Ich habe mir das Projekt auch vorgenommen und Linearführungen von Igus bestellt. Den Vorschub in Zeilenrichtung will ich wie beim Tintenpisser mit DC Motor und 150 LPI Encoder aufbauen. Ich denke beim Drucker wird das gemacht um Vibrationsfreien Lauf zu bekommen. Die andere Richtung mit Stepper und Riemenantrieb. Was lässt sich noch mit dem (schwachen) UV Lasern? Habt ihr schon Mylarfolie für Stencils probiert?
Hallo an alle, @Andreas, tolle Arbeit! Deinen Drucker konnten wir ja schon bei Youtube bewundern. Ich habe das zumindest gemacht! Ich hatte das Video für einen Fake gehalten. Wir hatten diskutiert, warum der Photolack einen Farbumschlag nach weiss bei dir hat. Was verwendest du denn für ein Basismaterial. Ich habe Bungard und da kann ich das nicht reproduzieren. Oder liegt das tatsächlich nur noch an der Wellenlänge vom Laser? Ich verwende 445nm und du 405nm. Es wäre schön, wenn wir und da noch ein bisschen unterhalten können! Und dein Fokus interessiert mich auch noch. Du hast geschrieben, dass du in den Brennpunkt gehst. Ich verstehe noch nicht so ganz was du da machst. Könntest du das nochmal genauer beschreiben? Vielleicht mit einer kleinen Zeichnung? Mein Drucker geht auch langsam weiter. Die Konstruktion für den Schlitten ist fertig. Ich denke ich komme diese oder nächste Woche dazu die Teile zu fräsen. Die Linearencoder habe ich auch schon am Laufen. Die Schrittmotoren und die Riemen sind auch da. Es hängt im Moment eigentlich nur an der Zeit. Die ist nicht so üppig, aber langsam geht es weiter. Wenn ich einen Stand habe, wo man Fotos machen kann, dann stelle ich sie hier ein. Grüße, Jens
Hi, >wir und da noch ein bisschen unterhalten können! Na klar, @Richard, also, die Itemprofile 60x30 sind Reste aus meiner Firma, gibst aber auch in der Bucht oder Reichelt usw... Es ist nur eine Spindel verbaut, die ist ne einfache Metrische Gewindestange M10 aus 1.4301 (Baumarkt), Mutter ist aus PA6 selbstgebaut.Sie ist fast spielfrei, da ich aber immer in eine Richtung fahre ist das egal,das Umkehrspiel wird per Software verrechnet. Für diese Achse hab den alten Epson Stepper an der Trinamic TMC 246 Endstufe.(Der Motor ist recht schwach, will den noch mal austauschen), wenn ich mich nicht Irre hat der 200 Steps/U betreibe den mit 1/32stel Mikrostepping 15V @1A. (müsste da im AVR programm noch mal nachschauen) Der andere Motor ist jetzt ein Minebea 200 Steps/U 3A und hängt an eine Leadshine DM556 mit 8000 Steps /per U an 24 V,was jetzt aber relativ egal ist, da ich einen (China) Linearmaßstab in der Achse habe s.Bild Dieser Motor treibt über einen Zahnriemen HTD 3 9mm Breite, den Laserschlitten an. Linearführungsschiene sind aus der Bucht 15mm breite. 2 Wagen für Y ein Wagen für X (Laserschlitten). Steuerung per ATmega 128 mit 32K Sram @24 Mhz, FTDI 232 USB to serial @1Mbaud. @Jens >Ich habe Bungard und da kann ich das nicht reproduzieren. Benutze auch Bungard Platinen. Ich habe jetzt auch eine 445nm 1W eingebaut und damit geht es auch. Mein Abstand Laserlinse zur Platine beträgt ca 50mm und fokussiere den Laser auf 0.02mm Breite. Wie schon mal gesagt, muss der Abstand sehr genau eingehalten werden. Die Einstellung mit der Linse ist sehr schwierig, deshalb habe ich noch eine kleine Z-Achse für die Diode mit Einstellschraube gebaut.D.h. ich kann den Abstand des Lasers über eine Stellschraube variieren um den Punkt genau zu fokussieren. Die Laserdiode betreibe ich mit nur ca 300mA, die Platine wird genauso sichtbar belichtet wie mit 405nm und läst sich auch entwickeln. Mit mehr Leistung brennt es dann wirklich weg. Bei einer Versuchsplatine die ich mehrfach mit mehr Leistung belichtet hatte, konnte man schon auf dem Kupfer Spuren des Laserstrahl sehen. Als Layoutsoftware benutze ich Eagel mit PCB-Gcode (ältere Version). Damit bekomme ich dann auch gleich die passenden Bohrkoordinaten für meine CNC. Der Fräsgcode wird dann über mein Programm (in C#) umgerechnet in Bildpunkte für den Laserprinter und per USB an den Laserprinter zeilenweise gesendet. Mein Ziel war es, 2 Seitig mit Viabohrungen 0.3mm (auf der CNC) mit 5mil clearance zu fertigen. Das habe ich erreicht, brauchte aber den Glasmaßstab dafür weil die Abweichungen vom Zahnriemen (nicht reproduzierbar) zu groß waren. Beim Bohren kam es dann mal vor, das ich ein Lötauge nicht richtig getroffen habe. Ich dachte erst der Motor ist nicht genau genug, habe dann einen Drehgeber an die Welle montiert, das hat auch nicht geholfen, erst mit dem Glasmaßstab der die wirklich Istposition des Schlitten erfasst war das Ergebniss zufriedenstellend. Ich will nicht verschweigen das der Printer schon ne Menge an Geld (und Zeit) verschlungen hat. Viel teuere Hardware.... Ich möchte ihn aber auch noch verbessern. Besonders die Software ist noch eine große Baustelle (bin da nicht so der Profi), und die zweite Laserdiode ist noch nicht vom Tisch. Für 100x80mm in vollen Auflösung brauch ich ca 25min für 1 Seite. Recht lang... 2 Dioden = halbe Zeit brauchbar, 4= ... Na ja eigendlich reicht es ja schon aus, bei meinen 3 Platinen die ich mal mache.... und Isolationsfräsen mach ich ja auch, ganz ohne Chemie :-) So ich hoffe ich habe mal ca 10 von 1000 Fragen beantwortet :-) Viele Grüße Andreas
Hallo Andreas, danke für die Infos! Was ist denn das für ein Glasmaßstab? hast du da eine Typenbezeichnung für mich oder einen Link? Ich würde den gerne vergleichen. Ich verwende bei allen meinen Achsen magnetische Linearencoder von ams. Grüße, Jens
Angehängte Dateien:
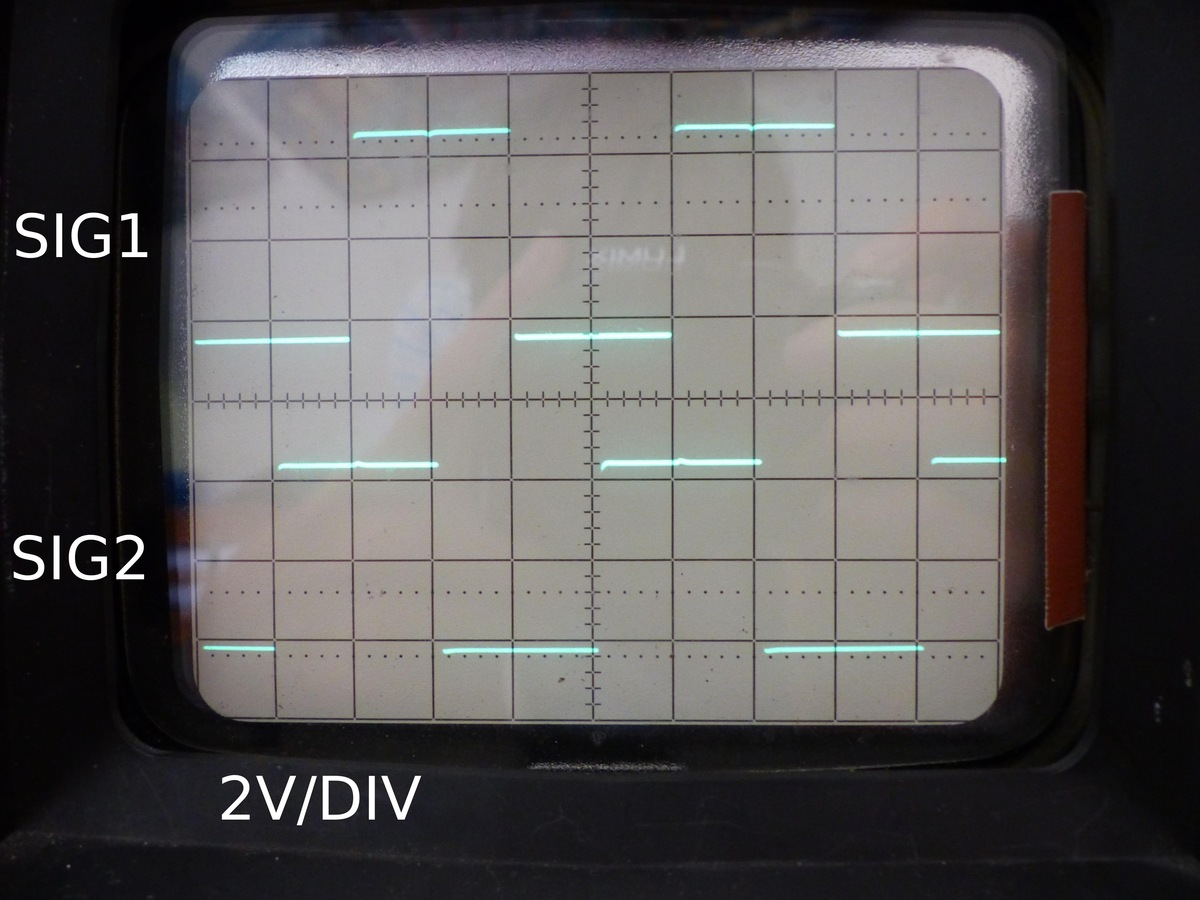
Hallo zusammen, ich bin wieder da :-) Habe mein Problem mit dem "Gezackere" gelöst - es war die Verstärker-Schaltung für den Synch-Opto. Habe diese jetzt durch einen LM324 mit Kondensator und 2 Widerständen ersetzt und bin mit dem Ergebnis zufrieden. Muss noch etwas am Fokus arbeiten - aber das kommt später. Aus diesem Grund ist die belichtet Fläche (Abstand zwischen den Leiterbahnen) etwas breiter. Hat nichts mit dem Timing zu tun. Bei dieser Gelegenheit ist meine Polygonmotor-Steuerung abgeraucht :-( Auch die habe ich - jetzt etwas wartungsfreundlicher - auf einen logic-level-FET ohne weitere Beschaltung (nur ein Angst-Widerstand zum AVR-Pin) umgestellt. Funktioniert prima :-) Stelle mal wieder ein Mega-Bild ein (rechtes oberes Viertel der Platine). Habe den Platinenabschnitt wegen des Kontrastes mit meiner "immer-noch-da-HCL-Mischung" angeätzt. Am Samstag werde ich wahrscheinlich mal einen kompletten Ätzversuch mit Natriumpersulfat wagen. Schlimmstenfalls berichte ich nicht darüber :-\ Wer es noch nicht weiß - ich bin eher durch Zufall auf Richards Ätzergebnis gestoßen: Beitrag "Re: Spruehaetzanlage" Und hier schreibt er, was er so vorhat Beitrag "Re: Platinen Semi-Professionell herstellen. Bohren, Fräsen, Ätzen Womit?" Bin gespannt, wie es da weitergeht. Den Rest lese ich interessiert mit und warte mal, wie sich das entwickelt. In diese Richtung werde ich jedenfalls für die Belichtung nicht gehen. Gruß Dieter
Nachtrag: Habe mal zum Spaß die 5 mil Spirale auf 2 mil verkleinert und belichtet. Wie erwartet, aufgrund des "sub-optimalen" Fokus, ziemlich daneben. Da habe ich noch eine Baustelle ...
Hallo, Nun, da hat sich jemand aufgeregt. Ich dachte ich poste hier nichts mehr, weils nicht um Laserbelichter geht. Die 4 mil Platine war für mich ehrlich gesagt eine Enttäuschung. Der Epson schafft nicht mehr. Ja, ich versuche das Know How der Firma öffentlich zugänglich zu machen (oder so günstig es geht zu vertreiben) und werde am Ende nur noch beschimpft. Jetzt werde ich eine 1 mil Spirale (Film) bestellen. Dieter, warum verkleinerst bzw. vergrößerst du die ganze Zeit? Warum nimmst du nicht die 2 mil Spirale, statt zu verkleinern? Dieter F. schrieb: > Den Rest lese ich interessiert mit und warte mal, wie sich das > entwickelt. In diese Richtung werde ich jedenfalls für die Belichtung > nicht gehen. Nun, ich werde dort nichts mehr posten. Bilder vielleicht... Was genau meinst du? Beziehst du dich aufs "Streiten" oder aufs Open Hardware? Ich habe dein 1 Juni Video gesehen. Hut ab. Das ist sehr schnell gewesen. War das RealTime? LG, Richard
Angehängte Dateien:
-

IMG_1867.JPG
2,4 MB
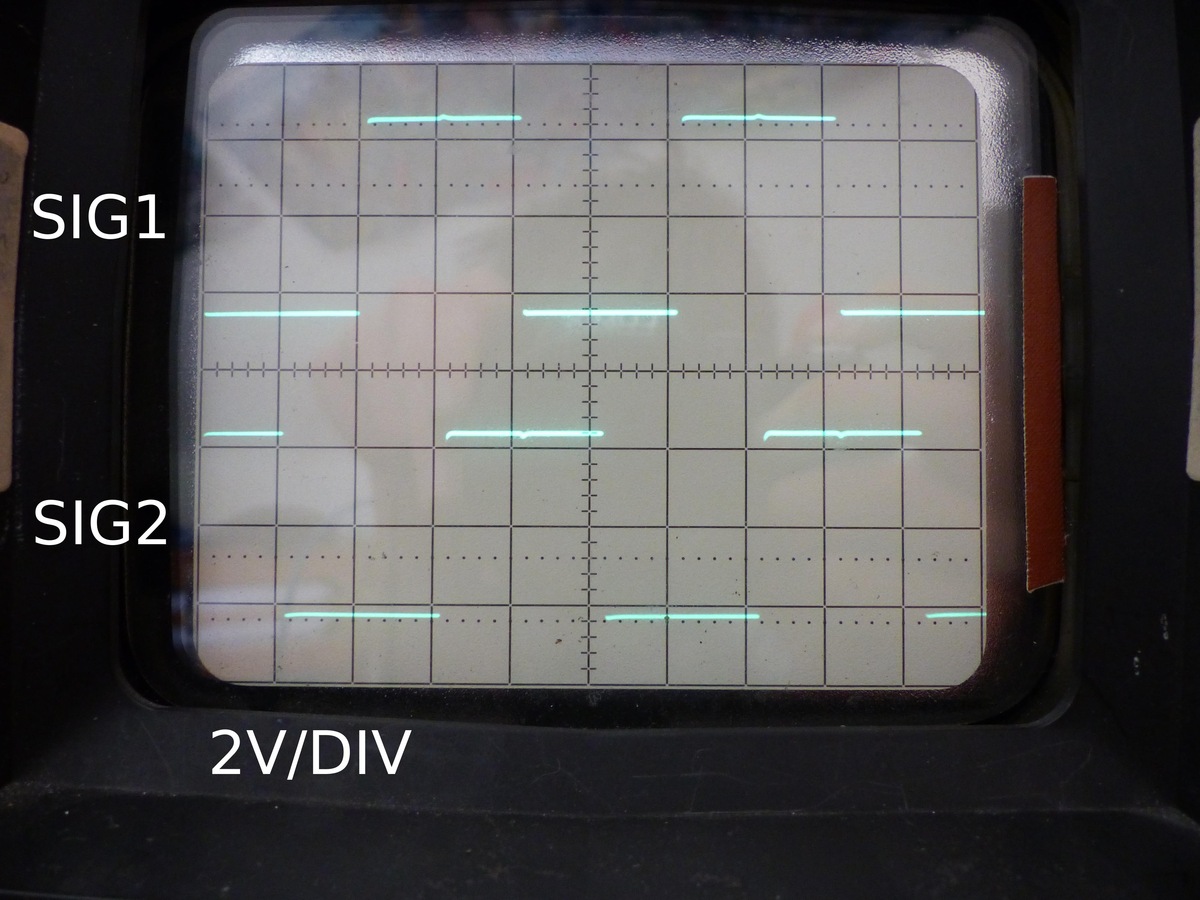
Hallo Richard, Du stehst ja ganz schön unter Beschuss ... 4 mil versuche ich morgen oder Sonntag mal incl. Ätzen. Habe gestern Abend nochmal mit 2 mil gespielt um den Fokus besser einzustellen - Ergebnis anbei. Da ist die Grenze des reproduzierbar machbaren (bezogen auf die Spirale) für mich überschritten. Habe übrigens fotografiert, da mein Scanner dabei recht unscharf wirkt ... Der Synch-Opto liefert keine ausreichende Genauigkeit für derartig schnelle Schaltvorgänge. 4 mil scheinen mir noch halbwegs machbar - mal schauen. Mit 1 mil wirst Du Dir keinen Gefallen tun. Auch mit einer starken high-current UV-Leuchtdiode als Punktlichtquelle (habe ich mir mal besorgt und werde das bei Gelegenheit auch mal ausprobieren) wird das Ätzergebnis bei 35 µm Kupfer nicht toll werden. Bin aber gespannt, ob ihr das hinbekommt (und wie es dann aussieht - aber bitte auch HiRes-Bilder einstellen :-) ) Warum ich verkleinere habe ich eigentlich schon geschrieben - aber gerne nochmal: Wenn ich über ca. 760 Belichtungswechsel pro Belichtungszeile komme (und das ist bei den Spiralen < 5 mil der Fall), dann mus ich wegen Speichermangel auf einen anderen ATXMega umsteigen. Will ich aber nicht, deshalb verkleinere ich einfach die 5 mil Spirale, da habe ich genau 760 Belichtungswechsel pro Zeile im Maximum. Richard schrieb: > Bilder vielleicht... Die (Bilder von den Geräten) würden mich wirklich interessieren. Brauchst ja nicht allzusehr ins Detail gehen, wenn Du wegen Nachahmern Angst hast. Mitlesen werde ich hier bezüglich der "Plotter-Lösung" (mir fällt kein besserer Name ein ...). Die anderen Threads lese ich eigentlich nur mit, um von Deiner Lösung ein besseres Bild zu bekommen :-) Richard schrieb: > Ich habe dein 1 Juni Video gesehen. > Hut ab. Das ist sehr schnell gewesen. > War das RealTime? Nö, reine Demo (habe ich auch geschrieben). Aktuell belichte ich (noch mit low power) mit ca. 1 Min. 30 Sekunden pro cm in Vorschubrichtung. D.h. eine Europakarte belichte ich in ca. 15 Minuten. Gruß Dieter
Hallo an alle, @Dieter, Hut ab kann ich nur sagen! Ich hätte nicht gedacht, dass man mit dem System so feine Strukturen hin bekommt! Egal ob man das Ätzen kann oder nicht. Fest steht, dass der Drucker nicht das begrenzende Gerät ist. Noch ein Tip für deine Sync. Du hast geschrieben, dass du den LM324 verwendest. Das ist ein OP, der nicht besonders schnell schaltet. Die Bandbreite liegt bei dem bei etwa 1,1MHz. Wenn du das nächst mal Bauteile orderst, dann besorge dir mal eine LM311. Der kostet auch kein Geld, ist aber ein richtiger Komparator. Der schaltet viel schneller und damit auch präziser. Wenn das nicht hilft, dann habe ich noch einen TLV3501 für dich. Da könnte ich dir einen schicken. Den habe ich bei TI mal als Sample bekommen. Das ist ein Komparator mit max 4,5ns Schaltzeit. Damit sollte es auf jeden Fall gehen. Da könnten auch die feinsten Strukturen gehen. Da wird dann nichts mehr jittern. Ich weiss aber nicht, ob du mit der Betriebsspannung von dem Teil auskommst. @Richard Wo bist du denn beschimpft worden? Hier in diesem Thread? Ich hoffe nicht. Oder sprecht ihr da von etwas anderem? Ich bin da nicht ganz mit gekommen. Ich bin auch wieder ein Stückchen weiter gekommen. Ich habe heute den ersten Teil von meinem neune Drucker gefräst. Die Montage fehlt noch und dauert auch sicher noch ein paar Tage. Bilder gibt es dann wenn es nach was aussieht. Im Moment habe ich leider nicht so viel Zeit. @Andreas Der Linearmaßstab ist ja recht teuer. Das übersteigt mein Budget. Ich verwende Sensoren auf Hall-Effekt-Basis von AMS. Die sollen auch eine Auflösung von 2µm liefern. Ich habe mich erstmal darauf verlassen und werde sehen, ob das ausreicht. Die Sensoren sind wesentlich billiger. Wenn man den Magnetstreifen kauft, dann kostet der etwa 8€ und das IC selber 5€. Das kann ich mir leisten. Ich werde berichten, ob das auch ausreicht. Grüße, Jens
Hallo, @Jens - danke für die Blumen - das Ergebnis ist aber nicht optimal und damit nicht nutzbar. 2 mil Bahnen mit 2 mil Abstand werde ich nicht zuverlässig / reproduzierbar erreichen. Es gibt dafür mehrere Gründe: 1. Synch-Opto - hier müsste man deutlich verbessern. Keine Ahnung, ob ich da nochmal was tun werde ... 2. OpV - ich werde Deinen Rat mal berücksichtigen und ausprobieren. Spielt aus meiner Sicht aber keine Rolle, da ich mit 333,33.. Hz arbeite. 3. Qualität des Fotolacks. Hier muss ich Richard Recht geben - bei fast jedem meiner Belichtungsversuche habe ich irgendeine (oder mehrere) Fehlstelle(n) (Bläschen im Lack oder "Mikroloch") in der beschichteten Platine (von Bungard). 4. Ich habe keinen Rein(st)raum. Irgendwelche Staubpartikelchen schwirren immer herum und stören die Belichtung Richard ist in einem der Links (ein paar Beiträge zurück ...) ordentlich beschossen worden. Ist ja hier nichts Neues ... . Jens schrieb: > Ich habe heute den > ersten Teil von meinem neune Drucker gefräst Würde ich nie hinbekommen - ich habe 2 linke Hände. Wenn ich etwas mechanisches brauche frage ich meinen Bruder :-). Bin gespannt auf das Ergebnis. Ja, den Linearmaßstab habe ich mir auch angeschaut. Heftig, der Preis - und gering die Meßstrecke. Gibt es für größere Strecken nicht wesentlich teurer - aber immer noch heftig teuer. Da hätte ich auch Skrupel - aber wenn ich all die getöteten LD's so vorbeiziehen lasse ... Ein Hobby muss der Mensch ja haben! Gruß Dieter
Moin, damit hier kein falscher Eindruck entsteht - die Bläschen oder Mikrolöcher im Lack sind nur unter dem Mikroskop zu sehen und bei "normalen" Leiterbahnen etc. aus meiner Sicht vollkommen unkritisch. Ich kann auch nicht von Häufigkeit sprechen - nur finde ich immer wieder mal welche. Mir sind noch weitere, einschränkende Parameter eingefallen: 1. Auflösungsvermögen des Fotolacks (lt. Bungard "besser als 30 µm") 2. Mechanische Haftung des Fotolacks auf dem Kupfer bei feinsten Strukturen Hier habe ich den Eindruck, dass bei sehr feinen Strukturen auch die mechanische Haftung "sehr empfindlich" ist. Ich bin gespannt auf das Ätz-Ergebnis des HiRes-Ätzgerätes (vermute mal, eine Sprüh-Ätzanlage) bei 1 mil Bahnen. Ggf. sind die dabei auftretenden mechanischen Belastungen zu groß für die Haftfähigkeit des Lacks (reine Vermutung) und der Lack wird einfach teilweise weggespült. Das vermute ich sowieso bei der erwarteten Unterätzung. 3. Mein fliegender Aufbau :-) Ich belichte bei 2 mil mit immerhin 1,6 MHz Lasermodulation (625 ns Ein-/Auszeiten). Den Laser habe ich über relativ lange Leitungen incl. Steckverbinder (!) an der noch nicht optimierten Lasertreiber-Platine angeschlossen. Viel Lochraster ... Prototyp halt ... @Fritz: Vielleicht liest Du ja noch mit. Hast Du Dich mal an solch feinen Strukturen versucht? Wäre mal interessant, wie eine mechanisch und elektrisch/elektronisch solide Lösung damit zurechtkommt. Gruß Dieter
Dieter F. schrieb: > @Fritz: Vielleicht liest Du ja noch mit. Hast Du Dich mal an solch > feinen Strukturen versucht? Wäre mal interessant, wie eine mechanisch > und elektrisch/elektronisch solide Lösung damit zurechtkommt. > > Gruß > Dieter Hallo Dieter, nein bisher habe ich noch keine Rekordversuche unternommen, ich habe nur die Platinen angefertigt die ich auch wirklich brauchte :-) Ich wollte Platinen für Chips mit bis zu 0.4mm pitch anfertigen können. Eigentlich gehts mir nur um Prototypen, richtige Boards lasse ich seit Jahren dann bei einem Fertiger machen. Allerdings ist der erste Entwurf nur höchst selten optimal, an irgend etwas hat man meist nicht gedacht und sei es die Befestigung. Jeder der selbst Platinen entwirft weiß wovon ich Rede.. Dieses Ziel habe ich erreicht und deshalb sind bei mir erst mal keine weiteren Entwicklungen geplant. Der einzige Punkt an dem ich nochmal aktiv werden müsste ist wie bei Dir der Sync Impuls Sensor, der mit Erwärmung der Laserdiode eine Drift von ca 0,2 mm in horizontaler Richtung erzeugt. Der Effekt ist, das die gesamte Zeile nach einigen Minuten, dummerweise wenn man bei der Unterseite der Platine angelangt ist, ein/zwei Zehntel nach Rechts verschoben ist. Ich hab im Moment keine richtige Idee wie ich das beheben könnte,ich verwende nach wie vor den original HP-Sensor. Gruß
Fritz R. schrieb: > Der Effekt ist, das die > gesamte Zeile nach einigen Minuten, dummerweise wenn man bei der > Unterseite der Platine angelangt ist, ein/zwei Zehntel nach Rechts > verschoben ist. Hallo Fritz, das habe ich mit dem "Standby-Laser" in den Griff bekommen. Ich lasse den Laser durchgehend (nicht nur für den Synch-Impuls) knapp oberhalb der Laserschwelle leuchten. Das ist viel zu wenig, um einen Belichtungseffekt zu erzielen, reicht aber aus um die Verschiebung nahezu weg zu bekommen (ist bei mir jedenfalls nicht mehr sichtbar). Auch ich arbeite mit dem Original-Sensor. Überlege aktuell, ob ich eine Lochblende davor setze um die Präzision noch etwas zu erhöhen. Gruß Dieter
Angehängte Dateien:
-

uvs150822-001.jpg
550 KB -

uvs150822-003.jpg
640 KB -

uvs150822-004.jpg
630 KB -

IMG_1905.JPG
2,3 MB
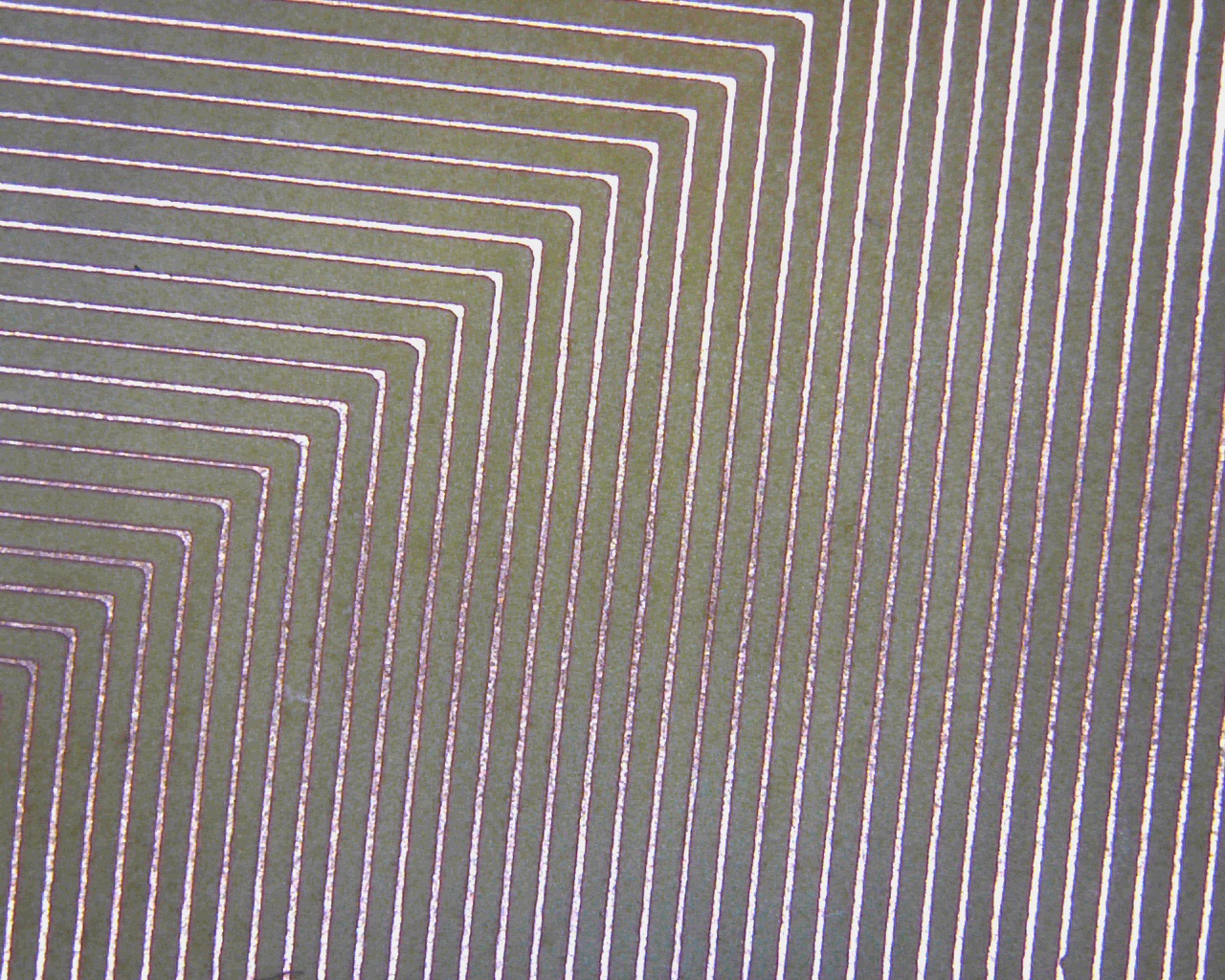
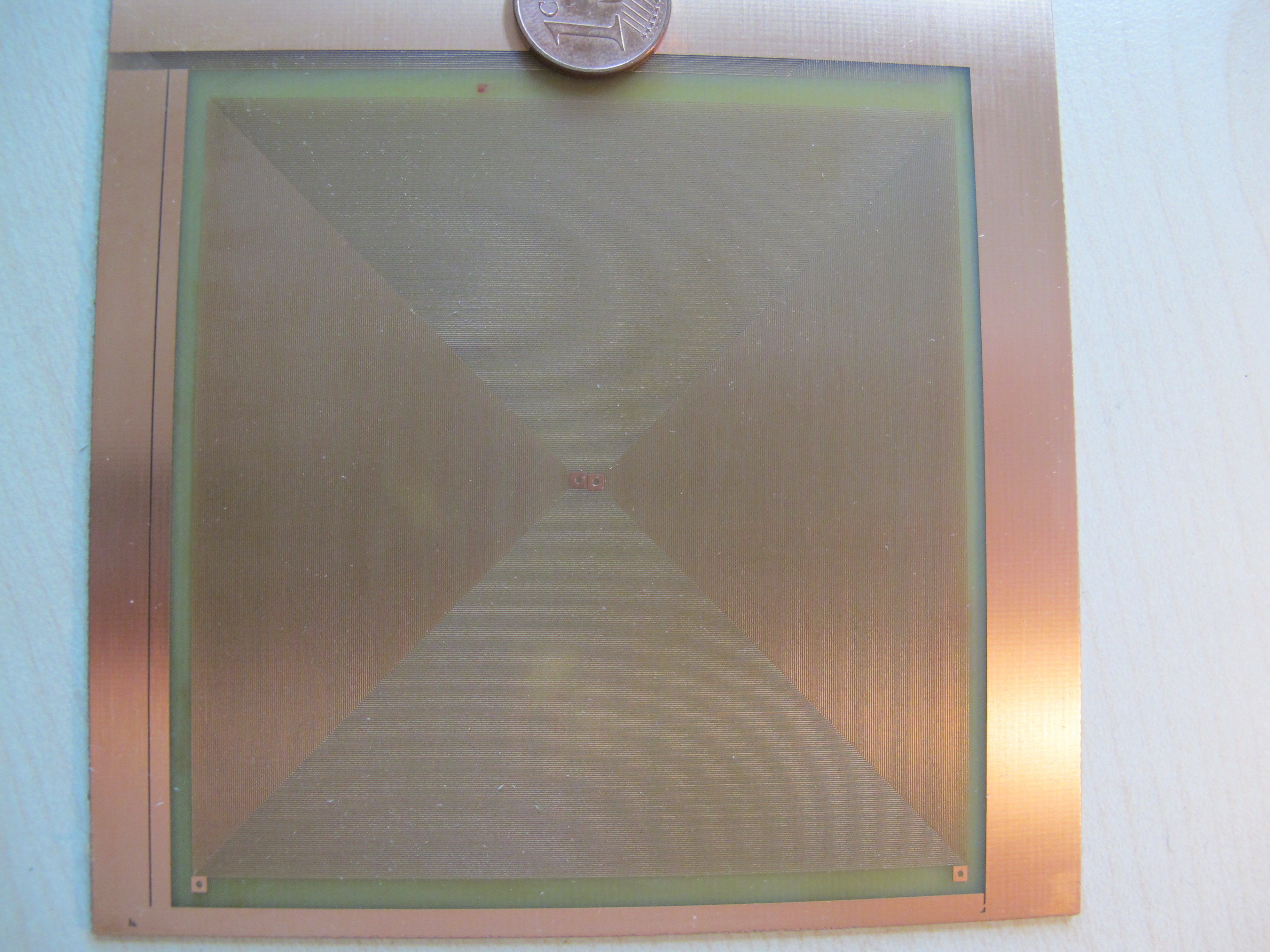
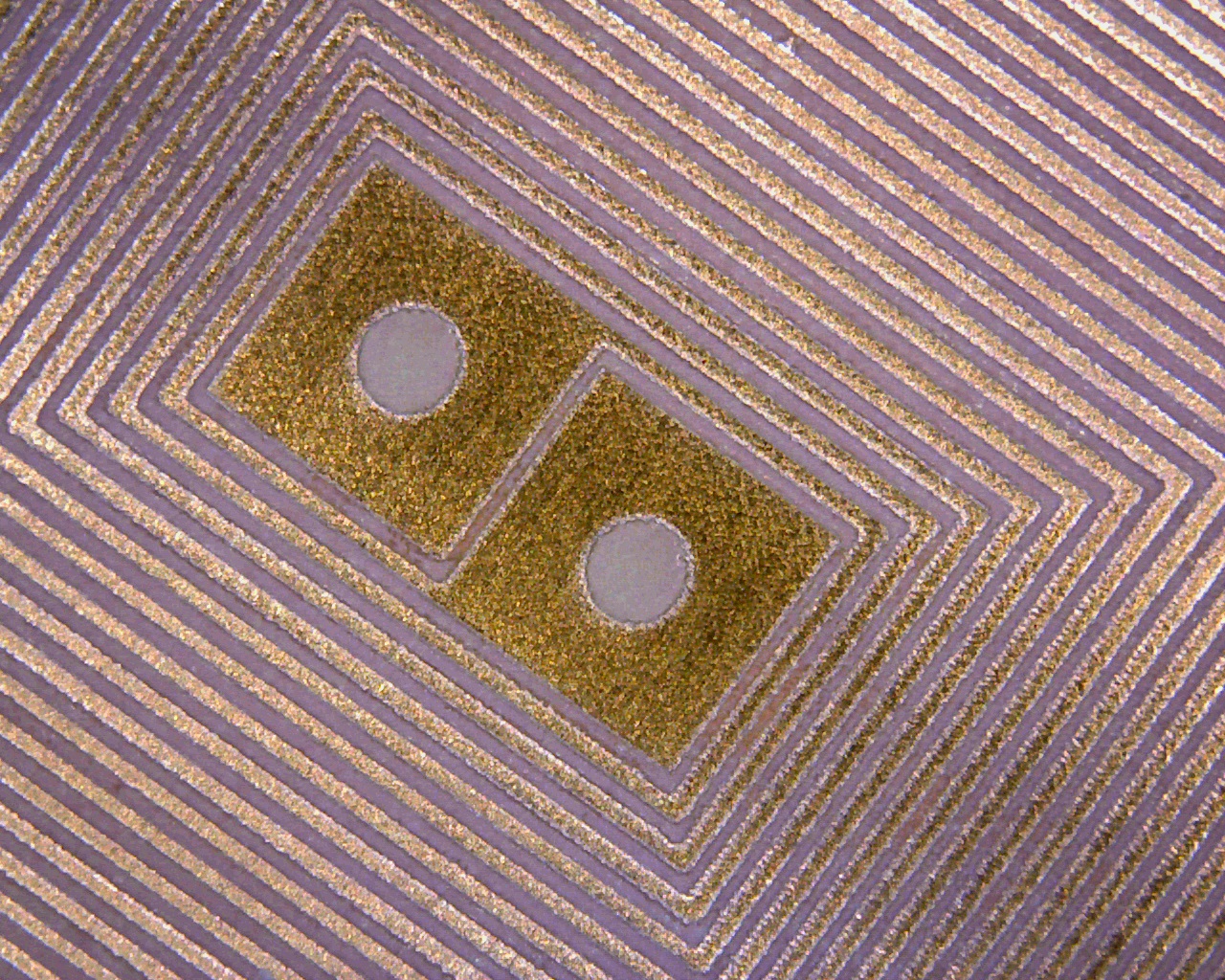
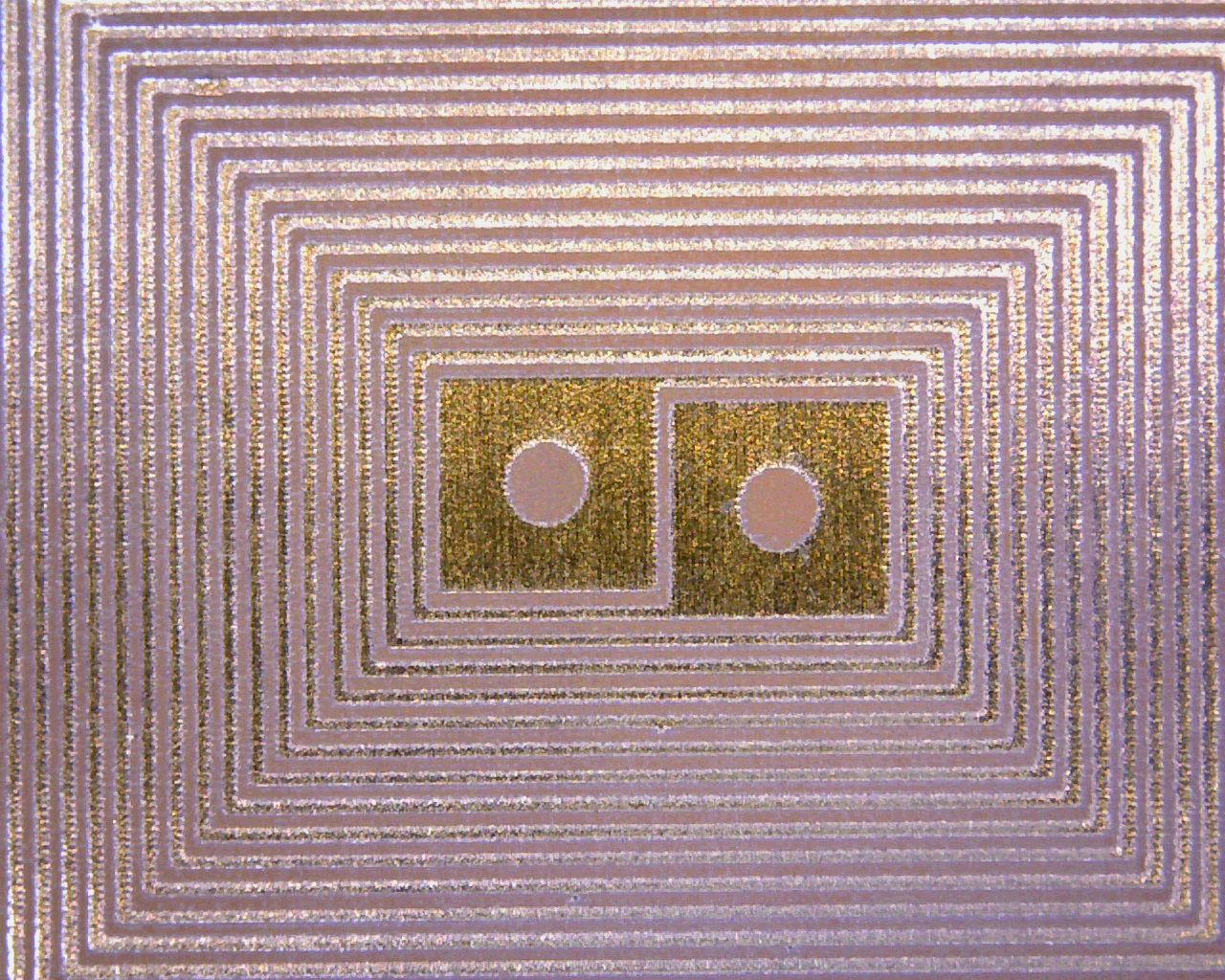
Hallo zusammen, ich bin noch einen Bericht schuldig. Habe die 5 auf 4 mil-reduzierte Version belichtet (das sah wirklich gut aus) und geätzt. Ergebnis anbei. Erstmal ein paar relationslose Detail-Aufnahmen, auf denen man gut erkennt, wie die (zumindest meine) Ätzerei die Bahnen schrumpfen lässt. Dann noch eine Totale - eine Stelle habe ich rot markiert, da ist eine Fehlstelle. Es müssen aber noch mehr sein, da ich keinen Durchgang habe. Versuch beendet - schön, wenn jemand so etwas wirklich schafft - ich bekomme es definitiv nicht (reproduzierbar) hin. Und dafür x Anläufe zu machen habe ich wirklich keine Lust. Schönes Wochenende
Jens schrieb: > Ich verwende Sensoren auf Hall-Effekt-Basis von AMS. > Die sollen auch eine Auflösung von 2µm liefern. > Die Sensoren sind wesentlich billiger. > Wenn man den Magnetstreifen kauft, dann kostet der etwa 8€ und das IC > selber 5€. Klingt interessant, kannte ich noch nicht. Du meinst damit Sensoren wie z.B. diese: http://ams.com/eng/Products/Position-Sensors/Linear-Incremental-Magnetic-Position-Sensors/AS5304 Magnetic Strip: http://ams.com/eng/Products/Position-Sensors/Magnets/AS5000-MS20-150 Die AS5304 AS5306 AS5311 ICs gibts bei HBE/Farnell, Digikey, Mouser aber für die Magnetic Pole Strips hab ich nur bei eBay 2-3 Verkäufer in USA/Canada gefunden. Woher hast du deine bezogen? > Ich werde berichten, ob das auch > ausreicht. würd mich freuen, danke.
Hallo, Genau die meine ich. Ich habe dir gar nicht gekauft. Ich habe die als Sample bezogen direkt über ams. Das wird als Privatperson aber schwer. Ich habe noch eine Firma gefunden, die die Strips vertreibt (http://www.bogen-electronic.de). Da war das Problem, dass die eine Mindestabnahme von (glaube ich )75€ hatten. Für mich alleine zu viel. Aber wenn sich mehrere Leute zusammen tun würden wäre das eine gute Alternative. Ich würde dann auch nochmal welche nehmen. Ich schlage vor, ich teste die Sensoren und berichte von den Erfahrungen. Wenn das gut ist, dann machen wir eine Sammelbestellung. Grüße, Jens
Hallo, @Dieter, Ich glaube die Empfindlichkeit des Lackes wird unterschätzt. Ich habe heute wieder geätzt und versucht die Platine zu zerkratzen. Ist der Gegenstand stumpf, bleibt der Lack definitiv oben. Keine Kratzer. Nichts. Deine neuen Platinen sind schön geworden. Ich frage mich nur, warum die Bahnen so dünn geworden sind? Wenn du das mit NaPS geätzt hast, muss die Platine ~90-120 sec über die "Zeit" im Bad gewesen sein. Ich melde mich wenn ich die Filme habe… LG, Richard
Richard schrieb: > Ist der Gegenstand stumpf, bleibt der Lack definitiv oben. > Keine Kratzer. Nichts Hallo Richard, na da stelle ich heute Abend ein schönes Bild als Gegenbeweis ein :-) Richard schrieb: > Deine neuen Platinen sind schön geworden. > Ich frage mich nur, warum die Bahnen so dünn geworden sind? > Wenn du das mit NaPS geätzt hast, muss die Platine ~90-120 sec über die > "Zeit" im Bad gewesen sein. Nix schön - aber das habe ich mich auch gefragt. Hat die ganze Zeit an mir genagt :-) - und da gestern Abend das Weinfest ins Wasser gefallen ist hab e ich zur Beruhigung meine Standard-Platine (Lasertreiber) belichtet. Da ich meine Ätz-Küvette nicht aufbauen wollte habe ich die alte HCL-Mischsuppe mit einem Schuss HCL und etwas Wasserstoffpeoxid nachgewürzt und die entwickelt Platine drin geätzt. Ergebnis: Prima Ehrgeiz bekommnen und nochmal die 5 auf 4 mil verkleinerte Spirale belichtet, in die Ätzbrühe gelegt ... und nach einiger Zeit versaut. Ich bewege die Platinen immer etwas in der HCL-Suppe (wenn ich die denn nutze), damit die Bläschen sich lösen - schubse die Platine mit einer flachen Kunststoff-Pinzette hin und her. Dabei bin ich abgerutscht und habe einen kleinen Strich über die Platine gezogen. Lack weg, Platine hin. Das Ergebnis ist aber grundsätzlich prima :-) - ca. knapp zur Hälfte geätzt und schön strukturierte und korrekt breite Bahnen und Abstände. Reiche heute Abend ein paar Bilder nach. Problem ist offensichtlich meine Ätzküvette bzw. die Beblubberung. Ich habe ich vor einiger Zeit ein Plastik-Blubberrohr und eine Kolben-Luftpumpe aus China gekauft und jetzt die Beblubberung damit verstärkt (die Reichelt-Membranpumpe hat nur noch ein paar müde Bläschen erzeugt) - scheinbar zu viel. Ich hatte ordentlich Bewegung im Bad. Zu lange habe ich die Platine auch nicht drin gelassen - ich warte halt (leuchte von hinten durch) bis alle Bahnen frei sind. Andreas schrieb: > Das gibt das viele kleine Blasen und viel Bewegung im Bad. Nach meiner aktuellen Erfahrung muss man die Bewegung wohl fein dosieren. Zu viel ist kontra-produktiv. Was mich an Sprüh-Lösungsansätzen auch etwas zweifeln lässt ... Wenn ich nicht so viele Vorbehalte gegenüber der HCL-Suppe hätte würde ich die Küvette jetzt sofort verkaufen. Nun auch noch auf den optimalen Blubber zu achten (und diesen einzustellen) ist mir eigentlich zu blöde. Werde wohl alternativ doch nochmal mit Eisen-III-Chlorid experimentieren. Gruß Dieter
Ich meinte doch nicht solche Kratzer :) Hmm... Das Licht hast du ja schon gesehen. Dann wird nicht gleichmäßig geätzt?
Hallo, ich verstehe das Problem nicht ganz. Die Spirale ist doch prima und wenn es sich um 35-µm-Material handelt, kann es durch das Unterätzen doch auch garnicht besser werden. Wenn von 100 µm 2 x knapp 35 µm weggeätzt werden, bleiben halt nur 30 µm übrig. Wenn es am Blubberer liegen würde, sollten in X- und Y-Richtung Unterschiede feststellbar sein. Mir fallen keine auf, das kann aber auch an mir liegen. Ich vermute schon, dass du da an den Machbarkeitsgrenzen bist und deswegen die professionellen Fertiger sich da nicht gerne dranwagen. Möglicherweise können die CAM-Tools der Profis aber noch eingreifen, z.B. indem alle Bahnen verbreitert belichtet werden, so dass es hinterher stimmt. @ Jens: Die Magnetstreifen interessieren mich auch, bin gespannt auf deine Tests. Grüße, Guido
Guido B. schrieb: > Wenn es am Blubberer liegen würde, sollten in X- und Y-Richtung > Unterschiede feststellbar sein. Mir fallen keine auf, das kann > aber auch an mir liegen. Ich habe jede volle Minute die Platine in der Küvette (natürlich außerhalb) um 90 Grad gedreht :-) Ich denke, die Bewegung des Ätzmittels war zu stark und es hat mit angeätzen Kupfer-Kristallen auch jeweils Teile des Fotolacks mit weggerissen. Nach der Belichtung sah noch alles gut aus ...
Dieter F. schrieb: > Ich denke, die Bewegung des Ätzmittels war zu stark und es hat mit > angeätzen Kupfer-Kristallen auch jeweils Teile des Fotolacks mit > weggerissen. Nach der Belichtung sah noch alles gut aus ... Das halte ich auch ohne zu starke Bewegung für normal. Wenn so geätzt wird:
1 | ________ |
2 | \ / |
3 | \____/ |
steht an den Rändern Fotolack über und reißt dann ab. Meiner Meinung nach ist alles im grünen Bereich.
Angehängte Dateien:
-

uvs150823-003.jpg
770 KB -

uvs150823-004.jpg
640 KB -

uvs150823-005.jpg
650 KB -

uvs150823-008.jpg
730 KB -

uvs150823-009.jpg
580 KB
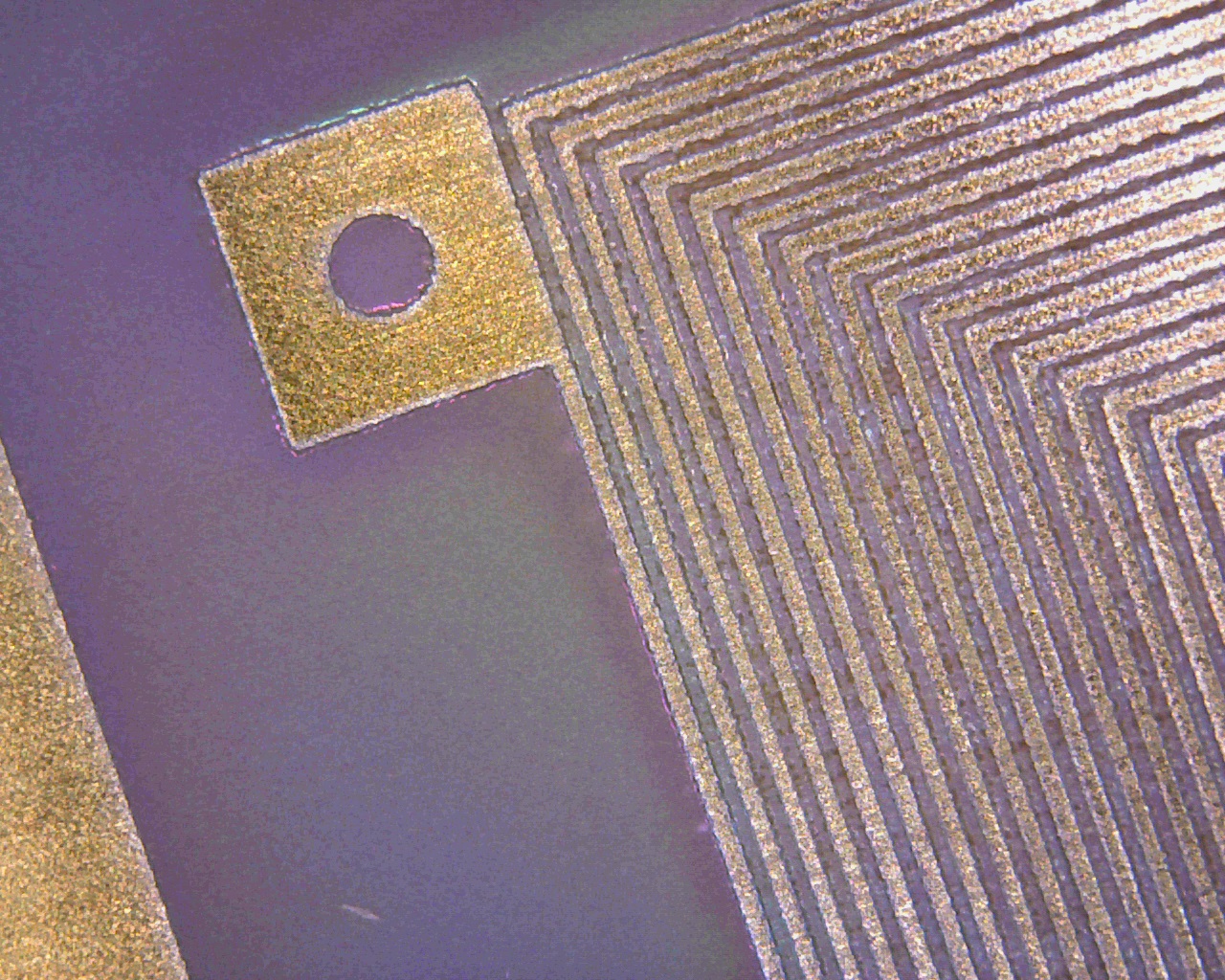
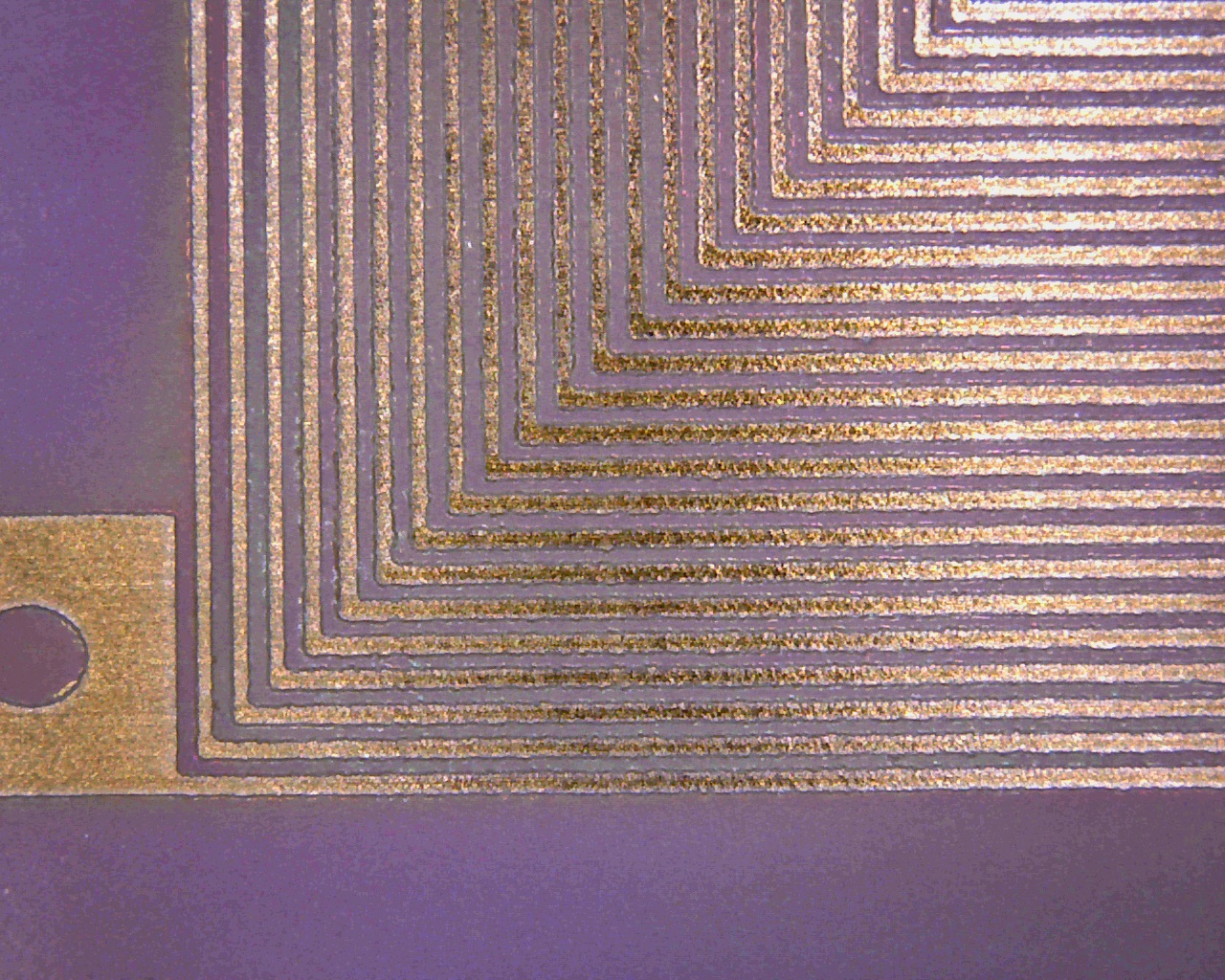

Hallo Guido - und alle Mitleser, nein - im grünen Bereich war der Test nicht (hatte ja auch keinen Durchgang ...). Anbei die Bilder des gestrigen Versuchs. Man kann die Ätzung bis zum Abbruch nach dem Kratzer recht gut erkennen. Wenn das beim nächsten Versuch genauso aussieht ist das fertig geätzte Ergebnis dann wahrscheinlich wirklich im grünen Bereich ... :-) Gruß Dieter
Auf alle Fälle ist die Belichtung in Ordnung. Was am Ende rauskommt hängt am Ätzen. Jetzt meine ich abe Unterschiede zwischen X und Y zu erkennen, oder liegt das am Foto? Grüße, Guido
Guido B. schrieb: > Jetzt meine ich abe Unterschiede zwischen X und Y zu erkennen, > oder liegt das am Foto? In welchem und wo genau?
Bild 1 und 3, die Leiterbahnen sind unterschiedlich dick ;) In Bild 2 sieht es irgendwie so aus, als ob oben rechts auch mehr "dreck" zwischen den Leiterbahnen ist.
Robin schrieb: > Bild 1 und 3, die Leiterbahnen sind unterschiedlich dick ;) Gemessen? Die Einen sind etwas "unsauberer" wie die Anderen - aber unterschiedlich von der Breite? Mag sein, dass auch die Perspektive mit rein spielt - oder es geht wirklich im 1/2 mil +/- ... Für mich erstmal gut genug, wenn ich das auch geätzt bekomme :-)
Hallo Ich denke, das war nur Spaß. Ist das jetzt eine 4 mil Spirale? Diese Unterschiede sind zu vernachlässigen. In 15-30 min bekommt das so, zu Hause keine hin. Ist die ganze Platine so schön geätzt worden? Ich frage mich jetzt, was das "2 mil 4 mil" bei Andreas bedeuten soll? 4 mil Abstand sind das nicht... vielleicht meint er etwas anderes? Das "gezittere" hast du prima gelöst. LG, Richard
Richard schrieb: > Ist das jetzt eine 4 mil Spirale? Hallo Richard, ja, 5 mil auf 4 mil reduziert und belichtet. Und ja, die ganze Platine sieht so aus. Das "Gezittere" ist bei dieser Auflösung immer noch etwas als Unschärfe zu erkennen. Liegt am Synch-Opto und bekomme ich auch nicht so einfach weg. Das liegt aber im < 0,5 mil-Bereich - und da ist es mir egal :-) Irgendwann diese Woche mache ich nochmal einen Versuch - und ätze mit HCL-Suppe ... ohne mit der Pinzette auszurutschen (hoffentlich) :-( Gruß Dieter
Dieter F. schrieb: > Das "Gezittere" ist bei dieser Auflösung immer noch etwas als Unschärfe > zu erkennen. Ja, ich habe es gesehen. Das ist aber nicht so schlimm. Diese Art von Kratzern kenne ich gar nicht. Was für eine Pinzette hast du? Metall? LG, Richard
Hallo Dieter, du hast weiter oben geschrieben, dass du den Laser in der Dunkel-Phase knapp unter dem Schwellstrom betreibst. Könnte es sein, dass da doch schon ein bisschen mehr belichtet wird als du vermutest und dadurch wird der Lack wenigstens geschwächt an den Stellen wo er stehen bleiben soll und ist dann nicht mehr so widerstandsfähig. Oder ist dein Basismaterial einfach nur alt, falsch gelagert oder ähnliches? Nicht dass du nach Fehlern suchst, die weg sind sobald du frische Leiterplatten benutzt. Alles in allem finde ich aber das Ergebnis sehr gut. Ich hätte nicht gedacht, dass das so fein geht. Da hast du die Latte für meinen Drucker schon sehr hoch gelegt! Zu meinen Linearencodern: Ich bin mir noch nicht sicher wie ich es machen soll. Ich könnte mehrere von den Sensoren einbauen und dann auch über die gesamte Länge der Achsen. Das wird aber teuer und begrenzt auch die Abmessungen von meinem Drucker. Der Schrittmotortreiber ist auch im Moment so aufgebaut, dass er eigentlich alles über die Schritte steuert. Ich dachte mir, man könnte die Magnetstreifen auch kürzen und dann nur in der Nähe der Endschalter eine Referenzfahrt machen. Dann kann man Schritte zählen und mit dem Sensor die Länge bestimmen. Ein bisschen Rechnen und ich habe immer die Schritte pro mm oder Inch. Und das Umkehrspiel lässt sich so auch bestimmen. In meinem Drucker vorher hat das auch so funktioniert. Nur das ich da die Auflösung und das Spiel händisch bestimmen musste. Mit weniger Sensoren wäre das also billiger und die Dimensionen des Druckers sind auch nicht mehr begrenzt. Grüße, Jens
Jens schrieb: > du hast weiter oben geschrieben, dass du den Laser in der Dunkel-Phase > knapp unter dem Schwellstrom betreibst. Hallo Jens, nein - knapp über ... . Und nein, der Laserstrahl ist da noch so schwach, dass ich keine Belichtung befürchte. Sieht ja auch alles gut aus (aus meiner Sicht). Ich verwende auch kein altes Material - da hatte ich mal, da musste ich aber einfach nur länger belichten und es hat noch funktioniert. Die Realisierung Deiner OpAmp-Idee steht noch aus - das werde ich wahrscheinlich mit einer Lochblene für den Synch-Opto kombinieren. Ich erhoffe mir davon eine noch bessere Genauigkeit des Synch-Impulses. Wobei ich hier wahrscheinlich auch schon knapp an den Grenzen der Genauigkeit des Polygonmotors (Jitter) bin. By the way - wieso setzt Du nicht auch jeweils einen Synch-Opto als Start-Markierung auf beiden Seiten ein? 1 Billig-Laserdiode (oder auch nur eine LED mit Optik) und 2 Fotodioden hinter einer Lochblende sollten die erforderliche Genauiglkeit bieten. Wenn Du sowieso nach der Schrittzahl belichtest bietet sich diese (günstige) Lösung doch an - oder? Was bei mir mit einer Genauigkeit im Nanosekunden-Bereich funktioniert (bei +/- 1/2 mil Abweichung entsprechen ca. 125 nS) sollte bei Deinen Verfahr-Geschwindigkeiten erst recht funktionieren. Ich weiß halt nicht, ob Du mit Schrittverlusten zu kämpfen hast - aber bei einer vernünftigen Rampen-Steuerung und optimaler Treiber-Auslegung wird das wohl kein Problem sein. Bei meiner Popel-Lösung hatte ich jedenfalls noch keine Probleme damit. Übrigens will ich die vorstehend beschrieben Lösung bei mir als Ersatz für die unpräzisen Gabellichtschranken einsetzen (hatte ich schon mal geschrieben). Genaue mechanische Endschalter sind mir zu teuer. Gruß Dieter
Hallo Dieter, das Belichten werde ich direkt über eine magnetischen Encoder machen. Ich habe ja insgesamt vier Achsen. Laser, X-Achse, Y-Achse und Spindel. Ich werde die Laserachse direkt mit dem Inkrementgeber synchronisieren. Das Da habe ich dann pro Puls ein Pixel. Die anderen Achsen werde ich so steuern, wie ich es oben geschrieben habe. Eine Lichtschranke verbessert mir dann das Verhalten nicht mehr, da ich über die Schritte immer die genaue Position habe. Das hat in meinem Drucker vorher auch schon gut funktioniert. Und Schrittverluste hatte ich keine. Ich hatte nur kurz mal die Idee alle Achsen mit Linearmesssystem auszustatten. Aber das ist mir zu aufwändig und zu teuer. Grüße, Jens
Jens schrieb: > Eine Lichtschranke verbessert mir dann das Verhalten nicht mehr Hallo Jens, das ist mir klar - ist auch nicht als Lichtschranke, sondern als Start-Messpunkt gedacht. Kann aktuell nicht nachvollziehen, was das Linearmesssystem für Vorteile bringt - steck aber auch nicht in der Materie. Ob das pro Puls oder pro Schritt ist, ist doch Jacke wie Hose - nur billiger im Falle des Schritts. Egal, ihr werdet schon wissen, wie das anzupacken ist. Ich habe mich bisher ja nicht damit beschäftigt und bin jetzt still. Gruß Dieter
Hallo zusammen, ich habe meinen Ätzversuch mit HCL-Suppe erfolglos durchgeführt. Was beim halb-geätzten noch gut aussah wurde zum Ende hin genau wie beim Ätzen mit Natriumpersulfat. Die Bereiche werden schlicht unterschiedlich schnell geätzt und es kommt zu Unterätzungen an einigen Stellen, während an anderen Stellen noch Material in den Zwischenräumen zu sehen ist. Nein - es liegt nicht an Resist-Rückständen, diese waren nicht vorhanden. Das habe ich nach einem kurzen Anätzen überprüft. Möglicherweise ist die HCL-Suppe nicht optimal - ich wollte aber auch keinen neuen Ansatz von dem Zeug machen. Ich kann nur jedem Hochachtung zollen, der solch feine Ätzungen sauber und regelmässig hinbekommt. Ich kann es nicht. Da ich problemlos und reprodzierbar z.B. QFN28 etc. geätzt bekomme ist das Thema damit für mich durch. Ich werde noch zum Spaß 3 und 2 mil Belichtungen (mit Anätzen) durchführen um ein Gefühl für die Belichtbarkeit zu bekommen. 1 mil brauche ich gar nicht zu probieren, da meine Technik dies aktuell nicht zulässt. In den nächsten Wochen werde ich mich um das Erstellen neuer Platinen für meine Lösung kümmern, damit der fliegende Aufbau mal ein Ende hat. Vielleicht werde ich auch mechanisch etwas tun, da das Scanner-Gehäuse doch sehr "flexibel" ist und meine Heißkleber-Verbindungen nicht besonders Langzeit-stabil sind. Gruß Dieter
Hallo, ich hätte noch eine Frage an diejenigen, die sich schon einmal Folien zum Belichten bestellt haben. Wo bekommt man denn solche Folien her und wie teuer sind die? Und wie klein können da die Strukturen sein? Die Idee ist es, sich auf diesem Weg einen Folienmaßstab machen zu lassen ähnlich wie sie in Druckern verbaut sind. Die Sensoren sind ja problemlos zu bekommen nur die Folienstreifen finde ich nirgends (außer man gibt 35€ aus). So könnte man die teuren Magnetstreifen durch optische Encoder ersetzen. Ich habe das mit normalen Folien versucht, aber bei meinem Drucker komme ich nur auf 100lpi. Das heißt der Drucker hätte dann nur eine Auflösung von 400dpi. Das ist mir ein bisschen zu wenig. 600dpi müssen es schon sein. 800pi wären erstrebenswert. Was meint ihr zu der Idee? Grüße, Jens
Jens schrieb: > Wo bekommt man denn solche Folien her und wie teuer sind die? Und wie > klein können da die Strukturen sein? Hallo Jens, guggst Du da: http://www.cadgrafik-bauriedl.de/leiterplattenfilme.htm Richard sprach von 4000 dpi, ich hatte 2400 dpi im Hinterkopf - lt. FAQ bei Bauriedl ist das auch so. "Die max. Auflösung der Belichtungsmaschine ist 2400 dpi oder umgerechnet etwa 0,0106 mm." Gruß Dieter
Hallo Jens, vielleicht findest du ja solche Folien in alten Druckern aif deinem Wertsoffhof. Jonas
Jens schrieb: > Was meint ihr zu der Idee? so ist auch mein Ansatz, hatte ich hier vorher auch geschrieben. Die Encoder bekommt man bei DigiKey. Von der riesigen Auswahl im Katalog sind allerdings nur wenige ab Lager lieferbar, ich habe einen 150 LPI Encoder (516-3036-ND) gekauft, mit knapp 11€ netto sind die auch nicht billig. Ich hatte versucht einen aus einem alten Drucker auszubauen, der ist aber vermutlich beim auslöten kaputt gegangen. In dem HP Drucker sind Platinen verbaut die sich nicht löten lassen, das Lot klebte wie Kateznschei**e. Immerhin ist die Folie für den Encoder zu gebrauchen. An einer Bestellung für eine Ersatzfolie würde ich mich beteiligen, Der Streifen aus dem Drucker ist 400 mm lang und hat ca. 330 mm Streifenmuster, Breite ist 6 mm. Die max. Länge bei Bauriedl habe ich nicht gefunden, so 400 mm sollten es schon sein.
@Jens Mr fällt gerade ein, dass och noch so Folien Scheiben rumliegen hab. Falls dir die helfen melde dich einfach. Jonas
Danke für den Link! Das ist das was ich gesucht habe. Wenn ich die Preisliste richtig verstehe kostet eine Folie von DinA4 mit Versand etwa 10€. Da bekommt man aber locker 20 Streifen drauf. Ich denke das sollte man mal versuchen. Meine Idee war es eben nicht auf Drucker angewiesen zu sein. Wenn das so funktioniert, dass man sich die Streifen machen lassen kann, dann sind die Dimensionen des Druckers und die Auflösung nicht mehr davon abhängig was ich auf dem Wertstoffhof finde. @Jonas An der Scheibe bin ich schon interessiert. Aber ich habe noch keine Encoder dafür (und im Moment auch keine Zeit). Ich werde auch zuerst die magnetischen Sensoren ausprobieren, da ich die schon da habe. Die sind nur eigentlich zu teuer für ein Bastelprojekt. Aber vielleicht kannst du ja einige Versuche mit den Encodern und den Folien machen. Ich würde mich auch an den Kosten beteiligen. Wie weit ist denn dein Druckerprojekt? Ich glaube du baust auch einen, der wie meiner funktionieren soll. Ich denke wir sollten uns hier noch ein bisschen weiter austauschen über Ideen, Probleme, Lösungen,... Sonst kämpft jeder für sich und dann dauert das alles recht lange. Was meinst du? Hast du schon Fotos vom Aufbau? Gruß, Jens
Hallo, mein Aufbau existiert aktuell nur in meinem Gehirn :) Ob ich wirklich mir einen Belichter baue weiß ich noch nicht. Ich werde mal versuchen die Scheiben auszuwerten. Die passenden Encoder hab ich auch aus dem Drucker. Nachdem mein Drucker so schnell nichts wird könntest du die Scheiben mit Encoder haben. Bin aber noch bis zum 6. September im Urlaub. Kannst du mal ein paar Bilder von deinem Aufbau machen? Jonas
Alles klar. Wenn ich die Encoder dazu bekomme, dann kann ich die an meinen Aufbau mal ausprobieren. Ich schick heute Abend ne PN mit Adresse. Fotos habe ich vom neuen Aufbau noch nicht. Da muss ich noch ein paar Teile fräsen, dann stelle ich die rein. Wenn es bei dir das Problem ist, dass die Mechanik für dich nicht zu stemmen ist, dann kann ich dir auch gegen Materialpreis die Teile von meinem Drucker nochmal fräsen. Ist für mich kein Problem. Kannst du dir gerne überlegen. Ich versuche das so modular wie möglich zu machen damit das jeder nachbauen kann. Daher will ich eigentlich auch keine Teile aus alten Druckern nehmen. Die hat nämlich nicht jeder. Gruß, Jens
Die Encoderscheibe aus dem HP habe ich auch ausgebaut. Die hat aber eine andere Auflösung als das Band für den Druckkopf, aufgedruckt ist 200 LPI / 1200 CPI. Der Encoder dazu hat auch kein Digitalsignal sondern analoges sin/cos geliefert, deshalb habe ich einen neuen von DigiKey gekauft. Der ist sehr einfach an den µC anzuschliessen: GND, +5V und die Pulse kommen sauber als TTL raus. Also vielleicht vorher prüfen welche Auflösung da vorhanden ist. Die Encoder und Streifen/Scheiben müssen von der Auflösung auch zueinander passen.
Hallo, der mechanische Aufbau ist nicht das Problem (mache eine Ausbildung zum Feinwerkmechaniker), eher fehlt mir die Zeit. Werde nach meinem Urlaub die Encoder mal testen. Wenn du sie dann gebrauchen kannst schick ich sie dir. Jonas
Angehängte Dateien:
-

3_mil_-_1.jpg
620 KB -

3_mil_-_2.jpg
570 KB -

3_mil_-_3.jpg
740 KB -

3_mil_-_4.jpg
540 KB -

2_mil_-_1.jpg
700 KB -

2_mil_-_2.jpg
660 KB -

2_mil_-_3.jpg
770 KB -

2_mil_-_4.jpg
460 KB
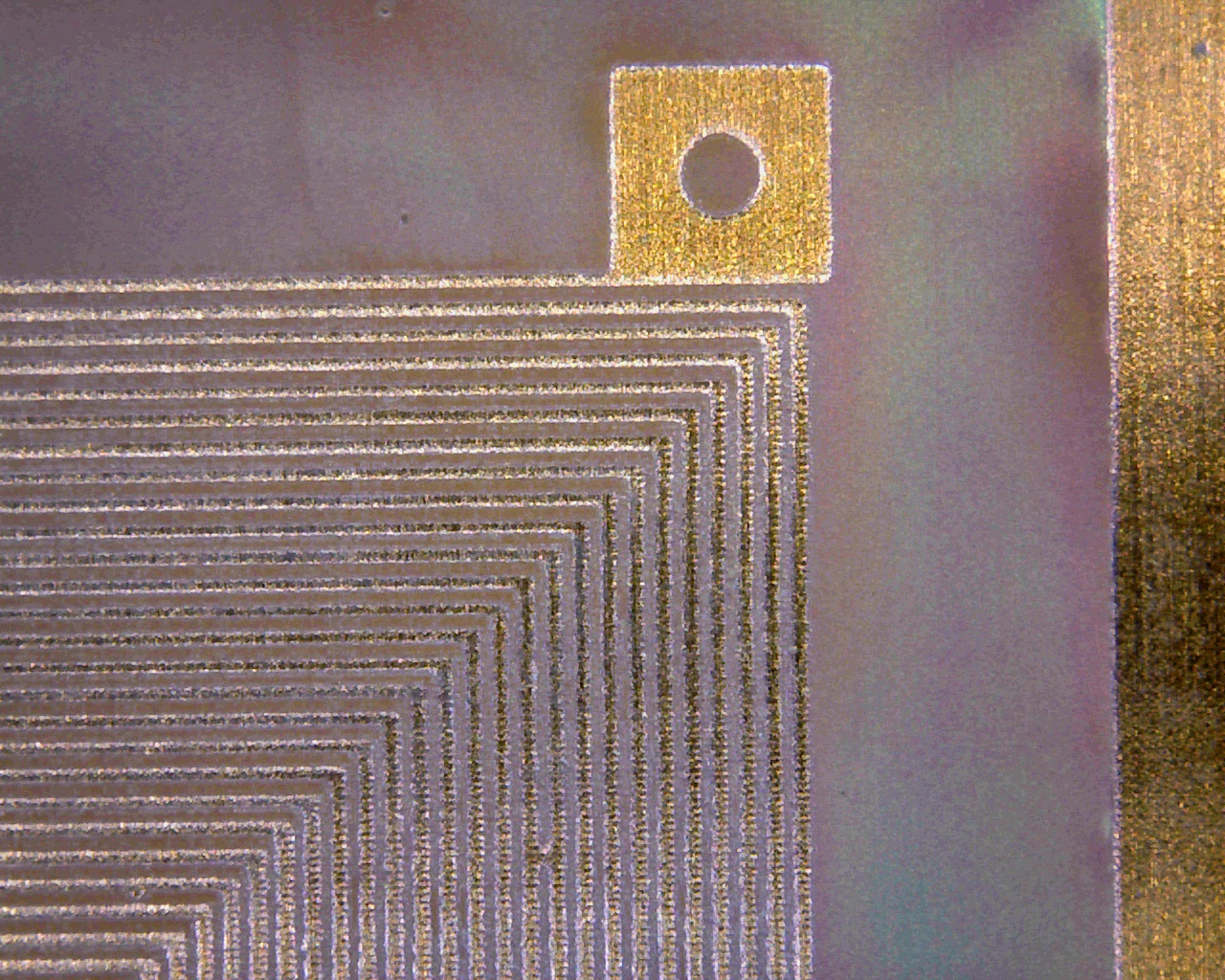
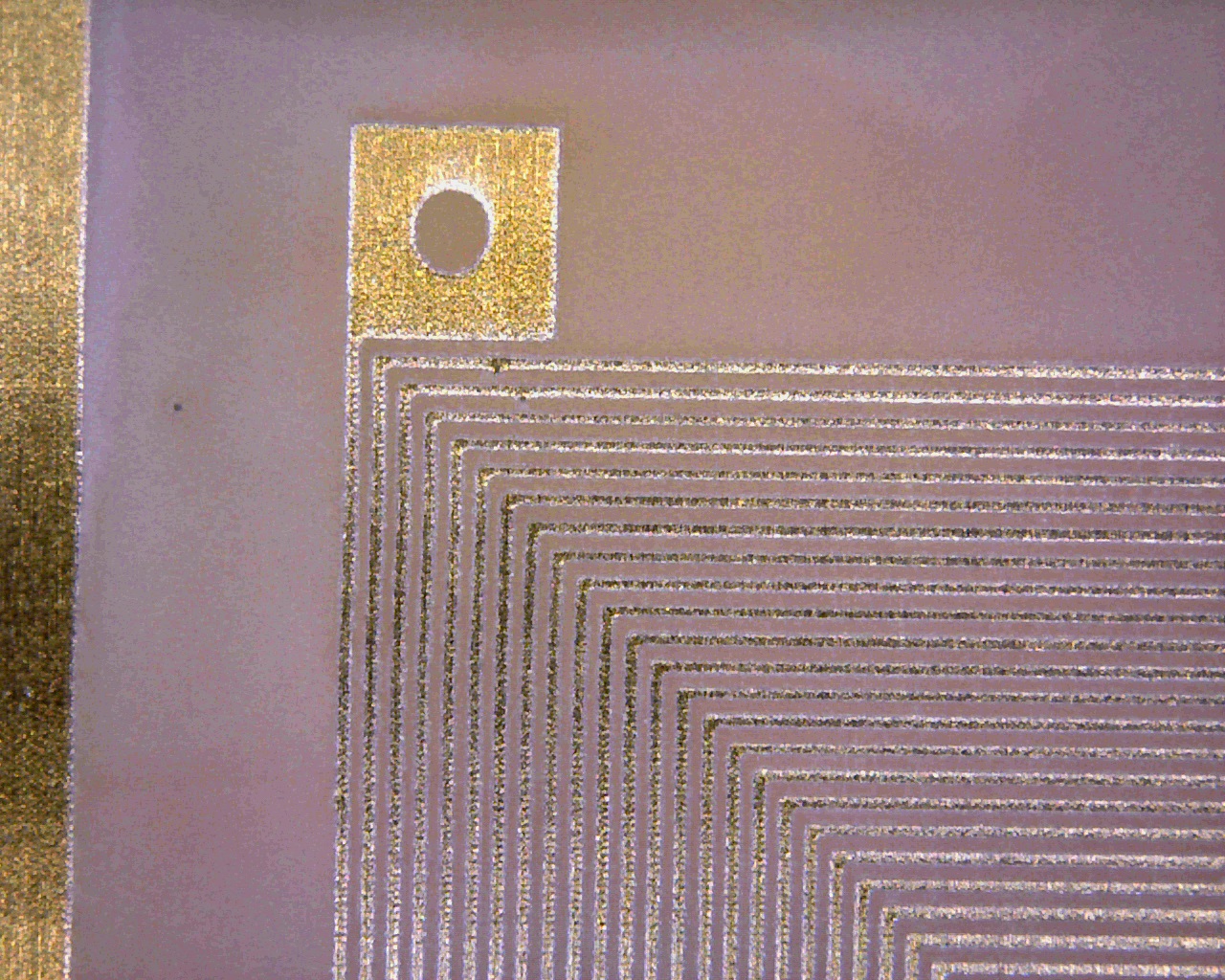
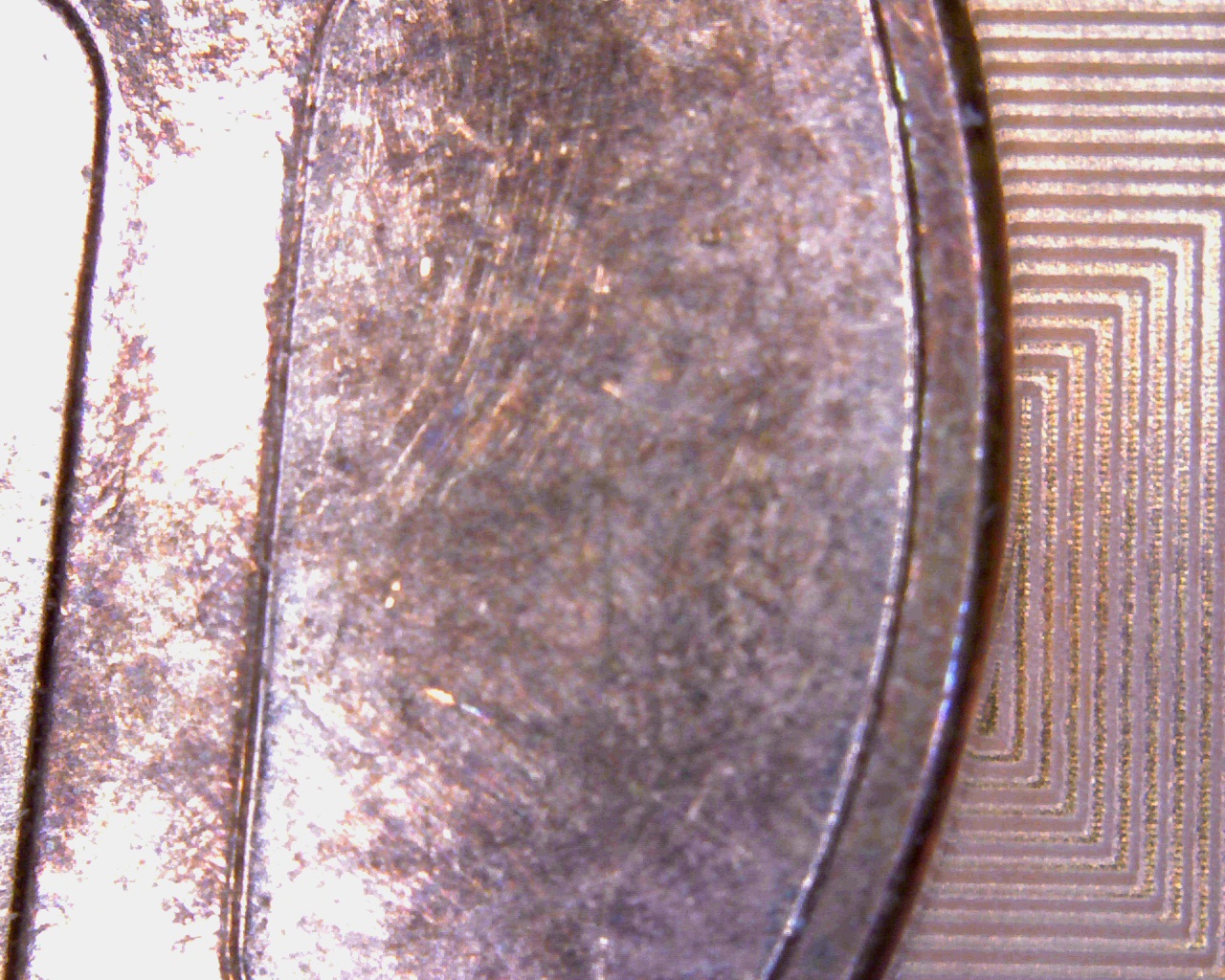
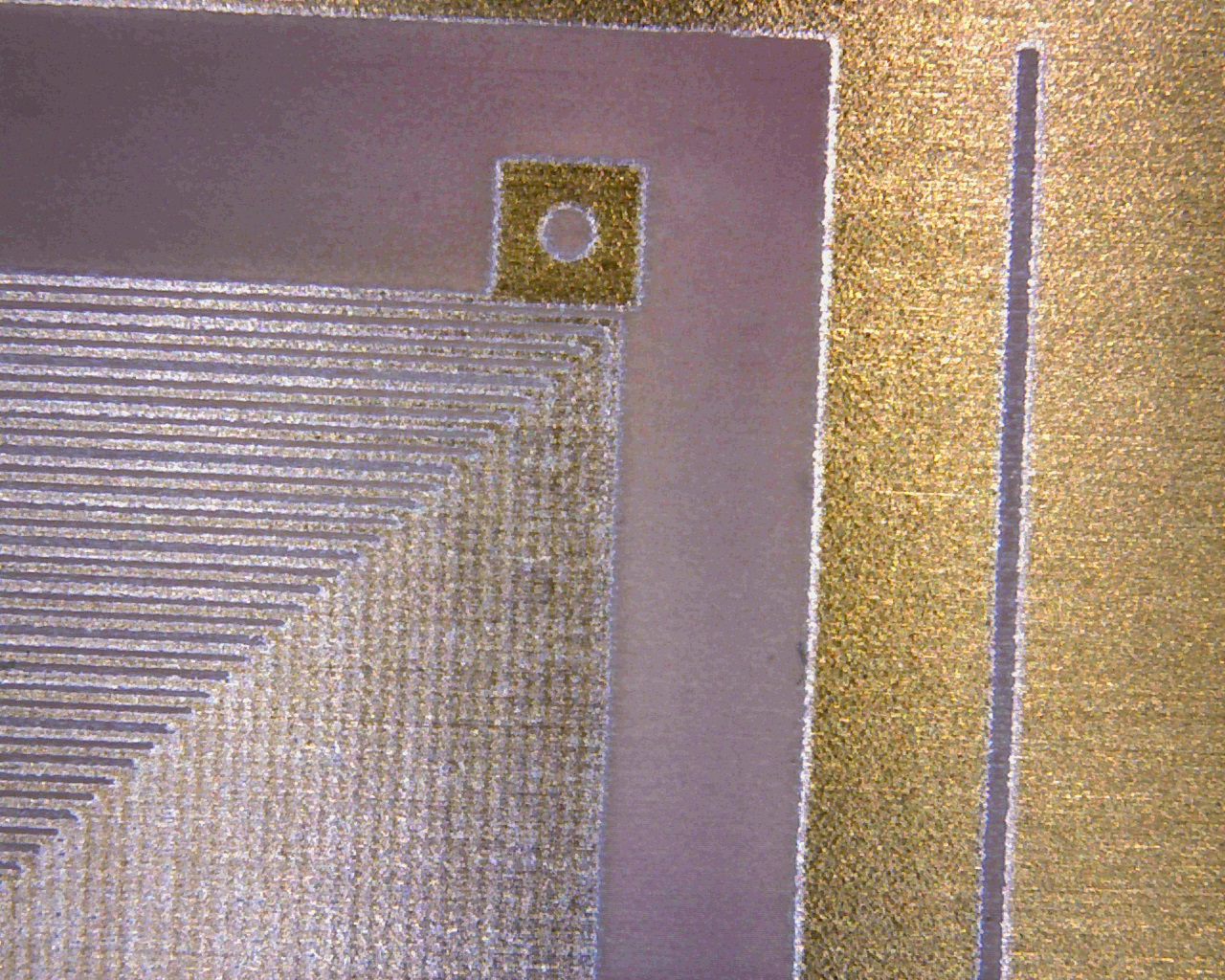
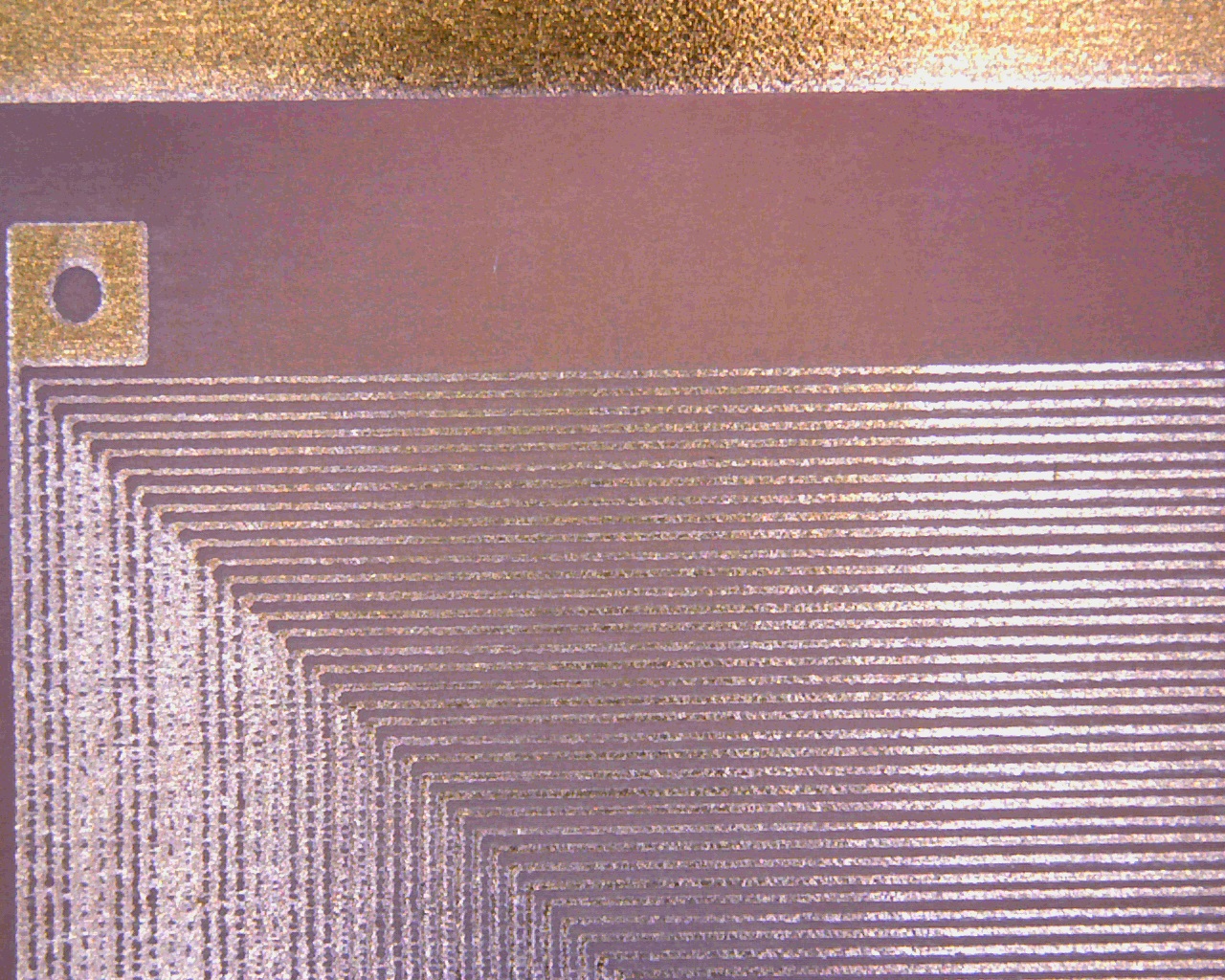

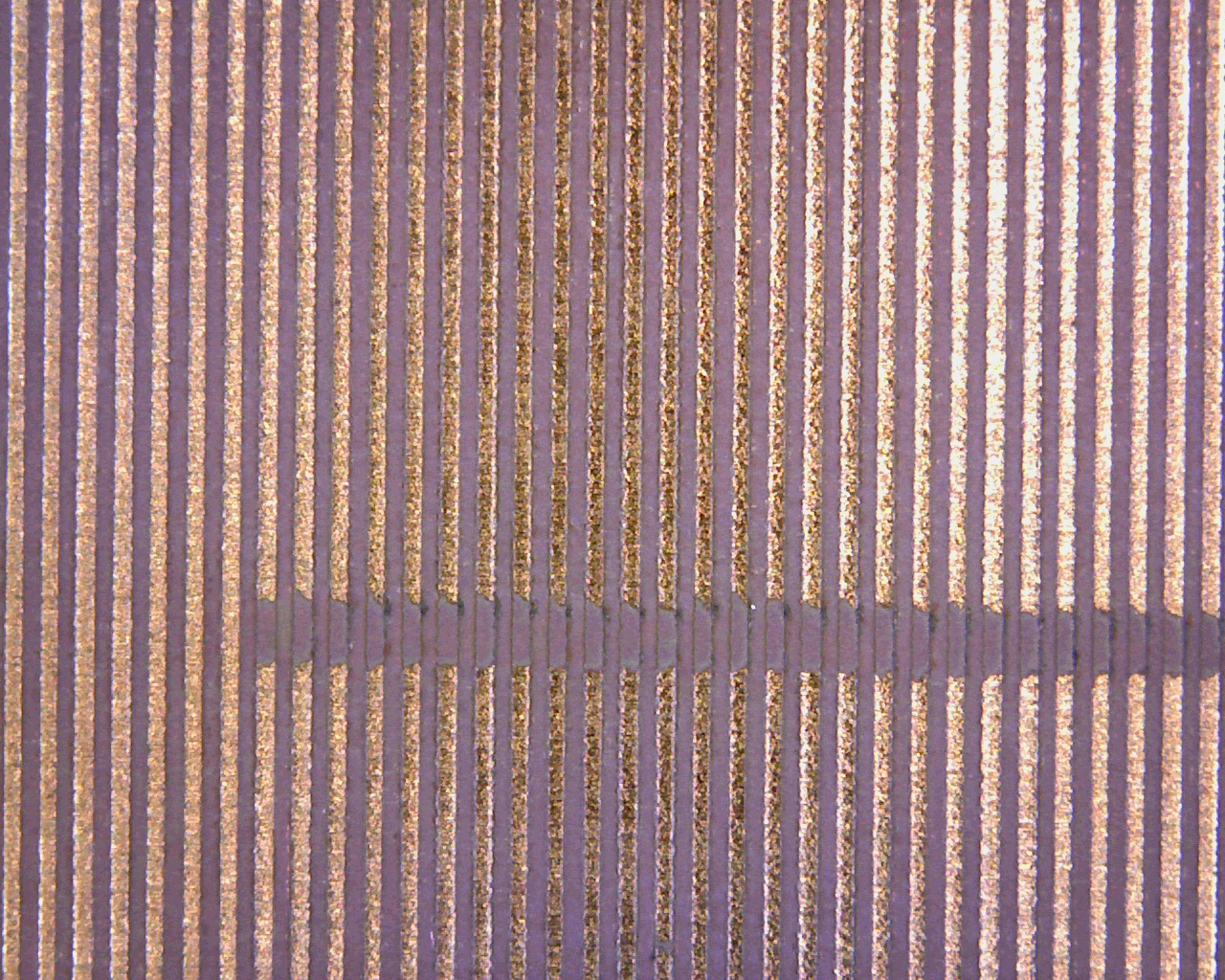
Hallo zusammen, anbei die angekündigten Fotos der 3 mil und 2 mil Versuche. Bei 2 mil sieht man recht schön, dass Aliasing mitspielt ... Natürlich sieht man auch, dass es dabei Probleme mit der Entwicklung bzw. dem "Zackern" gab :-\ Ich bin gespannt auf die 1 mil Versuche von Richard. Den Cent als Vergleich bitte dazulegen :-) Gruß Dieter
Hallo Dieter, 3 mil sieht ja super aus, und nicht mal so fein braucht man wirklich! Noch ein Tip zur Referenz der Achsen: Ich habe an meiner Mechanik an X und Y optische Reflexsensoren verbaut, da mir die mechanischen Endschalter alleine zu riskant erschienen. Die Sensoren (Sharp GP2S05) leuchten auf Aluflächen der Achsen und werden als Stromquellen mit einem ADC-Eingang der Steuerung ausgewertet. Dies bringt zwei Vorteile: 1. Schon spätestens 12 mm vor dem Anschlag der Achsen ist eine Spannungszunahme messbar. Mit zunehmender Annäherung wird diese Spannung größer. Die Zunahme ist nicht linear, lässt sich aber über ein Polynom 2. Ordnung sehr gut annähern. Damit lässt sich leicht die Schrittzahl bis zur Nullposition berechnen. Die Achse kann damit zur Nullposition in voller Fahrt verfahren werden. 2. Ca. 4 mm vor dem Anschlag hat der Ausgangsstrom einen Wendepunkt. Mit diesem kann die Referenzierung unabhängig von der reflektierenden Oberfläche sehr reproduzierbar erfolgen. Grüße, Guido
Guido B. schrieb: > Noch ein Tip zur Referenz der Achsen: Ich habe an meiner > Mechanik an X und Y optische Reflexsensoren verbaut Hallo Guido, nein - Reflexsensoren möchte ich nicht verbauen - auch die Gabellichtschranken (die halte ich fast für genauer) sind nur eine "Zwischenlösung". Ich liebäugele mit einem sehr präzisen (aber billigen) Sensor auf Basis einer Fotodiode und einer sehr kleinen Lochblende durch ein etwas dickeres Material (praktisch eine kleine Röhre, durch die das Licht nur genau Senkrecht durchscheint) ... mal schauen ... @Richard: Sind die Filme angekommen? Bauriedl ist ja schon sehr schnell und ich bin wirklich gespannt ... besonders auch auf die Ätzergebnisse - da versage ich ja vollkommen :-( Gruß Dieter
Hallo Dieter, auch wenn ich jetzt Dein Problem mit den Gabellichtschranken nicht richtig nachvollziehen kann, ich nehme seit Beginn Omron EE-SX Lichtschranken mit laut Datenblatt "Differential distance 0.025 mm max" und habe noch keine Abweichungen bemerkt. Wenn Du wirklich lieber einen mechanischen Referenzschalter möchtest, kann ich Dir gern einen Baumer My-COM "http://pfinder.baumer.com/pfinder_sensor/downloads/Produkte/PDF/Datenblatt/Mechanische_Praezisionsschalter_My_Com/My_Com_A100_80_web_DE.pdf"; schicken. Der hat eine Widerholgenauigkeit von <0,001 mm wenn Dir das reicht :-) Viele Grüße
Fritz R. schrieb: > auch wenn ich jetzt Dein Problem mit den Gabellichtschranken nicht > richtig nachvollziehen kann, Hallo Fritz, danke für den Tipp - ich habe "irgendwelche" Gabellichtschranken von Reichelt im Einsatz. Die Wiederholgenauigkeit von 0,025 mm erreiche ich damit nicht. Das ist für mich etwas ärgerlich, da ich damit aktuell Probleme mit der doppelseitigen Belichtung habe. Vielleicht habe ich auch etwas Probleme mit Streulicht - werde mal "Abdeckhauben" basteln und schauen, ob es besser wird. Die Abweichung ist nicht im mm-Bereich - eher weniger, aber für die doppelseitige Belichtung doch störend. Vielen Dank für das Angebot - aber mechanisch lieber nicht - bei meinen 2 linken Händen :-) würde das nicht gut ausgehen. Meine Idee ist, mit der Lochblendenlösung 2 Fliegen mit einer Klappe zu schlagen ... mal schauen ... Gruß Dieter
Hallo Dieter, die Omron Teile sind vollkommen problemlos,das sind fertige Sensoren also nur Versorgungspannung und ein open-kollektor Ausgang. Erstaulicherweise funktionieren die sogar zuverlässig mit 5V Betriebsspannung. Datenblatt findest Du im Google. Wenn Du Probleme hast welche zu kriegen einfach melden. PS. Habe gerade wieder zweiseitige Platine gemacht -> super Viele Grüße
Naja, besser 25 µm schaffe ich mit den Reflexsensoren schon, damit meine ich die Wiederholgenauigkeit, keine absoluten Werte. Dass Gabellichtschranken besser wären ist eine kuriose Idee. Aber jeder wie er mag. ;-) Streulicht ist mit den IR-Sensoren heutzutage meist kein Problem mehr, es sei denn die Sonne scheint direkt ins Zimmer, was sich ja leicht vermeiden lässt. Grüße, Guido
Fur Gabellichtschranken sollte man einen eigenen vreg Haben. Diese sind extrem Spannungsabhangig wegen Wiederholgenauigkeit.
Guido B. schrieb: > Dass Gabellichtschranken besser wären ist eine kuriose Idee. Hallo Guido, wieso ist das kurios? Die schalten genau dann, wenn das Licht der LED auf die Fotodiode / den Fototransistor fällt. Beim Reflexsensor ist die Reaktion doch auch von der Reflektion des Materials und damit auch von Unebenheiten etc. abhängig - oder? Und Streulicht ist aus meiner Erfahrung immer ein Problem, wenn das ausgesendete Licht nicht moduliert wird ... Gruß Dieter
Hallo Dieter, das Problem mir den Gabellichtschranken ist, dass sie eigentlich garnicht schalten. Mit zunehmender Abdeckung des Sensors steigt die Spannung am Empfangstransistor an, wann das deine Elektronik als 1 wertet, hängt von vielen Parametern ab. Der Ausgangsstrom des Reflexsensors weist, wie geschrieben, einen Wendepunkt auf. In Abhängigkeit von der Oberfläche usw. ändert sich der absolute Strom, der Wendepunkt wird aber durch die Optik bestimmt und ist daher immer an derselben Stelle. Die heutigen Sensoren sind recht selektiv bzgl. der Wellenlänge. Dies kombiniert mit LED-Beleuchtung bringt viel weniger Probleme als man es von früher her gewohnt ist. Solange direkte Sonnen- einstrahlung verhindert wird, sind weitere Maßnahmen eigentlich nicht mehr nötig. Grüße, Guido
Hallo Dieter, also mit dem Selbstbau von deinen Lichtschranken bin ich mir nicht sicher ob du da zum Ziel kommst. Wie sieht es mit Gabellichtschranken aus? Zum Beispiel diese hier: http://www.pollin.de/shop/dt/NTI0OTc4OTk-/Bauelemente_Bauteile/Aktive_Bauelemente/Optoelektronik/Gabellichtschranke_VISHAY_TCYS5201.html oder http://www.pollin.de/shop/dt/MTA5ODc4OTk-/Bauelemente_Bauteile/Aktive_Bauelemente/Optoelektronik/Gabellichtschranke_SHARP_GP1S22.html Mit denen habe ich immer gute Erfahrungen gemacht. Die haben einen Komparator integriert und die Spaltbreite ist bei 0,3mm - 0,5mm. Sie schalten aber wesentlich präziser. Oder du steigst auch auf die Encoder aus Druckern um und verwendest die als Lichtschranke. Viele sind da ausgelegt auf 150lpi oder mehr. Das macht eine Strickstärke (vom Folienstreifen) von 0,085mm. Dieses genaue Schaltverhalten müssen die ja bringen. Damit sollte das kein Problem mehr sein mit deiner Positionserkennung. Grüße, Jens
Hallo zusammen, @Guido: O. K. ich werde es mal ausprobieren - aber erst in ein paar Wochen. Meine vergangenen Erfahrungen mit CNY 70 machen mir aber nur wenig Hoffnung - insbesondere in Bezug auf Streulicht. @Jens: Ich möchte keine Lichtschranke selbst bauen - da hast Du mich falsch verstanden. Ich werde einen punktförmigen Lichtsensor/Lichtdetektor bauen. Aber vielen Dank - der 2. Link schaut, wegen des schmalen Spalts, interessant aus. Werde ich auch mal irgendwann in der nächsten Zeit (wenn ich mal wieder was bei Pollin bestelle) ausprobieren. @Richard: Wie schaut es aus? Die Folien von Bauriedl sollten doch längst angekommen sein - oder? Ich bin wirklich gespannt auf Deine Ergebnisse ... bitte lass uns daran teilhaben. Ich bin erstmal wieder ein Weilchen raus aus dem Geschäft, da ich mich beruflich mit neuen Aufgaben beschäftigen muss. Da bleibt aktuell wenig Zeit fürs Hobby :-( - aber mitlesen geht immer :-) Gruß Dieter
O.K. Dieter, mit dem CNY70 hätte ich es auch nicht probiert. ;-) Die GP2S05 gab es sehr günstig bei Pollin, jetzt leider nicht mehr. Da könnte man nach Ersatz suchen, die sind richtig mit Linsen ausgestattet. Notfalls kann ich dir ein paar davon schicken, habe schließlich Vorräte gehamstert. Bei mir geht es auch voran, Bohren sollte bald laufen, dann kommt der Belichterbetrieb ins Rollen. Erstmal bin ich aber auch wieder eine Woche aus dem Spiel. Grüße, Guido
Guido B. schrieb: > mit dem CNY70 hätte ich es auch nicht probiert. ;- Und warum nicht? Bis 3 mm Abstand ist der recht zuverlässig - mal vom Streulicht abgesehen. Selbst dafür hat er eigentlich einen Filter, der aber m.E. nach nicht optimal ist. Klar ist der nichts für "größere" Entfernungen.
Angehängte Dateien:
-

uebersicht.JPG
200 KB -

motor1-top.JPG
240 KB -

motor1-bottom.JPG
240 KB -

motor2-top.JPG
190 KB -

motor2-bottom.JPG
240 KB -

QK1-3671.JPG
200 KB -

QK1-3851.JPG
210 KB -

Encoderscheibe.JPG
240 KB -

aufbau.JPG
210 KB -

rechts.JPG
210 KB -

links.JPG
210 KB

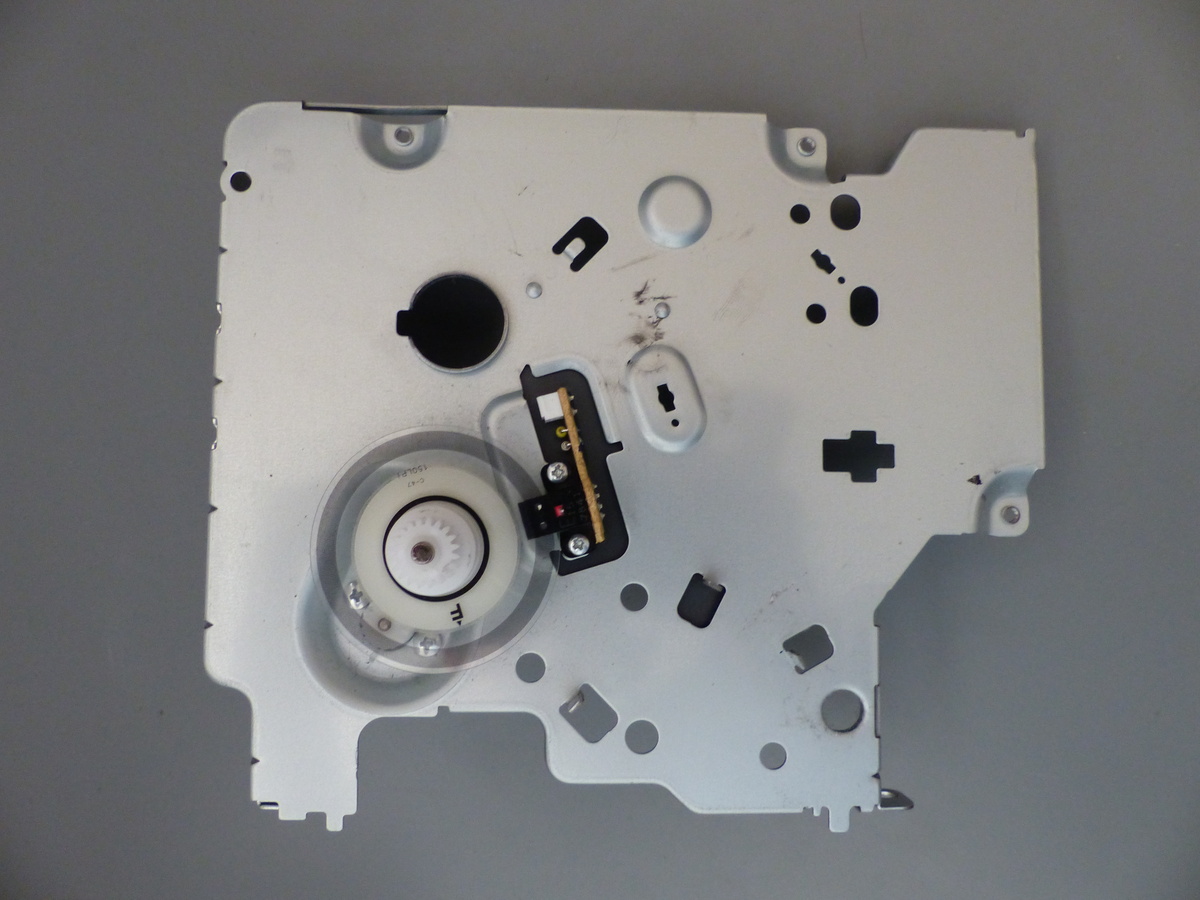
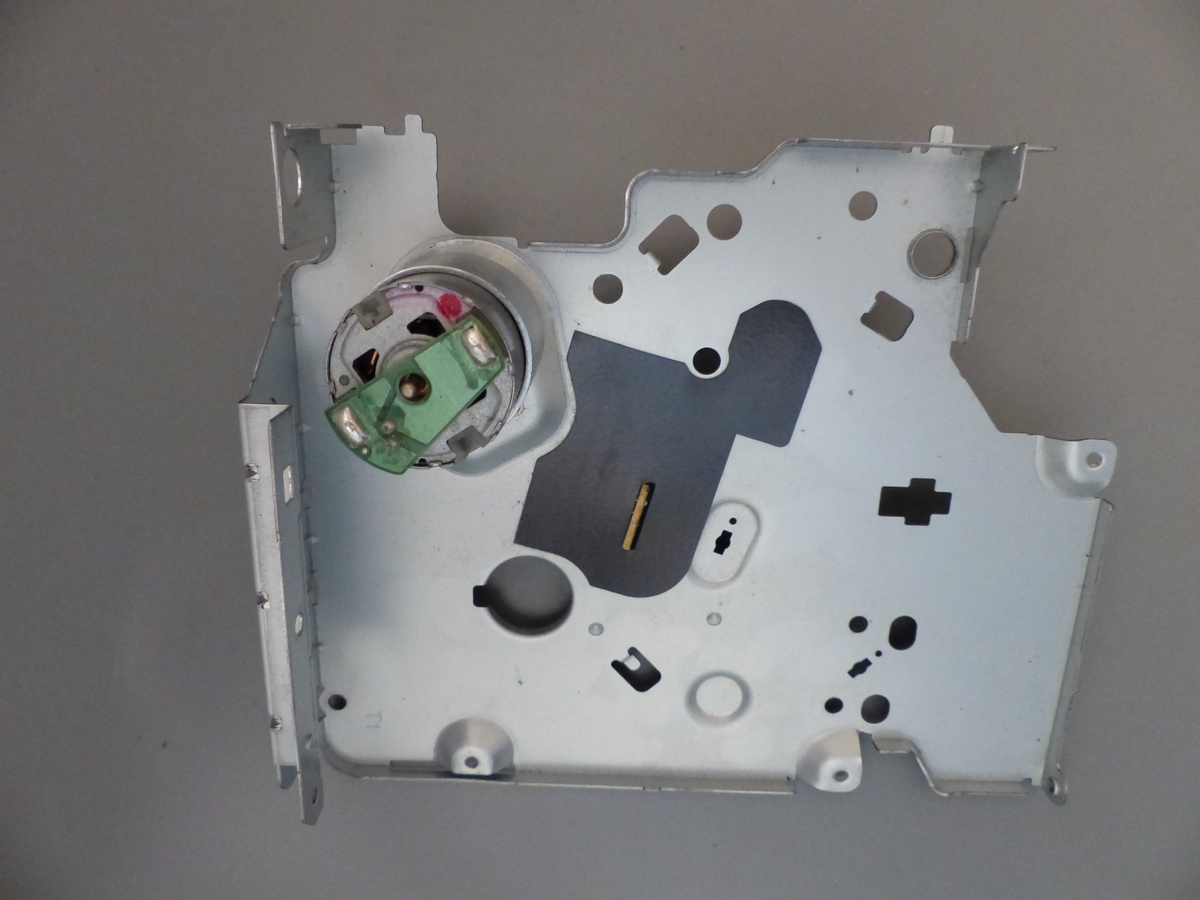
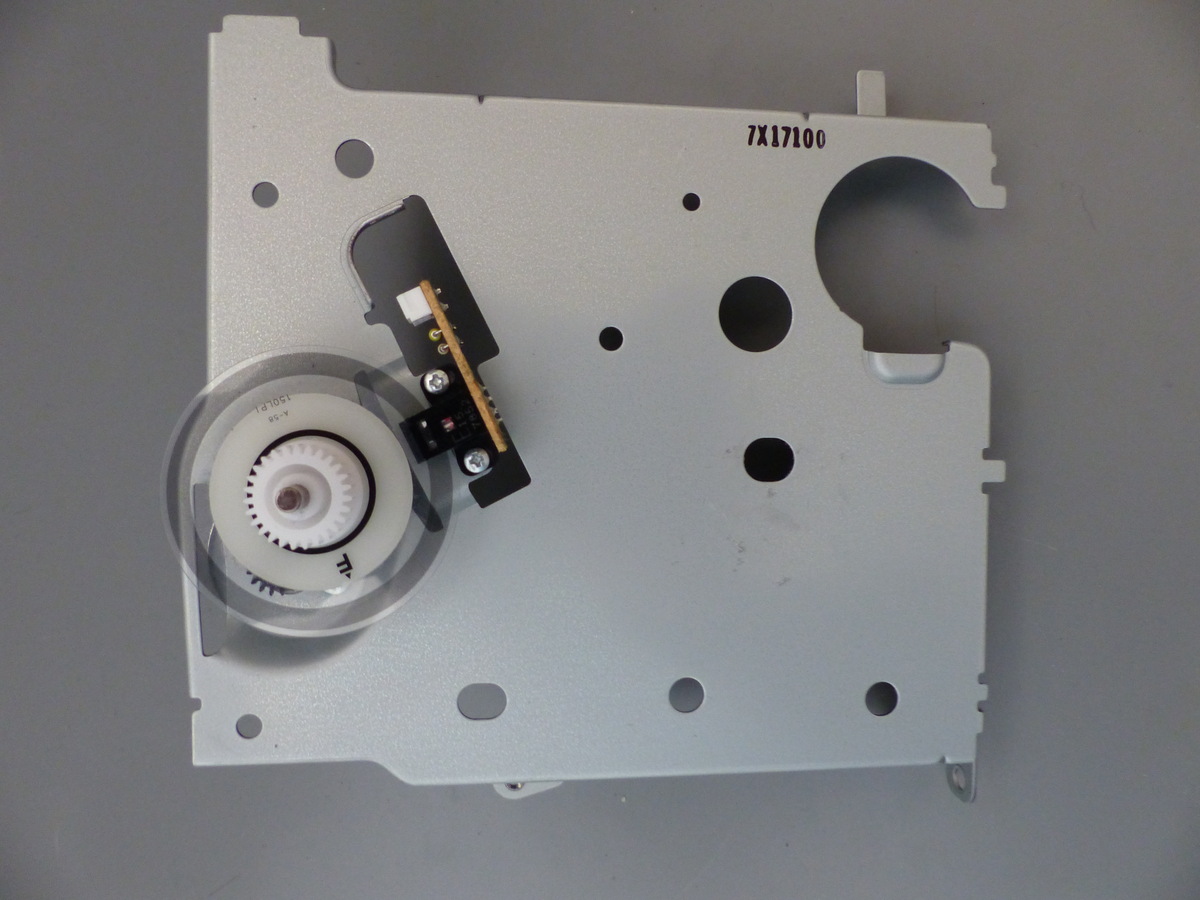
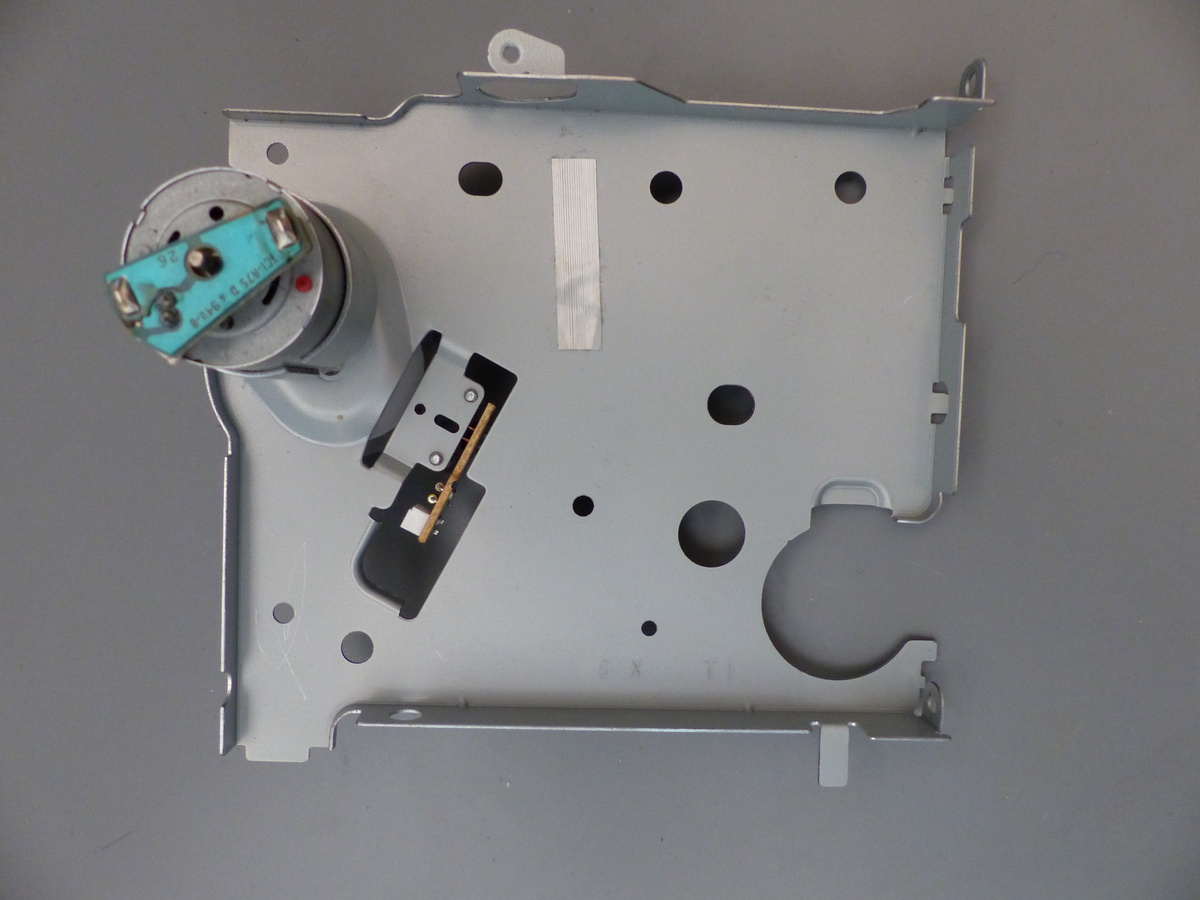
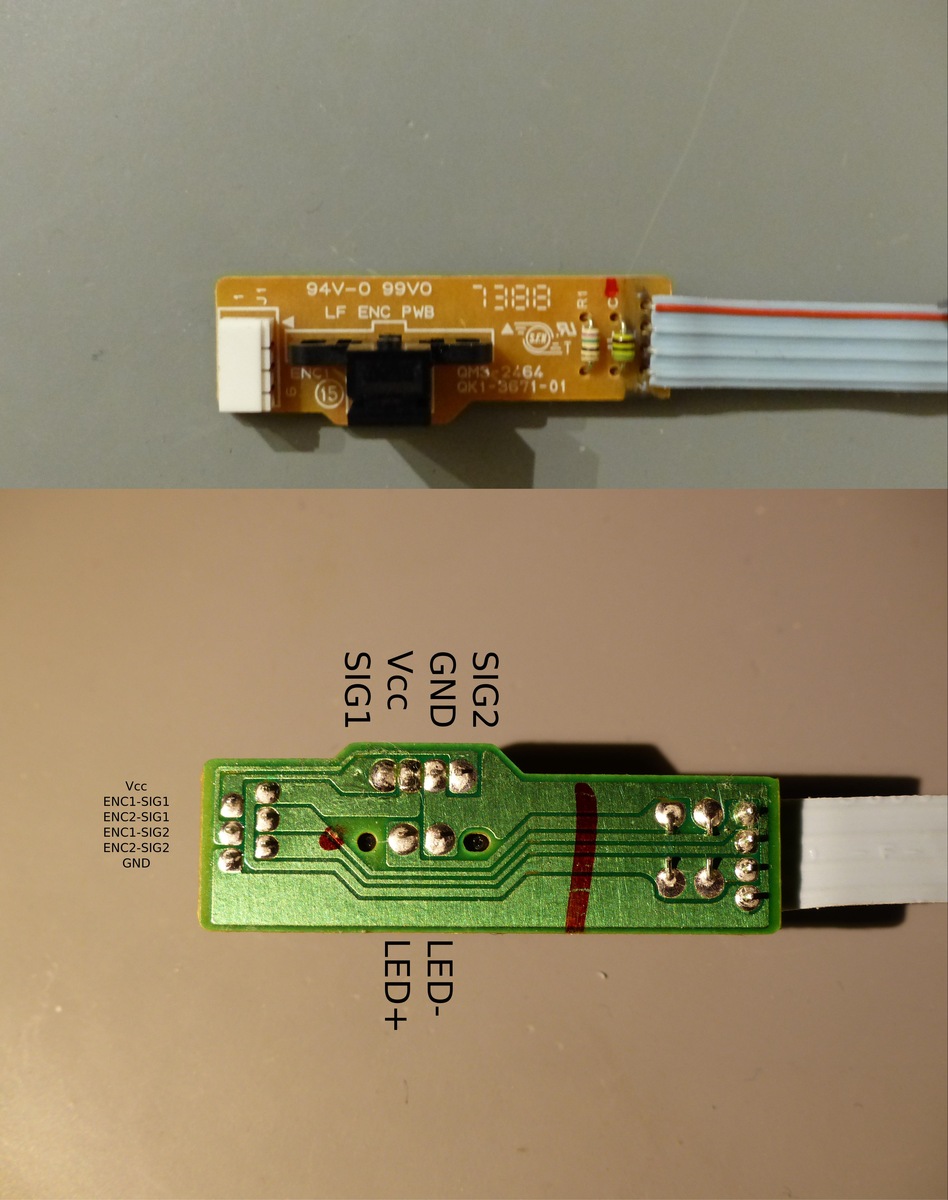
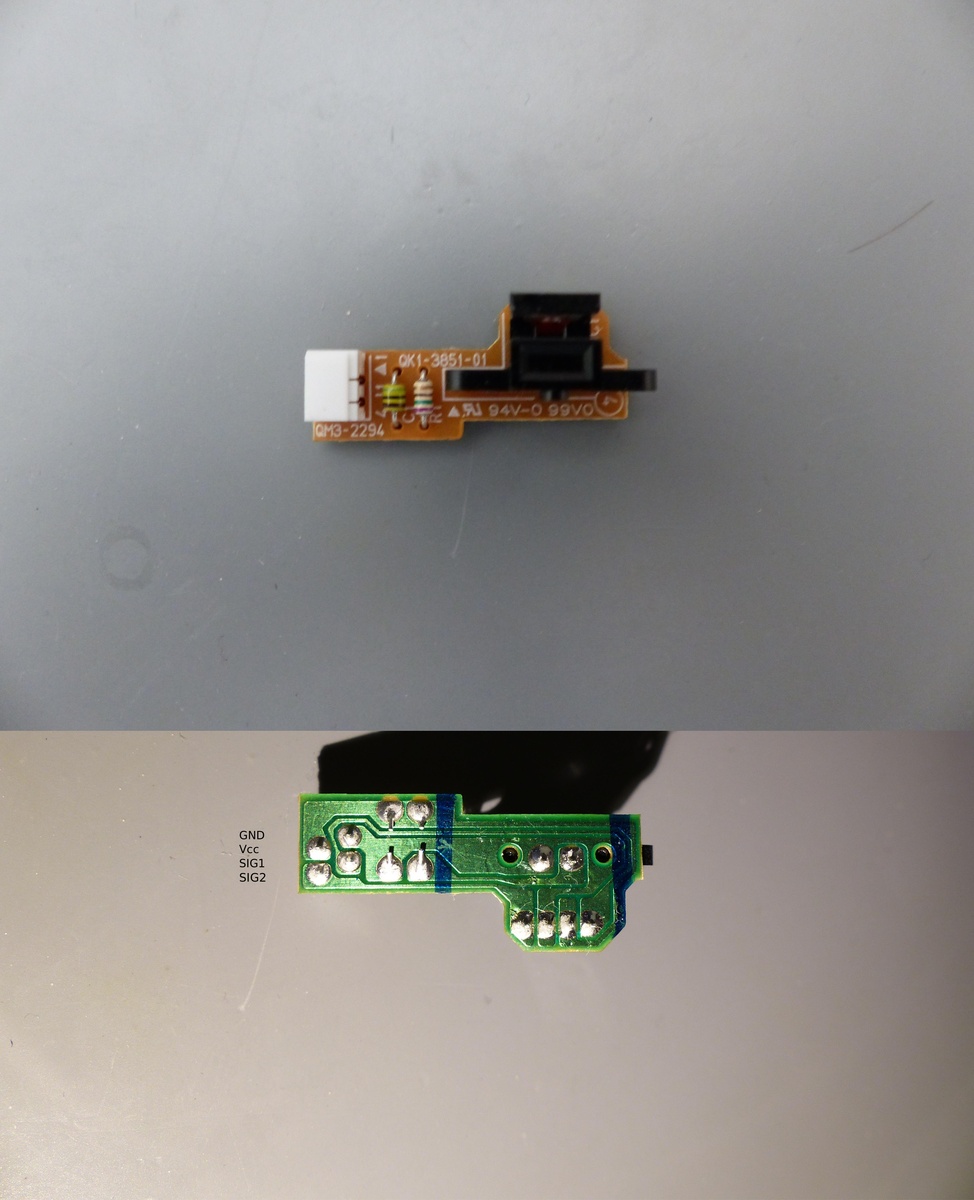

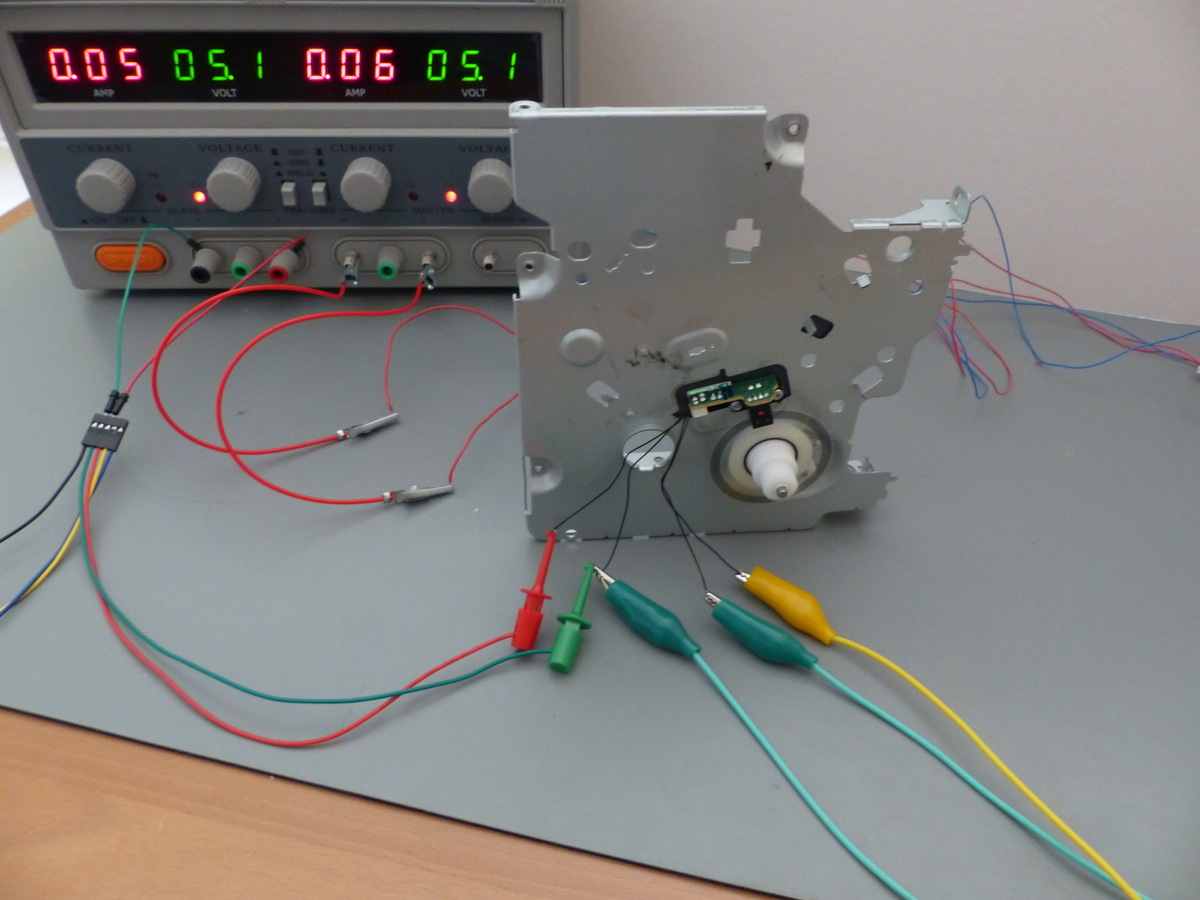
Hallo, ich hab jetzt mal die optischen Encoder angeschaut: Ich habe zwei unterschiedliche Typen: 4 Polig: Standart Encoder mit LED und Empfänger. 3x QK1-3010 QM3-1275 1x QK1-3008 QM3-1273 1x QK1-3009 QM3-1274 1x QK1-3005 QM3-1270 LED und Empfänger sind nach oben ausgerichtet. Erkennt wenn das LIcht von einem Gegenstand reflektiert wird. 6 Polig: Eine LED und ein Empfänger der eine Spannungsversorgung braucht und dann zwei Signale ausgibt. 1x QK1-3671 QM3-2464 Doppelencoder 2x QK1-3851 QM3-2294 mit Motor Die 6 poligen habe ich getestet, sollten alle gehen. Dadurch dass die 6 poligen zwei Signale ausgeben lässt sich die Richtung bestimmen. Passende Kabel hätte ich auch. Jens schau mal ob du was gebrauchen kannst. Jonas
Jonas G. schrieb: > Die 6 poligen habe ich getestet, sollten alle gehen. > Dadurch dass die 6 poligen zwei Signale ausgeben lässt sich die Richtung > bestimmen. Die 4 poligen geben auch zwei Signale aus. Die Anschlüsse sind dann einfach nur: -Vcc -Signal1 -GND -Signal2 So habe ich zumindest einen rechts neben mir auf dem Schreibtisch stehen ;) Beste Grüße Niels PS.: Ich kann an der Stelle die Epson Stylus empfehlen, bei denen sind die Sensoren von der Platine mit der Druckkopfsteuerung getrennt.
Hallo Dieter, der CNY70 besitzt einfach eine LED und einen Fototransistor im gemeinsamen Gehäuse. Klar bekommt man damit irgendwie spiegelnde Gegenstände detektiert, aber für reproduzierbare Einstellungen sind die nicht gedacht. Der Fototransistor ist für Fremdlicht aus allen Richtungen empfindlich, das meinst du vermutlich mit Streulicht. Bei den Sharp-Sensoren guckt der Empfänger mittels Linse exakt auf den Punkt, auf den der Sender sein Licht bündelt. Ich habe mal geschaut: Reichelt hat den GP 2S700CHP, da sieht man auf dem Produktfoto schön die beiden Linsen, die aus einem für sichtbares Licht undurchlässigen Material bestehen. Furchtbar teuer sind sie nicht und Drähte bekommt man da sicher auch noch dran. Grüße, Guido
Niels J. schrieb: > Die 4 poligen geben auch zwei Signale aus. Die Anschlüsse sind dann > einfach nur: > -Vcc > -Signal1 > -GND > -Signal2 Kann auch sein, hab die 4 poligen nicht getestet. Meine Encoder kann man auch als Ersatzteil kaufen: http://www.uniomax.com/de/canon-ix7000.html http://buchert-trading.net/Canon:.:197:3.html?language=en Jonas
Hallo Guido, Moment ... zuerst schriebst Du vom GP2S05 - und da sehe ich nicht die tollen Unterschiede zum CNY 70 - außer dass der Sharp bei 4 mm und der CNY 70 bei 0 mm die höchste "Reaktion" zeigen. Das es auch andere Reflex-Sensoren gibt - klar. Der von Dir jetzt angesprochene Sharp-Sensor GP 2S700CHP z.B. ist aber auch nicht Streulicht-resistent: 1) Regarding to prevation of malfunction To prevent photointerrupter from faulty operation caused by external light, do not set the detecting face to the external light. Also, if some other electronic components are located close to this device, false operation may occur. (The light reflection caused by the other components may slip into the photodetecting portion of the device and if may cause false operation.) Gruß Dieter
Hallo Dieter, das ist ja dieselbe Sensorfamilie (GP2S...) und die Unterschiede sind gering. Der GP2S05 ist halt nicht mehr verfügbar, hat aber ebenfalls das Linsensystem und funktioniert prinzipiell wie der GP2S700. Klar, wenn ich da von vorne mit einer starken Lampe reinstrahle, das irritiert den, mache ich ja aber nicht. ;-) Sein Ausgangsstrom ist aber hier völlig unabhängig davon ob das Licht an oder aus ist. Direkte Sonneneinstrahlung ist sicher suboptimal, das Problem habe ich aber hier nicht. 4mm bzw. 3 mm versus 0 mm für das Maximum, das macht genau den entscheidenden Unterschied aus. Vorher ist der Ausgangsstrom kleiner, hinterher auch wieder. Ich habe also keinen Wendepunkt (oops) sondern ein Maximum, das ich zur Referenzierung ausnutzen kann. Und dieses bevor die Maschine auf Block läuft! O.k., es sind in der Praxis nicht exakt 4 mm, aber es geht ja auch nur um die Reproduzierbarkeit und diese ist hoch. Grüße, Guido
Angehängte Dateien:
-

20150903_232357.jpg
230 KB
Hallo Jens, ich hab beim aufräumen den Strip gefunden. Der Strip ist etwa 40cm lang. Jonas
Hallo Jonas, den hätte ich gerne mit dazu wenn du ihn nicht brauchst. Grüße, Jens
Ich hatte dir nochmal eine Nachricht geschrieben, kam die an? Ich hab dir jetzt die Motoreinheit 1 und einen Teil von dem QK1-3671 eingepackt. Und natürlich der Strip. Ich schau dann heute was das Porto kostet. Jonas
Hallo, die kam an. Alles klar. Und ich brauch noch die Bankverbindung. Gruß, Jens
Hallo Jonas, die Überweisung habe ich am Wochenende gemacht. Sollte also bald drauf sein. Gruß, Jens
Hi all, da ich es nicht lassen kann (zumindest gedanklich :-) ) ... Ich verstehe immer noch nicht, warum ihr unbedingt mit den "Codierstreifen / -kreisen" arbeiten wollt. Kann ich nachvollziehen, wenn mit Servos oder "normalen" Motoren gearbeitet wird - aber bei Schrittmotoren? Schrittverluste kann man - denke ich - vermeiden. Wenn ich dann nach jedem Schritt eine fixe Zeit belichte (oder auch nicht), dann kann ich die Belichtung sehr genau steuern. (Nutze ich einen "normalen" Motor bin ich natürlich auf einen Encoder angewiesen.) Belichte ich während der Bewegung - die ja beim Schrittmotor (denke ich) leicht "ruckelnd" (natürlich im sehr, sehr kleinen Maß) ist - dann erzeuge ich doch automatisch Unschärfen - oder? Muss ich dann nicht sowieso das Encoder-Event mit der Schrittfolge synchronisieren? Übrigens habe ich mich dazu entschieden wechselweise an der Weiterentwicklung Fertigstellung der Schaltung Layout und an einem mechanischen Neuaufbau (erstmal nur konzeptionell) zu gehen - wie geschrieben, in der naher Zukunft, Zielkorridor so Q1 / 2016. Ich werde das Konzept auf einen beweglichen Schlitten für die zu belichtende Platine umstellen und die Lasereinheit fest montieren. Dann kann ich generell mit kürzeren Kabeln und ohne bewegliche Teile mit verbauter Elektronik arbeiten. Als Konstruktions-Ziel habe ich mir eine Grundläche von max. A4 - eher noch etwas kürzer (so 25 cm) gesetzt. Natürlich wird der Schlitten im Betrieb deutlich darüber hinaus fahren (da muss ich noch Hirnschmalz investieren) aber es wird inaktiv schön Schrank-tauglich :-). Mal schauen, was ich mit meinen linken Händen (und mit Hiilfe meines Bruders ...) so hin bekomme. @Richard: Wirklich schade - kannst Du wenigstens schreiben, ob Bauriedl die 2- und 1-mil ohne Aliasing hinbekommt? Kann ich mir nicht vorstellen, wäre daher wirklich interessant ... Gruß Dieter
... übrigens habe ich mal die Frequenz zur Steuerung des Polygonspiegelmotors halbiert - der Motor hörte sich ganz gut an - der Jitter war aber viel zu heftig: Geht also nicht.
Hallo Dieter, ich möchte die Sensoren verwenden, da auch ein Schrittmotor mit Riemen ein Umkehrspiel hat. Den Schrittmotor verwende ich nur noch zum Antrieb aber nicht mehr für die Position. Daher brauche ich einen Sensor. Und die Schrittauflösung geht nur in den seltensten Fällen genau auf mit der Auflösung des PDF. Da kommen dann Werte raus wie bei meiner Version 1 von 756dpi. Mit Sensor dann aber genau 600dpi. Neue Drucker arbeiten ja auch eigentlich nur noch mit Encodern. Bei der Auflösung die hier angestrebt wird ist das dann wahrscheinlich auch notwendig. Ob das dann tatsächlich besser ist wird man noch sehen. @Jonas: Die Sachen sind heute angekommen. Vielen Dank! Ich denke ich kann mich am Wochenende mal drüber machen. Die Ergebnisse werde ich dann hier posten. Ich habe mir den Streifen mal angesehen. Der hat 150lpi. Das ist schon fein. Ich werde mal ein Bild machen im Vergleich zu dem was mein Drucker gemacht hat. Grüße, Jens
Hallo @Dieter Sorry, das ich mich nicht gemeldet habe. Die Filme sind nicht vom Bauriedl, der hat tatsächlich nur 2400 dpi. Ich bleibe am Ball (1 mil Platine) und würde hier auch gerne mitmachen (Laserbelichter)... Ich denke in ca. 7-10 Tagen bin ich wieder da. LG, Richard
Hallo, ich habe mich auch grad ein bisschen bei Bauriedel umgesehen was der so belichten kann. Das mit den 2400dpi habe ich auch gesehen. Den Linienmaßstab, den man für die optischen Encoder braucht liefert 600dpi. Der hat also 150lpi. Was meint ihr? Reicht das aus? Oder braucht man dafür eine wesentlich größere Auflösung? Ich möchte für meinen Drucker zum Belichten gerne die Sensoren aus dem Tintenstrahldrucker nehmen. Die sind länger als die Magnetstreifen die ich so bekommen konnte. Da kann ich breiter belichten. Grüße, Jens
Jens schrieb: > ich möchte die Sensoren verwenden, da auch ein Schrittmotor mit Riemen > ein Umkehrspiel hat Hallo Jens, das kann man aber mit Sensoren an beiden Enden gut abfangen. Mit dem Encoder bzw. der Auswertung der "Strichelchen" halst Du Dir ordentlich ISR-Aufwand auf. Ich bin gespannt ... Bei 600dpi und ca. 20 cm belichtbarer Breite sind das immerhin 4.800 ISR-Ereignisse pro "Fahrt" - neben den sonstigen Berechnungen und der Datenschaufelei. Was macht ihr denn da für eine komische Umrechnerei von dpi in lpi? Rechnet ihr mit Ton-/Grauwertstufen? @ Richard: Richard schrieb: > Die Filme sind nicht vom Bauriedl, Von wem sind die Filme denn? Bietet diese Firma eine bessere Auflösung - und wenn ja, welche? Grüße Dieter
Mich interessieren die Ergebnisse auch, ich arbeite auch noch am XY-Portal. Den Laserschlitten möchte ich aber mit DC-Motor antreiben weil das vibrationsfrei sein müsste. Schrittmotor hat natürlich den Vorteil das man damit besser Vektoren fahren kann. In einem Nachbarthread ging es um China Lieferanten mit Lager in EU, da wurde banggood.com genannt. Ich habe da mal als Suchbegriff 'Laser' eingegeben und man bekommt ein paar nette halbfertige XY-Laser Gravierer. Für den Preis kann man das kaum selbermachen, die Lieferung erfolgt aber von einem China-Warehouse: http://www.banggood.com/1500mW-Desktop-DIY-Laser-Engraver-Engraving-Machine-Picture-CNC-Printer-p-974159.html Dieter F. schrieb: > Was macht ihr denn da für eine komische Umrechnerei von dpi in lpi? > Rechnet ihr mit Ton-/Grauwertstufen? Die 150 lpi sind 150 lines per inch, das ist das Muster auf dem Encoderstreifen und die Auflösung der optischen Encoder. Wenn man den hell-dunkel und dunkel-hell Übergang nutzt um einen Punkt zu drucken hat man 300 dpi. Und weil der optische Encoder zwei Signale liefert die um die halbe Strichbreite versetzt sind verdoppelt sich die Auflösung nochmal auf 600 dpi.
Hallo Jojo, Jojo S. schrieb: > Die 150 lpi sind 150 lines per inch Das war mir klar :-) Jojo S. schrieb: > Wenn man den > hell-dunkel und dunkel-hell Übergang nutzt um einen Punkt zu drucken hat > man 300 dpi. Und weil der optische Encoder zwei Signale liefert die um > die halbe Strichbreite versetzt sind verdoppelt sich die Auflösung > nochmal auf 600 dpi. ... und das wusste ich nicht. Danke für die Aufklärung. Das mit den China-XY-Engravern beobachte ich auch schon einige Zeit (ggf. für mein irgendwann geplantes Stencil-Projekt :-) ). Die Preise fallen immer noch - aber ich will ja eigentlich meinen Billig-Plotter irgenwann umrüsten ... Gruß Dieter
Hallo an alle, also ich habe mir diese Lasergravierer mal angesehen. Also ich halte davon nicht viel. Die Angaben die da gemacht werden stimmen mit Sicherheit nicht! Material: Edelstahl und Acryl. Das ist Alu und Acryl. Die Genauigkeit geben die mit 0,01mm an. Mit dem Aufbau ist das aber sicher nicht zu machen. Das ist ein rein rechnerischer Wert für die Software. So wie da der Riemen über die Rollen gelegt ist, ist das nie so genau. Ich mache für meinen Drucker den Aufbau ähnlich und weiß daher wo die Grenzen sind. Grüße, Jens
Jens schrieb: > Material: Edelstahl und Acryl. Das ist Alu und Acryl Hallo Jens, so eng darfst Du das nicht sehen. Die meinen wahrscheinlich die Schrauben und die Führungsstange mit Edelstahl :-) ... oder nur die Schrauben ... oder eine Unterlegscheibe ... oder an dem Tisch, auf dem das Teil steht ist etwas Edelstahl verbaut ... oder ... Die Genauigkeit wird wahrscheinlich aus der Schrittweite der Motore etc. errechnet - sehe ich auch so. Umkehrspiel gibt es in China nicht! Das ist eine Anweisung des großen Vorsitzenden. Gruß Dieter
Hallo, so ich habe die ersten Tests gemacht mit den Encodern. Ich habe sie bis zu einer Frequenz von 30kHz getestet. Bisher kein Problem. Bilder stelle ich noch ein. Diese Frequenz entspricht einer Geschwindigkeit des Schlittens von etwas mehr als 5m/s. Das sollte reichen. Wenn man nur rausbekommen könnte von welcher Firma die Encoder sind. Ich finde es nicht so schön Bauteile zu verwenden, die ich aus anderen Geräten ausschlachten muss. Kennt sich da jemand aus? Grüße, Jens
weiter oben in diesem Thread hatte ich schonmal geschrieben wo ich meine gekauft habe: Beitrag "Re: UV-Laserdrucker II" http://www.digikey.de/product-detail/de/0/516-3036-ND Aus dieser HEDS Serie von Avago gibt es sehr viele Varianten, aber DigiKey hat nur einen Bruchteil davon am Lager. Der 150 LPI Typ scheint ein Standard Teil zu sein. Die meisten sind noch für 5 V, die 3,3 V Typen sind leider auch nicht zu bekommen. Die Avago Teile gibt es auch bei Mouser in höheren Auflösungen, da hatte ich aber noch nicht bestellt und man braucht ja auch noch das passende Streifenband dazu. Die Preise sind ähnlich, knappe 12 € ohne Steuern. Ganz schön happich wenn man bedenkt das das schon 1/4 des Preises für einen neuen Tintenstrahldrucker ist...
Hallo, die optischen Encoder machen nur Sinn, wenn man die Streifen günstiger bekommt. Das ist ja das was ich noch testen wollte ob man sich Streifen drucken lassen kann. Das kommt aber auf die Auflösung an, was die können. Wenn das nicht geht, dann bleibe ich bei den magnetischen Encodern. Da kosten die Streifen um die 8€. Auch noch teuer, aber was will man machen... Die Teile von Avago sind auch sehr teuer bei digi key. 12€ pro Stück ist schon der Hammer! Alternativ kann man natürlich das auch so machen wie Dieter gemeint hat, dass man einfach die Schritte von den Motoren nimmt um den Laser zu positionieren. Da kann man schon deutlich Geld sparen. Bei meiner Version 1 mache ich das auch so. Da habe ich aber auch gemerkt, dass das nicht das Optimum ist. Daher will ich das auch mit Encodern machen. Gruß, Jens
Jens schrieb: > Diese Frequenz entspricht einer Geschwindigkeit des Schlittens von etwas > mehr als 5m/s. Hallo Jens, wenn ich Jojo richtig verstanden habe muss ich Dich korrigieren. Bei 600dpi entsprechen 30kHz 1,27m/s - wird aber vermutlich auch reichen :-) Ob euch die 600dpi generell als Auflösung ausreichen ist eine andere Frage. Je höher die Auflösung desto wenige störend / auffällig ist das Aliasing. Bei 600dpi wackelt das ganze ca. +/- 1 mil (wenn ich richtig gerechnet habe) also im ungünstigsten Fall 2 mil zu wenig oder zu viel pro Bahn oder Abstand. Bei Hobby-Auflösungen so bis 10 oder 8mil fällt das, denke ich, nicht besonders ins Gewicht. Bei meinen Spielereien - und nichts anderes ist/war das - stört es dann schon, ist aber praktisch nicht relevant. Grüße Dieter
Hallo Dieter, nein, da hast du dich verrechnet. ;-) 5m machen 196,8inch. Und bei 150lpi macht das 29527 lines. Also etwa 30kHz wenn ich das in einer Sekunde fahre. Aber in der Wirklichkeit wird man diesen Wert nie erreichen können. Ich bin heute Nachmittag wieder mit meiner Hardware beschäftigt. Ich hoffe, dass ich meinen Schlitten und den Vorschub fertig bekomme. Dann gibt es endlich Fotos. Grüße, Jens
Jojo S. schrieb: > Die 150 lpi sind 150 lines per inch, das ist das Muster auf dem > Encoderstreifen und die Auflösung der optischen Encoder. Wenn man den > hell-dunkel und dunkel-hell Übergang nutzt um einen Punkt zu drucken hat > man 300 dpi. Und weil der optische Encoder zwei Signale liefert die um > die halbe Strichbreite versetzt sind verdoppelt sich die Auflösung > nochmal auf 600 dpi. Jens schrieb: > 5m machen 196,8inch. Und bei 150lpi macht das 29527 lines. > Also etwa 30kHz wenn ich das in einer Sekunde fahre. Hallo Jens, wenn du mit 600dpi arbeiten möchtest - und so habe ich das verstanden - dann musst Du alle 4 Signale auswerten - und damit reduziert sich die erzielbare Strecke auf 1/4. 30kHz - ja - aber bei 600dpi (und somit 600 auszuwertenden Signalen pro Inch) schaffst Du damit 50 Inch/s = 1,27 m/s. Wenn Dir aber 150dpi ausreichen, dann stimme ich den 5m (genauer 5,08m) zu :-) Grüße Dieter
@Dieter Das ist eine Druckerei welche noch mit CTF Arbeitet. Belichtet wird mit 3810 dpi. Deswegen habe ich (um die) 4000 dpi Geschrieben. Brauchst du die Adresse? LG, Richard
Hallo Dieter, da reden wir aneinander vorbei. Die 30kHz habe ich auf das Sensorsignal bezogen. Das sieht bei 30kHz noch sehr gut aus. Die Sensoren machen also 5m/s. Ob da der Controller noch die Ausgabe machen kann ist eine andere Sache. Da stimme ich dir zu, der muss dann die Daten mit 120kHz (ich will ja die 600dpi) ausgeben können. Das wird eng bis gar nicht machbar sein. Auch wird man die Beschleunigung bis auf die Geschwindigkeit nicht auf die kurze Strecke hin bekommen. Ich wollte nur verdeutlichen. Der Sensor ist nicht das begrenzende Bauteil. Grüße
Hallo Jens, verstanden :-) - da haben wir wirklich aneinander vorbeigeredet. Bin gespannt auf die Bilder. @Richard: Die Adresse brauche ich erstmal nicht - schön wären halt Bilder der Filme (auf denen man die Linien/Abstände erkennen kann mit Referenz - z.B. die Cent-Münze), damit man die Qualität beurteilen kann. Grüße Dieter
Ich verfolge das Thema nun seit dem ersten Posting aus dem Jahr 2011 allerdings erst sein einigen Wochen, da mich die Leiterplattenherstellung als alter Bastler besonders anspricht. Euren Entwicklungen, den DoitPostings bzw. Diskussionen darüber muß ich einfach mal meine Hochachtung aussprechen. Ich hätte nie gedacht, wie aufwendig so eine Sache im Detail ist, wieviel Aufwand ihr da reinsteckt und welche Grenzgebiete dabei berührt werden.( Grafikerstellung / Optik Mechanik Elektronik ). Man kann teilweise mit Euch mitfühlen, wenn einen Rückschläge das Hobby vermiesen oder wenn Erfolge Euch wieder voranbringen. Ich selbst habe mich noch nicht zu einer Lösung entschieden und bin erst mal in der Problemfindung, ob ich mir das überhaupt antue und wenn ja, welche Variante ich bevorzugen würde. Macht weiter so. Vielen Dank. LG Bernd
Angehängte Dateien:
-

20150914_190613.jpg
250 KB -

20150914_190630.jpg
240 KB -

Gebersignal.BMP
38 KB

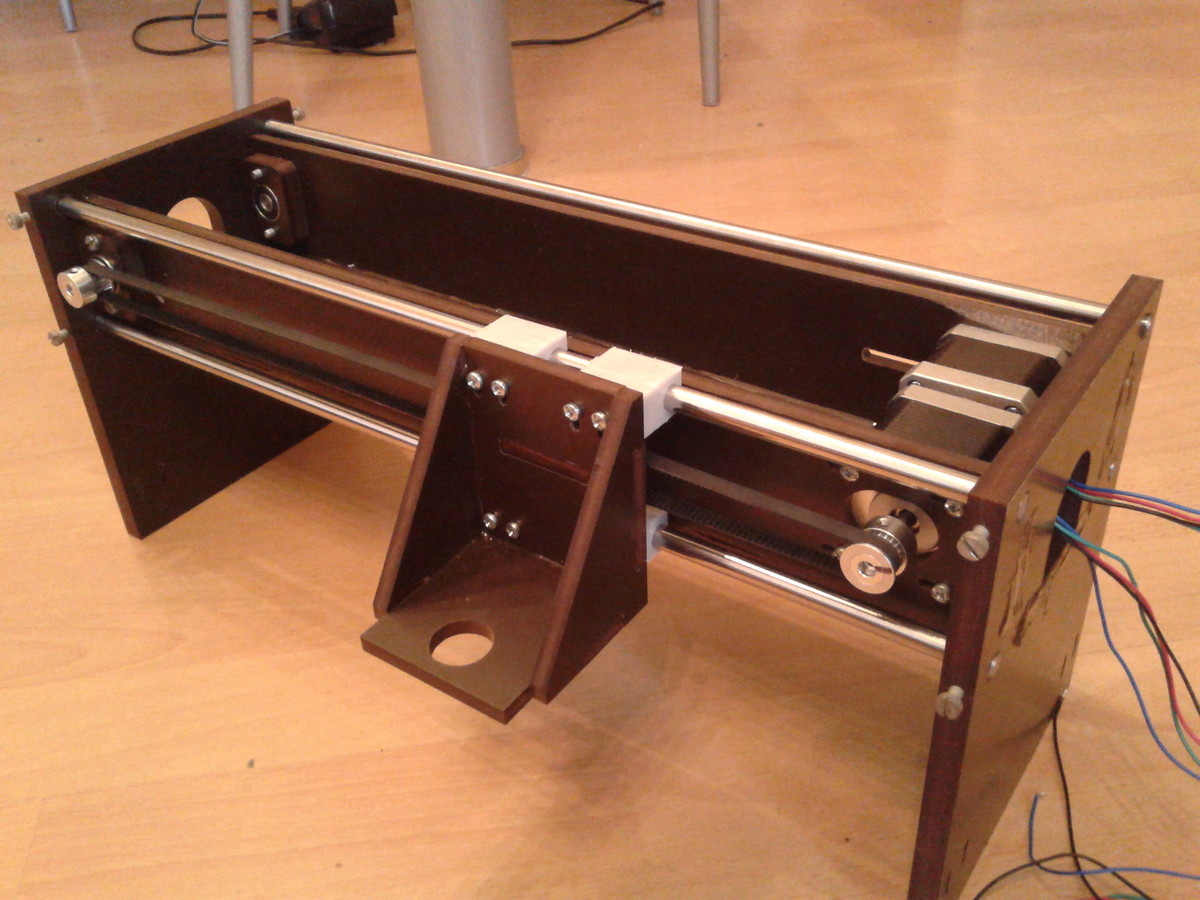
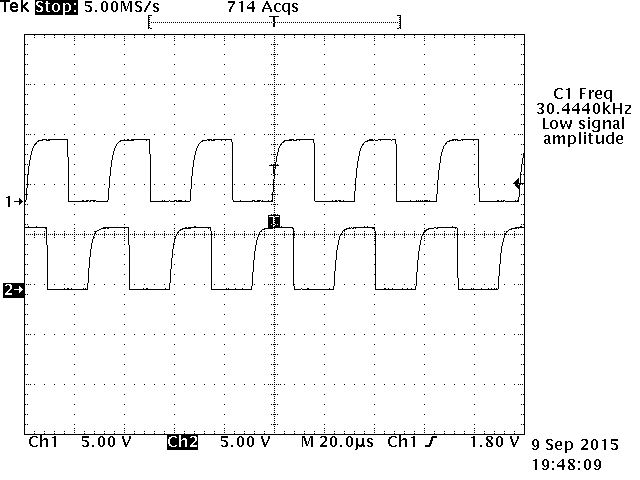
Hallo an alle, ich bin wieder dran. Ich habe euch ein paar Bilder gemacht von meinem jetzigen Hardwarestand. Das ist der Querschlitten, der den Laser trägt. Wer genau hin schaut sieht, dass auf der Rückseite nochmal eine Gleitschiende ist, an der später die Bohrspindel befestigt wird. Das kommt aber erst wenn der Rest läuft. Die ganze Schiene wird dann auf der Längsachse montiert in deren Mitte dann das Maschinenbett ist. Da werden dann die Platinen befestigt. Zusätzlich noch das Bild von den optischen Gebern bei 30kHz. Ob ich den verwende weiß ich noch nicht. Die 600dpi sind mir vielleicht doch zu wenig. Mal sehen. Wenn ich den magnetischen Encoder nehme habe ich bei voller Auflösung 1016dpi und wenn ich das halbiere bin ich bei 508dpi. Das ist dann genauso viel wie aus dem Video bei Youtube (in der schnellen Version). Da wurden auch nur 500dpi verwendet. Der Schlitten läuft schön leicht und ohne Spiel. Grüße, Jens
das sieht doch schon gut aus, der Encoderstreifen ist aber noch nicht dran? Und wegen Auflösung: die Drucker interpolieren die echten 600 dpi doch auch grosszügig noch 4 oder 8 fach. Die grosse Masse des Schlittens soll doch nicht mit 1 m/s laufen, ich würde so von 20...100 mm/s ausgegen. Bei 100 mm/s oder ca. 4 Inch/s sind das dann 4 * 600, also ca. 2,5 kHz oder 4 ms. Da kann man doch locker noch einen Punkt zwischensetzen. Bei konstanter Geschwindigkeit ist der Fehler sehr gering weil ja mit jedem Strich des Encoderstreifens wieder synchronisiert wird.
Hallo Jojo, nein, der Encoder ist noch nicht dran. Ich muss erst noch ein bisschen Software portieren bis die Schrittmotorendstufen wieder funktionieren. Ich hatte ja alles mit dem ATXMega gemacht bei meiner Version 1. Ich bin aber auf einen 32bit Controller umgestiegen bei meiner Version 2. Die Geschwindigkeit, die ich anpeile liegt bei etwa 40cm/s. Das würde bei den Pixeln dann etwa 10kHz ausmachen. Das ist auch noch nicht viel für den Controller. Aber interpolieren will ich da noch nicht. Erst muss ich mal sehen wie die Ergebnisse so aussehen. Tunen kann man dann noch im Nachgang. Grüße, Jens
Jens schrieb: > Ich habe euch ein paar Bilder gemacht Hallo Jens, welches Material verwendest Du denn da? Erinnert irgendwie an Bakelit ... Sieht sehr gut aus - und wenn ich die Langlöcher sehe, weiß ich auch wieder was ich nicht kann :-( Bin auf den Fortschritt sehr gespannt. 600dpi (sauber "auf den Punkt gebracht") sind schon sehr viel - mehr wie ein Hobbyist benötigt. Für Spielereien kann es auch mehr sein - aber nur dafür. Aktuell denke ich immer wieder mal über das Aliasing und mögliche "Gegenmaßnahmen" nach. @Bernd: Schön, dass sich mal wieder ein Mitleser "outet". Und vielen Dank für den Denkanstoß - habe die alten Threads nochmal überflogen und bin auf eine Äußerung wosnets bezüglich der Polygonspiegelmotor-Drehzahl gestoßen, die ich nachprüfen werde. Vielleicht kommt mein (immer noch leicht vorhandenes) "Gezackere" wirklich von einem "unrunden Lauf" aufgrund zu geringer Drehzahl. Bei Gelegenheit werde ich mal auf die Original-Drehzahl des LJ 4 erhöhen und das Ergebnis posten. Vielleicht ist das wirklich die Ursache ... Gruß an alle Dieter
Hallo Dieter, das Material ist Hartpapier. Das kann man in Platten kaufen und lässt sich sehr schön bearbeiten. Das einzige Problem ist, dass es beim Verarbeiten ein bisschen streng riecht. Aber das geht ja weg. :-) Das mit der Geschwindigkeit von deinem Spiegelmotor ist interessant. Hast du das schon testen können? Da bin ich auf das Ergebnis gespannt! Grüße, Jens
Jens schrieb: > das Material ist Hartpapier. Hallo Jens, ahhh - PERTINAX :-) - ich wusste gar nicht, das es das auch in solchen Stärken gibt. Du hast eine Fräse (glaube ich gelesen zu haben) - oder? Damit kann man natürlich tolle Ausschnitte und Langlöcher etc. machen (ist mein Neid spürbar ... ?). Sieht wirklich gut aus - ich fürchte, wenn ich mal meinen nächsten Entwicklungsschritt fertig habe muss ich den Weichzeichner bemühen ... Aber interessant, das Hartpapier gibt es auch in schwarz in div. Stärken. Müffelt zwar etwas und ist auch nicht unbedingt gesund (die Dämpfe - insbes. bei der Bearbeitung - also Vorsicht ...), sieht aber gut aus und ist damit ein Kandidat für mein späteres Außen-Gehäuse / -Verkleidung :-). Alu ist langweilig - und für mich nur schwer zu bearbeiten. Habe mich trotzdem entschieden, mit sog. "Bosch"-Profilen anzufangen und das Ganze erstmal als Gerüst aufzubauen. Das schaffe ich ggf. (hoffentlich) sogar mit meinen 2 linken Händen. Ich plane 3 Ebenen. Ganz unten Elektronik und Schrittmotor für die Schublade, in der Mitte die Schublade und oben die Polygonspiegel-Lasereinheit. Für die Schublade werde ich 1 (ein) Linearlager (rechteckige Schiene) verwenden. Sollte reichen, da keine mechanische Belastung entsteht. Ich werde das Ganze praktisch (nur mit einer sehr groben Zeichnung) angehen, da ich das sowieso nicht vernünftig und korrekt gezeichnet bekomme. Werde mich also herantasten ... Dauert aber alles noch ... Ggf. schaffe ich es am Wochenende, die Drehzahl mal hochzuschrauben - mal schauen. @Richard: ??? Gruß Dieter
Hi, da ich doch nicht so gefordert bin :-) geht meine Planung voran. Um ausreichend Platz zu haben werde ich 30 x 25,5 cm (zuzüglich Verkleidung/Gehäuse) benötigen. Ich könnte auf 28 x 25,5 cm reduzieren, aber das bringt jetzt auch nicht so viel :-). Das Ganze wird ca. 12 cm hoch werden - also relativ kompakt :-) - jeweils Außenmaße. Meine belichtbare Fläche wird (wie geplant) doppeltes Europakartenformat haben. Das reicht für mich vollkommen aus - ich habe noch nie so groß entwickelt (6 * 6 cm war bisher die größte Platine). Ich werde doch 2 Linearschienen verwenden, da mir eine etwas zu wacklig (theoretisch) erscheint. Ein wenig gezeichnet habe ich (GsD) auch - sonst hätte ich wohl einen entscheidenden Fehler gemacht. Vermieden und froh ... das größte Problem wird wohl der Tisch / die "Belichtungs-Platte" werden, da diese recht genau gefertigt werden muss. Mal schauen ... (wie mein Brüderchen so drauf ist :-) ) Grüße Dieter
Die Idee mit der Schublade für die Y-Achse finde ich richtig gut und werde das auch erstmal so machen. Ich wollte den Laserschlitten eigentlich auf ein fahrbares Portal setzen, aber das ist aufwändiger. Ich habe so eine Igus DryLin Linearführung, da reicht erstmal eine für einen Tisch in Eurokartenformat: http://www.igus.de/wpck/1856/DryLin_T_Einstellbares_Spiel Als Baumaterial für den X-Achsenaufbau nehme ich 15 mm Multiplexsperrholz, später vielleicht mal eine Version2 in Alu.
Angehängte Dateien:
-

IMG_2030.JPG
250 KB
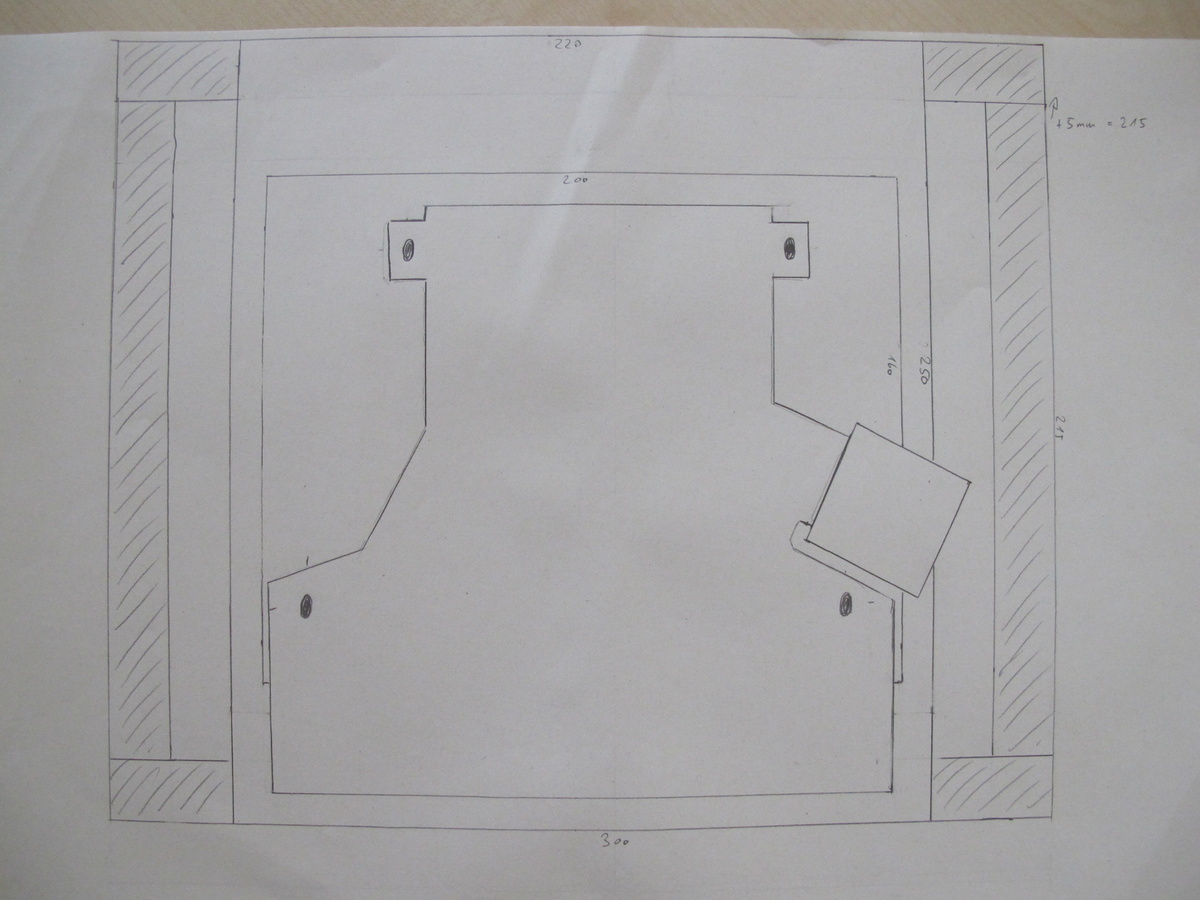
Jojo S. schrieb: > Ich wollte den Laserschlitten > eigentlich auf ein fahrbares Portal setzen, aber das ist aufwändiger. Hallo Jojo, eigentlich nicht :-). Meine aktuelle Version nutzt einen alten Scanner als Basis. Das ist relativ einfach (sogar für Leute mit 2 linken Händen wie mich) - benötigt halt auch den Platz für einen Scanner. Die Original-Abdeckung kann ich nicht nutzen - müsste also auch ein Gehäuse um die Scanner-Plattform herum bauen (wie tixiv). Das möchte ich aber nicht. (Übrigens schön, wieder mal einen "Mitbauer" zu haben :-) ) Daher die Idee mit der Schublade. Damit kann ich die benötigte Stellfläche verkleinern und habe gleichzeitig die erforderliche Sicherheit, damit niemand aus Versehen in die Laserstrahlen schauen kann. Ich habe für den Rahmen Alu-Profile von hier http://www.alu-profil-technik.de/product_info.php/info/p14_aluprofil-20-x-20-nut-6.html bestellt (die schneiden auf Fertigmass zu und sind nicht zu teuer). Die Linearführungen (Deine Version wäre mir für einen ersten Versuch zu teuer) habe ich in China bestellt http://de.aliexpress.com/item/Free-shipping-for-9mm-Linear-Guide-MGN9-L-250mm-linear-rail-way-MGN9C-or-MGN9H-Long/32323804779.html und hoffe, das die ausreichen. Falls nicht werde ich mich halt hier noch mal umschauen. Platz habe ich ausreichend vorgesehen. An bei eine "Bleistift-CAD"-Skizze (grob) des geplanten Aufbaus. in der Mitte die Polygonspiegel-Einheit (wird auf 2 Querstreben gelagert, die hier nicht eingezeichnet sind. Darunter die Schublade mit 220 x 250 mm. Die Platte soll aus Alu (final) sein. Die Belichtungsfläche 200 x 160 mm werde ich 1,5 mm tief ausfräsen (mein Bruder :-) ) lassen. Die Platte ist etwas größer, wie unbedingt notwendig. Grund ist der Spiegel der Polygonmotor-Einheit, welcher den Strahl nicht senkrecht nach unten ablenkt, sondern (bei meiner Einbauhöhe) schräg ca. 3 cm nach innen ablenkt. Könnte eine Anpassung versuchen - aber bei meinem Geschick spare ich mir das lieber :-) Außen herum der Rahmen (schraffiert). Ich werde vorne unter den Schlitten noch eine kleine Laufrolle (ggf. ein kleines Kugellager) auf den Rahmen setzen, damit die Linear-Schlitten nicht so stark belastet werden. Über eine Verkleidung (Hartpapier ?) mache ich mir später Gedanken. Wie geschrieben 3 Ebenen a 40 mm Höhe: Unten die Elektronik und der Antrieb, in der Mitte die Schublade und oben die Polygonspiegelmotor-Einheit. Ich hoffe, ich werde wegen der laienhaften Zeichnung nicht allzu sehr ausgelacht :-\ - ist mir aber eigentlich auch egal. Vermutlich werde ich ein wenig Lehrgeld zahlen, weil nicht alles so funktioniert wie geplant - aber der Weg ist das Ziel :-) Gruß Dieter
Dieter F. schrieb: > (Übrigens schön, wieder mal einen "Mitbauer" zu haben :-) ) gerne, ich bin da aber nicht der schnellste, mein Reflow Ofen hat drei Jahre gestanden bis ich damit mal eine Platine löten konnte... Die Igus Teile sind nicht billig, aber die Qualität ist sehr gut soweit ich das beurteilen kann. Mit den low cost China Teilen habe ich wenig Erfahrung und noch keine gute Bezugsquellen, deine Links habe ich schonmal gespeichert. In einem anderen Webshop, 'Hexacube', habe ich noch Kunststoff Gleitlager gekauft. Auch Igus wenn die Original sind aber günstiger als die DryLin Schienen. Ich habe jetzt ein bisschen im RepRap Forum gelesen, da gibts auch gute Tipps. Dieter F. schrieb: > Die Belichtungsfläche 200 x 160 mm > werde ich 1,5 mm tief ausfräsen In der 4ma haben wir einen professionellen 30 W Laser zum schneiden und gravieren, da wird eine Silikonmatte als Unterlage verwendet. Flaches Material wie Folien oder Platinen haften darauf absolut rutschfest, als Haftmittel kommt wenn nötig noch etwas Silikonspray drauf. So Matten bekommt man für ein paar Euro als Küchenzubehör: http://www.cardin-deko.de/Silikonmatten-Formen/Silikonmatten/Silikonmatte-glatt-30-x-40cm::287.html Freitag habe ich ein bisschen mit dem Laser gespielt, wie stellt ihr den Fokus da ein? In weisses Papier brennt der sofort Löcher rein, weisse Pappe sieht besser aus aber um den Laserpunkt ist eine richtige Corona, da ist optimale Fokus schwer zu erkennen. Ich kann die Laserleistung noch nicht nicht runterdrehen (das Lasermodul hat einen fixen Schaltregler), als nächstes muss ich wohl erstmal den Lasertreiber bauen.
Jojo S. schrieb: > wie stellt ihr den > Fokus da ein? Hallo Jojo, das mit der Geschwindigkeit ist kein Problem - ich bin seit 2013 dran :-) Aber ich weiß nicht so recht (nachdem ich ein wenig "zurückgelesen" habe), wie Du Dir das mit der Schublade vorstellst. Du planst doch eine "Plotter-ähnliche-Lösung" oder? Nichts mit Polygonspiegelmotor .... denke ich - oder? Na, egal. Für die Fokus-Einstellung gibt es verschiedene Ansätze, z.B. mit USB-Mikroskop etc. Für mich hat sich - nach einigen Versuchen - die Methode "brenne einen Punkt bei definierter Leistung in ein Blatt Papier als praktikabel erwiesen. Geht aber nur, wenn Du die Laser-Leistung steuern kannst. Bei der Polygonspiegel-Lösung sollte man (aus meiner Erfahrung) vorher den Fokus-Punkt optimal (in Richtung quadratisch) einstellen. Die Corona / der Lichthof spielen im Vergleich zur Intensität des Fokuspunktes (Brennpunktes) keine (entscheidende) Rolle. Das ignoriere ich einfach ... Gruß Dieter
Angehängte Dateien:
-

IMG_2031.JPG
230 KB
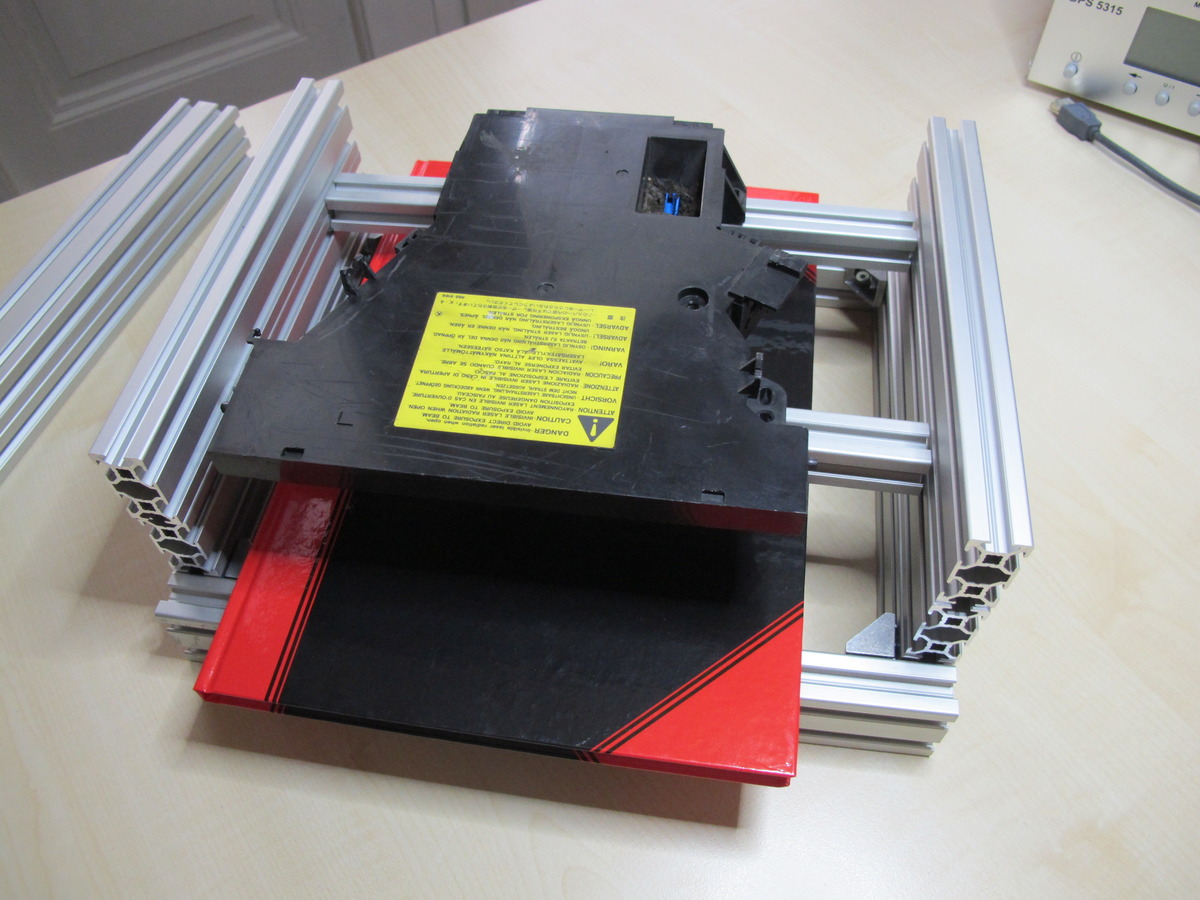
Hi, Spielzeug Teil 1 ist angekommen :-) Super-schnelle Lieferung. Freitag Nachmittag bestellt und heute morgen angeliefert. Prima Qualität (hätte ich im Leben nicht so exakt schneiden können). Anbei eine kleine, provisorische Impression. Die Lasereinheit kommt noch etwas tiefer (8 mm) - da fehlen noch die Winkel. Das Buch symbolisiert die leicht ausgefahrene Schublade (mein Bruder macht die - muss ihm nur die Maße vorgeben). Ist nur provisorisch zusammengesteckt - wollte mal das "3D-Gefühl" haben ... . Vorne und hinten kommen oben auch noch 2 Profilschienen hin.Den unteren Teil (unter der Schublade) trenne ich mit Alu-Lochblech ab - da kann man auch schön die Platinen etc. von unten montieren (und kommt von unten auch gut dran. Jetzt beginnt die lange Wartezeit auf die China-Teile. Da werde ich mich um die Platinen und den Antrieb für die Schublade kümmern. Gruß Dieter
Hallo alle, hier geht es auch wieder weiter. Ich habe jetzt den Reflexsensor im Griff und erhalte wie erhofft eine Wiederholgenauigkeit von besser +- 2 Steps, d.h. +- 12,5 µm. Das hat Zeit gekostet, weil ich zuerst probiert habe das Maximum als Referenzpunkt zu nehmen. Hier ist der Spannungsverlauf aber viel zu flach für ein reproduzierbares Ergebnis. Jetzt suche ich erst das Maximum und fahre dann soweit zurück, bis die Spannung auf 4/5 des max. Wertes abgefallen ist. In diesem Bereich ist die Steilheit des Verlaufs maximal und so kann ich auf vorher getestete Tricks wie Mittelwertbildung u.ä. verzichten. Grüße, Guido
Hallo Guido, das hört sich sehr gut an! Könntest du das mal aufzeichnen wie du das gemacht hast und welche Sensoren das sind. Das wäre super! Viele Grüße, Jens
Guido B. schrieb: > Wiederholgenauigkeit von besser +- 2 Steps, d.h. +- 12,5 µm Hallo Guido, wie misst Du das denn? Würde mich auch für meine Versuche interessieren ... Gruß Dieter
Dieter F. schrieb: > wie misst Du das denn? Würde mich auch für meine Versuche interessieren Ich suche den Referenzpunkt, fahre gegen den mechanischen Endschalter und zähle hierbei die Schritte. Das erfolgt vielfach nacheinander und ich sehe eine Abweichung von bis zu 3 Schritten (durch Warmlaufen?). Jens schrieb: > das hört sich sehr gut an! > Könntest du das mal aufzeichnen wie du das gemacht hast und welche > Sensoren das sind. Sensor ist der GB2S05, der leuchtet von der X-Achse auf einen Teil der Halterung. Der Ausgangstransistor des Sensors wird als Stromquelle verwendet und liefert über einen 22k-Widerstand mit folgendem Emitterfolger die Spannung an einen ADC-Eingang des Kontrollers. Soweit verständlich? Grüße, Guido
Guido B. schrieb: > Ich suche den Referenzpunkt, fahre gegen den mechanischen Endschalter > und zähle hierbei die Schritte. Hallo Guido, jetzt bin ich doch überrascht ... Ich hätte z.B. eine sehr spitze Nadel in Bezug zu einem Mikro-Strich oder ähnlich erwartet - aber ein mechanischer Endschalter als Referenz? Die Dinger habe ich von vorneherein verworfen, da zu ungenau - zumindest in der für mich akzeptablen Preisklasse. Welche Teile verwendest Du denn? Wenn die so genau sind, wozu dann noch zusätzlich eine optische Lösung? Ich bin etwas verwirrt ... Gruß Dieter
Hallo Dieter, die Endschalter sind Schnappschalter, die waren an dem Maschinchen schon verbaut. Neu sind die schon auf 1, 2 Hunderstel genau, ich befürchte aber dass dies durch Verschleiß schlechter wird. Deshalb werde ich sie (abgesehen von der Z-Achse) nur als echte Endschalter mit negativen Koordinaten und Zwangsabschaltung der Stepper verwenden. Zum Testen sind die aber ganz o.k., so dass ich mir einen Aufbau mit Messuhr sparen kann. Grüße, Guido
Guido B. schrieb: > GB2S05 GP2S05 (P statt B) Hi, habe nochmal ins Datenblatt geschaut. Wie bekommst Du denn diese Genauigkeit (+- 12,5 µm) bei den Werten incl. Temperaturabhängigkeit hin? Da ändert (überzogen :-) ) 1/50 Fliegenschiss auf der Reflektionsfläche die Situation enorm. Du musst ja dann auch die Mess-Spannung / Referenzspannung sehr exakt einhalten etc. Ist jetzt nicht böse gemeint, aber ich habe da schon so viel Zeit in die Tonne gehauen - ohne wirklichen Erfolg ... :-( Kannst Du Deinen Versuchsaufbau mal schildern und zeigen? Gruß Dieter
Guido B. schrieb: > mir einen Aufbau mit Messuhr sparen Hallo Guido, sorry - hat sich überschnitten. Habe beim Schreiben zu lange überlegt ... . Ah - o.k. - das mit den Schaltern habe ich verstanden. Die Genauigkeit würde mir eigentlich voll ausreichen - im Netz werden Schalter mit 1 µm als "non plus ultra" beworben. Mal abgesehen davon, dass ich keine Messuhr (und auch keine so präzisen Schalter) besitze ... werde ich wohl irgendetwas ähnliches wie die Nadel-Methode anwenden. Bisher ist mir nichts besseres eingefallen. Ich habe hier einen Test-Streifen von meinem Billig-USB-Mikroskop, den ich dafür einsetzen werde. Gruß Dieter
Angehängte Dateien:
-

Sensor.jpg
69 KB
Hallo Dieter, danke Für die Korrektur der Sensorbezeichnung. O.k., mal etwas ausführlicher: Der Aufbau ist nicht spektakulär, siehe Sensor.jpg. Der GP2S05 ist mit einem Alublech am Kreuztisch befestigt und fährt mit der X-Achse mit. Sein Ausgangsstrom variiert mit dem Abstand zum Aluminium der Halterung. Den Verlauf der mit dem µC gemessenen Spannung in 10 Bit hänge ich als steps.pdf an. Zum Beginn messe ich die Spannung vom Sensor, liegt die über 300 Digits, fahre ich 10 mm nach rechts. Anschließend bzw. sonst fahre ich nach links, messe während der Fahrt mit jedem Schritt die Spannung, bis sie über 500 Digits liegt. Jetzt hat der Sensor sicher die Halterung erfasst. Dann geht es in Zehnerschritten weiter, nach den je 10 Schritten wird der Schrittmotor abgeschaltet (/Enable = 1), 10 ms gewartet und wieder gemessen. Hierbei wird der maximale Wert der Spannung erfasst, er liegt um 820. In Zehnerschritten weiter, bis die Spannung wieder abfällt. Zuletzt geht es in Einzelschritten zurück, nach jedem Schritt wird mit abgeschaltetem Stepper gemessen, bis der Spannungswert auf 4/5 des Maximalwertes gesunken ist. Wie geschrieben klappt das auf wenige Schritte reproduzierbar. Genauer brauche ich das nicht, da hinterher ja eh nur noch Schritte gezählt werden. Messuhr hätte ich sogar da, gibts bei Ebay ja günstig, habe aber keine Lust eine Halterung zu bauen. Grüße, Guido
Guido B. schrieb: > Wie geschrieben klappt das auf wenige Schritte reproduzierbar Hallo Guido, wie geschrieben kann ich die Reproduzierbarkeit nicht so recht nachvollziehen - ist aber egal, werde ich auch mal ausprobieren. Packe ich auf meine nächste "Reichelt-Wishlist" und wenn ich genug zusammen habe bestelle ich. Werde parallel noch mit den Gabellichtschranken experimentieren und mir das optimale Teil aussuchen. Wenn der Bereich zwischen 750 und 450 so linear ist, wäre das ideal. Im Datenblatt sehe ich da keine Linearität (bin aber ü50 und sehe entsprechend schlecht) - ergo bin gespannt. cu Dieter
Hallo Dieter, ü50 bin ich auch, sehe nach doppelter OP aber wieder Prima. :-) Habe gerade die Y-Achse ebenso referenziert, bei dieser leuchtet der Sensor auf eloxiertes Aluminium. Die Spannungswerte sind hierdurch fast halbiert, das Verhalten aber identisch. Ich hatte schon in Erwägung gezogen den Reflexionspunkt zu schleifen und polieren oder mit Alufolie zu bekleben, das ist aber definitiv unnötig. Trotz der fast halbierten Auflösung ergeben sich in wiederholten Versuchen max. 3 Schritte Differenz gegenüber dem mechanischen Endschalter. Völlig ausreichend IMHO. Grüße, Guido
Angehängte Dateien:
-

20150927_083450.jpg
250 KB
Hallo an alle, ich kann mal wieder einen kleinen Zwischenstand geben: Die Schrittmotoren laufen. Mir ist es nun gelungen die Treiber auf die neue Plattform zu portieren. Beim AVR32 sind einige Sachen ganz anders gelöst als beim XMega. Das hat ein bisschen gedauert. Auf dem Foto sieht man wie die Elektronik aussieht. Das Video soll einen kleinen Eindruck geben wie die ganze Mechanik bei mir zusammen spielt. Die selbstgebauten Führungsschienen laufen super. Da wackelt nichts und billig waren die auch. Wenn ich das hoch rechne kostet mich eine Achse etwa 5€. Bei der Geschwindigkeit müsste noch einiges gehen. Ich betreibe den Motor gerade mal mit 0,5A. Weit weg von dem was er kann. Aber die Tests was machbar ich kommen erst zum Schluss. Die nächsten Schritte sehen so aus, dass ich nun die restlichen Achsen fertig baue und die Mechanik fertig mache. Das wird aber ein bisschen dauern, da ich im Moment nicht so viel Zeit habe. Grüße, Jens
Angehängte Dateien:
-

Verhau2.JPG
64 KB
Uih Jens, das sieht ja aufgeräumt aus, bei mir siehe oben. :-( Wir verwenden wohl dieselben (chinesischen) Steppertreiber. Hast du die unmodifiziert gelassen? Ich habe den Trimmer rausgeschmissen, dem traue ich nicht, und die Referenzspannung separiert erzeugt. Auch waren die Sense-Widerstände mit 0,1 Ohm bestückt, wodurch die Vergleichsspannung außerhalb der Spec liegt. Ich habe jeweils zwei 1,0 Ohm aufeinander gelötet. Grüße Guido
Hallo Guido, ich verwende den DRV8825. Den kaufe ich als komplettes Modul. Das wird der gleiche sein wie bei dir. Die gibt es durch die 3D Drucker so günstig, da mache ich das nicht mehr billiger selber. Ich lasse den so wie ich ihn gekauft habe. Welche Spannung meinst du denn die außerhalb der Spec sein soll? Ich habe nochmal in das Datenblatt geschaut. Wenn du einen Shunt mit 0,5Ohm verwendest, dann ist dein Maximalstrom bei 1,3A. Wenn du weiter aufdrehst, dann wird die Spannung an Isense zu groß. Mit wie viel Strom betreibst du denn deine Schrittmotoren? Grüße, Jens
@Guido Guido B. schrieb: > Ich habe den Trimmer > rausgeschmissen, dem traue ich nicht, Gut, der kann nämlich nicht eigestellt werden. Und wie stellst du jetzt die RefSpannung ein? Als RefSpannung kannst ja 3,3 nehmen (Pin 15). Warum so kompliziert? @Jens Die Spannung stellst du mitn Strom ein. @beide Welche Motoren verwendet Ihr?
Ja, das sind bei mir auch die DRV8825-Module für 4 € beim Chinese, da kann man selbst nichts billiger machen und sie können einfach auf Lochraster verwendet werden. Meine Schrittmotoren sind 17HS3401 mit einem Maximalstrom von 1,3 A. Ich betreibe sie mit einem Maximalstrom von 1,0 A, das scheint zu reichen. Mit dem 0,1-Ohm-Widerstand bräuchte ich ein Vref von 0,5 V, was außerhalb der Specs liegt. Die 0,5 Ohm sind nicht optimal, ich habe aber auf die Schnelle keine passenden Widerstände unter 1,0 Ohm gefunden. Die Referenzspannung kommt über einen Spannungsteiler aus einem 7805, den ich für Sensoren und ADC eh brauche. So kann ich sie leichter anpassen, als wenn ich auf den Modulen rumlöten muss. Grüße, Guido
Hallo, @Guido ich weiß nun welche Spannung du meinst. Das ist der VREF Input. Da soll die Spannung bei 1V bis 3,5V liegen. Dann ist die Genauigkeit am besten. Funktionieren tut das aber auch mit niedrigeren Spannungen. Ich arbeite gerade mit etwa 400mV Referenzspannung. Dass sich die Potis nicht einstellen lassen ist bei mir nicht so. Aber man sollte wissen, dass die Teile keinen Endanschlag haben. Also bei einem kleinen Strom kann der auch schnell in die andere Richtung ausschlagen. Das ist nicht so schön. Klar, besser kann man das schon machen, aber ich verwende die erst einmal so wie sie sind und kümmere mich erst noch um die anderen Baustellen. Ob ich die Treiber nochmal anders aufbaue weiß ich noch nicht. Mal sehen wie viel Zeit und Lust ich dann noch habe. Als Motor verwende ich irgendeinen billigen China Motor. Die habe ich auf ebay gekauft und waren so das Billigste was ich finden konnte. Grüße, Jens
Wäre es nicht sinnvoll die Komponenten zu standardisieren? Um ~12 EUR gibts schon sehr gute 0,9° Stepper. @Jens Ich dachte du bist schon fertig!?
Jens W. schrieb: > Das Video soll einen > kleinen Eindruck geben wie die ganze Mechanik bei mir zusammen spielt. Hallo Jens, (war ein Weilchen nicht online ...) - sieht gut aus! Schluppt ja prima hin und her ... lt. Akustik genau wie bei Andreas. Ich frage mich, wozu der Motor auf der Rückseite gut ist - habe ich da was überlesen :-) Wenn ich das "Ritzel" mit ca. 11 mm Durchmesser annehme und von einem "normalen" NEMAxx-Motor ausgehe (200 Schritte pro Umdrehung) - und das dann mit den 32 möglichen Mikroschritten Deines Treiber-Moduls verknüpfe komme ich ich ca. 5 µm Auflösung. Ist das korrekt? Bitte nicht böse sein - ist nur ein Gedankenspiel, weil ich mir selbst nicht sicher bin - ich kann das gedanklich nicht in Gänze nachvollziehen. Du schreibst, dass kein (Umkehr-)Schlupf vorhanden ist. Hmm, wenn ich mir z. B. das https://www1.iwr.uni-heidelberg.de/fileadmin/groups/orb/templates/img/Publications/bsc-thesis-jschleicher.pdf und zusätzlich die Spezifikation eines NEMAxx-Schrittmotors mit ca. 5% Abweichung pro Schritt (nicht pro xx-Mikroschritt) anschaue habe ich damit ein Problem. Ich gehe davon aus, dass ein gewisses "Spiel" nicht vermeidbar ist. Ich denke ferner, ein Getriebe (ja, hat auch Spiel - da muss man sich halt jeweils Referenzpunkte an jedem Endpunkt suchen) hilft das etwas zu "entschärfen". Scanner-Hersteller etc. machen das ja scheinbar auch so - oder sehe ich das falsch? Ich bin an dieser Stelle wirklich gedanklich am "Schwimmen" ... gibt es dazu Ideen / Vorschläge (Aller/der Mitleser)? Gruß Dieter
Hallo Dieter, der Motor auf der Rückseite ist zum Bohren. Da kommt nochmal ein Schlitten hin. Zum Umkehrspiel: Das gibt es natürlich schon. Was ich mit spielfrei meinte sind die Führungen. Das heißt, der Wagen klappert nicht hin und her. Wenn der Wagen die Richtung ändert, dann ist da natürlich schon ein kleines Spiel. Das war auch das Problem bei meiner Version 1. Da musste ich das heraus rechnen. Die Auflösung, die du da ausgerechnet hast, das ist auch richtig. Ist aber ein rechnerischer Wert. Die feinen Stufen beim Microstepping sind nicht linear. Ich denke genauer als 1/8 Schritt wird man nicht mehr. Das ist aber sehr vom Motor abhängig. Wenn ich davon ausgehen, das die Riemenscheiben 20 Zähne haben und die Zahnteilung bei 2mm liegt kommt man bei 1/4 Schritt auf etwa 1200 dpi. Aber das muss ich erst noch vermessen. Wenn das so ist, würde ich auch keine Linearsensoren mehr verbauen. Das ist nicht mehr nötig. Im Moment bin ich aber über der Bohrspindel. Wenn man sich damit genauer beschäftigt, dann sind da auch mehrere Hürden zu meistern. Wie läuft es bei dir? Grüße, Jens
Hallo, Jens war jetzt etwas schneller (microstepping) :) Warum verbaut ihr keine 0,9° Step Motoren? Kosten gleich viel und sind noch etwas präziser. Jemand hat das schon mal gefragt, wollte aber nicht so unverschämt sein... Jetzt muss ich das auch fragen: Welcher Software verwendet ihr, ist open source und wo kann es heruntergeladen werden? Für die Steuerung möchte ich einen Mega oder Due verwenden. Noch jemand? @Dieter Ich habe deine Anfrage nicht vergessen. Bei der Vergrößerung ist da nichts mehr mit der Münze im Bild. LG, Richard
Hallo Richard, ich verwende diese Motoren weil sie für Microstepping geeignet sind. Da weiß ich dass das funktioniert. Die Motoren mit 0,9° kenne ich nicht. Und ob die dann mit dem Microstepping functionieren... keine Ahnung. Also das nehmen was erprobt ist. Software: Das ist so ein Thema. Also um es vorweg zu nehmen. Bisher ist das (was ich verwende) alles in eigener Regie entstanden. Also nichts ist open source und runterladen kannst du das auch nicht. Was ist denn Due? Ist das so ein Arduino-Verschnitt? Damit wirst du nicht weit kommen. Die Leistung die du für einen Drucker brauchst wirst du mit diesem Framework nicht hin bekommen. Grüße, Jens
Hallo Jens, Jens schrieb: > Die feinen Stufen beim Microstepping sind > nicht linear. Dein Motor ist ein 1,8° stepper. Ein 0,9° löst in FullStepMode 2x besser auf. Für die Mechanik nehme ich 0,9° stepper. Als Treiber nehme ich den A4988. Ja, der DUE ist ein Arduino Board. Allerdingst mit einem Cortex-M3 µC (3.3V). Wie haben sich das die Leute hier mitn (besser gesagt ohne) Software vorgestellt? LG, Richard
Jens schrieb: > Wie läuft es bei dir? Hallo Jens, ich bin gerade aus einem Kurzurlaub aus dem Katastrophengebiet Sardinien (!) zurück - habe also nicht viel getan. Warte auf die Linearführungen und werde in der nächsten Woche meine Schublade "designen". Bei meinen aktuellen Vorstellungen/Plänen wird das Teil ca. 2 kg schwer - zu viel für die Führungen. Werde also mehr oder weniger geschickt Löcher / Aussparungen vorsehen, um das Gewicht möglichst zu halbieren. Mit den Schrittmotor-/Sensor-Versuchen warte ich, bis die Schublade verbaut ist - sonst müsste ich mir etwas ähnliches bauen (mit meinen 2 linken Händen kein guter Gedanke). Evtl. werde ich den Schrittmotor-Treiber noch wechseln - mein A4988-Modul ist zwar klein aber auch recht "wackelig" in der Einstellung. Habe hier noch 3 TB6560-Module liegen, mit einem davon werde ich mal spielen. Auch werde ich in der nächsten Zeit noch - wie angekündigt, aber noch nicht ausgeführt - mit dem Polygonspiegel-Motor experimentieren und versuchen, den Jitter zu minimieren. Erstmal werde ich auf 24 V gehen (ist im Original so) um auszuschließen, das die "Probleme" von meiner 12 V Versorgung rühren. Mal schauen ... Deine Führungen sehen in der Tat schlupffrei aus. Ist wohl ein Kunststoff - habe ein optisch ähnliches Material mal bei meinem mechanisch begabten Bruder gesehen. Auch bei meinem Scanner-Schlitten sind Kunststoff-Buchsen verbaut und der arbeitet recht präzise. Ich bin weiter sehr gespannt (das mit der Bohrer-Seite hatte ich mir schon gedacht :-) - und bin nach wie vor skeptisch, ob sich das verträgt). Gruß Dieter
Richard schrieb: > Wie meinst du das? Da (auf dem Fertig-Modul) ist ein Mini-Trimmpoti für die Strom-Einstellung drauf, welcher nicht besonders linear reagiert. Nur mit Fingerspitzengefühl bekomme ich da eine vernünftige Einstellung hin. Ist halt ein China-Teil ...
Hallo Richard, du müsstest schon ein bisschen erklären was du brauchst. Willst du einen Drucker mit Spiegel oder mit Linearantrieb? Hast du schon angefangen was zu bauen oder planst du nur? Ganz ohne Aufwand wirst du da nicht zum Ziel kommen. Und da jeder Drucker immer anders ist wirst du nicht einfach was kopieren können und das soll auf Knopfdruck funktionieren. Wenn du das mit dem Due lösen willst, dann hast du da noch eine andere Platform. Das wird hier gar nicht verwendet, also passt gar keine Software hier. Die müsstest du portieren. Schaffst du das? Wie sind da deine Kenntnisse? Grüße, Jens
Ah, das hast du gemeint. Das weiss ich. Diese kannst du nicht einstellen. Für Micro Steps müssen Ströme ganz genau eingestellt sein. Das geht nur mit Trimmer mit Getriebe. Leider kosten die gleich 10x so viel.
Hallo Jens, Da ich auch andere Sachen machen möchte, kommt nur die Lösung mit Linearantrieb in Frage. Ich bin davon ausgegangen, das ich die Software alleine schreiben muss. Deswegen habe ich die Cortex-M3 ausgewählt. Diese bekommt man überall. Hätte ich Zugang zu (open Source) Software, würde ich eine andere µCU wählen. Software zu portieren zahlt sich für mich nicht aus. Zu viel Aufwand. Gebaut habe ich noch nichts. Ohne Laser und Führungsmechanik komme ich nicht weiter. Ist das hier brauchbar http://www.ebay.com/itm/300mW-Blue-Violet-Engraving-Cutting-405nm-Adjustable-Focal-Length-of-Laser-Head-/121755956358?hash=item1c59387486 ? Erst wenn ich ein Laser habe kann ich die Führungsmechanik angehen. LG, Richard
Hallo Richard, der Laser sieht gut aus. Aber ich kann dir nicht sagen ob der Fokus ausreicht. Das kommt auf einen Versuch an. Aber keine Bange. Wenn das zum Belichten nicht taugt, bekommst du das Teil bei ebay auch so wieder los. Ich habe mir BluRay Dioden gekauft und ein Gehäuse dazu. Die sind genormt und sind so 12x30mm groß. Meine Diode hat 120mW (ich hoffe das reicht mir aus) Die 300mW Diode die ich noch habe ist zum Belichten nicht geeignet. Die kann man nur als Pointer zum Spielen nehmen. In meinem funktionierenden Drucker habe ich eine 1W/445nm Diode drin. Also so wie ich dich verstehe willst du für die Achsen was fertiges nehmen. Suchst du vielleicht sowas: http://www.jtronics.de/avr-projekte/xmega-tinyg-cnc-controller.html Da würden sich die Achsen schon bewegen und du kannst alles per G-Code steuern. Dann kannst du den Cotex nehmen und dich nur noch um die Steuerung des Lasers kümmern. Ist das was? Grüße, Jens
Hallo Jens, Jens schrieb: > Also so wie ich dich verstehe willst du für die Achsen was fertiges > nehmen. Nein, ich will alles selber machen. Jens schrieb: > Die 300mW Diode die ich noch habe ist zum Belichten nicht geeignet. Welche ist das? LG, Richard
Hallo Richard, welche Diode das genau ist kann ich nicht mehr sagen. Die ist aus irgendeinem Gerät ausgeschlachtet. Die macht beim Fokus ein Problem. Intern ist die wohl nicht so toll aufgebaut und reflektiert ein Teil vom Strahl irgendwie diffus. Man hat eine richtig helle Korona um den Strahl. Für das Belichten ist das wahrscheinlich nicht zu gebrauchen. Ich werde die aber trotzdem mal einbauen und testen. Ich möchte bei der aktuellen Version auf 100mW BluRay Dioden gehen. Die bekommt man bei eBay recht günstig. Und die Wellenlänge passt auch gut zum Photolack von Bungard. Gruß, Jens
Hallo Jens, Ich verstehe noch nicht ganz genau wie Ihr (du) das mit der Daten handhabt!? Schickt Ihr die Gerber Daten direkt an den Belichter? LG, Richard
Darf ich jetzt laut denken? Ich hätte nämlich noch ein "Problemchen" ... Angenommen, ich will eine Auflösung von 1 mil haben. Pro mm hätte ich ~40 Zeilen. Wenn ich pro Zeile ~1 sec fürs Belichten brauche, sind das schon ~66 Minuten für eine 160 x 100 er Platine.
Da hast du recht. Daher muss man die Zeilen schneller abfahren und die Auflösung verkleinern. Die Spiegelmethode hat da klare Vorteile. Aber ist die Auflösung nötig? Ich schicke meine Daten zeilenweise an den Laser. Also Layout -> PDF -> Pixelarray -> Zeilendaten So mache ich das.
Jens schrieb: > Aber ist die Auflösung nötig? Die 1 mil Auflösung habe ich noch von den Filmbelichter im Kopf. Diese Auflösung wird so sicherlich nicht benötigt aber dann muss ich andereswo die Differenz nachrechnen. Feedback über die Position hast du jetzt nicht, oder? LG, Richard
Doch ich möchte Encoder verwenden. Die haben eine Auflösung von 25µm bis 0,5µm je nachdem welchen ich verwende. Ich habe mir um die 1000dpi vorgestellt. Das wären dann die 25µm. Das reicht mir aus. Aber das ist nur die Auflösung mit der ich die Position anfahren kann. In dem Bereich denke ich ist der Laser schon nicht mehr zu fokusieren. Aber das muss ich noch testen. So weit bin ich noch nicht. Meine Überlegung war dann, dass ich einen Normal-Mode einbaue. Der druckt dann mit der halben Auflösung und einen High-Resolution-Mode. Der nutzt dann die 1000dpi. Das dauert dann natürlich länger. Aber wenn ich an früher denke als ich die Folien noch mit dem Tintenstrahldrucker gemacht habe, wird das immer noch schneller sein. Bis da die Tinte richtig trocken war haben die Vorlagen auch einen Tag auf der Heizung gelegen. Und die Auflösung damals waren 600dpi. Das hat mir ausgereicht. Wenn ich dieses Ergebnis erreiche bin ich absolut zufrieden. Weißt du schon was du für nen Controller nimmst? Bleibt es bei dem Arm? Gruß
Jens schrieb: > Ich habe mir um die 1000dpi vorgestellt Äh - worin besteht denn der Unterschied zwischen 1000 dpi und 1 mil Auflösung? Verrechne ich mich da oder sprecht/schreibt ihr von der gleichen Auflösung? Sportlich - wie ich feststellen musste :-)
Ich werde parallel 2 Lösungen entwickeln. AVR und ARM. 30-60 minuten fürs SS Belichten ist mir definitiv zu lang. Das "Teil" muss schon mehr können das sich das auszahlt. Ich dachte an: AVR für Zeilenweise belichten und ARM für -> Daten werden über eine SD Karte (oder USB) eingelesen, Bohren und Fräsen ohne Werkzeugwechsel-Laser bleibt permanent oben, Steuerung über Touch oder/und Rotary Encoder. Diese Encoder für über 150 EUR für 20 cm sind schon recht teuer. Sollte ich eine "echte" Fräße implementieren können ist das leider auch ein muss. lg, Richard
Richard schrieb: > Ich werde parallel 2 Lösungen entwickeln. AVR und ARM. Richard schrieb: > Das "Teil" muss schon mehr können das sich das auszahlt. > > Ich dachte an: > AVR für Zeilenweise belichten und ARM für -> > Daten werden über eine SD Karte (oder USB) eingelesen, > Bohren und Fräsen ohne Werkzeugwechsel-Laser bleibt permanent oben, > Steuerung über Touch oder/und Rotary Encoder. Hoch-Leistungssportler :-) - ich bin beeindruckt und gespannt.
@Dieter Dir schulde ich noch diese Aufnahmen und die Platine ;) Womit fotografierst du eigentlich?
Richard schrieb: > Womit fotografierst du eigentlich? Hallo Richard, für die ganz feinen Aufnahmen nutze ich ein Billig-China-USB-Mikroskop. Draufdrücken, fokussieren, festhalten und auf den Aufnahmeknopf drücken (Sche...-Ding). Ansonsten eine kompakte Digital-Kamera mit Makro-Option. Gruß Dieter
Angehängte Dateien:
-

taster.jpg
62 KB
Hallo. ich fange ja mit dem Bohren an, das Belichten will ich hinterher realisieren. Bisher klappt das ganz gut, jetzt brauche ich die Höheneinstellung für die Bohrer. Von Hand möchte ich das nicht mehr machen, also Taster suchen als Werkzeuglängentaster. In meinem Fundus habe ich den oben abgebildeten Taster gefunden, mit 7 mm Höhe ist der ideal. Den Händler von dem ich ihn habe gibt es bei Ebay auch noch, so dass ich gleich noch Reserve für kleines Geld bestellt habe. Für Jens könnte das interessant sein, für andere ev. auch. Grüße, Guido
Angehängte Dateien:
-

Taster2.JPG
57 KB
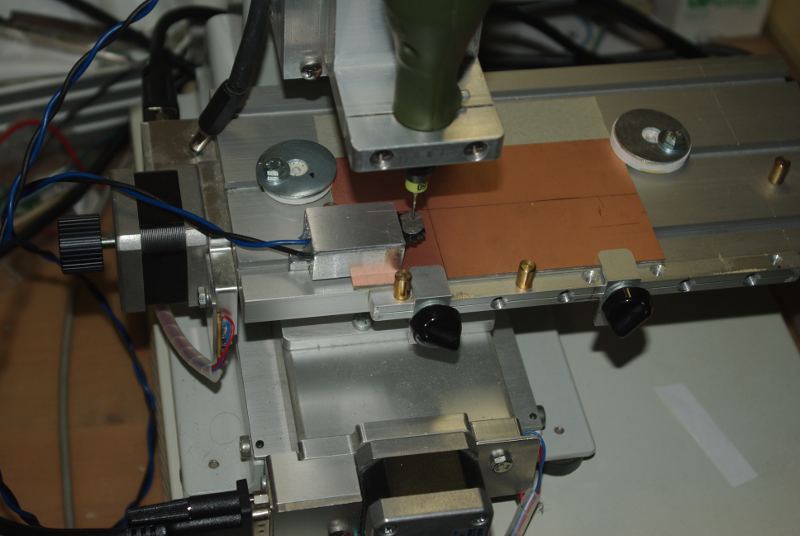
Im Moment noch mit der Micromot 40 von Proxxon. Ich habe auf Vorrat noch einen BL-Innenläufer, aber das wird noch eine Mordsarbeit auf der Drehbank bis der brauchbar ist. So sieht es jetzt aus, s. oben.
Richard schrieb: > @Dieter Dir schulde ich noch diese Aufnahmen und die Platine ;) Hallo Richard, ja - - - - - und ... ? :-) Da ich bei der Bohrerei nicht mitreden kann und noch auf Teile warte, hake ich einfach mal nach ... Gruß Dieter
Guido B. schrieb: > So sieht es jetzt aus, s. oben. Hallo Guido, ich bin ein "mechanischer Krüppel" - habe ich oft genug betont ... Wenn ich das Bild richtig deute, hast Du die Motore an den beweglichen Achsen angebracht - bringt man die nicht üblicherweise an den feststehenden Teilen an und bewegt damit die (beweglichen) Achsen? Den "Missbrauch" der Unterlegscheiben (wie ich es als Laie sehe) finde ich interessant :-) Gruß Dieter
Hallo Dieter, Dieter F. schrieb: > Wenn ich das Bild richtig deute, hast Du die Motore an den beweglichen > Achsen angebracht - bringt man die nicht üblicherweise an den > feststehenden Teilen an und bewegt damit die (beweglichen) Achsen? das ist eine Grundsatzentscheidung, die zum Bohren und Belichten eigentlich nicht relevant ist. Es geht um Kreuztisch versus Portal- maschine. Zum Fräsen werden im professionellen Bereich eigentlich nur Kreuztische verwendet, weil es unsinnig ist die schwere Z-Spindel mit ihrer enorm steifen Führung samt Antrieb spazieren zu fahren. Allerdings ist ein Kreuztisch schwieriger zu konstruieren, da er auf Grund des geringeren Achsabstandes viel höhere Drehmomente verkraften muss als die Lager einer Portalmaschine. In unserer Größenordnung also Geschmackssache, mit Tonnen an Masse argumentieren wir ja nicht. Dieter F. schrieb: > Den "Missbrauch" der Unterlegscheiben (wie ich es als Laie sehe) finde > ich interessant :-) Die Scheiben (Karosseriescheiben?) waren in einem Sortiment, ev. sogar von Aldi. Lassen sich prima bearbeiten und der Kunststoff drunter ist halt nur weicher PVC-Schaum. Mir war der Excenter wichtig, da ich ja nur die 3 T-Nuten habe. Grüße, Guido
Hey, du bist schon weit gekommen. Ist der 40er nicht zu schwach? Ich dachte auch das mir zZ das Bohren wichtiger ist. Hast du schon ein Laser? Das ist gerade mein größtes Problem. Da ich auch fräsen will, nehme ich eine Kress 1050. Ich möchte nicht jedes mal den Bohrer wechseln müssen. Wie willst du das lösen? Wie weit bist du schon? Kannst du eine Gerber Datei einlesen und die Löcher bohren/fräsen lassen? lg, Richard
Angehängte Dateien:
-

platine2.png
42 KB
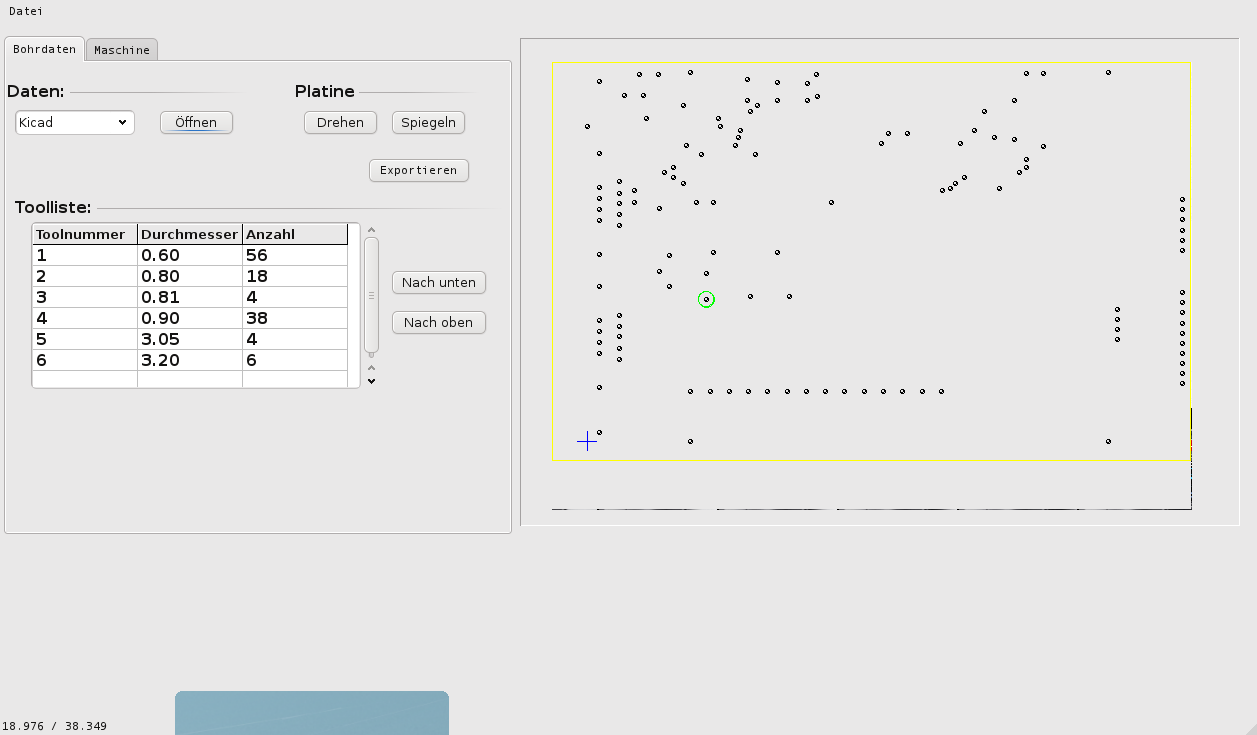
Hallo Richard, klar sind mit der Mikromot keine Wunder zu erwarten, aber sie funktioniert inklusive Drehzahlregelung. Bohrerwechsel müssen schon sein, Mehrspindelmaschinen sind von der Geschwindigkeit klar im Vorteil, für uns spielt die Zeit ja aber eine untergeordnete Rolle. Richard schrieb: > Wie weit bist du schon? > Kannst du eine Gerber Datei einlesen und die Löcher bohren/fräsen > lassen? Die Bohrdaten lese ich aus der Excellon-Datei ein, die Kicad liefert. In einem PC-Programm (s. Bild) kann ich sie optimieren und in ein binäres Format wandeln. Die Daten schreibe ich auf eine SD-Karte und lese sie mit der Bohrmaschine wieder ein. Das funktioniert soweit und ich hoffe, dass das Bohren nächste Woche komplett ist. Dann kommt die Belichterachse an die Reihe. ;-) Richard schrieb: > Hast du schon ein Laser? Das ist gerade mein größtes Problem. Ich habe eine Blue-Ray-Diode in einem Kollimator für einen roten Laserpointer. Eine Konvexlinse bündelt mir den Strahl auf die Belichtungsfläche. Weiter oben habe ich schon Bilder davon gepostet. So long, Guido
Guido B. schrieb: > Eine Konvexlinse bündelt mir den Strahl auf die > Belichtungsfläche. Weisst du schon wie groß dein Belichtungspunkt ist?
Richard schrieb: > Weisst du schon wie groß dein Belichtungspunkt ist? Deutlich unter 0,1 mm. Wir haben im alten Thread, etwa im März, Testergebnisse mit Thermopapier gepostet, mit der Suche nach Thermopapier findest du die recht schnell.
Hallo an alle, bei mir geht es auch wieder ein Stückchen weiter. Ich habe meine Platine mit dem Lasertreiber fertig. Die wird direkt im Schlitten monitert. Ich habe heute die ersten Tests mit dem Lasertreiber gemacht. Dazu habe ich die Schaltung aus meinem alten Drucker weiter entwickelt. Ich kann nun die Leistung in Software steuern. Und die Flanken lassen sich auch sehen. Ich habe sie getestet mit einer Frequenz von 100kHz und die sind da immer noch sehr steil. Ich komme da an die Messgrenze aber die Flanke ist im Bereich 20ns schnell. Dazu habe ich beim Einschalten gar keinen Überschwinger und beim Ausschalten eine kleine Spitze. Die ist aber auch nur 100ns lang. Für den Laser ist das denke ich kein Problem. Wenn ich den Aufbau optimieren würde wäre der sicher auch kleiner. Aber ich bleib bei meinem Lochraster für den Aufbau. Zudem, die Frequenz die ich brauche liegt im Bereich 10kHz. Also genug Luft für den Treiber. Ich habe mich nun auch dazu entschieden die magnetischen Sensoren für den Laserschlitten zu verwenden. Da sagt mir die höhere Auflösung mehr zu als bei den optischen. Den Magnetstreifen habe ich dazu auch schon verklebt. Als nächstes liegen dann einige Tests zur Schrittweite der Motoren an. Da stellt sich dann raus, ob man die Sensoren überhaupt braucht. Soweit von mir. Wie ist es bei euch? Grüße, Jens
Angehängte Dateien:
-

P1000318s.jpg
230 KB
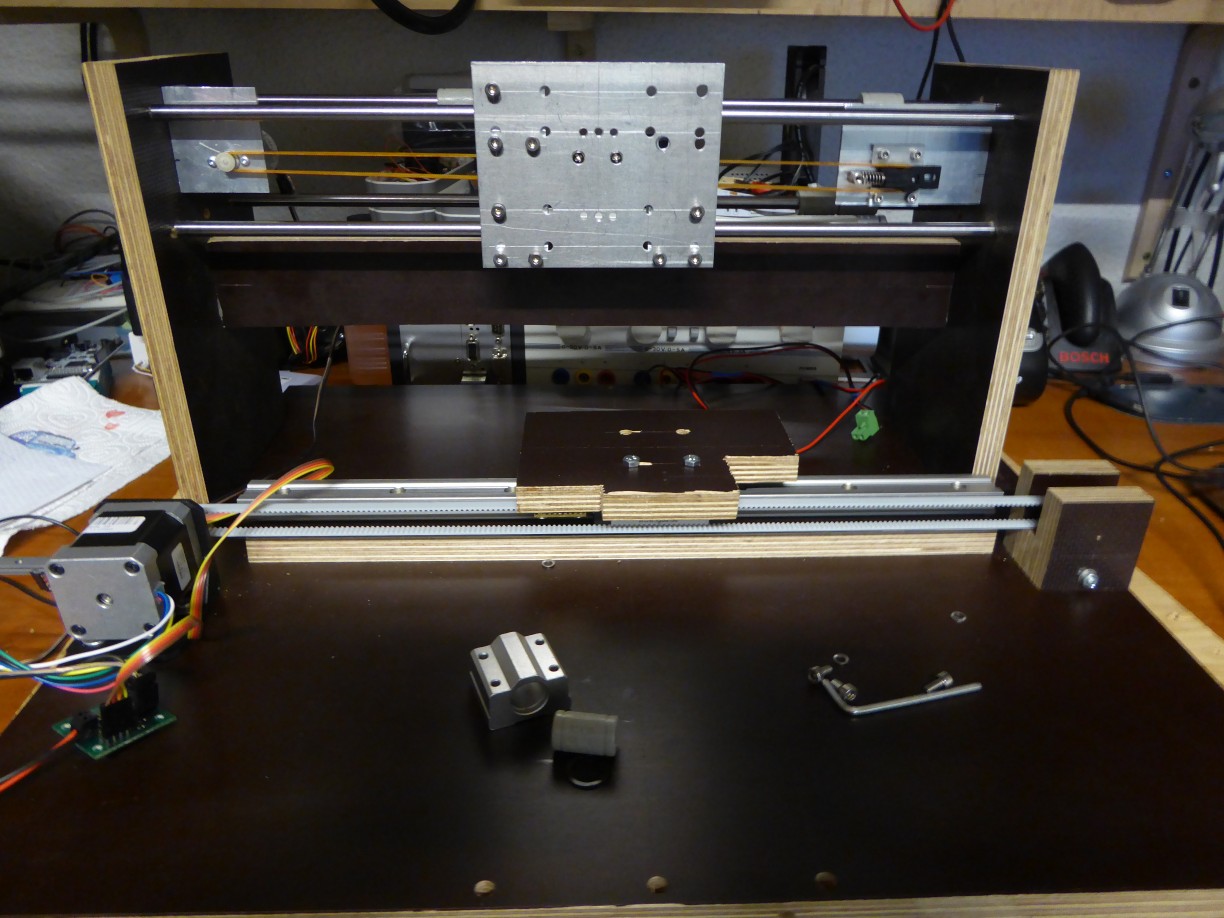
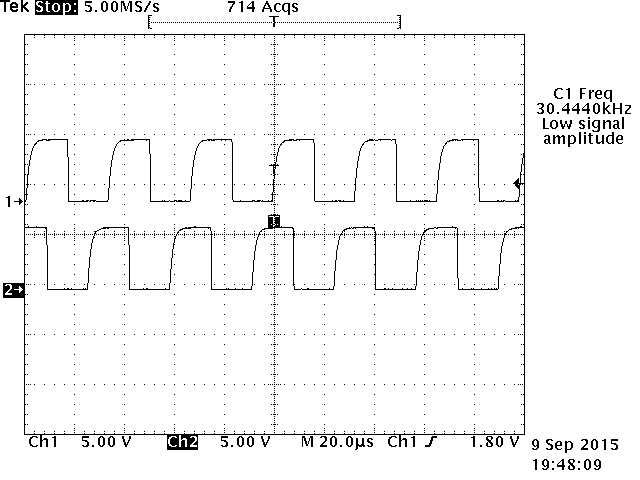{kind=link}
ich hatte noch nicht viel Zeit um weiterzubauen, jetzt ist auch noch mein TV kaputt gegangen und ich habe wieder eine neue Baustelle. Fast fertig ist der X-Schlitten für die Laserdiode, der fährt aber noch nicht zufriedenstellend. Ich habe Gleitlager genommen und habe kein Loslager, und obwohl ich die beiden Seitenteile mit Schraubzwingen zusammengepresst hatte zum Bohren sind die Wellen nicht exakt parallel (ca. 2/10 mm differenz). Die habe ich schon bestmöglich korrigiert, aber wenn ich 4 feste Lager am Schlitten habe dann klemmts. Dadurch das ich den DC Motor von einem Drucker nehme und den Zahnriemen direkt antreibe machen sich kleine Unregelmässigkeiten im Lauf bemerkbar. Ich habe den Motor bisher aber auch nur mit konstanter Spannung betrieben, wenn der optische Sensor dran ist kann das eventuell ausgeregelt werden. Im Bild vorne links ist die H-Brücke für den DC Motor, der kann damit per PWM angesteuert werden. Habe den Controller gerade nicht hier liegen, wenn es läuft kann ich mal ein Video machen. Die Y-Achse ist unkomplizierter, der Schrittmotor hat reichlich Power und der hat keine Probleme den Igus Schlitten zu bewegen. Auf die Holzplatte komme noch eine Aluplatte als Träger für die Platinen. Ist erstmal ein simpler Aufbau, da stecken trotzdem schon einige Stunden Arbeit drin. Ich wusste nicht das die Aluprofile schon so günstig sind, damit wäre das vermutlich einfacher geworden.
Ich bin dabei die Teile für die X-Achse zu besorgen. http://www.ebay.com/itm/290870738150?rmvSB=true Sollte eine max. Fehler-Toleranz von 0,05 auf 300mm haben. und das hier: http://www.ebay.com/itm/261111318616?rmvSB=true Für die Y-Achse mache ich eine Doppelführung (Fräse und Laser).
Mensch das sieht doch schon gut aus! Ich bin auf die ersten Tests gespannt. Bei mir ist da aber noch ein riesiges Stück Software zu machen. Nämlich die PC Seite. Ich habe da zwar was was funktioniert, aber das ist nicht sauber programmiert. Da muss ich nochmal ran. @Richard: So wie ich dich verstanden habe machst du ja auch so einen Aufbau wie ich. Also Koordinatentisch mit Verfahrachsen für Laser und Bohrer/Fräser. Hast du dir schon Gedanken gemacht, wie man diese beiden Achsen auch sauber übereinander bekommt. Die können ja auch leicht verdreht zueinander stehen. Also müsste man die Daten für die Maschine auch drehen können. Und die Ursprungspunkte müssten einstellbar sein. Gibt es da einfache Verfahren das auch auszumessen. Vielleicht könnte man das auch in eine Art Kallibrierlauf des Druckers einbauen. Wie wirst du das machen? Grüße, Jens
Hallo, Bei mir wird das jetzt schon sehr komplex. Ich überlege mitlerweile ob ich ein china Laser Grawur-Maschine als Belichter missbrauchen soll und die Fräse unabhängig aufbauen sollte. http://www.dx.com/de/p/neje-500mw-desktop-violet-laser-engraving-machine-printer-diy-kit-silver-transparent-380428#.ViTBQiuR2sg Kennt jemand diese Maschine? Alleine deswegen, weil die CNC Maschine sehr viel Abfall produziert, welches beim Belichter zu Problemen führen könnte. Ansonsten will ich das so, wie hier lösen: http://www.google.com/imgres?imgurl=http://www.neo7cnc.com/images/machine.jpg&imgrefurl=http://www.neo7cnc.com/top.html&h=737&w=1193&tbnid=amxMsXSp_5qs7M:&docid=iNKtGVxRVK8sNM&ei=ub8kVtrYGILJa_XosfgO&tbm=isch&ved=0CCsQMygPMA9qFQoTCJqZ6_OjzsgCFYLkGgoddXQM7w Vorne sollte die Fräse, hinten der Laser angebracht sein. Daten via SD Card übermitteln wird nicht gehen. Diese Maschine bräuchte einen stand PC. Habe eine Software gefunden: http://www.machsupport.com/software/mach3/ Diese dürfte alles was du angesprochen hast, inkl. Positionierung, Null Punkt Setzen, Toleranz und Co einstellen können. Bei mir hängt jetzt alles davon ab, ob ich die angepeilte Auflösung mechanisch erreichen kann oder nicht. Dazu brauche ich noch eine Bodenplatte, Verbindungsstücke und die Halterungen. 0,025mm Belichtungspunkt und Zeilenbreite (auf 100mm) finde ich ok. Theoretisch wäre eine 100*160 mal Platine in 33 min fertig. Einseitig. Damit könnte ich leben. Ich bin ohne die Sachen weiter oben jetzt schon bei ~400 EUR. Einen Fräsmotor habe ich auch noch nicht. Ich rechne mit 1500 bis 2000 EUR. lg, Richard
{kind=link}
Hi, bei euch geht es ja richtig rund. Mittlerweile bin ich wohl relativ alleine auf weiter Flur mit meinem Ansatz ... Ich bin wieder einen Schritt zurück :-( Bin mit den China-Linearschienen voll reingefallen. Das sind eher Linear-Ruckel-Schienen. Für mich vollkommen unbrauchbar. Werde mich jetzt nach Alternativen in Europa umschauen - mit Garantie und Rückgaberecht. Jens schrieb: > Hast du dir schon Gedanken gemacht, wie man diese beiden Achsen auch > sauber übereinander bekommt. Parallel zueinander sollten die schon laufen, sonst hast Du echt Probleme. Das andere sehe ich nicht so tragisch. An der Top-Seite die Platine einfach umgeschlagen (Überschlag) kannst Du mit gleicher horizontaler Steuerung - vertikal genau entgegengesetzt (also Fahrtrichtung einfach umgedreht) - halt von der Rückseite aus Bohren. Richard schrieb: > Habe eine Software gefunden: http://www.machsupport.com/software/mach3/ Warum nimmst Du nicht GRBL? Gruß Dieter
Hier ist eine Bohrsimulation erfolgreich durchgelaufen, nach einigen Fehlerkorrekturen läuft es wie gewünscht. Morgen mal noch passende Platinenabschnitte zuschneiden und ein Gehäuse für die Steuerung der Mikromot zusammenkleben, dann mal abwarten und ev. filmen. @ Richard: Das wird aber schon massiv, für Platinen allein ist das sicher nicht gedacht. @ Dieter: Jens meint wohl die Rechtwinkligkeit der Achsen zueinander. Die ist in der Tat ein Problem. Grüße, Guido
Hallo Dieter F. schrieb: > Bin mit den China-Linearschienen > voll reingefallen. Deswegen habe ich einen Link veöffentlicht, das jeder sieht was ich benutzen will. Was genau hast du gekauft (Link)? Wie viel hast du bezahlt? Wo ist das Problem? Ehrlich gesagt finde ich deine Lösung mitn Spiegel wesentlich besser und Effektiver. Ich kann das aber nicht so einfach "nachbauen". Ich bräuchte ausserdem auch noch eine Fräse. GRBL will ich zum testen nehmen. Weiter oben habt Ihr gemeint, das ein Arduino zu langsam für die Steuerung sei. lg, Richard
Guido B. schrieb: > dann mal abwarten > und ev. filmen. Hallo Guido, hört sich gut an :-) bin sehr gespannt- Guido B. schrieb: > @ Dieter: Jens meint wohl die Rechtwinkligkeit der Achsen zueinander. > Die ist in der Tat ein Problem. Das verstehe ich ehrlich gesagt nicht. Wenn ich auf einer Achse (parallele Führung auf 2 Seiten) mit entsprechenden Führungen eine 2- Achse aufsetze, dann sollte die 2. Achse (wenn eine entsprechende Länge der 1. Achse zur Führung genutzt wird) bei sauberem Aufbau rechwinklig zur 1. Achse stehen. Selbst wenn eine Verschiebung da sein sollte ist diese in beiden Richtungen des Verfahrwegs der 2. Achse doch gleich - oder? Aber egal, davon habe ich schlicht keine Ahnung. Richard schrieb: > Deswegen habe ich einen Link veöffentlicht, > das jeder sieht was ich benutzen will Ist nicht geheim: http://www.aliexpress.com/item/Free-shipping-for-9mm-Linear-Guide-MGN9-L-250mm-linear-rail-way-MGN9C-or-MGN9H-Long/32323804779.html Auf diesen Schrott bin ich hereingefallen- Die Bewegung erfolgt nur ruckelig und verhindert eine sichere Bewegung. Jede Baumark-Schubladenführung (auch die Billigste!) läuft da besser. Ich habe vermutlich C-Ware / Ausschuss erwischt. Kommt noch dazu, das das angegebene Maß E falsch ist (15 statt 7,5 mm). Die 7,5 mm hätte ich gebraucht ... Selbst Schuld, nie wieder Mechanik aus China (das die 7,5 nicht sein können hätte ich mir auch ausrechnen könne - habe ich aber nicht, sondern mich auf die Angabe verlassen). Richard schrieb: > Ehrlich gesagt finde ich deine Lösung mitn Spiegel wesentlich besser und > Effektiver. Besser - weiß ich nicht, eher anders. Der große Vorteil ist das (weitgehende) Fehlen mechanischer Erschütterungen- Effektiver - nein. Bei der Spiegel-Version wird immer (teilweise dunkel) die gesamte Linienbreite abgefahren. Das ist bei kleinen Platinen ser ineffizient. Lediglich die fehlende Umkehrzeit bringt einen Vorteil. Mich wundert eigentlich, dass die Galvo-Lösung nicht weiter verfolgt wird. Vielleicht gehe ich diese als nächste mal an. Man muss sich eine gescheite "Tisch-Steuerung" ausdenken, damit der Laserstarhl immer im gleichen Abstand auf die Platine trifft. Dann sollte man die Vorteile beider Lösungen nutzen. Den Fokus dynmaisch anzupassen nehme ich mal nicht als sinnvolle Lösung an (weil ich es gar nicht könnte :-) ) Richard schrieb: > Weiter oben habt Ihr gemeint, das ein Arduino zu langsam für die > Steuerung sei. Ich nicht - weiß es aber auch nicht. "Albert der Bastler" hat da einen lesenswerten Thread und eine ständig weiterentwickelte SW, die er auch "User-Wünschen" anpasst, wenn es in seine Richtung geht. Gruß Dieter
Hallo, zu meiner Mechanik: Im Prinzip hast du Recht Dieter, die müssten parallel sein. Aber ich dachte auch schon, dass Riemen kein Umkehrspiel hatten, da ich das mal wo gelesen hatte. Kleine Toleranzen sind immer. Also: Der Laser und der Bohrer laufen auf dem Gleichen Träger. Die sollten parallel sein. Aber was wenn nicht. Was ist, wenn die auf 300mm um 0,5mm auseinanderlaufen. Das ist nicht viel, aber wenn ich da schon belichte, will ich beim Bohren auch die Löcher treffen. Und das Ganze läuft auf dem Vorschub. Da brauche ich unbedingt den rechten Winkel sonst ist die Platine in Richtung Parallelogramm verschoben. Und das kann schon leichter sein. Und falls das der Fall ist, dann will ich nicht meinen Aufbau neu machen, sondern ein paar Werte in Software eintippen, die mir das korrigieren. So ist die Idee. Ich habe mir da heute auch noch ein paar Gedanken gemacht und bin denke ich weiter. Die Bohrkoordinaten sind in Software leicht zu drehen. Da muss man nur vier Punkte auf der Platine einmal antasten und kann die Werte berechnen. Bleibt noch der rechte Winkel. Beim Rechteck schneiden sind die Diagonalen gleich lang. Das kann man leicht messen. Ist das nicht der Fall dann ist das Gebilde ein Parallelogramm. Und aus den Längenunterschieden lassen sich dann auch die Winkel berechnen. Dann Dreht man das Layout um den Winkel und fertig. Sollte funktionieren. Aber ich bin noch nicht so weit mit dem Aufbau, dass ich das schon testen kann. Grüße, Jens
Hallo, Also ich will hier bestellen -> http://www.cnc-discount.de Auf seine Adresse bin ich durch Ebay gekommen. Da hast du alle rechte als EU Käufer und es geht schnell. Die Preise sind in etwa mit China vergleichbar. Blöderweise sind das (teilweise) auch Produkte aus China. Jens hat mit "Führung soll Parallel verlaufen" recht. Das ist nicht so einfach. Wirklich parallel wird das nur wenns gefräst ist. Dort stehe ich im Moment auch an... lg, Richard
@Dieter Wie viele Zeilen belichtest du in der Sekunde? zZ kann Ich (theoretisch) maximal 2 Zeilen belichten. Das habe ich vorhin gemeint.
Richard schrieb: > @Dieter Wie viele Zeilen belichtest du in der Sekunde? Hallo Richard, ich belichte aktuell jede Zeile genau 17 mal = 51 ms pro Belichtungszeile. Dazu kommen leider ca. 5 ms für das "Nachladen" der Werte von SD-Karte für die nächste Zeile. Dadurch "verliere" ich jeweils 2 - 3 Belichtungszyklen pro Zeile. Je nach gewählter Auflösung "in Fahrtrichtung" ergibt sich die Gesamt-Belichtungszeit. Da ich die Laserdiode weit unter ihrem Maximum betreibe kann ich die Belichtungszeit vermutlich halbieren (wenn mal alles fertig aufgebaut ist und ich einen neue LD-Treiberplatine fertig habe). Gruß Dieter
Hallo, @Dieter Ja, dann hast du über 15 Zeilen mehr pro Sekunde. Womit erzeugt Ihr das gcode für den "plotter"? lg, Richard
Hallo Richard, Dieter verwendet keinen Plotter, daher denke ich dass das eher an mich gerichtet ist. Ich verwende für meinen Drucker auch keinen G-Code. Ich steuere meine Schrittmotoren zu Fuß an und mache alles selbst. Für den Bohrer werde ich auch keinen G-Code verwenden. Ich werde die Koordinaten so anfahren und dann einfach durchbohren. Grüße, Jens
Hallo Jens, Ich dachte nur -> Sein Gerät muss auch Zeilenweise arbeiten. Schade. Noch jemand? Jens schrieb: > Ich werde die Koordinaten so anfahren und dann einfach durchbohren. Und wie implementierst du die Work/Home Funktion? Wie hoch ist eigentlich deine XY Auflösung? Noch immer 1000 dpi? Mitn 1,8° Stepper komme ich auf 0,025mm (0,0125mm mitn 0,9°) bei FullSteps und 0,00625mm bei Rendering (Mikrosteps). Ohne Übersetzung. Theoretisch. lg, Richard
Richard schrieb: > Sein Gerät muss auch Zeilenweise arbeiten. > Schade. Noch jemand? Hallo Richard, natürlich arbeitet der "Polygonspiegel-Belichter" auch Zeilenweise - genau wie ein Laserdrucker. Wenn Du 2 Zeilen pro Sekunde belichten kannst belichte ich aktuell um ca. den Faktor (500 ms / 55 ms) = 9 schneller. Das ist aber direkt abhängig vom Energie-Eintrag und der Wellenlänge des Lasers auf die Belichtungszeile in dem Bereich, in dem das Foto-Resist "empfindlich" ist. Bei einer blauen LD mit viel Leistung braucht das daher ggf. deutlich länger wie mit einer bluray-LD um UV-Bereich. Bei mir gibt es keinen G-Code. Nach 17 Belichtungszyklen fahre ich einfach einen (Mikro-) Schritt weiter ... Ich merke mir die gefahrenen Schritte und bei der Home-Funktion werden die (über eine berechnete Rampe gesteuert) wieder zurück zum Ausgangspunkt gefahren. Dort wird - aktuel mit Hilfe einer Gabellichtschranke - die genaue Home-Position angesteuert. Gruß Dieter
Hallo, @Dieter Beide, BluRay und die Laserdioden von Ebay arbeitet mit 405nm. Und wie ist das mit Work 0? Das wäre für doppelseitige Platinen wichtig. Andreas? Wie bereitest du die Daten vor? Eigentlich wollte ich beim Laserbelichter Projekt mitmachen, nicht alles alleine machen :( Ahh... Na ja, dann mache ich mal die neue Treiberplatine. Mitm Belichter :O zZ habe ich laute Einzelteile am Tisch herumliegen. lg, Richard
Hallo Richard, ich arbeite mit Linearmaßstäben. Das heißt, dass ich zu jeder Zeit meine aktuelle Maschinenpossition kenne. Die Bohrkoordinaten kann ich dann einfach anfahren. Ich fahre halt abwechselnd in X- und Y-Richtung bis ich angekommen bin. Gruß, Jens
Hallo, Pff... 500EUR für 500mm, mal zwei ist nicht gerade billig. Die Auflösung beträgt nur 7µ. Welche hast du verbaut? lg, Richard
Hallo Richard, ich verwende die Magnetischen Encoder wie oben beschrieben. Mit den passenden Magnetstreifen. Das kostet wesentlich weniger. Pro Achse etwa 15 Euro. Die Auflösung ist 25µm. Das entspricht etwa 1mil. Für mich vollkommen ausreichend. Gruß, Jens
@ Jens, kleiner Tip: Ich fahre erst diagonal und den Rest in X- oder Y-Richtung. Geht ein bisschen schneller. Grüße, Guido
Hallo Jens, Mir geht es nicht um eine extrem hohe Auflösung beim Belichten. Ich befürchte, das sich diese "Gerätefehler" summieren. Wenn die Maschine 0,01mm (oder weniger) bei der Führung schaft bin ich in ca. 3-6 min. mit eine 160 * 100 Platine fertig. lg, Richard
Richard schrieb: > Mir geht es nicht um eine extrem hohe Auflösung beim Belichten. Da kann man sich aber ein leichtes Schmunzeln kaum verkneifen ;-)
@Uwe Das kann ich mir vorstellen ;) So habe ich das aber nicht gemeint. Hochauflösend soll das Gerät schon arbeiten können. Ich will die Platine nicht mit so feinen Linien belichten. Ein in der Größe variabler Belichtungspunkt wäre ideal. Dann müsste jeder Leiterbahn nur einmal belichtet werden.
Hallo Richard, aber die Genauigkeit ist doch gerade der Sinn! Mein Laser ist genauer als ich das je mit meinem Tintenstrahldrucker hin bekommen würde. Die Zeit spielt für mich eher keine Rolle. Die Belichtung geht doch automatisch. Da ist das egal ob das sechs Minuten oder eine halbe Stunde dauert. Da gibt es dann eine Tasse Kaffee auf dem Balkon dazu und abwarten. Da bin ich entspannt. Wenn ich meine Zeit grob überschlage komme ich mit der 160mm x 100mm Platine auf etwa 20 bis 30 Minuten. Schneller wird nicht gehen. Ich belichte jede Zeile einmal, aber mehr als drei Zeile pro Sekunde wird mit meinem System nicht zu schaffen sein. Ich denke eher nur zwei. Ich habe mit meiner Laserdiode ein bisschen gespielt: Ich verwende eine BluRay Diode mit 120mW. Die gibt es für kleines Geld bei eBay. Der Fokus ist extrem klein. Und die Strahlqualität super. Ich habe mir auch Thermopapier besorgt um den Fokus einstellen zu können. Das funktioniert super! Ich denke man kann damit auch die ersten Belichtungsversuche fahren und braucht nicht gleich das teure Basismaterial. Aber das dauert noch. Momentan arbeite ich eher am Antrieb für meine Bohrspindel. Wie sich heraus gestellt hat sind die Regler für die BLCD Motoren die man so kaufen kann richtiger Mist. Das ist viel zu laut! Das muss ich selber machen. Also wieder ein XMega zur Hand nehmen und einen vernünftigen Regler mit feldorientierter Regelung aufbauen. Grüße, Jens
Richard schrieb: > bin ich in ca. 3-6 min. mit eine 160 * 100 Platine fertig. Hallo Richard, woher nimmst Du denn diese Weisheit? Hast Du bereits irgendwelche Versuche durchgeführt, von denen wir nichts wissen (vieleicht mit Deinen HiRes-Geräten)? Auf die Demonstration bin ich gespannt ... und hoffe, ich muss nicht bis St. Nimmerlein warten. Hast Du die Idee mit dem variablen Fokus mal weiter gedacht? Die eingebrachte Energiemenge pro Flächeneinheit muss einen bestimmten Wert erreichen, da sonst die Belichtung nicht zuverlässig erfolgt. Wenn du den Fokus vergrößerst musst Du natürlich auch entsprechend länger (variabel) belichten. Bestimmt interessant, so etwas umzusetzen. Ferner musst Du Dich dann auch optisch mit der unregelmäßigen Strahldivergenz der BluRay-LD auseinandersetzen - noch ein echtes Experten-Thema. Mal ganz abgesehen von der erforderlichen Technik, einen Fokus gezielt und reproduzierbar dyamisch in sehr kurzer Zeit auf bestimmte Werte zu bringen. Du hast viel vor ... Gruß Dieter PS: Ich habe es geschafft, wenigstens eine Linearführung halbwegs lauffähig zu machen - werde also erstmal mit einer Linearführung erste Versuche machen.
Hallo, das war mal eine Wochenendbeschäftigung! Sowas zu programmieren ist das Eine, es aber zu filmen und das Ergebnis in die Röhre zu schubsen was ganz anderes. Ersteres fällt mir deutlich leichter ;-). Hier der Link: https://youtu.be/BJ0Vn5V8Qvc Leider ist auf dem Display nicht viel zu erkennen, da ist die Kamera wohl an ihren oder meinen Grenzen. Die einzelnen Schritte erschließen sich aber wohl doch. Ich habe drei Platinen gebohrt und wenn ich die staple und an den Anlegekanten aufstoße, kann ich durch die Bohrungen sehen. Die Reproduzierbarkeit ist also ganz gut. Jetzt kommt die Laserachse an die Reihe. Grüße, Guido
Guido B. schrieb: > Leider ist auf dem Display nicht viel zu erkennen, Hallo Guido, sieht sehr gut aus - gratuliere. Man kann aber doch einige Dialoge erkennen - wenn nicht dann zumindest erahnen :-) Hast Du die Tastaur aus einem anderen Gerät genommen? Sieht richtig professionell aus. Auch der Koordinatentisch macht einen sehr guten Eindruck. Die Idee mit der "Höhen-Kalibrierung" der Z-Achse ist einfach und sehr praktisch. Da hätte ich viel umständlicher gedacht ... :-( Wirst Du die Laser-Einheit auch mit einer festen Z-Achse und Koordinatentisch realisieren? Gruß Dieter
Danke Dieter, für die Gratulation. Das Bediengerät war mal ein Nokia-Servicegerät, das ich sehr günstig bei Ebay ersteigert habe. Sieht viel besser aus als etwas selbstgebautes und die Tasten sind ein Traum. Die Idee dahinter war, dass ich es auch für andere Geräte nutzen kann und mir dann die Bedienelemente spare. Da steckt also ein ganzes, sehr flexibles, System dahinter. Ja, an der Positionierung des Längentasters habe ich lange geknobelt. Am Ende sieht es so logisch aus, aber ich musste erst mal darauf kommen, dass er auf der Platine aufliegen muss. ;-) Zum Belichten kommt die Z-Achse raus, die ist nur mit einem 10-mm-Rundstahl befestigt. Dann wird genauso die Laserachse als 2. Y-Achse montiert. In X-Richtung wird dann die Platine unter dem Laser durchgeschoben und dieser flitzt in Y-Richtung hin und her. Die Y-Achse dient dabei nur zur exakten Positionierung der Platine unter dem Laser. Die Laserachse muss ich aber erstmal fertig konstruieren, das muss ja am Ende auch passen. Also erstmal QCad statt Programmieren. Grüße, Guido
Ein sehr interessanter Test - für alle, die wie ich mit Microsteps spielen ... http://fabmo.de/news/kleiner-schrittmotortreibertest-laute-und-leise-motoren-eine-oddysee/
Dann noch ein Video... https://www.youtube.com/watch?v=P3ebhi-vZRY @Dieter: Dieter F. schrieb: > Hast Du bereits irgendwelche Versuche durchgeführt, von denen wir nichts > wissen (vieleicht mit Deinen HiRes-Geräten) Klar, ich habe es getestet. Ich poste jetzt nicht jede kleinigkeit. Angefangen habe ich mit NEMA 17 Motoren. Jetzt bin ich bei NEMA 23. HiRes wäre in diesem Fall 1µ oder weniger. Ohne Feedback über die Position wird das nicht gehen. Da musst du schon Jens fragen. Dieter F. schrieb: > Hast Du die Idee mit dem variablen Fokus mal weiter gedacht? Zu berechnen wäre das kein Problem. Leider ist die Mechanik zu teuer. Das hat sich somit erledigt. Die Zeiten für die Belichtung habe ich für eine 0,2mm Punkt-Belichtung berechnet ;) Pro Zeile 2 Fahrten ~400ms für eine Richtung + ~100ms reserve. LG, Richard
Richard schrieb: > Zu berechnen wäre das kein Problem. Richard schrieb: > Die Zeiten für die Belichtung habe ich für eine 0,2mm Punkt-Belichtung > berechnet ;) > Pro Zeile 2 Fahrten ~400ms für eine Richtung + ~100ms reserve Endlich mal ein wissenschaftlicher Ansatz. Kannst Du uns bitte Deine zugreundeliegende(n) Formel(n) und die verwendeten Eingangsparameter mitteilen? Das ist sicher für alle Mitleser interessant. Weiter so! Richard schrieb: > HiRes wäre in diesem Fall 1µ oder weniger. Hmm, wie passt das mit der 0,2 mm (~ 8 mil) Belichtung zusammen?
Ein 0,2mm Raster entspricht 127dpi. Meinst du das reicht von der Auflösung? Hast du da ein Foto vom Druck wie der dann aussieht? Wenn das reicht könnte man viel Zeit und Aufwand sparen! Ich rechne als HiRes mit 1000dpi und in LoRes mit 500dpi. Gruß, Jens
ZweiSchere schrieb: >> HiRes wäre in diesem Fall 1µ oder weniger. > > Hmm, wie passt das mit der 0,2 mm (~ 8 mil) Belichtung zusammen? Gar nicht. Meine Mechanik wird (dürfte)auf 300mm ~20-75µ Abweichung haben. Ohne die Position zu erfassen schaffe ich die 1µ nicht. ZweiSchere schrieb: > Kannst Du uns bitte Deine zugreundeliegende(n) Formel(n) und die > verwendeten Eingangsparameter mitteilen? Das ist sicher für alle > Mitleser interessant. Ich schneide (slice) das "Bild" nicht wie Jens und Dieter auf, sondern fahre gleich die Leiterbahnen entlang. Jens schrieb: > Meinst du das reicht von der Auflösung? Ich habe zZ keine andere Möglichkeit. Sonst dauert es zu lange. Ausser dem kann ich zZ kein gcode für die zeilenweise Belichtung schreiben. Jens schrieb: > Hast du da ein Foto vom Druck > wie der dann aussieht? Nein, Ich habe noch kein Laser. Ich fahre im "Leerlauf" hin und her. Wer weiß welche Überraschung mich noch erwartet... Jens schrieb: > Wenn das reicht könnte man viel Zeit und Aufwand sparen! Bei euch geht das nicht, weil Ihr die Zeilen anderes abfährt. 0.2mm ist zu groß... LG, Richard
Hallo Richard, jetzt habe ich das verstanden wie du das machst. Du hast im Prinzip einen CNC Koordinatentisch und fährst die gleichen Bahnen wie man auch beim Fräsen fahren würde. Nur dass du keinen Stichel sondern einen Laser nutzt und dann ätzt. Da ist deine Zeit sehr vom Layout abhängig. Wenn du nur die Leiterbahnen frei stellst bist du sicher schnell. Aber wenn du größere Flächen hast, die vom Kupfer befreit werden müssen, dann macht sich das bemerkbar. Aber du hast mit der Auflösung einen entscheidenden Vorteil: Man stelle sich einen Kreis vor. Bei der Zeilenbelichtung braucht man da einen hohe Auflösung, um den richtig darstellen zu können. Da du aber gleich einen Kreis fahren kannst kommst du mit der Breite von 0,2mm locker hin. Du kannst halt keine schmaleren Strukturen machen. Aber das ist meistens auch nicht notwendig. Gruß, Jens
@ZweiSchere Ich glaube kaum dass hier jemand meine Formelsammlung sehen will ;) Folgende Komponenten verwende ich: Kugelumlaufspindel 1605, NEMA 23 Stepper (1Nm, 2A/C) mit 1,8° pro Step zZ @24V Treiber: A4988 fürs testen, jetzt DRV8825 Steuerung: µC 328 fürs testen, jetzt Cortex. LG, Richard
Richard schrieb: > Ich schneide (slice) das "Bild" nicht wie Jens und Dieter auf, > sondern fahre gleich die Leiterbahnen entlang. Häh - das passt soch nicht mit Richard schrieb: > Pro Zeile 2 Fahrten ~400ms für eine Richtung + ~100ms reserve zusammen? Außerdem hast Du nicht erklärt, wie Du das genau berechnet hast (worum ich gebeten habe). Und wenn Jens Dich richtig verstanden hat, Jens schrieb: > Du hast im Prinzip > einen CNC Koordinatentisch und fährst die gleichen Bahnen wie man auch > beim Fräsen fahren würde. dann baust Du schlicht einen sog. Fotoplotter.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.