH besser machen kann. Das wurde in diesem Forum schon recht oft nachgewiesen. Kostprobe gefällig? Der Zweifler Beitrag "Re: Arduino Nano, SD Card, PCM" Der Beweis Beitrag "Re: Arduino Nano, SD Card, PCM"
Carsten-Peter C. schrieb: > ich bastel gerade an einer Motorsteuerung mit einen ATMega 1284P. Ich > möchte ein Poti nutzen und ev. zusätzlich einen Drehgeber. Es ist kein > freier Timer vorhanden. Warum nimmst du dann keinen AtXmega128A3. Der hat massenhaft Timer, Drehgeber-Eingänge in Hardware, doppelte Geschwindigkeit, etc.
Thomas F. schrieb: > Warum nimmst du dann keinen AtXmega128A3. Der hat massenhaft Timer, > Drehgeber-Eingänge in Hardware, doppelte Geschwindigkeit, etc. Moin, 1. Den hatte ich noch liegen. 2. Der hat ein bastelfreundliches Gehäuse, das ich direkt zum Testen in mein altes Pollin EV-Board stecken kann. 3. Der hat genügend Timer und ausreichend SRAM für den seriellen Puffer. 4. Programmteile kann ich einfach von einem anderen Projekt übernehmen (Beitrag "Re: Zeigt her eure Kunstwerke (2021)"). 5. Den kenne ich, weil ich damit einiges gemacht habe. Warum ich für den Drehgeber keinen Timer möchte, habe ich bereits versucht zu erklären. Die Auswertung des Drehgebers sollte eigentlich kein Problem sein und so nebenbei laufen. Gruß Carsten
Carsten-Peter C. schrieb: > 5. Den kenne ich, weil ich damit einiges gemacht habe. > Warum ich für den Drehgeber keinen Timer möchte, habe ich bereits > versucht zu erklären. Die Auswertung des Drehgebers sollte eigentlich > kein Problem sein und so nebenbei laufen. Das tut sie auch, wenn man weiß wie es geht. Aber du bist ja, ähhh, anders . . .
Carsten-Peter C. schrieb: > Warum ich für den Drehgeber keinen Timer möchte, habe ich bereits > versucht zu erklären. Hast Du den Kommentar zum sampling des encoders gelesen?
Bernd S. schrieb: > Hier mal eine ganz simple Auswertung eines Drehencoders : Dreck, 11 Minuten mit durchaus schöner Darstellung wie Drehgeber prellen und dann eine Interruptauswertung. Bernd S. schrieb: > Demnächst will ich einen Motor-Encoder testen, da ist per Interrupt > Pflicht. Was genau hast du nicht verstanden. Alles ? Ja, man kann Drehgeber auch mit Interrupts auswerten wenn man ein paar Millisekunden (Prellzeit) nach dem Interrupt sampelt. Aber man muss dabei Interrupts sperren und wieder freigeben, sonst kann man von hunderten Prellimpulsen überrannt werden, das erfordert einige sonst überflüssige zusätzliche Programmzeilen, und man wird damit weder Impulse durch vibrierende Drehachsen noch Störungen durch mangelnden Kontakt der Schleifer auf der Kontaktbahn los. Sprich: es funktioniert nicht, nur in der Theorie unter unvollständig simulierter Realität, in der Praxis bekommt man Fehlzählungen. Lediglich des zyklische Pollen verzählt sich auch in der üblen Realität nicht. Aber wer, der sein Wissen auf Teletubbiniveau erwirbt, will das schon wissen. https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.29
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.