Hallo Ich möchte gerne ein kunst Projekt starten. Hierbei möchte ich ca 30-50 goldene "winkekatzen" aufstellen die alle im selben Takt winken. Da dies mit der eingebauten auf schwung und magnet ausgelegten mechanik nicht möglich ist dachte ich an schrittmotoren. Diese mikro schrittmotoren habe ich auch schon in china bestellt und bekommen. 5stk. Für 2€ finde ich ok. Jetzt stellt sich mir die Frage des Treibers. Ansteuerung mit i2c fände ich glaube ich ganz sinnvoll um nicht im kabelgewirr zu ertrinken. Geht das überhaupt ich glaube es waren max. 32 slaves über i2c in einer sinuskurve anzusteuern? Schön wäre es auch die Möglichkeit zu haben das auch eine andere Bewegung möglich ist. Ich habe rudimentäre Kenntnisse in Sachen Mikrocontroller und i2c. Hat jemand eine Idee für einen Treiber für mich der vielleicht auch nicht ganz so teuer ist? Gruß Uli
Wenn man mehr Slaves benötigt gibt es I2C Repeater, die das Signal aktiv verstärken und somit kann man die Leitung verlängern. Allerdings finde ich I2C über Kabel (mehrere m) nicht Sinnvoll, da dafür der Bus nicht ausgelegt ist -> Fehleranfällig. Besser ist es je Katze einen keinen µC zu spendieren, der einen CAN Bus oder RS485 hat und einfach nur auf den Takt "hört", da braucht es auch keine extra Adressierung je Katze. Es gibt dann nur 1 Master im Bus und alle anderen hören nur dem Master-Takt zu. Ein µC je Katze macht den Aufbau und die Programmierung auch einfacher und man kann jedezeit die Anzahl der Katzen auf bis zu 128 Stück erhöhen ohne dass man die SW nochmal umprogrammieren müsste. Beispiel für µC der geeignet wäre: STM32F042 - hat CAN Bus - hat Timer mit 4 Kanäle und negierte Ausgänge, womit man direkt eine Schrittmotor-H-Brücke ansteuern könnte - hat I2C falls man lieber einen I2C Treiber verwenden wollte. - Aufbau mit ca. 4 IC's (µC, Spannungsregler 3,3V, CAN-Treiber, Motortreiber) Die Verkabelung wären 4-Drähte von Katze zur jeweils nächsten Katze. Wobei man die Stromaufnahme beachten sollte, ggf, an mehreren Stellen Strom einspeist.
Da hier vermutlich der Elektromagnet mit den zurückschwingenden Arm wieder aktiviert wird, wäre es vermutlich einfacher, diesen Takt extern (und damit für alle Katzen synchron) zuzuführen. Evt. ist die Amplitude dann bei einigen Katzen verringert (nicht resonant). Das könnte man dann mit Gewichten wieder ausgleichen. Wie sieht die Mimik darin denn genau aus? Mach doch mal Bilder.
Ulrich W. schrieb: > Für 2€ finde ich ok. Könnte rausgeschmissenes Geld sein, denn diese Billigsmotoren sind äusserst schwach. Ulrich W. schrieb: > Ansteuerung mit i2c fände ich glaube ich ganz sinnvoll Warum ? Alle Motoren sollen gleich laufen. Also einfach alle parallel an einen Treiber und mit denselben Signalen ansteuern. (Und falls die Ansteuierplatine schon dran ist am Motor: Alle Ansteuerplatinen mit denselben Signalen STEP/DIR versorgen durch simple Parallelschaltung der Leitungen.) Ulrich W. schrieb: > Hat jemand eine Idee für einen Treiber für mich der vielleicht auch nicht ganz so teuer ist? Gleich der zweite Fehler: Billigste Motoren dann auch noch mit der billigsten Ansteuerschaltung damit extra wenig rausgeholt werden kann. Die Motoren haben 2 Spulen und 4 Anschlüsse, wollen also bipolar versorgt werden mit 3V rms pro Spule. Wie viel Strom dabei fliesst konnte ich nicht rausfinden, also mal messen: 3V an eine Spule anlegen und Strom messen. https://de.aliexpress.com/item/Neue-5-teile-los-HEI-ER-2-Phase-4-Draht-20-Ohm-6mm-Dia-Mini-Stepper/32835139769.html sagt 20 Ohm, also 0.15Arms = 0.22Apeak. Man kann alle Motorenspulen in Reihe oder alle parallel doer eine Mischung daraus an einen Treiber anschliessen, die üblichen TB6600 https://www.ebay.de/itm/NEW-TB6600-4-5A-CNC-Single-Axis-Stepper-Motor-Driver-Board-Controller-/263558549231 versorgt mit 30V können also schon 6 parallel und 6 in Reihe vertragen eingestellt auf 1.32A (der weniger wenn weniger Kraft reicht oder mehr wenn man mehr Kraft braucht und die Motoren nur kurze Zeit laufen und dann DISABLED werden), und alle drehen dann gleichrum.
Nachteil bei Parallelschaltung: Beim Einschalten weiß man nicht wo die Motoren stehen und eine einigermaßen gleiche Positionierung ist nicht möglich -> winken zwar im gleichen Takt aber nicht mit der gleichen Position. Bei Einzelansteuerung könnte man die Arme bei Einschalten erst mal referenzieren (z.B. mit einem Schalter/Kontakt).
Markus M. schrieb: > Beim Einschalten weiß man nicht wo die Motoren stehen und eine > einigermaßen gleiche Positionierung ist nicht möglich Na ja, also erst mal alle in eine Richutng gegen einen Anschlaug laufen lassen.
Die durch Schrittmotoren angesteuerten Arme werden bestimmt nicht so schön winken, wie die ursprünglichen. Könnte mir vorstelen, dass es ehr wie Holzhacken aussehen wird. Ich würde es erstmal mit der vorhandenen Elektronik versuchen. Nimm drei Katzen und versorge sie alle über eine Spannungsquelle, die du mit nem Taster im Takt schalten kannst. Aber coole Idee :-)
Kolja L. schrieb: > Die durch Schrittmotoren angesteuerten Arme werden bestimmt nicht so > schön winken, > wie die ursprünglichen. > Könnte mir vorstelen, dass es ehr wie Holzhacken aussehen wird. Obwohl die Dinger "Schrittmotoren" heißen, darf man sie gerne mit einem sinusförmigen Signal ansteuern. Dann hackt da nichts. Der Mikroschrittbetrieb wurde schon erfunden.
Michael B. schrieb: > Ulrich W. schrieb: >> Für 2€ finde ich ok. > > Könnte rausgeschmissenes Geld sein, denn diese Billigsmotoren sind > äusserst schwach. Sind ganz sicher viel zu schwach. Das Trägheitsmoment des Arms ist zu groß. Motore mit brauchbarer Leistung bekommt man auch in China nicht für das Geld. Wolfgang schrieb: > Obwohl die Dinger "Schrittmotoren" heißen, darf man sie gerne mit einem > sinusförmigen Signal ansteuern. Dann hackt da nichts. > Der Mikroschrittbetrieb wurde schon erfunden. Mikroschritt ist nicht wirklich der Punkt, das freie Pendeln des Armes nachzubilden ist das Problem. Das gibt eine ziemlich komplexe Beschleunigungs und Abbremsfunktion. MfG Klaus
Klaus schrieb: > Das gibt eine ziemlich komplexe Beschleunigungs und Abbremsfunktion. Ein NE555 ist da natürlich etwas überfordert. Wenn die Dinger schon alle synchron winken sollen, soll sich der µC dabei wenigstens nicht langweilen ;-)
Danke erst mal für die vielen Antworten. Andreas B. schrieb: > Da hier vermutlich der Elektromagnet mit den zurückschwingenden Arm > wieder aktiviert wird, wäre es vermutlich einfacher, diesen Takt extern > (und damit für alle Katzen synchron) zuzuführen. Evt. ist die Amplitude > dann bei einigen Katzen verringert (nicht resonant). Das könnte man dann > mit Gewichten wieder ausgleichen. Ich denke nicht dass das möglich ist da so ein schwingendes System nicht präzise gesteuert werden kann. Wenn soetwas länger läuft wird es sich unweigerlich zerstreuen. Markus M. schrieb: > Beim Einschalten weiß man nicht wo die Motoren stehen und eine > einigermaßen gleiche Positionierung ist nicht möglich -> winken zwar im > gleichen Takt aber nicht mit der gleichen Position. > Bei Einzelansteuerung könnte man die Arme bei Einschalten erst mal > referenzieren (z.B. mit einem Schalter/Kontakt) Das müsste auf jeden Fall mittels mikroschalter gelöst werden damit die Schrittmotoren am Anfang einen Referenzpunkt haben. Klaus schrieb: > Sind ganz sicher viel zu schwach. Das Trägheitsmoment des Arms ist zu > groß. Motore mit brauchbarer Leistung bekommt man auch in China nicht > für das Geld. Der Arm von so einer Figur hat ja kaum Gewicht. Klaus schrieb: > Mikroschritt ist nicht wirklich der Punkt, das freie Pendeln des Armes > nachzubilden ist das Problem. Das gibt eine ziemlich komplexe > Beschleunigungs und Abbremsfunktion. Ich denke eine Sinusfunktion ist schon mal ein ganz guter Ansatz. Da ist die Beschleunigung und das Abbremsen ja schon mit drin. Den Rest kann man dann noch "tweaken"
Ulrich W. schrieb: > Ich denke eine Sinusfunktion ist schon mal ein ganz guter Ansatz. Da ist > die Beschleunigung und das Abbremsen ja schon mit drin. Nein, eine Sinusfunktion für den Phasenstrom (genauer zwei phasenverschobene für die beiden Wicklungen) als Idealform beim hochaufgelösten Mikroschrittbetrieb liefert eine lineare Drehbewegung mit konstanter Winkelgeschwindigkeit.
Andreas B. schrieb: > Da hier vermutlich der Elektromagnet mit den zurückschwingenden Arm > wieder aktiviert wird, wäre es vermutlich einfacher, diesen Takt extern > (und damit für alle Katzen synchron) zuzuführen. Evt. ist die Amplitude > dann bei einigen Katzen verringert (nicht resonant). Das könnte man dann > mit Gewichten wieder ausgleichen. Ich könnte mir auch vorstellen, dass man den Kätzchen einen externen Takt aufzwingen kann (nahe der Eigenfrequenz) ohne den Antrieb auf Motor umbauen zu müssen. Alle Arme synchron winken zu lassen ist sicherlich schon eine sehr hübsche Sache, man könnte dann im 2. Schritt evtl. die Takte leicht zueinander verschieben, und je nach Anordnung der Katzen eine Art 3D-"La Ola" erzeugen.
By the way. Weiß jemand wie diese winkekatzen eigentlich funktionieren. Auseinander gebaut habe ich natürlich schon eine aber mit meinem elektronik Verständnis werde ich nicht schlau daraus.
Da ist einfach eine Spule drin, die im richtigen Moment einen Stromstoß bekommt, und so den Arm mit einem kleinen Impuls ein wenig beschleunigt (am Arm ist ein Dauermagnet befestigt). Gerade so viel, dass die Reibungsverluste ausgeglichen werden. Das komplizierteste daran ist die Detektorschaltung, die den richtigen Zeitpunkt für den Impuls bestimmt. Wenn du also die Frequenz der Impulse kennst, sollte man die Spule auch einfach mit einem externen Taktgeber anregen können und beim "Anwerfen" der Katze ein bischen Geduld haben, bis der Arm mit dem externen Takt mitschwingt.
Wolfgang schrieb: > Ulrich W. schrieb: >> Ich denke eine Sinusfunktion ist schon mal ein ganz guter Ansatz. Da ist >> die Beschleunigung und das Abbremsen ja schon mit drin. > > Nein, eine Sinusfunktion für den Phasenstrom (genauer zwei > phasenverschobene für die beiden Wicklungen) als Idealform beim > hochaufgelösten Mikroschrittbetrieb liefert eine lineare Drehbewegung > mit konstanter Winkelgeschwindigkeit. Hmmm. Wieso phasenstrom? Die zeit ist die y achse und die auslenkung ist die x achse. Ergo pendelnde Bewegung oder nicht?
Ulrich W. schrieb: > Ergo pendelnde Bewegung oder nicht? Guck dir hier die Mikroschritt Simulation für einen Schrittmotor an: https://de.nanotec.com/support/knowledge-base-pages/schrittmotor-animation/?tx_nanotec_animation%5Binitial%5D=motor_4lead Der Strom für die beiden Wicklungen beschreibt im Mikroschrittbetrieb über die Zeit etwa einen Sinus (Phasenversatz entsprechen 90° zwischen Strom A und B = 8 Schritte in der Simulation). Daraus resultiert eine gleichmäßige Drehbewegung.
Ulrich W. schrieb: > > Ich denke nicht dass das möglich ist da so ein schwingendes System nicht > präzise gesteuert werden kann. Wenn soetwas länger läuft wird es sich > unweigerlich zerstreuen. > Natürlich kann es das. Wenn alle Arme synchron mit einer externen Taktquelle angesteuert werden, bleibt denen gar nichts anderes übrig, als synchron zu laufen.
Mikroschritt dürfte bei diesen Minimotoren nur bedingt sinnvoll sein. Dann müsste man auch mit einer Spannung deutlich über der Wicklungs-/Nennspannung arbeiten und eine Stromregelung vorsehen. Bei einem Motor mit 200mA Nennstrom ganz schöner Overkill. Wieviele Schritte haben die Dinger überhaupt? Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Dann müsste man auch mit einer Spannung deutlich über der > Wicklungs-/Nennspannung arbeiten und eine Stromregelung vorsehen. Warum soll PWM bei Nennspannung nicht funktionieren?
Hallo Wolfgang, Wolfgang schrieb: > Thorsten O. schrieb: >> Dann müsste man auch mit einer Spannung deutlich über der >> Wicklungs-/Nennspannung arbeiten und eine Stromregelung vorsehen. > > Warum soll PWM bei Nennspannung nicht funktionieren? Weil die Wicklung schon bei geringen Geschwindigkeiten nicht mehr ihren Nennstrom erreicht. D.h. die Stromregelung wird gar nicht aktiv. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Weil die Wicklung schon bei geringen Geschwindigkeiten nicht mehr ihren > Nennstrom erreicht. D.h. die Stromregelung wird gar nicht aktiv. Für so eine Aussage müsste man erstmal etwas über die Induktivität und die erforderliche (Vollschritt-)Schrittfrequenz wissen. Zumindest bei stillstehendem Motor und PWM-Betrieb mit Nennspannung (also keine Stromregelung) und ausreichend hoher PWM-Frequenz fließt der Nennstrom multipliziert mit dem Tastverhältnis. Warum soll da Mikroschrittbetrieb nicht funktionieren?
Wolfgang schrieb: > > Für so eine Aussage müsste man erstmal etwas über die Induktivität und > die erforderliche (Vollschritt-)Schrittfrequenz wissen. > Braucht man nicht. Kein Schrittmotor wird bei Nennspannung seine Leistung erreichen. Hier kannst Du z.B. mal etwas über Schrittmotore lesen: https://www.omega.de/prodinfo/schrittmotoren.html
Ulrich W. schrieb: > Weiß jemand wie diese winkekatzen eigentlich funktionieren. Wie ein "elektrisches Uhrwerk" (ohne Quartz) https://de.wikipedia.org/wiki/Datei:Elektrisches_Uhrwerk_mit_Sperrschwinger.JPG Schaltplan ist dabei.
Jetzt ist die Diskussion ein bisschen eingeschlafen und hat sich auch von der ursprünglichen Frage entfernt. Ich sage mal ja zu der Lösung mit einer externen Takt Quelle. Das wäre eine einfache Lösung und würde wahrscheinlich/sicher funktionieren. Aber trotzdem würde ich mich gerne mit dem Thema I2C schrittmotor Treiber beschäftigen. Jemand hierzu eine gute Lösung? Kabelwege sind kein Problem da das alles auf einem quadratmeter stattfinden soll.
Andreas B. schrieb: > Braucht man nicht. Kein Schrittmotor wird bei Nennspannung seine > Leistung erreichen. Genau um zu beurteilen, ob man mit Nennspannung das Ding vernünftig zum Steppen kriegt, muss man wissen, mit welcher Schrittfrequenz der TO den Motor betreiben möchte. Und genau um abschätzen zu können, bei welcher Schrittfrequenz man den Motor noch bei Nennspannung betreiben kann, braucht man die Induktivität. Denk noch mal drüber nach.
Ulrich Wallis schrieb: > Jetzt ist die Diskussion ein bisschen eingeschlafen... Volle Zustimmung! Wolfgang schrieb: > Denk noch mal drüber nach. Da brauche ich nicht drüber nachzudenken. Kein Schrittmotor kann seine spezifizierte Leistung bei Nennspannung erreichen. Die Nennspannung ist die Gleichspannung, die der Motor aushält und bei der sich der Nennstrom einstellt. Sprich 0Hz Schrittfrequenz. Das was Du jetzt rechnen willst ist, wie man einen überdimensionierten Motor mit Nennspannung betreibt und dabei noch die geforderte Leistung bringt. Da nehme ich doch lieber einen passenden Stepper und betreibe den mit Überspannung, damit er auch seinen spezifizierten Strom erreicht. Die benötigte Frequenz kann man hier übrigens leicht abschätzen: Bei 200 Steps / turn hast Du bei einer Winkekatze etwa (2x Winken/s und 90° winken) 1 U/s, also ca. 200Hz. Das hilft Dir aber auch wenig, weil Du sonst von diesen China Motörchen keine weiteren Daten bekommen wirst. Aber, wie ich schon erwähnte: Die Lösung mit Schrittmotoren ist Overkill. Alle vorhandenen Magnete synchron ansteuern und gut ist.
Andreas B. schrieb: > Da brauche ich nicht drüber nachzudenken. Kein Schrittmotor kann seine > spezifizierte Leistung bei Nennspannung erreichen. Wer sagt denn, dass der TO dem Schrittmotor die spezifizierte Leistung (spezifiziertes Drehmoment über vollen Schrittfrequenzbereich) entnehmen möchte. Du tust so, als ob Schrittmotoren ohne Treiber mit Stromregelung nicht nutzbar wären.
Andreas B. schrieb: > Das hilft Dir aber auch wenig, weil > Du sonst von diesen China Motörchen keine weiteren Daten bekommen wirst. Was auch immer "diese Schrittmotoren" für Typen sind - der TO hat sie vorliegen und kann messen. Ein bisschen Selbständigkeit wird eben oft voraus gesetzt, wenn man seine Teile aus China bezieht.
Wolfgang schrieb: > Du tust so, als ob Schrittmotoren ohne Treiber mit Stromregelung nicht > nutzbar wären. Das nicht, aber sehr sinnvoll ist das nicht.
Also ich glaube das diese ganze Nennstrom usw. Diskussion nicht so ganz nötig ist. Wie schon im ersten Posting erwähnt habe ich nur rudimentäre Kenntnisse in Sachen schrittmotor. Hauptsache durch meinen 3d drucker. Ich denke aber dass so ein Motor den nur wenige gramm leichten Arm der auch noch ausbalanciert ist bewegen kann. Da ist sogar noch ein zahnrad dran. Kann also auch eine Übersetzung machen. Ich glaube ich werde einen der motörchen mal mit einem l298 platinchen ansteuern und sehen was rauskommt. Dann melde ich mich wieder.
Wenn Du es unbedingt so umständlich machen willst, bitte sehr. Die weitwaus einfachere Lösung mit der synchronen Ansteuerung wurde Dir ja mehrfach genannt. Daß Du bei der Schrittmotorsteuerung wohl nicht mehr mit Batterien auskommmst (jedenfalls wenn Du sie nicht jeden Tag wechseln willst) ist Dir bewußt?
Andreas B. schrieb: > Wenn Du es unbedingt so umständlich machen willst, bitte sehr. > Die weitwaus einfachere Lösung mit der synchronen Ansteuerung wurde Dir > ja mehrfach genannt. Und ich habe auch schon zugestimmt dass es die einfachste Lösung wäre. Ich habe aber auch erwähnt dass die Katzen evtl. noch etwas anderes machen sollen außer winken. Andreas B. schrieb: > Daß Du bei der Schrittmotorsteuerung wohl nicht mehr mit Batterien > auskommmst (jedenfalls wenn Du sie nicht jeden Tag wechseln willst) ist > Dir bewußt? Irgendjemand hat vor langer Zeit Netzteile und Kabel erfunden.
Ulrich Wallis schrieb: > Ich habe aber auch erwähnt dass die Katzen evtl. noch etwas anderes > machen sollen außer winken. Das habe ich jetzt nicht gesehen. Das ändert natürlich die Randbedingungen. Ulrich Wallis schrieb: > Irgendjemand hat vor langer Zeit Netzteile und Kabel erfunden. Das habe ich auch nicht abgestritten. ;-) Ich wollte nur sichergehen daß Dir bewußt ist, daß der Stromverbrauch jetzt immens ansteigt. Übrigens braucht man auch bei der Synchronlösung Kabel. Das war also nie die Frage. Bevor Du Dir jetzt einen Satz historischer L298 Platinen besorgst: Es gibt mittlerweise Neueres am Markt) In der Bucht z.B. Module mit TB6612FNG oder etwas moderner: DRV8825, A3967 für nen Appel und ein Ei).
Beitrag #5549658 wurde von einem Moderator gelöscht.
Eine einfache vor und zurückbewegung mit einem Schrittmotor? Mir fällt dazu ein Servo ein. In der Größe saubillig. Und als Hinweis: ich hab mir mal einen 2,50Euro Servotester gekauft. Der kann rechtsrum, linksrum und - überraschung - hin-und-herpendeln im Dauerbetrieb ;-) Walta
Andreas B. schrieb: > Bevor Du Dir jetzt einen Satz historischer L298 Platinen besorgst: Es > gibt mittlerweise Neueres am Markt) In der Bucht z.B. Module mit > TB6612FNG oder etwas moderner: DRV8825, A3967 für nen Appel und ein Ei). > Du hast leider nicht ins DB vom L298N geschaut, der kann nämlich durch parallelschalten seiner beiden Ausgänge 4A treiben. Diesen Strom braucht der Kollege höchst wahrscheinlich nicht, aber ich finde, wenn man hier schon Alternativern nennt, sollten diese auch wirklich kompatibel sein oder wenigstens der Unterschiede genannt werden. Wie es mit der Abfuhr der Verlustleistung aussieht, habe ich jetzt nicht verglischen. Beitrag "Re: Motorsteuerung mit L298N und Attiny" Bernd_Stein
Bernd S. schrieb: > Du hast leider nicht ins DB vom L298N geschaut, der kann nämlich durch > parallelschalten seiner beiden Ausgänge 4A treiben. > > Diesen Strom braucht der Kollege höchst wahrscheinlich nicht So ist es. Den braucht er bei diesen Minimotörchen mit Sicherheit nicht. Ich kenne den L298 übrigens sehr gut, weil ich den im letzten Jahrtausend des öfteren verwendet habe.
Andreas B. schrieb: > Ich kenne den L298 übrigens sehr gut, weil ich den im letzten > Jahrtausend des öfteren verwendet habe. > Kannst du mir dann auch hierbei helfen, also einen modernen Treiber nennen der 4A kann ? Beitrag "Re: CRS Robotics A255 Roboterarm" Bernd_Stein
Wäre es nicht einfacher, die Arme mit Seilzügen zu versehen die dann alle zu einem gemeinsamen Antrieb mit einem simplen Exzenter und Elektromotor. https://upload.wikimedia.org/wikipedia/commons/thumb/9/9b/Eccentric_animation.gif/220px-Eccentric_animation.gif Immer, wenn die Seile gezogen werden, gehen die Arme hoch. https://hexenschuss.de/dbpicture.axd?name=schulter-seilzug-01.jpg (SCNR)
Bernd S. schrieb: > Kannst du mir dann auch hierbei helfen ? Ich habe mich mal dazu ausgelassen obwohl das mit den L298 eigentlich weniger zu tun hat als vielmehr mit Datenblatt interpretieren.
Habe einen A4988 StepStick, welchen ich ins RAMPS v1.4 gesteckt habe und nicht zum Laufen bekomme. VMOT = 12V 2B = 0,7V 2A = 0,7V 1A = 0,3V 1B = 0,3V VDD = 5,10V DIR = auf Masse STEP = 5V Rechteck mit 50Hz /SLEEP = 5,05V /RESET = 5,05V MS1-3 = 0V alle Jumper gezogen /ENABLE= 4,64V POTI = Auf 1,2V gestellt. Habe 4 Stück getestet und alle funktionieren nicht. Zerstört man diesen StepStick, wenn das Rechtecksignal an STEP anliegt, aber der Chip nicht mit 5V an VDD versorgt wird ? Hier gibt es weitere Informationen bzw. Fragen. Beitrag "Fragen rundum OpenPnP" Bernd_Stein
Bernd S. schrieb: > Zerstört man diesen StepStick Nun, zumindest die Beschreibung gelesen ? Warning: This carrier board uses low-ESR ceramic capacitors, which makes it susceptible to destructive LC voltage spikes, especially when using power leads longer than a few inches. Under the right conditions, these spikes can exceed the 35 V maximum voltage rating for the A4988 and permanently damage the board, even when the motor supply voltage is as low as 12 V. One way to protect the driver from such spikes is to put a large (at least 47 µF) electrolytic capacitor across motor power (VMOT) and ground somewhere close to the board. Warning: Connecting or disconnecting a stepper motor while the driver is powered can destroy the driver. (More generally, rewiring anything while it is powered is asking for trouble.) So schlau ist Vollschritt übrigens nicht wenn man schon einen Mikroschrittreiber gekauft hat.
Bernd S. schrieb: > Habe 4 Stück getestet und alle funktionieren nicht. Kein Wunder, wenn du alle 4 gleich falsch angesteuert hast. Was meinst du, was der "/" vor einigen Signalnamen bedeutet. Im Datenblatt des A4988 auf S.10 liest man z.B. zu "/Enable": "When set to a logic high, the outputs are disabled". Und damit kann der Motor nun ganz sicher nicht steppen.
Ulrich W. schrieb: > Ich denke nicht dass das möglich ist da so ein schwingendes System nicht > präzise gesteuert werden kann. Wenn soetwas länger läuft wird es sich > unweigerlich zerstreuen. Unter Umständen passiert aber auch genau das Gegenteil: https://wissenschaft3000.wordpress.com/tag/synchron-schwingung/
Angehängte Dateien:
-

A4988_Aufbau_9704.jpg
240 KB
Wolfgang schrieb: > Kein Wunder, wenn du alle 4 gleich falsch angesteuert hast. > Was meinst du, was der "/" vor einigen Signalnamen bedeutet. > Danke, genau das war's. Irgendwie weil alle "/"-Signalnamen Highpotential hatten, war ich darauf fixiert. Beim Testen war mir aufgefallen, das der DVD-Laufwerksschrittmotor total heiß wurde. Jetzt habe ich mittels des Poti's das so eingestellt (0,36V ), das im Vollschritt mit 1kHz angesteuert werden kann, und die Welle auch bei einer Blockierung wieder anläuft, wenn diese wieder weg ist. Alles wird mit 5V Versorgt und die Temperaturen am Motor habe ich mal bei allen Schrittweiten bei drei verschiedenen Frequenzen gemessen, die der Transistortester hier aus dem Forum erzeugt. Ich wollte einfach mal gucken, bis zu welcher Frequenz dies möglich ist. Leider kommt beim Transistortester nach den 1kHz bereits 2,5kHz, wo der Motor sich nicht mehr dreht. Die meiste Kraft erwarte ich im Vollschritt, mal sehen wie ich das testen werde. Übrigens kann Z-Step angeschlossen bleiben, auch wenn die Versorgungsspannung aus,- und eingeschaltet wird. Beim IC-Wechsel klemme ich diese Strippe jedoch ab. Vollschritt ( keine Brücken MS1-MS3 ) 50Hz, 51,1°C 250Hz, 64,3°C 1kHz, 55,0°C 1/2 ( MS1 ) 50Hz, 55,2°C 250Hz, 55,7°C 1kHz, 54,8°C 1/4 ( MS2 ) 50Hz, 54,0°C 250Hz, 55,5°C 1kHz, 56,3°C 1/8 ( MS1 & MS2 ) 50Hz, 55,7°C 250Hz, 55,3°C 1kHz, 53,1°C 1/16 ( MS1-3 ) 50Hz, 50,4°C 250Hz, 51,4°C 1kHz, 52,7°C Bernd_Stein
Bernd S. schrieb: > Alles wird mit 5V Versorgt und die Temperaturen am Motor habe ich mal > bei allen Schrittweiten bei drei verschiedenen Frequenzen gemessen, die > der Transistortester hier aus dem Forum erzeugt. Wie du siehst, hängt die Temperatur nicht von der Frequenz ab. Selbst im Stand ist die Verlustleistung etwa gleich, weil der Spulenstrom unabhängig von der Schrittfrequenz ist, solange die Induktivität den Stromfluss nicht nennenswert behindert. > Ich wollte einfach mal gucken, bis zu welcher Frequenz dies möglich ist. Mit 5V als Betriebsspannung für den Motor kommst du da nicht weit. > Leider kommt beim Transistortester nach den 1kHz bereits 2,5kHz, wo der > Motor sich nicht mehr dreht. Eine größere, sprunghafte Änderung der Schrittfrequenz mag so ein Schrittmotor gar nicht, weil er seine Drehende Masse beschleunigen muss. Der braucht Frequenzrampen. > Die meiste Kraft erwarte ich im Vollschritt, mal sehen wie ich das > testen werde. Die Kraft ist vom Modus unabhängig. Bei höheren Schrittmodi wird der Strom nur nicht so hart umgeschaltet, d.h. der Motor läuft ruhiger. Am Drehmoment ändert das aber, bis auf Resonanzanregungen, nichts.
Wolfgang schrieb: > Wie du siehst, hängt die Temperatur nicht von der Frequenz ab. > Ein wenig schon. Habe im Datenblatt bemerkt, das für den Motor ( VMOT ) mindestens 8V vorgeschrieben werden. Da der Strom ja begrenzt wird, denke ich das es nicht schlimm ist diesen DVD-Laufwerksschrittmotor mit 9V zu betreiben. Diese habe ich gewählt, damit der 7805 seine 3V Mindestregelspannung erhält und 9V geläufiger ist als 8V. Mit meinem c't DDS Funktionsgenerator konnte ich bei 9V VMOT und 0,36V Potieinstellung den Motor mit 15,5kHz, 5V Rechteck an Z-Step bei 1/16 Schritt betreiben. Hierbei läuft er nach einer Blockierung wieder normal weiter. Dabei wurde er aber 75,2°C heiß. Mit 1kHz waren es 68,5°C. Ich denke ich werde wieder auf " alles mit 5V " zurückgehen, denn da erscheinen mir die Motortemperaturen noch erträglich und der A4988 scheint ja auch hiermit seine Arbeit zu tun. Bernd_Stein
Ach, weil es so ein geiles Projekt ist ( c't-Lab ) hier noch der Link hierzu, zum DDS-Funktionsgenerator und zum Forum : https://www.heise.de/ct/projekte/machmit/ctlab/wiki https://www.heise.de/ct/artikel/Schwingungsformer-291122.html https://thoralt.de/phpbb/index.php Bernd_Stein
Hallo Michael, Michael B. schrieb: > Nun, zumindest die Beschreibung gelesen ? > > Warning: This carrier board uses low-ESR ceramic capacitors, which makes > it susceptible to destructive LC voltage spikes, especially when using > power leads longer than a few inches. Under the right conditions, these > spikes can exceed the 35 V maximum voltage rating for the A4988 and > permanently damage the board, even when the motor supply voltage is as > low as 12 V. One way to protect the driver from such spikes is to put a > large (at least 47 µF) electrolytic capacitor across motor power (VMOT) > and ground somewhere close to the board. Das ist eine freundliche Umschreibung für: Wir wollten unser Board unbedingt super klein, fancy und cheap machen, und haben daher auf die elementare Grundbeschaltung (z.B. ausreichend großer Elko) verzichtet. Also lieber Kunde, löte ihn bitte exern an... Mit freundlichen Grüßen Thorsten Ostermann
Beitrag #7517086 wurde von einem Moderator gelöscht.
Beitrag #7517094 wurde von einem Moderator gelöscht.
Beitrag #7517099 wurde von einem Moderator gelöscht.
Angehängte Dateien:
-

TB67S109_CLK_Alles.jpg
100 KB
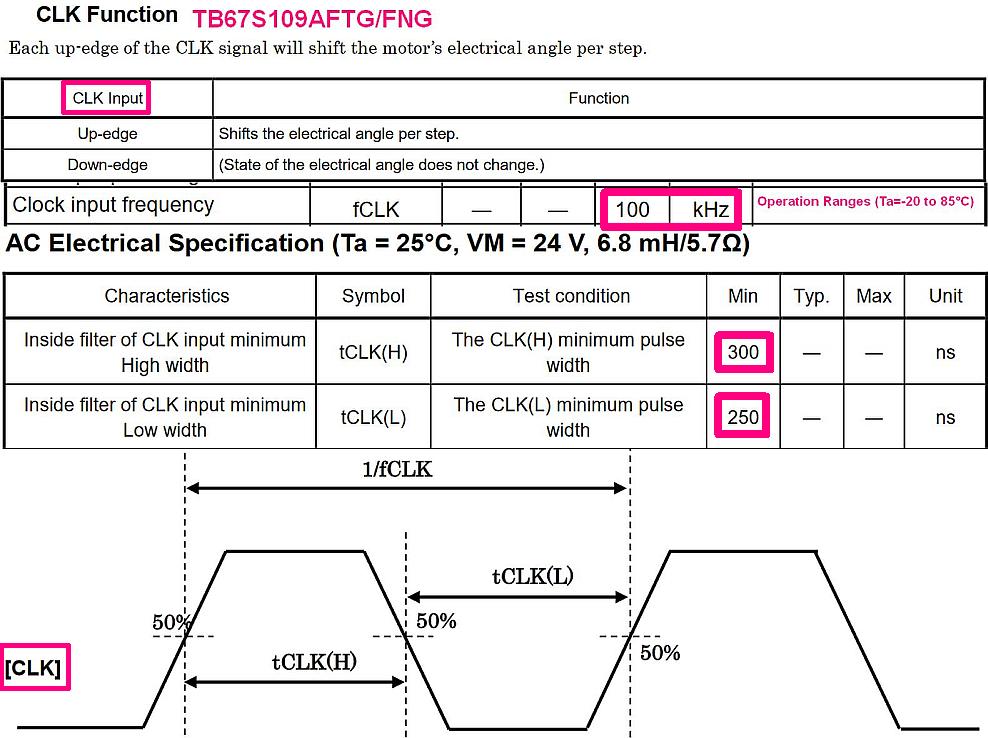
Hallo zusammen, es geht um den oben genannten SM-Treiber. Was sollen die Angaben tCLK(H) 300ns & tCLK(L) 250ns ( fCLK ca. 1,6 MHz ), wenn der Treiber ja anscheinend nur mit 100kHz ( 10µs ) getaktet werden kann? Bernd_Stein
Bernd S. schrieb: > Was sollen die Angaben tCLK(H) 300ns & tCLK(L) 250ns ( fCLK ca. 1,6 MHz > ), wenn der Treiber ja anscheinend nur mit 100kHz ( 10µs ) getaktet > werden kann? Was holst Du so einen alten Beitrag wieder hervor! BTW: Frequenz und Pulsdauer sind zwei verschiedene Dinge.
Angehängte Dateien:
-

TB67S109_CLK_Oszi.jpg
82 KB
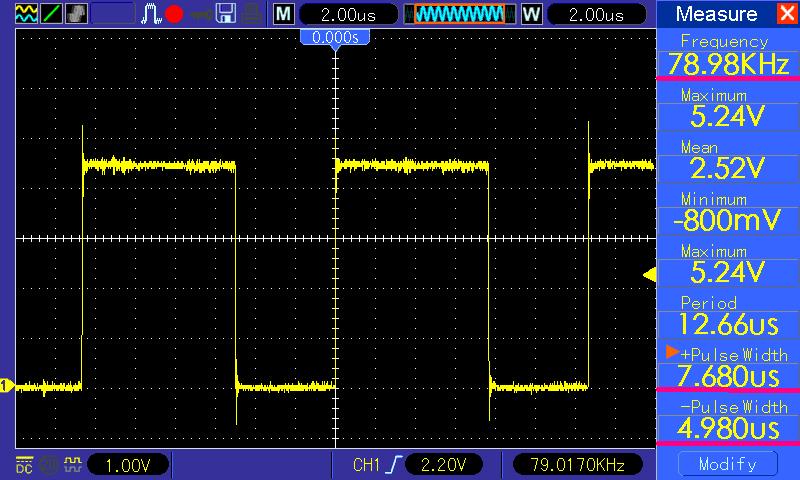
Wilhelm M. schrieb: > BTW: Frequenz und Pulsdauer sind zwei verschiedene Dinge. > Für mich hängen die schon eng miteinander zusammen. Pulsdauer H + Pulsdauer L = Frequenz Im Anhang noch mein unsymetrischer Takt, der aber funktionieren sollte oder? Bernd_Stein
Bernd S. schrieb: > Pulsdauer H + Pulsdauer L = Frequenz Also je länger die Impulse dauern, umso höher ist die Frequenz. Hmmmm...
Da steht aber Minimum Pulse width. Und beide auf Minimum überschreiten die maximale Frequenz, also muss mindestens eine Pulsbreite größer sein.
Bernd S. schrieb: > Wilhelm M. schrieb: >> BTW: Frequenz und Pulsdauer sind zwei verschiedene Dinge. >> > Für mich hängen die schon eng miteinander zusammen. > > Pulsdauer H + Pulsdauer L = Frequenz Blödsinn. Kleiner Tipp, wenn man mit Größengleichungen hantiert: auf der linken und auf der rechten Seite muss dieselbe phys. Einheit stehen. Bsp: Deine Frequenz ist 100KHz, das entspricht einer Periodendauer von 10µs. Die minimale Pulsdauer (H) ist 300ns. Also ist der dann folgende L-Puls maximal 10µs - 300ns = 9,7µs lang. Und dies ist zum Glück größer als die minimalen 200ns dafür.
Steve van de Grens schrieb: > Also je länger die Impulse dauern, umso höher ist die Frequenz. Hmmmm... > [] PulsdauerH + PulsdauerL = Frequenz [/] Das soll man nicht als Gleichung bzw. Formel verstehen, sondern das beide Pulsdauer zusammen halt die Frequenz ergeben. Wilhelm M. schrieb: > Bsp: Deine Frequenz ist 100KHz, das entspricht einer Periodendauer von > 10µs. Die minimale Pulsdauer (H) ist 300ns. Also ist der dann folgende > L-Puls maximal 10µs - 300ns = 9,7µs lang. Und dies ist zum Glück größer > als die minimalen 200ns dafür. > Danke, dann bin ich ja mit meinen 79 kHz und der PulsdauerH = 7,68µs und PulsdauerL = 4,98µs super im Rahmen. Bernd_Stein
Bernd S. schrieb: > Wilhelm M. schrieb: >> BTW: Frequenz und Pulsdauer sind zwei verschiedene Dinge. >> > Für mich hängen die schon eng miteinander zusammen. > > Pulsdauer H + Pulsdauer L = Frequenz Guck einmal auf die Spaltenüberschrift und die Bedeutung der Zeile. Die Angaben bezeichnen die Minimalwerte, die von den internen Filtern noch durchgelassen werden. Du willst doch hoffentlich nicht beide Werte gleichzeitig auf ihren Minimalwert stellen? Dann hättest du nämlich wirklich ein Problem mit der Frequenz. p.s. Was hat dein Thema mit Winkekatzen zu tun? Hast du den Eröffnungspost überhaupt gelesen?
Bernd S. schrieb: > Was sollen die Angaben tCLK(H) 300ns & tCLK(L) 250ns ( fCLK ca. 1,6 MHz > ), wenn der Treiber ja anscheinend nur mit 100kHz ( 10µs ) getaktet > werden kann? Ja nun, weder der high Impuls noch der low-Impuls darf kürzer sein, Wiederholrate maximal 100kHz.
Bernd S. schrieb: > es geht um den oben genannten SM-Treiber. Beginne für eine VÖLLIG NEUE Frage einen NEUEN Thread! Das wurde dir schon einige Male gesagt, warum beachtest du es nicht?
Angehängte Dateien:
-

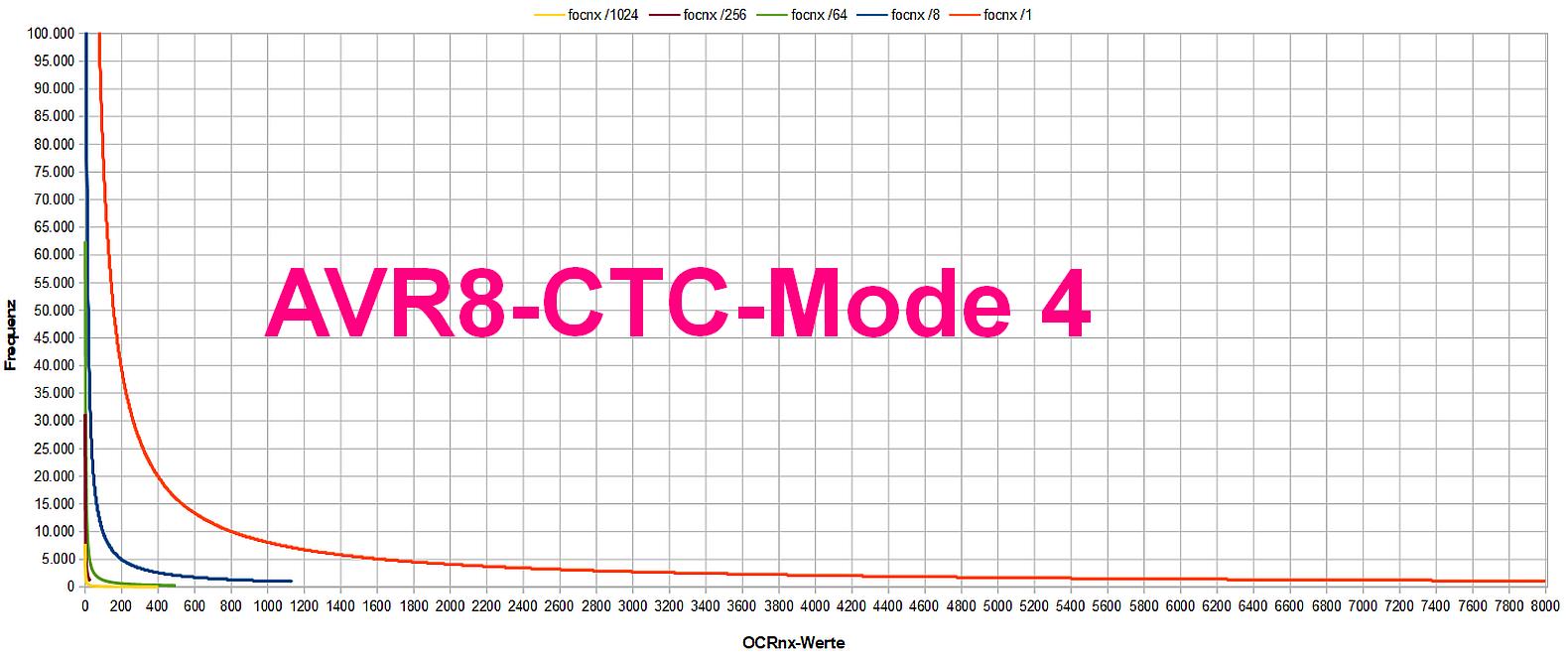
CTC-Mode_4_Kurven.jpg
120 KB -

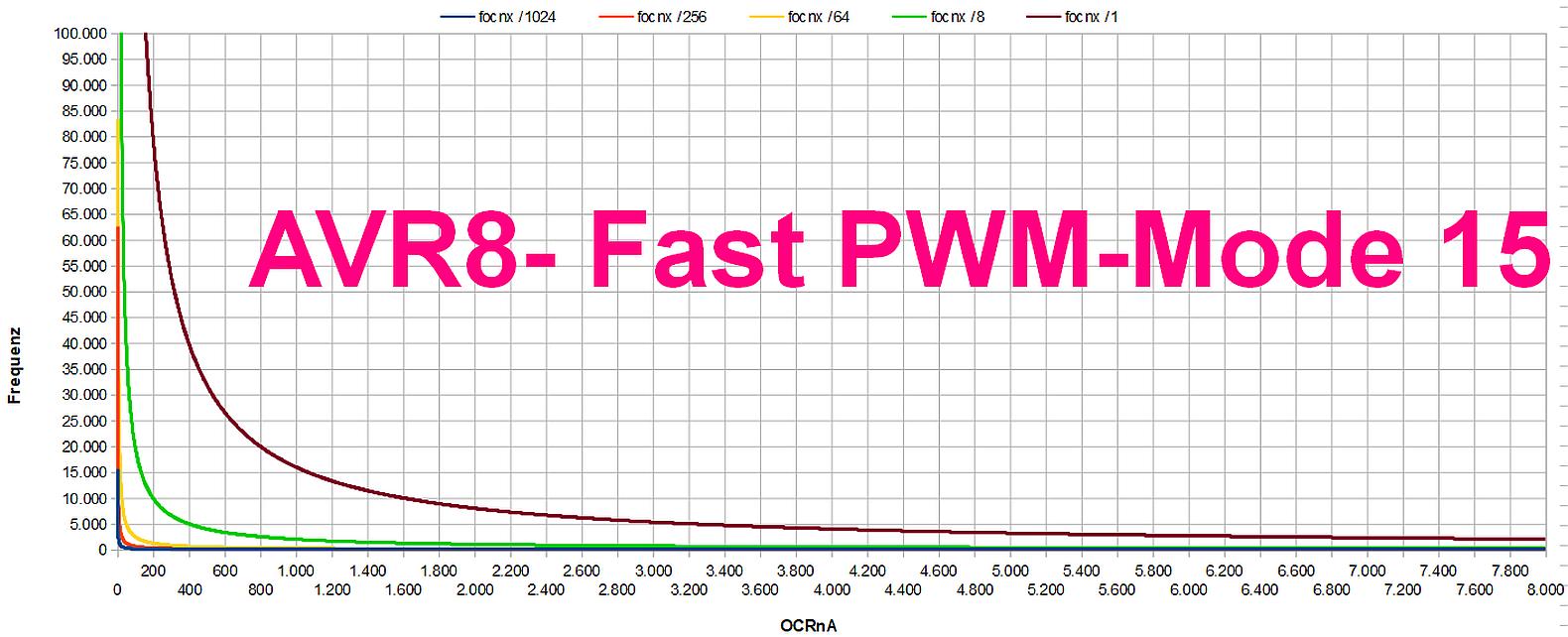
FPWM-Mode_15_Kurven.jpg
130 KB
{kind=link}
{kind=link}
{kind=link}
Es ist ja sinnvoll einen Schrittmotor per Rampe hoch,- und runter zu fahren. Ich habe mal beim AVR8 die Timer-Modes 4 und 15 graphisch aufgenommen. Diese ergeben ja praktisch solch eine Rampe. Der Teiler durch 1, scheint mir am besten geeignet, da er die 100kHz die der TB67S109 maximal kann, am "weichesten" anfährt. Was meint ihr, sollte ich den CTC-Mode 4 oder den FastPWM-Mode 15 verwenden oder evtl. einen anderen Timer-Mode ? Bernd_Stein
Was hat das jetzt nach 5 Jahren mit synchron winkenden Katzen zu tun?
Schon mal die Überschrift gelesen : Fragen zu schrittmotor Treiber Bernd_Stein
Und deshalb jetzt alles in einen Thread mit schlechtem Titel abladen?
Ulrich W. schrieb: > Diese mikro schrittmotoren > habe ich auch schon in china bestellt und bekommen. Zeig mal den Link
Bernd S. schrieb: > Es ist ja sinnvoll einen Schrittmotor per Rampe hoch,- und runter zu > fahren. Eine für den Hochlauf oder das Abbremsen von Schrittmotoren geeignete Rampe zeichnet sich durch konstante Beschleunigung aus. In der Application Note AVR446 "Linear speed control of stepper motor" von Atmel wird beschrieben, wie dafür die Frequenz bzw. der Abstand zweier Schritte in Abhängigkeit von der Zeit aussehen muss. https://ww1.microchip.com/downloads/en/Appnotes/doc8017.pdf Vergleich das einfach mit den Kurven, die du ausgerechnet hast. Wenn du es besonders schön machen willst, baust du am Anfang und Ende der Rampe noch einen Bereich für die Anpassung der Beschleunigung ein (Verringerung des Rucks). Das reduziert die Anregung von Schwingungen in deinem System.
Hier mal ein Video wo man die schrecklichen Resonazen hören kann. Sicherlich spielt auch der Aufbau eine Rolle, es gibt aber auch ruhige Passagen. Ich weiß leider nicht mehr, ob ich die CTC-Mode 4 oder FPWM-Mode 15 gefahren bin. Auf jeden Fall mit 16MHz CPU-Takt der durch 8 geteilt wird und Frequenzen von 100Hz bis 66,667kHz und zurück. Also OCR3A-Werte von 19.900 bis 29 und zurück, in einer Schritten pro OCR3A-ISR-Aufruf. Der Treiber ist auf 6400 Schritte pro Umdrehung bzw. Microstepping 32 eingestellt. Rainer W. schrieb: > In der Application Note AVR446 "Linear speed control of stepper motor" > von Atmel wird beschrieben, wie dafür die Frequenz bzw. der Abstand > zweier Schritte in Abhängigkeit von der Zeit aussehen muss. > Sorry, das ist mir zu hoch. Bernd_Stein
Bernd S. schrieb: > Sorry, das ist mir zu hoch. 71 MegaByte für ein lumpiges Video? Man sollte noch in die Forumssoftware einen Hinweis aufnehmen und das ROT blinken lassen: "Vor dem Posten bitte Gehirn einschalten!"
Helmut -. schrieb: > 71 MegaByte für ein lumpiges Video? > Ist schon von AVI ( 435MB ) auf MP4 konvertiert ! Ich habe ja auch nur Informartionen zur Verfügung gestellt, die ich bei meinen Versuchen vorgefunden habe. Wenn du damit nichts anfangen kannst, ist ja auch nicht schlimm. Deine schlechte Laune kannst du an deiner Familie auslassen, die kann dich evtl. trösten. Für den Rest kann ich nur auf Punkt 5 der fünf universellen Forumsregeln verweisen : 1. Threadüberschrift lesen 2. Evtl. Datum beachten 3. Posting verstehen 4. Falls nicht 3., dann nachfragen oder Klappe halten. 5. Auf die Fragen eingehen und / oder Alternativen bzw. Verbesserungen nennen. Die Punkte kann man an einer Hand abzählen und deshalb evtl. gut merken, wenn nicht dann nur Punkt 3 und Punkt 4 merken. Bernd_Stein
Moin, Deine Motorgeräusche hören sich eher nach einem mechanischen Schwingen an. Vielleicht helfen andere Einstellungen des Motortreibers z.B. 1/8 Schritt und weniger Strom. Kann man ja schnell ausprobieren. Du hast mal geschrieben, das Du lieber von „Profis“ beraten werden möchtest. Das bin ich nicht, aber mein Treiber für einen XY- Tisch ist zum Testen der Geschwindigkeit und der Rampen sicherlich geeignet. Auch mit nur einem Motor. Beitrag "Re: Zeigt her eure Kunstwerke (2021)" Der ist nicht aufgeräumt und die BMP Wiedergabe ist nicht fertig. Wenn Dich das interessiert kann ich Dir die ASM (88K) und die Hex (21K)Datei gerne schicken. Gruß Carsten
Bernd S. schrieb: > Die Punkte kann man an einer Hand abzählen und deshalb evtl. gut merken Lothar M. schrieb: > Beginne für eine VÖLLIG NEUE Frage einen NEUEN Thread! Das wurde dir > schon einige Male gesagt, warum beachtest du es nicht? Warum kannst du dir dann diesen einfachen Punkt nicht merken? Da verliert man sofort die Lust dir sinnvoll zu antworten.
Carsten-Peter C. schrieb: > Deine Motorgeräusche hören sich eher nach einem mechanischen Schwingen > an. > Bin noch immer am Testen und habe jetzt den FPWM-Mode 15 ohne Teiler in Betrieb mit 6400 Mikroschritten pro Umdrehung, also mit 32 Mikrosteps für 1,8°. Versuche gerade die hierbei mögliche, höchste START / STOPP Frequenz zu ermittlen, aber mein Programm hat einen heftigen Wurm. Die Geräuschkulisse ist schon angenehmer. Ich fahre diese Kurve mit OCR3A-Werten von 5799 bis 799 und umgekehrt, in einer Schritten pro OC3A-ISR aufruf, was einer Taktfrequenz von 2,759kHz bis 20kHz bei 16MHz CPU-Takt entspricht. Eigentlich sollen die gelben Markierungen für ca. 1,5 Sekunden immer wieder aufeinanderzeigen, aber im Code ist der Wurm. Die Kamera kann nur mit 720 Auflösung und 60fps aufnehmen und der Ton ist nicht synchron. Es ist eine QUMOX SJ4000. In deinem Video meine ich gesehen zu haben, dass du auch diesen Fake TB6600-Treiber verwendest. Mit welcher höchsten Frequenz taktes du den, bei welcher Schrittauflösung ? Dort habe ich den Fehlerhaften Code angehangen : Beitrag "Programmierung von AVR8-Mikrocontrollern in C : Programmfehler mit OC3A-ISR" Bernd_Stein
Hallo, mein Lenze Motor läuft am ruhigsten mit 1/8 Mikroschritt am Chinatreiber. Wie schnell, kann ich nicht sagen. Das Problem ist eher der langsamere der beiden Motore. Der muss z.B. zwei Schritte machen, einen Schritt aussetzen usw. Aber durch die Mikroschritte tritt das Problem praktisch nicht mehr auf. Nur einen Motor anzusteuern ist da einfacher. Wie in Hterm.png zu sehen ist, lässt sich mit .g und .f gefolgt vom Wert das Optimum schnell ausprobieren. Für meine Schaltung macht es keinen Sinn, den TB6600 mit PWM zu betreiben. Ein Timer setzt in der ISR die gewünschten Ausgänge. Du kannst in der ISR einen Zähler bedienen, der bei einem bestimmten Wert etwas macht. Das ist viel flexibler. Gruß Carsten
Grbl ist auch eine bewährte Software die man erstmal zum Testen nehmen kann.
Also mit 32 Microstepping erreiche ich im FastPWM-Mode 15, bei 16MHz CPU-Takt ohne Vorteilung, eine Taktrate von 58,824kHz, was einem OCRnx-Wert von 271 entspricht. Das sind 9,191 U/s bzw. 551 U/min. Gemessen habe ich 448 U/min. Ich dachte wenn ich mit dem Programm im Anhang keine Schrittverluste erleide hätte ich die START / STOPP Freqeunz von meinem Aufbau herausgefunden. Aber als ich SM_SCHRITTANZAHL so hoch gesetzt habe, dass der SM praktisch immer mit SM_SPEED_MAX ( 271 ) läuft. Drehte er durch. Erst ein OCRnx-Wert von 328, was 48,632kHz entspricht und somit 456 U/min hatte ich einen zuverlässigen START / STOP Betrieb. Um noch höhere Geschwindigkeiten zu erreichen ist dann eine Rampe nötig. Leider konnte ich nicht einfach den Ordner hochladen, deshalb die einzelnen Dateien. Bei der ...Alles Datei sind alle Header-Dateien bereits eingebunden. Bernd_Stein
Bernd S. schrieb: > Leider konnte ich nicht einfach den Ordner hochladen Du könntest deine Dateien in einen Zip-File packen und den hochladen. > Um noch höhere Geschwindigkeiten zu erreichen ist dann eine Rampe nötig. Für ernst zu nehmende Anwendungen ist das in fast allen Fällen grundsätzlich anzuraten.
Bernd S. schrieb: > Um noch höhere Geschwindigkeiten zu erreichen ist dann eine Rampe nötig. für diese Erkenntnis ein gekaperter Thread und 5 Jahre probieren nötig? Respekt.
Das ist doch eine schöne Rampe. Nur weiß ich nicht mehr genau was ich da mal gemacht habe, denke CTC-Mode 4 mit Pin-Toggle, aber welcher Vorteiler kann ich nicht sagen. Bernd_Stein
Hallo, Ich habe mir zuvor einen Schrittmotortreiber gekauft, der für mich sehr günstig war. Ich weiß nicht, welche Preisklasse an Antrieben Sie bevorzugen, schauen Sie einfach selbst:https://www.oyostepper.de/goods-121-ST-V2-5-Achsen-CNC-Breakout-Board-Schnittstelle-Schnittstelle-Mach3-CNC-Fr%C3%A4ser-Kit.html Es gibt viele Laufwerke in unterschiedlichen Preisklassen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.