Hallo alle, mein Name ist Wolfgang und ich wollte in meiner Freizeit an einem Privaten Projekt Arbeiten. Ich habe mir in meinem Garten eine kleine Windmühle aufgestellt, von der würde ich gerne die Geschwindigkeit messen. Ich habe mir schon einen Sensor geholt und denn an meinem FPGA angeschlossen. Ich bin schon so weit gekommen, das er mir, wenn der Sensor denn Magneten entdeckt, mir auf den 7-Seg Display eine 1 anzeigt. Nun komme ich nicht weiter, ich weiss das ein Aduiono oder andere Boards einfacher wären, aber ich möchte meine Kenntnisse in VHDL/FPGA verbessern. Hat jemand schon mal ein ähnliches Projekt gemacht oder hätte jemand Quellen für mich?
Schreib dir noch einen Zaehler fuer deinen Sensor und eine Uhr mit 7 Segmentanzeige. Dann brauchst du nur noch die Differenz des Zaehlers zwischen den Sekunden zu bilden, mit 60 zu multiplizieren und hast "Rotations per Minute"!
Wolfgang schrieb: > von der würde ich gerne die Geschwindigkeit messen. In welcher Einheit? Flügelspitzengeschwindigkeit in m/s? Oder einfach nur U/min? > Ich bin schon so weit gekommen, das er mir, wenn der Sensor denn > Magneten entdeckt, mir auf den 7-Seg Display eine 1 anzeigt. Dann solltest du dich noch zum Thema "Eintakten" bzw. "Einsynchronisieren" schlau machen, denn sonst wird dein Messwert dann und wann "spinnen". Cartman schrieb: > Dann brauchst du nur noch die Differenz des Zaehlers > zwischen den Sekunden zu bilden Das ist natürlich nur sinnvoll, wenn innerhalb 1s genug Impulse anfallen. > mit 60 zu multiplizieren und hast "Rotations per Minute"! Einfacher wäre es, pro Impuls 60 auf einen Zähler draufzuaddieren. Aber weil ein FPGA verglichen mit der Aufgabe dermaßen schnell ist, würde ich die Zeit zwischen 2 Impulsen ermitteln (also us/U), dann den Kehrwert bilden und mit 60000000 multiplizieren und hätte dann U/min. Diese Rechungen könnte man in einer Tabelle abbilden und mit Interpolation die Zwischenwerte ermitteln. Nette Fingerübung zum selber Lernen.
> den Kehrwert bilden ist fuer ein FPGA immer Schwerstarbeit. Und nicht unbedingt Anfaengertauglich. Damit verkomplizierst du ihm den Einstieg voellig unnoetig. > genug Impulse anfallen Er kann ja Anzahl der Hallsensoren ja vergroessern :-). Oder ein paar Ausloesemagnete dazutun. Ein "genauen" Wert wie 55.5 rpm ist sowieso nur bedingt aussagekraeftig. Wind ist keine Konstante. Nicht mal innerhalb einer Umdrehung.
Cartman schrieb: > den Kehrwert bilden ist fuer ein FPGA immer Schwerstarbeit. Die Anzeige muss ja nicht 1 Mio mal pro Sekunde aktualisiert werden. > den Kehrwert bilden ist fuer ein FPGA immer Schwerstarbeit. Deshalb hatte ich ja vorgeschlagen, dass man diesen Kehrwert samt Skalierung mit dem Ansatz über eine per Excel berechnete Tabelle auch hinbekommt. Die weiters vorgeschlagene lineare Interpolation ist dabei ja vorerst mal optional. > Und nicht unbedingt Anfaengertauglich. Die Schwachpunkte der Anfängerlösung wurden ja schon angesprochen. >> genug Impulse anfallen > Er kann ja Anzahl der Hallsensoren ja vergroessern :-). > Oder ein paar Ausloesemagnete dazutun. Auf jeden Fall sollte auch eine Mittelwertbildung rein, die länger als nur über 1 Sekunde geht, damit man auch bei 10 U/min noch was Sinnvolles sieht. Wenn man es schlau macht, läuft der Mittelwert über 1 Minute im "Hintergrund", während im Vordergrund die Anzeige im Sekundentakt aktualisiert wird. Auch das ist eine nette Aufgabe. > Damit verkomplizierst du ihm den Einstieg voellig unnoetig. Ich zeige nur auf, wie es weitergehen könnte und wie ich es machen würde. Dabei muss korrekterweise durchaus bedacht werden, dass ich deutlich mehr Erfahrung habe. Aber auch ich war mal in der Situation des TO und von nix kommt nix: https://www.gutefrage.net/frage/genaue-bedeutung-vom-spruch--von-nix-kommt-nix- Wolfgang schrieb: > Ich bin schon so weit gekommen, das er mir, wenn der Sensor denn > Magneten entdeckt, mir auf den 7-Seg Display eine 1 anzeigt. Da würde ich erst mal gar nichts am FPGA machen, sondern das Allermeiste im Simulator. Geht viel schneller und ist reproduzierbar...
Hallo Danke für die Ganzen Antworten, ich habe einen Counter geschrieben, nun bekomme ich auf allen Segmenten einen Error angezeigt obwohl ich nur eins anspreche, dass macht für mich keinen Sinn.
Ohne deinen Code zu kennen können wir dir nicht helfen. Wolfgang schrieb: > Error Etwas mehr Details wären auch sinnvoll. Noch besser wäre dazu der Name der Hardware oder der Schaltplan.
> auf allen Segmenten einen Error angezeigt Ich weiss gar nicht, ob ich da noch an mehr Details ueberhaupt interessiert bin. Bis zu > Ich will es in km/h abbilden. wird es wohl noch eine Weile brauchen.
Wolfgang schrieb: > mein Name ist Wolfgang und ich wollte in meiner Freizeit an einem > Privaten Projekt Arbeiten. die scheinen sehr wichtig zu sein, wenn du sie groß schreibst > Ich habe mir in meinem Garten eine kleine Windmühle aufgestellt, von der > würde ich gerne die Geschwindigkeit messen. du würdest gerne die Drehzahl messen > Ich habe mir schon einen Sensor geholt und denn an meinem FPGA > angeschlossen. du hast "den" angeschlossen, denn "denn" wäre das falsche Wort > Ich bin schon so weit gekommen, das er mir, wenn der Sensor denn > Magneten entdeckt, mir auf den 7-Seg Display eine 1 anzeigt. s.o. Was soll das werden? Wie man eine Drehzahl (= Impulse je Zeit) berechnet ist klar? > Nun komme ich nicht weiter, ich weiss das ein Aduiono oder andere Boards > einfacher wären, das glaube ich nicht > Quellen für mich? Die Quellen bringen dir gar nichts, weil die meistens nicht dokumentiert sind und von ähnlic begabten Menschen wie dir verfasst wurden. Du musst zunächst eine Schaltung hinmalen, die deine Funktion leistet.
mein Problem ist, dass es in ModelSim alles Funktioniert, wie es Funktionieren soll. Sobald ich es auf das Board ziehe, bekomme ich einen Error, und ich weiss nicht wie ich das Debuggen kann. Da ich in der Simulation alles Funktioniert.
Und ohne Details können wir dir nicht helfen. Auch nicht wenn du weiter detailfreie Beiträge schreibst. Also was wäre sinnvoll? Name der beteiligten Boards Bilder vom Aufbau Schaltpläne Code Alles was du noch bieten kannst damit wir dir helfen können. Wolfgang schrieb: > einen Error Auch hier wäre es sinnvoll gewesen zu schreiben was für ein Fehler genau kommt mit vollständiger Fehlermeldung. Gerne auch Screenshot.
Wolfgang schrieb: > mein Problem ist, dass es in ModelSim alles Funktioniert, wie es > Funktionieren soll. In der Simulation blikt sogar eine LED, wenn wenn ich schreibe
1 | LED <= not LED after 500 ms; |
Auf realer Hardware funktioniert das nicht. > Sobald ich es Was denn? Zeig mal deinen Code und sag, was der machen soll. > auf das Board ziehe Auf welches? Mit welcher Toolchain? > bekomme ich einen Error Und der ist geheim? Wolfgang schrieb: > Hat jemand schon mal ein ähnliches Projekt gemacht Du solltest mal die Fragen zu deiner Aufgabe lesen und beantworten. Denn du hast ein Problem und mit den grausam schlechten Informationen, die du dazu gibst kann dir keiner helfen.
Angehängte Dateien:
Hallo danke erstmal, Quartus 2 FPGA: DE10-Lite Ich will, wenn der Sensor was entdeckt, das auf der 7-Seg. anzeige hochgezählt wird (x++). ich habe hier denn ganzen code gepostet.
1 | library ieee; |
2 | use ieee.std_logic_1164.all; |
3 | use ieee.numeric_std.all; |
4 | entity count is |
5 | port
|
6 | (
|
7 | clk : in std_logic; |
8 | reset : in std_logic; |
9 | S_1 : std_logic; --sensor signal |
10 | q : out integer range 0 to 2147483647; --32bit -- 16 bit 65535 |
11 | y : out std_logic |
12 | );
|
13 | end entity; |
14 | architecture rtl of count is |
15 | begin
|
16 | process (S_1, clk,reset) |
17 | variable cnt : integer range 0 to 2147483647; |
18 | begin
|
19 | |
20 | |
21 | -- IF (S_1 = '1') THEN
|
22 | --Y <= '1'; --led leuchten
|
23 | -- cnt := cnt + 1;
|
24 | --ELSE
|
25 | -- Y <= '0';
|
26 | -- END IF;
|
27 | --q <= cnt;
|
28 | |
29 | |
30 | if (rising_edge(clk)) then |
31 | if (reset = '1') then |
32 | --Reset counter 0
|
33 | cnt := 0; |
34 | elsif (S_1 = '1') then |
35 | -- count ++ y
|
36 | cnt := cnt + 1; |
37 | y <= '0'; |
38 | |
39 | end if; |
40 | end if; |
41 | |
42 | -- Output count
|
43 | q <= cnt; |
44 | end process; |
45 | end rtl; |
1 | LIBRARY IEEE; |
2 | USE IEEE.STD_LOGIC_1164.ALL; |
3 | USE IEEE.STD_LOGIC_UNSIGNED.ALL; |
4 | |
5 | ENTITY INT_TO_BCD IS |
6 | |
7 | PORT
|
8 | (
|
9 | q : in integer range 0 to 2147483647; |
10 | |
11 | BCD_OUT : out STD_LOGIC_VECTOR (3 DOWNTO 0)--:= (others => '0') |
12 | );
|
13 | |
14 | END INT_TO_BCD; |
15 | |
16 | |
17 | ARCHITECTURE arch OF INT_TO_BCD IS |
18 | --signal count_out : integer range 0 to 65535;
|
19 | |
20 | begin
|
21 | -- count_out <= 8;
|
22 | |
23 | process (q) --q |
24 | |
25 | |
26 | begin
|
27 | |
28 | case q is |
29 | when 0 => BCD_OUT <= "0000"; |
30 | when 1 => BCD_OUT <= "0001"; |
31 | when 2 => BCD_OUT <= "0010"; |
32 | when 3 => BCD_OUT <= "0011"; |
33 | when 4 => BCD_OUT <= "0100"; |
34 | when 5 => BCD_OUT <= "0101"; |
35 | when 6 => BCD_OUT <= "0110"; |
36 | when 7 => BCD_OUT <= "0111"; |
37 | when 8 => BCD_OUT <= "1000"; |
38 | when 9 => BCD_OUT <= "1001"; |
39 | when others => BCD_OUT <= "1110"; |
40 | end case; |
41 | |
42 | end process; |
43 | end arch; |
1 | LIBRARY IEEE; |
2 | USE IEEE.STD_LOGIC_1164.ALL; |
3 | USE IEEE.STD_LOGIC_UNSIGNED.ALL; |
4 | |
5 | ENTITY BCD_TO_7SEG IS |
6 | |
7 | PORT
|
8 | (
|
9 | BCD_IN : IN STD_LOGIC_VECTOR (3 DOWNTO 0); -- nur fuer simmulation stdlogic ueberall |
10 | |
11 | |
12 | a, b, c, d, e, f, g : out std_logic |
13 | );
|
14 | |
15 | END BCD_TO_7SEG; |
16 | |
17 | ARCHITECTURE arch OF BCD_TO_7SEG IS |
18 | --signal cyd : STD_LOGIC_VECTOR (3 DOWNTO 0);
|
19 | |
20 | |
21 | begin
|
22 | --cyd <= "0011";
|
23 | process (BCD_IN) |
24 | |
25 | begin
|
26 | |
27 | case BCD_IN is |
28 | when "0000" => a <= '0'; b <= '0'; c <= '0'; d <= '0'; e <= '0'; f <= '0'; g <= '1'; |
29 | when "0001" => a <= '1'; b <= '0'; c <= '0'; d <= '1'; e <= '1'; f <= '1'; g <= '1'; |
30 | when "0010" => a <= '0'; b <= '0'; c <= '1'; d <= '0'; e <= '0'; f <= '1'; g <= '0'; |
31 | when "0011" => a <= '0'; b <= '0'; c <= '0'; d <= '0'; e <= '1'; f <= '1'; g <= '0'; |
32 | when "0100" => a <= '1'; b <= '0'; c <= '0'; d <= '1'; e <= '1'; f <= '0'; g <= '0'; |
33 | when "0101" => a <= '0'; b <= '1'; c <= '0'; d <= '0'; e <= '1'; f <= '0'; g <= '0'; |
34 | when "0110" => a <= '0'; b <= '1'; c <= '0'; d <= '0'; e <= '0'; f <= '0'; g <= '0'; |
35 | when "0111" => a <= '0'; b <= '0'; c <= '0'; d <= '1'; e <= '1'; f <= '1'; g <= '1'; |
36 | when "1000" => a <= '0'; b <= '0'; c <= '0'; d <= '0'; e <= '0'; f <= '0'; g <= '0'; |
37 | when "1001" => a <= '0'; b <= '0'; c <= '0'; d <= '0'; e <= '1'; f <= '0'; g <= '0'; |
38 | when others => a <= '1'; b <= '1'; c <= '1'; d <= '1'; e <= '1'; f <= '1'; g <= '0'; |
39 | end case; |
40 | end process; |
41 | end arch; |
1 | library ieee; |
2 | use ieee.std_logic_1164.all; |
3 | |
4 | entity tb_Seg7_Comp is |
5 | end tb_Seg7_Comp; |
6 | |
7 | architecture tb of tb_Seg7_Comp is |
8 | |
9 | component Seg7_Comp |
10 | port (S_1 : in std_logic; |
11 | led_o : out std_logic_vector (6 downto 0); |
12 | reset : in std_logic; |
13 | areset : in std_logic; |
14 | inclk0 : in std_logic; |
15 | y : out std_logic; |
16 | locked : out std_logic); |
17 | end component; |
18 | |
19 | signal S_1 : std_logic; |
20 | signal led_o : std_logic_vector (6 downto 0); |
21 | signal reset : std_logic; |
22 | signal areset : std_logic; |
23 | signal inclk0 : std_logic; |
24 | signal y : std_logic; |
25 | signal locked : std_logic; |
26 | |
27 | constant TbPeriod : time := 1000 ns; -- EDIT Put right period here |
28 | signal TbClock : std_logic := '0'; |
29 | signal TbSimEnded : std_logic := '0'; |
30 | |
31 | begin
|
32 | |
33 | dut : Seg7_Comp |
34 | port map (S_1 => S_1, |
35 | led_o => led_o, |
36 | reset => reset, |
37 | areset => areset, |
38 | inclk0 => inclk0, |
39 | y => y, |
40 | locked => locked); |
41 | |
42 | -- Clock generation
|
43 | TbClock <= not TbClock after TbPeriod/2 when TbSimEnded /= '1' else '0'; |
44 | |
45 | -- EDIT: Check that inclk0 is really your main clock signal
|
46 | inclk0 <= TbClock; |
47 | |
48 | stimuli : process |
49 | begin
|
50 | -- EDIT Adapt initialization as needed
|
51 | S_1 <= '1' AFTER 0ps,'1' AFTER 10ps,'0' AFTER 20ps,'1' AFTER 30ps,'0' AFTER 40ps, '1' AFTER 50ps,'0' AFTER 60ps,'1' AFTER 70ps; |
52 | areset <= '0'; |
53 | |
54 | -- Reset generation
|
55 | -- EDIT: Check that reset is really your reset signal
|
56 | reset <= '0'; |
57 | wait for 100 ns; |
58 | reset <= '0'; |
59 | wait for 100 ns; |
60 | |
61 | -- EDIT Add stimuli here
|
62 | wait for 100 * TbPeriod; |
63 | |
64 | -- Stop the clock and hence terminate the simulation
|
65 | TbSimEnded <= '1'; |
66 | wait; |
67 | end process; |
68 | |
69 | end tb; |
70 | |
71 | |
72 | |
73 | configuration cfg_tb_Seg7_Comp of tb_Seg7_Comp is |
74 | for tb |
75 | end for; |
76 | end cfg_tb_Seg7_Comp; |
Wolfgang schrieb: > elsif (S_1 = '1') then Wie ich gleich zu Anfang schrieb: >>>> Dann solltest du dich noch zum Thema "Eintakten" bzw. >>>> "Einsynchronisieren" schlau machen, denn sonst wird dein Messwert dann >>>> und wann "spinnen". > variable cnt : integer range 0 to 2147483647; Warum verwendest du da völlig unnötigerweise eine Variable statt eines Signals? Siehe Beitrag "Variable vs Signal" > Ich will, wenn der Sensor was entdeckt, das auf der 7-Seg. anzeige > hochgezählt wird (x++). Und das funktioniert in der Testbench? Was passiert damit auf der Hardware? Welche Fehlermeldung bekommst du von welchem Teil welcher Toolchain? > ich habe hier denn ganzen code gepostet. Häng das doch besser als *.vhdl Dateien an, wie über jedem Texteingabefeld hier steht:
1 | Antwort schreiben |
2 | Wichtige Regeln - erst lesen, dann posten! |
3 | * Längeren Sourcecode nicht im Text einfügen, sondern als Dateianhang |
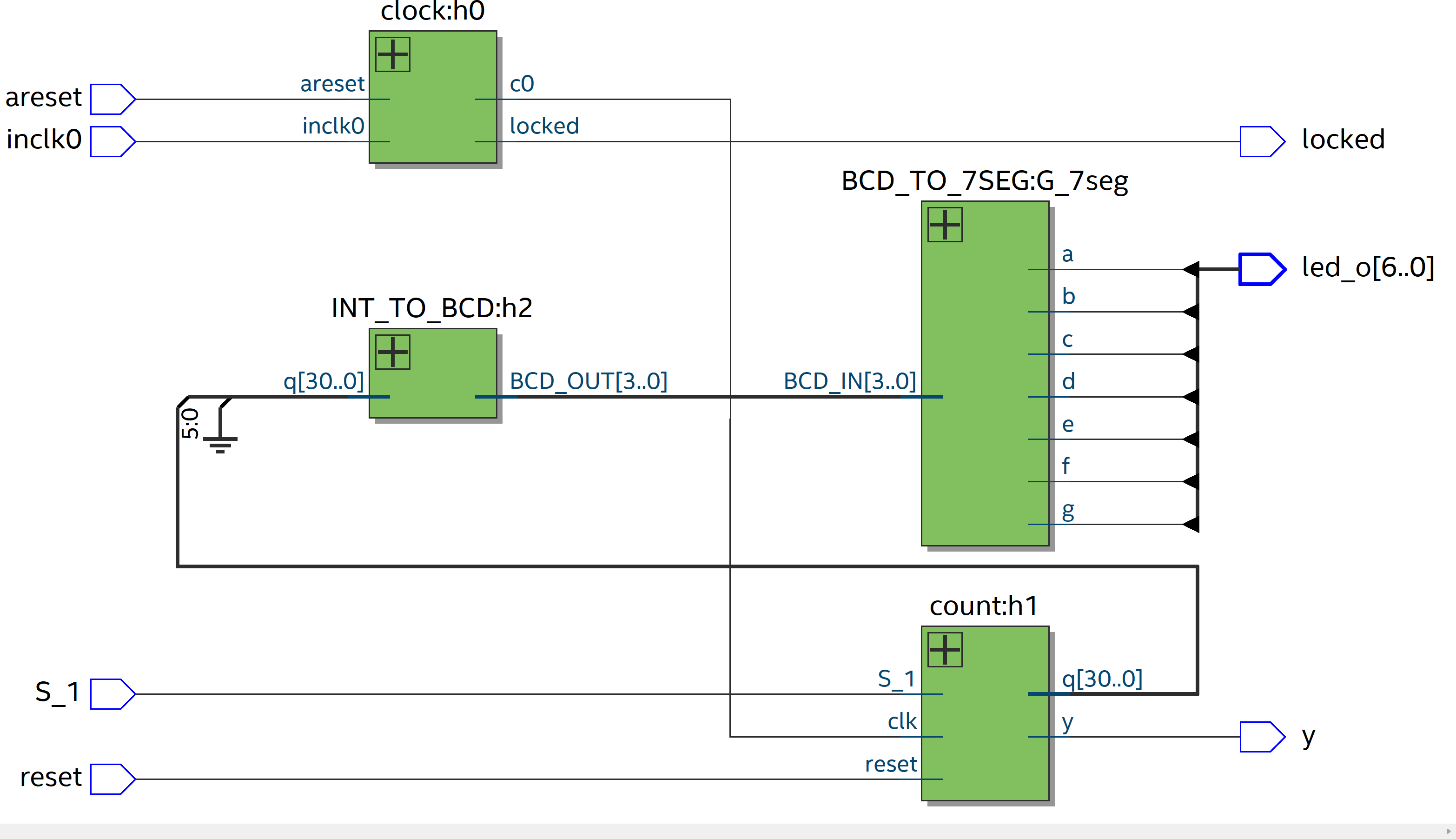
In dem "ganzen Code" fehlt die Entity Seg7_Comp, das sollte vermutlich das Toplevel-Modul sein. Was hat das gepostete Bild mit der Aufgabe zu tun? Zeigt das Bild die Module, die du implementieren und verdrahten sollst?
Lothar M. schrieb: > unnötigerweise ein Signal? Eine Variable. Und genau das ist auch das Problem. cnt ist 0 und wird in dem Takt maximal 1. Also ist auch q nur ab und zu mal für einen Takt lang 1.
-gb- schrieb: > Lothar M. schrieb: >> unnötigerweise ein Signal? > Eine Variable. Aaargh... ich habs korrigiert. Für Anfänger gilt: man benutzt keine Variable, wenn man nicht unbedingt eine braucht. -gb- schrieb: > Eine Variable. Und genau das ist auch das Problem. cnt ist 0 und wird in > dem Takt maximal 1. Also ist auch q nur ab und zu mal für einen Takt > lang 1. cnt ist eine speichernde Variable (das ist fast schon ein Kündigungsgrund!) und zählt mangels Flankenerkennung bei Betätigung von S1 mit der Taktgeschwindigkeit hoch. Also mal angenommen, der clk ist 50MHz und der Sensor belegt den S1 für 1 ms, dann hat der cnt schon auf 50000 hochgezählt... Darüber hinaus ist auch die Sensitivliste des Prozesses überdefiniert, denn Wolfgang schrieb: > process (S_1, clk,reset) Der Prozess ist vollkommen synchron zum clk und deshalb ausschließlich auf clk sensitv. Aus diesem Grund gehört auch nur clk in die Liste.
Beitrag #6907977 wurde von einem Moderator gelöscht.
Angehängte Dateien:
-

sim.png
34 KB
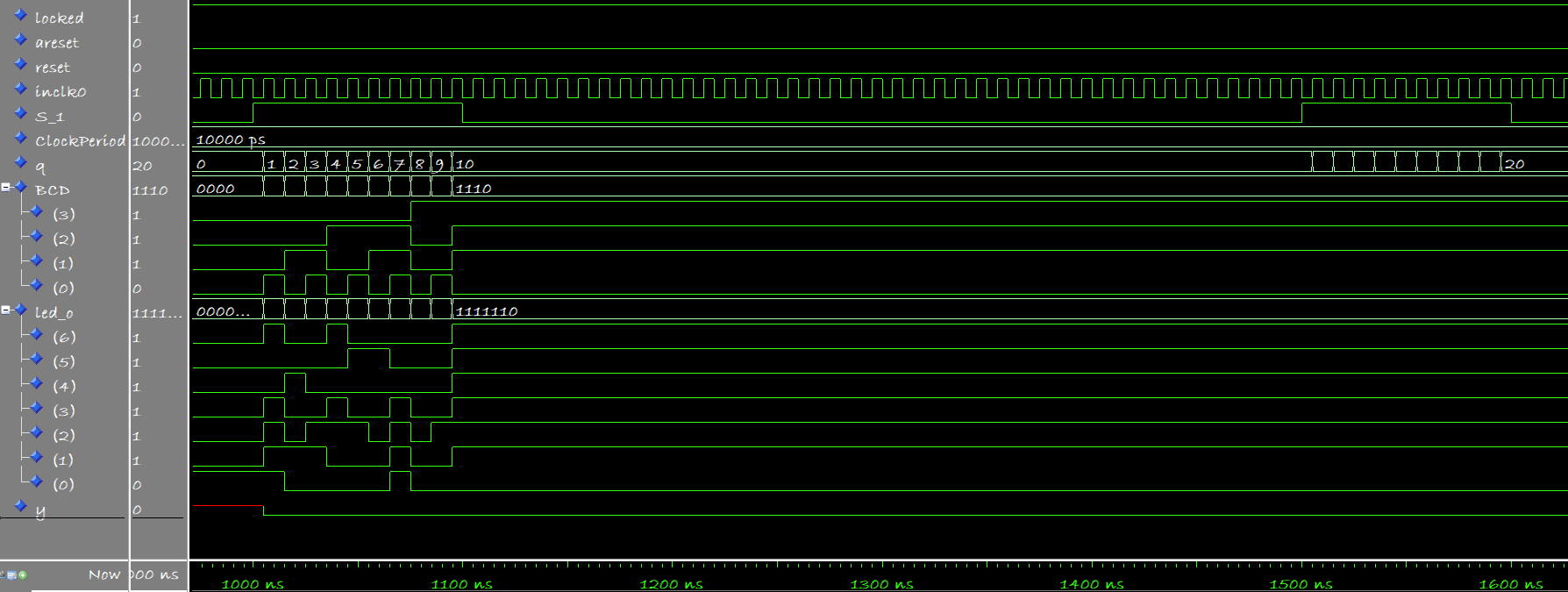
Wolfgang schrieb: > Quartus 2 > FPGA: DE10-Lite > Ich will, wenn der Sensor was entdeckt, das auf der 7-Seg. anzeige > hochgezählt wird (x++). > ich habe hier denn ganzen code gepostet. Und die restlichen Details? Inhalt der Fehlermeldung? Beim Code fehlt das Toplevel "Seg7_Comp". Edith hat gerade S_1 <= '1' AFTER 0ps,'1' AFTER 10ps,'0' AFTER 20ps,'1' AFTER 30ps,'0' AFTER 40ps, '1' AFTER 50ps,'0' AFTER 60ps,'1' AFTER 70ps; in der Testbench gefunden. Das sind eben echt kleine Zeiten. In der Simulation geht das, aber das was dann auf der Hardware gemacht wird wird sich von der Simulation deutlich unterscheiden. Daher: Simuliere immer möglichst so wie du es auch auf der Hardware erwarten würdest. Miss mit dem Oszi wie lange S_1 high und low ist und dann beschreibe das so in deiner Testbench. Edith hat hier S_1 : std_logic; --sensor signal noch ein fehlendes in oder out gefunden. Lothar M. schrieb: > cnt ist eine speichernde Variable Jap tatsächlich. Jetzt mit Bildchen sim.png man sieht schön, dass ein zweiter Puls an S_1 nichts mehr an der Anzeige ändert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.